
 mechanics
mechanicsSimilar presentations:
")





")
")


Динамика плоского движения твердого тела. Силы инерции и принцип Даламбера
1. Лекция 7 Аналитическая механика
Динамика плоского движения твердого тела.Сила инерции. Принцип Даламбера.
Главный вектор и главный момент сил инерции.
2.
Динамика плоского движения твердого телаПлоское движение может быть представлено, как
совокупность поступательного движения тела со скоростью
центра масс и вращательного движения вокруг центра масс:
Это
представление
было
2
2
Mv
I
C
использовано ранее при вычислении T
zC z
2
2
кинетической энергии.
Запишем дифференциальные уравнения
движения твердого тела. В кинематике xC f1 (t );
уравнения движения плоской фигуры были yC f 2 (t );
получены при использовании в качестве полюса
любой произвольной точки. В динамике в f 3 (t ).
качестве полюса выбирают центр масс:
Дифференциальные уравнения, описывающие движение
тела, найдем, используя теорему о движении центра масс,
дифференциальное уравнение, описывающее вращательное
движение тела вокруг центра масс и теорему об изменении
кинетического момента системы.
3.
M x C RxeFixe ;
M y C R ye
Fiye ; I z M ze
M ize .
Подобным образом с использованием различных теорем
динамики могут быть получены соответствующие уравнения
при рассмотрении динамики других более сложных видов
движения твердого тела (сферическое, свободное, ударное
взаимодействие).
Принцип Даламбера (Германа, Эйлера)
Это общий метод, при помощи которого уравнениям
динамики по форме придается вид уравнений статики.
Благодаря простоте этот метод получил широкое
применение во многих прикладных дисциплинах. ma P .
i
Запишем основное уравнение динамики точки:
Перенесем произведение массы на
0 Pi ma .
ускорение в правую часть:
Произведение массы на ускорение называется силой
инерции, которая направлена противоположно ускорению и
приложена к телу, сообщающему это ускорение: _
F ин ma .
4.
Получаем уравнение равновесия: геометрическаясумма приложенных к точке сил и силы инерции этой
точки равна нулю.
Сила инерции условно добавляется к действующим на
точку силам, образуя взаимно уравновешенную систему сил.
_
Принцип Даламбера для
Pi F ин 0.
материальной точки:
Принцип Даламбера для несвободной механической
системы
Запишем принцип Даламбера для k-той точки:
Здесь Pk – равнодействующая задаваемых
сил, приложенных к точке; Rk –
равнодействующая реакций связей.
_
P R F
k
k
_
Pk Rk F инk 0.
инk 0.
5.
Таким образом, геометрическая сумма_
главных векторов задаваемых сил, *
*
*
P
R
F
ин 0.
реакций
связи
и
сил
инерции
материальных точек равна нулю:
_
Умножим уравнение
rk Pk rk Rk rk F инk 0.
на радиус-вектор:
_
r P r R r F
k
k
k
k
k
инk 0.
Таким образом, геометрическая сумма главных
моментов задаваемых сил, реакций связи и сил инерции
материальных точек относительно любого центра равна
нулю:
M OP M OR M OFин 0.
В
динамике
за
центр _
_
приведения принимается центр *
F инk mk ak ;
масс
системы.
Получаем F ин
главный вектор сил инерции и
Fин
Fин
M
M
rk mk ak .
iC
главный момент сил инерции C
относительно центра масс:
6.
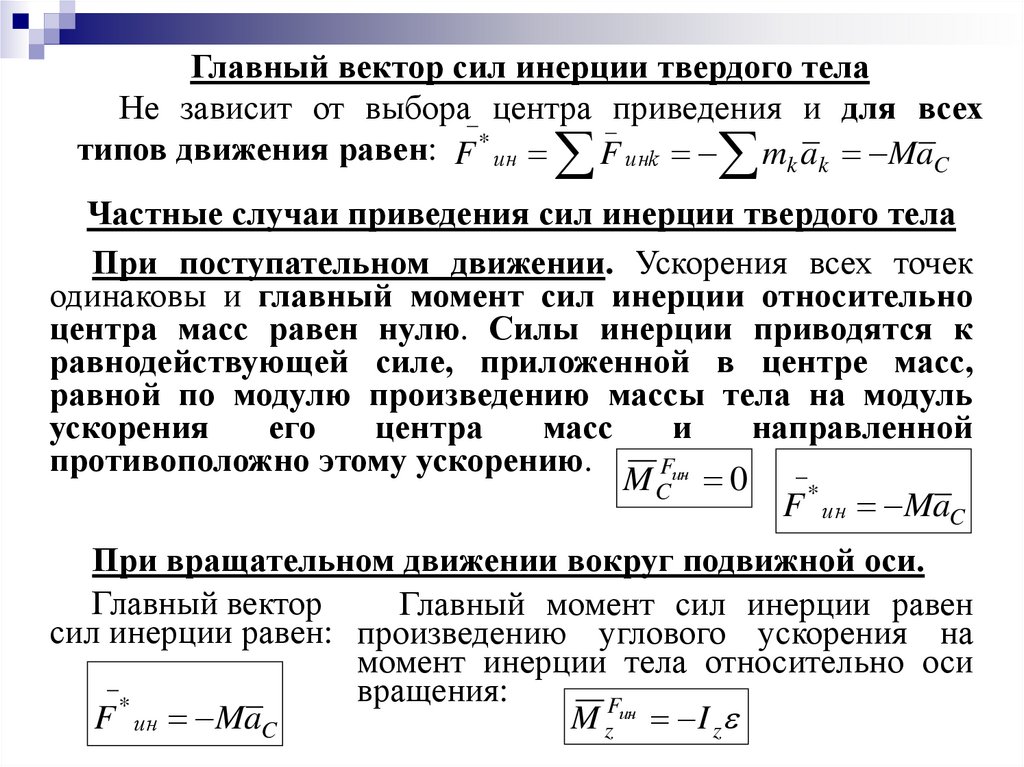
Главный вектор сил инерции твердого телаНе зависит от выбора_ центра _приведения и для всех
типов движения равен: F * ин
F инk mk ak MaC
Частные случаи приведения сил инерции твердого тела
При поступательном движении. Ускорения всех точек
одинаковы и главный момент сил инерции относительно
центра масс равен нулю. Силы инерции приводятся к
равнодействующей силе, приложенной в центре масс,
равной по модулю произведению массы тела на модуль
ускорения
его
центра
масс
и
направленной
противоположно этому ускорению.
M CFин 0 _*
F ин MaC
При вращательном движении вокруг подвижной оси.
Главный вектор
Главный момент сил инерции равен
сил инерции равен: произведению углового ускорения на
момент инерции тела относительно оси
_
вращения:
*
F ин MaC
M zFин I z
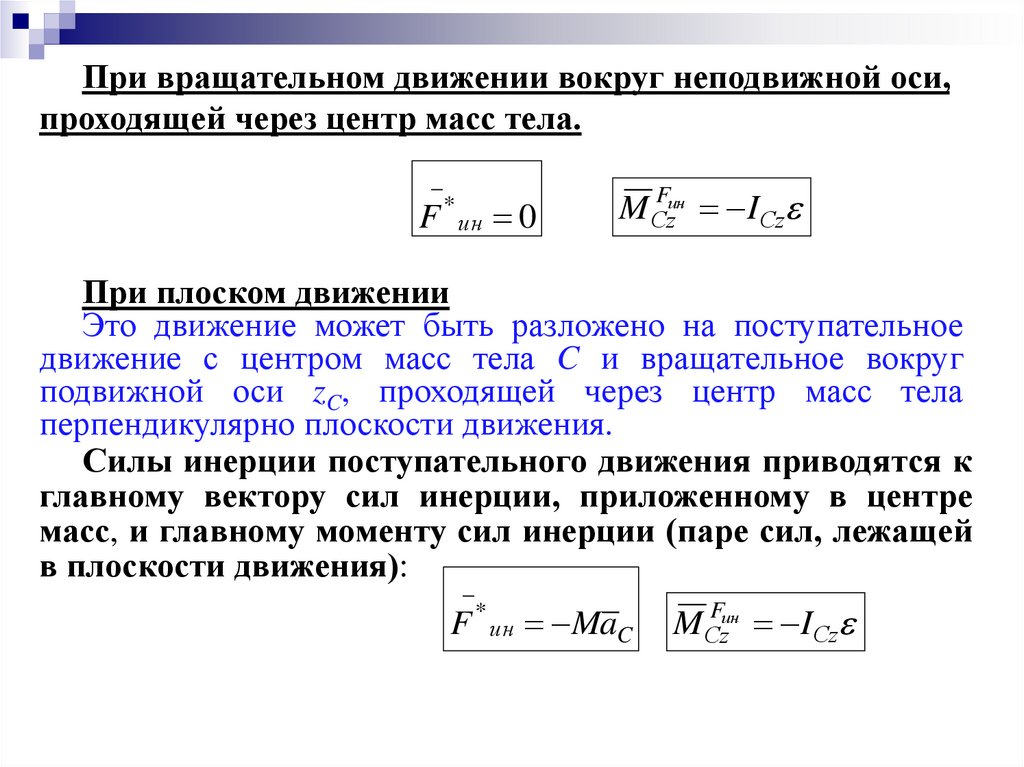
7.
При вращательном движении вокруг неподвижной оси,проходящей через центр масс тела.
_
F ин 0
*
Fин
M Сz
I Сz
При плоском движении
Это движение может быть разложено на поступательное
движение с центром масс тела C и вращательное вокруг
подвижной оси zC, проходящей через центр масс тела
перпендикулярно плоскости движения.
Силы инерции поступательного движения приводятся к
главному вектору сил инерции, приложенному в центре
масс, и главному моменту сил инерции (паре сил, лежащей
в плоскости движения):
_
F * ин MaC
Fин
M Сz
I Сz