


 industry
industrySimilar presentations:










Цифроаналоговые системы автоматического управления траекторным движением
1. 5.2. Цифроаналоговые САУ.
5.2. ЦИФРОАНАЛОГОВЫЕ САУ.ЛЕКЦИЯ № 18 Цифроаналоговые системы
автоматического управления траекторным
движением
2.
5.11. Цифроаналоговые системы автоматическогопродольным траекторным движением на маршруте.
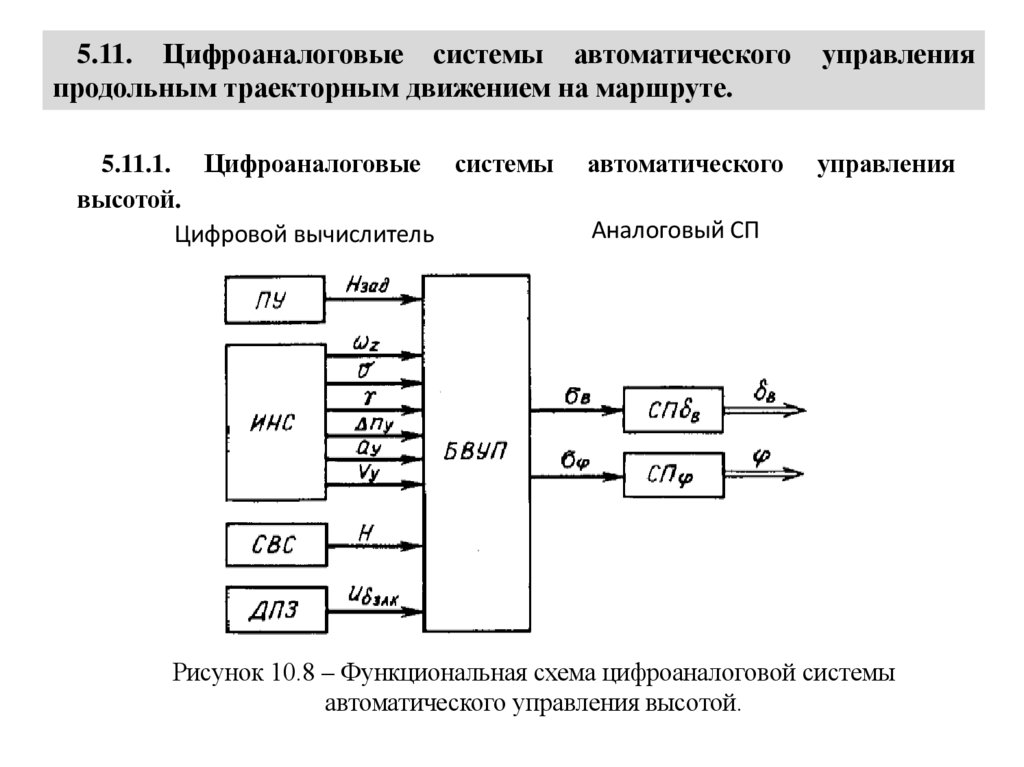
5.11.1. Цифроаналоговые системы
высотой.
Цифровой вычислитель
автоматического
управления
управления
Аналоговый СП
Рисунок 10.8 – Функциональная схема цифроаналоговой системы
автоматического управления высотой.
3.
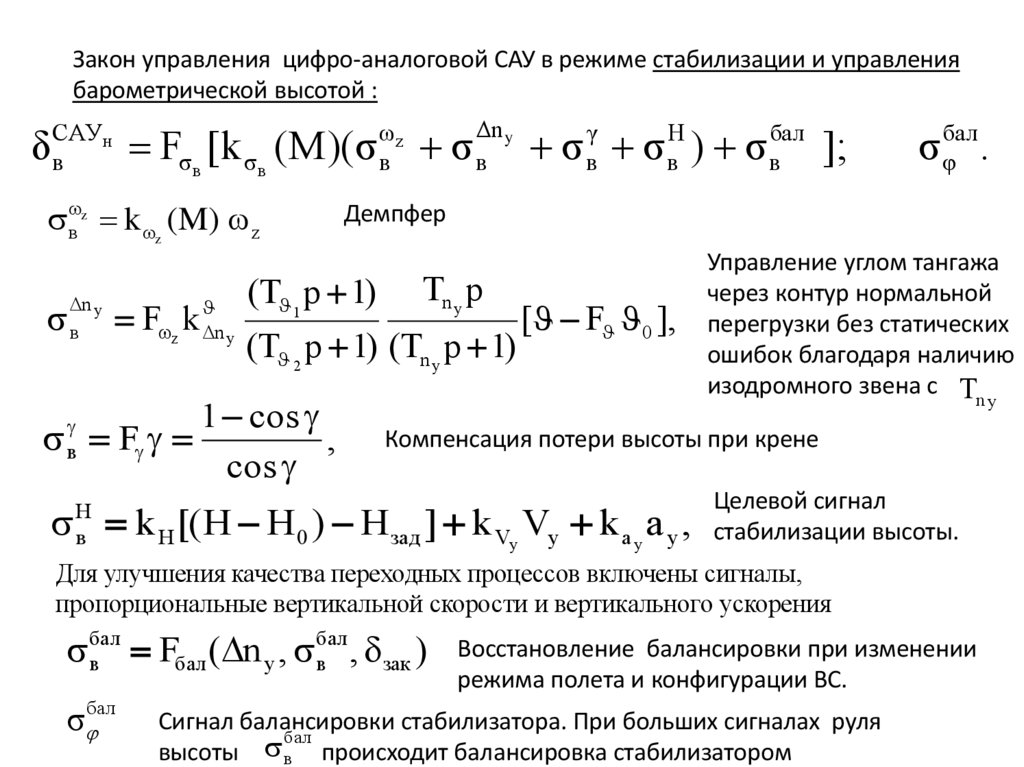
Закон управления цифро-аналоговой САУ в режиме стабилизации и управлениябарометрической высотой :
δ
Fσв [k σв (M)(σ
САУ н
в
в z k z (M) z
n y
в
F z k
n y
σ
Δn y
в
σ σ ) σ
γ
в
H
в
бал
в
];
бал
φ
σ .
Демпфер
(T 1 p 1)
Tn у p
(T 2 p 1) (Tn у p 1)
1 cos
F
,
cos
в
ωz
в
[ F 0 ],
Управление углом тангажа
через контур нормальной
перегрузки без статических
ошибок благодаря наличию
изодромного звена с Tn
у
Компенсация потери высоты при крене
k H [(H H 0 ) H зад ] k Vy Vy k a y a y ,
H
в
Целевой сигнал
стабилизации высоты.
Для улучшения качества переходных процессов включены сигналы,
пропорциональные вертикальной скорости и вертикального ускорения
бал
бал
F
(
n
,
в
бал
y
в , зак )
σ бал
Восстановление балансировки при изменении
режима полета и конфигурации ВС.
Сигнал балансировки стабилизатора. При больших сигналах руля
бал
высоты в происходит балансировка стабилизатором
4.
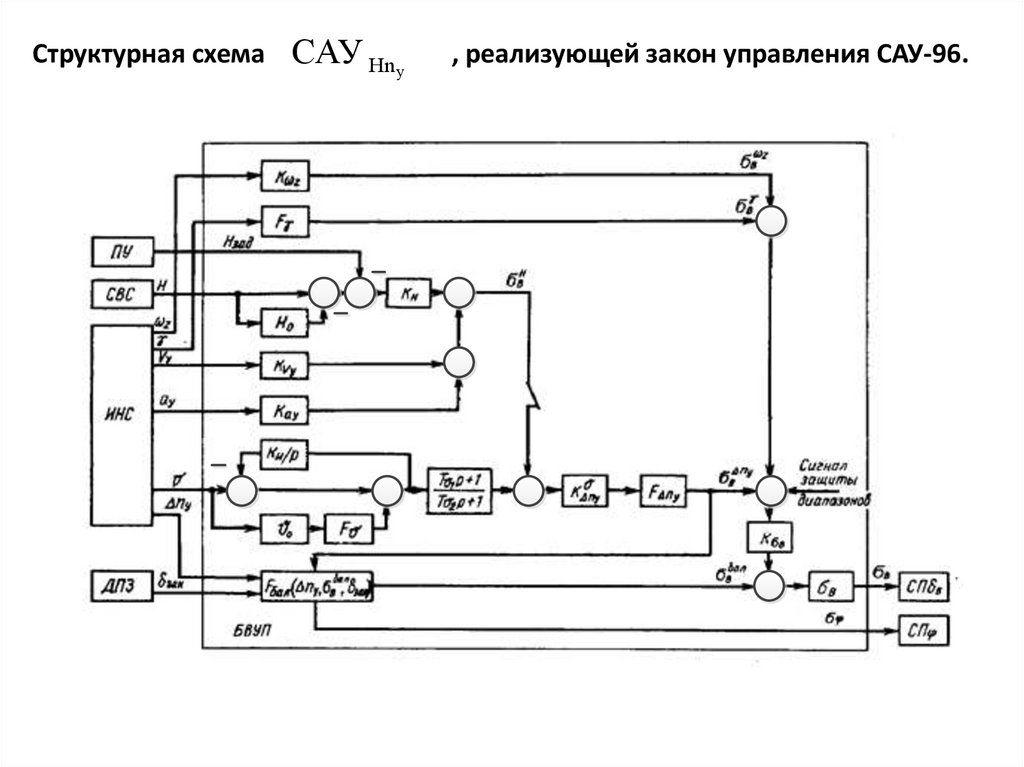
Структурная схемаСАУ Нn y
, реализующей закон управления САУ-96.
5.
5.11.2. Влияние отказов на качество управления.Пассивные и активные отказы в контуре сервопривода и тангажа по последствиям
аналогичны соответствующим отказам автопилота угла тангажа , а также приводят к
отключению режима автоматической стабилизации и управления высотой.
Пассивный отказ по сигналу угла тангажа приводит к потере демпфирования продольных
траекторных колебаний самолета по высоте.
Пассивный отказ по сигналу отклонения самолета от заданной высоты приводит к потере
Отказ по цепи согласования текущей высоты и получения опорного значения высоты
может сопровождаться грубым включением режима с недопустимо большими
отклонениями рулей высоты.
Погрешность измерения угловой скорости, угла тангажа и высоты приводит к
возникновению ошибок стабилизации высоты. величиной до 50 метров.
Зона нечувствительности сервопривода руля высоты, приведенная к углу тангажа и
составляющая до , приводит к статическим ошибкам по высоте до 30м.
Таким образом, суммарная погрешность стабилизации высоты с помощью САУ Н может
достигать десятков метров.
Разрегулировки передаточных коэффициентов закона управления снижают качество
переходных процессов и точность управления.
6. 5.12. Цифроаналоговые системы автоматического управления боковым траекторным движением самолета на маршруте.
7.
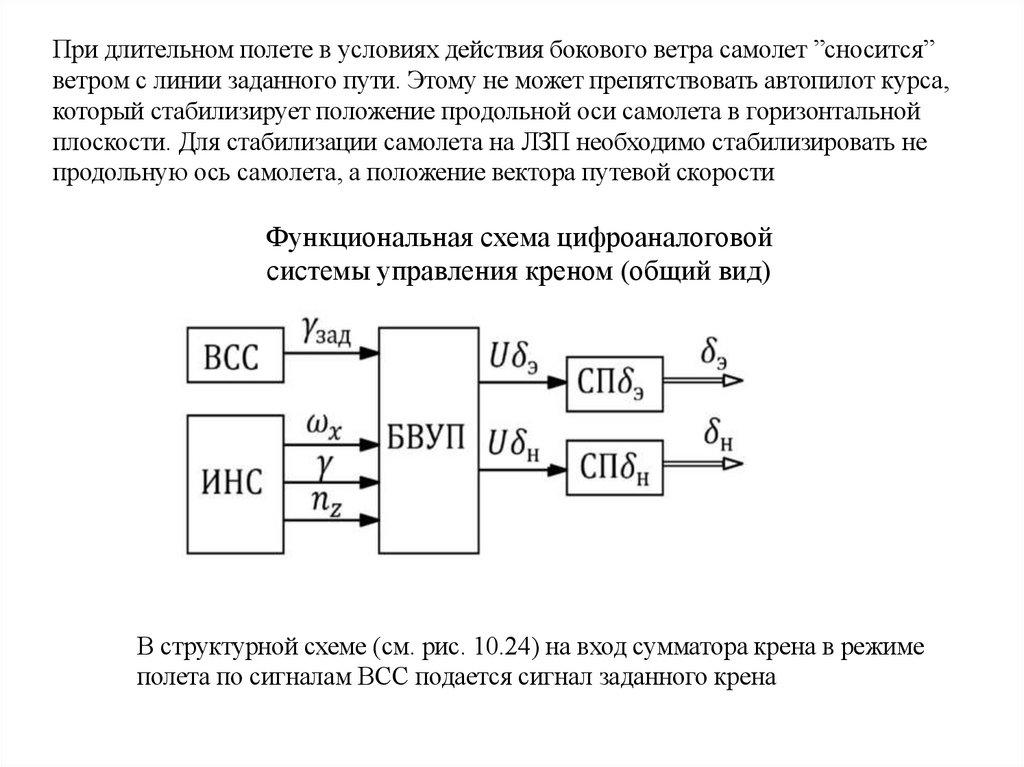
При длительном полете в условиях действия бокового ветра самолет ”сносится”ветром с линии заданного пути. Этому не может препятствовать автопилот курса,
который стабилизирует положение продольной оси самолета в горизонтальной
плоскости. Для стабилизации самолета на ЛЗП необходимо стабилизировать не
продольную ось самолета, а положение вектора путевой скорости
Функциональная схема цифроаналоговой
системы управления креном (общий вид)
В структурной схеме (см. рис. 10.24) на вход сумматора крена в режиме
полета по сигналам ВСС подается сигнал заданного крена
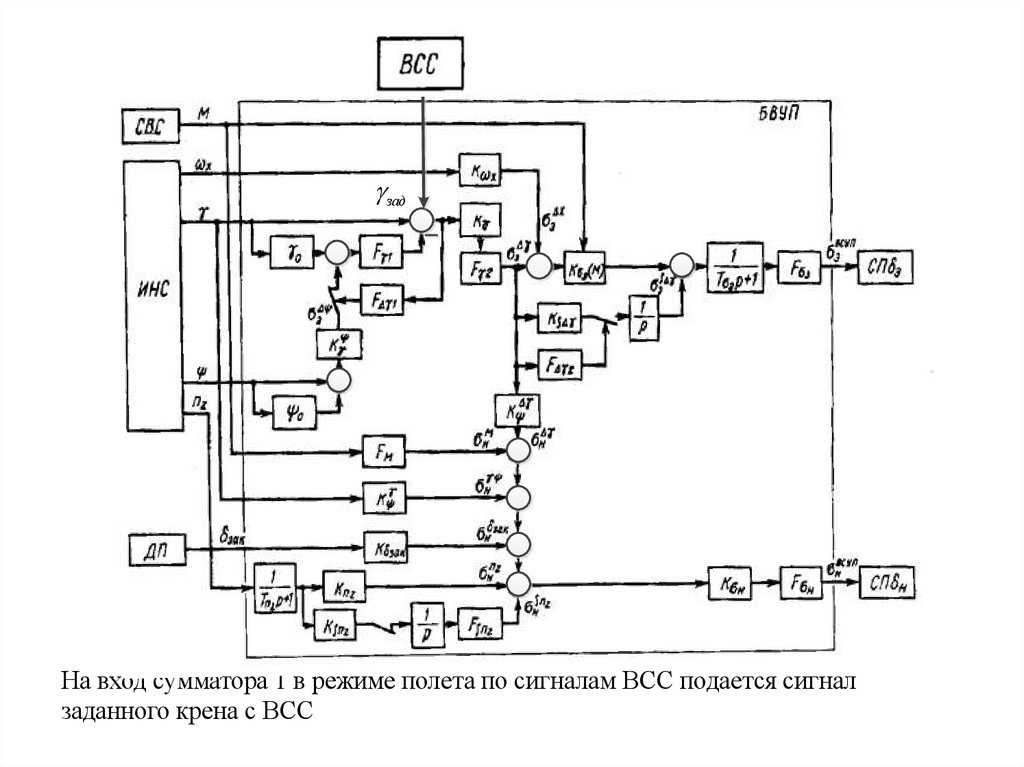
8.
1задНа вход сумматора 1 в режиме полета по сигналам ВСС подается сигнал
заданного крена с ВСС
9.
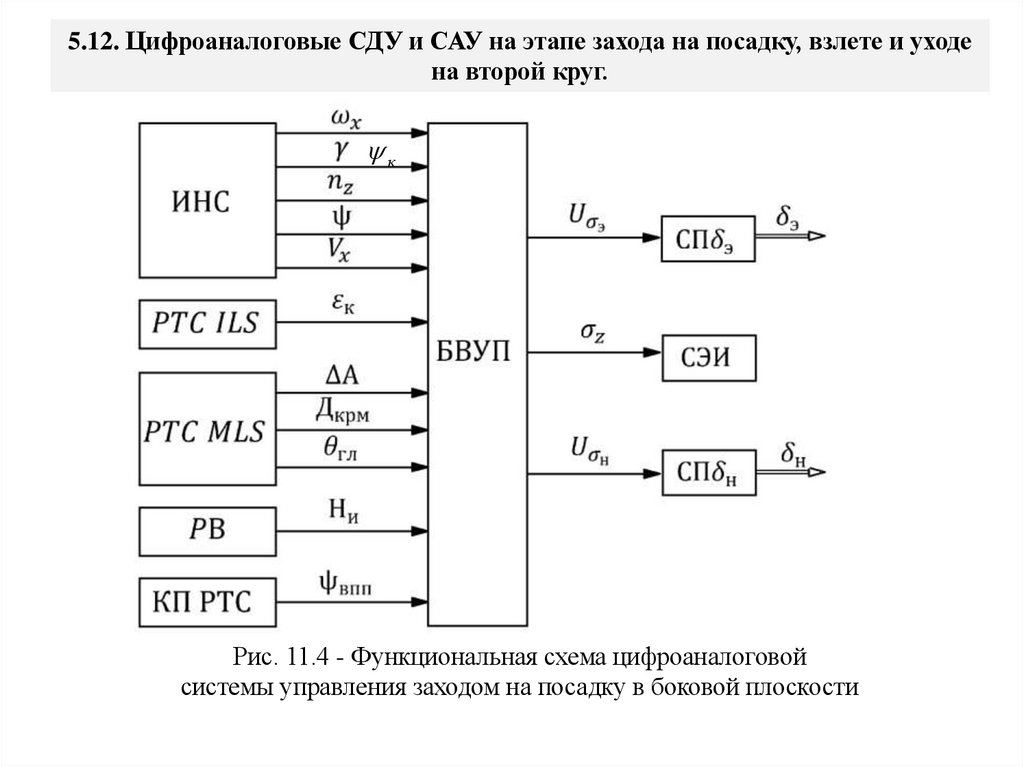
5.12. Цифроаналоговые СДУ и САУ на этапе захода на посадку, взлете и уходена второй круг.
5.11.1. Боковой канал при заходе на посадку.
к
Рис. 11.4 - Функциональная схема цифроаналоговой
системы управления заходом на посадку в боковой плоскости
10.
Используются :Сигналы инерциальной навигационной системы ИНС, пропорциональные угловой
скорости крена, углу крена, текущему курсу, путевому углу, продольной
составляющей путевой скорости.
С радиотехнической системы инструментальной посадки РТС СП/ILS поступает
сигнал, пропорциональный угловому отклонению самолета от равносигнальной
линии курса к
С радиотехнической системы микроволновой системы посадки РТС MLS
принимаются сигналы, пропорциональные отклонению от азимута A
и
дальности Dкрм до курсового радиомаяка, а также углу наклона глиссады гл .
Радиовысотомер выдает сигнал, пропорциональный истинной высоте полета H и
С комплексного пульта радиотехнических систем КП РТС поступает сигнал,
пропорциональный заданному путевому углу взлетно-посадочной полосы
впп
Формирование законов управления элеронов и рулей направления в режиме
автоматического управления, а также закона управления командным индексом в
режиме директорного управления осуществляется в цифровом блоке вычислителя
управления полетом БВУП.
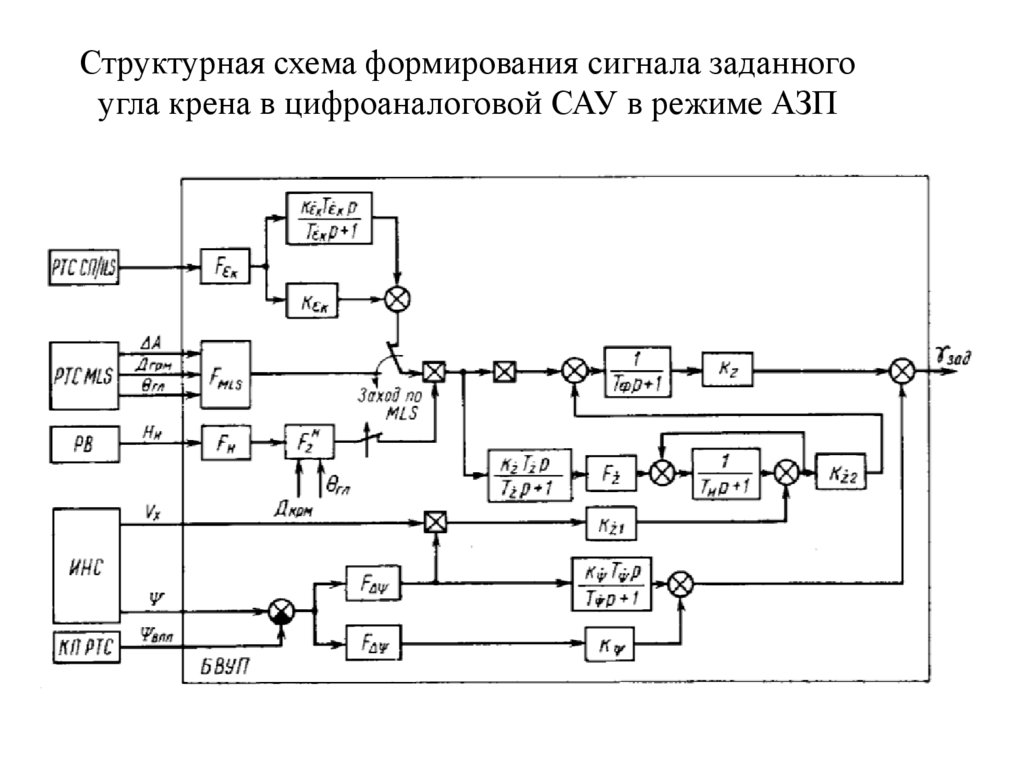
11.
Структурная схема формирования сигнала заданногоугла крена в цифроаналоговой САУ в режиме АЗП
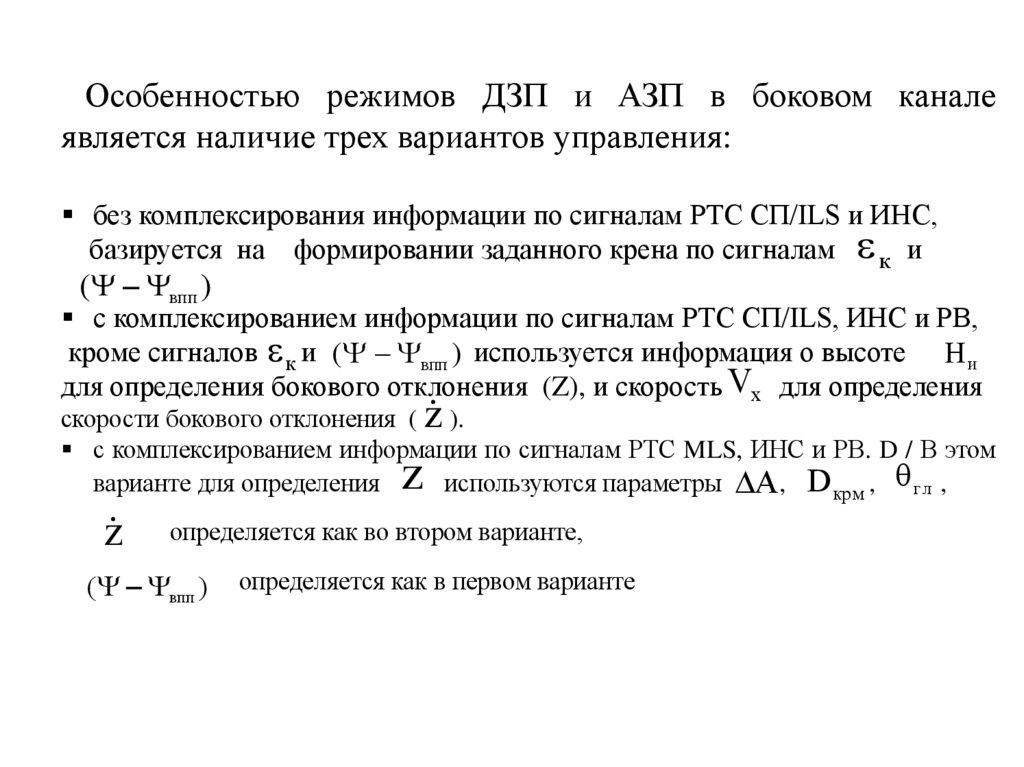
12.
Особенностью режимов ДЗП и АЗП в боковом каналеявляется наличие трех вариантов управления:
без комплексирования информации по сигналам РТС СП/ILS и ИНС,
базируется на формировании заданного крена по сигналам к и
( впп )
с комплексированием информации по сигналам РТС СП/ILS, ИНС и РВ,
кроме сигналов к и ( впп ) используется информация о высоте Н и
для определения бокового отклонения (Z), и скорость Vx для определения
z
скорости бокового отклонения ( ).
с комплексированием информации по сигналам РТС MLS, ИНС и РВ. D / В этом
варианте для определения
используются параметры A , D крм , гл ,
z
z
определяется как во втором варианте,
( впп )
определяется как в первом варианте
13.
5.13. Функциональная схема цифроаналоговойсистемы управления заходом на посадку в продольной плоскости
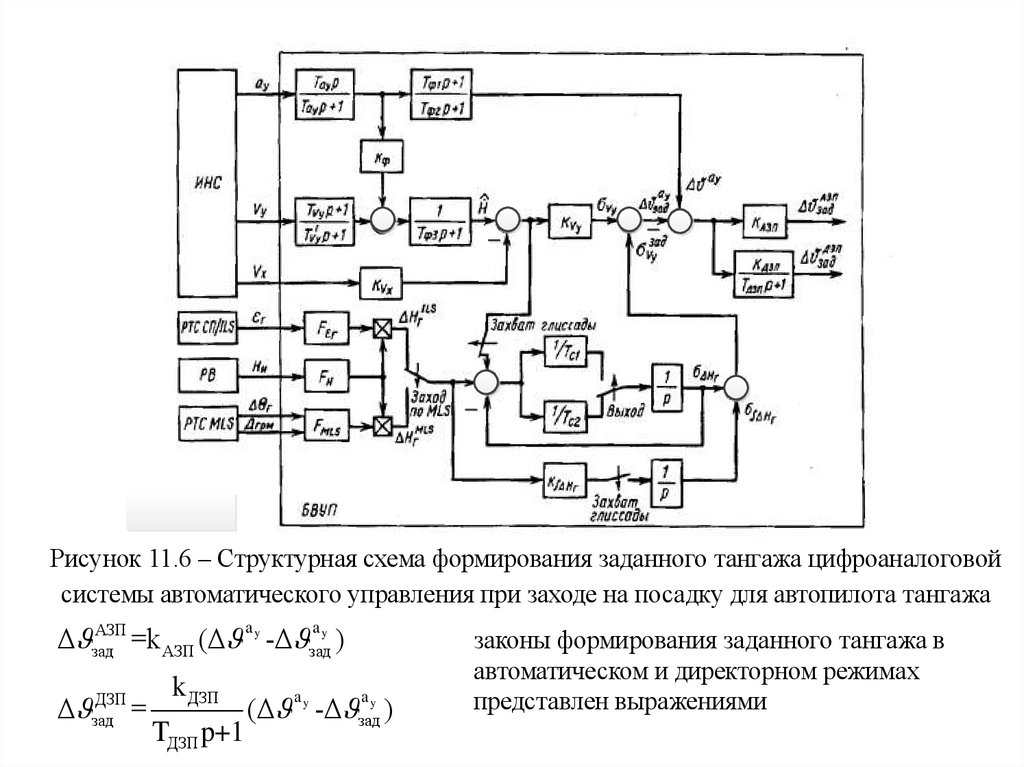
14.
Рисунок 11.6 – Структурная схема формирования заданного тангажа цифроаналоговойсистемы автоматического управления при заходе на посадку для автопилота тангажа
АЗП
Δ зад
=k АЗП (Δ y -Δ задy )
a
Δ
ДЗП
зад
=
k ДЗП
TДЗП p+1
a
(Δ y -Δ задy )
a
a
законы формирования заданного тангажа в
автоматическом и директорном режимах
представлен выражениями
15.
5.14. Цифроаналоговые САУ и AT при работе на этапе взлета и ухода навторой круг.
Режим ухода на 2-й круг предусмотрен в вычислительных системах
управления полетом ВСУП и тягой ВСУТ. При формировании законов
управления дополнительно учитываются приращения продольной перегрузки,
скорость перемещения стабилизатора, количество исправных двигателей.
Минимизация
просадки
обеспечивается
высоким
быстродействием.
Соблюдаются ограничения по углу атаки и нормальной перегрузке. Ограничение
по приращению продольной перегрузки обеспечивает выдерживание темпа
разгона при разном положении механизации крыла. В боковом канале
формируется заданное значение угла крена для отработки элеронами и рулями
направления. При отказе двигателя снимается постоянно действующий внешний
момент путем отклонения рулей направления пропорционально интегралу от
несимметричности тяги.