


 physics
physicsSimilar presentations:






")



Методы синтеза САУ
1.
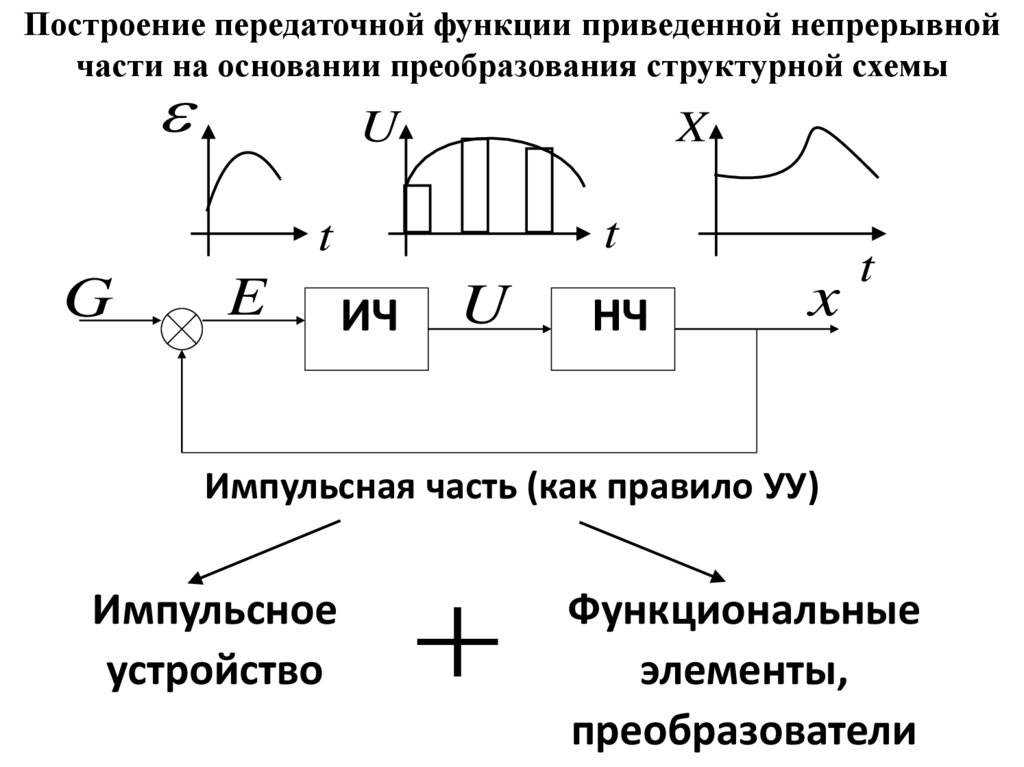
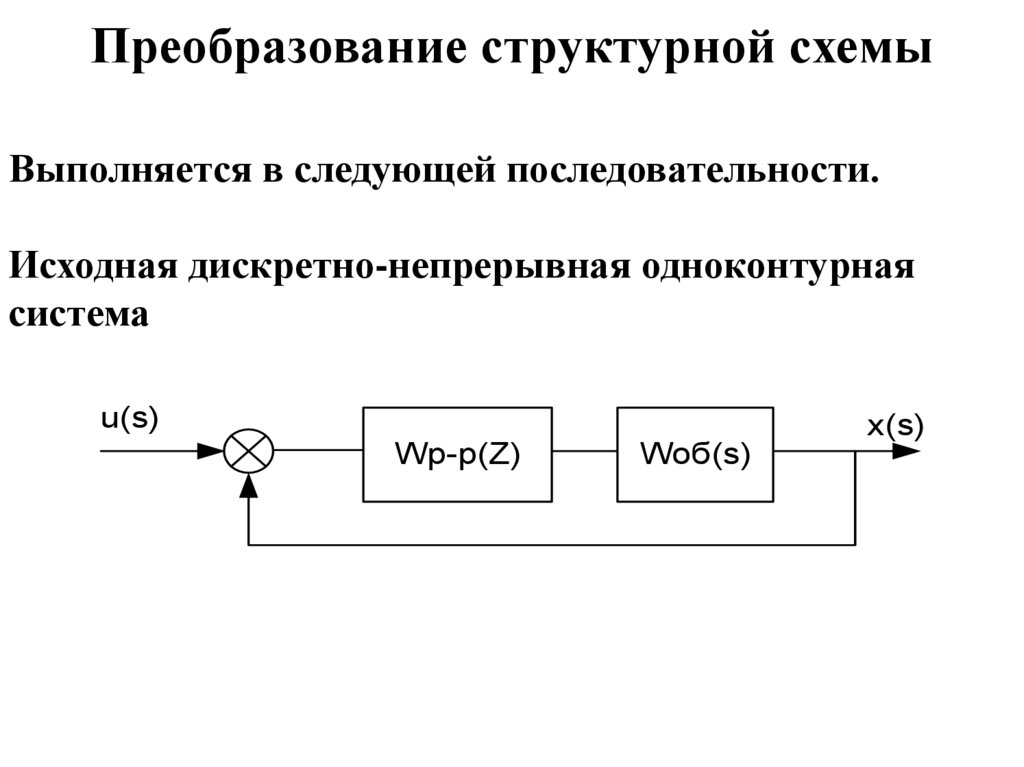
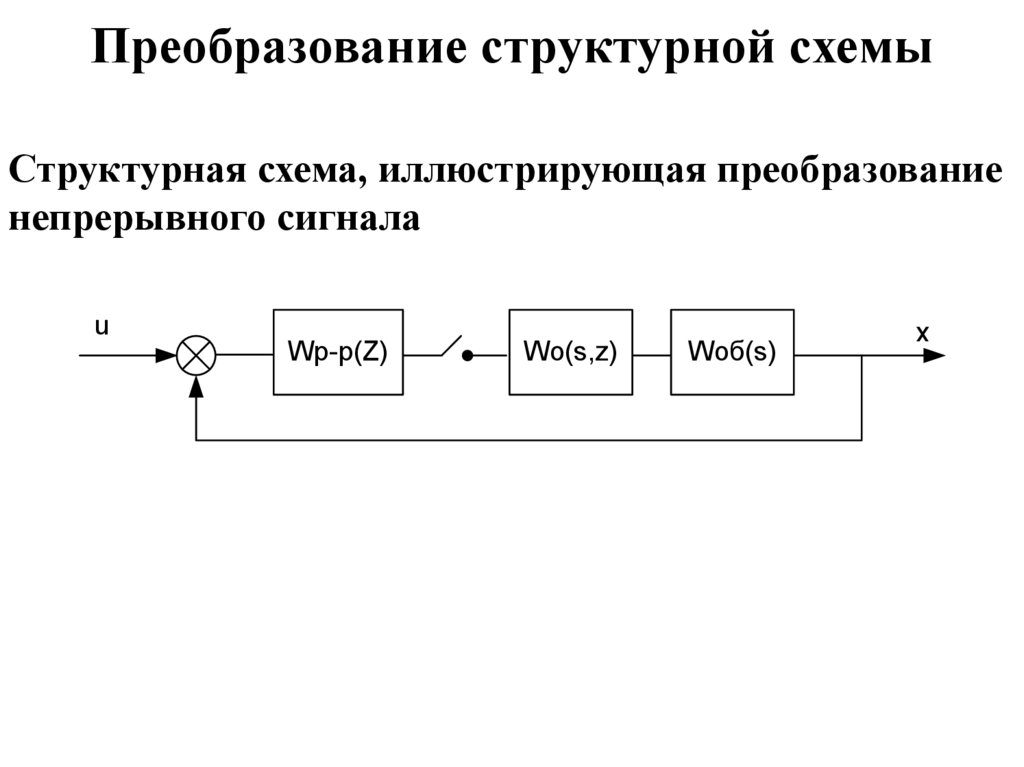
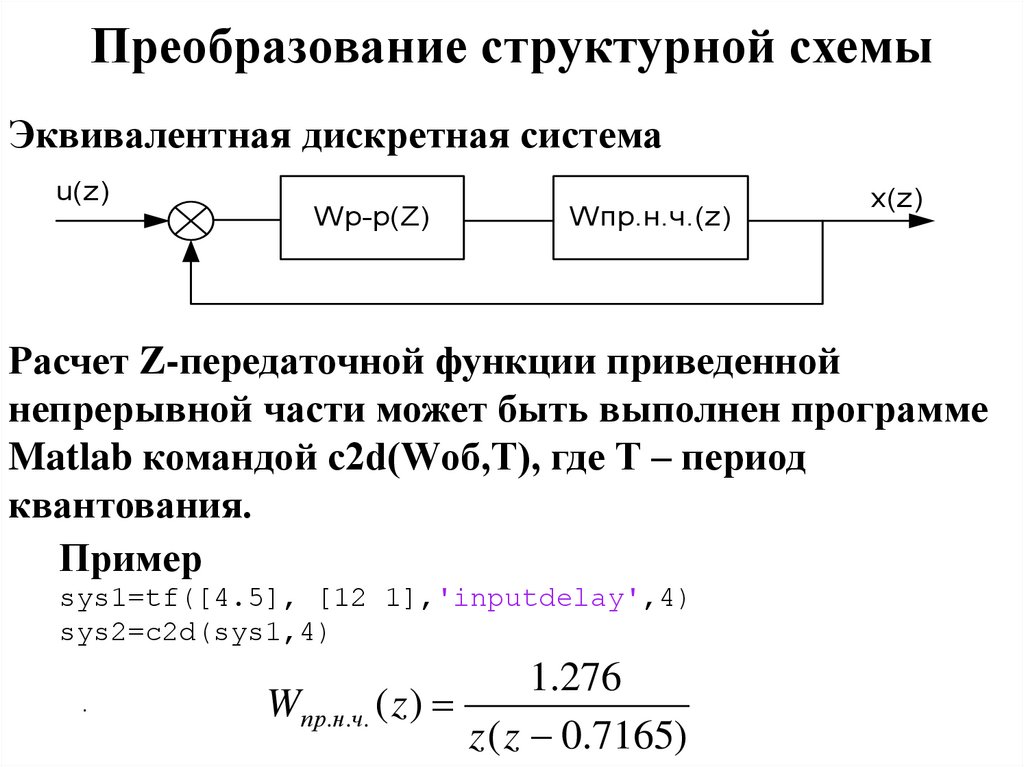
Методы синтеза САУСинтез САУ – направленный расчет,
имеющий конечной целью определение
рациональной структуры системы и
установление оптимальных величин
параметров ее отдельных звеньев.
Системы управления стандартно
включают подсистему в виде объекта
управления и устройства управления
2.
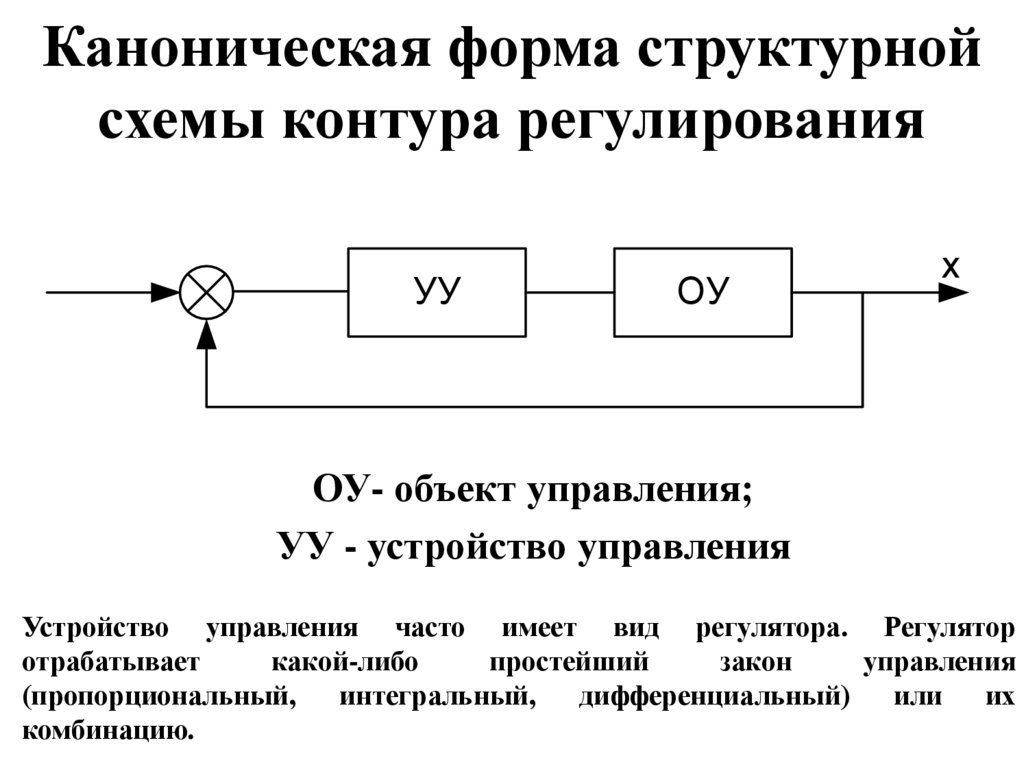
Каноническая форма структурнойсхемы контура регулирования
УУ
ОУ
x
ОУ- объект управления;
УУ - устройство управления
Устройство управления часто имеет вид регулятора. Регулятор
отрабатывает
какой-либо
простейший
закон
управления
(пропорциональный,
интегральный,
дифференциальный)
или их
комбинацию.
3.
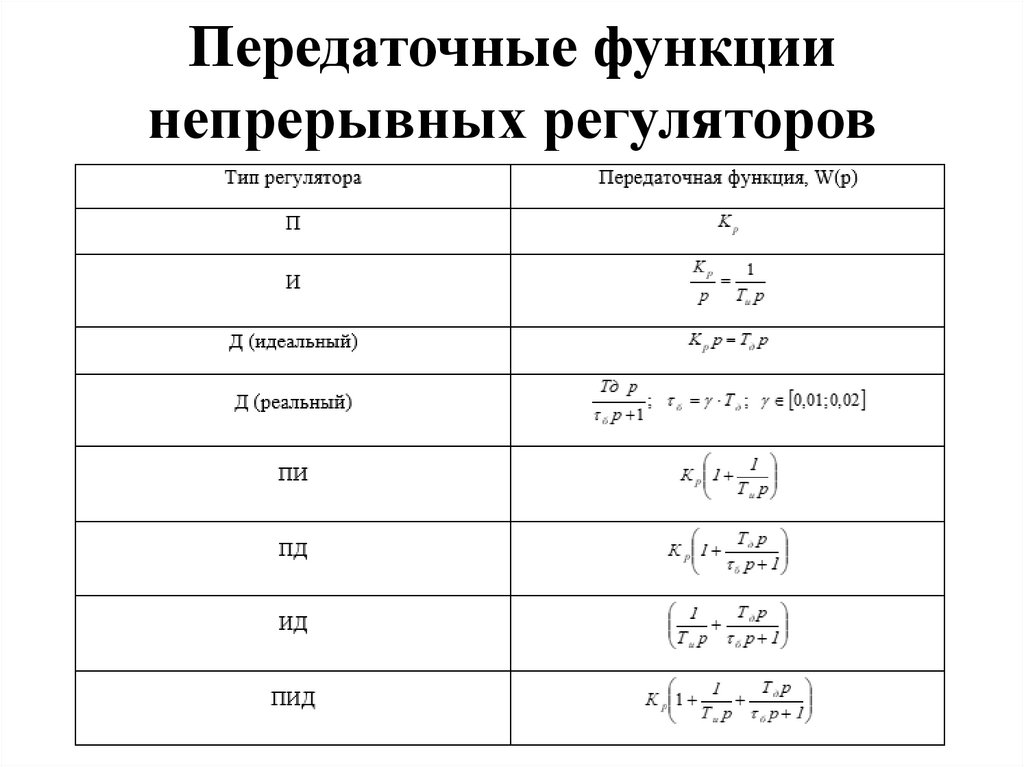
Передаточные функциинепрерывных регуляторов
4.
Цель и критерии расчета контуроврегулирования
Параметры регуляторов: коэффициент передачи
Кр; постоянная времени интегрирования Tи;
постоянная
времени
дифференцирования
Тд
называют настройками регулятора.
Настройки должны обеспечивать необходимый
запас устойчивости и показатели качества управления
как в установившемся, так и в динамических
режимах, тогда их считают оптимальными.
5.
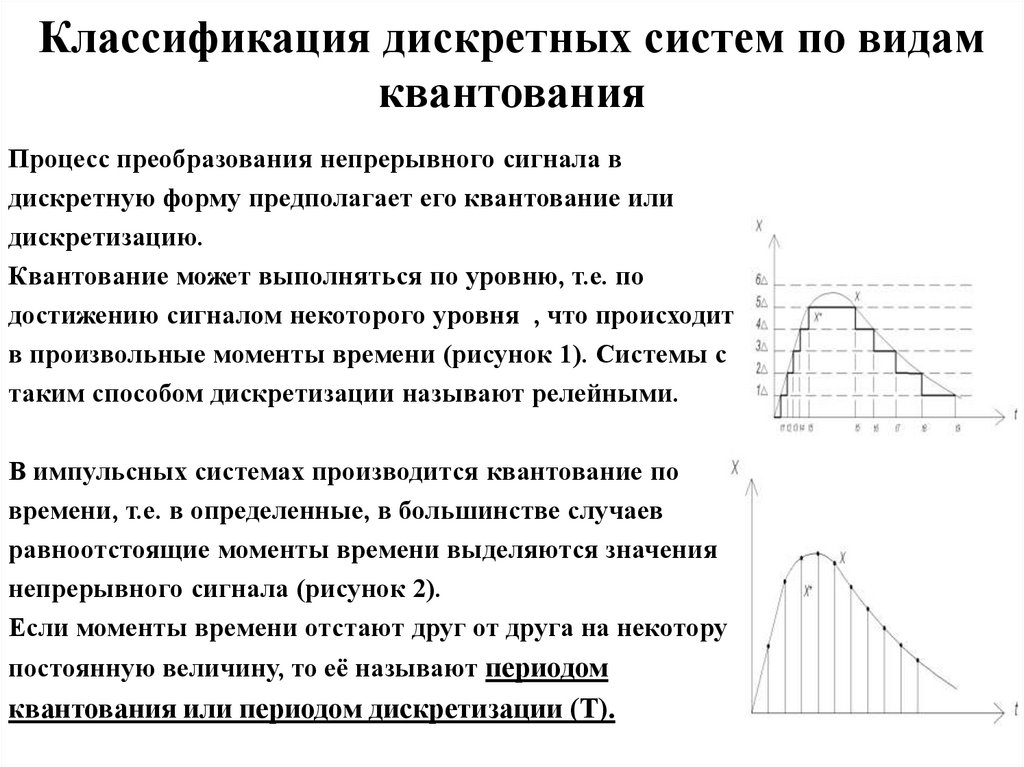
Запас устойчивостиОпределяется по критерию Найквиста как расстояние от
точки пересечения АФЧХ отрицательной действительной
полуоси до точки (-1; j0)
h
(-1; j0)
Im
Ky ; | W(jw) | ;
Re
6.
Запас устойчивости обеспечивается за счет измененияпараметров регулятора, например, уменьшения коэффициента
передачи по сравнению с критическим значением
|W(jω)| = 1 =>Ккр;
W(jω)=-1+j∙0
X(ω)=-1
Y(ω)=0
=> ωкр; Ккр
К < Kкр – устойчива;
К > Ккр – неустойчива;
7.
Качество управленияв установившемся
режиме (точность,
оценивается
статической
ошибкой)
(t ) x (t ) x (t )
o
ф
в неустановившемся
режиме (переходном
режиме)
8.
Статическая ошибка исключаетсяприменением интегрального звена.
Правило: Для устранения
статической ошибки
интегрирующий элемент нужно
включать до места приложения
возмущающего воздействия.
9.
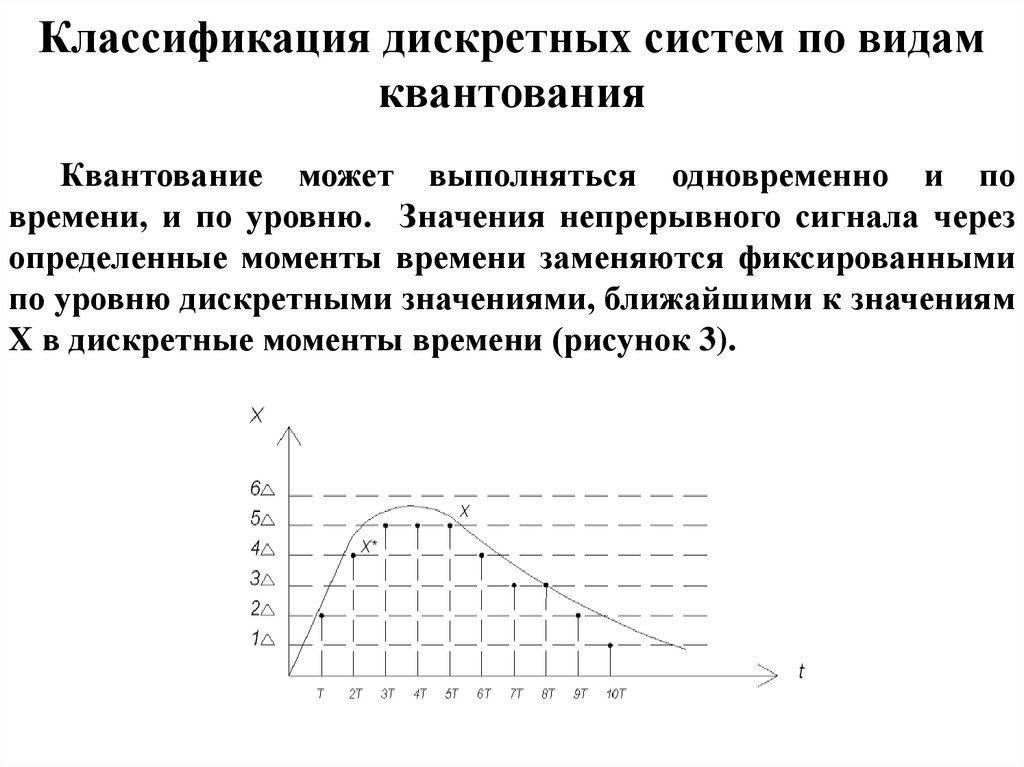
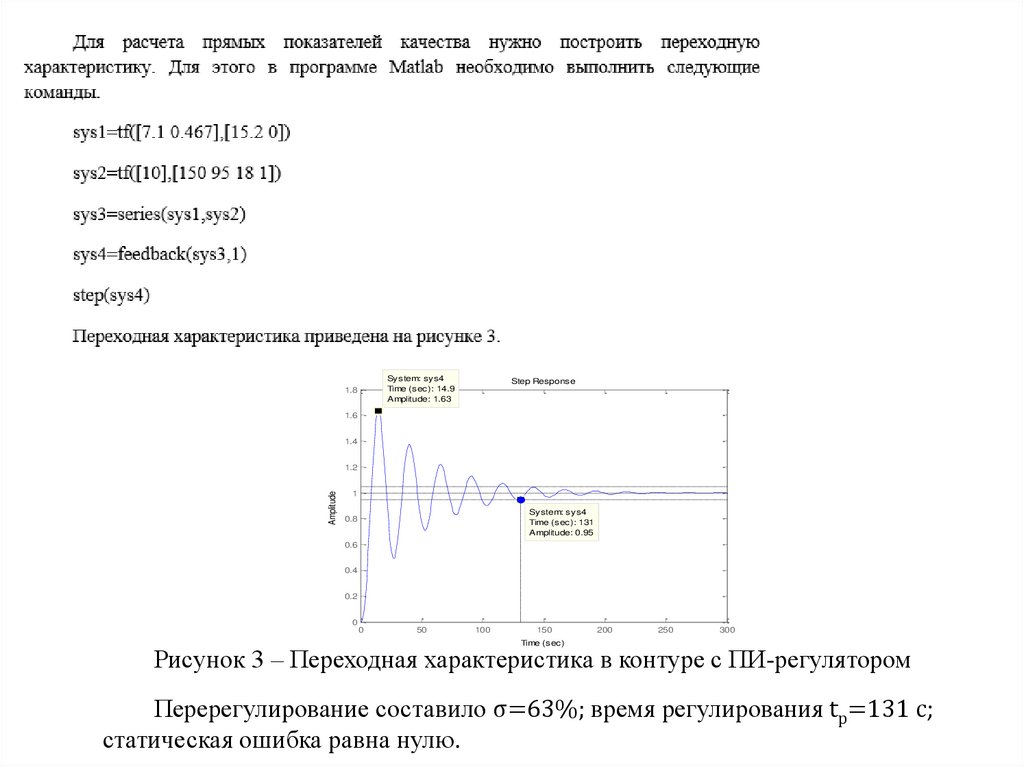
Прямые показатели качестваОпределяются по переходной
характеристике.
Переходная характеристика
(h(t)) – реакция системы на единичное
входное воздействие
10.
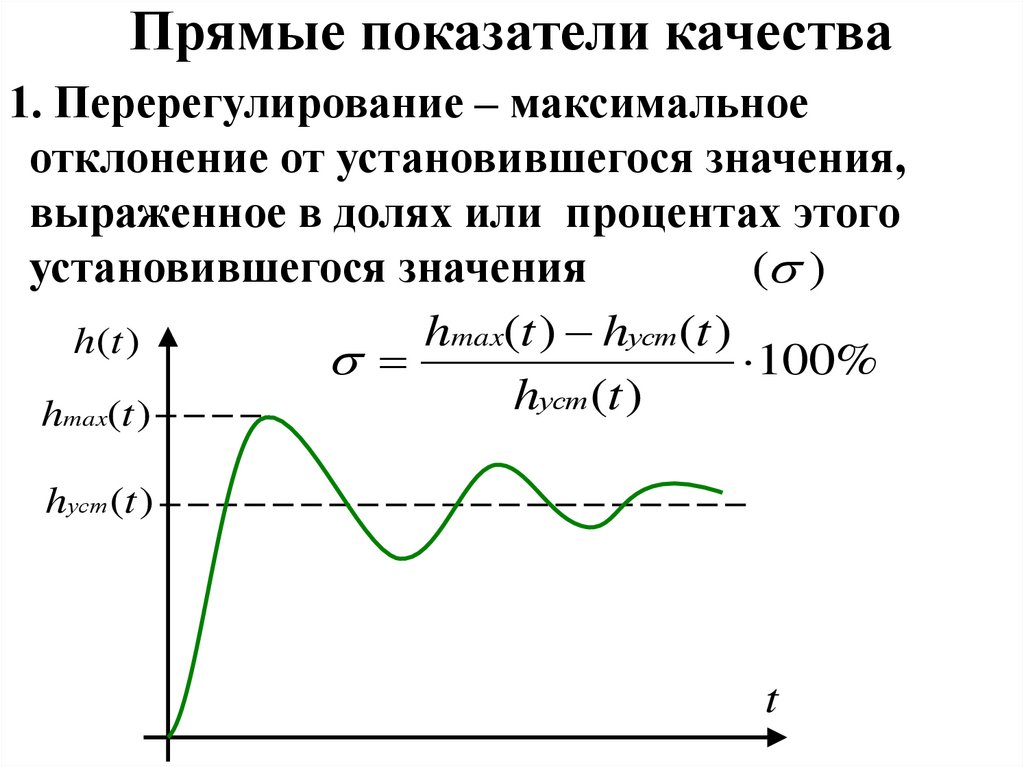
Прямые показатели качества1. Перерегулирование – максимальное
отклонение от установившегося значения,
выраженное в долях или процентах этого
установившегося значения
( )
hmax(t ) hуст (t )
h(t )
100%
hуст (t )
hmax(t )
hуст (t )
t
11.
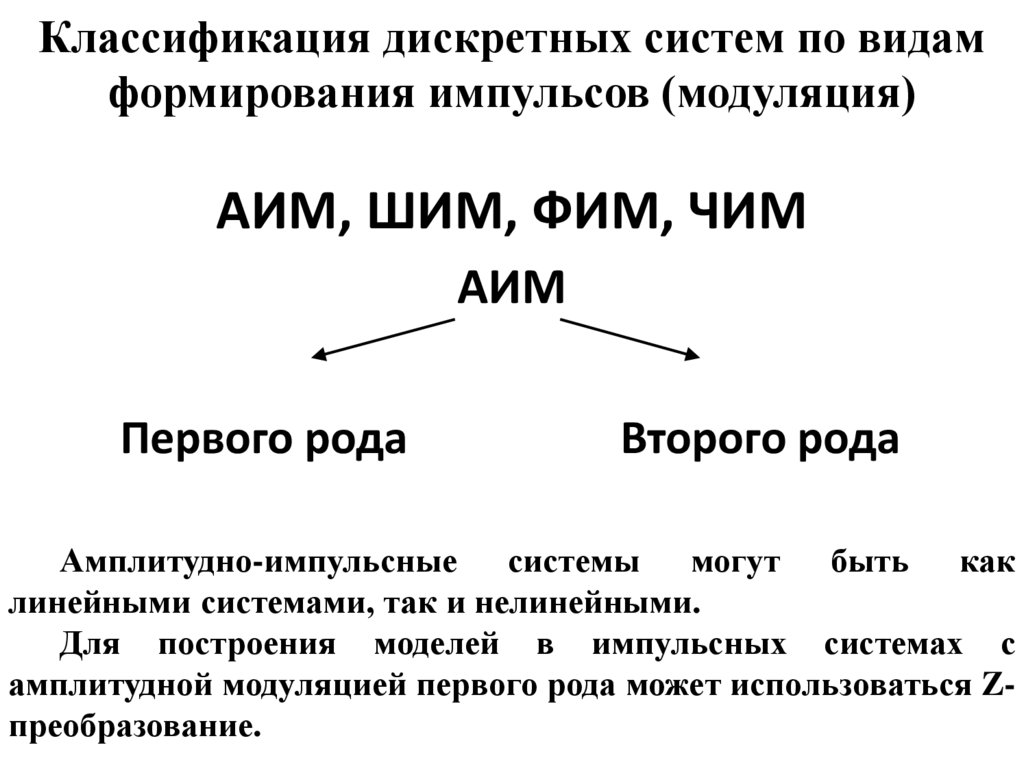
2. Время регулирования – отрезок времени,по истечении которого отклонение
текущего значения выходной величины от
установившегося значения становится
меньше заданной погрешности
h(t ) hуст (t )
определяется требованиями к
техническим показателям системы
(0,01 0,1)hуст (t )
0,05h определяется классом
точности приборов в системе
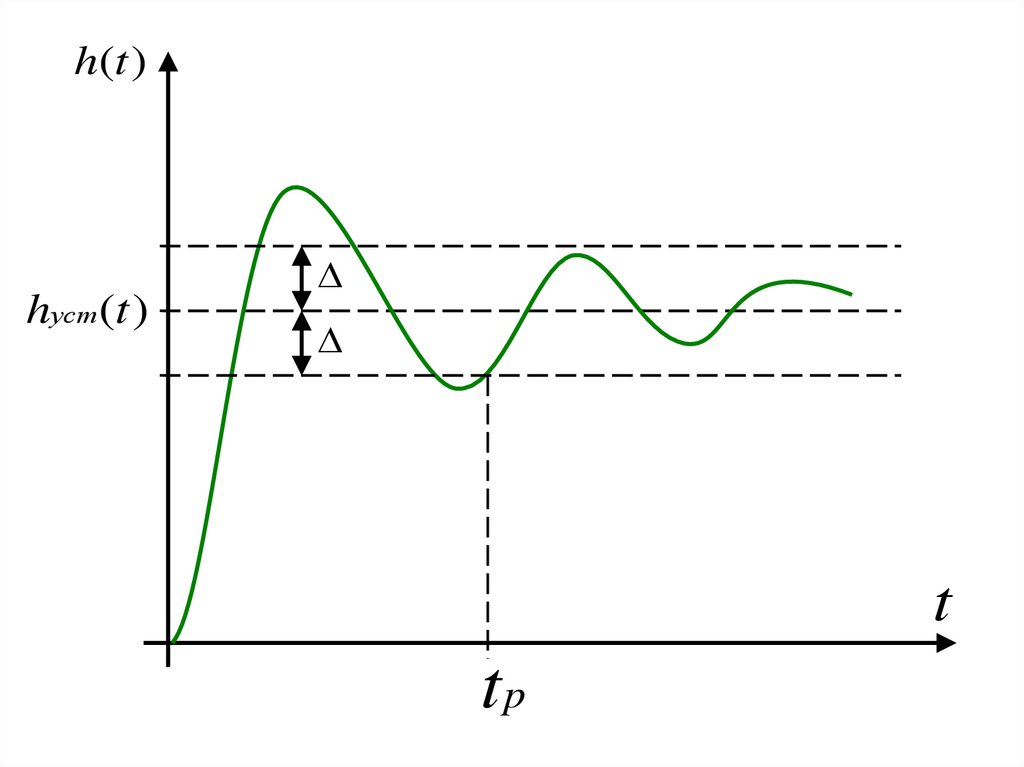
12.
h(t )hуст (t )
t
tp
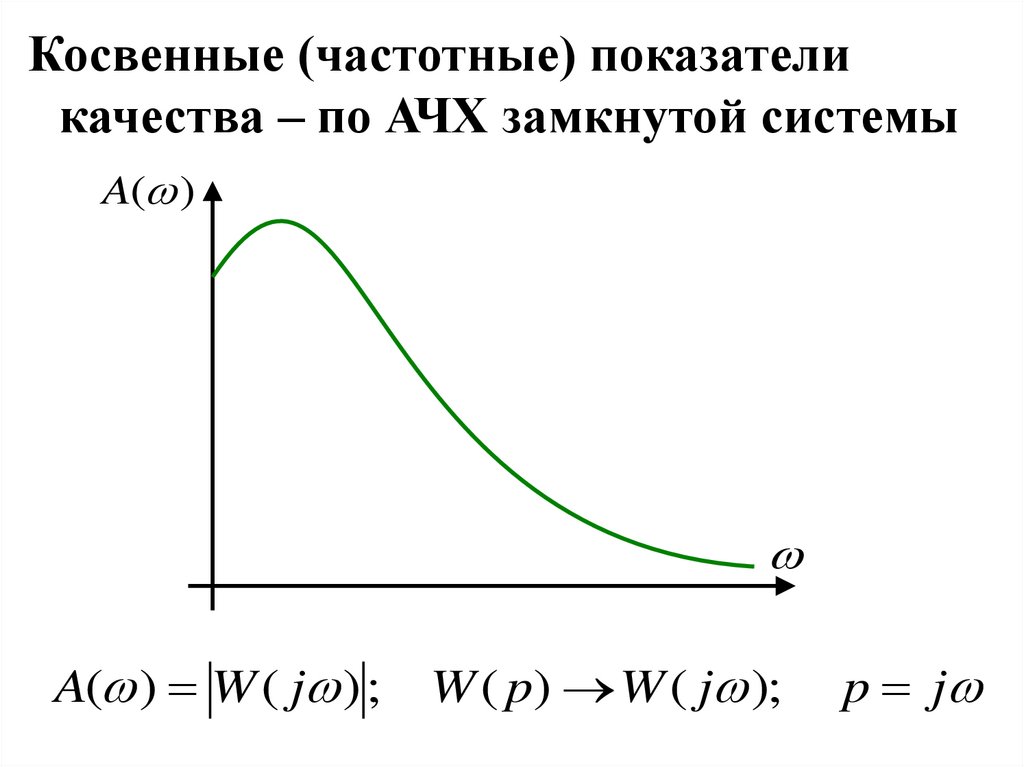
13.
Косвенные (частотные) показателикачества – по АЧХ замкнутой системы
A( )
A( ) W ( j ) ;
W ( p) W ( j );
p j
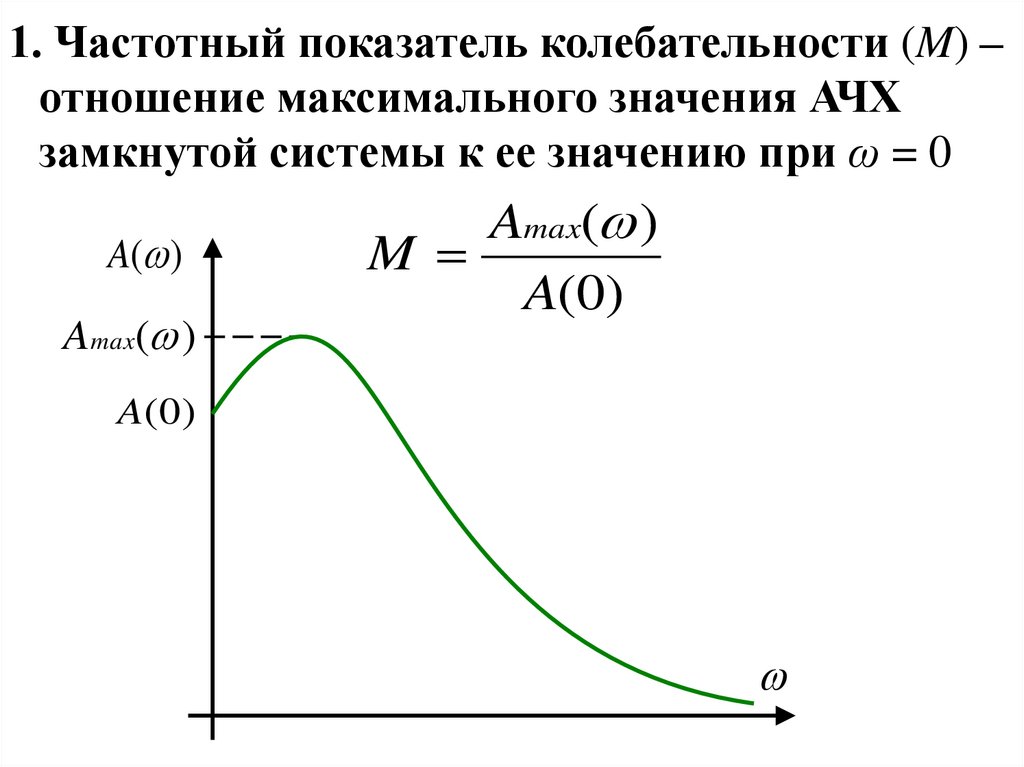
14.
1. Частотный показатель колебательности (M) –отношение максимального значения АЧХ
замкнутой системы к ее значению при ω = 0
A( )
Amax( )
Amax( )
M
A(0)
A( 0 )
15.
Канонический алгоритм расчетанастроек регуляторов
Алгоритм расчета настроек регуляторов для объекта, заданного кривой
отклика имеет ряд шагов:
задание целевых характеристик расчета (запас устойчивости, показатели
качества);
выбор формы передаточной функции объекта;
выбор метода определения параметров объекта;
выбор типа регулятора;
расчет настроек регулятора;
проверка оптимальности настроек расчетом прямых (косвенных);
показателей качества и сравнения с допустимыми значениями.
16.
Задание целевых характеристикНеобходимые
задаются
в
показатели
техническом
качества
в
контуре
регламенте.
Это
допустимость/недопустимость статической ошибки,
допустимое значение перерегулирования (отклонение
от номинального значения параметра), длительность
переходных процессов при изменении режима работы
контура.
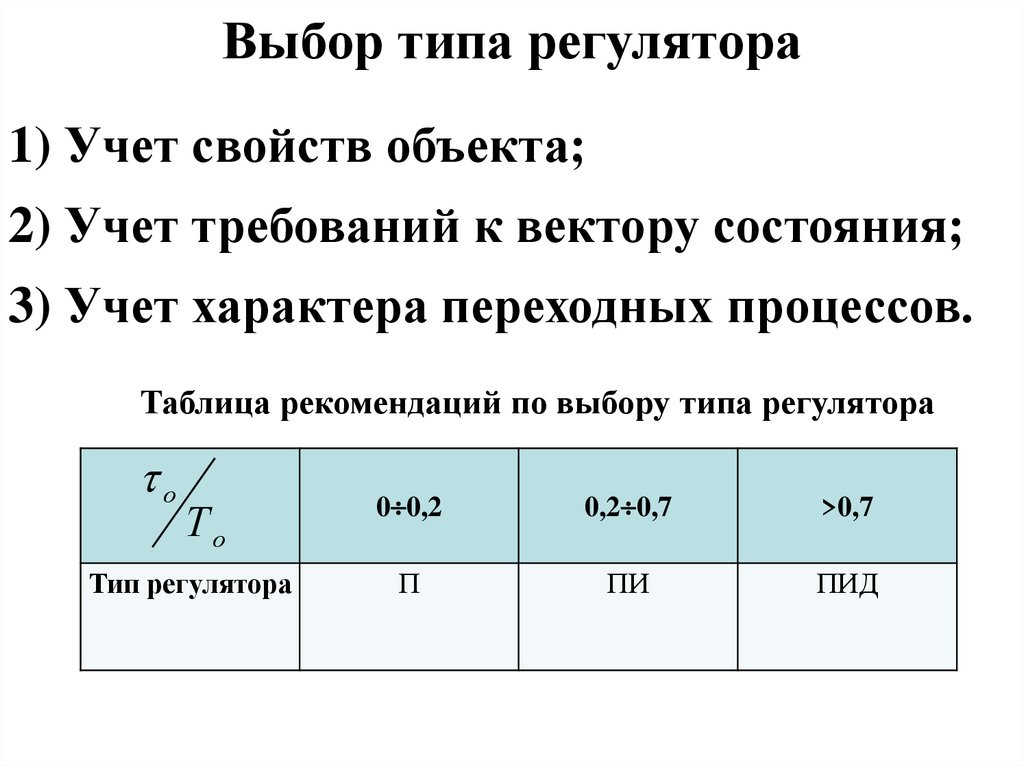
17.
Выбор типа регулятора1) Учет свойств объекта;
2) Учет требований к вектору состояния;
3) Учет характера переходных процессов.
Таблица рекомендаций по выбору типа регулятора
о
То
0 0,2
0,2 0,7
>0,7
Тип регулятора
П
ПИ
ПИД
18.
Определение передаточной функциипо кривой отклика
Для определения передаточной функции объекта
используются различные приемы, один из них
основывается на информации о поведении объекта в
нестационарных режимах. Например, при изменении
тех или иных управляющих воздействий в процессе
работы объекта.
Реакция системы на частичное ступенчатое
изменение управляющего воздействия называется
кривой отклика или разгонной характеристикой. Она
сохраняет особенности переходной характеристики
поэтому может использоваться для расчета
параметров объекта
19.
Получение кривой отклика1. Фиксируется установившееся значение
входной и выходной величины (u0; x0)
2. В момент времени t0 изменяется
значение u0 на 10 – 20% от u0 , т.е. новое
значение скачком устанавливается
(1,1 – 1,2) u0 или (0,8-0,9)uо
3. После окончания переходного процесса
измеряется x1
20.
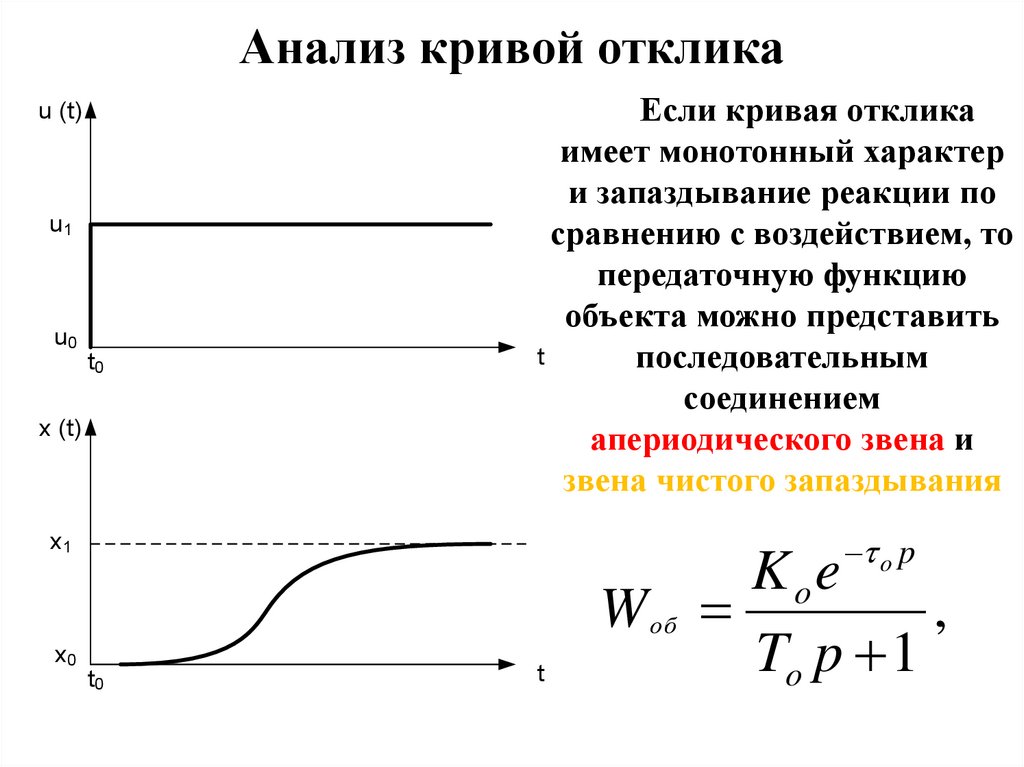
Анализ кривой откликаu (t)
u1
u0
t0
x (t)
Если кривая отклика
имеет монотонный характер
и запаздывание реакции по
сравнению с воздействием, то
передаточную функцию
объекта можно представить
t
последовательным
соединением
апериодического звена и
звена чистого запаздывания
o p
x1
x0
t0
t
Koe
W об
,
To p 1
21.
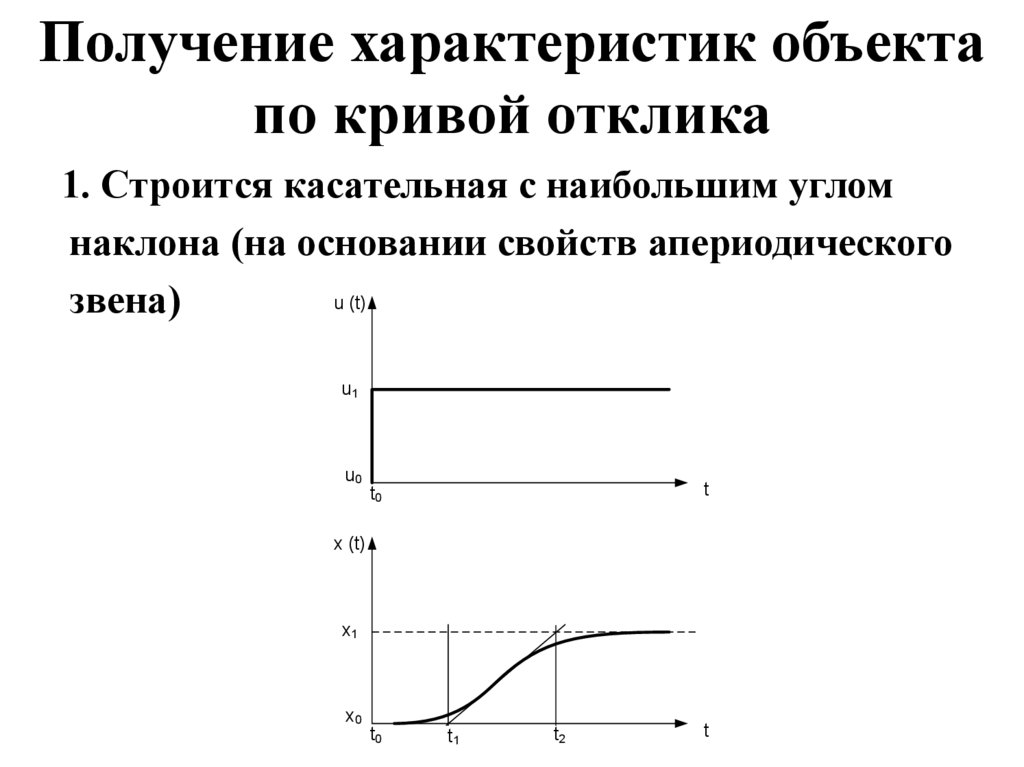
Получение характеристик объектапо кривой отклика
1. Строится касательная с наибольшим углом
наклона (на основании свойств апериодического
u (t)
звена)
u1
u0
t
t0
x (t)
x1
x0
t0
t1
t2
t
22.
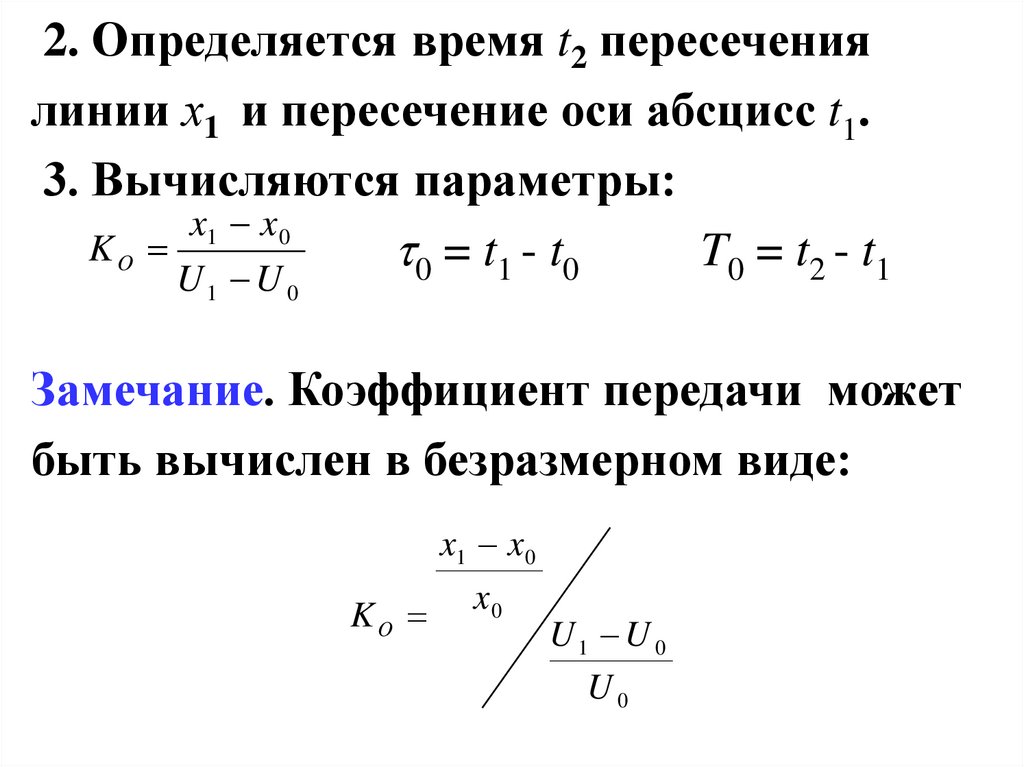
2. Определяется время t2 пересечениялинии х1 и пересечение оси абсцисс t1.
3. Вычисляются параметры:
x1 x 0
KO
0 = t1 - t0
T0 = t2 - t1
U1 U 0
Замечание. Коэффициент передачи может
быть вычислен в безразмерном виде:
KO
x1 x 0
x0
U1 U 0
U0
23.
Расчет настроек Зиглера–Никольсапо кривой отклика
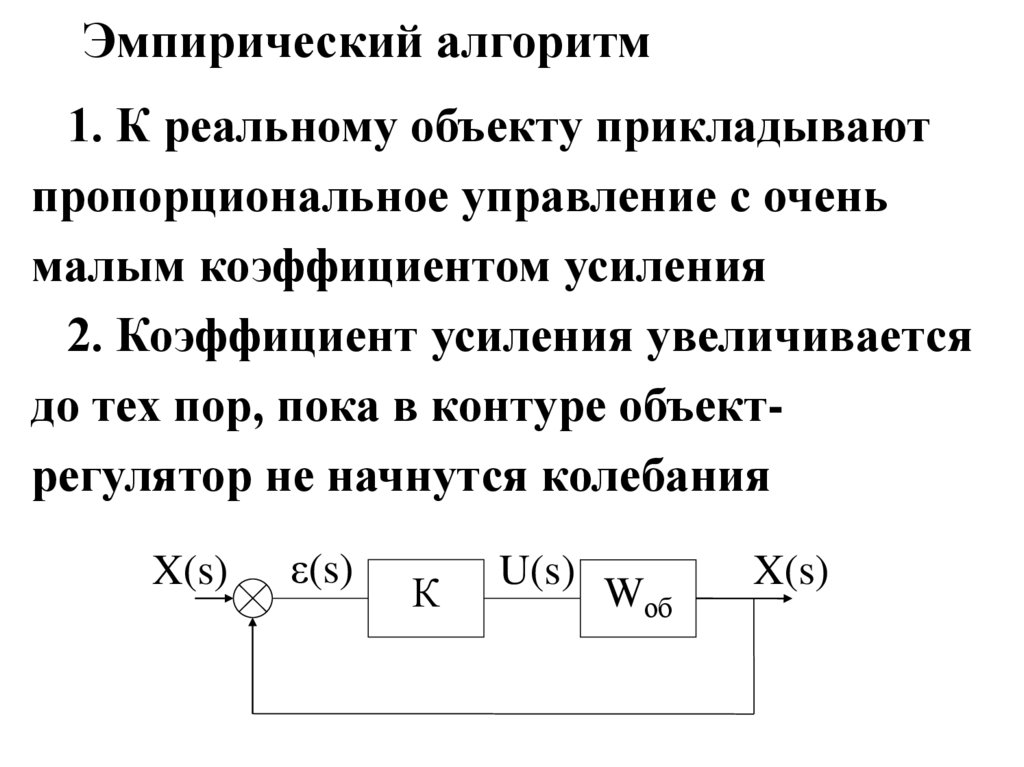
1. Задаются определенной скоростью
затухания переходного процесса x(t); в
данном методе ее принимают равной 4
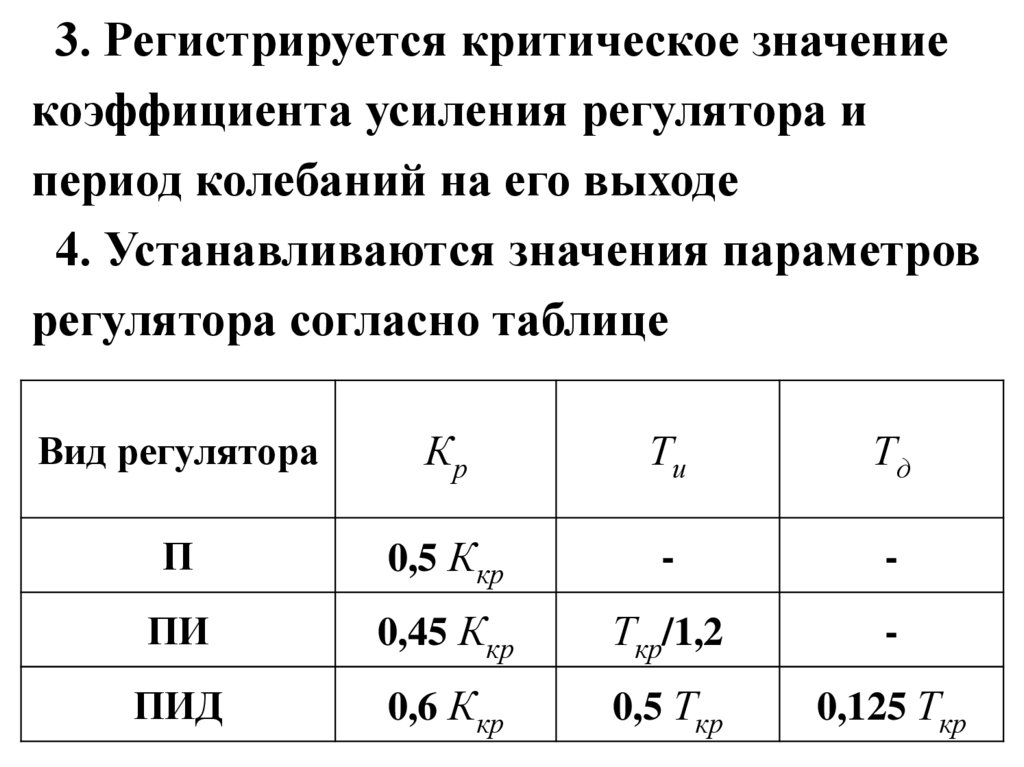
2. Настройки рассчитывают согласно
таблицы, приведенной далее
Замечание. Запас устойчивости в данном
методе обеспечивается формулой для
расчета коэффициента передачи регулятора
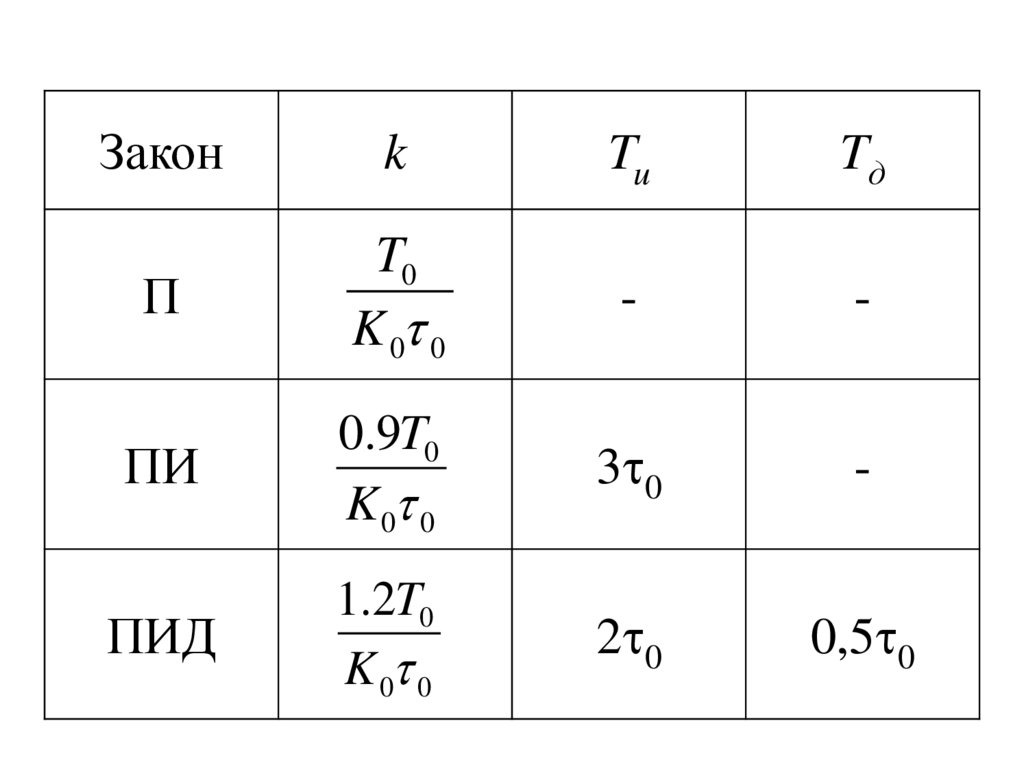
24.
Законk
Tu
Tд
П
T0
K 0 0
-
-
ПИ
0.9T0
K 0 0
3 0
-
ПИД
1.2T0
K 0 0
2 0
0,5 0
25.
ЗамечаниеПеререгулирование и время
регулирования в системе в значительной
0
степени зависят от отношения T0 . Чем оно
меньше, тем больше и tp
Данная особенность учитывается в методе
Коэна-Куна
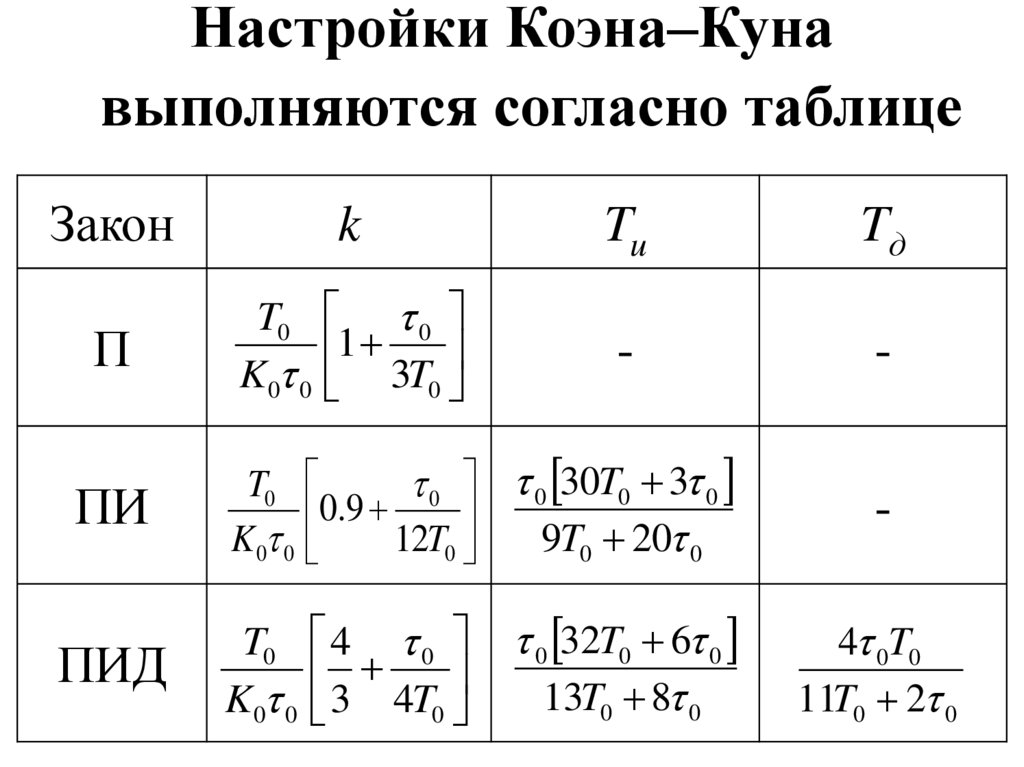
26.
Настройки Коэна–Кунавыполняются согласно таблице
Закон
k
Tu
Tд
П
T0 0
1
K 0 0 3T0
-
-
ПИ
T0
0 0 30T0 3 0
0.9
K 0 0
12T0
9T0 20 0
ПИД
T0 4 0
K 0 0 3 4T0
0 32T0 6 0
13T0 8 0
4 0T0
11T0 2 0
27.
Графо-аналитический методРасчет настроек непрерывных
регуляторов по частотному
показателю колебательности
Применяется только при наличии
интегрального звена в контуре
регулирования
28.
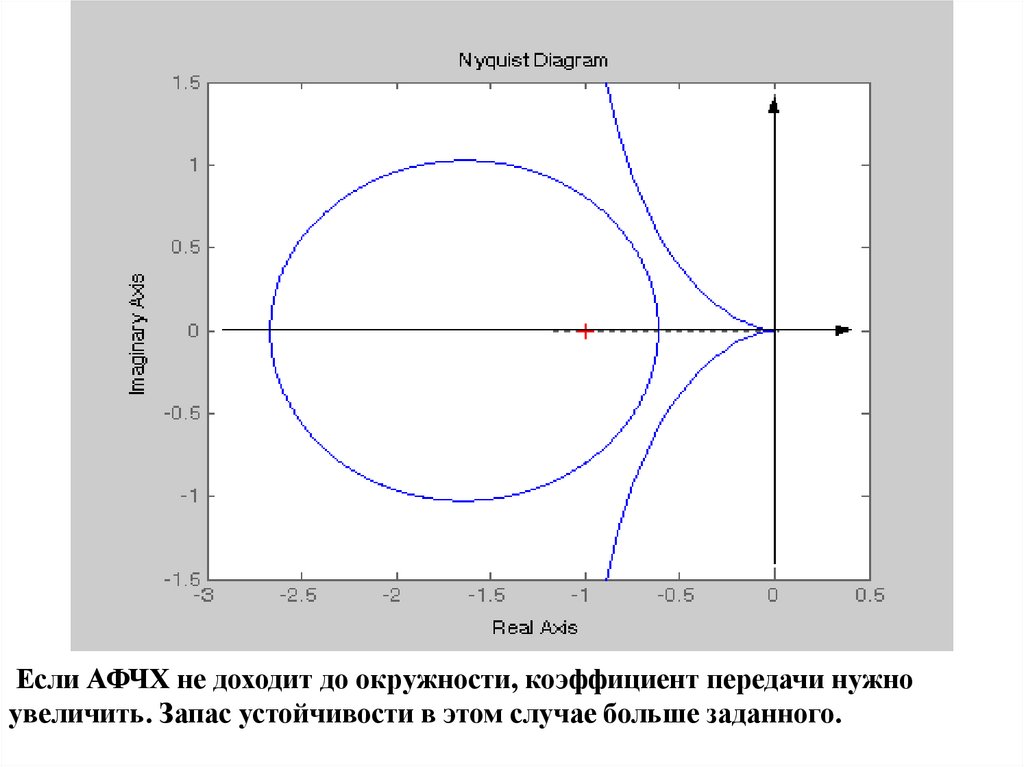
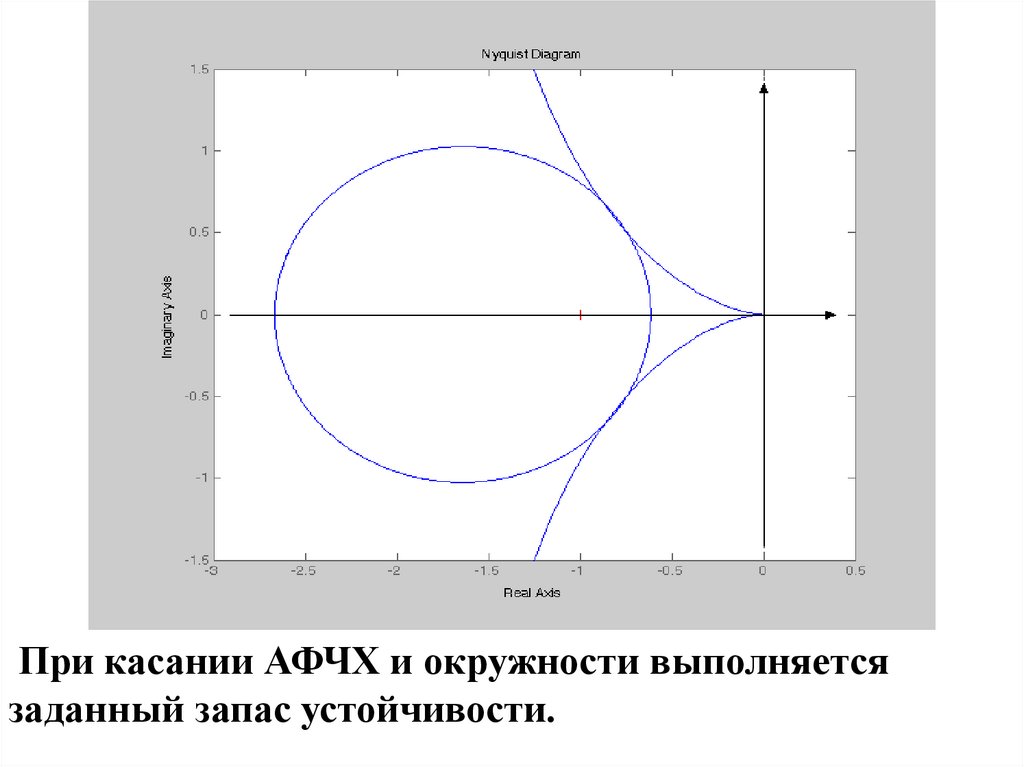
Частотный показатель колебательности М определяется как отношение максимальногозначения амплитудно-частотной
характеристики замкнутой системы (при
резонансной частоте) к её значению при ω=0
M
( j ) max
(0)