






 physics
physicsSimilar presentations:





. Лекция 16")



")
Сферическое движение твердого тела. Движение свободного твердого тела
1.
КИНЕМАТИКАСферическое движение твердого тела
Движение свободного твердого тела
2.
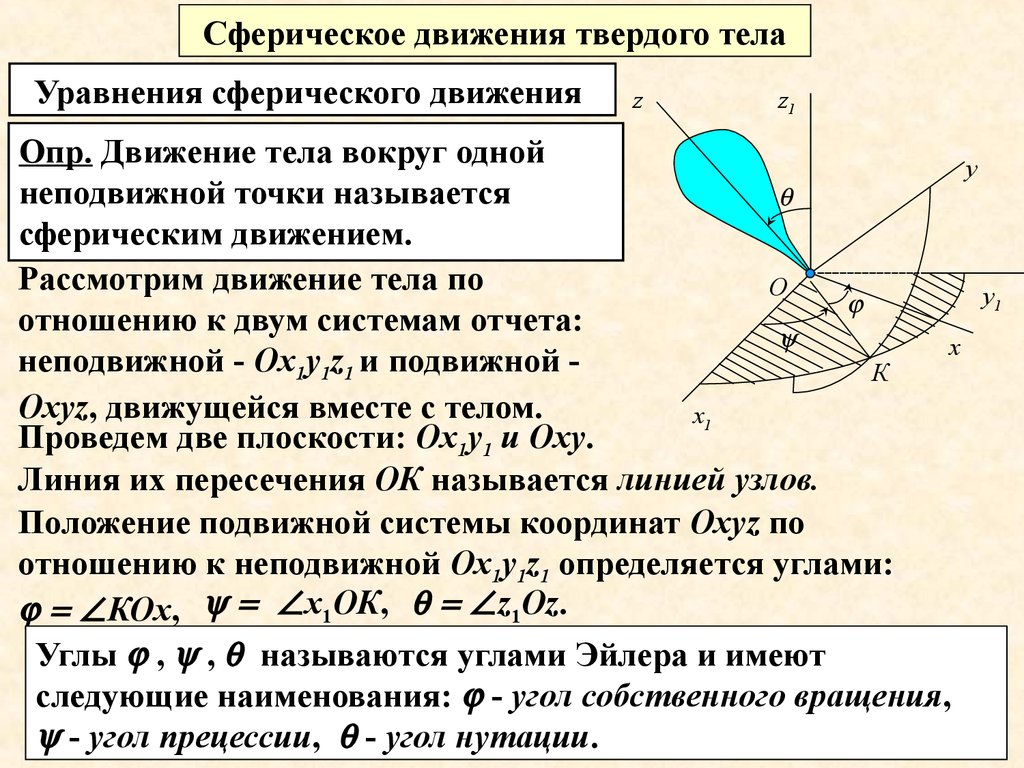
Сферическое движения твердого телаУравнения сферического движения
z
z1
Опр. Движение тела вокруг одной
у
неподвижной точки называется
сферическим движением.
Рассмотрим движение тела по
О
у1
отношению к двум системам отчета:
х
неподвижной - Ох1у1z1 и подвижной К
Охуz, движущейся вместе с телом.
х1
Проведем две плоскости: Ох1у1 и Оху.
Линия их пересечения ОК называется линией узлов.
Положение подвижной системы координат Охуz по
отношению к неподвижной Ох1у1z1 определяется углами:
КОх, х1ОК, z1Oz.
Углы , , называются углами Эйлера и имеют
следующие наименования: - угол собственного вращения,
- угол прецессии, - угол нутации.
3.
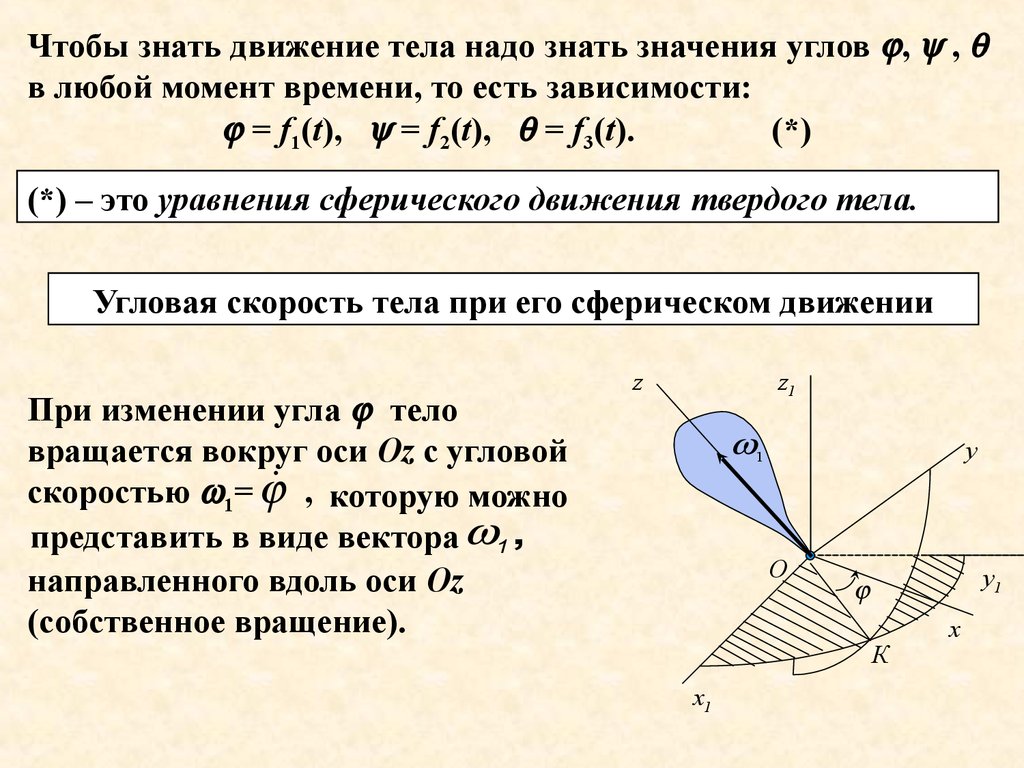
Чтобы знать движение тела надо знать значения углов , ,в любой момент времени, то есть зависимости:
= f1(t), = f2(t), = f3(t).
(*)
(*) – это уравнения сферического движения твердого тела.
Угловая скорость тела при его сферическом движении
При изменении угла тело
вращается вокруг оси Oz c угловой
скоростью 1= , которую можно
представить в виде вектора 1 ,
направленного вдоль оси Oz
(собственное вращение).
z
z1
1
у
О
у1
К
х1
х
4.
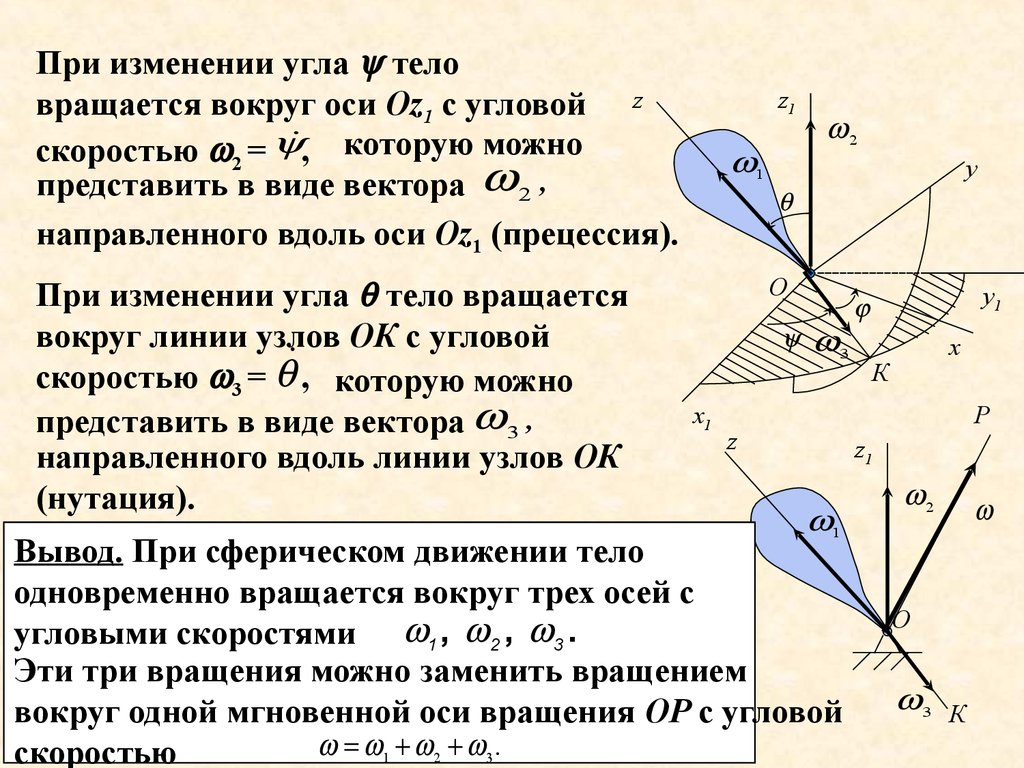
При изменении угла теловращается вокруг оси Oz1 c угловой z
скоростью 2 = , которую можно
представить в виде вектора 2 ,
направленного вдоль оси Oz1 (прецессия).
При изменении угла тело вращается
вокруг линии узлов OК c угловой
скоростью 3 = , которую можно
представить в виде вектора 3 ,
направленного вдоль линии узлов ОК
(нутация).
z1
1
2
у
О
3
х1
у1
х
К
Р
z
z1
1
Вывод. При сферическом движении тело
одновременно вращается вокруг трех осей с
угловыми скоростями 1 , 2 , 3 .
Эти три вращения можно заменить вращением
вокруг одной мгновенной
оси
вращения ОР с угловой
1 2 3 .
скоростью
2
О
3 К
5.
Геометрическая картина сферического движенияВ данный момент времени
тело
и
имеет угловую скорость
поворачивается вокруг оси ОР,
которая называется мгновенной осью
вращения.
Р1
Р
1
Р2
2
О
Ось ОР также меняет свое положение и в момент времени t1
будет занимать
положение ОР1, а угловая скорость станет
равной 1 .
В момент времени t2 ось будет занимать положение ОР2, а
угловая скорость станет равной 2 и т. д.
Вывод. Сферическое движение слагается из серии
последовательных элементарных поворотов вокруг
мгновенных осей вращения, проходящих через
неподвижную точку О.
6.
Угловое ускорение телаd
Опр. Векторная величина dt , (*) Р
А
характеризующая изменение с
течением времени угловой скорости и
по модулю, и по направлению,
называется угловым ускорением тела
или мгновенным угловым ускорением.
Р1
1
Р2
D
2
О
При изменении вектора
его конец А будет описывать в
пространстве
некоторую кривую АD, являющуюся годографом
вектора .
Сравнивая выражение
(*) с равенством V dr dt , видим, что
угловое ускорение
можно вычислять как скорость, с
которой конец вектора перемещается вдоль кривой АD.
В частности, направление совпадает с направлением
касательной к кривой АD в соответствующей точке.
7.
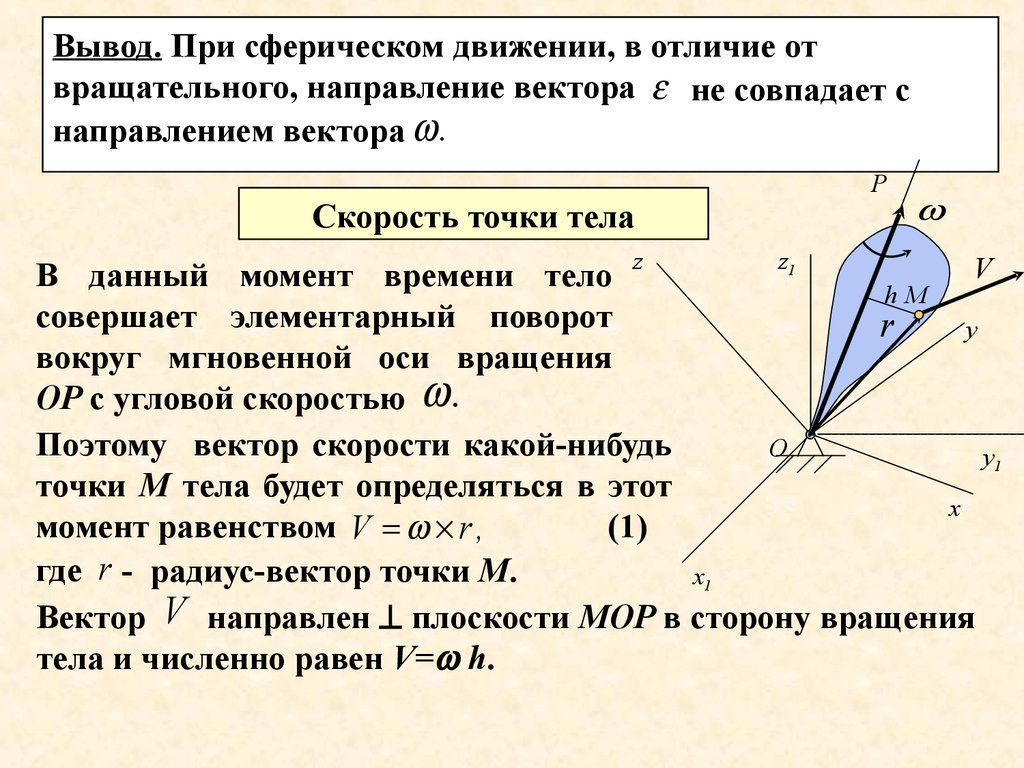
Вывод. При сферическом движении, в отличие отвращательного, направление вектора не совпадает с
направлением вектора .
Р
Скорость точки тела
z
z1
V
В данный момент времени тело
hМ
совершает элементарный поворот
r
у
вокруг мгновенной оси вращения
ОР с угловой скоростью .
Поэтому вектор скорости какой-нибудь
О
у1
точки М тела будет определяться
в этот
х
момент равенством V r ,
(1)
r
где - радиус-вектор
точки М.
х1
Вектор V направлен плоскости МОР в сторону вращения
тела и численно равен V= h.
8.
РГеометрически скорость любой точки
М можно найти, зная скорость V А
какой-нибудь точки и направление
скорости другой точки тела VВ .
1. Проведем плоскость
к VА
и плоскость к VВ .
VВ
М
VА
В
h1
h
VМ
А
О
Плоскости будут пересекаться по оси ОР.
2. Найдем угловую скорость = VА/ h.
3. Скорость точки М будет плоскости ОРМ и ее
величина VМ = · h1.
Ускорение точки тела
Дифференцируя равенство
(1) V r по времени, получим
а V ( r ) ( r ).
так как , а r V , то окончательно
а ( r ) ( V ).
9.
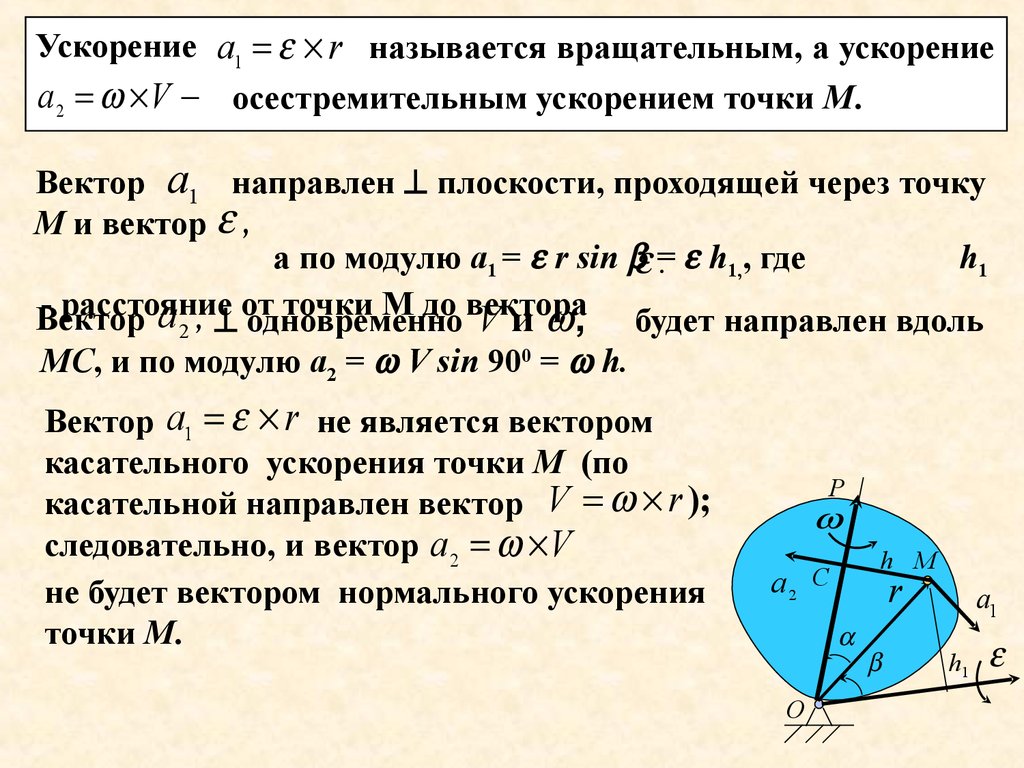
Ускорение а1 r называется вращательным, а ускорениеа2 V осестремительным ускорением точки М.
Вектор а1 направлен плоскости, проходящей через точку
М и вектор ,
а по модулю а1 = r sin =. h1,, где
h1
от точки М до вектора
-Вектор
расстояние
а , одновременно V и , будет направлен вдоль
2
МС, и по модулю а2 = V sin 900 = h.
Вектор а1 r не является вектором
касательного ускорения точки М (по
касательной направлен вектор V r );
следовательно, и вектор а2 V
не будет вектором нормального ускорения
точки М.
Р
C
а2
h М
О
а1
r
h1
10.
Движение свободного твердого телаУравнения движения
Опр. Движение твердого тела
называется свободным, если оно может
перемещаться как угодно по
отношению к системе отчета Ох1у1z1.
z1
А
х
О
Р
z
у
zА
уА у1
Выберем точку А за полюс и
хА
проведем, через него подвижные оси
х1
Охуz, которые движутся
поступательно вместе с полюсом, т.е. с телом.
По отношению к полюсу тело совершает сферическое
движение.
Вывод. Движение свободного твердого тела раскладывается на
поступательное вместе с полюсом и сферическое вокруг
полюса. Положение тела определяют 6 параметров:
координаты полюса – хА, уА, zА и углы Эйлера - , , .
11.
Положение тела в любой момент времени будет известно, еслибудут известны зависимости:
хА= f1 (t),
= f4 (t),
уА = f2 (t),
= f5 (t),
zА = f3 (t),
= f6 (t).
(*)
Уравнения (*) называются уравнениями движения свободного
твердого тела.
Геометрическая картина движения
Первые три уравнения (*) определяют поступательное
движение тела вместе с полюсом, а последние три
сферическое движение вокруг полюса.
Поступательное и сферическое движения происходят
одновременно.
12.
Вывод. Движениесвободного твердого тела
Р1
можно рассматривать как
слагающееся из
1
Р
поступательного движения,
2
при котором все точки тела
V
V
движутся как произвольно
выбранный полюс А со
А1
А1
V
скоростью V А , и из серии
А
элементарных поворотов с
угловой скоростью
вокруг мгновенных осей вращения, проходящих через полюс
А.
1
2
Р2
13.
Кинематические характеристики телаОсновными кинематическими характеристиками движения
являются скорость и ускорение полюса V A и а А , а также
вращения
угловая скорость и угловое ускорение и
вокруг полюса.
Как и в случае плоскопараллельного движения вращательная
часть движения от выбора полюса не зависит.
14.
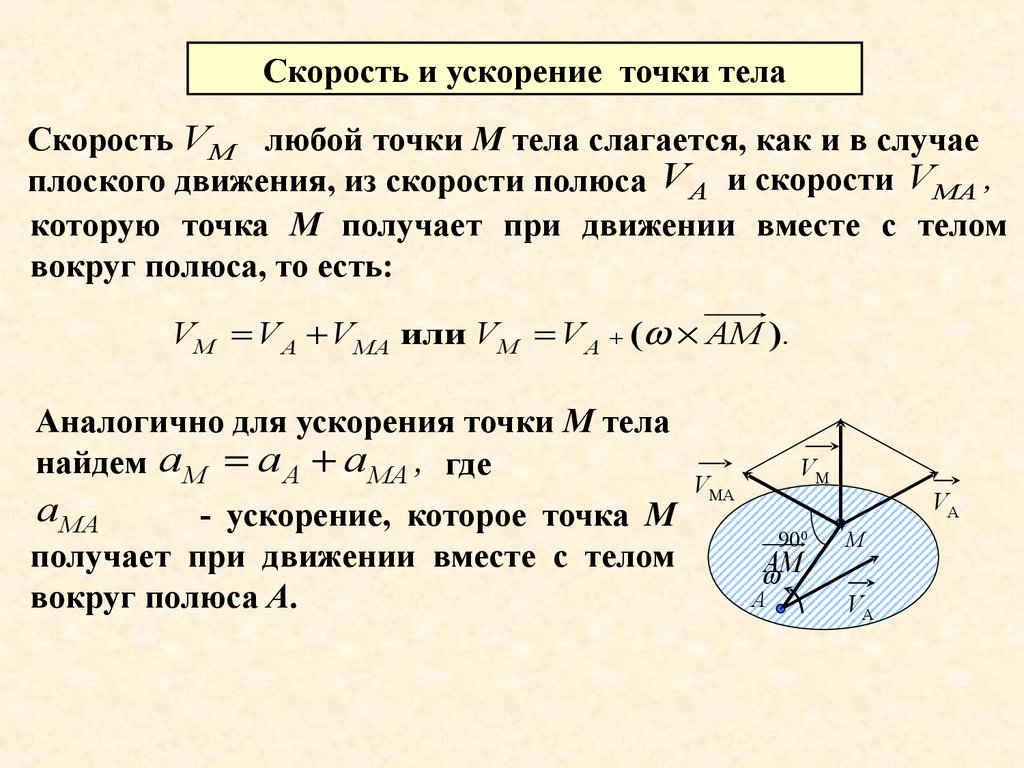
Скорость и ускорение точки телаСкорость VМ любой точки М тела слагается,
как и в случае
плоского движения, из скорости полюса V А и скорости VМА ,
которую точка М получает при движении вместе с телом
вокруг полюса, то есть:
VМ V А VМА или VМ V A ( АМ ).
Аналогично
точки М тела
для
ускорения
найдем а М а А а МА , где
а МА
- ускорение, которое точка М
получает при движении вместе с телом
вокруг полюса А.
VМ
VМА
VA
900
АМ
А
М
VA