











 mechanics
mechanics electronics
electronicsSimilar presentations:




")
. Блок ввода-вывода (SIOC)")




Тема 2. Многоцелевая оптико-электронная стабилизированная система. Занятие 1. Многоцелевая оптико-электронная стабилиз. система
1. Старший преподаватель: майор Кутузов Андрей Станиславович
Цикл: Подготовки специалистов на комплексы с беспилотнымилетательными аппаратами средней дальности и
большой продолжительности полета.
Дисциплина: Конструкция и эксплуатация комплекса с БПЛА
средней дальности «Форпост».
Тема 2.
Многоцелевая оптико-электронная
стабилизированная система.
Занятие 1.
Многоцелевая оптико-электронная
стабилизированная система.
Старший преподаватель: майор Кутузов Андрей Станиславович
2. Цели занятия
Перечислить назначение основных функцийоптико-электронной системы.
Перечислить состав оптико-электронной
системы и назначении ее компонентов.
Описать принцип стабилизации оптикоэлектронной системы с помощью динамически
настраиваемого гироскопа.
3.
Вопрос 1. Полезная нагрузка,устанавливаемая на БПЛА.
Предназначение и возможности
применения полезной нагрузки.
Вопрос 2. Описание и конструкция
многоцелевой оптико-электронной
стабилизированной системы.
Вопрос 3. Подвесы и двигатели
гиростабилизированной
платформы
4.
Вопрос 1.Полезная нагрузка БПЛА.
Предназначение и возможности
применения полезной нагрузки.
5.
Предназначение и возможности примененияполезной нагрузки.
В БПЛА возможно установить
два вида полезной нагрузки:
многоцелевая оптико-электронная
стабилизированная система (MOSP)
стационарный прибор с зарядовой связью
(CCD камера)
5
6.
Предназначение и возможности примененияполезной нагрузки.
6
ПН (MOSP) обеспечивает
ведение воздушной разведки в ночных
и дневных условиях,
управляется дистанционно с
усовершенствованной наземной
станции управления.
7.
Предназначение и возможности примененияполезной нагрузки.
7
Возможности ПН (MOSP):
обнаружение и идентификация целей
в дневных или ночных условиях;
сопровождение цели в ручном режиме
либо автоматическое сопровождения;
8.
Предназначение и возможности примененияполезной нагрузки.
Возможности ПН (MOSP):
выбор изображения в оптическом
диапазоне (ТВ) или ИК-диапазоне;
передача данных угла линии
визирования (LOS) относительно
главных осей БПЛА.
8
9.
Предназначение и возможности примененияполезной нагрузки.
9
Система MOSP
предоставляет отчеты о своём
состоянии и положении относительно
осей БПЛА в полете, обеспечивая для
УНСУ возможность расчета линии
визирования (координат перекрестия).
10.
1011.
12.
Предназначение и возможности примененияполезной нагрузки.
Угол обзора по азимуту
3600
Угол наклона по углу места
От + 100
до – 900
Масса – 28,5 кг.
12
13.
Вопрос 2.Описание конструкции
многоцелевой
оптико-электронной
стабилизированной системы.
14.
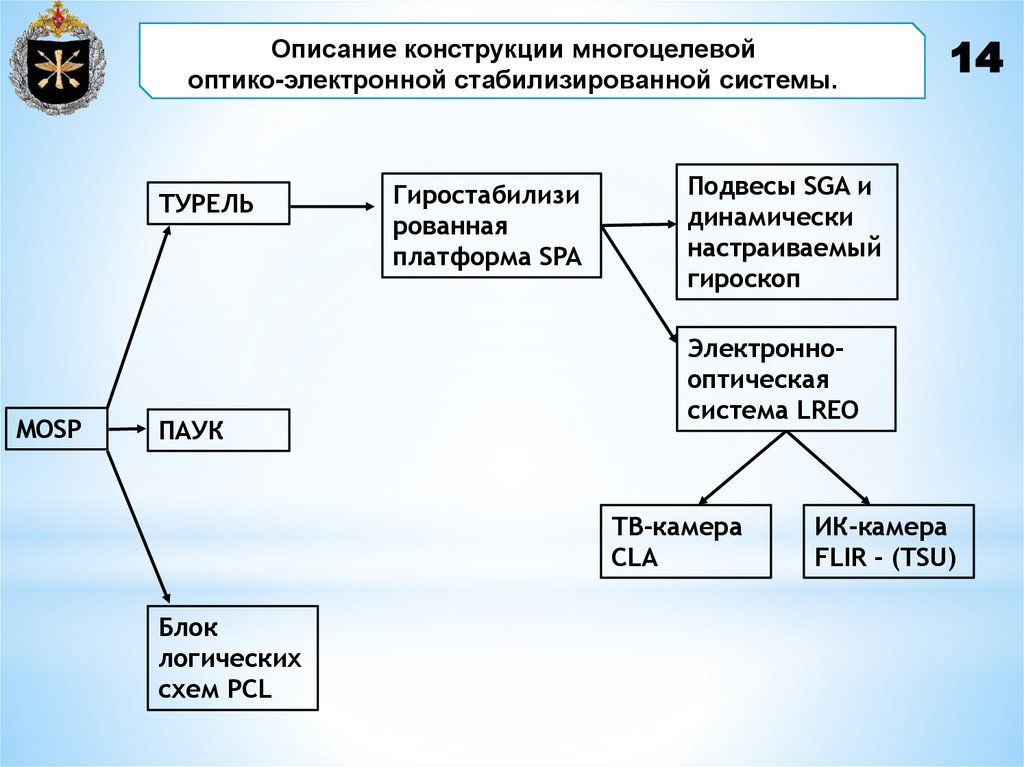
Описание конструкции многоцелевойоптико-электронной стабилизированной системы.
ТУРЕЛЬ
MOSP
ПАУК
Гиростабилизи
рованная
платформа SPA
Подвесы SGA и
динамически
настраиваемый
гироскоп
Электроннооптическая
система LREO
ТВ-камера
CLA
Блок
логических
схем PCL
14
ИК-камера
FLIR - (TSU)
15.
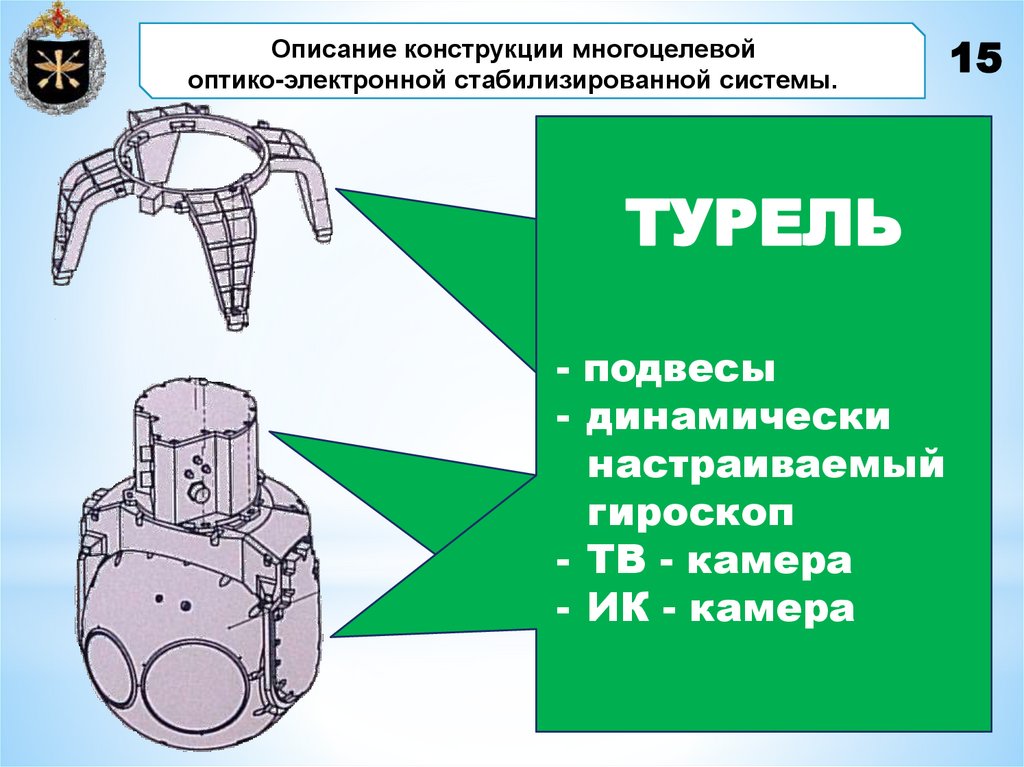
Описание конструкции многоцелевойоптико-электронной стабилизированной системы.
БЛОК
ЛОГИЧЕСКИХ
ТУРЕЛЬ
СХЕМ (PCL)
ПАУК
-- подвесы
Управление
подвесами
- динамически
(механическое
настраиваемый
крепление)
- Обмен
данными
гироскоп
с блоком UMAM
- ТВ - камера
-- ИК
- камера
Управление
камерой (ТВ-ИК)
15
16.
Описание конструкции многоцелевойоптико-электронной стабилизированной системы.
Гиростабилизированная
платформа (SPA)
16
17.
Описание конструкции многоцелевойоптико-электронной стабилизированной системы.
17
ИК- КАМЕРА
ТВ - КАМЕРА
18.
Описание конструкции многоцелевойоптико-электронной стабилизированной системы.
18
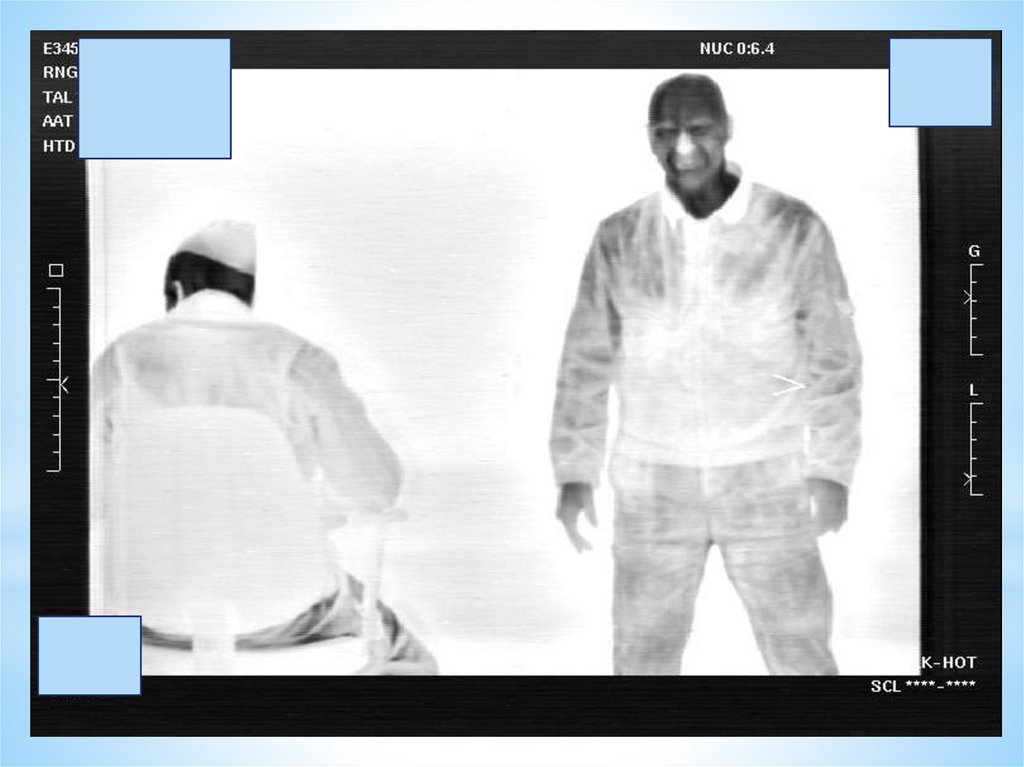
ИК-камера (FLIR, 3-5 мкм)
для съемки в ночных условиях,
сложных погодных условиях и
условиях пониженной видимости,
преобразует данные о температуре
в видеоизображение.
19.
Описание конструкции многоцелевойоптико-электронной стабилизированной системы.
19
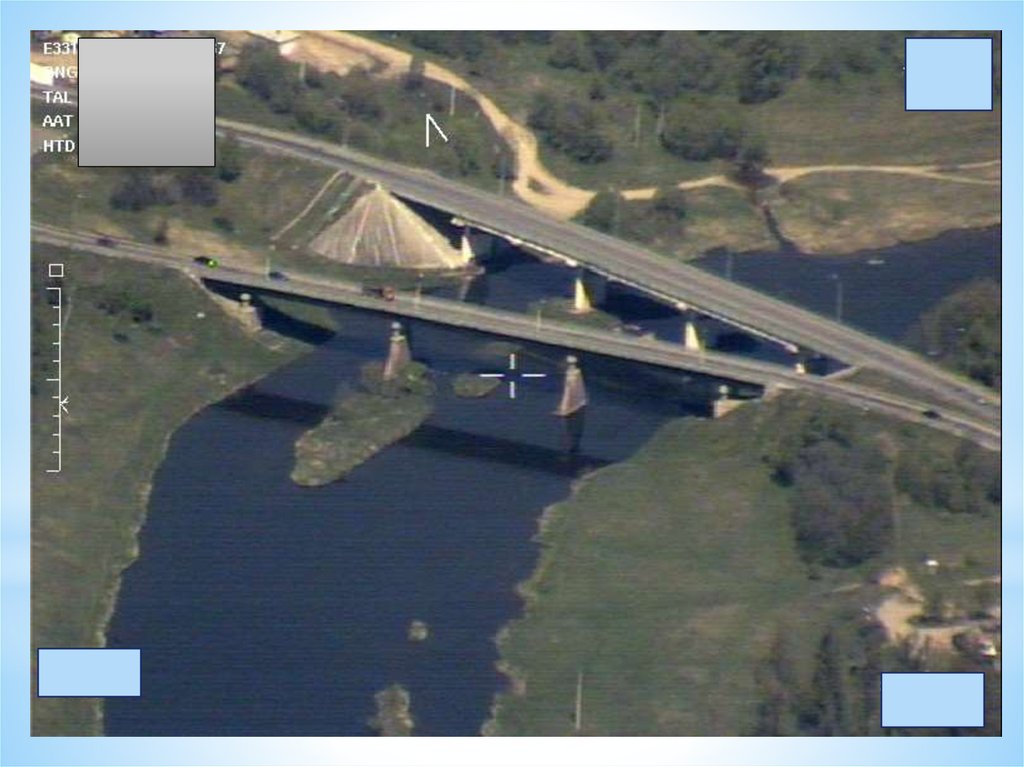
ТВ-камера (СLA, 0,4–0,7 мкм)
камера с объективом для дневной
видеосъемки.
Преобразует световые волны в
видеоизображение.
20. Состав полезной нагрузки
20Состав полезной нагрузки
AVDM
MOSP
AVT
VIDEO
COMMAND
VIDEO
REPORT
PCL
-Платформа
-Подвесы
-Гироскоп
SPA
COMMAND
LREO
UMAM
REPORT
COMMAND
COMMAND
REPORT
VIDEO
COMMAND
REPORT
VIDEO
FLIR – ИК-камера:
- Объектив; - YEU
- Узел FOV; - TSU;
- Отражатель
CLA – ТВ-камера:
- Объективы focus,
zoom, iris, extender
- ПЗС + плата улучш
21. Схема соединений полезной нагрузки
21УНСУ
БПЛА
НТПД
ВИДЕО
ВИДЕОМАТРИЦА
AVDM
ADT
Полезная нагрузка
ВИДЕО
ОТЧЕТ DNL
TLS
GVDM
+ ВИДЕО
RX
ОТЧЕТЫ
ОТЧЕТЫ
TX
ОТЧЕТ
OPBY
MCPA
КОМАНДА
TX
PCL
UMAM
КОМАНДЫ
RX
ВИДЕО
X2
UPL-1
КОМАНДЫ
TX
RX
UPL-2
EPS
SPA
22.
Вопрос 3.Подвесы и двигатели
гиростабилизированной
платформы (SPA)
23.
Подвесы и двигателигиростабилизированной платформы (SPA)
23
Стабилизация линии визирования
обеспечивается при помощи двух
комплектов подвесов:
подвес угла азимута (для
управления по курсу);
подвес угла места (для управления
по углу склонения).
24.
Подвесы и двигателигиростабилизированной платформы (SPA)
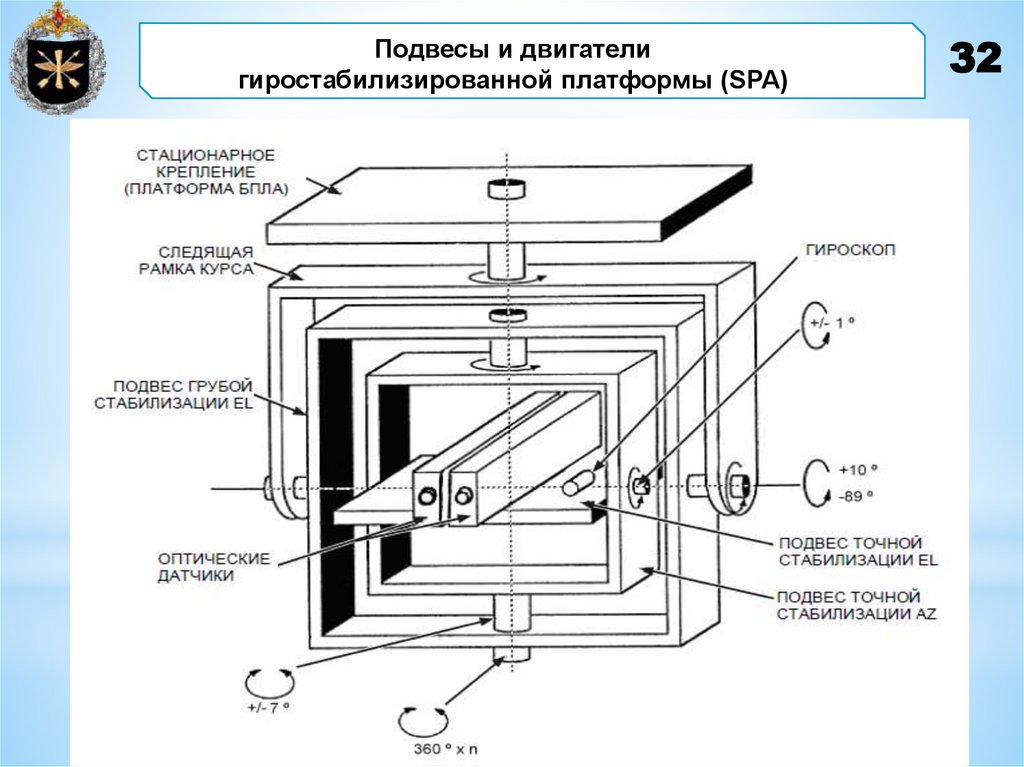
В состав каждой пары подвесов
входят:
- внешний (грубой стабилизации);
- внутренний (точной стабилизации).
24
25.
Подвесы и двигателигиростабилизированной платформы (SPA)
25
26.
Подвесы и двигателигиростабилизированной платформы (SPA)
26
Подвесы точной стабилизации
обеспечивают стабилизацию
линии визирования полезной
нагрузки.
27.
±2º по углу местаПодвесы и двигатели
гиростабилизированной платформы (SPA)
27
Перемещения подвесов
точной стабилизации
механически
ограничены в пределах
±7º по азимуту
28.
Подвесы и двигателигиростабилизированной платформы (SPA)
28
Подвесы грубой
стабилизации
повторяют
перемещения подвесов
точной стабилизации.
29.
Подвесы и двигателигиростабилизированной платформы (SPA)
Перемещения подвеса грубой
стабилизации:
по азимуту 360º
по углу склонения +10 до 90º
29
30.
Подвесы и двигателигиростабилизированной платформы (SPA)
Подвесы управляются
электронным блоком PCL.
30
31.
Подвесы и двигателигиростабилизированной платформы (SPA)
31
При подаче команды на поворот
камеры сигнал управления подается на
двигатели
внутренних подвесов.
Внутренние подвесы изменяют свое
положение, за ними начинают
отрабатывать внешние подвесы.
32.
Подвесы и двигателигиростабилизированной платформы (SPA)
32
33.
Подвесы и двигателигиростабилизированной платформы (SPA)
33
Динамически настраиваемый
гироскоп предназначен для
стабилизации линии визирования
полезной нагрузки.
34. Динамически настраиваемый гироскоп
34СОЛИНОИД
ДАТЧИК
35. ДИНАМИЧЕСКИ НАСТРАИВАЕМЫЙ ГИРОСКОП
Соленоид угла местаДатчик азимута
Соленоид азимута
Датчик угла места
36.
Подвесы и двигателигиростабилизированной платформы (SPA)
36
Датчик выполняет роль
чувствительного элемента, а
соленоид необходим для
удержания вращающейся
массы в заданной плоскости.
37.
Подвесы и двигателигиростабилизированной платформы (SPA)
37
При эволюциях ЛА изменяется
расстояние между вращающейся
массой и датчиком.
Сигналы с датчиков подаются на
соответствующие моторы для
стабилизации линии визирования.
38.
39.
40.
41.
42. КОНТРОЛЬНЫЕ ВОПРОСЫ:
1. Перечислите полезные нагрузкиустанавливаемые на БПЛА;
2. Перечислить возможности ПН (MOSP);
3. Перечислите состав ПН (MOSP);
4. Объясните принцип
стабилизации ПН (MOSP).
43. Задание на самоподготовку:
1. Руководство по описанию системыTM_(RU)SR-00-1 глава 2 стр. 8-9, глава 6
стр.1-12.
2. Доп. Руководство по летной
эксплуатации ТМ_(RU)SR-05-2 глава 2
стр. 39