




 physics
physicsSimilar presentations:






")



Оценка качества переходного процесса скорректированной САУ
1.
Оценка качества переходного процесса скорректированнойСАУ
Мы обсудим важность точной настройки динамического поведения систем. Это обеспечивает надежность и эффективность автоматического управления.
Наша цель – минимизировать ошибки и оптимизировать отклик системы.
2.
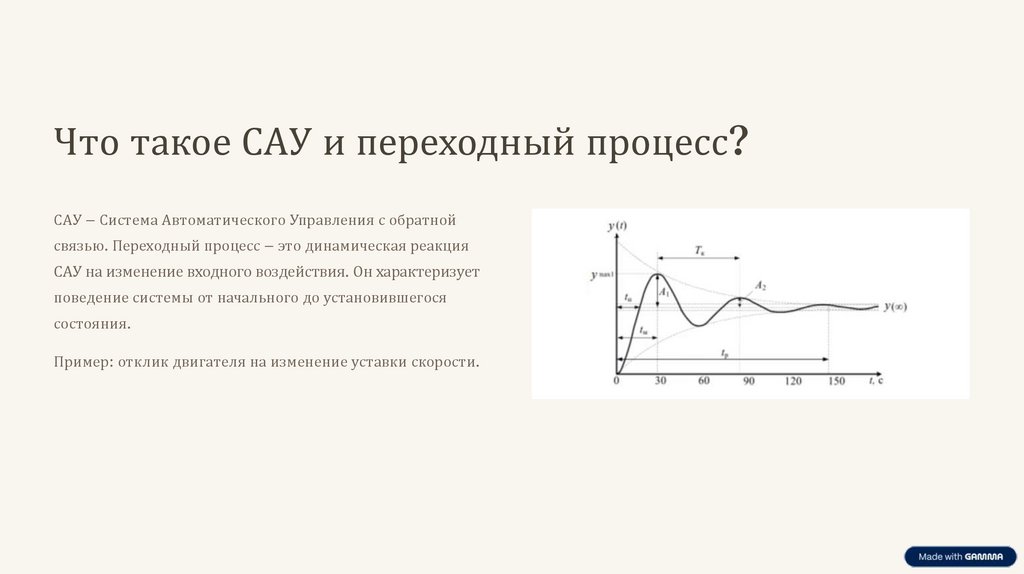
Что такое САУ и переходный процесс?САУ – Система Автоматического Управления с обратной
связью. Переходный процесс – это динамическая реакция
САУ на изменение входного воздействия. Он характеризует
поведение системы от начального до установившегося
состояния.
Пример: отклик двигателя на изменение уставки скорости.
3.
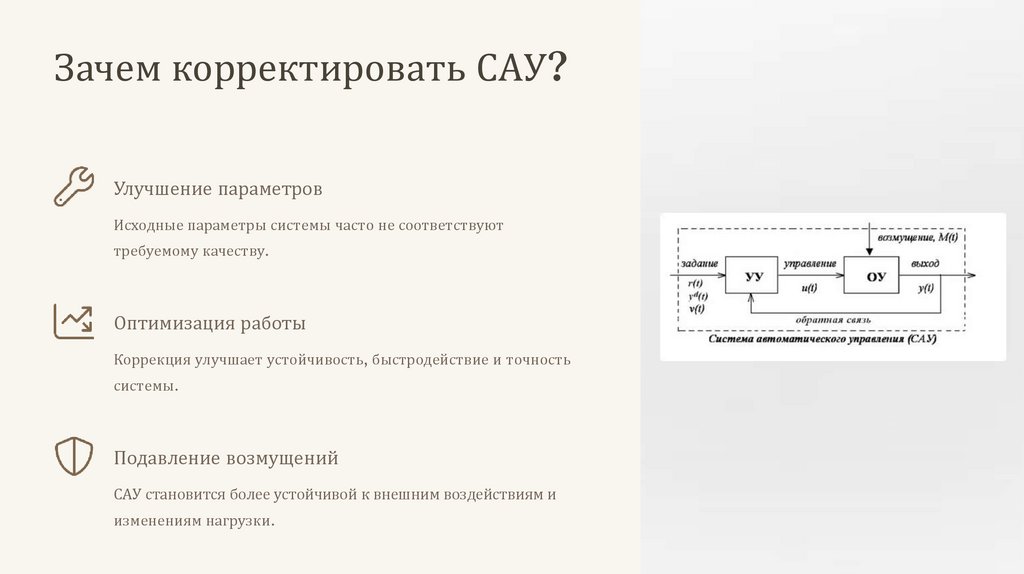
Зачем корректировать САУ?Улучшение параметров
Исходные параметры системы часто не соответствуют
требуемому качеству.
Оптимизация работы
Коррекция улучшает устойчивость, быстродействие и точность
системы.
Подавление возмущений
САУ становится более устойчивой к внешним воздействиям и
изменениям нагрузки.
4.
Основные показатели качества переходного процессаПеререгулирование
Время регулирования
Время нарастания
Максимальное отклонение от установившегося значения. Желательно
Время, за которое отклонение входит в заданный коридор (±2% или
Время достижения первого максимума или 90% от установившего
до 20%.
±5%).
значения.
5.
Методы оценки: Временнаяобласть
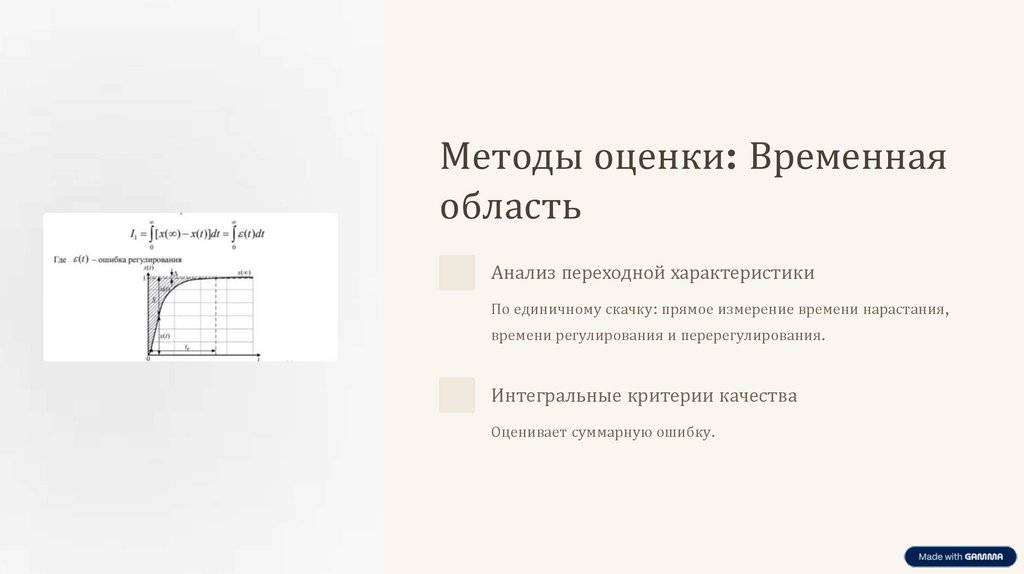
Анализ переходной характеристики
По единичному скачку: прямое измерение времени нарастания,
времени регулирования и перерегулирования.
Интегральные критерии качества
Оценивает суммарную ошибку.
6.
Методы оценки: Частотная областьЗапас по фазе (φз, °)
Запас по амплитуде (Lз, дБ)
Полоса пропускания (ωс,
рад/с)
Характеризует степень устойчивости
Также показатель устойчивости.
системы. Типичное значение >30-45°.
Типичное значение >6-10 дБ. Эти
Ширина частотного диапазона, в
показатели влияют на демпфирование
котором система эффективно
и перерегулирование.
отслеживает входной сигнал. Влияет
на быстродействие.
7.
Основные методы корректировки САУСинтез по модальному управлению
1
Размещение полюсов замкнутой системы.
Корректирующие звенья
2
Опережающие (Lead) улучшают быстродействие. Отстающие (Lag)
уменьшают ошибку.
3
Корректирующие устройства по задающему
воздействию (ПИД-регуляторы)
Пропорционально-интегрально-дифференциальные регуляторы.
Настройка коэффициентов Kp, Ki, Kd.
8.
Влияние корректировки на качествоПИ – пропорционально
интегральное
П-пропорциональное
Позволяет достичь компромисса
астатических объектов.
между быстродействием, точностью и
устойчивостью.
Применяется такое звено для
ПД-пропорционально
дифференциальное
Снижает перерегулирование (на 2050%) и время регулирования.
9.
Практические примерыВ системах управления двигателями корректировка обеспечивает точное позиционирование. Температурные контроллеры
минимизируют перерегулирование. Круиз-контроль поддерживает скорость, а промышленные роботы демонстрируют
плавность и точность движений.
10.
Заключение1
Фундаментальный аспект
Оценка качества переходного процесса критична для
проектирования САУ.
2
Комплексный анализ
Требуется анализ временных и частотных характеристик.
3
Улучшение свойств
Целенаправленная корректировка улучшает динамические свойства
системы.
4
Постоянное совершенствование
Необходимо постоянно улучшать методы анализа и синтеза САУ.