




 electronics
electronicsSimilar presentations:


 самолета RRJ-95")







Автономное радионавигационное оборудование самолета RRJ-95
1. Автономное радионавигационное оборудование самолета RRJ-95
Подготовил:студент 4 курса
25.03.02
Вставский С.А
2. 1. Общие сведения об автономном пилотажно-навигационном оборудовании
Содержание1. Общие сведения об автономном пилотажно-навигационном оборудовании
2.СИСТЕМА МЕТЕОЛОКАЦИИ
3.СИСТЕМА ПРЕДОТВРАЩЕНИЯ СТОЛКНОВЕНИЙ В ВОЗДУХЕ И РАННЕГО ПРЕДУПРЕЖДЕНИЯ ПРИБЛИЖЕНИЯ К ЗЕМЛЕ
4.Техническая эксплуатация
5. Контроль знаний
3. 1. Общие сведения об автономном пилотажно-навигационном оборудовании
Системы автономного пилотажно-навигационного оборудования предоставляют информацию,определяющую в первую очередь безопасность воздушного судна без связи с какой-либо наземной
станцией. К такой информации относится пространственное положение ВС, местоположение опасных
рельефных зон, а также других воздушных судов.
(1) Система метеолокации
Система метеолокации (см. 34-42-00 ) представляет собой цифровой радиолокатор
Х-диапазона. Система используется для определения погодных условий впереди
самолета, определения мест грозовых образований и турбулентности, а также для
отображение рельефа местности. Информация отображается на дисплеях MFD.
(2) Система предотвращения столкновений в воздухе и раннего предупреждения приближения
к земле (T2CAS)
Система предотвращения столкновений в воздухе и раннего предупреждения приближения
к земле (T2CAS) (см. 34-43-00 ) служит для предупреждения столкновения в воздухе,
отслеживает траектории других самолетов с целью предотвращения возможности
столкновения. При возникновении потенциальной угрозы столкновения, система
предоставляет рекомендации пилотам в виде речевой и визуальной информации для
совершения маневра уклонения.
Система обеспечивает предотвращение столкновения самолета с наземными
препятствиями при управляемом полете. Она вырабатывает речевые и визуальные
сигналы об опасности с заданной периодичностью для предотвращения столкновения с
поверхностью земли при полёте вблизи земли.
4. 1. Общие сведения об автономном пилотажно-навигационном оборудовании
(1) РадиовысотомерРадиовысотомер (см. 34-41-00 ) предназначен для точного и непрерывного измерения
истинной высоты полёта от 0 до 2500 футов над поверхностью земли независимо от
атмосферного давления. Радиовысотомер передаёт данные об истинной высоте полёта в
систему электронной индикации кабины экипажа, систему инструментальной посадки и
систему предотвращения столкновений в воздухе и раннего предупреждения приближения.
5.
2.СИСТЕМА МЕТЕОЛОКАЦИИСистема метеолокации выполняет следующие функции:
— радиолокационный обзор воздушного пространства, обнаружение и выдача на индикаторы
опасных метеоусловий (гроза, мощная кучевая облачность, градообразования, зоны
интенсивных осадков, турбулентные зоны);
— обнаружение и выдача на индикацию вертикального профиля метеообразований и
турбулентных зон в метеообразованиях;
— радиолокационный обзор земной поверхности;
— автоматический встроенный контроль на земле и в полёте технического состояния и выдачу
информации об отказах на индикацию.
Состав системы :
− приемопередатчик;
− антенна метеолокатора;
− пульт управления метеолокатором (на центральном пульте).
6.
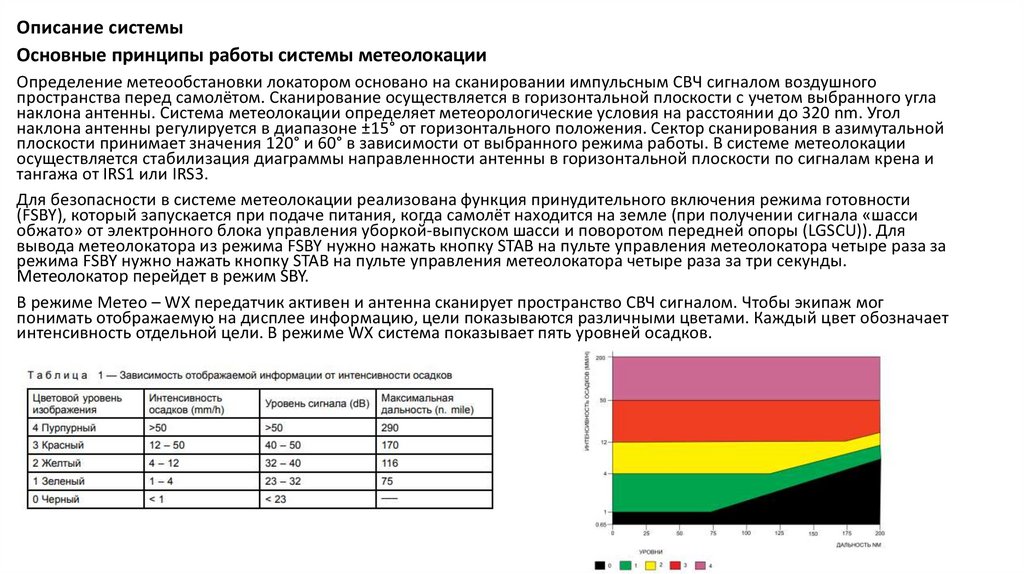
Описание системыОсновные принципы работы системы метеолокации
Определение метеообстановки локатором основано на сканировании импульсным СВЧ сигналом воздушного
пространства перед самолётом. Сканирование осуществляется в горизонтальной плоскости с учетом выбранного угла
наклона антенны. Система метеолокации определяет метеорологические условия на расстоянии до 320 nm. Угол
наклона антенны регулируется в диапазоне ±15° от горизонтального положения. Сектор сканирования в азимутальной
плоскости принимает значения 120° и 60° в зависимости от выбранного режима работы. В системе метеолокации
осуществляется стабилизация диаграммы направленности антенны в горизонтальной плоскости по сигналам крена и
тангажа от IRS1 или IRS3.
Для безопасности в системе метеолокации реализована функция принудительного включения режима готовности
(FSBY), который запускается при подаче питания, когда самолёт находится на земле (при получении сигнала «шасси
обжато» от электронного блока управления уборкой-выпуском шасси и поворотом передней опоры (LGSCU)). Для
вывода метеолокатора из режима FSBY нужно нажать кнопку STAB на пульте управления метеолокатора четыре раза за
режима FSBY нужно нажать кнопку STAB на пульте управления метеолокатора четыре раза за три секунды.
Метеолокатор перейдет в режим SBY.
В режиме Метео – WX передатчик активен и антенна сканирует пространство СВЧ сигналом. Чтобы экипаж мог
понимать отображаемую на дисплее информацию, цели показываются различными цветами. Каждый цвет обозначает
интенсивность отдельной цели. В режиме WX система показывает пять уровней осадков.
7.
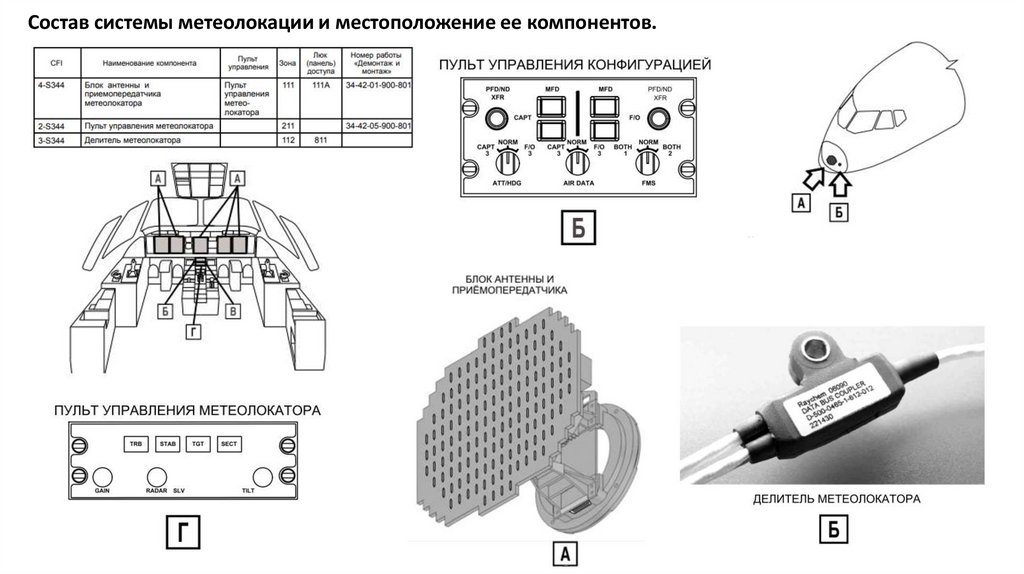
Состав системы метеолокации и местоположение ее компонентов.8.
Описание основных компонентовБлок антенны и приёмопередатчика
Блок антенны и приёмопередатчика (RTA) представляет собой единый блок, в который входят приёмник, передатчик, атенна и
поворотный механизм. Передатчик, приёмник и антенна метеолокатора составляют один блок, называемый RTA. Блок RTA
содержит все цепи, необходимые для передачи, приёма, обработки отражённого сигнала и последовательных данных,
управляющего интерфейса связи с другими компонентами системы и системой электронной индикации. Кроме того, блок RTA
содержит механизм позиционирования и управления антенной. Узлы передатчика и приёмника устанавливаются с задней
стороны антенны. Остальные схемы содержатся в электронном блоке, образующем основание RTA. Блок RTA монтируется на
самолёте на передней переборке (гермоперегородке) воздушного судна. Блок защищен носовым обтекателем самолёта. На
блоке RTA имеются выключатели передатчика и сканирования антенны. Они используются, в основном, для выявления
неисправностей. При управлении углом наклона антенны и сканировании метеолокатор использует сигналы тангажа и крена для
стабилизации антенны. Кроме того, для системы метеолокации требуются данные по воздушной скорости и высоте для
выполнения функций автоматического выбора наклона антенны. Эти данные поступают с вычислителя воздушных сигналов 1.
Пульт управления метеолокатора
Пульт управления метеолокатором устанавливается на центральном пульте для обеспечения выбора режимов работы
метеолокатора и выполнения функции управления наклоном антенны и усилением.
Делитель метеолокатора
Устанавливается на кабельном жгуте локатора для подключения выхода RTA (ARINC708) к входам обоих навигационных дисплеев
через центральный вычислитель DCA.
9.
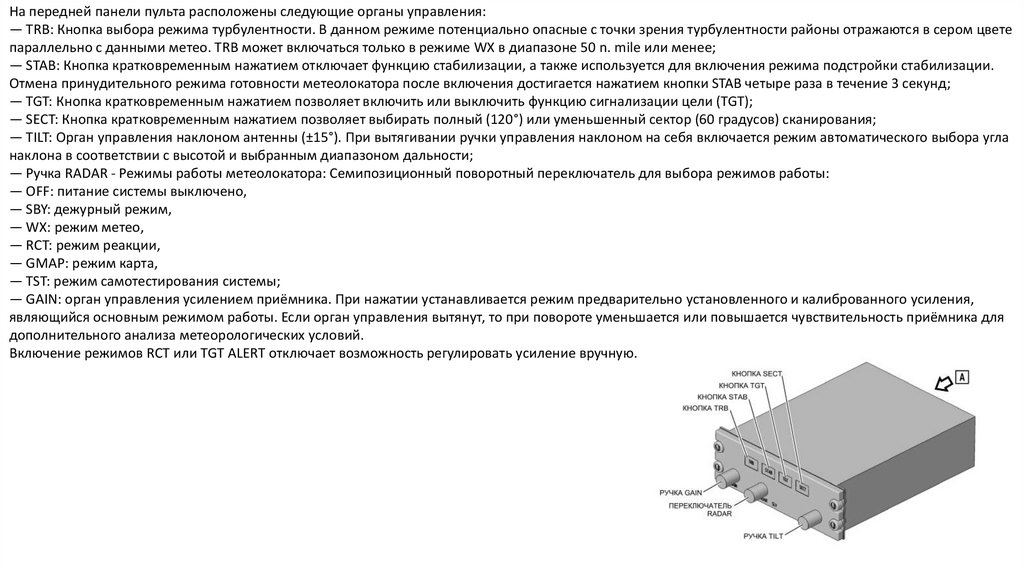
На передней панели пульта расположены следующие органы управления:— TRB: Кнопка выбора режима турбулентности. В данном режиме потенциально опасные с точки зрения турбулентности районы отражаются в сером цвете
параллельно с данными метео. TRB может включаться только в режиме WX в диапазоне 50 n. mile или менее;
— STAB: Кнопка кратковременным нажатием отключает функцию стабилизации, а также используется для включения режима подстройки стабилизации.
Отмена принудительного режима готовности метеолокатора после включения достигается нажатием кнопки STAB четыре раза в течение 3 секунд;
— TGT: Кнопка кратковременным нажатием позволяет включить или выключить функцию сигнализации цели (TGT);
— SECT: Кнопка кратковременным нажатием позволяет выбирать полный (120°) или уменьшенный сектор (60 градусов) сканирования;
— TILT: Орган управления наклоном антенны (±15°). При вытягивании ручки управления наклоном на себя включается режим автоматического выбора угла
наклона в соответствии с высотой и выбранным диапазоном дальности;
— Ручка RADAR - Режимы работы метеолокатора: Семипозиционный поворотный переключатель для выбора режимов работы:
— OFF: питание системы выключено,
— SBY: дежурный режим,
— WX: режим метео,
— RCT: режим реакции,
— GMAP: режим карта,
— TST: режим самотестирования системы;
— GAIN: орган управления усилением приёмника. При нажатии устанавливается режим предварительно установленного и калиброванного усиления,
являющийся основным режимом работы. Если орган управления вытянут, то при повороте уменьшается или повышается чувствительность приёмника для
дополнительного анализа метеорологических условий.
Включение режимов RCT или TGT ALERT отключает возможность регулировать усиление вручную.
10.
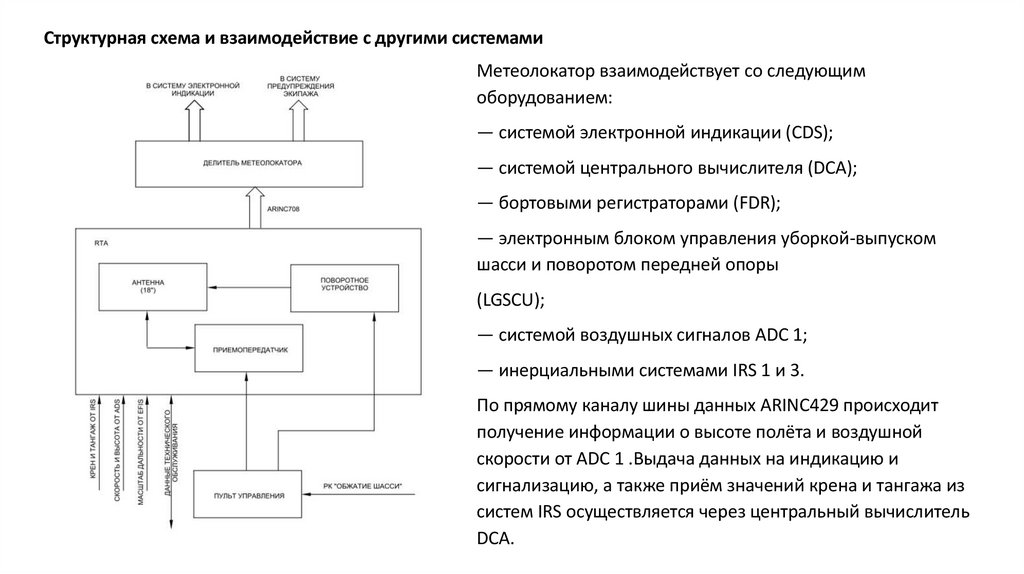
Структурная схема и взаимодействие с другими системамиМетеолокатор взаимодействует со следующим
оборудованием:
— системой электронной индикации (CDS);
— системой центрального вычислителя (DCA);
— бортовыми регистраторами (FDR);
— электронным блоком управления уборкой-выпуском
шасси и поворотом передней опоры
(LGSCU);
— системой воздушных сигналов ADС 1;
— инерциальными системами IRS 1 и 3.
По прямому каналу шины данных ARINC429 происходит
получение информации о высоте полёта и воздушной
скорости от ADC 1 .Выдача данных на индикацию и
сигнализацию, а также приём значений крена и тангажа из
систем IRS осуществляется через центральный вычислитель
DCA.
11.
Режимы работы метеолокатора.Метеолокатор имеет следующие режимы работы:
— режим теста – TST: метеолокатор производит самодиагностику, отображая при этом определенную информацию на навигационных индикаторах.
— режим приведения в готовность – SBY: антенна переводится в верхнее положение, не сканируя и не излучая;
— режим метео – WX: передатчик работает в передающем режиме, и антенна сканирует. На экране навигационного дисплея отображается информация.
— режим реакции – RCT: приёмник радара автоматически регулирует настройку усиления для компенсации потерь на затухание при прохождении луча
радара через промежуточные метеообразования.
— режим карты – GMAP: при включении этого режима наклон антенны TILT регулируется вниз до тех пор, пока не показывается необходимый объем
территории. Степень наклона вниз зависит от высоты самолёта и выбранного уровня усиления. При правильной настройке усиления GAIN можно получить
необходимое отображение местности
— При работе системы в режиме метео можно воспользоваться функцией оповещения об опасном метеообразовании (TARGET ALERT). Данная функция
сформирует оповещение при обнаружении метеообразования уровня 3 или 4 (красного или пурпурного цвета) в пределах ±7.5° пространства впереди
самолёта, находящиеся за пределами установленной шкалы дальности.
— При выборе режима обнаружения турбулентности метеолокатор осуществляет анализ отражённых сигналов для определения признаков
турбулентности. Области потенциально опасной турбулентности показываются белым цветом. Большая мощность метеолокатора позволяет выявлять
области потенциально опасной турбулентности, которые в иных случаях определяются как зоны слабых осадков. Необходимо избегать всех зон
турбулентности.
12.
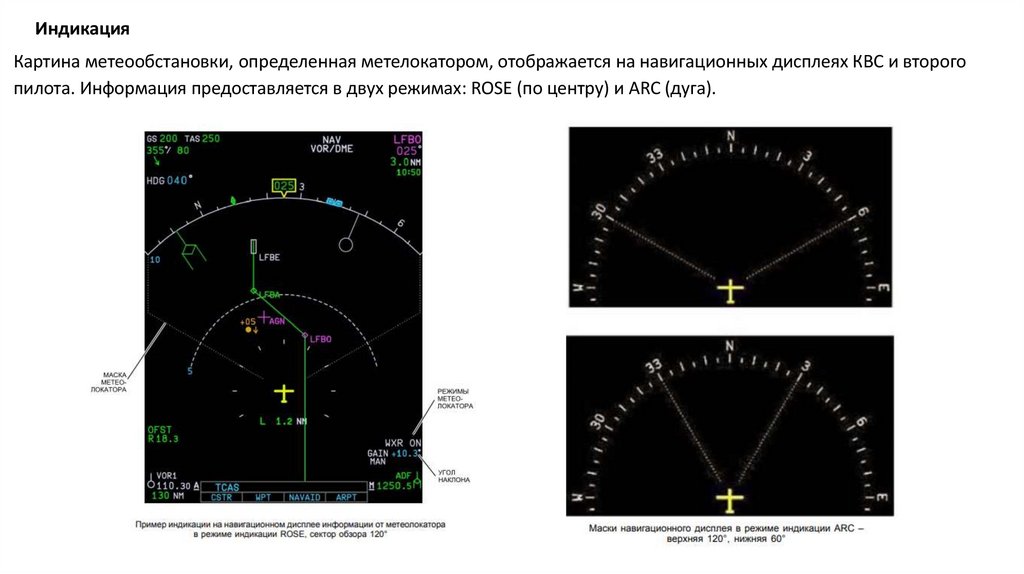
ИндикацияКартина метеообстановки, определенная метелокатором, отображается на навигационных дисплеях КВС и второго
пилота. Информация предоставляется в двух режимах: ROSE (по центру) и ARC (дуга).
13.
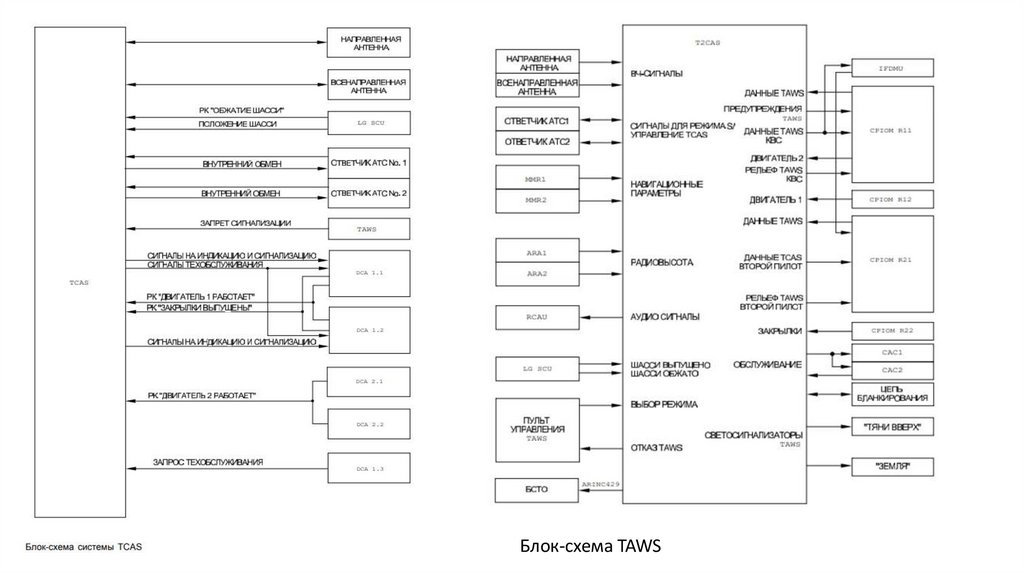
3.СИСТЕМА ПРЕДОТВРАЩЕНИЯ СТОЛКНОВЕНИЙ В ВОЗДУХЕ И РАННЕГО ПРЕДУПРЕЖДЕНИЯ ПРИБЛИЖЕНИЯ К ЗЕМЛЕСистема предотвращения столкновений в воздухе и раннего предупреждения приближения к земле T2CAS
является готовым изделием, включающим в свой состав аппаратуру системы предотвращения столкновения с
наземными препятствиями (TAWS) и оборудование системы TCAS
TCAS осуществляет мониторинг траектории самолётов с целью определения наличия потенциальной опасности
столкновения. Если TCAS определяет опасность столкновения с другим самолётом, то система выдаёт на индикацию и
в систему звукового оповещения рекомендацию для пилота по избежанию столкновения (TA). Система обеспечивает
выдачу команд (RA) для оптимального маневра при уходе от столкновений.
Функция TAWS системы T2CAS обеспечивает прогнозирование потенциальной опасности столкновения с землей и
сигнализацию (режим CPA) и базовые (реактивные) режимы работы системы предупреждения о сближении с землей
(режимы GPWS).
14.
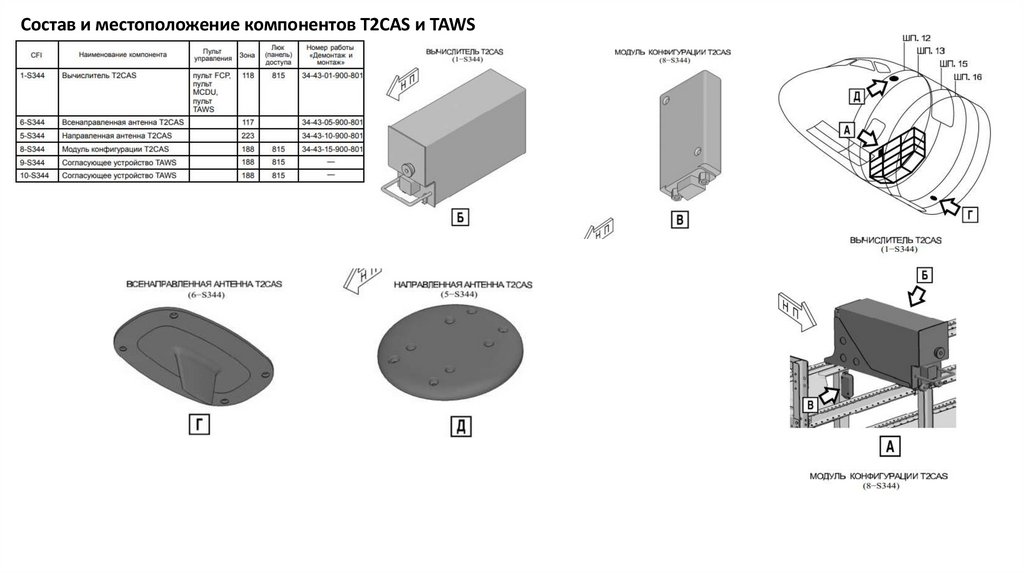
Состав и местоположение компонентов T2CAS и TAWS15.
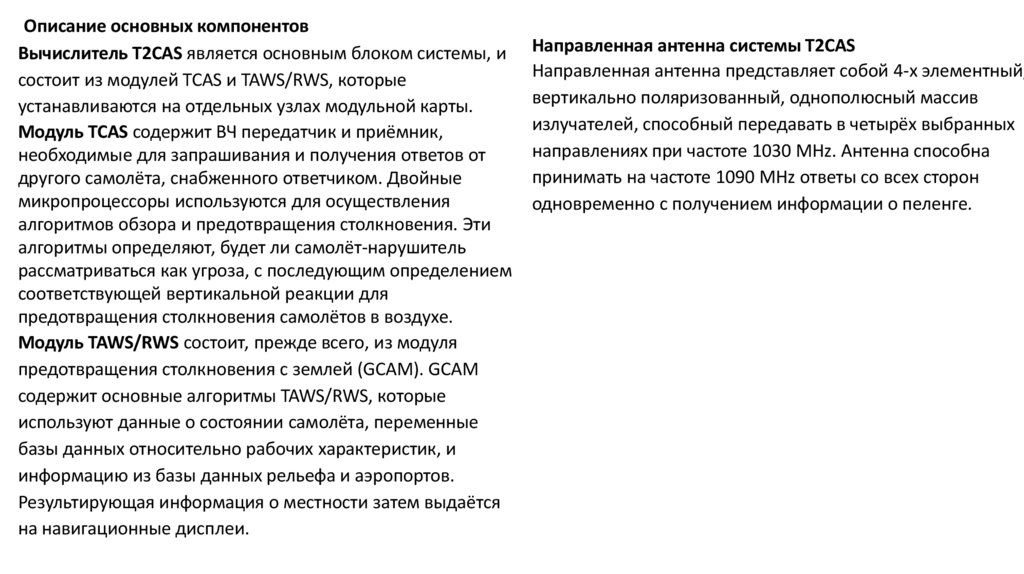
Описание основных компонентовВычислитель T2CAS является основным блоком системы, и
состоит из модулей TCAS и TAWS/RWS, которые
устанавливаются на отдельных узлах модульной карты.
Модуль TCAS содержит ВЧ передатчик и приёмник,
необходимые для запрашивания и получения ответов от
другого самолёта, снабженного ответчиком. Двойные
микропроцессоры используются для осуществления
алгоритмов обзора и предотвращения столкновения. Эти
алгоритмы определяют, будет ли самолёт-нарушитель
рассматриваться как угроза, с последующим определением
соответствующей вертикальной реакции для
предотвращения столкновения самолётов в воздухе.
Модуль TAWS/RWS состоит, прежде всего, из модуля
предотвращения столкновения с землей (GCAM). GCAM
содержит основные алгоритмы TAWS/RWS, которые
используют данные о состоянии самолёта, переменные
базы данных относительно рабочих характеристик, и
информацию из базы данных рельефа и аэропортов.
Результирующая информация о местности затем выдаётся
на навигационные дисплеи.
Направленная антенна системы T2CAS
Направленная антенна представляет собой 4-х элементный,
вертикально поляризованный, однополюсный массив
излучателей, способный передавать в четырёх выбранных
направлениях при частоте 1030 MHz. Антенна способна
принимать на частоте 1090 MHz ответы со всех сторон
одновременно с получением информации о пеленге.
16.
Основные принципы работы системы TCASОсновной задачей TCAS является помощь экипажу в поиске «самолётов-нарушителей» и разделении их на 3 группы, в зависимости от степени опасности:
— неопасные самолёты, высота полёта которых отличается от высоты данного самолёта более, чем на 1200 ft, или расстояние до них больше чем 6 n.
mile,
— близкие самолёты, находящиеся в пределах 1200 ft по вертикали, или в пределах 6 n. Mile по горизонтали от собственного самолёта,
— угрожающие самолёты, находящиеся в зоне возможного столкновения.
Определение опасности сближения с воздушными судами осуществляется путем опрашивания ответчиков режима A, режима C и режима S
потенциально угрожающих самолётов и отслеживания их ответов с последующим предоставлением рекомендаций экипажу для обеспечения
вертикального эшелонирования.
Существует два уровня рекомендаций:
— TA (traffic advisories): консультационная информация о воздушном пространстве. Отображается расстояние, пеленг и относительная высота самолётанарушителя для оказания помощи при визуальном поиске нарушителя;
— RA (Resolution advisories): рекомендации по принятию решения, указывающие вертикальный манёвр, который необходимо выполнить, или который
необходимо предотвратить для обеспечения безопасного эшелонирования. При этом формируется визуальное и звуковое оповещение.
Если система обнаруживает, что существует опасность столкновения, она выдаёт рекомендации по выполнению манёвра в вертикальной плоскости.
Нарушитель, который не снабжен ответчиком TCAS, является невидимым для TCAS. Связь с системами TCAS других воздушных судов, обеспечивается
бортовыми системами активного ответа (ответчиками) режима S.
Система TCAS способна отслеживать до 50 воздушных судов, находящихся в опасной зоне. Навигационные дисплеи способны отображать до 31-го
самолёта.
17.
Основные принципы работы системы TAWSСистема TAWS служит для предотвращения столкновения с земной поверхностью.
При определении условий срабатывания сигнализаций TAWS использует следующую информацию:
— вертикальную скорость,
— скорость относительно земли,
— угол наклона траектории,
— текущую широту и долготу,
— положение механизации,
— положение шасси,
— угол крена,
— барометрическую и радиовысоту,
— GPS-высоту,
— информацию из базы данных рельефа местности и аэропортов.
База данных рельефа местности и аэропортов разрабатывается разработчиком системы T2CAS и соответствует документу DO-200A. База данных рельефа
местности хранится в энергонезависимой памяти блока T2CAS и содержит информацию о высотах рельефа местности и данные взлётно-посадочных полос
по всему земному шару в системе WGS-84. Шаг сетки рельефа составляет 3 n. mile и уменьшается до 0.5 n. mile. в зоне аэропорта. Для аэропортов в
гористой местности шаг сетки составляет 0.25 n. mile.
18.
В зависимости от положения самолёта по отношению к земле TAWS формирует следующие сигналы опасности:— опасность приближения земли при полёте на малой высоте;
— опасное кабрирование;
— опасность столкновения с землей.
Функция TAWS системы T2CAS включает в себя следующие режимы и функции:
— режим прогнозирования и сигнализации об опасности столкновения с землёй (режим CPA),
— базовые (реактивные) режимы GPWS,
— функция индикации рельефа местности,
— режим самотестирования.
Режим прогнозирования и сигнализации об опасности столкновения с землёй (режим CPA);
В режиме CPA функция TAWS системы T2CAS осуществляет формирование предупреждающей и аварийной сигнализации в случае, если текущая
траектория полёта и её продолжение проходит опасно близко к окружающему рельефу. Алгоритм прогнозирования позволяет предупредить экипаж о
надвигающейся угрозе столкновения заранее, что в свою очередь формирует запас времени достаточный для оценки ситуации и выполнения
безопасного манёвра ухода от столкновения. Данный режим расширяет возможности базовых режимов GPWS и существенно повышает безопасность
полётов в условиях сложного рельефа местности.
19.
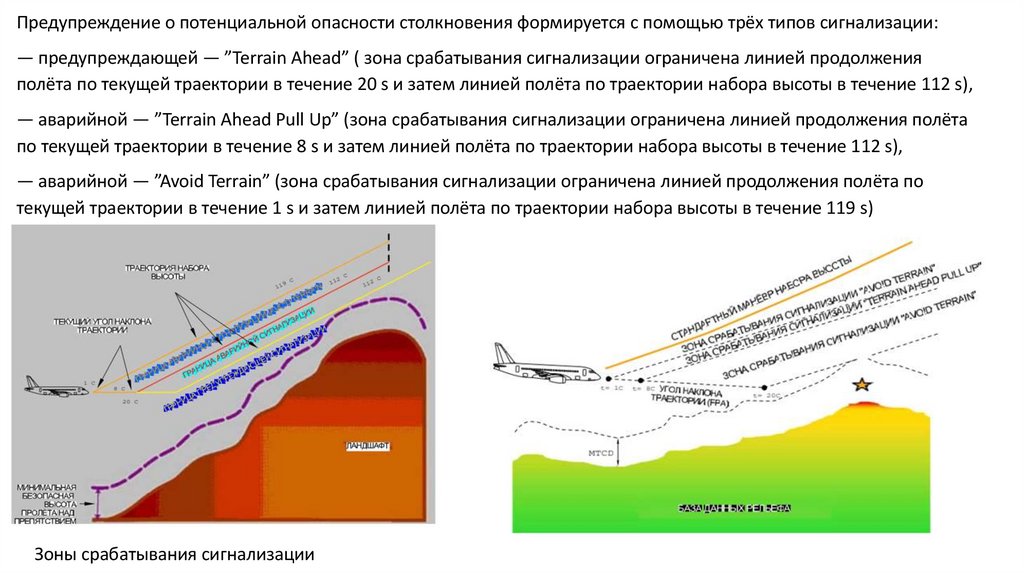
Предупреждение о потенциальной опасности столкновения формируется с помощью трёх типов сигнализации:— предупреждающей — ”Terrain Ahead” ( зона срабатывания сигнализации ограничена линией продолжения
полёта по текущей траектории в течение 20 s и затем линией полёта по траектории набора высоты в течение 112 s),
— аварийной — ”Terrain Ahead Pull Up” (зона срабатывания сигнализации ограничена линией продолжения полёта
по текущей траектории в течение 8 s и затем линией полёта по траектории набора высоты в течение 112 s),
— аварийной — ”Avoid Terrain” (зона срабатывания сигнализации ограничена линией продолжения полёта по
текущей траектории в течение 1 s и затем линией полёта по траектории набора высоты в течение 119 s)
Зоны срабатывания сигнализации
20.
Базовые (реактивные) режимы GPWSВ отличие от режима CPA, которые активны в течение всего полёта, реактивные режимы включаются только на
определённых фазах полёта и вызывают срабатывание сигнализации в момент возникновения заданных условий
Перечень реактивных режимов, реализованных в функции TAWS:
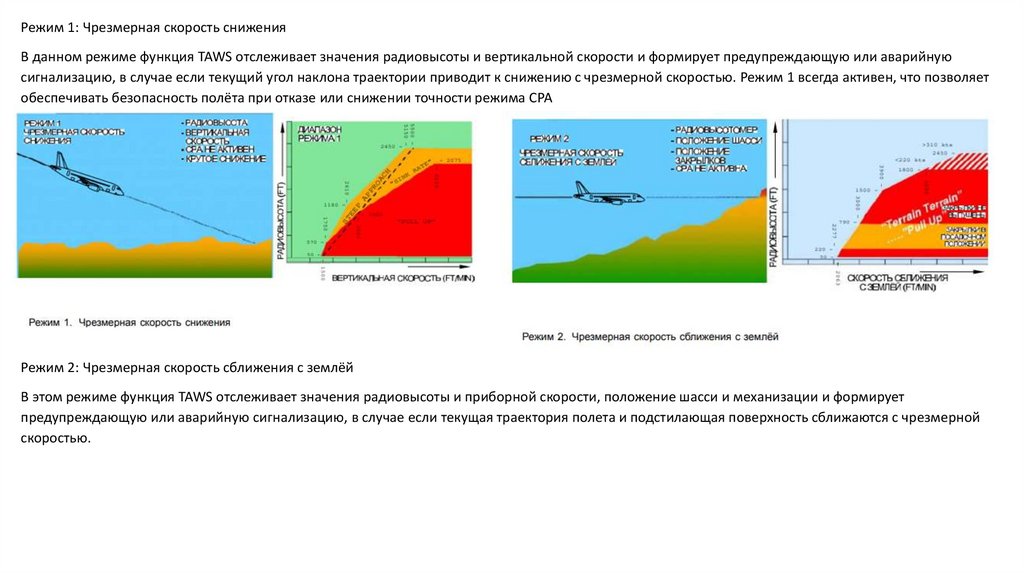
— Режим 1: Чрезмерная скорость снижения.
— Режим 2: Чрезмерная скорость сближения с землёй.
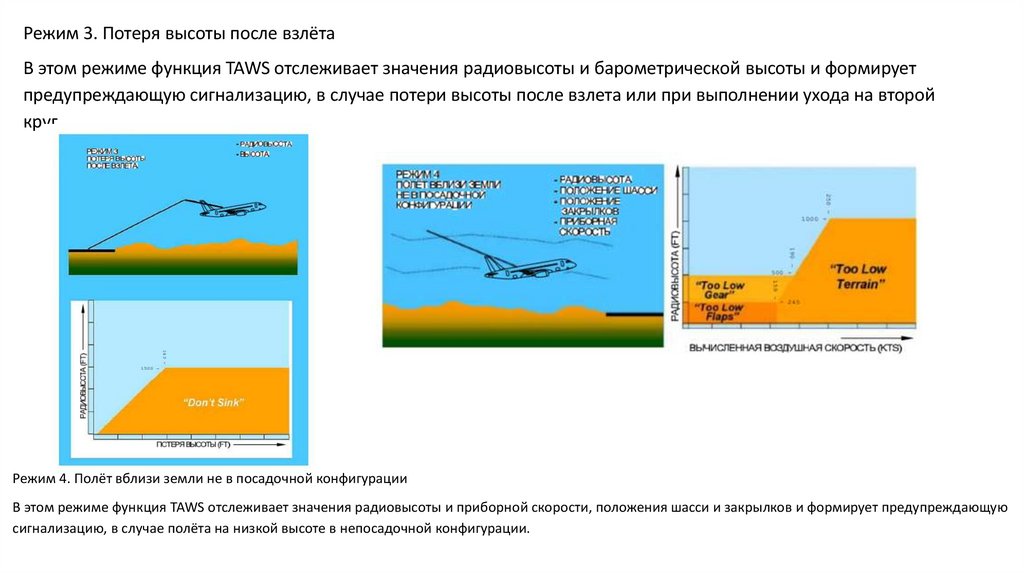
— Режим 3: Потеря высоты после взлёта.
— Режим 4: Полёт вблизи земли не в посадочной конфигурации.
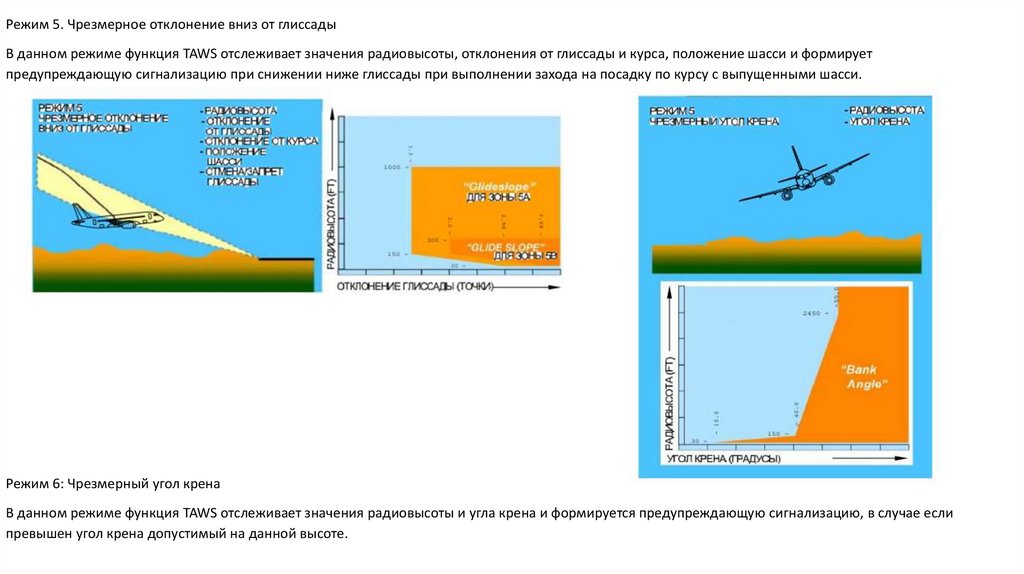
— Режим 5: Чрезмерное отклонение вниз от глиссады.
— Чрезмерный угол крена.
— Сигнализация прохода высот при заходе на посадку.
21.
Режим 1: Чрезмерная скорость сниженияВ данном режиме функция TAWS отслеживает значения радиовысоты и вертикальной скорости и формирует предупреждающую или аварийную
сигнализацию, в случае если текущий угол наклона траектории приводит к снижению с чрезмерной скоростью. Режим 1 всегда активен, что позволяет
обеспечивать безопасность полёта при отказе или снижении точности режима CPA
Режим 2: Чрезмерная скорость сближения с землёй
В этом режиме функция TAWS отслеживает значения радиовысоты и приборной скорости, положение шасси и механизации и формирует
предупреждающую или аварийную сигнализацию, в случае если текущая траектория полета и подстилающая поверхность сближаются с чрезмерной
скоростью.
22.
Режим 3. Потеря высоты после взлётаВ этом режиме функция TAWS отслеживает значения радиовысоты и барометрической высоты и формирует
предупреждающую сигнализацию, в случае потери высоты после взлета или при выполнении ухода на второй
круг.
Режим 4. Полёт вблизи земли не в посадочной конфигурации
В этом режиме функция TAWS отслеживает значения радиовысоты и приборной скорости, положения шасси и закрылков и формирует предупреждающую
сигнализацию, в случае полёта на низкой высоте в непосадочной конфигурации.
23.
Режим 5. Чрезмерное отклонение вниз от глиссадыВ данном режиме функция TAWS отслеживает значения радиовысоты, отклонения от глиссады и курса, положение шасси и формирует
предупреждающую сигнализацию при снижении ниже глиссады при выполнении захода на посадку по курсу с выпущенными шасси.
Режим 6: Чрезмерный угол крена
В данном режиме функция TAWS отслеживает значения радиовысоты и угла крена и формируется предупреждающую сигнализацию, в случае если
превышен угол крена допустимый на данной высоте.
24.
Перечень речевых сообщений, звуковой и визуальной сигнализации функции TAWS25.
Блок-схема TAWS26.
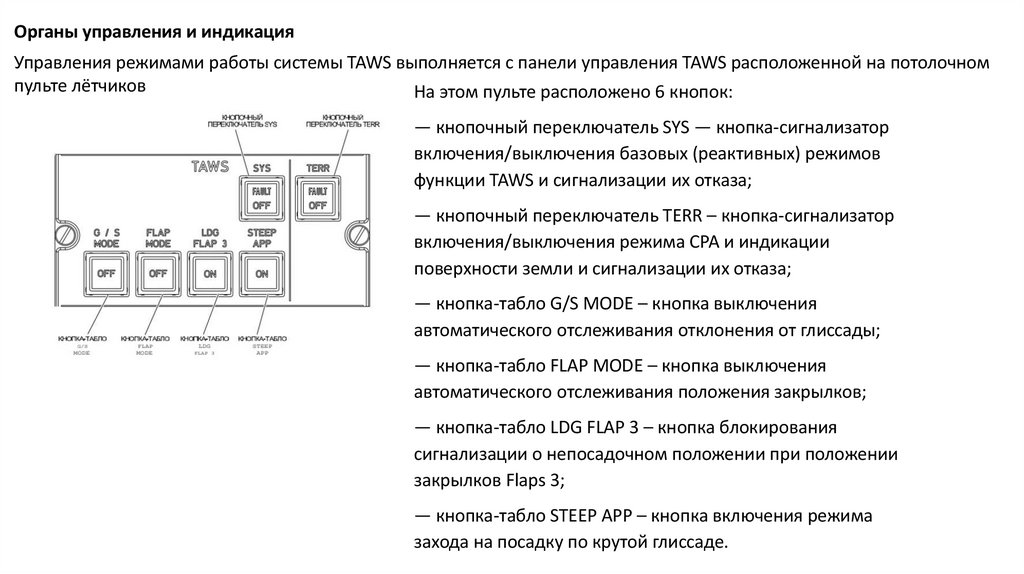
Органы управления и индикацияУправления режимами работы системы TAWS выполняется с панели управления TAWS расположенной на потолочном
пульте лётчиков
На этом пульте расположено 6 кнопок:
— кнопочный переключатель SYS — кнопка-сигнализатор
включения/выключения базовых (реактивных) режимов
функции TAWS и сигнализации их отказа;
— кнопочный переключатель TERR – кнопка-сигнализатор
включения/выключения режима CPA и индикации
поверхности земли и сигнализации их отказа;
— кнопка-табло G/S MODE – кнопка выключения
автоматического отслеживания отклонения от глиссады;
— кнопка-табло FLAP MODE – кнопка выключения
автоматического отслеживания положения закрылков;
— кнопка-табло LDG FLAP 3 – кнопка блокирования
сигнализации о непосадочном положении при положении
закрылков Flaps 3;
— кнопка-табло STEEP APP – кнопка включения режима
захода на посадку по крутой глиссаде.
27.
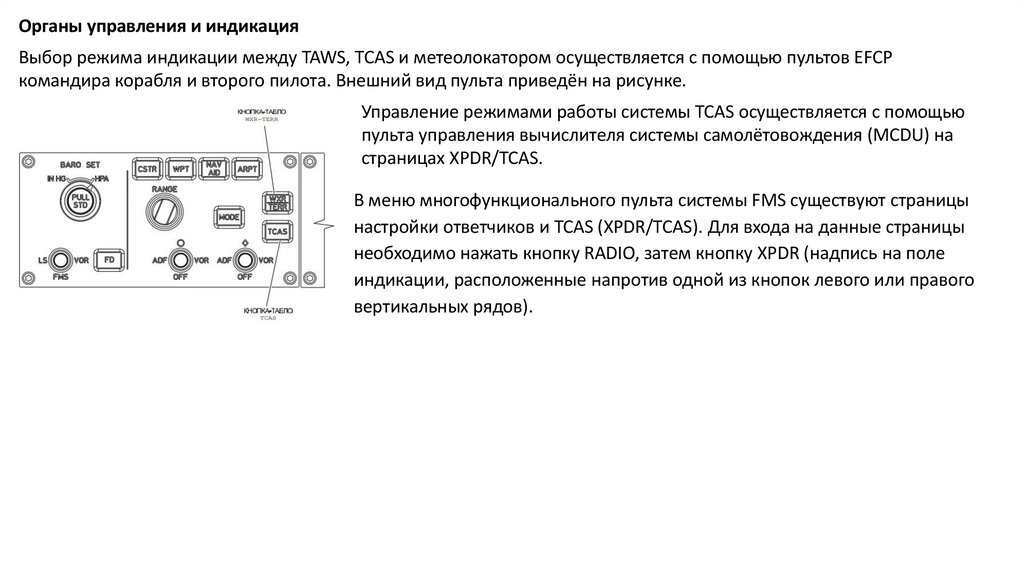
Органы управления и индикацияВыбор режима индикации между TAWS, TCAS и метеолокатором осуществляется с помощью пультов EFCP
командира корабля и второго пилота. Внешний вид пульта приведён на рисунке.
Управление режимами работы системы TCAS осуществляется с помощью
пульта управления вычислителя системы самолётовождения (MCDU) на
страницах XPDR/TCAS.
В меню многофункционального пульта системы FMS существуют страницы
настройки ответчиков и TCAS (XPDR/TCAS). Для входа на данные страницы
необходимо нажать кнопку RADIO, затем кнопку XPDR (надпись на поле
индикации, расположенные напротив одной из кнопок левого или правого
вертикальных рядов).
28.
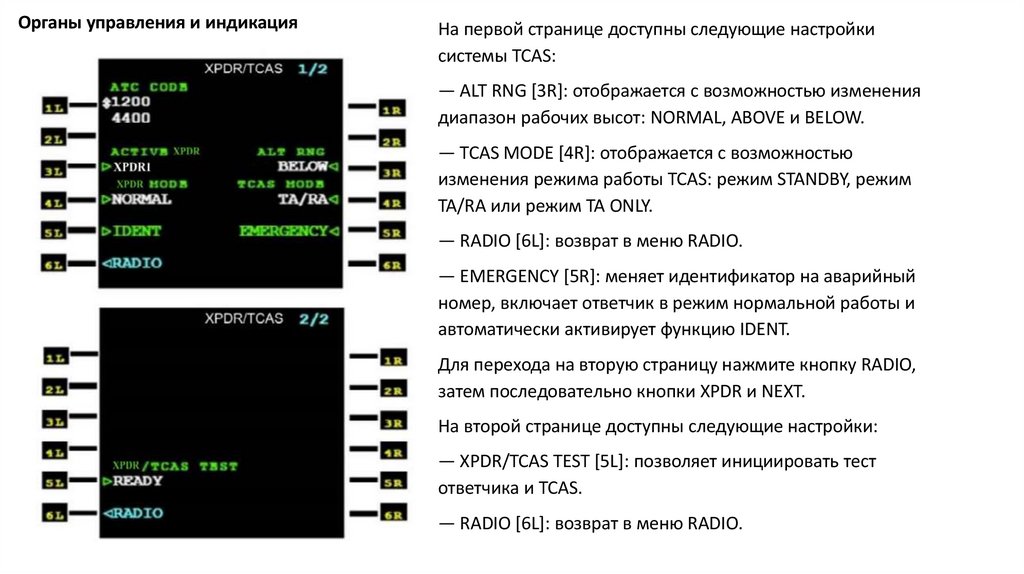
Органы управления и индикацияНа первой странице доступны следующие настройки
системы TCAS:
— ALT RNG [3R]: отображается с возможностью изменения
диапазон рабочих высот: NORMAL, ABOVE и BELOW.
— TCAS MODE [4R]: отображается с возможностью
изменения режима работы TCAS: режим STANDBY, режим
TA/RA или режим TA ONLY.
— RADIO [6L]: возврат в меню RADIO.
— EMERGENCY [5R]: меняет идентификатор на аварийный
номер, включает ответчик в режим нормальной работы и
автоматически активирует функцию IDENT.
Для перехода на вторую страницу нажмите кнопку RADIO,
затем последовательно кнопки XPDR и NEXT.
На второй странице доступны следующие настройки:
— XPDR/TCAS TEST [5L]: позволяет инициировать тест
ответчика и TCAS.
— RADIO [6L]: возврат в меню RADIO.
29.
30.
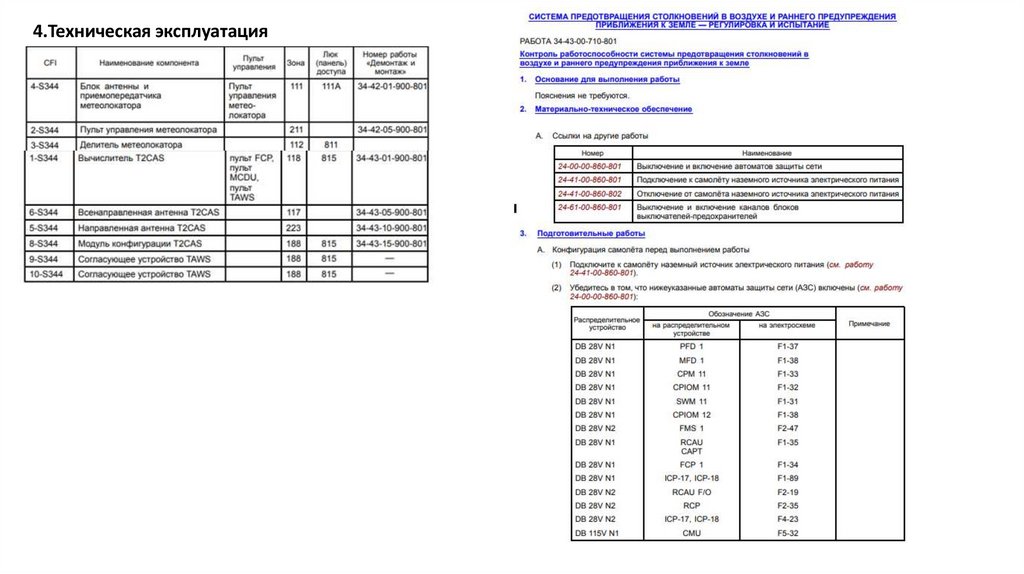
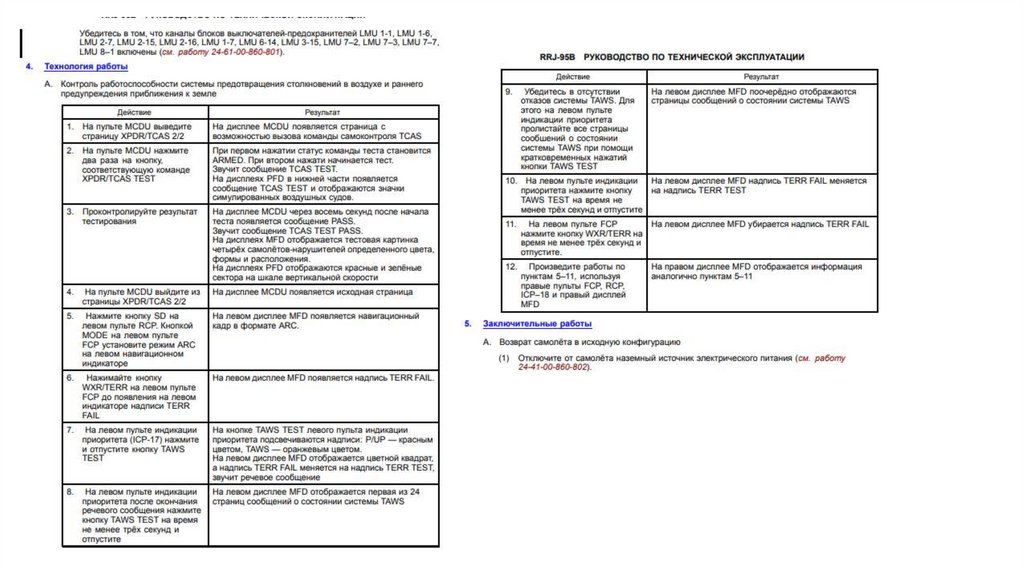
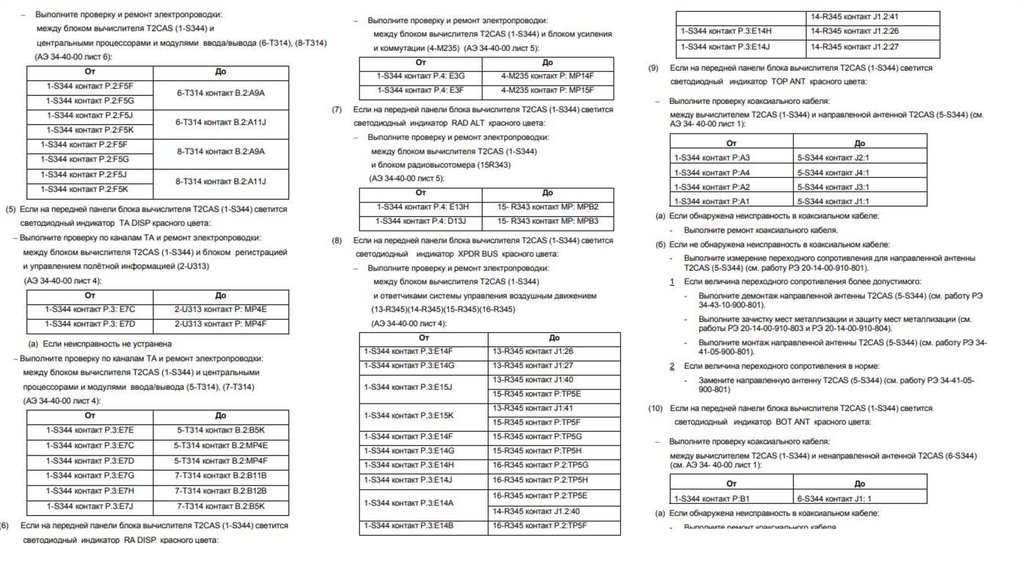
4.Техническая эксплуатация31.
32.
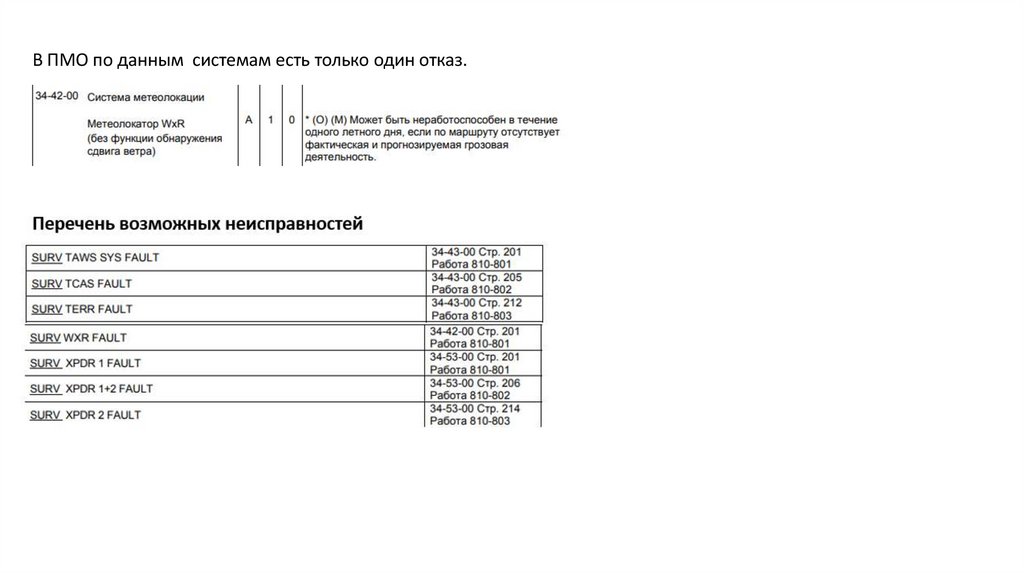
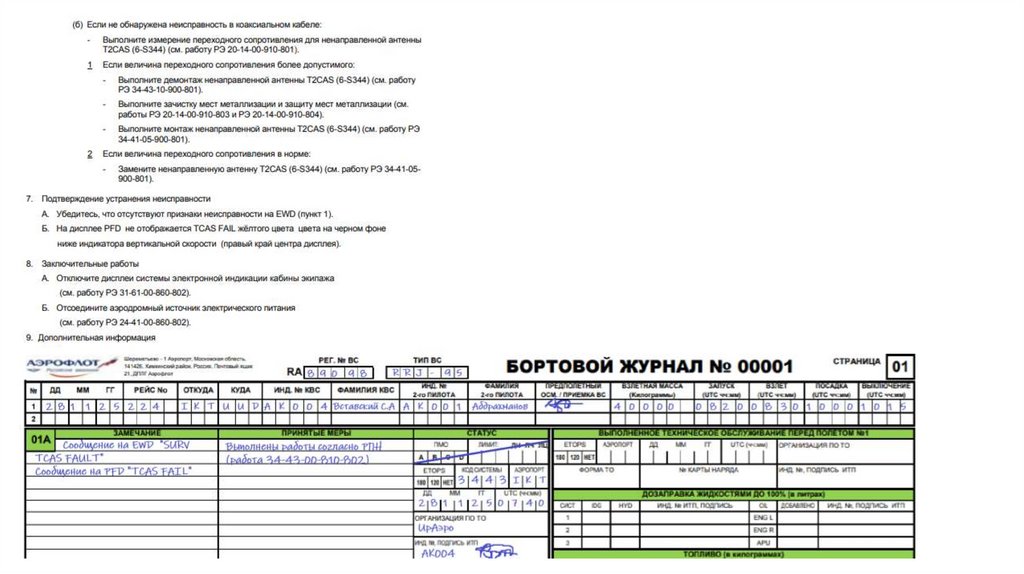
В ПМО по данным системам есть только один отказ.33.
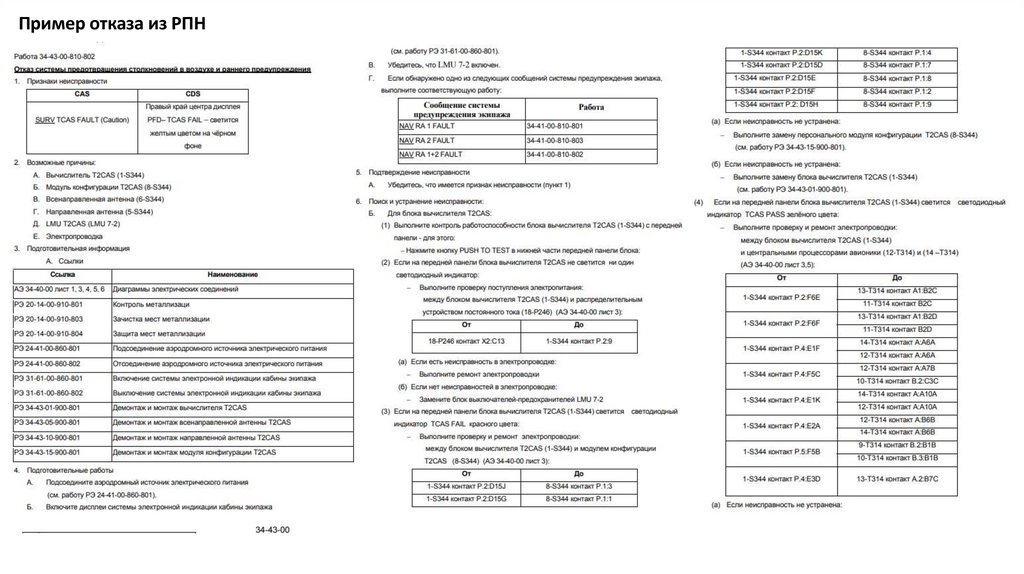
Пример отказа из РПН34.
35.
36.
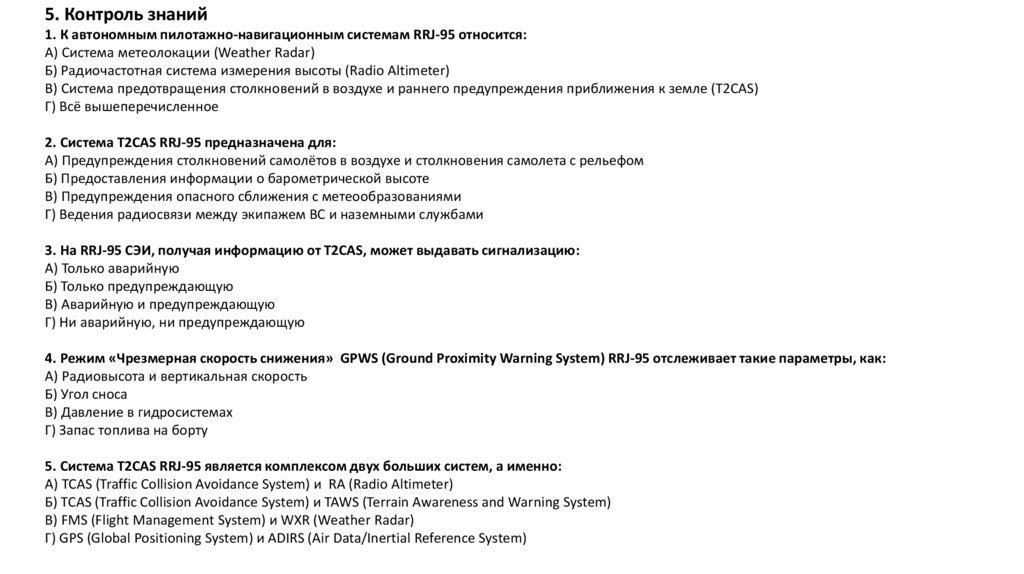
5. Контроль знаний1. К автономным пилотажно-навигационным системам RRJ-95 относится:
А) Система метеолокации (Weather Radar)
Б) Радиочастотная система измерения высоты (Radio Altimeter)
В) Система предотвращения столкновений в воздухе и раннего предупреждения приближения к земле (T2CAS)
Г) Всё вышеперечисленное
2. Система T2CAS RRJ-95 предназначена для:
А) Предупреждения столкновений самолётов в воздухе и столкновения самолета с рельефом
Б) Предоставления информации о барометрической высоте
В) Предупреждения опасного сближения с метеообразованиями
Г) Ведения радиосвязи между экипажем ВС и наземными службами
3. На RRJ-95 СЭИ, получая информацию от T2CAS, может выдавать сигнализацию:
А) Только аварийную
Б) Только предупреждающую
В) Аварийную и предупреждающую
Г) Ни аварийную, ни предупреждающую
4. Режим «Чрезмерная скорость снижения» GPWS (Ground Proximity Warning System) RRJ-95 отслеживает такие параметры, как:
А) Радиовысота и вертикальная скорость
Б) Угол сноса
В) Давление в гидросистемах
Г) Запас топлива на борту
5. Система T2CAS RRJ-95 является комплексом двух больших систем, а именно:
А) TCAS (Traffic Collision Avoidance System) и RA (Radio Altimeter)
Б) TCAS (Traffic Collision Avoidance System) и TAWS (Terrain Awareness and Warning System)
В) FMS (Flight Management System) и WXR (Weather Radar)
Г) GPS (Global Positioning System) и ADIRS (Air Data/Inertial Reference System)
37.
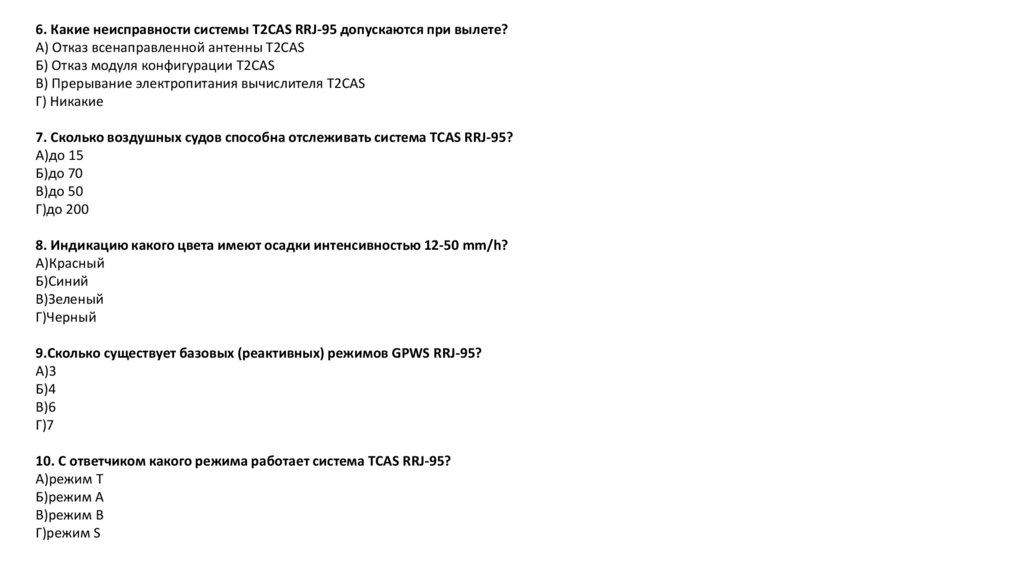
6. Какие неисправности системы T2CAS RRJ-95 допускаются при вылете?А) Отказ всенаправленной антенны T2CAS
Б) Отказ модуля конфигурации T2CAS
В) Прерывание электропитания вычислителя T2CAS
Г) Никакие
7. Сколько воздушных судов способна отслеживать система TCAS RRJ-95?
A)до 15
Б)до 70
В)до 50
Г)до 200
8. Индикацию какого цвета имеют осадки интенсивностью 12-50 mm/h?
А)Красный
Б)Синий
В)Зеленый
Г)Черный
9.Сколько существует базовых (реактивных) режимов GPWS RRJ-95?
А)3
Б)4
В)6
Г)7
10. С ответчиком какого режима работает система TCAS RRJ-95?
А)режим T
Б)режим А
В)режим B
Г)режим S