






































 software
software electronics
electronicsSimilar presentations:



")






Верификация программного обеспечения
1.
ВЕРИФИКАЦИЯ ПРОГРАММНОГООБЕСПЕЧЕНИЯ
Презентация к курсу лекций
2.
Давайте познакомимся!Патутинский Вячеслав Львович.
Главный специалист отдела общесистемного проектирования КРИС НТЦ ИУС.
3.
Тема 1. Описание БРЭО самолётаСамолёт – это не только крылья, шасси и хвост.
Это ещё и множество бортового радиоэлектронного оборудования,
датчиков, кабелей, вычислительных блоков и программного
обеспечения.
4.
Определение БРЭО самолётаБРЭО (бортовое радиоэлектронное
оборудование) - совокупность
бортовых радиоэлектронных систем,
соединенных цифровыми линиями
связи. Часть этих систем могут
излучать и/или принимать
радиоволны.
В качестве примера рассмотрим БРЭО
самолёта МС-21.
5.
Cодержание1.
2.
3.
4.
5.
6.
7.
Архитектура БРЭО
Структура БРЭО
Системы БРЭО
Принципы построения БРЭО
современных летательных аппаратов
Особенности военных самолётов
Системы, использующие ресурсы
вычислительного ядра ЛА
Распространённые интерфейсы
6.
1. Архитектура БРЭО7.
1. Архитектура БРЭО• БРЭО самолетов семейства МС-21 предназначено для реализации
функций самолета в части обеспечения экипажа информацией,
необходимой для выполнения безопасного полета, предоставления
возможности связи с наземными службами и воздушными судами,
предоставлением навигационной информации экипажу и системам
самолета – потребителям информации, а также для предоставления
таких сервисных функций как электронные планшеты в кабине, принтер,
система видеонаблюдения.
• Архитектура БРЭО построена по принципу обеспечения соответствия
функциональным требованиям к БРЭО, требований пунктов
сертификационного базиса самолета МС-21 в части БРЭО, а также на
основании оценки функциональных опасностей БРЭО.
8.
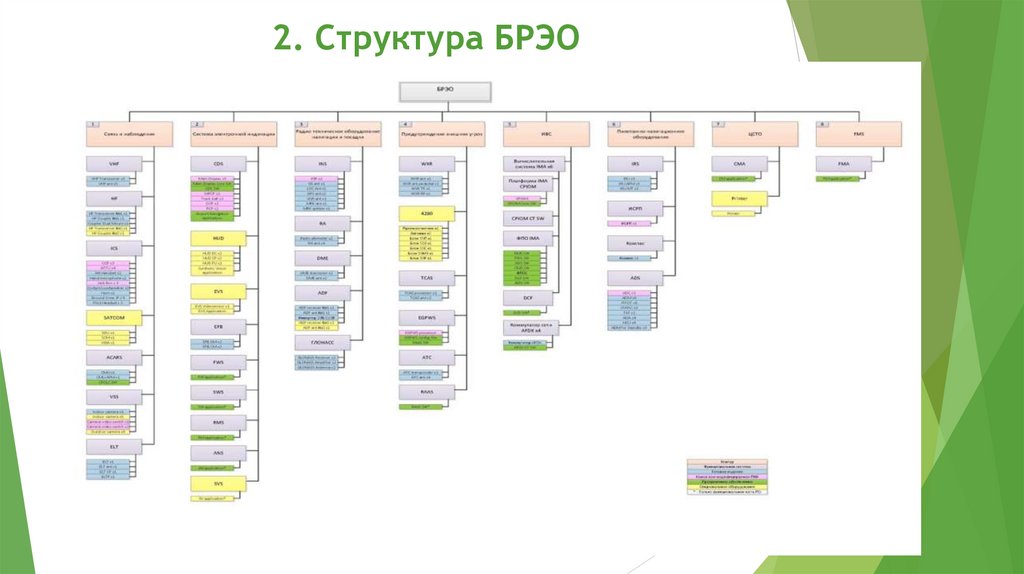
2. Структура БРЭО9.
3. Системы БРЭО:3.1. Связь и наблюдение
3.2. Система электронной индикации
3.3. Радио-техническое оборудование навигации и
посадки
3.4. Предупреждение внешних угроз
3.5. Интегрированная вычислительная система ИВС;
3.6. Пилотажно-навигационное оборудование;
3.7. Система технического обслуживания;
3.8 Система самолётовождения (Flight Management
System, FMS)
10.
3.1. Связь и наблюдение. Связь• обеспечение двухсторонней беспоисковой и бесподстроечной связи в
любой момент времени с наземными и бортовыми авиационными
радиостанциями,
работы в режиме селективного вызова (функция SELCAL) речевой связи в МВ
и ДКМВ диапазонах;
• обеспечение двухсторонней связи между всеми членами лётного экипажа
и оповещение пассажиров в полёте;
• передача сигналов на частотах 121.5 и 406 МГЦ с функцией передачи
координат;
• реализация функции связи в соответствии с концепцией CNS/ATM:
o обмен данными по линии "БОРТ-ЗЕМЛЯ-БОРТ" по каналам авиационной
цифровой связи УКВ диапазон в режимах VDL-2, КВ диапазон в режиме HFDL,
спутниковый канал системы ИНМАРСАТ;
o автоматический обмен информацией «пилот-диспетчер» (CPDLC)
11.
3.1. Связь и наблюдение. Наблюдение• обеспечение видеонаблюдения для пилотов, а также передача
видеоинформации на контрольный разъём для доступа с внешней
стороны самолёта:
- за пространством перед дверью в кабину экипажа от камер
открытой установки;
- за обстановкой в пассажирском салоне и багажном отсеке от
камер открытой установки (опция);
• обеспечение для пилотов видеоконтроля за состоянием
конструкции элементов управления (механизации крыла) и шасси
(опция).
12.
3.1. Связь и наблюдение.Состав:
• Система УКВ связи
• Система КВ связи
• Система внутренней связи
• SATCOM (Система спутниковой связи)
• ACARS (Система обмена цифровыми данными с
наземными службами)
• ELT (Emergency Locator Transmitter, аварийный
радиомаяк):
- Стационарный аварийный радиомаяк
- Переносной аварийный радиомаяк
• Система видеонаблюдения
13.
3.1. Связь и наблюдение. Система УКВ связиБортовая система радиосвязи УКВ диапазона предназначена для
обеспечения беспоисковой и бесподстроечной радиосвязью в симплексном
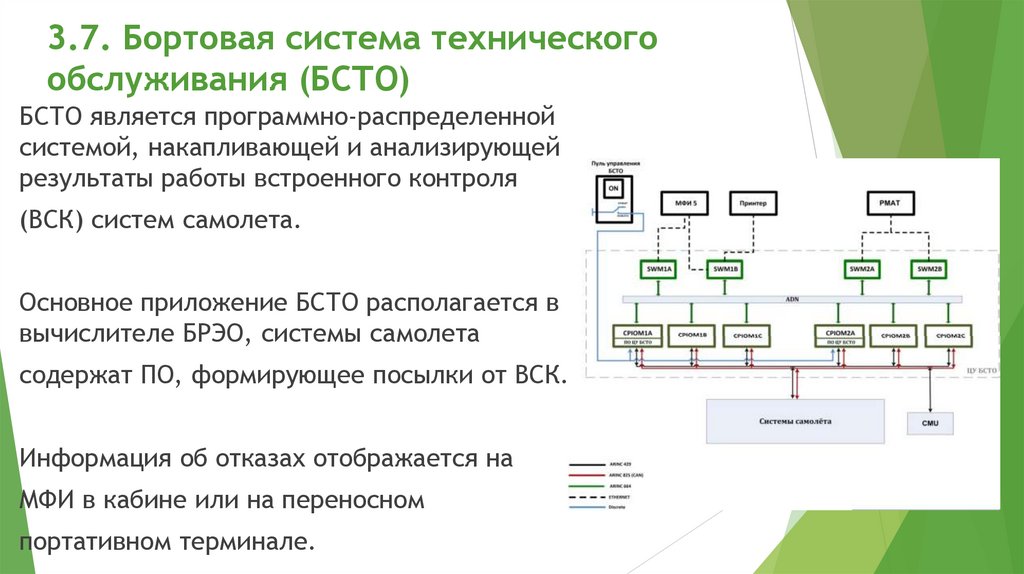
режиме с модуляцией типа A3 экипажей самолётов между собой и с
диспетчерами наземных служб в диапазоне 118 МГц ÷ 137 МГц, а также
передачи данных.
Приемопередатчик VHF-2100 и антенна.
14.
3.1. Связь и наблюдение. Система КВ связиБортовая система радиосвязи КВ диапазона предназначена для
обеспечения беспоисковой и бесподстроечной радиосвязью в симплексном
режиме с модуляцией типа A3 экипажей самолётов между собой и с
диспетчерами наземных служб в диапазоне 2 МГц ÷ 30 МГц, а также
передачи данных.
Приемопередатчик HFS-900D и АСУ CPL-920D.
15.
3.1. Связь и наблюдение. Система внутренней связиСистема внутренней связи.
Система внутренней связи предназначена для
централизованного
управления звуковыми сигналами, переговорами
внутри самолёта и решает
следующие задачи:
• обеспечение внутрисамолётной связью членов
экипажа;
• оповещение лётного состава звуковыми
сигналами;
16.
3.1. Связь и наблюдение. Система внутренней связи• обеспечение внешней двусторонней связью через УКВ/КВ
радиостанции;
• идентификация и отображение сигналов системы Selcal;
• прослушивание сигналов и команд от радионавигационных
систем,
телефонной связи между наземным персоналом на земле;
• обеспечение внешней двусторонней связью через систему
спутниковой связи SATCOM;
• обеспечение выдачи звуковой информации на систему
регистрации.
17.
3.1. Связь и наблюдение. Система обмена даннымиСистема обмена данными ACARS предназначена для формирования
двустороннего цифрового канала связи «борт-земля / земля-борт» между
ВС и наземными службами, посредством КВ/УКВ или спутниковой
адиосвязи.
Блок управления системы
обмена данными
Модуль конфигурации системы
обмена данными
18.
3.1. Связь и наблюдение. Система спутниковой связиСистема спутниковой связи (SATCOM) предназначена для ведения
внешней двусторонней связи через систему спутниковой связи
SATCOM и выполняет классическую голосовую функцию в кабине.
Возможна поддержка функции передачи данных и
широкополосной передачи данных (Swift Broadband).
Приемопередатчик системы
спутниковой связи
Антенна HGA.
19.
3.1. Связь и наблюдение. Стационарныйаварийный радиомаяк
Стационарный аварийный радиомаяк.
Автоматический радиомаяк АРМ-406П предназначен для определения
координат терпящих бедствие воздушных судов (ВС) с помощью передачи
информации через ИСЗ системы КОСПАС-САРСАТ, а также обеспечения
привода поисковых средств к месту аварии.
Состав АРМ406П: антенна АНТ406В,
пульт ПДУ406 и моноблок «П»
20.
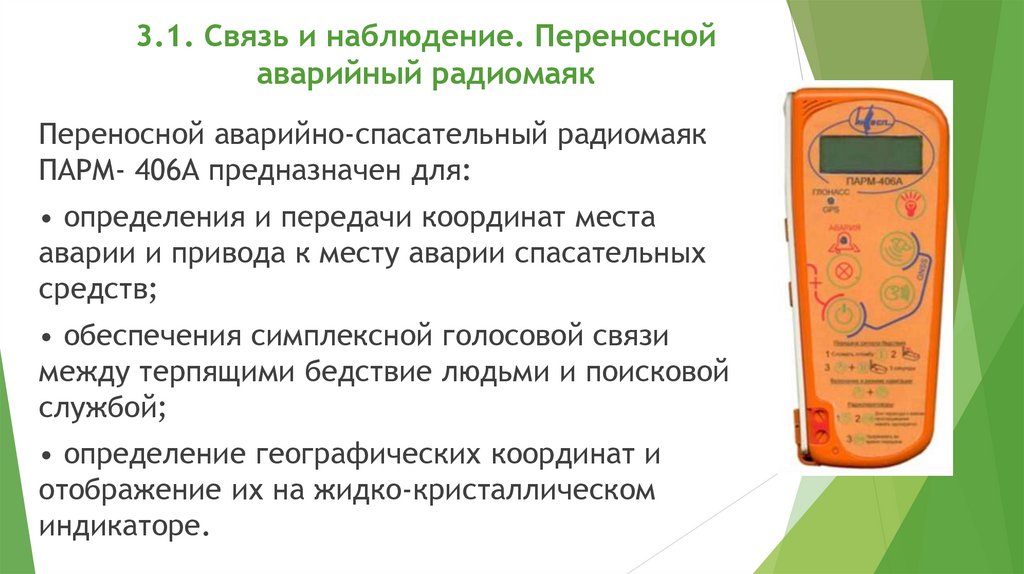
3.1. Связь и наблюдение. Переноснойаварийный радиомаяк
Переносной аварийно-спасательный радиомаяк
ПАРМ- 406А предназначен для:
• определения и передачи координат места
аварии и привода к месту аварии спасательных
средств;
• обеспечения симплексной голосовой связи
между терпящими бедствие людьми и поисковой
службой;
• определение географических координат и
отображение их на жидко-кристаллическом
индикаторе.
21.
3.1. Связь и наблюдение. Переноснойаварийный радиомаяк
Переносной аварийно-спасательный радиомаяк ПАРМ406А состоит из следующих компонентов:
• ГЛОНАСС/GPS приемник с антенной;
• передатчики на аварийной частоте 406,037 МГц и на
частоте привода спасательных средств 121,5 МГц;
• антенна АНТ-АРМ,-02;
• жидко-кристаллический индикатор географических
координат и служебной информации, подсветка;
• переговорное устройство;
• автономный источник питания (батарея и аккумулятор);
• герметичный бокс.
22.
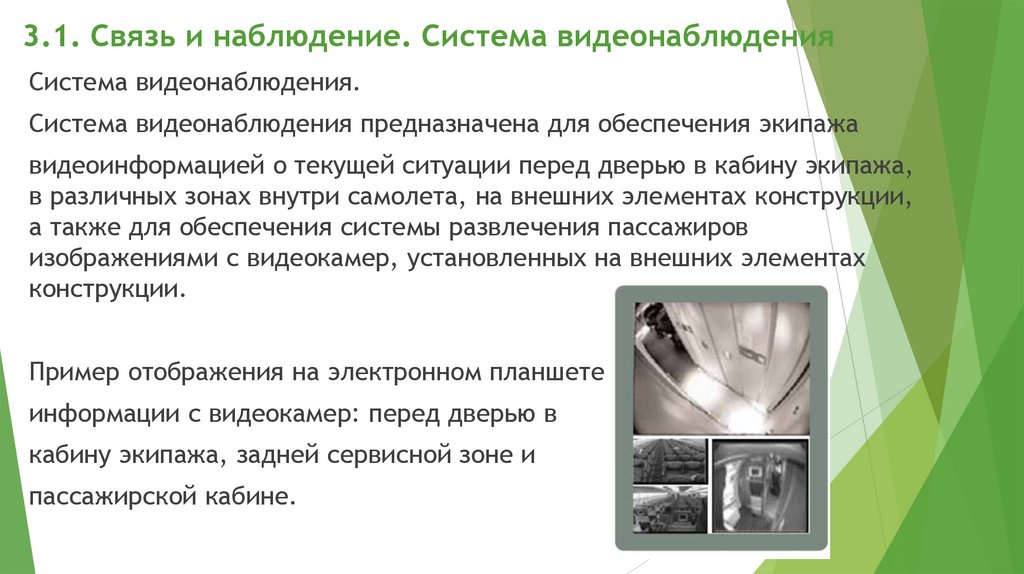
3.1. Связь и наблюдение. Система видеонаблюденияСистема видеонаблюдения.
Система видеонаблюдения предназначена для обеспечения экипажа
видеоинформацией о текущей ситуации перед дверью в кабину экипажа,
в различных зонах внутри самолета, на внешних элементах конструкции,
а также для обеспечения системы развлечения пассажиров
изображениями с видеокамер, установленных на внешних элементах
конструкции.
Пример отображения на электронном планшете
информации с видеокамер: перед дверью в
кабину экипажа, задней сервисной зоне и
пассажирской кабине.
23.
3.1. Связь и наблюдение. Система видеонаблюденияПредварительное расположение видеокамер на
внешних элементах конструкции.
24.
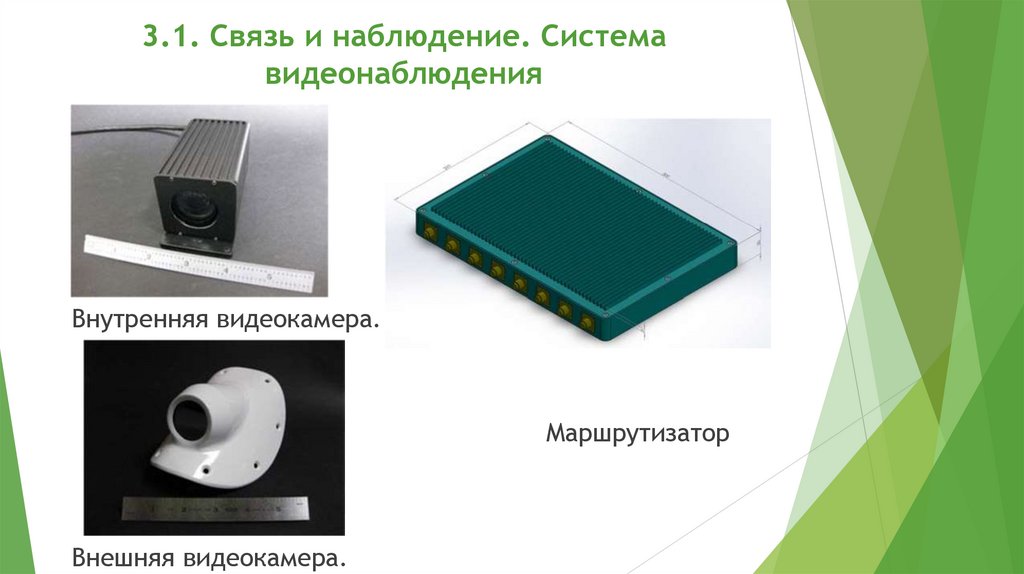
3.1. Связь и наблюдение. Системавидеонаблюдения
Внутренняя видеокамера.
Маршрутизатор
Внешняя видеокамера.
25.
3.2. Система электронной индикацииРазмещение оборудования системы электронной индикации (CDS) в кабине пилотов
26.
3.2. Система электронной индикацииСостав системы электронной индикации
1. 5 многофункциональных индикаторов (МФИ):
• Индикатор предназначен для отображения на
экране текстовой, сигнальной и графической
синтезированной информации
• диагональ рабочего поля экрана 15,4 дюйма
• Разрешение изображения 1680 х 1050 пикселей
• Угол обзора в горизонтальной плоскости +/- 60
• Угол обзора в вертикальной плоскости от - 40
до +60
27.
3.2. Система электронной индикацииСостав системы электронной индикации
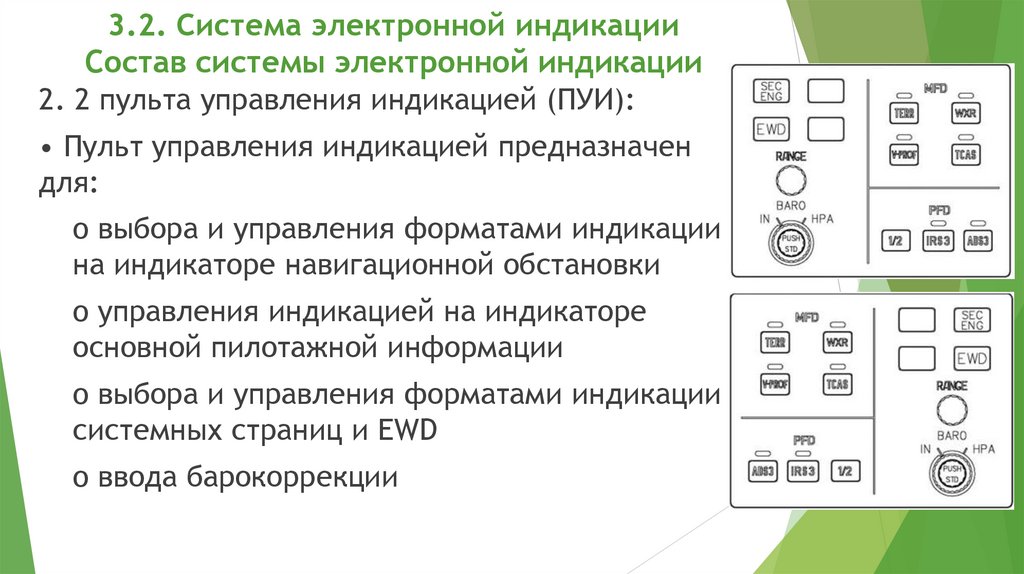
2. 2 пульта управления индикацией (ПУИ):
• Пульт управления индикацией предназначен
для:
o выбора и управления форматами индикации
на индикаторе навигационной обстановки
o управления индикацией на индикаторе
основной пилотажной информации
o выбора и управления форматами индикации
системных страниц и EWD
o ввода барокоррекции
28.
3.2. Система электронной индикацииСостав системы электронной индикации
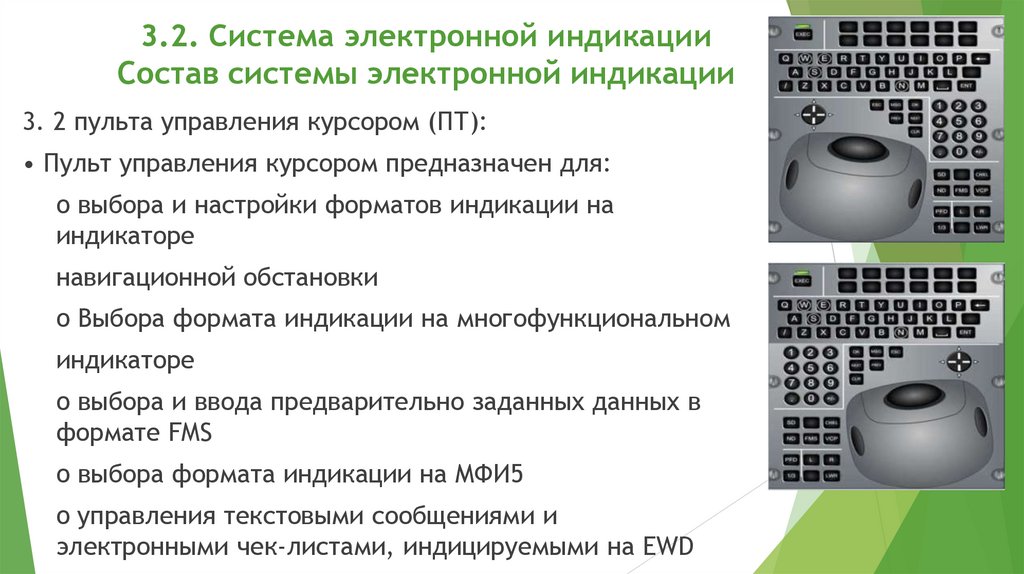
3. 2 пульта управления курсором (ПТ):
• Пульт управления курсором предназначен для:
o выбора и настройки форматов индикации на
индикаторе
навигационной обстановки
o Выбора формата индикации на многофункциональном
индикаторе
o выбора и ввода предварительно заданных данных в
формате FMS
o выбора формата индикации на МФИ5
o управления текстовыми сообщениями и
электронными чек-листами, индицируемыми на EWD
29.
3.2. Система электронной индикацииСостав системы электронной индикации
4. Система настройки радиочастот (RMS):
• Программное приложение
• Многофункциональные пульты управления (МФПУ)
30.
3.2. Система электронной индикацииСостав системы электронной индикации
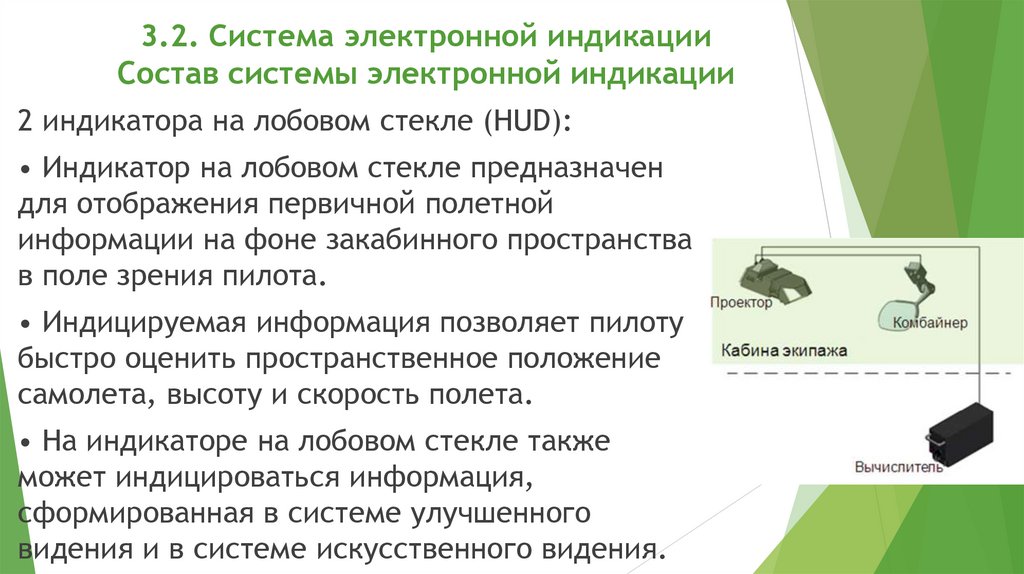
2 индикатора на лобовом стекле (HUD):
• Индикатор на лобовом стекле предназначен
для отображения первичной полетной
информации на фоне закабинного пространства
в поле зрения пилота.
• Индицируемая информация позволяет пилоту
быстро оценить пространственное положение
самолета, высоту и скорость полета.
• На индикаторе на лобовом стекле также
может индицироваться информация,
сформированная в системе улучшенного
видения и в системе искусственного видения.
31.
3.2 Система электронной индикации.Индикатор на лобовом стекле
Применение индикатора на лобовом стекле позволяет решить следующие
задачи:
• повышение безопасности полетов, в первую очередь во время посадки и
разбега;
• снижение психоэмоциональной напряженности экипажа на наиболее
сложных этапах полета;
• обеспечение регулярности вылета и прилета на аэродромах различных
классов, в том числе не отвечающих нормам метеоминимумов ИКАО, с
использованием бортового оборудования;
• позволяет получить "Эксплуатационное преимущество" при заходах на
посадку в тех случаях, когда фактическая полетная видимость меньше
предписанной в используемой процедуре инструментального захода на
посадку.
32.
3.2 Система электронной индикации.Индикатор на лобовом стекле
Индикатор на лобовом стекле состоит из следующих
элементов:
Комбайнер – располагается в поле зрения пилота и
обеспечивает совмещение проецируемого изображения и
закабинной обстановки;
Проектор – проецирует изображение на комбайнере
HUD;
Вычислитель – формирует изображение на основе
Полученных данных и передаёт его на проектор.
Кроме того, вычислитель контролирует состояние работы
проектора.
33.
3.2 Система электронной индикации.Система улучшенного видения (EVS)
Система улучшенного видения формирует по информации от оптикоэлектронных датчиков улучшенное изображение закабинной обстановки и
выводит его на индикаторы в реальном масштабе времени, обеспечивая на
всех этапах посадки, пробега и руления по ВПП в ночное время и в
условиях плохой видимости:
• повышение дальности полетной видимости ориентиров на местности (в
частности, увеличение дальности видимости ВПП при заходе на
посадку);
• повышение ситуационной осведомленности экипажа относительно
окружающего пространства (рельефа местности, препятствий, объектов
аэродромной инфраструктуры);
• повышение точности управления ВС при снижении нагрузки на экипаж.
34.
3.2 Система электронной индикации.Система улучшенного видения (EVS)
В состав системы улучшенного видения
входит:
• инфракрасный (ИК) видеодатчик
диапазона 3-5 мкм;
• ИК видеодатчик диапазона 8-14 мкм;
• телевизионный (ТВ) видеодатчик
(опционально);
• программное приложение EVS.
35.
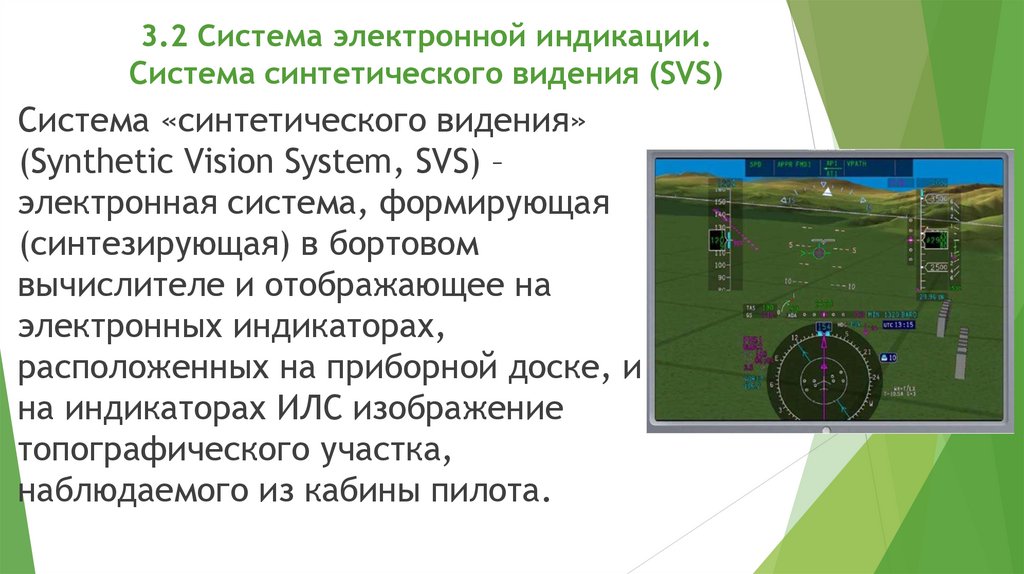
3.2 Система электронной индикации.Система синтетического видения (SVS)
Система «синтетического видения»
(Synthetic Vision System, SVS) –
электронная система, формирующая
(синтезирующая) в бортовом
вычислителе и отображающее на
электронных индикаторах,
расположенных на приборной доске, и
на индикаторах ИЛС изображение
топографического участка,
наблюдаемого из кабины пилота.
36.
3.2 Система электронной индикации.Система синтетического видения (SVS)
Функции SVS:
• обеспечение ситуационной осознанности экипажа относительно
окружающего пространства (рельефа местности, препятствий,
объектов аэродромной инфраструктуры) на всех этапах полета,
пробега и руления по ВПП в ночное время и в условиях плохой
видимости;
• снижение нагрузки на экипаж за счет возможности быстро
оценивать и прогнозировать по SVS индикации пространственное
положение и ориентацию ВС относительно заданного курса полета,
рельефа земной поверхности и аэродрома.
37.
3.2 Система электронной индикации.Система синтетического видения (SVS)
В состав системы синтетического видения
входит:
база данных подстилающей поверхности;
база данных препятствий;
база данных объектов аэродромной
инфраструктуры;
вычислитель, подготавливающий SVS кадр
для индикации.
38.
3.2 Система электронной индикации.Функции системы электронной индикации.
• Вычисление и отображение основной полетной информации
EFIS;
• Вычисление и отображение информации самолётных систем
EICAS;
• Отображение информации в формате информационного табло
(VCP);
• Вычисление и отображение информации в формате CDU
(Многофункциональный индикатор);
• Конфигурация и реконфигурация страниц на дисплеях системы;
• Мониторинг, перекрёстная проверка входных сигналов,
перекрёстная проверка синхронности изображения критичных
символов.
39.
3.2 Система электронной индикации.Функции системы электронной индикации.
Вычисление и отображение основной полетной информации EFIS:
• Отображение основной пилотажно-навигационной информации в формате PFD;
• Отображение навигационной информации, информации от метеолокатора,
TAWS и TCAS в формате ND;
• Отображение навигационной информации на территории аэропорта в формате
ANF
• Отображение вертикальной навигации в формате VD (Индикатор
Вертикального профиля полета);
• Формирование и отображение изображения от видеокамер по самолету,
включая пространство перед дверью в кабине экипажа;
• Отображение пилоту информации от системы улучшенного видения (опция);
• Отображение пилоту информации от системы синтетического видения (опция).
40.
3.2 Система электронной индикации.Функции системы электронной индикации.
Вычисление и отображение информации EICAS:
• Вычисление и Отображение информации о параметрах
двигателя и системы управления полетом (формат ED);
• Отображение предупреждающих сообщений от системы
сигнализации (формат WD);
• Отображение электронных чек-листов от системы
сигнализации;
• Вычисление и отображение системных страниц:
отображение информации, связанной с системами
самолета, такими как: STAT/APU, ELEC, HYD, AIR, FUEL,
DOOR/OXY, ENG, FCS, BRK (формат SD).
41.
3.2 Система электронной индикации.Функции системы электронной индикации.
Отображение информации в формате ИТ (VCP):
• ИТ (VCP) представляет собой виртуальный аналог пульта
управления радиосвязью, навигацией и системой обеспечения
безопасности полета, а также позволяет отображать
сообщения ATC.
• Вычисление и отображение информации в формате CDU
(Многофункциональный индикатор):
Отображение интерактивных страниц, содержащих
информацию о системах навигации и связи (FMS, ATC COM и
т.п.).
42.
3.2 Система электронной индикации.Функции системы электронной индикации.
Конфигурация и реконфигурация страниц
на дисплеях системы.
o Должна быть обеспечена возможность
ручного изменения
конфигурации окон на индикаторах и
автоматического изменения в
случае отказа одного, или нескольких
индикаторов.
43.
3.2 Система электронной индикации.Функции системы электронной индикации.
Мониторинг , перекрёстная проверка входных сигналов;
перекрёстная проверка синхронности изображения
критичных символов:
o мониторинг окон ARINC 661;
o мониторинг совместимости частей системы (включая
проверку совместимости ПО и аппаратуры);
o определение состояния зависания МФИ;
o мониторинг исправности МФИ (включая мониторинг
температуры);
o мониторинг исправности панелей управления;
o мониторинг исправности шин и других интерфейсов.
44.
3.2 Система электронной индикации.Форматы системы электронной индикации.
Форматы индикации:
PFD – основной пилотажно-навигационный
индикатор;
ND – навигационный индикатор;
EWD – индикатор параметров двигателя и
предупреждения экипажа;
SD – синоптический индикатор самолетных систем;
ИТ – информационное табло;
CDU – дисплей вычислительной системы
самолетовождения (FMS).
45.
3.2 Система электронной индикации. Форматы системыэлектронной индикации. Форматы PFD, ND, full ND
ND
PFD
VD
Full ND
46.
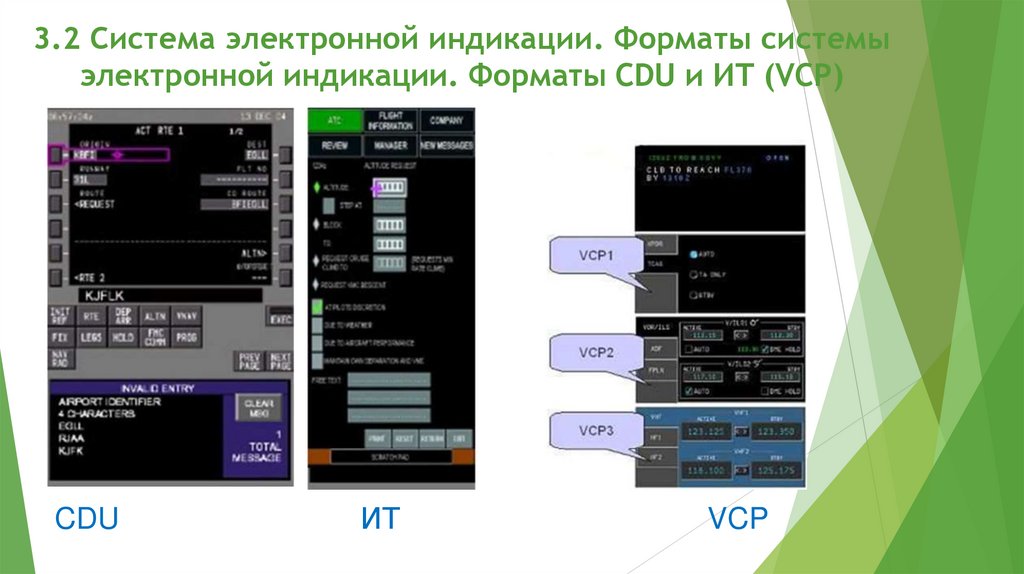
3.2 Система электронной индикации. Форматы системыэлектронной индикации. Форматы CDU и ИТ (VCP)
CDU
ИТ
VCP
47.
3.2 Система электронной индикации. Форматысистемы электронной индикации. Формат ED
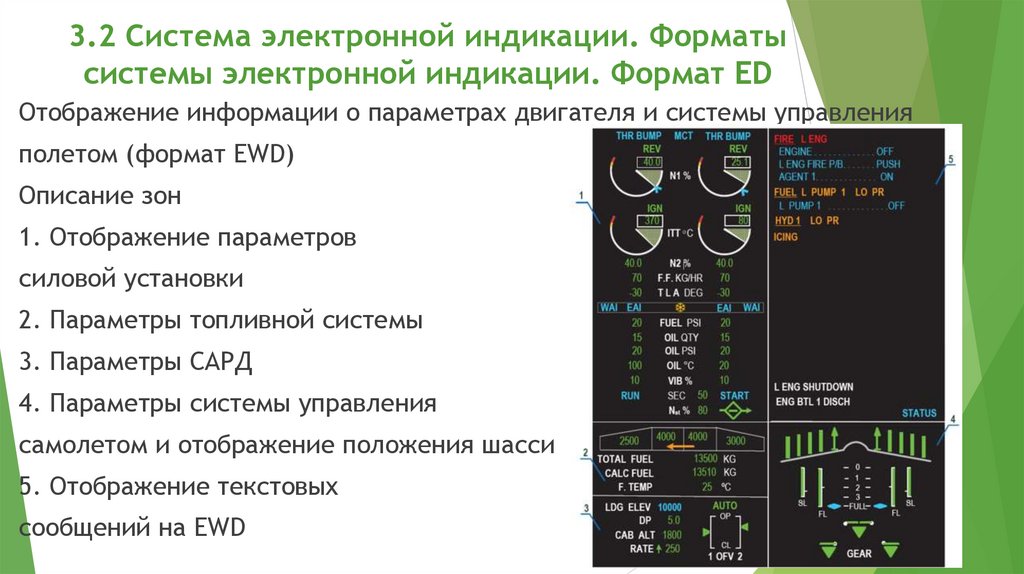
Отображение информации о параметрах двигателя и системы управления
полетом (формат EWD)
Описание зон
1. Отображение параметров
силовой установки
2. Параметры топливной системы
3. Параметры САРД
4. Параметры системы управления
самолетом и отображение положения шасси
5. Отображение текстовых
сообщений на EWD
48.
3.2 Система электронной индикации.Форматы системы электронной индикации.
Формат SD
49.
3.2 Система электронной индикации. Управлениесистемой электронной индикации. Пульт трекбол (ПТ)
50.
3.2 Система электронной индикации. Управление системойэлектронной индикации. Пульт управления индикацией
51.
3.2 Система электронной индикации.Реконфигурация системы электронной индикации.
Штатное распределение форматов индикации.
Зона командира
воздушного судна
Зона второго пилота
* – многофункциональные зоны, на которые в штатном режиме можно
вывести форматы по выбору.
52.
Система предупреждения экипажа (FWS)Система предупреждения экипажа (FWS):
• является централизованным средством для
привлечения внимания экипажа
с помощью визуальных и звуковых сигналов в
случае отказов систем
самолета или нарушения конфигурации самолета.
• Является программным приложением и
размещена в системе центральных
вычислителей (CPIOM 1C и CPIOM 2С)
53.
3.2 Система электронной индикации. Системапредупреждения экипажа (FWS). Оборудование и управление.
54.
3.2 Система электронной индикации.Функции системы предупреждения экипажа.
• Формирование и выдача на индикацию в реальном масштабе времени
текстовых сообщений;
• Формирование сигналов сильно привлекающего действия (ЦСО);
• Формирование фаз полета и их использование для блокировки вывода
сообщений об отказах, если они рассматриваются как не относящиеся к
данной фазе полета;
• Формирование сообщений для записи на параметрический аварийный
регистратор;
• Управление чек-листами для соответствующих аварийных и
предупреждающих сообщений (на кадре EWD);
• Индикация и формирование перечня неработающих систем (INOP SYS),
отображаемого на странице STATUS.
55.
3.2 Система электронной индикации.Функции системы предупреждения экипажа.
Формирование и выдача на индикацию в реальном масштабе времени
текстовых сообщений:
o Формирование аварийных текстовых сообщений на основании данных
о конфигурации самолёта и состоянии самолётных систем;
o Формирование предупреждающих текстовых сообщений на основании
данных о конфигурации самолёта и состоянии самолётных систем;
o Формирование уведомляющих текстовых сообщений на основании
данных о конфигурации самолёта и состоянии самолётных систем;
o Определение, какие из сформированных отказов должны быть выданы на
индикацию и установление приоритета сообщений об отказах.
56.
3.2 Система электронной индикации.Функции системы предупреждения экипажа.
Формирование сигналов сильно привлекающего действия:
o Выдача сигнала на поджиг ЦСО Master WARNING при активации
аварийных текстовых сообщений;
o Выдача сигнала на поджиг ЦСО Master CAUTION при активации
предупреждающих текстовых сообщений;
o Прекращение мигания ЦСО Master WARNING и Master CAUTION,
когда снимаются условия формирования данного отказа или когда
сообщение подтверждено;
o Выдача звуковой сигнализации в зависимости от приоритета отказа и
подтверждения о прочтении сообщения;
o Прекращение звуковой сигнализации, когда снимаются условия
формирования данного отказа или когда сообщение подтверждено;
o Разделение визуальной сигнализации нескольких предупреждений
57.
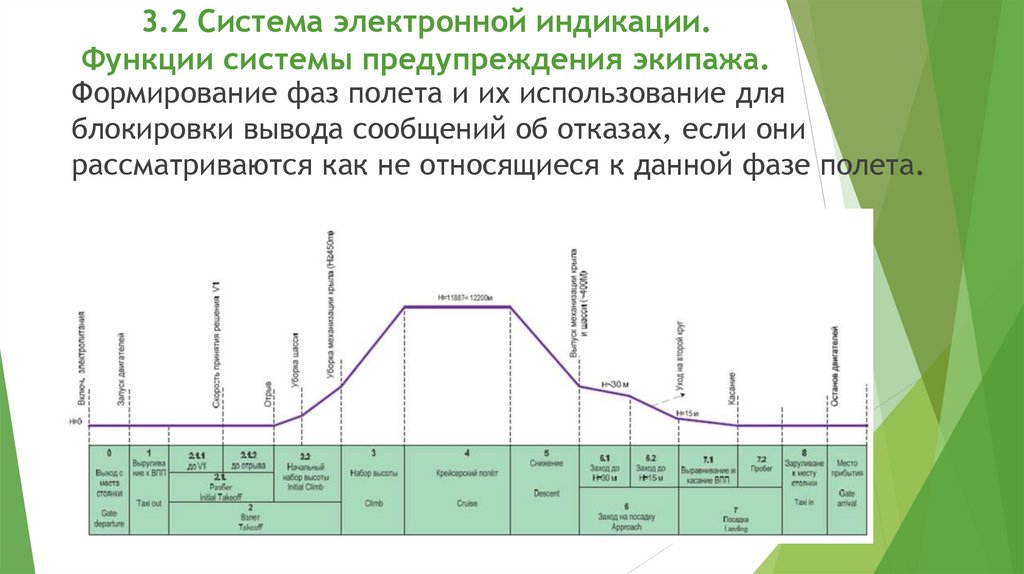
3.2 Система электронной индикации.Функции системы предупреждения экипажа.
Формирование фаз полета и их использование для
блокировки вывода сообщений об отказах, если они
рассматриваются как не относящиеся к данной фазе полета.
58.
3.2 Система электронной индикации. Системапредупреждения о критических режимах полёта
Система предупреждения о критических
режимах полета (CMAS):
• Система предупреждения о критических
режимах полета обеспечивает
предупреждение экипажа в случае
приближения самолета к состоянию
сваливания.
• реализована в программных приложениях
блоков вычисления и концентрации данных
(CPIOM).
59.
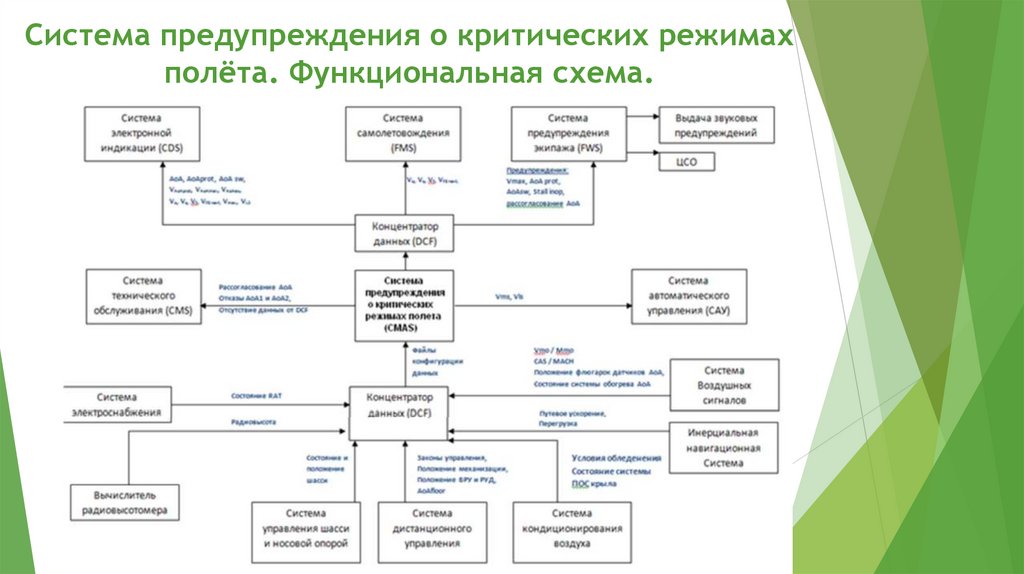
Система предупреждения о критических режимахполёта. Функциональная схема.
60.
3.2 Система электронной индикации. Функции системыпредупреждения о критических режимах полёта.
• Вычисление и выдача в систему электронной индикации максимально и
минимально допустимых значений скорости, используемых для индикации
на шкале скорости;
• Вычисление значений угла атаки, индицируемых на шкале угла атаки;
• Формирование логики выдачи предупреждений в случаях, когда
достигается критическое значение угла атаки или скорости;
• Вычисление критических скоростей для систем-потребителей;
• Выполнение функции встроенного контроля: система должна
осуществлять мониторинг входных параметров системы предупреждения
о критических режимах полета и передавать данные в систему
технического обслуживания.
• Выполнение проверки конфигурации самолета/системы авионики
61.
3.2 Система электронной индикации. Функции системыпредупреждения о критических режимах полёта.
• Вычисление и выдача в систему электронной индикации максимально и
минимально допустимых значений скорости, используемых для индикации
на шкале скорости:
o Вычисление скоростей, соответствующих границам зон,
индицируемым на шкале скорости:
VMAX (максимальная безопасная скорость)
VLS (минимальная выбранная скорость)
VAOA prot (скорость, соответствующая уровню защиты по критическим углам атаки)
VAOA MAX (скорость, соответствующая максимальному углу атаки в обычном режиме)
VAOA SW (скорость предупреждения о сваливании)
o Вычисление скоростей, соответствующих информации о скоростях VS (минимальная скорость
уборки закрылков), VF (минимальная скорость уборки предкрылков), VFE next (максимальная
скорость выпуска закрылков/предкрылков), VO (скорость «green dot») на шкале скорости
62.
3.2 Система электронной индикации. Функции системыпредупреждения о критических режимах полёта.
• Вычисление значений угла атаки, индицируемых на шкале угла
атаки;
o вычисление значений угла атаки, соответствующих границам зон,
индицируемым на шкале угла атаки: AOASW и AOAPROT
o вычисление текущих значений угла атаки для индикации на шкале.
• Формирование логики выдачи предупреждений в случаях, когда
достигается критическое значение угла атаки или скорости:
o Превышение максимальной скорости (Vmax)
o Активация защиты от сваливания по углу атаки (AOAprot)
o Предупреждение о сваливании (AOAsw)
63.
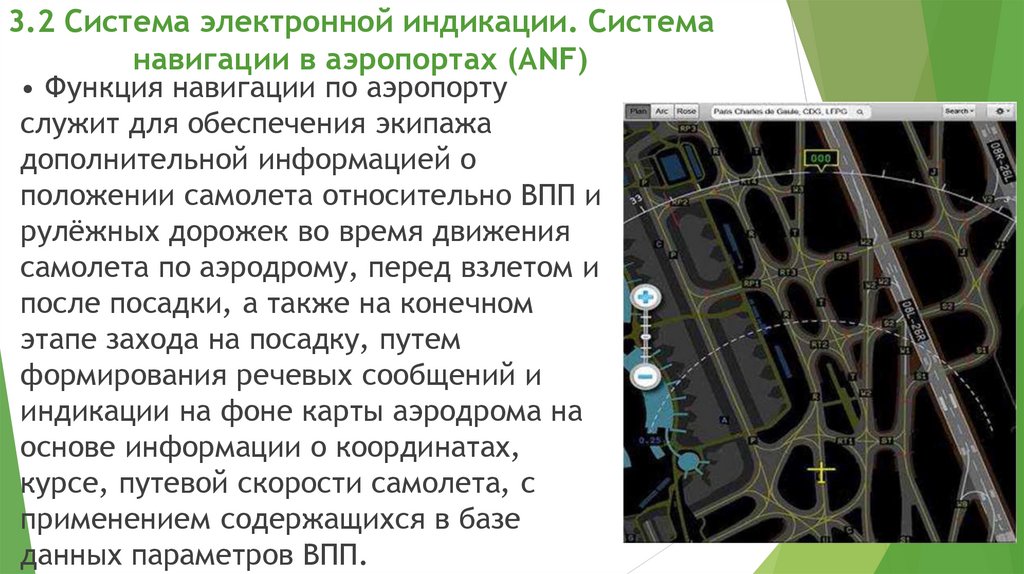
3.2 Система электронной индикации. Системанавигации в аэропортах (ANF)
• Функция навигации по аэропорту
служит для обеспечения экипажа
дополнительной информацией о
положении самолета относительно ВПП и
рулёжных дорожек во время движения
самолета по аэродрому, перед взлетом и
после посадки, а также на конечном
этапе захода на посадку, путем
формирования речевых сообщений и
индикации на фоне карты аэродрома на
основе информации о координатах,
курсе, путевой скорости самолета, с
применением содержащихся в базе
данных параметров ВПП.
64.
3.2 Система электронной индикации.Электронный планшет лётчика
В состав электронного планшета
входят:
• 2 Модуля дисплея и монтажный
комплект электронного планшета
лётчика EFB;
• Блок концентратор данных
электронного планшета лётчика EFB.
65.
3.2 Система электронной индикации.Электронный планшет лётчика
Для установки на EFB доступны приложения классов A и B (в соответствии
с FAA - AC120-76В).
• Электронные карты (с нанесенными аэропортами, данными по взлету,
посадке, заходу на посадку, маршруту движения),
• Расчёт технических характеристик на взлете, пролете по маршруту, при
заходе на посадку, посадке и т.д.,
• Расчеты веса и центровки
• Просмотр руководства по лётной эксплуатации воздушного судна,
• Просмотр стандартных электронных перечней рекомендаций по
действиям экипажа,
• Просмотр изображения с камер системы видеонаблюдения и т.д.
66.
3.3. Радиотехническое оборудованиенавигации и посадки. Назначение.
• осуществление выдачи пилотажно-навигационной информации для
автоматического захода на посадку по нормам I, II, IIIА и IIIB;
• осуществление автоматической посадки по нормам IIIA и IIIB категорий
ICAO по сигналам радиотехнических систем посадки ILS;
• осуществление выдачи пилотажно-навигационной информации для
автоматического захода на посадку по категориям I и II ICAO по данным
системы Global Navigation Satellite System (GNSS) с возможностью
использования дифференциального режима GBAS;
• осуществление выдачи пилотажно-навигационной информации для
автоматического захода на посадку по данным системы GNSS с
возможностью использования дифференциального режима SBAS;
• выдача информации для определения координат местоположения cамолета.
67.
3.3. Радиотехническое оборудованиенавигации и посадки. Состав.
Состав:
• INS (интегрированная навигационная
система)
• RA (радиовысотомер)
• DME (оборудование измерения дальности
до наземного маяка)
• ADF (автоматический радиокомпас)
• GLONASS (Глобальная навигационная
спутниковая система)
68.
3.3. Радиотехническое оборудование навигации и посадки.Структурная схема системы интегрированной навигационной.
69.
3.3. Радиотехническое оборудование навигации и посадки.Состав системы интегрированной навигационной (INS)
В состав системы интегрированной
навигационной входит:
• 2 блока интегральных навигационных
приемников (INR)
• 1 двухканальная антенна
всенаправленного маяка AT-113-5,
(совместно используемая обоими INR)
70.
3.3. Радиотехническое оборудование навигациии посадки. Состав системы интегрированной
навигационной (INS)
• 1 антенна маркерного
маяка S35-1000-1
• 1 делитель маркерного маяка
71.
3.3. Радиотехническое оборудование навигации и посадки.Состав системы интегрированной навигационной (INS)
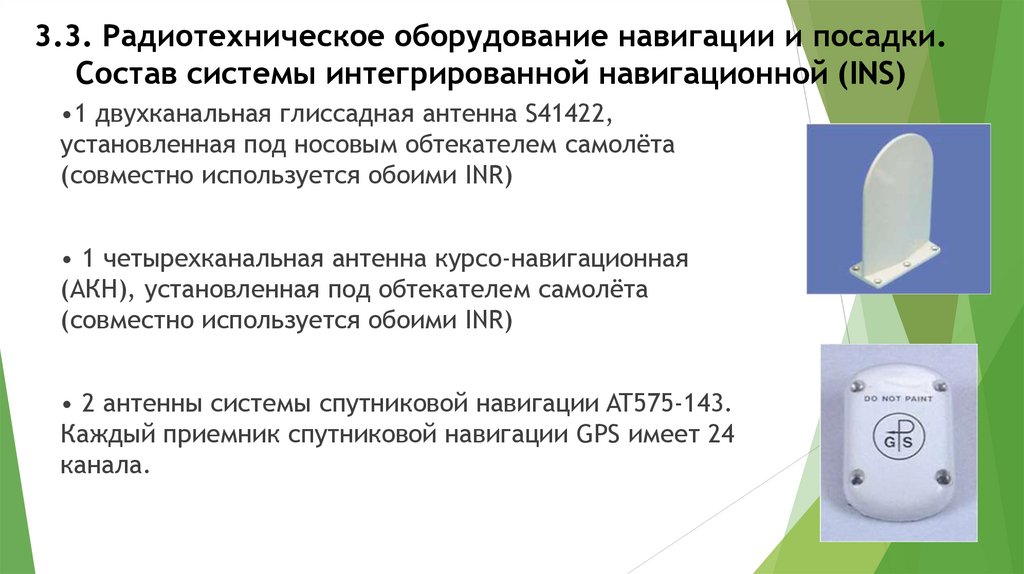
•1 двухканальная глиссадная антенна S41422,
установленная под носовым обтекателем самолёта
(совместно используется обоими INR)
• 1 четырехканальная антенна курсо-навигационная
(АКН), установленная под обтекателем самолёта
(совместно используется обоими INR)
• 2 антенны системы спутниковой навигации AT575-143.
Каждый приемник спутниковой навигации GPS имеет 24
канала.
72.
3.3. Радиотехническое оборудование навигации и посадки.Функции системы интегрированной навигационной (INS)
Блоки INR выполняют следующие функции:
• Приём, декодирование и обработку информации пеленга из сигнала
всенаправленного радиомаяка (VOR);
• Приём, декодирование и обработку сигналов маркерного радиомаяка;
• Расчёт отклонений самолета от посадочного курса, сформированного
курсовым посадочным радиомаяком и от плоскости глиссады снижения,
сформированной глиссадным посадочным радиомаяком наземного
оборудования системы ILS;
• Генерирование аудиосигналов системы ILS для идентификации
наземных станций;
• Расчет данных системы GPS по сигналам принятым от спутников
системы GPS и выдачи их потребителям.
73.
3.3. Радиотехническое оборудование навигации и посадки.Состав и функции системы измерения радиовысоты (RA)
Система измерения радиовысоты (RA) – предназначена для точного
измерения расстояния от самолета до земли. В состав системы
измерения радиовысоты входит:
• 2 блока приемопередатчиков ALA-52B
• 4 антенны S67-2002-18
74.
3.3. Радиотехническое оборудование навигации и посадки.Состав системы измерения дальности (DME).
В состав системы измерения дальности входит:
• 2 блока приемопередатчиков
•DMA-37B
• 2 всенаправленные антенны
L-диапазона AT-130-6
75.
3.3. Радиотехническое оборудование навигации и посадки.Функции системы измерения дальности (DME).
Приемопередатчик DME выполняет следующие функции:
• Обеспечивает прием информации от отдельных станций в режиме
направленного сканирования или всех станций в диапазоне работы DME.
• Посылает пары импульсов запрашивающих сигналов на наземную
станцию, которая, в свою очередь, посылает назад кодированные
ответные сигналы для каждого полученного запроса.
• Измеряет время задержки на двустороннюю передачу от самолета на
наземную станцию и пересчитывает эту задержку в величину наклонной
дальности.
Российский аналог VOR/DME – система РСБН (Радинавигационная система
ближней навигации)
76.
3.3. Радиотехническое оборудование навигации и посадки.Состав системы автоматического радиокомпаса (ADF).
В состав системы автоматического радиокомпаса входит:
• 1 приемник DFA-75B
• 1 антенна S-72-1712
Опционально предусмотрена установка второго комплекта ADF.
77.
3.3. Радиотехническое оборудование навигации и посадки.Функции системы автоматического радиокомпаса (ADF).
• Установка одного приемника ADF обеспечивает способность
определения направления на ненаправленные маяки или
радиостанции AM-сигналов, работающих в частотных диапазонах от
190 до 1799, от 2088 до 2094 и от 2179 до 2185 кГц.
• Приемник ADF осуществляет демодуляцию сигнала радиостанций и
определяет курсовой угол наземного радиомаяка относительно
строительной оси самолета. Аналоговые сигналы (звуковые)
принимаемые ADF используются для опознания позывных радиомаяка
(кода Морзе) экипажем.
• ADF обеспечивает также функционирование генератора на
тональных биениях BFO для генерирования аудиосигнала с частотой
1000 Гц для обнаружения немодулированных или непрерывных
волновых признаков.
78.
3.3. Радиотехническое оборудование навигации ипосадки. Состав приёмника ГЛОНАСС/GPS.
В состав приемника сигналов ГЛОНАСС/GPS входит:
• 1 блок приемовычислителя (БПВ)
Каждый БПВ имеет 24 канала.
• 1 блок усилителей МШ-РФС
• 1 антенна А101П
79.
3.3. Радиотехническое оборудование навигации ипосадки. Функции приёмника ГЛОНАСС/GPS.
Приемник сигналов ГЛОНАСС/GPS
выполняет следующие функции:
Расчет данных систем GPS и GLONASS по
сигналам, принятым от спутников системы
GPS и от спутников системы GLONASS, и
выдача их потребителям.
80.
3.4 Система предупреждения внешних угроз.Назначение
• Выполнение мониторинга окружающего пространства с целью обнаружения и
разрешения конфликтных ситуаций с формированием и выдачей экипажу
предупреждающей и рекомендательной информации:
o Обнаружение, прогнозирование развития и предупреждение экипажа об
угрозе столкновения с другим самолётами (функция TCAS);
o Обнаружение, прогнозирование развития и предупреждение экипажа о
потенциальной угрозе опасных сближений с другими ВС (функция ADSB);
o обнаружение, прогнозирование развития и предупреждение экипажа об
угрозе попадания в область опасных гидрометеообразований, грозовых
очагов, зон повышенной турбулентности и сдвига ветра по курсу следования
ВС (функция WXR);
o обнаружение, прогнозирование развития и предупреждение экипажа об
опасном сближении с земной поверхностью (подфункция EGPSW);
81.
3.4 Система предупреждения внешних угроз.Назначение
o Обнаружение и предупреждение экипажа о наземных препятствиях в полёте
по данным цифровой карты местности и баз данных аэродрома, искусственных
препятствий и ВПП (подфункция EGPSW);
o Обнаружение и предупреждение экипажа о попадании в опасную зону сдвига
ветра (подфункция EGPSW);
o Обеспечение информацией для обнаружения и распознавания наземных
ориентиров и типовых ландшафтных зон на земной поверхности, таких как
крупные города, русла рек, береговые границы водных массивов (подфункция
WXR);
o Обеспечение экипажа дополнительной информацией о положении самолета
относительно ВПП и рулёжных дорожек во время движения самолета по
аэродрому, перед взлетом и после посадки, а также на конечном этапе захода
на посадку, путем формирования речевых сообщений и индикации на фоне
карты аэродрома на основе информации о координатах, курсе, путевой скорости
самолета, и параметров ВПП, содержащихся в базе данных системы EGPSW.
82.
3.4 Система предупреждения внешних угроз.Состав
Состав:
• WXR (метеолокатор)
• TCAS (система предупреждения столкновений в
воздухе)
• ATC (система управления воздушным
движением)
• EGPWS (система предупреждения о
приближении к земле)
• 4280 (ответчик системы государственного
опознавания)
83.
3.4 Система предупреждения внешних угроз.Состав метеолокатора.
Метеолокатор состоит из следующих компонентов:
• Вычислитель (RP-1);
• Привод антенны (DA-1S) с
установленными приемопередатчиком
(TR-1) и антенной (FP-24-1)
84.
3.4 Система предупреждения внешних угроз.Функциональное описание метеолокатора
Метеолокатор предназначен для определения и анализа метеообразований,
отображения рельефа местности, а также обнаружения сдвига ветра
впереди по курсу самолета. Метеолокатор работает как часть системы
индикации в кабине экипажа, определяет метеообразования, опасные для
прохождения воздушного судна, обеспечивая лётный экипаж цветной
визуальной информацией о грозовых образованиях, турбулентности, сдвиге
ветра и рельефе местности.
Функции системы метеолокатора:
• Обнаружение метеообразований;
• Обнаружение турбулентности;
• Обнаружение сдвига ветра;
• Функция картографирования (GMAP).
85.
3.4 Система предупреждения внешних угроз.Система предупреждения столкновений в воздухе
(TCAS). Назначение
TCAS представляет собой автономную
систему, предназначенную для
выдачи экипажу рекомендаций по
предотвращению столкновении ВС в
воздухе, информации об окружающих ВС и
функции обеспечения смены
эшелона при полёте в неконтролируемом
воздушном пространстве.
86.
3.4 Система предупреждения внешних угроз. Системапредупреждения столкновений в воздухе (TCAS). Состав.
TCAS реализована на базе системы TPA-100B, которая
включает в себя:
вычислитель TPA-100B
ANT-81A.
2 антенны
87.
3.4 Система предупреждения внешних угроз. Системапредупреждения столкновений в воздухе (TCAS). Описание.
Режимы работы TCAS:
• STANDBY
- Информация об окружающих ВС не выдаётся.
- Оценка опасности сближения с другими ВС не осуществляется.
- Рекомендации по уходу от столкновения не выдаются.
• TA only
- Информация об окружающих ВС выдаётся
- Осуществляется оценка опасности сближения с другими ВС
- Рекомендации по уходу от столкновения не выдаются.
• TA/RA
- Информация об окружающих ВС выдаётся.
- Оценка опасности сближения с другими ВС осуществляется.
- Выдаются рекомендации по уходу от столкновения.
88.
3.4 Система предупреждения внешних угроз.Система предупреждения столкновений в
воздухе (TCAS). Описание.
Переключение между режимами может осуществляться вручную экипажем
и автоматически в зависимости от работоспособности смежных систем и
фазы полёта.
Основные функции
При опасном сближении с другими ВС TCAS выдает экипажу рекомендации
по выполнению манёвра, который предотвратит столкновение.
Рекомендации состоят из речевого сообщения, однозначно описывающего
требуемый манёвр, и визуальной индикации на дисплеях по выполнению
манёвра в вертикальной плоскости.
89.
3.4 Система предупреждения внешних угроз. Системапредупреждения столкновений в воздухе (TCAS). Описание.
Дополнительные функции
• Функция информирования экипажа о других ВС (Hybrid Surveillance).
o На комплексных дисплеях отображаются метки других ВС, как
представляющих опасность, так и находящихся на безопасном расстоянии и
без пересечения траектории полёта. Возможно получение подробной
информации по каждому ВС (номер рейса, путевая скорость и т.п.).
• Функция обеспечения смены эшелона при полёте в неконтролируемом
воздушном пространстве (In-Tail Procedure).
o Данная функция позволяет пилотам выполнять смену эшелона полёта в
пространствах, где информация о точном местоположении и взаимном
расположении ВС недоступна для диспетчера (например, воздушные
пространства над океанами), основываясь на информации от системы TCAS
о других ВС, которые могут или не могу помешать планируемому манёвру.
90.
3.4 Система предупреждения внешних угроз. Состав ифункциональное описание системы управления воздушным
движением (ATC) (XPDR)
В состав системы управления воздушным движением
входит:
•1 ответчик TRA-100B
• 4 антенны ATC
91.
3.4 Система предупреждения внешних угроз. Состави функциональное описание системы управления
воздушным движением (ATC) (XPDR)
Функциональные возможности ответчика:
• Mode S. Передача данных о самолёте (номер рейса и
т.п.) и параметров движения (высота, скорость, курс и
т.п.) в ответ на запросы в режиме S.
• ADS-B. Широковещательная передача данных о самолёте
(номер рейса и т.п.) и параметров движения (высота,
скорость, курс и т.п.).
92.
3.4 Система предупреждения внешнихугроз. Система предупреждения о
приближении к земле (EGPWS). Назначение
EGPWS представляет собой автономную систему, предназначенную:
• для выдачи экипажу информации и своевременных
предупреждений с целью предотвращения столкновении ВС с
подстилающей поверхностью в управляемом полёте;
• для оповещения экипажа о попадании в сдвиг ветра (RWS);
• для выдачи экипажу информации и своевременных
предупреждений с целью предотвращения непреднамеренного
выезда на ВПП или выкатки за пределы ВПП (RAAS).
EGPWS построена на базе вычислителя Mark MK-V A.
93.
3.4 Система предупреждения внешних угроз. Система предупреждения оприближении к земле (EGPWS). Описание режимов.
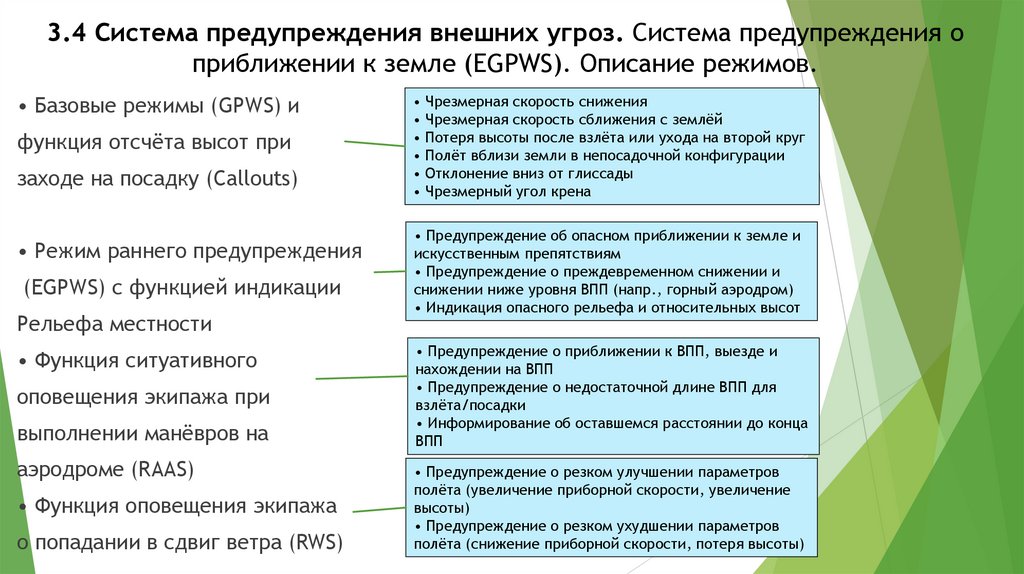
• Базовые режимы (GPWS) и
функция отсчёта высот при
заходе на посадку (Callouts)
• Режим раннего предупреждения
(EGPWS) с функцией индикации
Рельефа местности
• Функция ситуативного
оповещения экипажа при
выполнении манёвров на
аэродроме (RAAS)
• Функция оповещения экипажа
о попадании в сдвиг ветра (RWS)
• Чрезмерная скорость снижения
• Чрезмерная скорость сближения с землёй
• Потеря высоты после взлёта или ухода на второй круг
• Полёт вблизи земли в непосадочной конфигурации
• Отклонение вниз от глиссады
• Чрезмерный угол крена
• Предупреждение об опасном приближении к земле и
искусственным препятствиям
• Предупреждение о преждевременном снижении и
снижении ниже уровня ВПП (напр., горный аэродром)
• Индикация опасного рельефа и относительных высот
• Предупреждение о приближении к ВПП, выезде и
нахождении на ВПП
• Предупреждение о недостаточной длине ВПП для
взлёта/посадки
• Информирование об оставшемся расстоянии до конца
ВПП
• Предупреждение о резком улучшении параметров
полёта (увеличение приборной скорости, увеличение
высоты)
• Предупреждение о резком ухудшении параметров
полёта (снижение приборной скорости, потеря высоты)
94.
3.4 Система предупреждения внешних угроз. Состав ответчикасистемы государственного опознавания.
1 блок приемоответчика 4280Х.1 2 антенны 4280А1.1 - 2Р;
Изделие 6110-11
95.
3.4 Система предупреждения внешнихугроз. Функциональное описание ответчика
системы государственного опознавания
Ответчик системы ГО (изделие 4280) предназначен для
работы в системе государственного опознавания России
«Пароль».
При работе в системе «Пароль» изделие 4280 позволяет
идентифицировать государственную принадлежность
самолета.
Изделие 4280 работает с бортовыми, наземными и
корабельными запросчиками государственного опознавания.
96.
3.5. Интегрированная вычислительная системаИВС.Структура ИВС.
97.
3.5. Интегрированная вычислительнаясистема. Распределение ФПО по ЦВА
98.
3.5. Интегрированная вычислительнаясистема. Структурная схема сети AFDX.
99.
3.6. Пилотажно-навигационное оборудование.Состав:
• IRS (инерциальная навигационная
система)
• ИРП (интегрированный резервный
прибор)
• Компас
• СВС (система воздушных сигналов)
100.
3.6. Пилотажно-навигационное оборудование.Инерциальнаянавигационная система (IRS). Назначение.
IRS предназначена для автономного определения
параметров пространственного положения, курса,
координат местоположения самолёта и других
инерциальных параметров.
Измеренные параметры:
• выдаются экипажу посредством системы
электронной индикации;
• передаются в смежные системы
(автопилот, вычислительная система
самолётовождения и т.п.).
101.
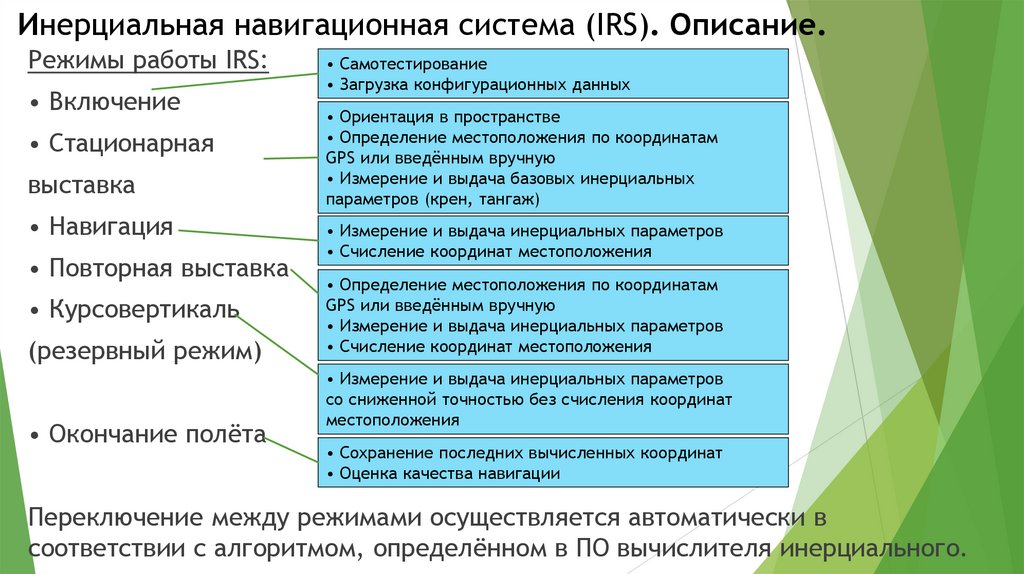
Инерциальная навигационная система (IRS). Описание.Режимы работы IRS:
• Включение
• Стационарная
выставка
• Навигация
• Повторная выставка
• Курсовертикаль
(резервный режим)
• Окончание полёта
• Самотестирование
• Загрузка конфигурационных данных
• Ориентация в пространстве
• Определение местоположения по координатам
GPS или введённым вручную
• Измерение и выдача базовых инерциальных
параметров (крен, тангаж)
• Измерение и выдача инерциальных параметров
• Счисление координат местоположения
• Определение местоположения по координатам
GPS или введённым вручную
• Измерение и выдача инерциальных параметров
• Счисление координат местоположения
• Измерение и выдача инерциальных параметров
cо сниженной точностью без счисления координат
местоположения
• Сохранение последних вычисленных координат
• Оценка качества навигации
Переключение между режимами осуществляется автоматически в
соответствии с алгоритмом, определённом в ПО вычислителя инерциального.
102.
3.6. Пилотажно-навигационное оборудование.Интегрированный резервный прибор. Назначение.
ИРП предназначен для независимого от основных
самолётных систем измерения/вычисления
высотно-скоростных и инерциальных параметров и
их индикации.
Дополнительно ИРП обеспечивает резервную
индикацию информации от системы
инструментальной посадки (ILS), необходимую для
безопасного завершения полёта при отказе
основных индикаторов в полёте.
103.
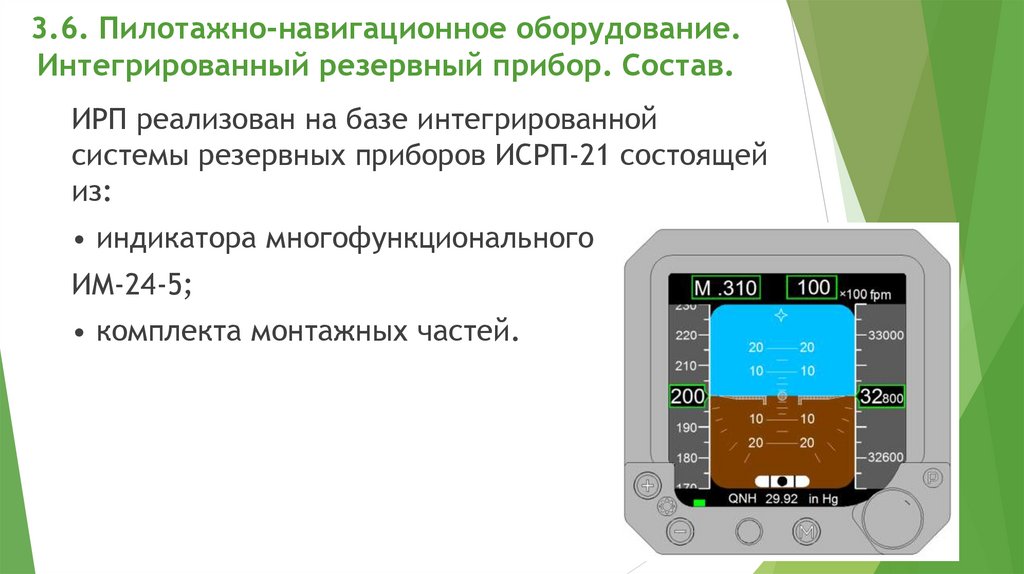
3.6. Пилотажно-навигационное оборудование.Интегрированный резервный прибор. Cостав.
ИРП реализован на базе интегрированной
системы резервных приборов ИСРП-21 состоящей
из:
• индикатора многофункционального
ИМ-24-5;
• комплекта монтажных частей.
104.
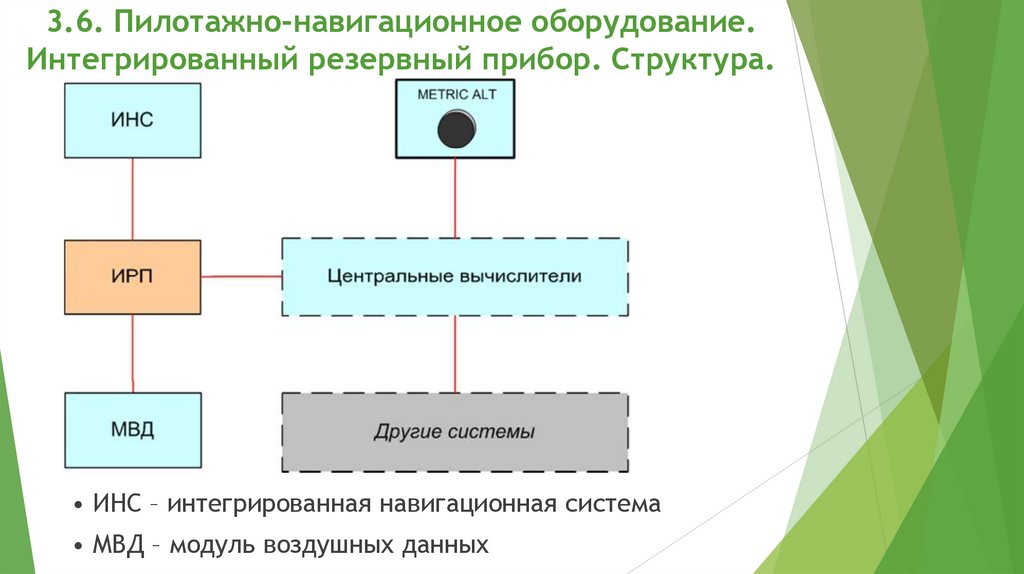
3.6. Пилотажно-навигационное оборудование.Интегрированный резервный прибор. Cтруктура.
• ИНС – интегрированная навигационная система
• МВД – модуль воздушных данных
105.
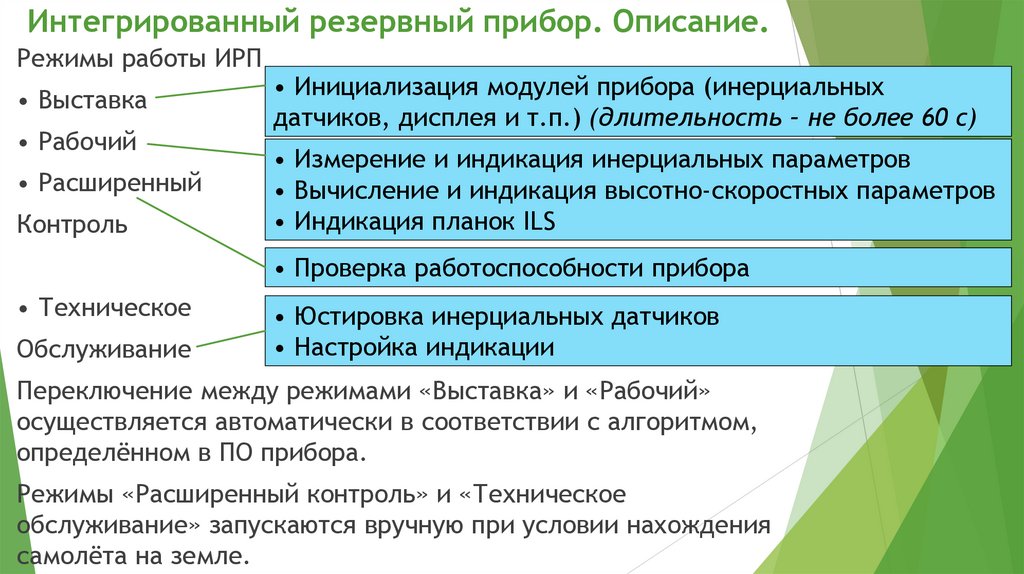
Интегрированный резервный прибор. Описание.Режимы работы ИРП
• Выставка
• Рабочий
• Расширенный
Контроль
• Инициализация модулей прибора (инерциальных
датчиков, дисплея и т.п.) (длительность – не более 60 с)
• Измерение и индикация инерциальных параметров
• Вычисление и индикация высотно-скоростных параметров
• Индикация планок ILS
• Проверка работоспособности прибора
• Техническое
Обслуживание
• Юстировка инерциальных датчиков
• Настройка индикации
Переключение между режимами «Выставка» и «Рабочий»
осуществляется автоматически в соответствии с алгоритмом,
определённом в ПО прибора.
Режимы «Расширенный контроль» и «Техническое
обслуживание» запускаются вручную при условии нахождения
самолёта на земле.
106.
3.6. Пилотажно-навигационное оборудование.Компас.
Компас представляет собой автономный компонент,
который предоставляет лётному экипажу данные о
магнитном курсе, независимо от основных
навигационных систем.
107.
3.6. Пилотажно-навигационное оборудование. Назначениеи состав системы измерения воздушных данных.
Система измерения воздушных данных предназначена для измерения,
вычисления и выдачи на индикацию экипажу и в бортовые системы
информации о высотно-скоростных параметрах, температуре воздуха и угле
атаки.
Система измерения воздушных данных состоит из четырёх подсистем: трёх
основных и резервной — четвёртой.
Система измерения воздушных данных включает в себя:
• 3 ADS (air data system – система воздушных сигналов) вычислителя;
• 12 преобразователей давление - код;
• 4 приемника полного давления;
• 8 приемников статического давления;
• 2 датчика измерения температуры;
• 4 датчика угла атаки;
• 4 контроллера обогрева.
108.
3.6. Пилотажно-навигационное оборудование. Состав системыизмерения воздушных данных.
Первая и вторая подсистемы измерения воздушных
данных состоят из:
• ADS вычислителя;
• приемника полного давления;
• двух приемников статического давления;
• одного датчика угла атаки;
• одного датчика измерения температуры воздуха;
• трех преобразователей давление - код (один для
приемника полного давления и два для приемников
статического давления);
• 1 контроллер обогрева.
109.
3.6. Пилотажно-навигационное оборудование.Состав системы измерения воздушных данных.
Третья подсистема измерения воздушных данных состоит
из:
• ADS вычислителя;
• приемника полного давления;
• двух приемников статического давления;
• двух датчиков угла атаки;
• одного датчика измерения температуры воздуха;
• трех преобразователей давление - код (один для
приемника полного давления и два для приемников
статического давления);
• 1 контроллер обогрева.
110.
3.6. Пилотажно-навигационное оборудование.Состав системы измерения воздушных данных.
Четвёртая (резервная) подсистема
измерения воздушных данных состоит из:
• приемника полного давления;
• двух приемников статического давления;
• трех преобразователей давление – код
(один для приемника полного
давления и два для приемников
статического давления);
• 1 контроллер обогрева.
111.
3.7. Бортовая система техническогообслуживания (БСТО)
БСТО является программно-распределенной
системой, накапливающей и анализирующей
результаты работы встроенного контроля
(ВСК) систем самолета.
Основное приложение БСТО располагается в
вычислителе БРЭО, системы самолета
содержат ПО, формирующее посылки от ВСК.
Информация об отказах отображается на
МФИ в кабине или на переносном
портативном терминале.
112.
3.8. Вычислительная система самолетовождения (FMS)ВСС (FMS) предназначена для выполнения задач планирования и
выполнения автоматического и ручного самолетовождения в
горизонтальной и вертикальной плоскостях полета.
Вычислительная система самолетовождения является программным
приложением, реализованным на центральных вычислителях CPIOM.
Система предназначена для решения следующих задач:
• Навигация;
• Планирование маршрута;
• Вычисление и выдача информации для вертикального и
горизонтального управления;
• Вычисление топливно-временных параметров полета;
• Отображение графической и символьной информации.
113.
3.8 FMS. Описание.FMS предназначена для обеспечения автоматического,
директорного и ручного самолётовождения в горизонтальной и
вертикальной плоскостях полёта с формированием
информационных и управляющих сигналов, необходимых для
решения задачи навигации 4D без ограничения по широте и
долготе, в любое время суток и в любых метеоусловиях, с
оптимизацией режимов полёта, выполнения задач
планирования и выполнения автоматического захода на
посадку и схем выхода.
FMS является программным приложением с уровнем
критичности С (DAL C), выполняемым на центральных
вычислителях CPIOM (1B и 2B).
114.
3.8 FMS. Описание.Основные задачи системы FMS:
• Непрерывное автоматическое определение навигационных
параметров в режимах комплексной обработки информации;
• Формирование и оперативное изменение плана полета;
• Формирование и выдача управляющих и информационных
сигналов в комплексную систему управления (КСУ) и систему
индикации для обеспечения управления полётом в
горизонтальной и вертикальной плоскости;
• Вычисление топливно-временных параметров полёта;
• Формирование графической и текстовой информации для
выдачи на индикацию;
115.
3.8 FMS. Описание.Оборудование системы FMS:
• 5 цветных широкоформатный ЖКИ
диагональю 15,4” (окно CDU) ;
• Центральная интегрированная модульная
вычислительная система в
составе 6 центральных вычислителей и
сети передачи данных;
• 2 пульта трекбола;
• 2 пульта управления индикацией.
116.
3.8 FMS. Описание.Пилотажно‐навигационное оборудование, связанное с
FMS:
• 3 системы измерения высотно‐скоростных параметров
(СВС);
• 3 комплекта инерциальной навигационной системы (ИНС);
• 2 комплекта радиодальномера DME;
• 2 комплекта многорежимных приёмников навигации и
посадки с функциями ILS/GPS/GLS/VOR/MRK;
• 2 комплекта спутниковой навигационной системы
GPS/ГЛОНАСС.
117.
3.8 FMS. Описание.Навигация:
• В соответствии с ARINC 702 и ICAO Doc 9613:
o Непрерывное определение навигационных параметров на основании
вычисленных данных от различных навигационных средств (широта, долгота, высота,
скорость, угол сноса, путевой угол, магнитное склонение, скорость и направление ветра,
текущее время, требуемую и текущую точность навигации RNP);
o Обеспечение контроля целостности навигационной информации с
формированием сообщений о нарушении требований текущего этапа;
o Формирование наилучшего навигационного решения на основании точностных
характеристик навигационных средств (GNSS, DME, VOR, IRS, ADC, DR), поставляемых ими
данных и информации о текущих условиях. Решение обеспечивает минимизацию ошибки
определения текущих координат самолёта.
o Обеспечение навигации, основанной на характеристиках, в условиях RNP10, RNAV5,
RNAV2, RNAV1, RNP4, RNP1, Advanced RNP, RNP APCH, RNP AR APCH и MNPS.
o Выдача навигационных параметров внешним системам - потребителям.
118.
3.8 FMS. Описание.Самолётовождение:
• Формирование плана полёта:
o поддержка методов ручного ввода географических координат навигационных
точек, ввода идентификаторов навигационных точек, а также сопряжением
маршрутов или участков маршрута, содержащихся в навигационной базе данных
и запроса готового плана полёта у наземных служб (AOC и ATC) через Datalink;
o возможность добавления/редактирования/удаления навигационных точек в
составленном плане;
o возможность полёта по параллельным траекториям;
o возможность хранения до 4-х планов полёта с независимым редактированием;
o возможность использования всемирной навигационной базы данных, базы
данных авиакомпании и пользовательской базы данных;
o поддержка спецификации ARINC 424/424A на навигационную базу данных.
119.
3.8 FMS. Описание.Самолётовождение:
• Формирование и выдача информации для обеспечения автоматического
самолётовождения в горизонтальной и вертикальной плоскостях по
сформированному маршруту:
o с возможностью оптимизации по стоимости и затратам топлива (COST INDEX),
o используя базу аэродинамических данных о аэродинамических характеристиках
самолёта и данных по тяге и расходным характеристикам двигателей (PDB);
o действующего и запасных планов полёта (Alternate RTE);
o текущих и заданных параметров полёта;
o профиля ветра на маршруте.
• Определение времени полёта (ETE), расстояния до любого пункта
маршрута или аэродрома по плану полёта (ETA), остатка топлива в
любом пункте маршрута на выбранном или рекомендованном
оптимальном режиме полёта.
120.
3.8 FMS. Описание.Самолётовождение:
• Формирование вертикального плана полёта (VNAV):
o с использованием ограничений высоты/скорости из аэронавигационной базы данных
или введённых вручную, в том числе на режиме малого газа до первого ограничения;
o обеспечивающего вычисление и формирование для индикации скорости для
автоматического вывода самолёта в заданную точку в заданное время (RTA);
o обеспечивающего выдачу (дополнительной) информации о расстоянии,
времени и направлении относительно выбранного лётчиком навигационного
средства или ППМ.
• Расчёт взлётно-посадочных характеристик, в том числе параметров взлёта (в том числе
для режима с пониженной тягой) и посадки (V1,V2, VR, VREF) по
автоматически рассчитанным параметрам LРАЗБ, LПРЕРВ, LПРОДОЛЖ и LПОС.
• Формирование, индикацию и выдачу потребителям информации о текущем весе самолёта.
121.
3.8 FMS. Описание.Формирование информации для выдачи на МФИ:
• Выдача на МФИ сформированной по плану полёта траектории с учетом
требований сопряжения участков плана полёта в соответствии с
документом DO-236С, информации о ППМ, средствах коррекции, зонах
радиодиспетчерских служб (FIR/UIR), частотах связи, запретных зонах,
трассах, пересечениях (INTERSECTION), схемах маршрута вылета (SID),
схемах маршрутов прибытия (STAR), схемах захода на посадку (APPROACH);
• Формирование сообщений о смене режимов полёта и выдачу их на
индикацию;
• Выдача на индикацию текущего времени.
Реализация функций концепции CNS/ATM в части:
• авиационного оперативного контроля полёта (функция АОС) в целях УВД и
служб авиакомпаний.
122.
4. Принципы построения БРЭОсовременных летательных аппаратов:
Использование сетевой архитектуры, в которой БРЭО выполняется на
основе объединения унифицированных модулей различного
назначения в распределённую вычислительную сеть.
Использование интегрированной модульной авионики (ИМА):
интегрированная – различные приложения выполняются на единой
вычислительной платформе, строящейся на однотипных
конструктивно-функциональных модулях, которые могут быть легко
локально разнесены, например, с целью обеспечения
резервирования;
модульная – подразумевает набор стандартных, не функционально
ориентированных вычислителей, конфигурируемых таким образом,
чтобы обеспечить выполняющееся ПО частью своих ресурсов;
модулем может быть ПО, аппаратные средства или комбинация ПО
и аппаратных средств.
123.
4.1. Принципы использования интегрированноймодульной авионики (ИМА):
унификация модулей: универсальная модульность позволяет
нескольким приложениям делить и повторно использовать одни и
те же ресурсы вычислителя, что повышает его эффективность и
оставляет свободное пространство для будущих расширений;
абстрагирование ПО: приложения независимы не только от
интерфейсной, но и от аппаратной архитектуры БРЭО, а ПО
строится по модульному принципу, - это повышает уровень
мобильности приложений между разными платформами, и
оптимизирует трудозатраты, так как новые функции могут быть
интегрированы в систему без изменения уже существующего ПО;
повторное использование ПО: ИМА должна позволять повторное
использование ранее разработанного кода, – это сокращает время
разработки и позволяет использовать уже существующие
приложения без значительной модификации.
124.
4.2 Принципы построения комплекса функциональносвязанного оборудования на основе идеологии ИМА:Платформа ИМА (вычислительное ядро КБО)
Вычислительный модуль
ФПО-1
ФПО-2 ... ФПО-N
ОС РВ, СлПО
...
Исполнительное
устройство
Исполнительное
устройство
Исполнительное
устройство
...
Концентратор
(коммутатор)
Датчик
Датчик
Датчик
Концентратор
(коммутатор)
125.
5. Особенности военных самолётовПрименительно к авиации военного назначения
принципы ИМА получили развитие в идеологии
интегрированной модульной авионики боевых
комплексов - ИМА БК.
126.
5.1 Функциональные особенности интегрированноймодульной авионики боевых комплексов:
использование унифицированных модулей и однородной вычислительной
среды при формировании вычислительной сети (платформы ИМА БК)
БРЭО;
использование многоядерных процессоров высокой производительности
и модулей памяти большого объёма;
использование единого высокоскоростного интерфейса Fiber Channel
профиля Real Time с гарантированной доставкой сообщений реального
времени (FC-RT) для организации информационного обмена между
модулями и системами БРЭО;
использование операционной системы реального времени;
наличие независимой (автономной) подсистемы мониторинга и
управления, дающей возможность гибкой динамической реконфигурации
вычислительного кластера при возникновении аварийных ситуаций и
аппаратных неисправностей, при отказах модулей и линий связи.
127.
5.2. Вычислительная сеть ивычислительное ядро БРЭО ЛА
Вычислительное ядро ИМА БРЭО реализуется на основе
нескольких однотипных резервированных вычислителей
(однотипных вычислительных модулей), на каждом из
которых выполняется определённый набор программных
приложений, распределённый таким образом, чтобы
удовлетворять всем требованиям функционального
назначения и требованиям по отказобезопасности
бортового оборудования.
Также в вычислительное ядро входят несколько
коммутаторов высокоскоростного интерфейса (например,
FC), выполняющих функции маршрутизаторов
вычислительной сети, построенной по принципу
двукратного (или более) резервирования.
128.
5.2. Вычислительная сеть ивычислительное ядро БРЭО ЛА
129.
5.3 Функции вычислительного ядра ЛА:Вычислительное ядро является основным источником и
потребителем данных для обеспечения выполнения следующих
функций авиационного комплекса:
сбор первичных данных по различным интерфейсам (линиям связи),
их обработка и последующая передача потребителям;
выдача управляющих команд в комплексы силового (двигатель) и
общесамолётного (гидравлика, пневматика, охлаждение, свет и т.п.)
оборудования;
информирование обслуживающего персонала (на земле) и экипажа (в
полёте) обо всех бортовых ситуациях, требующих человеческого
внимания и участия (например, предупреждение об отказах и
угрозах) посредством выдачи текстовых сообщений, звуковых и
речевых предупреждений, световой сигнализации;
формирование и вывод на пилотажные индикаторы информации
(текстовой, графической, видео-) от самолётных систем.
130.
Пример индикационного обеспечения экипажаинформацией – кадры ПИЛ и КИС «Двигатель + Шасси»
МФИ ПАК ФА Т-50 (кадр из передачи телеканала «Звезда»)
131.
5.4. Информационно-управляющаясистема летательного аппарата
Информационно-управляющая система (ИУС) – это система верхнего
уровня в составе БРЭО, обеспечивающая взаимодействие между
экипажем и авиационным комплексом, а также функциональную и
информационную интеграцию систем и средств БРЭО,
общесамолётного оборудования и полезной нагрузки при решении
задач в полёте, при целевом применении, а также при техническом
обслуживании на земле.
В состав ИУС могут входить резервированные вычислители (БЦВМ),
многофункциональные индикаторы, пульты-индикаторы,
коллиматорные авиационные индикаторы, блоки преобразования
телевизионных видео-сигналов, блоки-концентраторы сигналов,
внешние запоминающие устройства и серверы данных.
При этом функциональные (вычислительные) модули входят в состав
и являются основой вычислительного ядра.
132.
5.5 Функциональные задачи, решаемые ИУС:комплексная обработка информации, получаемой от информационных систем и средств
БРЭО, ОСО и СУ;
обработка и расчёт параметров для решения задач навигации и самолётовождения, а также
целевых задач по назначению ЛА;
обеспечение информационного взаимодействия (обмена данными) всех систем самолёта;
централизованное управление блоками ИУС, системами и средствами БРЭО, а также ОСО и
СУ;
формирование и выдача управляющих команд на средства оповещения экипажа,
регистрации и в исполнительные системы;
обеспечение информационной поддержки экипажа на всех этапах полёта и целевого
применения, включая контроль и оценку принимаемых решений и действий, в том числе на
этапах обучения;
контроль функционирования и анализ технического состояния всех самолётных систем в
режимах автоматического текущего контроля и расширенного автоматизированного
наземного контроля.
133.
5.6. Система отображения информацииСистема отображения информации предназначена для
приёма, преобразования и представления экипажу
информации, необходимой для выполнения полётного
и целевого заданий, её запаковки и регистрации, а
также для выдачи в вычислительное ядро и системы
КБО команд экипажа.
В состав системы отображения информации могут
входить:
многофункциональный индикатор (МФИ);
многофункциональный пульт-индикатор (МФПИ);
коллиматорный авиационный индикатор (КАИ,
ШКАИ).
134.
5.6 Система отображения информации135.
6. Системы, использующие ресурсывычислительного ядра ЛА
Системы, обеспечивающие решение задач по назначению с
использованием вычислительных ресурсов ядра (сети) ЛА:
радиосвязные системы (включая аварийные радиомаяки);
пилотажно-навигационное оборудование;
системы поиска целей и мониторинга окружающей обстановки;
запросчики и ответчики системы управления воздушным
движением;
системы обеспечения электромагнитной совместимости;
системы регистрации информации и объективного контроля
системой световой сигнализации;
система управления оружием;
устройство выброса помех.
136.
6. Системы, использующие ресурсывычислительного ядра ЛА
органы оперативного управления (ООУ) на РУС и РУД;
Общесамолётные системы и системы управления
силовой установкой:
• комплексная система управления;
• система кондиционирования воздуха;
• система обогрева лобового стекла;
• топливная системой;
• система уборки/выпуска и формирования сигналов
о положении шасси;
• комплекс средств аварийного покидания;
• система энергоснабжения;
137.
6. Системы, использующие ресурсывычислительного ядра ЛА
система противообледенения;
Система управления агрегатами силовой
установки;
система обеспечения жизнедеятельности экипажа;
системы охлаждения;
пульт управления двигателем;
система пожарной защиты;
вспомогательная силовая установка;
система контроля параметров шасси.
138.
7. Распространённые интерфейсыПод интерфейсом понимают совокупность физических и
логических принципов взаимодействия компонентов технических
систем, то есть совокупность правил, алгоритмов и временнЫх
соотношений по обмену данными между этими компонентами
(логический интерфейс), а также совокупность физических,
механических и функциональных характеристик средств
подключения, реализующих такое взаимодействие (физический
интерфейс).
Если внутри блоков часто используют стандартные
общепромышленные интерфейсы, то для взаимодействия систем в
комплексах авионики они, как правило, не применяются.
139.
7. Распространённые интерфейсыОсобые требования, предъявляемые к интерфейсам на борту ЛА:
работа в реальном масштабе времени;
высокая помехоустойчивость и электромагнитная
совместимость;
устойчивость к отказам – разрыв, замыкание, отказ
устройства не должен приводить к отказу интерфейса;
детерминизм – задержка передачи информации должна
быть предсказуема и невелика;
работа в неблагоприятных внешних условиях
(температуры, вибрация, удары, излучения);
возможность контроля текущего состояния в любой
момент времени;
простота технического обслуживания;
лёгкость изменения состава и конфигурации устройств.
140.
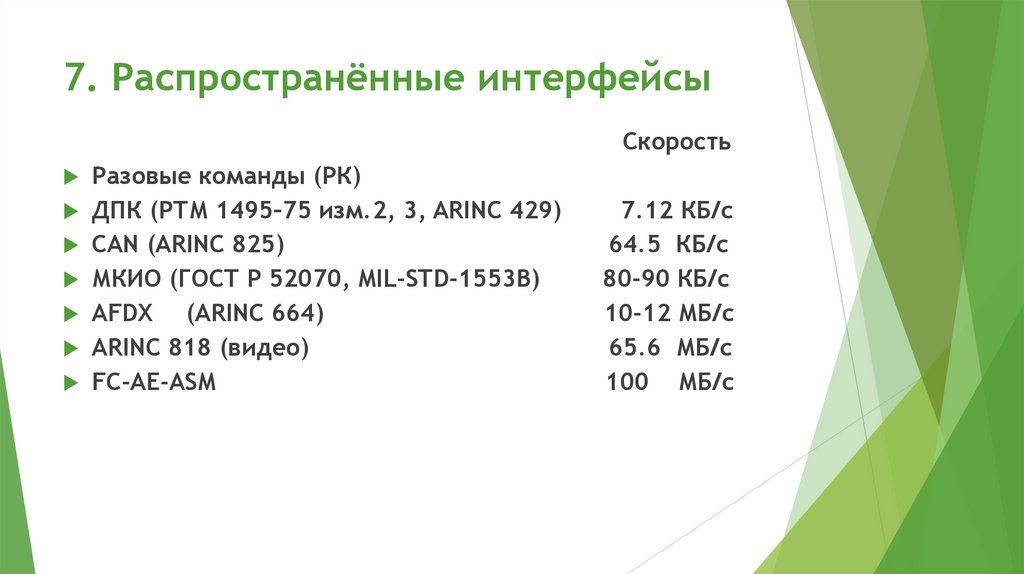
7. Распространённые интерфейсыСкорость
Разовые команды (РК)
ДПК (РТМ 1495–75 изм.2, 3, ARINC 429)
CAN (ARINC 825)
МКИО (ГОСТ Р 52070, MIL-STD-1553B)
AFDX
(ARINC 664)
ARINC 818 (видео)
FC-AE-ASM
7.12 КБ/c
64.5 КБ/c
80-90 КБ/с
10-12 МБ/c
65.6 МБ/c
100 МБ/c
141.
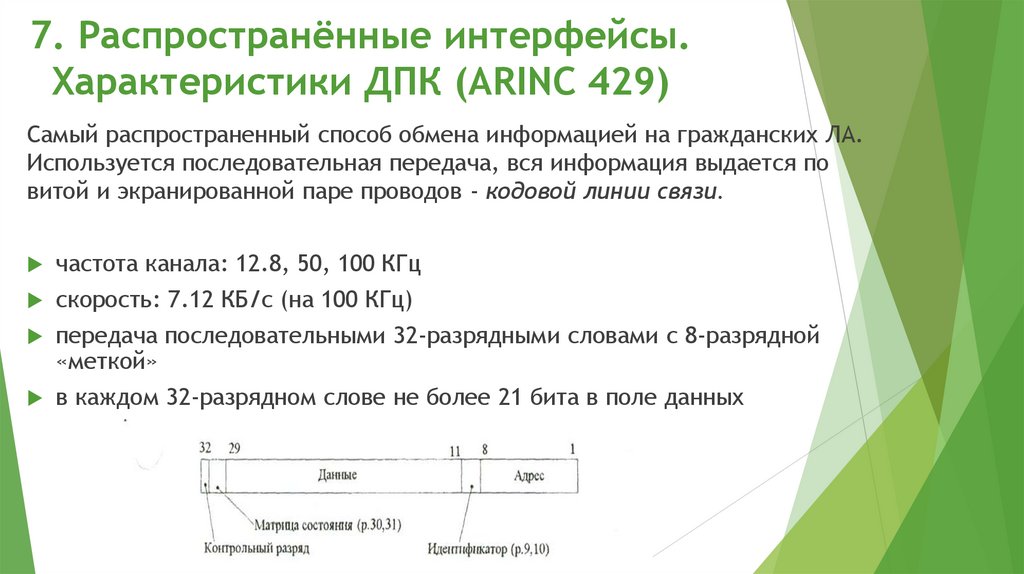
7. Распространённые интерфейсы.Характеристики ДПК (ARINC 429)
Самый распространенный способ обмена информацией на гражданских ЛА.
Используется последовательная передача, вся информация выдается по
витой и экранированной паре проводов - кодовой линии связи.
частота канала: 12.8, 50, 100 КГц
скорость: 7.12 КБ/с (на 100 КГц)
передача последовательными 32-разрядными словами с 8-разрядной
«меткой»
в каждом 32-разрядном слове не более 21 бита в поле данных
142.
7. Распространённые интерфейсы.CAN (ARINC 825) Controller area network
Основные особенности CAN:
Много абонентов с двусторонней связью
Широковещательная и двусторонняя связь со всеми
абонентами
Короткие сообщения (от 0 до 8 байт в кадре от 64 до 128 бит)
Определение ошибок связи и сигнализация о них
Наличие контроллера сети (передаёт только один абонент,
который должен дождаться разрешения на передачу,
остальные - принимают)
Скорость передачи: 83.333 kbit/s, 125 kbit/s, 250 kbit/s, 500
kbit/s, 1000 kbit/s.
143.
7. Распространённые интерфейсы. Мультиплексный канал информационногообмена (МКИО, MIL-STD-1553B)
Широкое распространение и длительность
использования связана со следующими достоинствами:
Линейная топология
Надёжность
Детерминизм
Высокая устойчивость к отказам
Поддержка неинтеллектуальных терминалов
Широкая доступность компонентов
частота канала: 1 МГц
скорость: 80-90 КБ/с
до 32 16-разрядных слов в одном обмене
централизованное управление
возможность широковещания
144.
7. Распространённые интерфейсы. AFDX (АRINC 664 part7)- БОРТОВАЯ СЕТЬ ДУПЛЕКСНОЙ ПЕРЕДАЧИ ДАННЫХ
Достоинства те же, что и для МКИО.
частота канала:
скорость:
1-100 МГц
100 Мбит/с
передача сообщениями до
64 КБ, по
умолчанию длина сообщения - 576 байт.
145.
7. Распространённые интерфейсы.ARINC 818 (видео) AVIONICS DIGITAL VIDEO
BUS (ADVB) HIGH DATA RATE
Достоинства те же, что и для FC (FC может
быть использован для передачи
видеосигнала).
частота канала: 1062 МГц
скорость: 65,6 МБ/с
передача сообщениями до 16 Мбайт
в каждом сообщении 32-разрядные слова
146.
7. Распространённые интерфейсы. Fibre ChannelFibre Channel(FC) описывают более 20 стандартов АNSI. Часть из
них уже принята, остальные циркулируют в виде проектов.
Обеспечивается высокая скорость передачи, в то же время
скорость может масштабироваться в широких пределах в
зависимости от конкретной ситуации - от 133 Мбит/с до 4 Гбит/с.
Наряду с высокой скоростью FC также может обеспечить
гарантированную доставку информации с малой задержкой,
что крайне важно для авиационных приложений,
работающих в реальном масштабе времени.
частота канала: 1062 МГц
скорость: 100 МБ/с
передача сообщениями до 16 Мбайт
в каждом сообщении 32-разрядные слова