


























 mechanics
mechanicsSimilar presentations:



. Блок ввода-вывода (SIOC)")





")
Тема 3. Датчики управления и позиционирования БПЛА. Занятие 5. Сервоприводы. Режимы полета БПЛА
1. Старший преподаватель: майор Кутузов Андрей Станиславович
Цикл: Подготовки специалистов на комплексы с беспилотнымилетательными аппаратами средней дальности и
большой продолжительности полета.
Дисциплина: Конструкция и эксплуатация комплекса с БПЛА
средней дальности «Форпост».
Тема 3.
Датчики управления и
позиционирования БПЛА.
Занятие 5.
Сервоприводы. Режимы полета БПЛА.
Старший преподаватель: майор Кутузов Андрей Станиславович
2.
Перечислить назначение сервоприводов.Перечислить количество сервоприводов
БПЛА и их размещение.
Описать блок-схему сервоприводов.
Объяснить принцип резервирования
сервоприводов
Перечислить и описать режимы полета
БПЛА.
Перечислить и описать режимы работы
автопилота БПЛА.
3.
Вопрос 1. Описание сервоприводов БПЛА.Блок схема сервопривода,
описание работы..
Вопрос 2. Резервное дублирование
сервоприводов БПЛА.
Вопрос 3. Режимы полета БПЛА.
4.
Вопрос 1.Описание сервоприводов
БПЛА.
Блок-схема,
описание работы.
5.
Описание сервоприводов БПЛА.Блок-схема, описание работы.
Система управления ЛА управляет
программным модулем автопилота,
выполняющим наведение и
стабилизацию БПЛА.
5
6.
Описание сервоприводов БПЛА.Блок-схема, описание работы.
Данные датчиков управления
полетом БПЛА сравниваются с
командами, обрабатываются через
схему автопилота и выполняется
маневрирование БПЛА посредством
сервоприводов.
6
7.
Описание сервоприводов БПЛА.Блок-схема, описание работы.
Сервопривод
servus (от латинского) — слуга, помощник,
привод
— механический привод с
автоматической
коррекцией состояния
7
8.
Описание сервоприводов БПЛА.Блок-схема, описание работы.
8
Сервопривод является
«автоматическим точным исполнителем»
получая на вход значение управляющего
параметра (в режиме реального времени), он
«своими силами» (основываясь на показаниях
датчика) стремится создать и поддерживать
это значение на выходе
исполнительного элемента.
9.
Описание сервоприводов БПЛА.Блок-схема, описание работы.
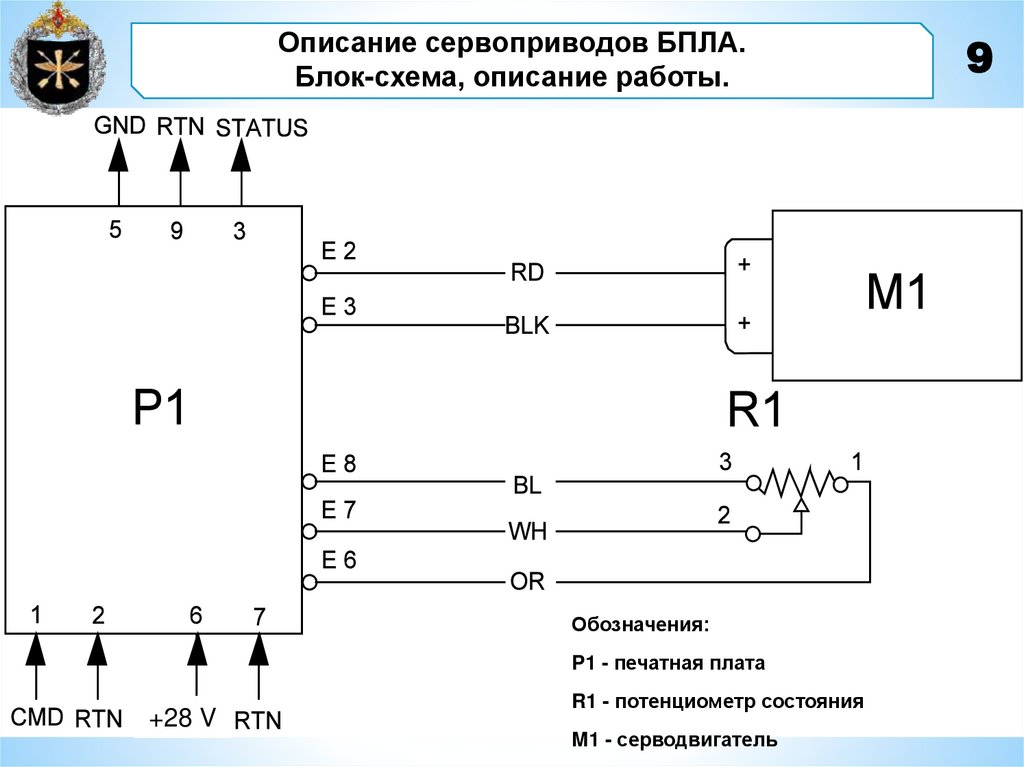
Обозначения:
P1 - печатная плата
+28 V
R1 - потенциометр состояния
M1 - серводвигатель
9
10. Назначение контактов разъема сервопривода
1Signal command (сигнал команды) ±5,00 В пост. тока
2
Signal return (обратная цепь сигнала) Аналоговая цепь
3
Status servo (состояние сервопривода)
±2,5 В пост.тока
4
5
Chassis GND ("земля" корпуса)
6
+28 В пост. тока
7
Power GND ("земля" питания) Power RTN (обратная цепь)
Power in (Подача питания)
8
9
Status return (обратная цепь состояния) Аналоговая обратная
11.
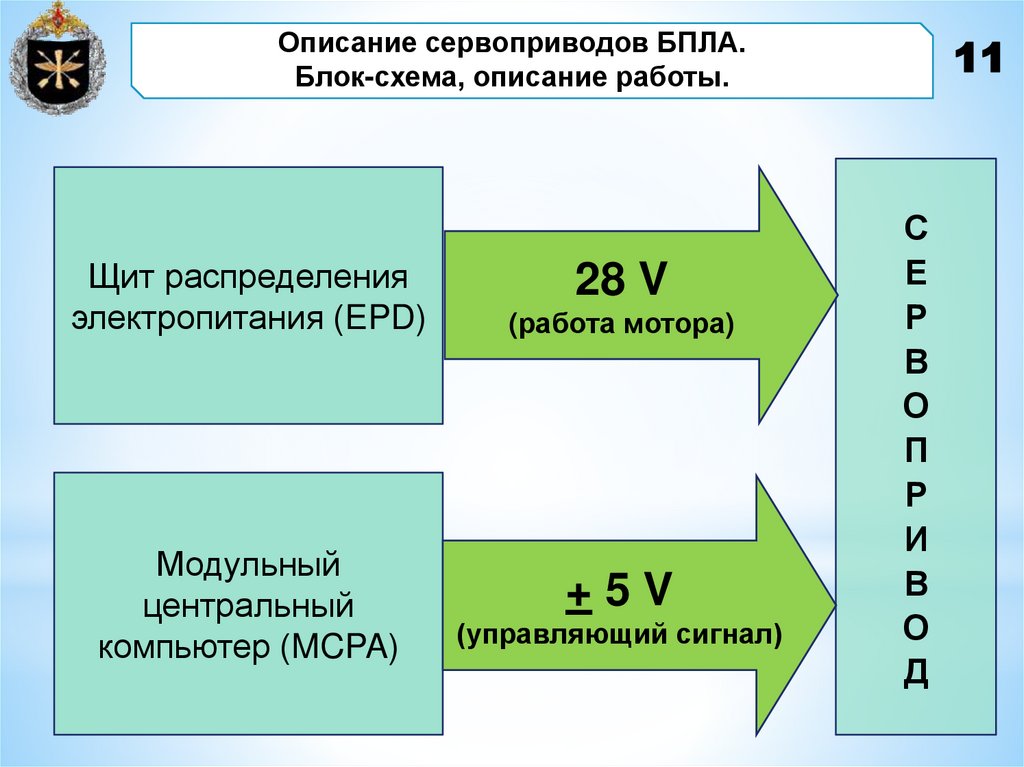
Описание сервоприводов БПЛА.Блок-схема, описание работы.
Щит распределения
электропитания (EPD)
Модульный
центральный
компьютер (MCPA)
28 V
(работа мотора)
+5V
(управляющий сигнал)
11
С
Е
Р
В
О
П
Р
И
В
О
Д
12.
Описание сервоприводов БПЛА.Блок-схема, описание работы.
12
Сервопривод принимает сигнал от
вычислителя, он проходит через
систему управления
(сравнивает команду с состоянием)
и приводит в действие сервопривод,
который приводит в движение
поверхность управления полетом.
13.
Описание сервоприводов БПЛА.Блок-схема, описание работы.
13
Управляющий сигнал проходя через систему
управления, сравнивает команду с
состоянием привода и определяет
необходимость применения дублирования в
случае отказа какого-либо привода.
14.
Описание сервоприводов БПЛА.Блок-схема, описание работы.
14
Система управления ЛА управляется
10 сервоприводами:
2 привода рулей направления,
2 привода элеронов,
1 привод дроссельной заслонки,
1 привод передней опоры шасси,
2 привода закрылков,
2 привода рулей высоты.
15.
Описание сервоприводов БПЛА.Блок-схема, описание работы.
Все сервоприводы
взаимозаменяемые.
При замене сервоприводов
обязательна их регулировка согласно
технологической документации.
15
16.
Описание сервоприводов БПЛА.Блок-схема, описание работы.
16
Сервоприводы рулей направления находятся на каждом из вертикальных
стабилизаторов.
Сервоприводы управляют рулями
направления по входным сигналам от
схемы управления рысканием.
17.
Описание сервоприводов БПЛА.Блок-схема, описание работы.
Рабочий диапазон
рулей
направления
составляет ±30°
17
18.
Описание сервоприводов БПЛА.Блок-схема, описание работы.
18
Сервоприводы рулей высоты находятся внутри горизонтальных
стабилизаторов.
Сервоприводы управляют рулями
высоты по входным сигналам от схемы
управления тангажа.
19.
Описание сервоприводов БПЛА.Блок-схема, описание работы.
19
Рабочий диапазон руля высоты составляет
от +24 до -16°
20.
Описание сервоприводов БПЛА.Блок-схема, описание работы.
20
Сервоприводы элерона находятся возле законцовок правой и
левой консолей крыла.
Эти приводы управляют креном БПЛА.
21.
Описание сервоприводов БПЛА.Блок-схема, описание работы.
21
Сервоприводы элеронов управляются
одной той же командой и движутся в
противоположных направлениях
22.
Описание сервоприводов БПЛА.Блок-схема, описание работы.
22
Рабочий диапазон элеронов составляет ±20°.
23.
Описание сервоприводов БПЛА.Блок-схема, описание работы.
23
Сервопривод дроссельной заслонки
располагается на креплении двигателя.
Сервопривод дроссельной заслонки
управляет подачей воздуха к
входному коллектору.
24.
Описание сервоприводов БПЛА.Блок-схема, описание работы.
24
Тяги дроссельной заслонки открывают
или закрывают дроссельную заслонку по
сигналам автопилота тем самым
увеличивают или уменьшают подачу
воздуха.
В результате изменяется число оборотов
двигателя.
25.
Описание сервоприводов БПЛА.Блок-схема, описание работы.
Диапазон хода сервопривода
дроссельной заслонки
составляет ±40°.
Сервопривод функционирует от
напряжения от-5 В постоянного тока
(для режима оборотов малого газа)
до +5 В постоянного тока
(максимальное число оборотов).
25
26.
Описание сервоприводов БПЛА.Блок-схема, описание работы.
26
Трос привода
Сервопривод
27.
Описание сервоприводов БПЛА.Блок-схема, описание работы.
Сервопривод передней
опоры шасси –
располагается в носовой части
фюзеляжа БПЛА.
Диапазон хода сервопривода
передней опоры шасси ± 6,5°.
27
28.
Описание сервоприводов БПЛА.Блок-схема, описание работы.
28
Вычислитель FCC направляет
напряжение ±5 В постоянного тока для
приведения в действие сервоприводов
передней опоры шасси одновременно
с управлением сервоприводом руля
направления.
29.
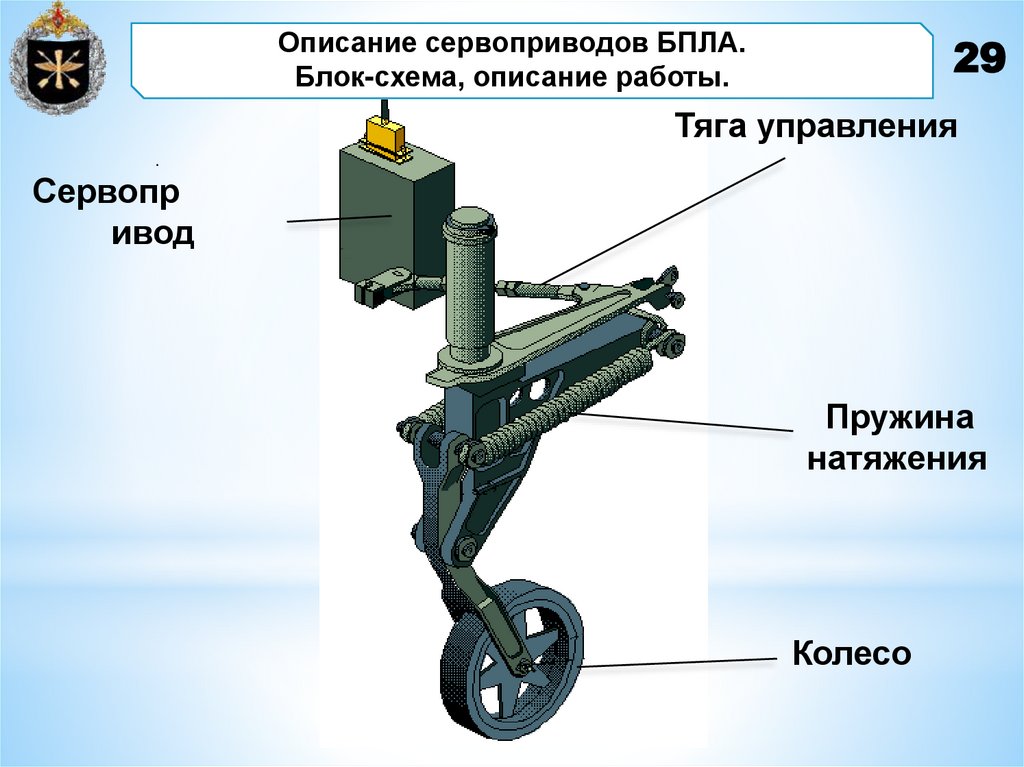
Описание сервоприводов БПЛА.Блок-схема, описание работы.
29
Тяга управления
.
Сервопр
ивод
Пружина
натяжения
Колесо
30.
Описание сервоприводов БПЛА.Блок-схема, описание работы.
30
Сервоприводы закрылок расположены в закрытых отсеках и
управляют функционированием
управляющих закрылок по сигналам от
схемы управления закрылками.
31.
Описание сервоприводов БПЛА.Блок-схема, описание работы.
Рабочий диапазон закрылок
составляет от 0 до - 37°.
31
32.
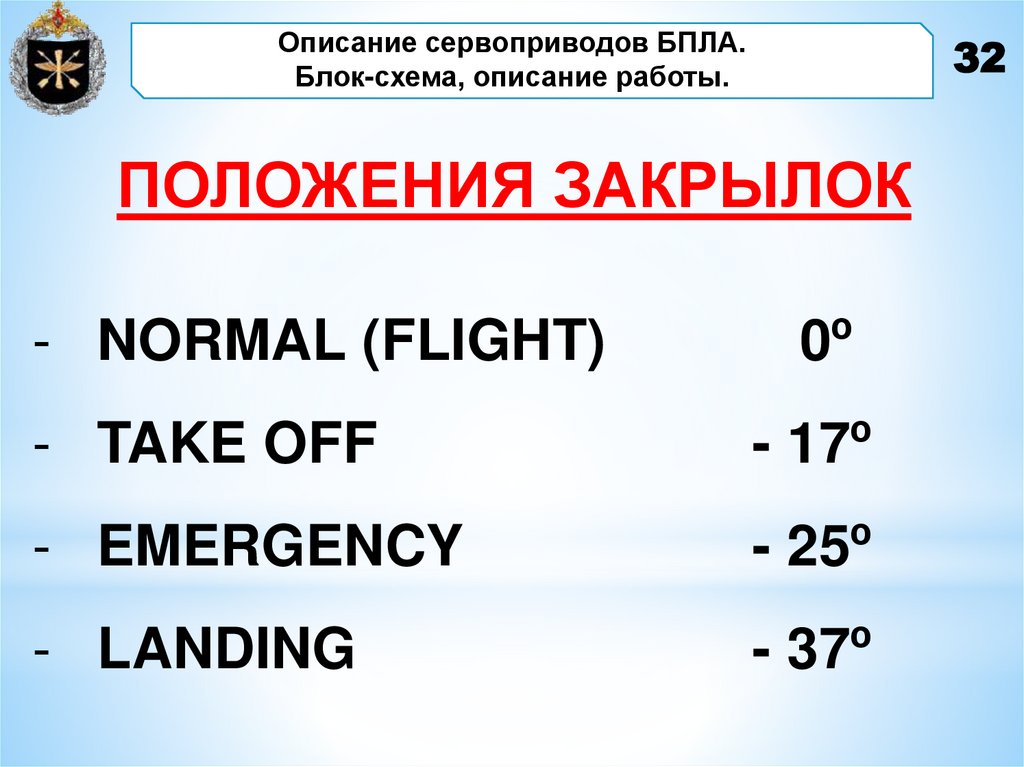
Описание сервоприводов БПЛА.Блок-схема, описание работы.
32
ПОЛОЖЕНИЯ ЗАКРЫЛОК
- NORMAL (FLIGHT)
0º
- TAKE OFF
- 17º
- EMERGENCY
- 25º
- LANDING
- 37º
33.
Вопрос 2.Резервное дублирование
сервоприводов.
34. Резервное дублирование сервоприводов.
Отказ приводаРезерв
Руль высоты
Асимметричная стабилизация элеронов.
Тангажом управляет работающий руль
высоты
Дроссель
Нет
Элерон
Стабилизация крена путем расположения
второго элерона в положении
отказавшего. Управление креном при
помощи закрылков
Руль направления
Стабилизация путем расположения
второго руля направления в положение,
противоположное положению
нерабочего. Управление рысканием
посредством функционирующего руля
направления
35. Резервное дублирование сервоприводов.
Отказ приводаРезерв
Закрылки
Стабилизация путем расположения
второго закрылка в положение
нерабочего.
Передняя опора
шасси
Нет
36.
Вопрос 3.Режимы полета БПЛА.
37.
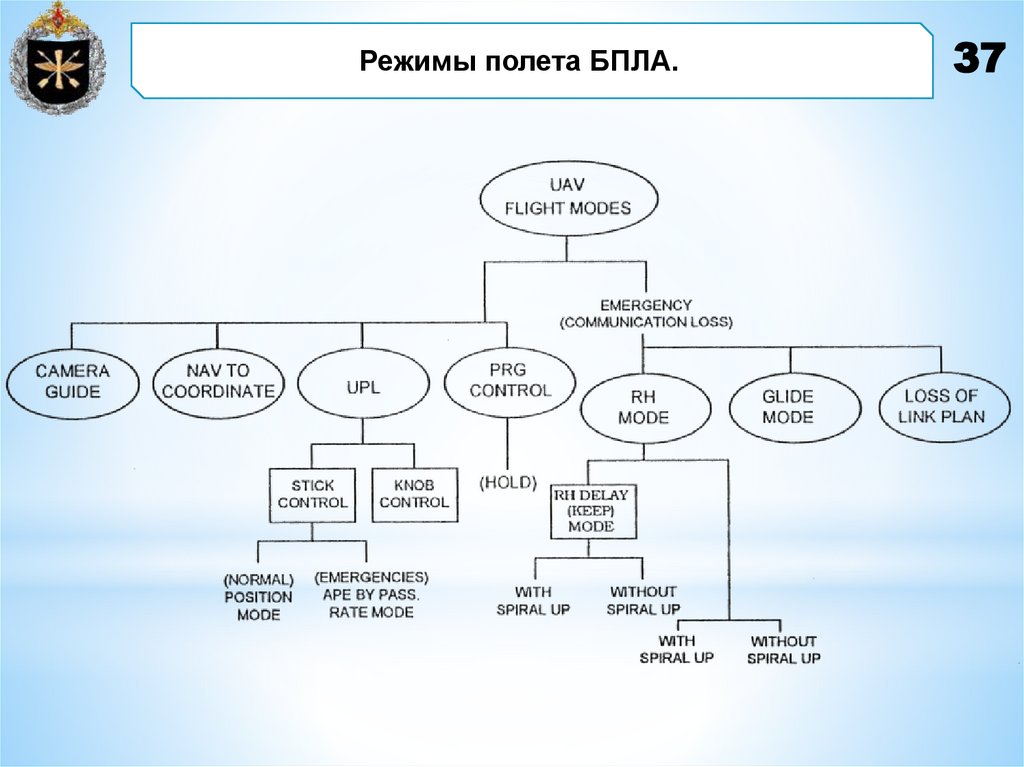
Режимы полета БПЛА.37
38.
Режимы полета БПЛА.38
Навигация БПЛА осуществляется
в соответствии с данными полета
(угловое положение БПЛА, скорость,
высота, температура и т.д.) и
параметрами задания, а также
данными, полученными от
НСУ (команды оператора) и
GPS (положение).
39. Нормальные полетные режимы
39Кнопочный режим (Knobs);
Режим полета к заданным координатам
(NavTo) ;
Режим полета по наведению камеры
(Camera Guide);
Режим удерживания позиции (HOLD);
Программные режимы работы.
40. Нормальные полетные режимы
Кнопочный режим Knobsуправления используется для
задания высоты полета БПЛА,
воздушной скорости IAS и
курса/крена с использованием
кнопок (указателей) на дисплее и
мыши.
40
41. Экран управления пилота
41Flaps NAV STR
LDG OFF ON
OAT QFE
40 c QNH
Active
ROLL
0
IAS
30
150
ALT x1000
30
60 ROC
2000
60
60
20
10
Pitch
30
25
+
10
deg
0
-
-10
-20
100
20
-60
2000
2400
ft / min
ROT
15
0
15
15
14 /sec
10
0
50
C 01v i g15
5
0
270
90
355
0
30
0
180
95 kn
11705 ft
60
90
Passive
IAS
Passive
HDG
Nav To
MIX
PBX
CBX
Active
ALT
Sensors NONE
Back up VGU
42. Нормальные полетные режимы
Режим полета к заданнымкоординатам - NavTo
используется для полета БПЛА к
заранее заданной оператором
координате на карте.
42
43. Нормальные полетные режимы
43Режим полета по наведению
камеры - Camera Guide
используется, когда курс БПЛА
определяется углом азимута
полезной нагрузки. В этом режиме
оператор полезной нагрузки может
удерживать цель в секторе обзора
(производит облет цели с заданным
радиусом).
44. Нормальные полетные режимы
44Режим удерживания позиции
(HOLD)
является кнопочным режимом.
БПЛА двигается по кругу в пределах
заданного радиуса вокруг последней
рассчитанной координаты.
45. Нормальные полетные режимы
45Программные режимы полета
К данным режимам относятся
полет по программе миссии,
полет по маршрутам прилета и
отлета и режимы взлета и
посадки.
46. Аварийные полетные режимы
46Режимы Stiks и MIX:
- Режим управления STIKS –
управление осуществляется с
пульта пилота PBX
- Режим управления MIX –
смешанный режим полета Knobs
и Stiks.
47. Блок РВХ
4748. Аварийные полетные режимы
-Возвращения домой (RH)
Планирование Glide
Удержание данных Keep Data
Аварийной посадки Emergency
Landing
48
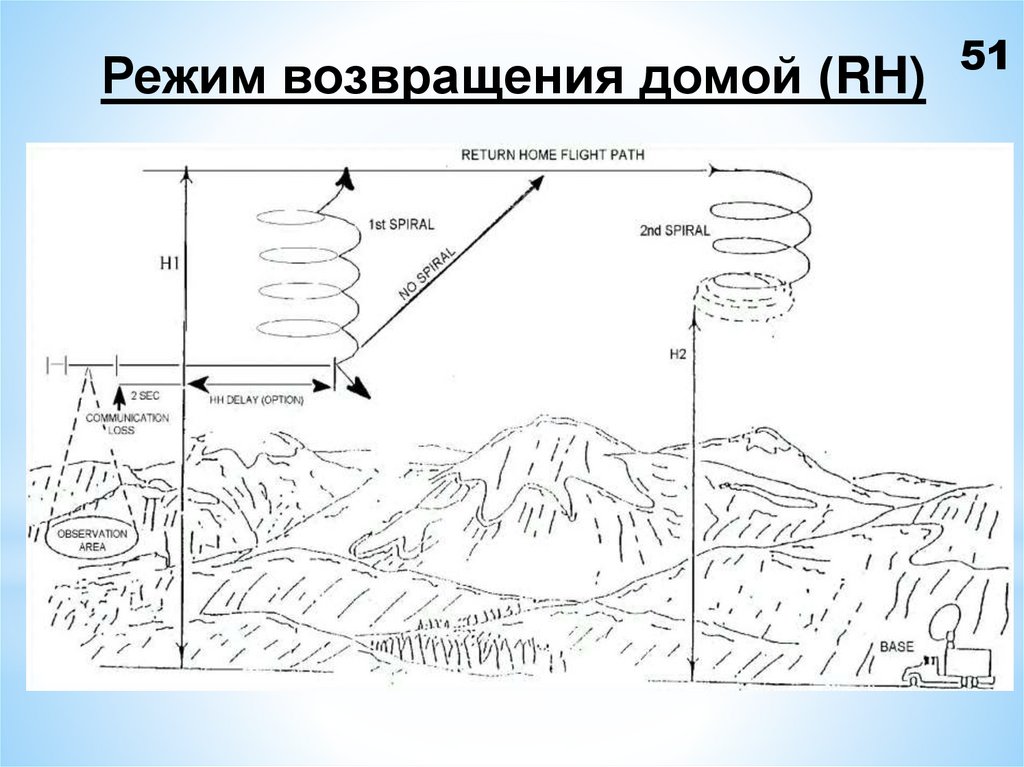
49. Аварийные полетные режимы
49Режим возвращения домой (RH)
используется для автоматического
возвращения БПЛА в заданное
расположение («домой») в случае
неисправности или нарушении линии связи.
Включается через 15 сек.
после пропадания связи с БПЛА
(может быть изменен от 2 сек. до 2 часов).
50. Аварийные полетные режимы
После восстановления связи сБПЛА, оператор нажимает
соответствующую кнопку для
отмены команды
«возврата домой» и БПЛА
возвращается на выполнение
задания.
50
51.
Режим возвращения домой (RH)51
52. Аварийные полетные режимы
52Режим аварийной посадки
Emergency Landing
обеспечивает прямой возврат БПЛА на
ВПП для посадки. Данный режим может
применяться при возникновении неисправностей,
наличие которых требует немедленного
возвращения на базу.
Режим состоит из двух основных фаз:
- навигации
- посадки
53. Аварийные полетные режимы
53Режим планирования - Glide
автоматически приводится в действие
бортовым компьютером на этапах
взлета и посадки при потере канала
связи на 2 сек. и установке пилотом
переключателя PBX «ТО/LAND» в
положение LAND.
54. Аварийные полетные режимы
54При этом
- малый газ,
- тангаж – 00,
- крен - 00,
- руль направления - 00,
- закрылки – в последнем положении.
Посадка осуществляется на
заранее выбранную площадку.
55. Аварийные полетные режимы
55Удержание данных Keep Data
Поддерживает переход между режимами полета в
случае потери связи с БПЛА. БПЛА выполняет
последние принятые команды до включения
следующего режима полета (по алгоритму MCPA)
— например, Abort, Glide (2 секунды) и
возвращение домой (после cоответствующей
задержки).
56.
56Режимы автопилота.
57. Режимы автопилота.
571. A/P KNOBS - кнопочный режим
управления БПЛА
2. A/P RATE – режим скорость.
Команды на БПЛА идут сразу с блока
РВХ, значения команд не ограничены
автопилотом.
3. A/P POSITION – задаваемый угол
крена и тангажа, с ограничениями
от автопилота .
58. КОНТРОЛЬНЫЕ ВОПРОСЫ:
1. Перечислите сервоприводы БПЛА.Описать предназначение.
2. Описать резерв работы сервоприводов
при отказе руля высоты.
3. Описать резерв работы сервоприводов
при отказе руля направления.
4. Перечислить нормальные режимы
полета.