 physics
physicsSimilar presentations:







")


Тема 7. Качество непрерывных линейных систем автоматического управления. Лекция 12. Показатели качества переходного процесса
1.
Тема 7КАЧЕСТВО НЕПРЕРЫВНЫХ ЛИНЕЙНЫХ СИСТЕМ
АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ
Лекция 12
Показатели качества переходного процесса.
Оценка качества регулирования САУ в установившемся
режиме. Теоремы о конечном значении.
Расчет установившихся ошибок статических САУ
2.
Анализ устойчивости САУ необходим для установления факта затухания переходногопроцесса. Устойчивость является необходимым, но недостаточным условием
работоспособности системы, поэтому в ТАУ, наряду с оценкой устойчивости решается
задача обеспечения требуемого качества процесса управления.
Анализ качества сводится к расчёту показателей качества переходного процесса:
быстродействия, колебательности и перерегулирования, а также к расчёту установившихся
ошибок, определяющих точность работы системы.
Показатели качества переходного процесса.
К основным показателям качества переходного процесса относятся
перерегулирование , время регулирования t p , время нарастания t н , число
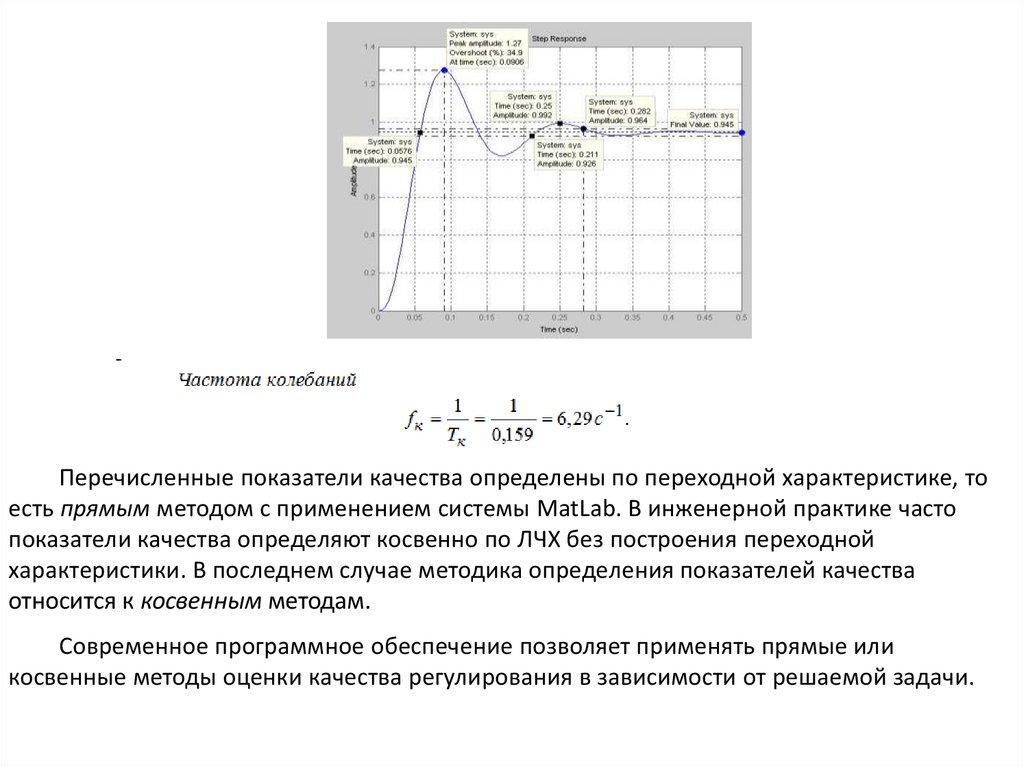
колебаний N к , частота колебаний f к . Перечисленные показатели определяются по
переходной характеристике, которая является графиком переходной функции.
Для инженерной практики особый интерес представляет порядок определения
показателей качества с применением моделирующих программ. Рассмотрим процесс
определения показателей качества на примере системы стабилизации частоты
синхронного генератора, ССДМ которой изображена на рис. 2.48.
3.
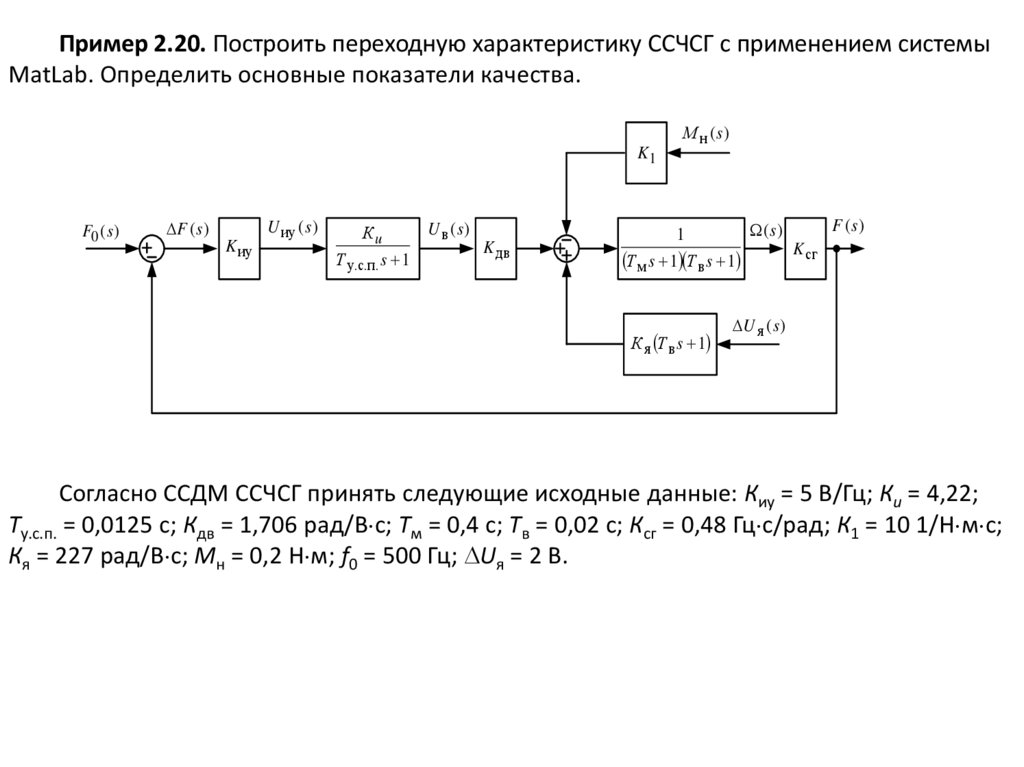
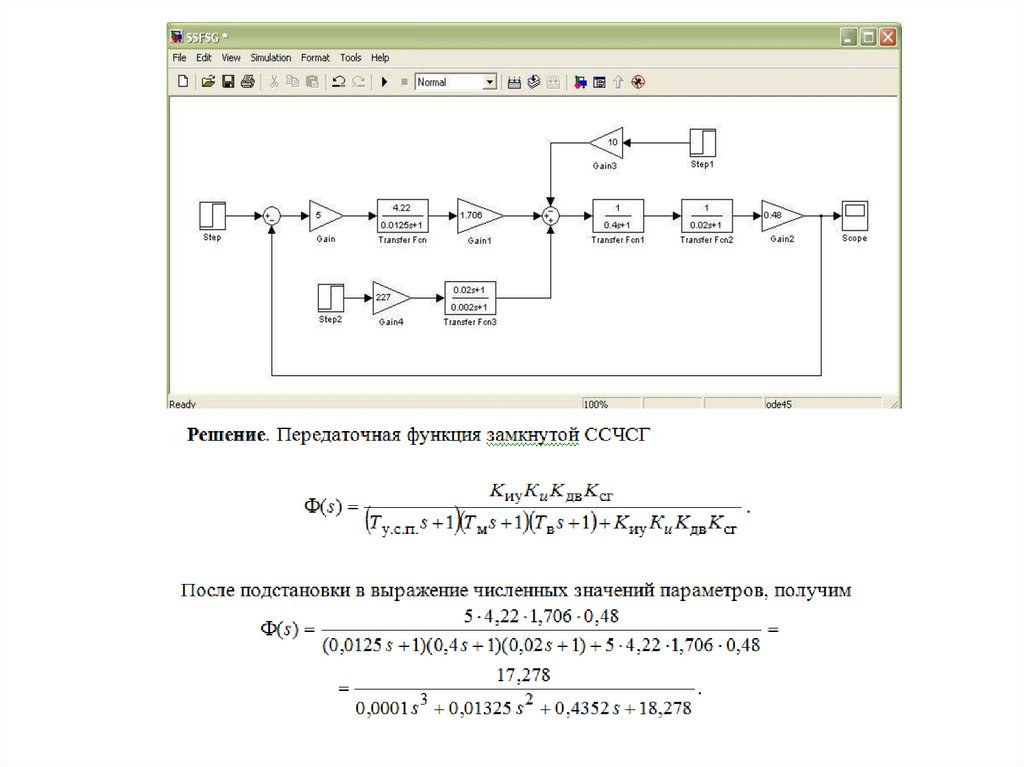
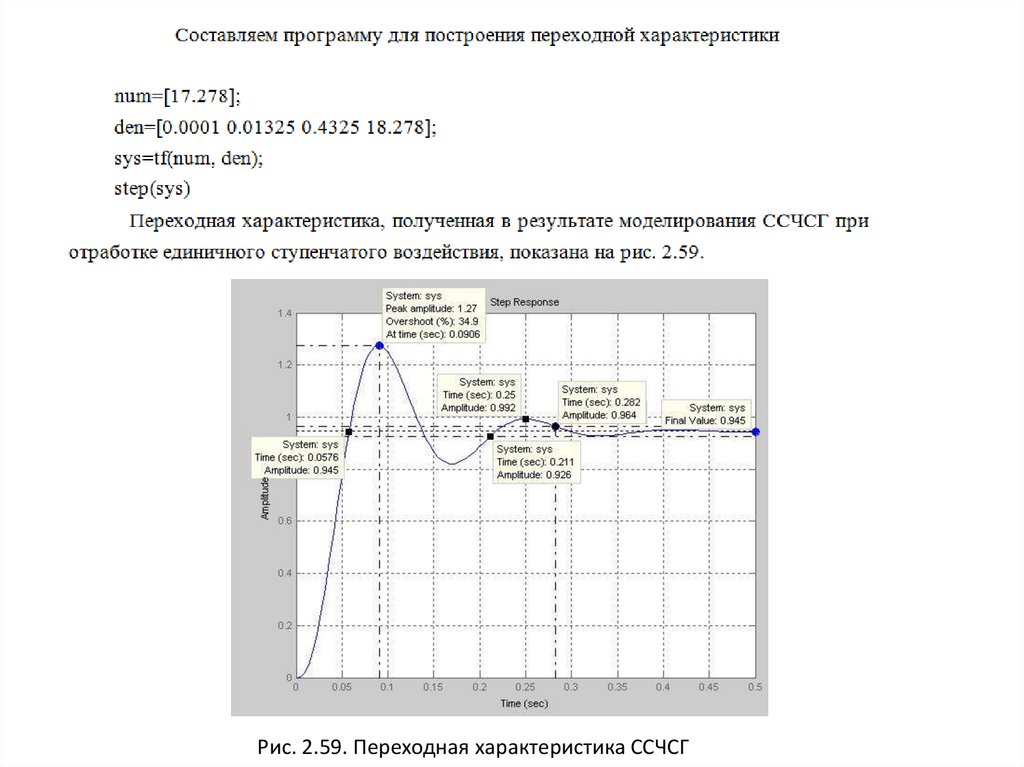
Пример 2.20. Построить переходную характеристику ССЧСГ с применением системыMatLab. Определить основные показатели качества.
K1
F0 ( s )
F (s )
K иу
U иу ( s )
U в (s)
Кu
K дв
Т у.с.п. s 1
М н (s)
(s )
1
K сг
Т м s 1 Т в s 1
К я Т в s 1
F (s )
U я ( s )
Согласно ССДМ ССЧСГ принять следующие исходные данные: Киу = 5 В/Гц; Кu = 4,22;
Ту.с.п. = 0,0125 с; Кдв = 1,706 рад/В с; Тм = 0,4 с; Тв = 0,02 с; Ксг = 0,48 Гц с/рад; К1 = 10 1/Н м с;
Кя = 227 рад/В с; Мн = 0,2 Н м; f0 = 500 Гц; Uя = 2 В.
4.
5.
Рис. 2.59. Переходная характеристика ССЧСГ6.
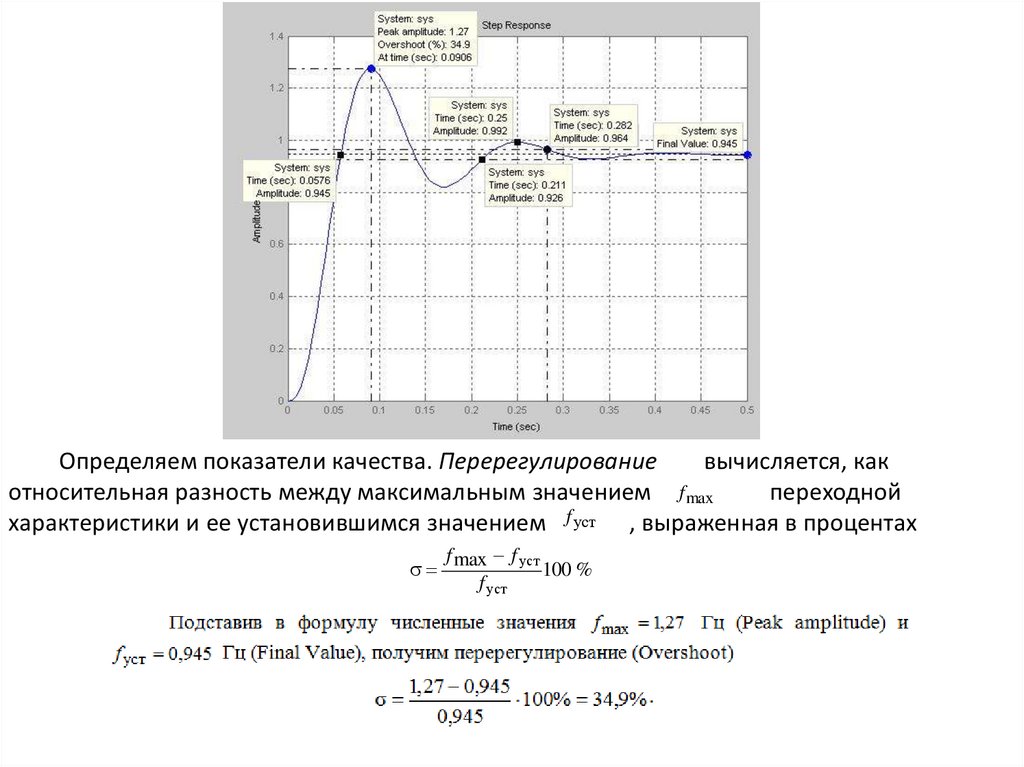
Определяем показатели качества. Перерегулированиевычисляется, как
относительная разность между максимальным значением f max
переходной
характеристики и ее установившимся значением f уст , выраженная в процентах
f
f уст
max
100 %
f уст
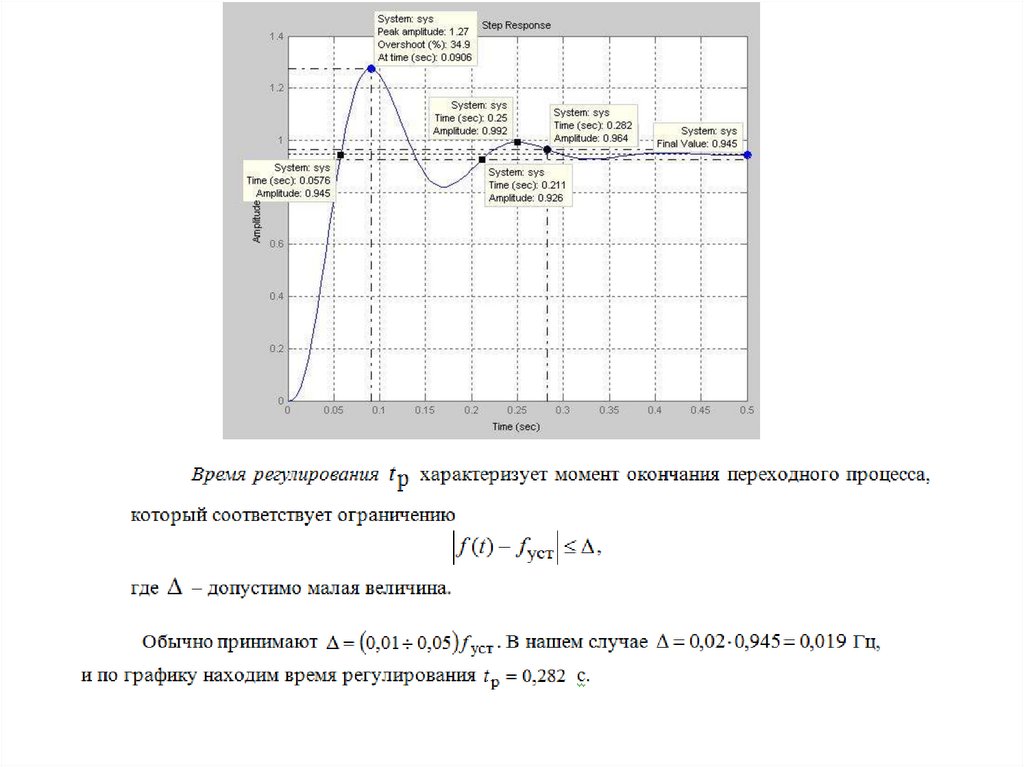
7.
8.
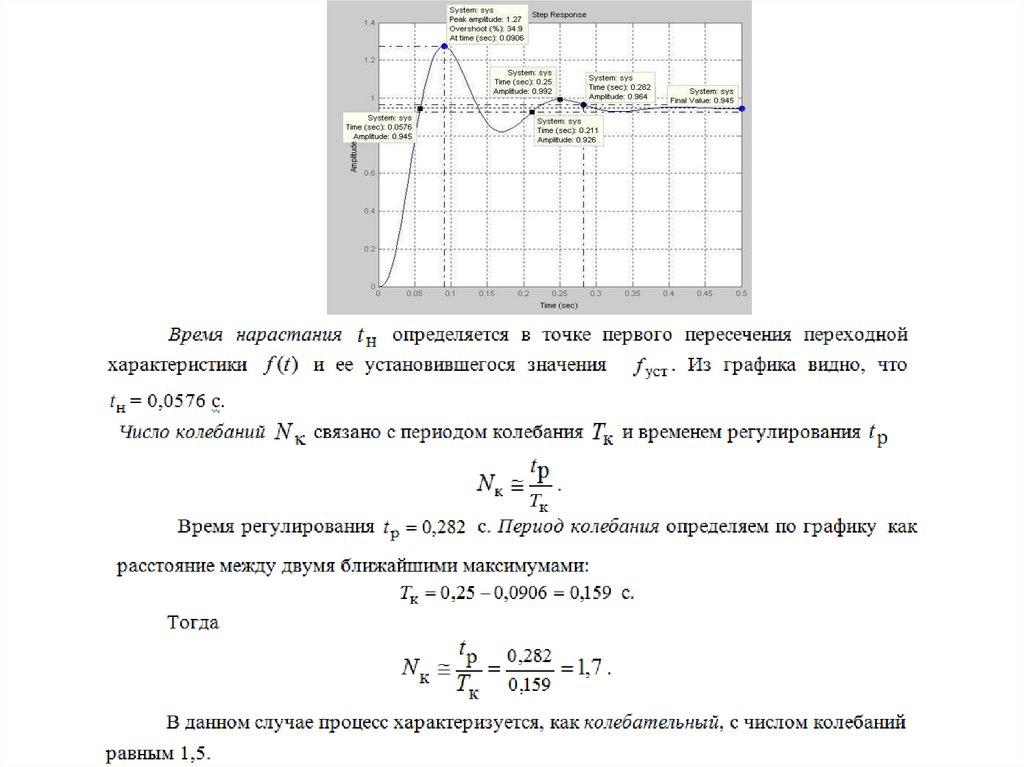
9.
Перечисленные показатели качества определены по переходной характеристике, тоесть прямым методом с применением системы MatLab. В инженерной практике часто
показатели качества определяют косвенно по ЛЧХ без построения переходной
характеристики. В последнем случае методика определения показателей качества
относится к косвенным методам.
Современное программное обеспечение позволяет применять прямые или
косвенные методы оценки качества регулирования в зависимости от решаемой задачи.
10.
Оценка качества регулирования в установившемся режиме.Теоремы о конечном значении.
Ранее было показано, что выходную координату линейной непрерывной
стационарной САУ можно записать в виде суммы переходной и установившейся
составляющих
y (t ) yп (t ) y уст (t )
Для оценки показателей качества переходного процесса необходимо получить
график переходной составляющей yп (t ) .Точность работы САУ в установившемся режиме
зависит от величины второго слагаемого y уст (t ) и оценивается по значению
установившейся ошибки uуст (t ) .
Основным показателем качества работы системы в установившемся режиме является
точность, оцениваемая величиной установившейся ошибки при различных типовых
внешних воздействиях. Эту ошибку, в отличии от инструментальной (приборной),
называют методической (структурной) ошибкой.
Ее можно определить с помощью теоремы о конечном значении
u уст lim u (t ) lim s U ( s )
t
s 0
В соответствии с передаточными функциями относительно ошибок для линейных
систем применяется принцип суперпозиции, на основании которого суммируются
составляющие изображений ошибок U ( s) U ( s) U ( s)
u
f
где U u (s) – составляющая ошибки относительно задающего воздействия; U f (s )
составляющая ошибки относительно возмущающего воздействия.
–
11.
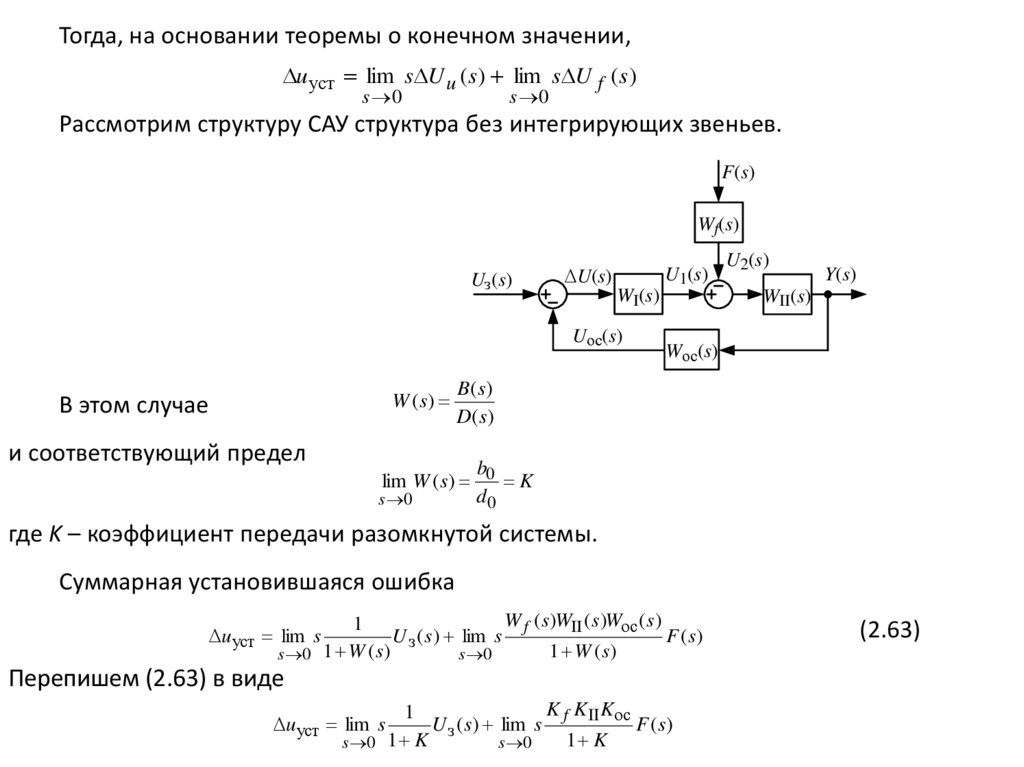
Тогда, на основании теоремы о конечном значении,u уст lim s U u ( s ) lim s U f ( s )
s 0
s 0
Рассмотрим структуру САУ структура без интегрирующих звеньев.
F(s)
Wf(s)
Uз(s)
U(s)
U1(s)
WI(s)
Uос(s)
W ( s)
В этом случае
и соответствующий предел
U2(s)
Y(s)
WII(s)
Wос(s)
B( s )
D( s )
b
lim W ( s) 0 K
d0
s 0
где K – коэффициент передачи разомкнутой системы.
Суммарная установившаяся ошибка
W f ( s )WII ( s )Wос ( s )
1
U з ( s ) lim s
F (s)
1 W (s)
s 0 1 W ( s )
s 0
u уст lim s
Перепишем (2.63) в виде
K f K II Kос
1
U з ( s) lim s
F ( s)
1 K
s 0 1 K
s 0
uуст lim s
(2.63)
12.
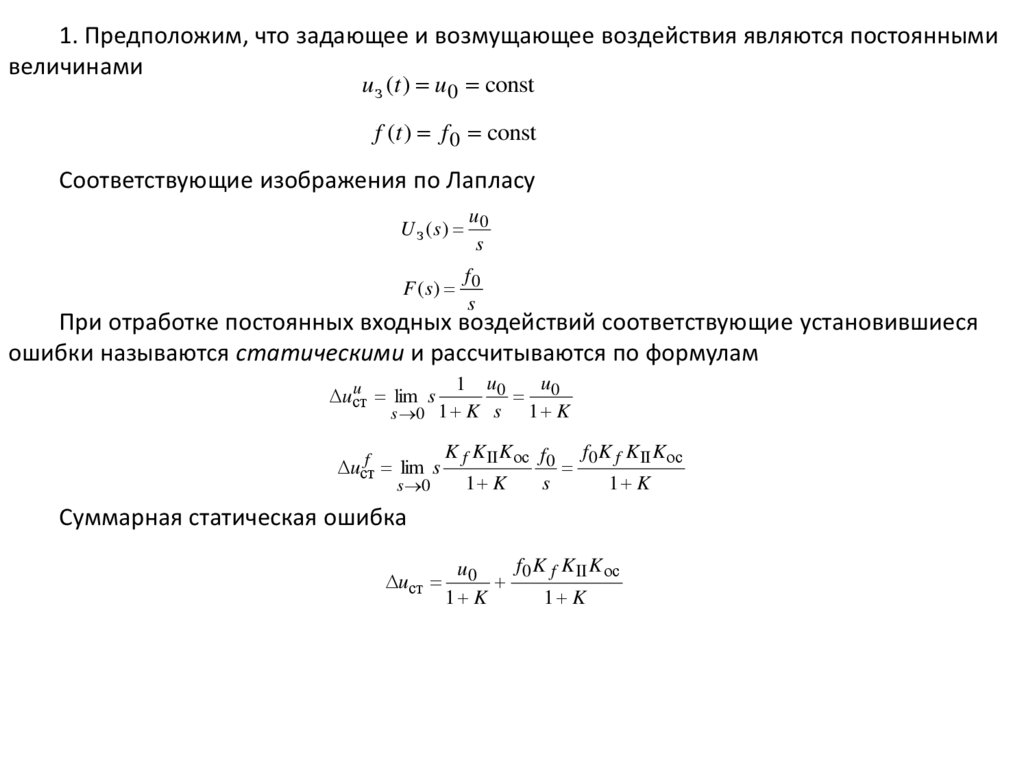
1. Предположим, что задающее и возмущающее воздействия являются постояннымивеличинами
u з (t ) u 0 const
f (t ) f 0 const
Соответствующие изображения по Лапласу
u
U з ( s) 0
s
f
F ( s) 0
s
При отработке постоянных входных воздействий соответствующие установившиеся
ошибки называются статическими и рассчитываются по формулам
u
1 u0
0
1 K
s 0 1 K s
u
uст
lim s
f
uст
lim s
s 0
K f K II Kос f0
1 K
s
f0 K f K II Kос
1 K
Суммарная статическая ошибка
uст
f 0 K f K II K ос
u0
1 K
1 K
13.
u1 u0
0
1 K
s 0 1 K s
u
uст
lim s
f
uст
lim s
s 0
uст
K f K II Kос f0
1 K
s
f0 K f K II Kос
1 K
f 0 K f K II K ос
u0
1 K
1 K
Из этих формул видно, что статические ошибки по задающему и возмущающему
1
воздействиям пропорциональны величине этих воздействий и величине
,
1 K
называемой коэффициентом статизма, который обратно пропорционален коэффициенту
усиления разомкнутой системы.
Статические ошибки можно уменьшить только за счет увеличения коэффициента
передачи участка цепи от входа до точки приложения внешнего воздействия (KI).
Однако увеличение KI приводит к увеличению коэффициента передачи разомкнутой
системы (K) и, следовательно, к уменьшению запаса устойчивости.
Заметим также, что система, у которой статическая ошибка не равна нулю называется
статической.