






; или скалярно x = x(t); y")

 точка над символом обозначает производную по времени.")



")



.")

.")






")






 и период (время одного")





: 1) Пространство Евклидово (т.е. описывается аксиомами")
 Закон всемирного тяготения выполняется для всей известной для нас вселенной; 5) Изменение всех полей со скоростью света; 6)")

: 1)")
 Сильное или ядерное взаимодействие (связь частиц в атомном ядре); 4) Слабое взаимодействие (процессы распада элементарных")
. Всякое тело находится в состоянии покоя или равномерного и прямолинейного движения, пока")


. Центр масс")














 называют векторное произведение радиус-вектора и вектора силы Величина ℓ =")











:")


: здесь F = kx – внешняя")



, то эта энергия будет потрачена на преодоление потенциального")
.")


 Это силы, работа которых не зависит от пути, по которому тело переходит из одного положения в другое;")


 можно найти силу, действующую на частицу в каждой точке поля угол α – угол между вектором силы и вектором")



, называются потенциальными, градиент этой функции")
 = – U(x, y, z).")




, то полная механическая энергия уменьшается.")


 physics
physicsSimilar presentations:
")






")

")
Механическое движение. Система отсчёта. Ускорение. Тангенциальное и нормальное ускорения
1. Механика. Элементы кинематики
1111
2. ВОПРОСЫ 1. Механическое движение. Система отсчёта. Средняя и мгн. скорости. 2. Ускорение. Тангенциальное и нормальное
ускорения.3. Уравнение кинематики
поступательного равнопеременного
движения (вывод).
4. Движение материальной точки по
окружности. Угловая скорость и
угловое ускорение.
111
2
3.
1113
4. Вопрос № 1. Механическое движение. Система отсчёта. Материальная точка. Траектория. Перемещение и путь. Средняя и мгновенная
скорости.111
4
5. Кинематика изучает законы движения тел. Материальная точка – модель тела, размерами которого можно пренебречь, по сравнению с
расстояниями в задаче.Механическое движение –
изменение положения тела с
течением времени относительно
других тел.
111
5
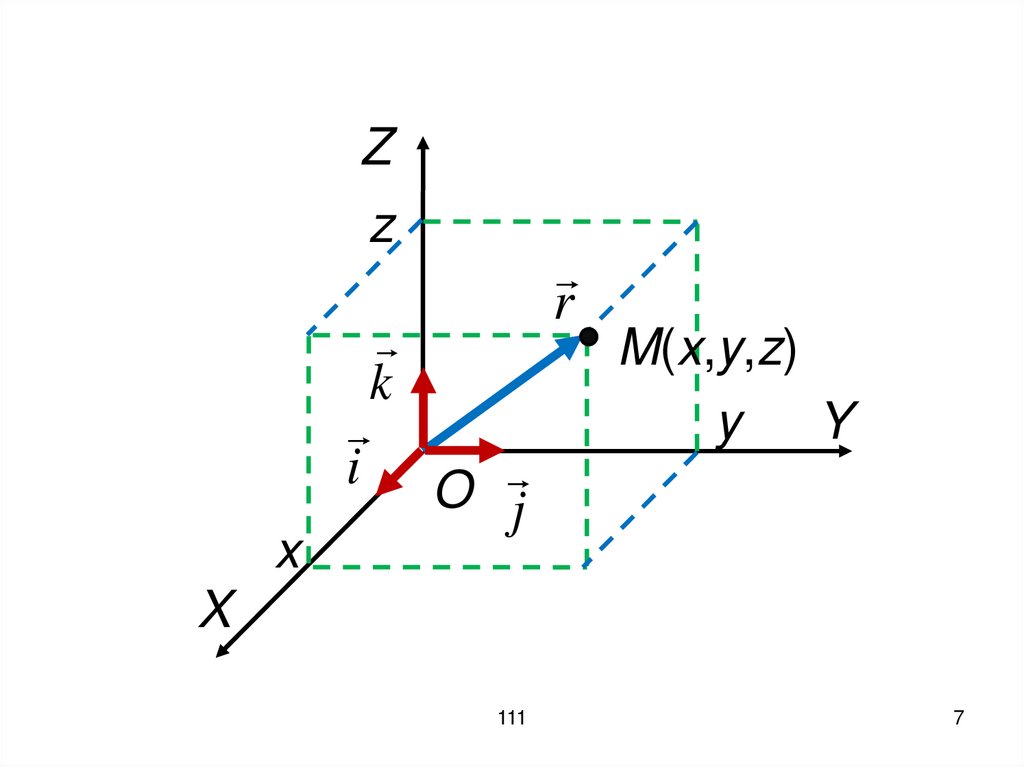
6. Система отсчёта – тело отсчёта, система координат, часы. Декартова система отсчёта в Евклидовом пространстве (пространство, в
которомвыполняются аксиомы геометрии).
Положение тела задаётся через
радиус-вектор r или через
координаты (x, y, z) (численно равны
проекциям радиус-вектора).
111
6
7.
Zz
x
k
i O
j
r
M(x,y,z)
y Y
X
111
7
8. Здесь i, j, k, – единичные ортогональные вектора, направленные вдоль осей x, y, z, соответственно. Вектор r, также может быть
представлен в видепроизведения величины | r | (модуль
вектора) и направления – er
(единичный вектор, который задаёт
направление).
111
8
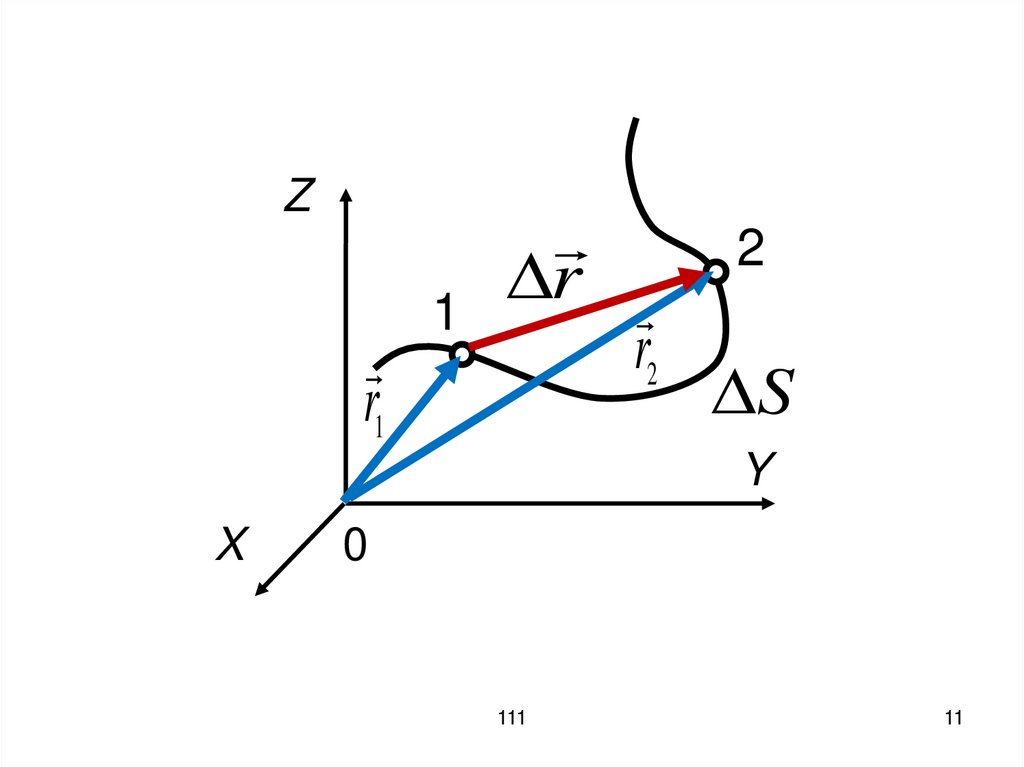
9. Траектория – линия, вдоль которой движется тело. Путь – расстояние, которое проходит тело по траектории. Скалярная величина,
которая характеризуетсятолько величиной – модулем.
Перемещение – вектор,
направленный из начальной точки в
конечную, характеризуется модулем
и направлением.
111
9
10. Так как тело может менять положение, то положение задают в зависимости от времени: векторно r = r (t); или скалярно x = x(t); y
= y(t);z = z(t).
111
10
11.
Z2
r
1
r2
S
r1
Y
X
0
111
11
12. Изменение положения с течением промежутка времени Δt характеризуют скоростью. Средняя скорость (по пути и по перемещению,
соответственно)S
r
ср
ср
t
t
111
12
13. Мгновенная скорость (по пути и по перемещению, соответственно) точка над символом обозначает производную по времени.
Мгновенная скорость (по пути и поперемещению, соответственно)
S dS
м lim
S,
t 0
t dt
r dr
м lim
r
t 0
t dt
точка над символом обозначает
производную по времени.
111
13
14. Здесь dS, dr, dt – дифференциал, очень малое изменение величины – приращение (ещё может быть очень малая доля некоторой
величины),dS / dt, dr / dt – производная, она
показывает изменение одной
величины в зависимости от другой.
111
14
15.
11115
16. Вопрос № 2. Ускорение. Тангенциальное и нормальное ускорения.
11116
17. Изменение скорости характеризуют ускорением. Среднее ускорение
aсрt
aср
t
111
17
18. Мгновенное ускорение (по пути и по перемещению, соответственно)
d d Saм lim
S
,
2
t 0
t dt dt
2
d d r
aм lim
r
2
t 0
t
dt dt
2
111
18
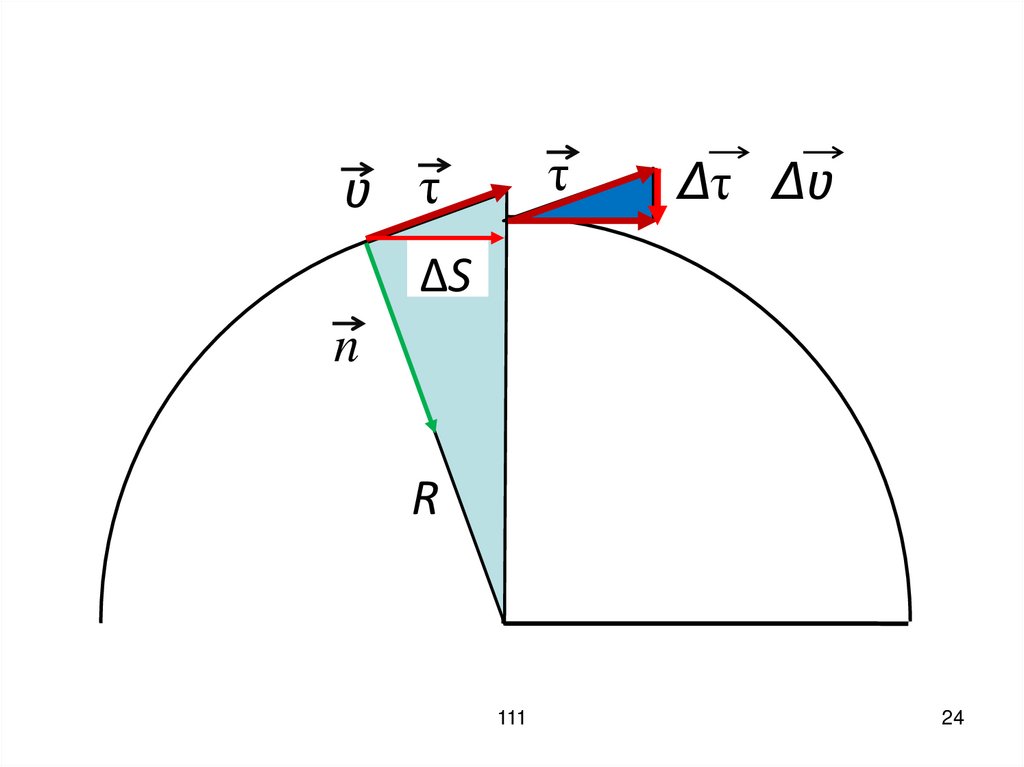
19. Выделим на траектории бесконечно малый участок dS, который можно заменить дугой окружности с радиусом R. Отметим также вектора
τ – единичный вектор, направленныйпо касательной к траектории,
n – единичный вектор, направленный
по радиусу R к центру окружности.
111
19
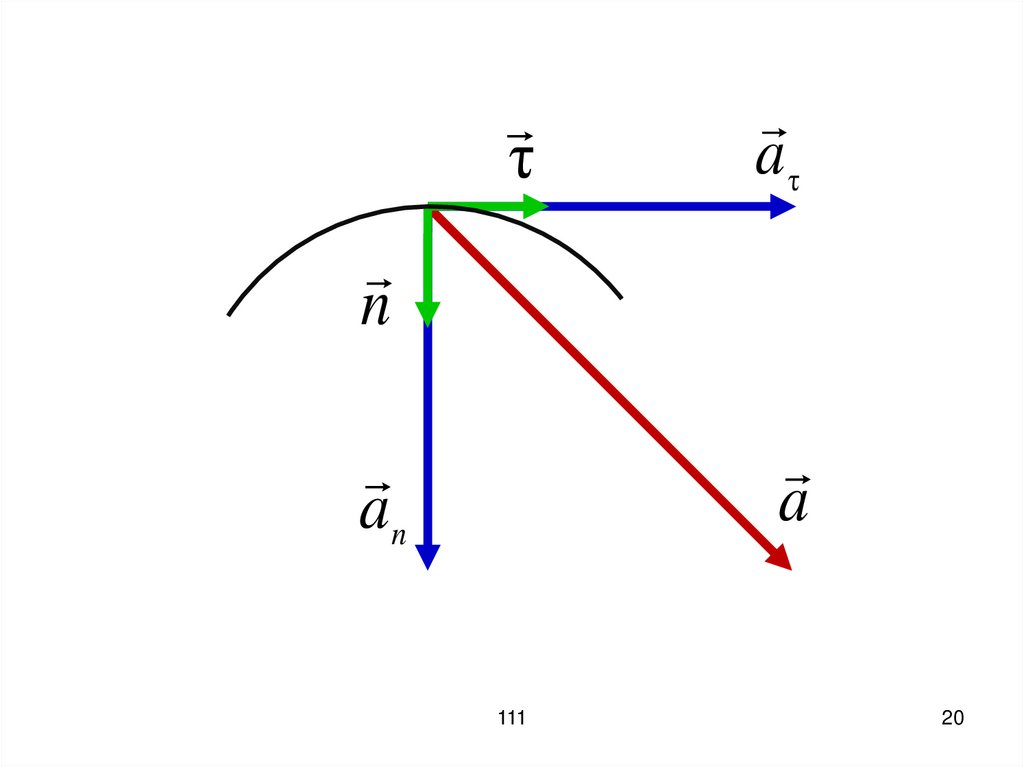
20.
τaτ
n
a
an
111
20
21. Скорость представим в виде тогда ускорение можно записать следующим образом
Скорость представим в видеτ
тогда ускорение можно записать
следующим образом
d d τ
a
τ τ aτ an
dt
dt
111
21
22. Нормальное ускорение, направлено по нормали к траектории, изменяет направление движения Тангенциальное ускорение, направлено по
Нормальное ускорение, направленопо нормали к траектории, изменяет
направление движения
2
an τ
n
R
Тангенциальное ускорение,
направлено по касательной к
траектории, изменяет модуль
скорости
d
a τ
τ
dt
111
22
23. Рассмотрим на рисунке два подобных треугольника, с катетами R, ΔS и τ, Δτ (или ʋ, Δʋ).
11123
24.
τʋ τ
Δτ Δʋ
ΔS
n
R
111
24
25. В пределе Δt → 0 Поделим на промежуток времени dt и преобразуем или
dτ dSτ S
В пределе Δt → 0
τ
R
τ
R
Поделим на промежуток времени dt
и преобразуем
dτ dS
dτ
dS τ
τ
τ
τdt Rdt
dt
dt R
R R
или
dτ
an ; an n
R
R
dt
2
2
111
25
26.
11126
27. Вопрос № 3. Уравнение кинематики поступательного равнопеременного движения (вывод).
11127
28. Вычисление пути Равномерное движение Если движение задано по проекциям
Вычисление путиРавномерное движение
a 0 const
S r r t S t
Если движение задано по проекциям
2
2
2
r x y z
r x y z
111
28
29. Аналогично вычисляем скорость
x y z2
x
2
y
111
2
z
29
30. Равноускоренное движение Весь путь разбивают на множество участков, на которых скорость можно считать постоянной (за малый
Равноускоренное движениеa const 0 at
Весь путь разбивают на множество
участков, на которых скорость можно
считать постоянной (за малый
промежуток времени изменением
скорости можно пренебречь)
111
30
31. Полный путь или перемещение получаем сложением этих малых участков Чем меньше промежутки времени, тем точнее расчёт.
Полный путь или перемещениеполучаем сложением этих малых
участков
r t
Чем меньше промежутки времени,
тем точнее расчёт.
111
31
32. Переходим к пределу
r lim t t dtt2
t 0
t1
2 t
at
0 at dt 0t
2 t
t
t2
1
111
2
1
32
33. Положим начальный момент времени равным нулю и добавим начальное положение r0 или S0 Это закон кинематики равноускоренного
Положим начальный моментвремени равным нулю и добавим
начальное положение r0 или S0
2
at
r r0 0t
2
2
at
S S 0 0t
2
Это закон кинематики
равноускоренного движения
111
33
34. Вычислить ускорение можно следующими способами (аналогично скорости и перемещению)
a ax a y az an aτa
2
2
2
ax a y az
111
2
2
an aτ
34
35.
11135
36. Вопрос № 4. Движение материальной точки по окружности. Угловая скорость и угловое ускорение. Уравнения кинематики вращательного
движения.Связь между линейными и угловыми
характеристиками движения.
111
36
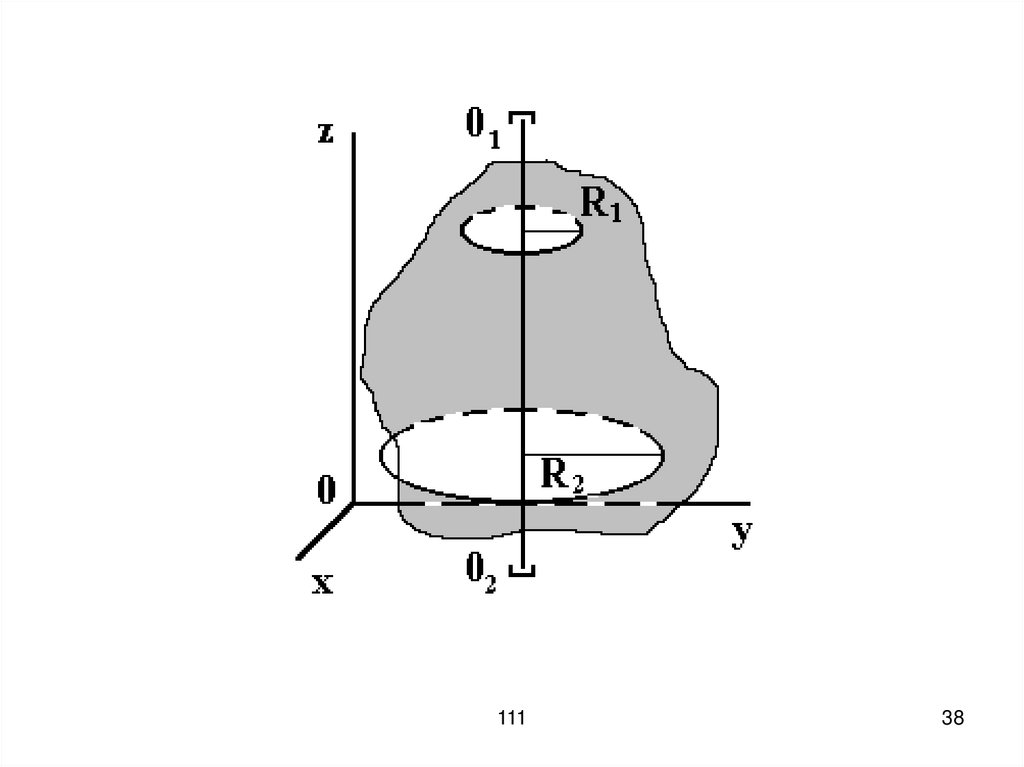
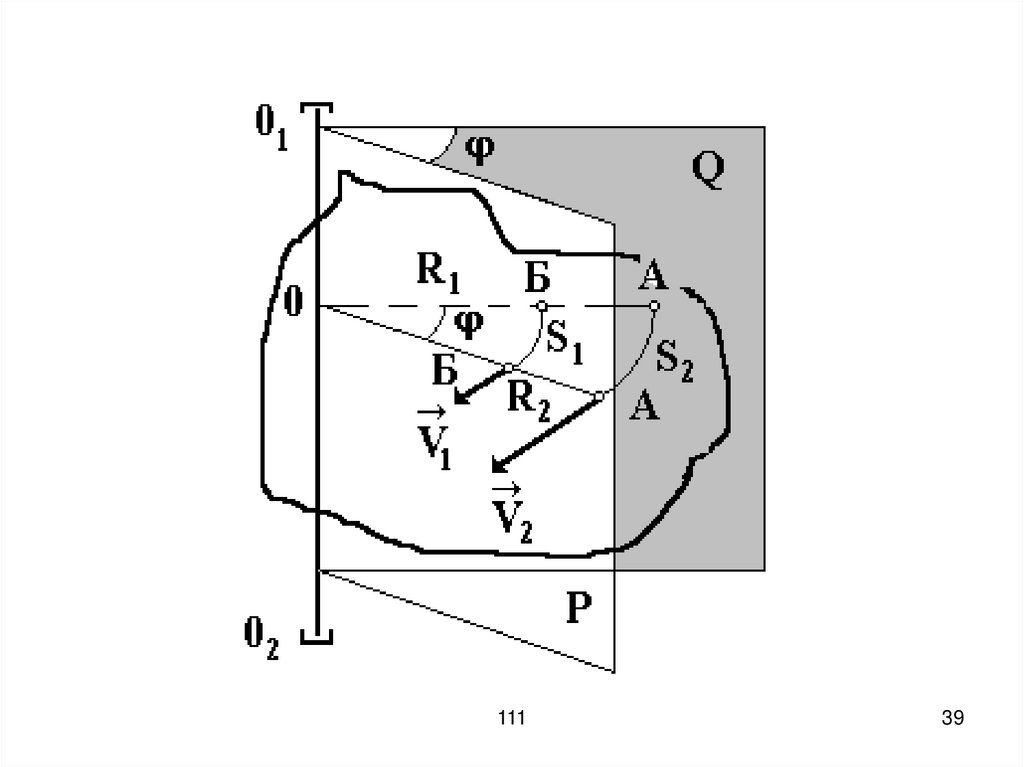
37. Вращательное движение Вращательным движением абсолютно твердого тела называют движение, при котором все его точки описывают
окружности, лежащие впараллельных плоскостях, а центры
их лежат на оси вращения.
111
37
38.
11138
39.
11139
40. Вращательное движение характеризуется углом поворота φ, угловой скорость вращения ω, угловым ускорением ε
φ dφω lim
φ
t 0
t dt
ω dω
φ
ε lim
ω
t 0
t dt
111
40
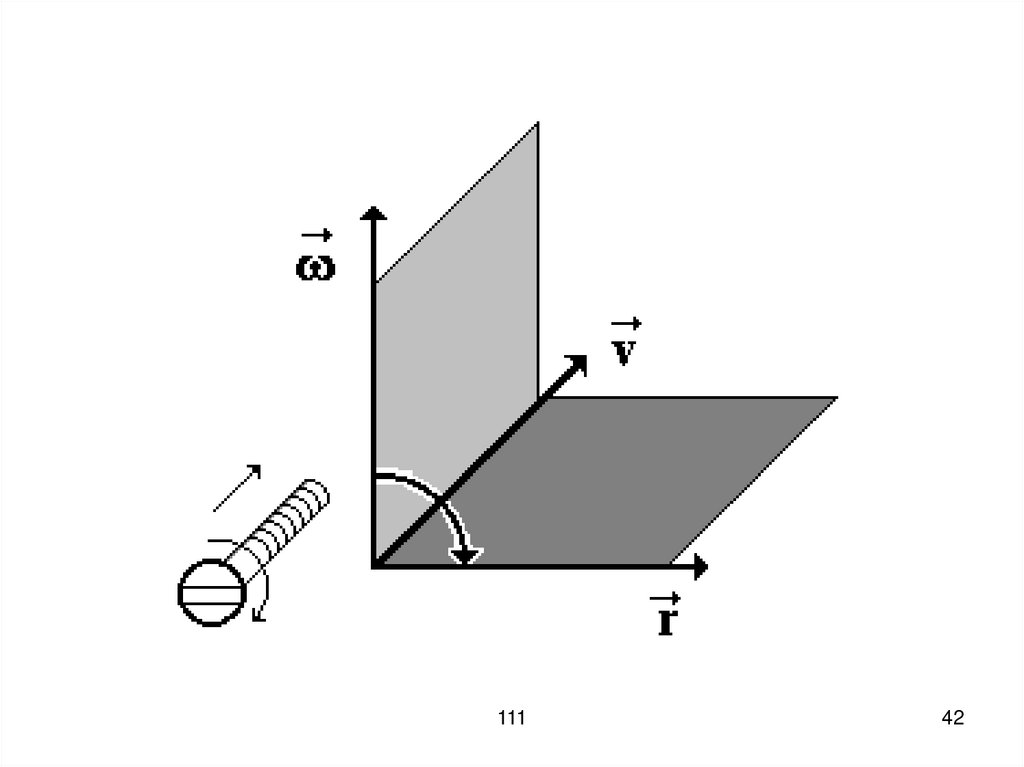
41. Вектор ω направляют вдоль оси вращения согласно правилу правого буравчика
ω r111
41
42.
11142
43. Вектора ω и ε направлены одинаково, если вращение ускоренное, вектора ω и ε направлены в разные стороны, если вращение
замедленное.111
43
44. Связь величин Закон кинематики равнопеременного вращательного движения
Связь величинaτ ε r ω r S φ r
Закон кинематики равнопеременного
вращательного движения
2
εt
φ φ 0 ω 0t
2
111
44
45. Так же, для описания вращательного движения используют частоту (количество оборотов за 1 секунду) и период (время одного
полногооборота)
1
ν
T
1
T
ν
111
45
46. Циклическая частота она же угловая скорость вращения – количество оборотов за 2π секунды
ω 2π ν2π
ω
T
111
46
47.
11147
48. Динамика
11148
49.
11149
50. ВОПРОСЫ 5. Динамика. Масса, инертность, сила. Первый закон Ньютона. 6. Второй закон Ньютона. Третий закон Ньютона. Закон
сохраненияимпульса (вывод). Центр масс (центр
инерции). Закон движения центра
инерции.
111
50
51.
11151
52. Вопрос № 5. Динамика. Масса, инертность, сила. Фундаментальные силы. Первый закон Ньютона и понятие инерциальной системы
отсчёта.111
52
53. Законы Ньютоновой механики выполняются если (границы применимости): 1) Пространство Евклидово (т.е. описывается аксиомами
евклидовойгеометрии, также, трёхмерное);
2) Пространство изотропно;
3) Гелиоцентрическая система
инерциальна (в центре системы
солнце, которое движется без
ускорения);
111
53
54. 4) Закон всемирного тяготения выполняется для всей известной для нас вселенной; 5) Изменение всех полей со скоростью света; 6)
Скорость тел много меньшескорости света (v << c);
7) Массы тел много больше масс
элементарных частиц (M >> m).
111
54
55. Основные понятия Масса – физическая величина, мера инертности. Инертность – свойство тел сопротивляться при попытке изменить
скорость.Сила – физическая величина, мера
взаимодействия тел.
111
55
56. В природе существуют четыре фундаментальные силы (все взаимодействия в природе сводятся к этим четырём силам): 1)
Гравитационное взаимодействие(всемирное тяготение);
2) Электромагнитное
взаимодействие (электрическое и
магнитное поле);
111
56
57. 3) Сильное или ядерное взаимодействие (связь частиц в атомном ядре); 4) Слабое взаимодействие (процессы распада элементарных
частиц).111
57
58. 1-й закон Ньютона (закон инерции). Всякое тело находится в состоянии покоя или равномерного и прямолинейного движения, пока
воздействие со стороны других телне заставит его изменить это
состояние.
111
58
59. Инерциальные системы отсчёта – системы отсчёта, в которых тела движутся без ускорения если на них не действуют силы со стороны
других тел или в которыхвыполняется 1-й закон Ньютона.
1-й закон Ньютона нужен для
определения инерциальных систем.
111
59
60.
11160
61. Вопрос № 6. Второй закон Ньютона как уравнение движения. Третий закон Ньютона. Закон сохранения импульса (вывод). Центр масс
(центр инерции).Закон движения центра инерции.
111
61
62. Законы Ньютона получены в результате обобщения большого количества опытных фактов. Например, в результате взаимодействия
(независимо от видавзаимодействия) два тела получают
ускорения, такие, что выполняется
равенство:
m1a1 m2 a2
111
62
63. Если рассматривать через импульс тела – произведение массы тела на его скорость, то получим:
d d m dpm
F ma
dt
dt
dt
111
63
64. Скорость изменения импульса тела равна действующей на тело силе F – уравнение движения тела или основной закон динамики
поступательного движения.Он же 2-й закон Ньютона:
dp
F
dt
111
64
65. 3-й закон Ньютона. Силы с которыми действуют друг на друга взаимодействующие тела, равны по модулю и противоположны по
направлению и направлены вдольлинии, которая проходит через их
центр масс:
F12 F21
111
65
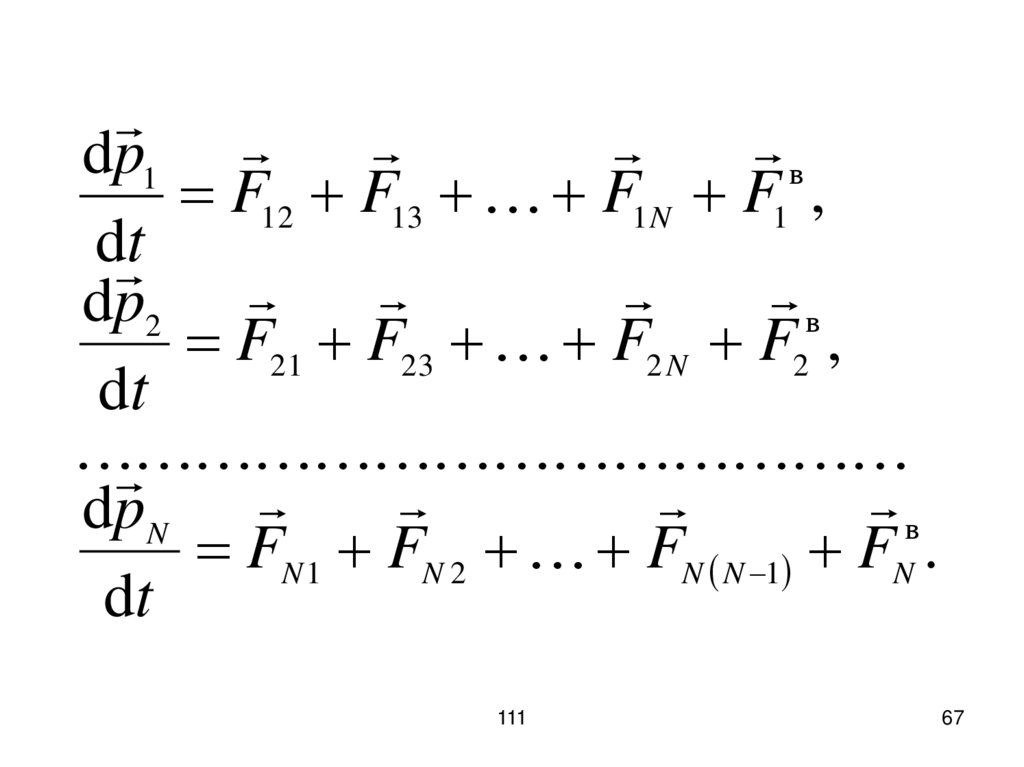
66. Закон сохранения импульса. Рассмотрим замкнутую систему из N тел. Запишем изменение импульса и действующие силы на тело для
каждого тела:111
66
67.
вdp1
F12 F13 F1 N F1 ,
d t
в
dp 2
F21 F23 F2 N F2 ,
dt
в
dp N
FN 1 FN 2 FN N 1 FN .
dt
111
67
68. Просуммируем все эти уравнения
NN
N
dpi
в
Fij Fi
i 1 dt
i j
i 1
111
68
69. Первая сумма справа равна нулю по 3-му закону Ньютона: . Вторая сумма справа равна нулю так как на изолированную систему не
Первая сумма справа равнанулю
по
3-му закону Ньютона: Fij Fji .
Вторая сумма справа равна нулю так
как на изолированную систему не
действуют никакие силы
(внешняя сила равна нулю Fв = 0).
111
69
70. Следовательно Закон сохранения импульса. В замкнутой изолированной системе полный импульс остаётся постоянным.
СледовательноN
N
dpi
dt pi 0 pi const
i 1
i 1
i 1
N
Закон сохранения импульса.
В замкнутой изолированной системе
полный импульс остаётся
постоянным.
111
70
71. Центром масс или центром инерции системы называется такая воображаемая точка, радиус-вектор R которой выражается через
радиус-векторы r1, r2, … , rNматериальных точек по формуле:
m1r1 m2 r2 mN rN
R
m1 m2 mN
111
71
72. С первым курсом ЗФО СШФ СФУ дошли до этого места
11172
73. Момент импульса. Момент силы. Кинетическая энергия. Потенциальная энергия. Законы сохранения
11173
74.
11174
75. ВОПРОСЫ 7. Динамика вращательного движения. Момент импульса частицы. Момент силы. Уравнение моментов. 8. Кинетическая энергия.
Работапостоянной и переменной силы.
9. Потенциальная энергия. Условие
потенциальности.
10. Закон сохранения механической
энергии изолированной системы.
111
75
76.
11176
77. Вопрос № 7. Динамика вращательного движения. Момент импульса частицы. Момент силы. Плечо силы. Уравнение моментов. Закон
сохранения моментаимпульса.
111
77
78. Вектором момента силы относительно полюса (точки О) называют векторное произведение радиус-вектора и вектора силы Величина ℓ =
Вектором момента силыотносительно полюса (точки О)
называют векторное произведение
радиус-вектора и вектора силы
M r F
M rF sin α F
Величина ℓ = r · sinα называется
плечом силы.
111
78
79.
αℓ = r·sinα
F
r
M
O
111
79
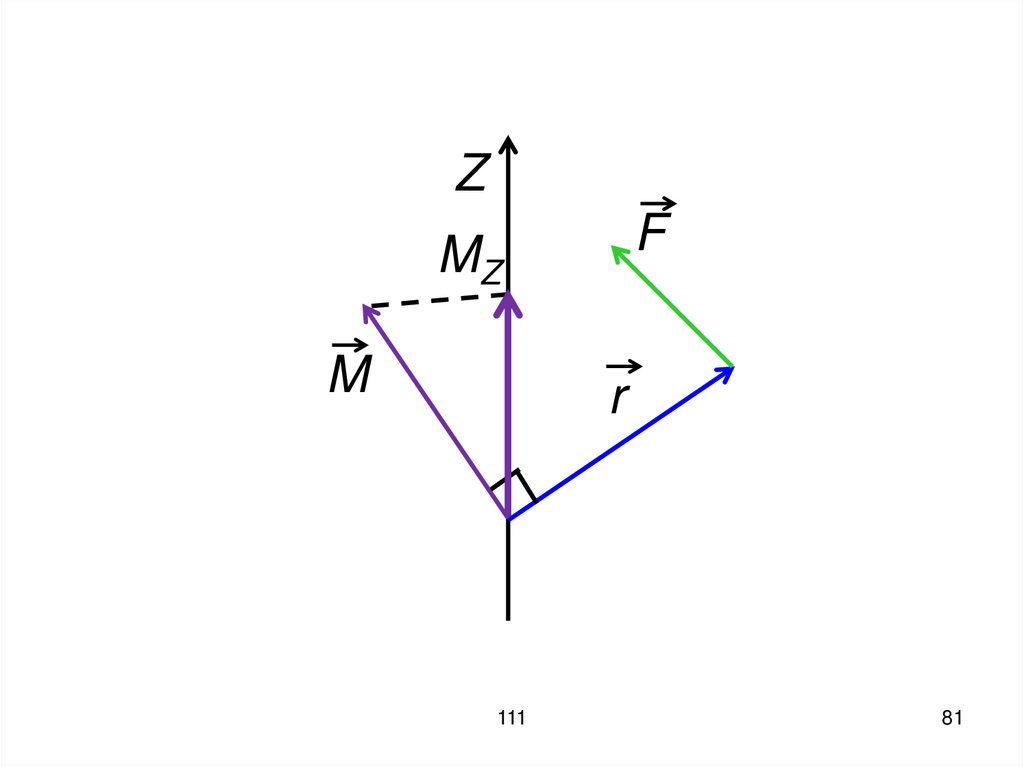
80. Проекция вектора момента силы на произвольную ось, проходящую через полюс, равна проекции на эту ось векторного произведения
радиус-вектора и вектора силыотносительно полюса О, лежащего
на этой оси:
Mz r F z
111
80
81.
ZF
MZ
M
r
111
81
82. Если на точку действует несколько сил, то можно говорить о равнодействующей силе – векторной сумме сил, действующих на тело
NF F1 F2 FN Fi
i 1
111
82
83. Вектор момента результирующей силы относительно полюса О равен геометрической сумме векторов моментов составляющих сил
относительно того же полюса.N
M M1 M 2 M N M i
i 1
111
83
84. Вектором момента импульса материальной точки относительно полюса О называют векторное произведение радиус-вектора и вектора
импульса относительноэтого же полюса
L r p r m
L r p rp sin α
111
84
85. Проекция момента импульса твердого тела на произвольную ось, проходящую через полюс О, равна проекции на эту ось векторного
произведения радиус-вектора ивектора импульса тела относительно
того же полюса О, лежащего на этой
оси, т. е.
Lz r p z
111
85
86. Запишем момент импульса и продифференцируем его
L r pL r p r F M
111
86
87. Получили новое выражение, которое называется уравнением моментов или основное уравнение динамики вращательного движения
L M111
87
88. Из основного уравнения динамики вращательного движения Можно получить закон сохранения момента импульса (аналогично закону
Из основного уравнения динамикивращательного движения
L M
Можно получить закон сохранения
момента импульса (аналогично
закону сохранения импульса).
В замкнутой системе (M = 0)
суммарный момент импульса
остаётся
постоянным.
L const
111
88
89.
11189
90. Вопрос № 8. Кинетическая энергия. Работа постоянной и переменной силы. Мощность. 1-я и 2-я космические скорости.
11190
91. Запишем уравнение движения частицы и домножим на перемещение (dS = ʋ dt):
m Fвнешd
dt Fвнеш dS
m
dt
2
2
m
m d md d
Fвнеш dS
2 2
111
91
92. Если система замкнута, то Fвнеш = 0 и T – кинетическая энергия
Если система замкнута, то Fвнеш = 0 иm
const T
2
2
T – кинетическая энергия
m
p
T
2
2m
2
111
2
92
93. Если на частицу действует постоянная сила F, кинетическая энергия не остаётся постоянной. В этом случае кинетическая энергия за
время dt изменяетсяна величину
dA FdS
dA – работа, совершаемая силой F
на пути dS (dS = ʋ*dt). Работа равна
изменению кинетической энергии:
A T2 T1 T
111
93
94. Пример. Вычислим работу, которую совершают внешние силы при сжатии пружины (работа переменной силы): здесь F = kx – внешняя
Пример. Вычислим работу, которуюсовершают внешние силы при
сжатии пружины
(работа переменной силы):
2
x
2 x
2
kx
kx
A FdS kxdx
2 0
2
1
0
здесь F = kx – внешняя сила, равная
силе упругости но противоположно
направленная, k – коэффициент
упругости, x – сжатие пружины.
111
94
95. Мощность – работа совершаемая в единицу времени
dAP
F
dt
111
95
96. Запишем закон всемирного тяготения и потенциальную энергию гравитационного взаимодействия здесь G = 6,6720·10-11 Н·м2/кг2
Запишем закон всемирноготяготения и потенциальную энергию
гравитационного взаимодействия
m1m2
m1m2
F G 2 , W G
,
R
R
здесь G = 6,6720·10-11 Н·м2/кг2
гравитационная постоянная,
m1, m2 – масса тел, R – расстояние
между центрами масс тел.
111
96
97. 1-я космическая скорость – скорость, с которой тело движется над поверхностью земли не падая Скорость тела, которое вращается
1-я космическая скорость – скорость,с которой тело движется над
поверхностью земли не падая
2
M Землиm
M Земли
m G
, G
gR
2
R
R
R
Скорость тела, которое вращается
вокруг Земли на некоторой высоте h
M Земли
G
R h
111
97
98. Если тело получит достаточное количество энергии (кинетической), то эта энергия будет потрачена на преодоление потенциального
барьера и тело покинет Землюнавсегда. То есть, телу сообщили
2-ю космическую скорость
m
M Землиm
M Земли
G
, 2G
2
R
R
2
111
98
99.
11199
100. Вопрос № 9. Консервативные силы. Потенциальная энергия. Связь силы и потенциальной энергии (условие потенциальности).
111100
101. Взаимодействие между телами осуществляется посредством физических полей. Каждое тело создаёт вокруг себя особое состояние,
называемоесиловым полем.
111
101
102. Центральное поле – сила, действующая на любую точку в пространстве направлена к центру. Однородное поле – F = const.
Стационарное поле – поле неменяется со временем.
Нестационарное поле – поле
меняется со временем.
111
102
103. Консервативные силы: 1) Это силы, работа которых не зависит от пути, по которому тело переходит из одного положения в другое;
2) Это силы, работа которых налюбом замкнутом пути равна нулю.
111
103
104. Потенциальная энергия Если работа зависит только от начального и конечного положений, то каждой точке поля можно сопоставить
некоторую функциюU(x, y, z).
Величину U назовём потенциальной
энергией.
111
104
105. Через эту функцию можно определить работу по перемещению частицы из 1-го положения во 2-е: A12 = U1 – U2; работа также приводит
к изменениюкинетической энергии:
A = T2 – T1 = U1 – U2 =>
T2 + U2 = T1 + U1 = E –
полная механическая энергия.
Кинетическая энергия увеличивается
за счёт убыли потенциальной.
111
105
106. Зная вид U(x, y, z) можно найти силу, действующую на частицу в каждой точке поля угол α – угол между вектором силы и вектором
Зная вид U(x, y, z) можно найти силу,действующую на частицу в каждой
точке поля
dA FdS FdS cos α
угол α – угол между вектором силы и
вектором перемещения.
В проекции на ось X:
dAx Fx dx dU x
111
106
107. Если полагать, что изменений силы вдоль других осей нет или рассматривать одномерную задачу только вдоль одной оси X (dy, dz =
0; y, z = const),то можно говорить о частной
производной:
dU
U
Fx
dx
x
111
107
108. Если учитывать все компоненты, то получим:
F Fx i Fy j Fz kU U U
i
j
k
x
y
z
U grad U
111
108
109. Здесь grad – это оператор набла или градиент – вектор, направленный в сторону максимального роста поля. Оператор набла –
математическийоператор – компоненты которого
являются частными производными
по координатам
i
j k
y
z
x
111
109
110. Условие потенциальности Поля, которые можно описывать функцией П(x, y, z, t), называются потенциальными, градиент этой функции
определяет силу в каждойточке поля:
F = gradП,
П – потенциал.
111
110
111. В случае стационарного поля, его силы будут консервативными П(x, y, z) = – U(x, y, z).
111111
112.
111112
113. Вопрос № 10. Закон сохранения механической энергии изолированной системы и однородность времени. Обобщённый закон сохранения
энергии.Финитное и инфинитное движение.
111
113
114. Закон сохранения энергии в механике Полная механическая энергия замкнутой изолированной системы складывается из кинетической
энергии частиц и потенциальнойэнергии взаимодействия частиц:
N
N
i
i j
E Ti U ij const,
Uij – энергия взаимодействия частиц.
111
114
115. Кинетическая энергия поступательного движения Кинетическая энергия вращательного движения
Кинетическая энергияпоступательного движения
m
2
2
Кинетическая энергия
вращательного движения
Iω
2
111
2
115
116. Потенциальная энергия деформированной пружины Потенциальная энергия гравитационного взаимодействия двух тел
Потенциальная энергиядеформированной пружины
kx
2
2
Потенциальная энергия
гравитационного
взаимодействия двух тел
m1m2
G
R
111
116
117. Если в системе есть силы приводящие к потери механической энергии (диссипативные), то полная механическая энергия уменьшается.
Общефизический закон сохраненияэнергии: энергия никогда не
создаётся и не уничтожается, она
может только переходить из одной
формы в другую.
111
117
118. В основе сохранения энергии лежит однородность времени, т.е. равнозначность всех моментов времени. Следовательно, изменение
одногомомента времени на другой не
изменяет свойств механической
системы. Закон сохранения энергии
выполняется в любой момент
времени.
111
118
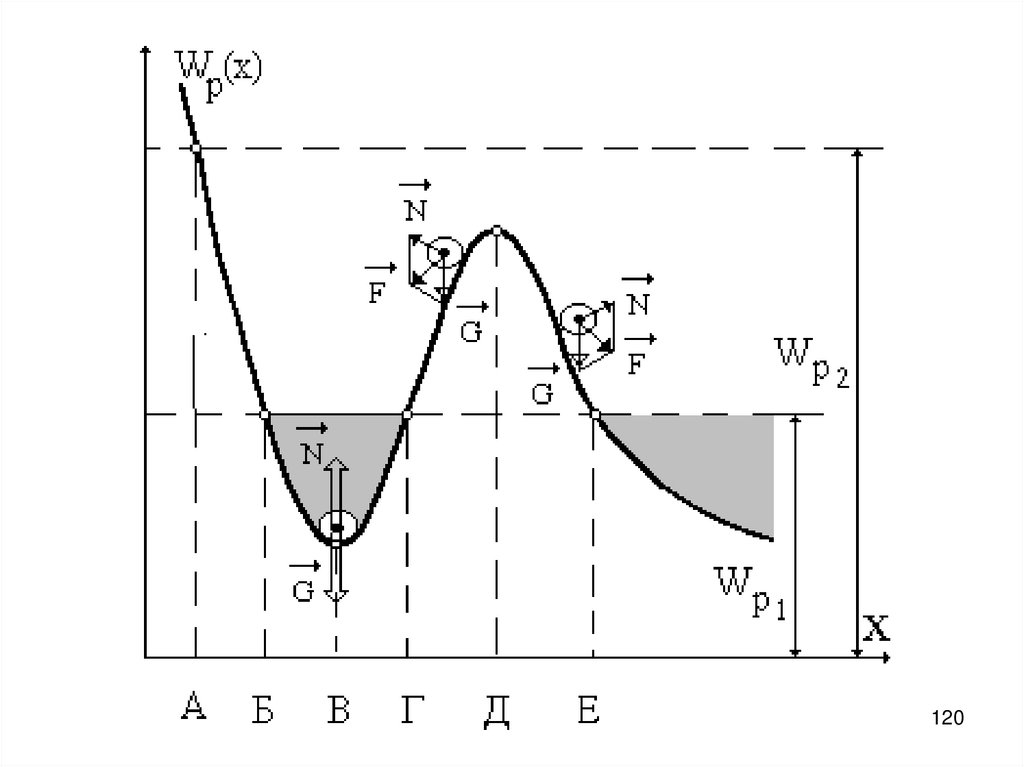
119. Движение частицы в потенциальном поле: если полная энергия частицы меньше значения потенциального барьера, то частица может
проникать только в ограниченнуюобласть пространства – такое
движение называют финитным; если
частица может преодолеть
потенциальный барьер, то движение
будет инфинитным
(неограниченным).
111
119
120.
111120
121.
111121