









 mechanics
mechanicsSimilar presentations:










Тема 3. Блоки управления и позиционирования БПЛА. Занятие 6. Модульный центральный компьютер (MCPA). Блок ввода-вывода (SIOC)
1. Старший преподаватель: майор Кутузов Андрей Станиславович
Цикл: Подготовки специалистов на комплексы с беспилотнымилетательными аппаратами средней дальности и
большой продолжительности полета.
Дисциплина: Конструкция и эксплуатация комплекса с БПЛА
средней дальности «Форпост».
Тема 3.
Блоки управления и
позиционирования БПЛА.
Занятие 6.
Модульный центральный компьютер (MCPA).
Блок ввода-вывода (SIOC).
Старший преподаватель: майор Кутузов Андрей Станиславович
2.
Объяснить назначение модульногоцентрального компьютера MCPA.
Описать состав и блок-схему MCPA.
Объяснить назначение блока SIOC,
описать блок-схему.
Перечислить интерфейсы MCPA.
Назвать режимы полета БПЛА.
3.
Вопрос 1. Назначение и состав модульногоцентрального компьютера.
Вопрос 2. Усовершенствованный модуль
авионики (UMAM).
Вопрос 3. Блок ввода – вывода (SIOC).
Вопрос 4. Интерфейсы модульного
центрального компьютера.
4.
Вопрос 1.Назначение и состав
модульного центрального
компьютера (MCPA).
5.
Назначение и состав модульного центральногокомпьютера (MCPA).
5
Модульный центральный
компьютер (MCPA) предназначен:
управления полетом БПЛА
(обеспечения различных режимов полета);
передачи отчетов по каналу DNL на НСУ;
обеспечения контроля
работоспособности всех систем БПЛА;
6.
Назначение и состав модульного центральногокомпьютера (MCPA).
6
Модульный центральный компьютер
(MCPA) предназначен:
управления и выдачи команд в
процессоры контроля и связи;
проведения самодиагностики БПЛА;
обеспечения дублирование датчиков.
7.
Назначение и состав модульного центральногокомпьютера (MCPA).
7
8.
Назначение и состав модульного центральногокомпьютера (MCPA).
МОДУЛЬНЫЙ ЦЕНТРАЛЬНЫЙ
КОМПЬЮТЕР (MCPA)
8
9.
Назначение и состав модульного центральногокомпьютера (MCPA).
9
MCPA очень чувствителен к
статическому напряжению.
Пальцами к контактам разъемов
MCPA категорически
запрещается прикасаться.
10.
Назначение и состав модульного центральногокомпьютера (MCPA).
10
Система авионики представляет собой
централизованную систему,
все функции которой контролируются
программами, встроенными в
активный бортовой компьютер (AVC)
11.
Назначение и состав модульного центральногокомпьютера (MCPA).
СОСТАВ MCPA :
два вычислителя AVC 1 и AVC 2;
2 платы ЦПУ
(тактовая частота 22 MГц,
ОЗУ – 512 Кбайт,
флэш-память – 2МБ,
интерфейс связи – RS 422,);
2 платы входов/выходов;
2 модуля питания;
две платы GPS;
блок датчиков воздушных данных
ADU.
11
12.
Назначение и состав модульного центральногокомпьютера (MCPA).
Оба бортовых компьютера,
AVC 1 и AVC 2,
могут выполнять одинаковые
задачи, но в каждый момент
времени активен только один
из них, в то время как другой
находится в резерве.
12
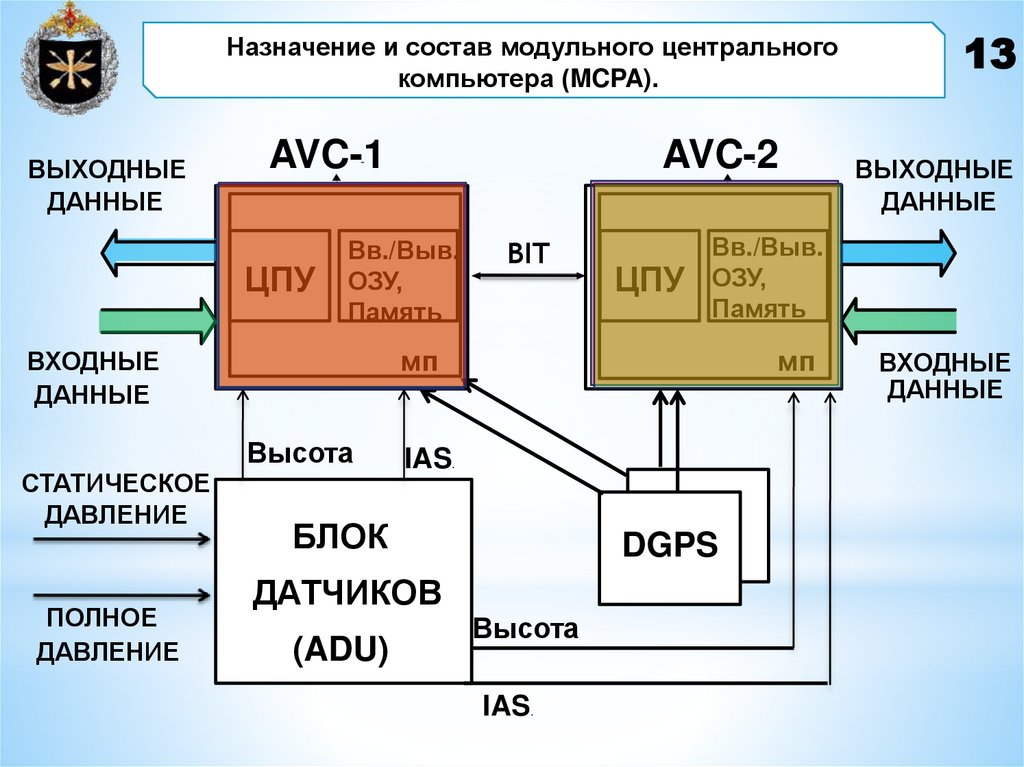
13.
Назначение и состав модульного центральногокомпьютера (MCPA).
ВЫХОДНЫЕ
ДАННЫЕ
AVC-1
ЦПУ
ПОЛНОЕ
ДАВЛЕНИЕ
-
Вв./Выв.
ОЗУ,
Память
BIT
ЦПУ
Высота
мп
IAS.
БЛОК
DGPS
ДАТЧИКОВ
(ADU)
Высота
IAS.
ВЫХОДНЫЕ
ДАННЫЕ
Вв./Выв.
ОЗУ,
Память
мп
ВХОДНЫЕ
ДАННЫЕ
СТАТИЧЕСКОЕ
ДАВЛЕНИЕ
AVC-2
-
13
ВХОДНЫЕ
ДАННЫЕ
14.
Назначение и состав модульного центральногокомпьютера (MCPA).
14
Основная подсистема, входящая в
состав MCPA
система управления БПЛА
(FCS).
FCS обеспечивает управление всеми
функциями, относящиеся
к полету БПЛА.
15.
Назначение и состав модульного центральногокомпьютера (MCPA).
15
Данная система получает команды
оператора и текущие полетные данные
БПЛА от датчиков, после обработки
которых подает сигнал на сервоприводы
для выполнения требуемой команды.
FCS осуществляет также резервное
дублирование в случае нарушения
работоспособности датчика или
сервоприводов
16.
ФУНКЦИОНАЛЬНАЯ СХЕМА АВТОПИЛОТАДатчики
Отчет состояния
соотв. датчиков
Команда управления
Полетная команда
приходит от ADT
Датчики
Отчет
FCS
16
MCPA обрабатывает
команду и статус
БПЛА
соответствующей
схемой управления
Команда сервопривода
Сервоприводы
MCPA
MCPA подает команды
на сервоприводы
17.
Вопрос 2.Усовершенствованный
модуль авионики UMAM.
18.
Усовершенствованный модуль авионики UMAM.18
Усовершенствованный модуль авионики
UMAM выполняет следующие функции:
обеспечивает аппаратное разделение
функций управления полезной нагрузкой;
управляет многоцелевой оптикоэлектронной стабилизированной
системой (MOSP) и ее функциями;
производит самодиагностику.
19.
Усовершенствованный модуль авионики UMAM.19
СОСТАВ UMAM :
2 вычислителя (МСС);
2 блока датчиков (не используется),
каждый из которых содержит:
- блок акселерометров;
- блок лазерных гироскопов;
- плату обработки GPS;
- магнитный компас;
2 модуля питания (используется только один).
20. Общий вид UMAM
2021.
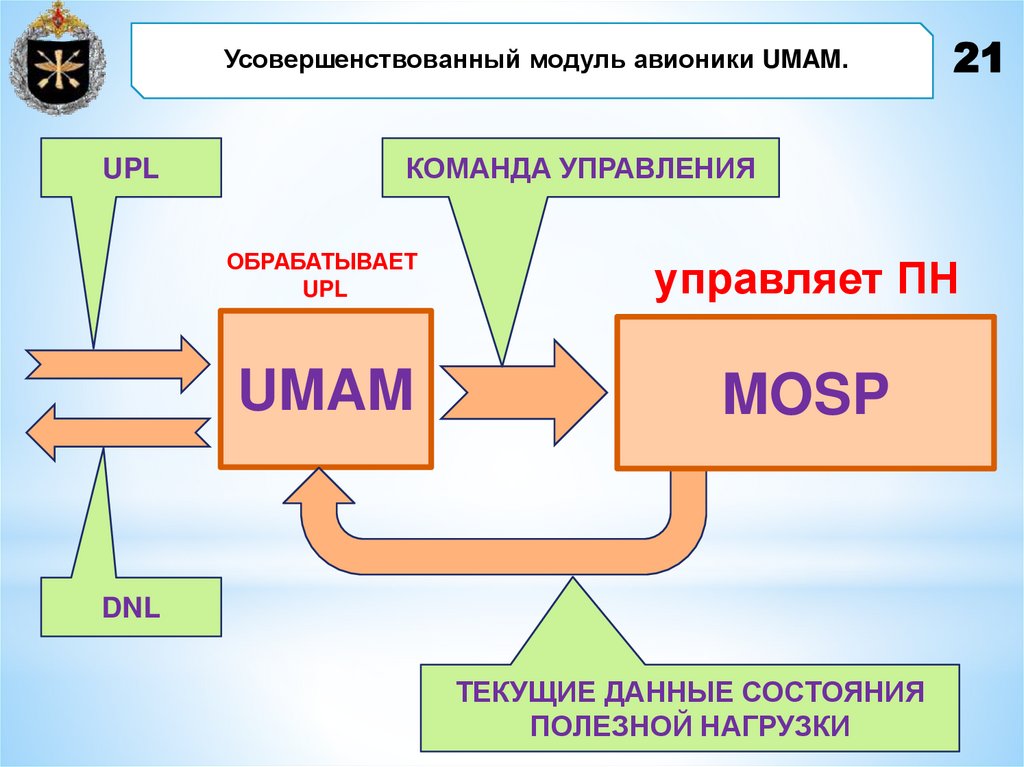
Усовершенствованный модуль авионики UMAM.UPL
21
КОМАНДА УПРАВЛЕНИЯ
ОБРАБАТЫВАЕТ
UPL
управляет ПН
UMAM
MOSP
DNL
ТЕКУЩИЕ ДАННЫЕ СОСТОЯНИЯ
ПОЛЕЗНОЙ НАГРУЗКИ
22. Блок-схема UDMU
RS-232 (TEST)DIGITAL
ANALOG
ETHERNET
22
AVC-1
COMM (8 X RS-422)
STATIC
SENSOR BLOCK
1
SENSOR BLOCK
2
(3 ACC, 3 RGU, FVU, GPS, ADU)
(3 ACC, 3 RGU, FVU, GPS, ADU)
TOTAL
PWR
PWR
RS-232 (TEST)
DIGITAL
ANALOG
ETHERNET
AVC-2
23.
Вопрос 3.Блок ввода вывода
SIOC
24.
Блок ввода вывода SIOC .24
SIOC выполняет следующие
функции:
сбор информации (не более 8
различных блоков) передача ее к
бортовым компьютерам AVC;
внутреннее резервирование при
возникновении неисправностей, для
чего блок SIOC разбит на 2 части
SIOC1/1 и SIOC1/2.
25.
Блок ввода вывода SIOC .SIOC выполняет следующие
функции:
преобразование различных
стандартов последовательного
интерфейса в стандарт RS-422.
25
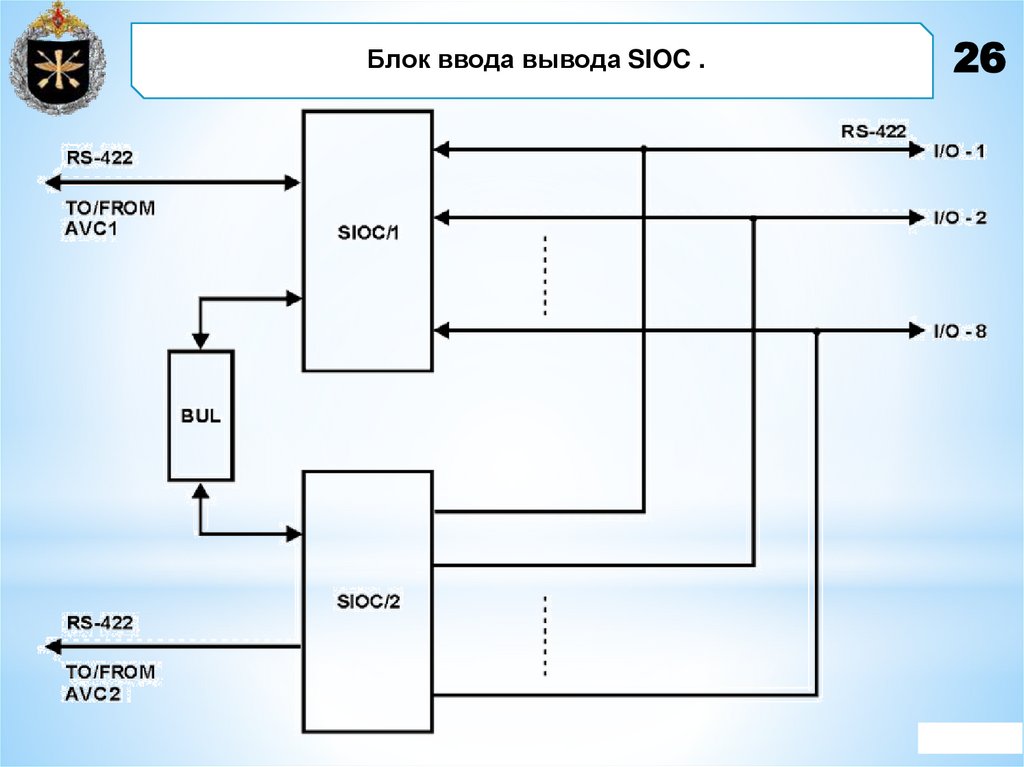
26.
Блок ввода вывода SIOC .26
27. Общий вид блока SIOC
2728.
Блок ввода вывода SIOC.Блок SIOC
(плата последовательного
ввода-вывода)
подключен к MCPA.
28
29.
Блок ввода вывода SIOC .SIOC принимает информацию от:
Данные пространственного
положения БПЛА от UDMU-2.
Положение направленной антенны
БПЛА.
Отчеты работоспособности EPD.
Навигационные данные ГЛОНАСС.
29
30.
Вопрос 4.Интерфейсы модульного
центрального компьютера.
31. Интерфейсы MCPA
3132. КОНТРОЛЬНЫЕ ВОПРОСЫ:
1. Перечислите предназначение модульногоцентрального компьютера.
2. Опишите функционирование схемы
автопилота.
3. Перечислите предназначение
усовершенствованного модуля авионики.
4. Назовите назначение и принцип работы
платы последовательного ввода-вывода.