








 mechanics
mechanicsSimilar presentations:










Автоматизированное управление рулями (тема 2.1)
1.
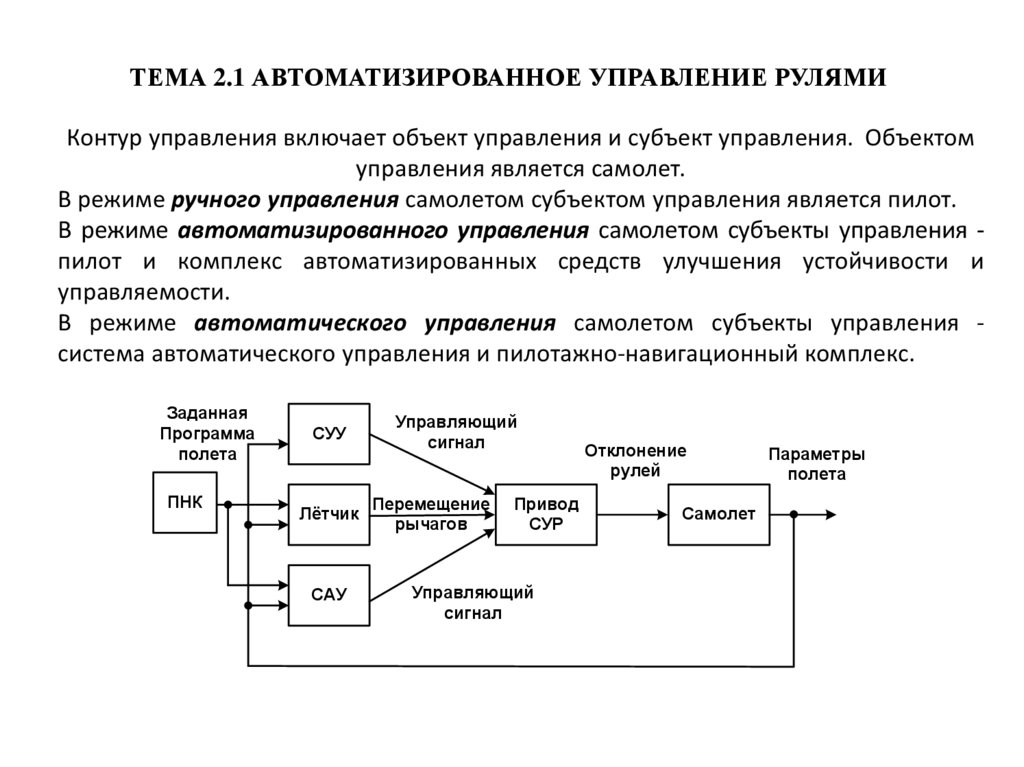
ТЕМА 2.1 АВТОМАТИЗИРОВАННОЕ УПРАВЛЕНИЕ РУЛЯМИКонтур управления включает объект управления и субъект управления. Объектом
управления является самолет.
В режиме ручного управления самолетом субъектом управления является пилот.
В режиме автоматизированного управления самолетом субъекты управления пилот и комплекс автоматизированных средств улучшения устойчивости и
управляемости.
В режиме автоматического управления самолетом субъекты управления система автоматического управления и пилотажно-навигационный комплекс.
Заданная
Программа
полета
ПНК
CУУ
Лётчик
CАУ
Управляющий
сигнал
Перемещение
рычагов
Привод
СУР
Управляющий
сигнал
Отклонение
рулей
Самолет
Параметры
полета
2.
2.1 Состав систем управления ВС. Виды систем управления рулями (СУP).Система управления полетом (СУП) включают:
-Система управления рулями самолета (СУР)
-Система управления стабилизатором самолета
-Система управления механизацией крыла самолета
-Система триммирования усилий
-Система управления двигателями
самолета
Виды систем управления рулями (СУР).
- прямые обратимые системы,
- бустерные системы и
- электродистанционные системы.
3.
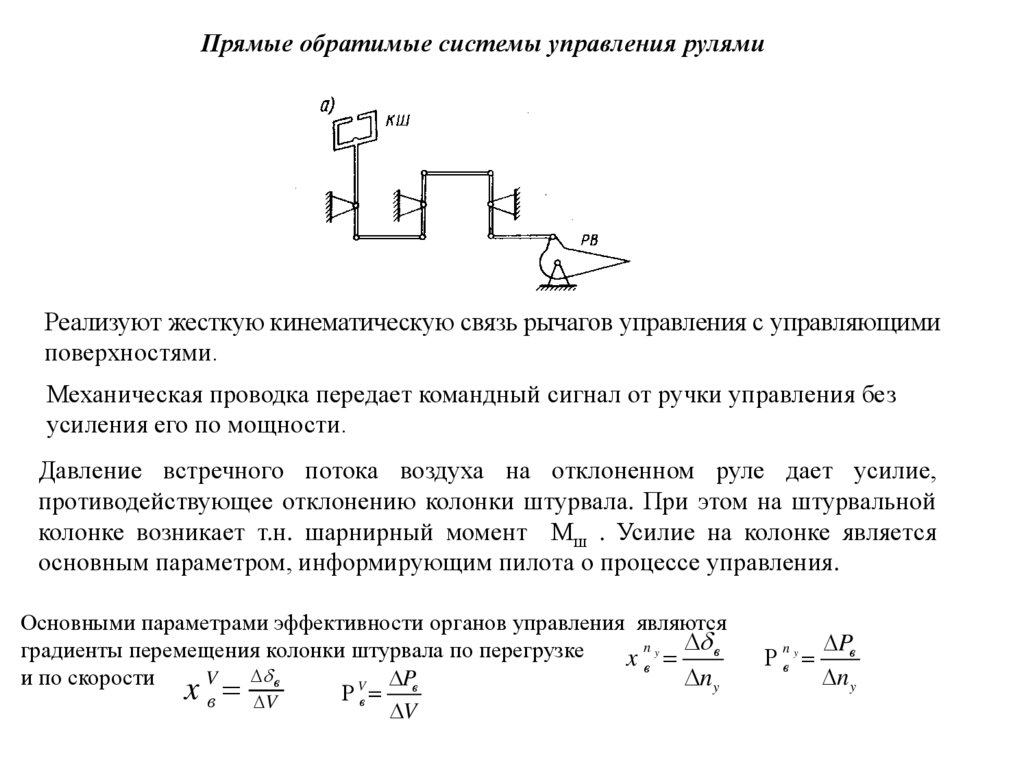
Прямые обратимые системы управления рулямиРеализуют жесткую кинематическую связь рычагов управления с управляющими
поверхностями.
Механическая проводка передает командный сигнал от ручки управления без
усиления его по мощности.
Давление встречного потока воздуха на отклоненном руле дает усилие,
противодействующее отклонению колонки штурвала. При этом на штурвальной
колонке возникает т.н. шарнирный момент Мш . Усилие на колонке является
основным параметром, информирующим пилота о процессе управления.
Основными параметрами эффективности органов управления являются
n
градиенты перемещения колонки штурвала по перегрузке
x в y в
и по скорости
n y
P
x Vв Vв
Vв в
V
в y
n
Pв
n y
4.
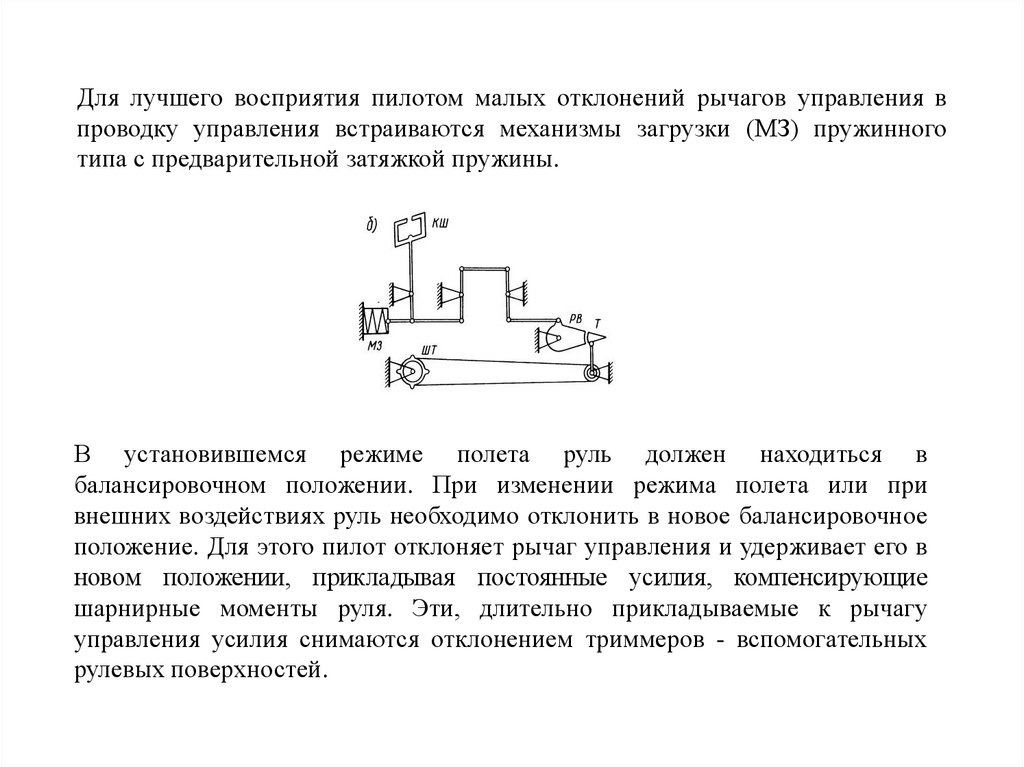
Для лучшего восприятия пилотом малых отклонений рычагов управления впроводку управления встраиваются механизмы загрузки (МЗ) пружинного
типа с предварительной затяжкой пружины.
В установившемся режиме полета руль должен находиться в
балансировочном положении. При изменении режима полета или при
внешних воздействиях руль необходимо отклонить в новое балансировочное
положение. Для этого пилот отклоняет рычаг управления и удерживает его в
новом положении, прикладывая постоянные усилия, компенсирующие
шарнирные моменты руля. Эти, длительно прикладываемые к рычагу
управления усилия снимаются отклонением триммеров - вспомогательных
рулевых поверхностей.
5.
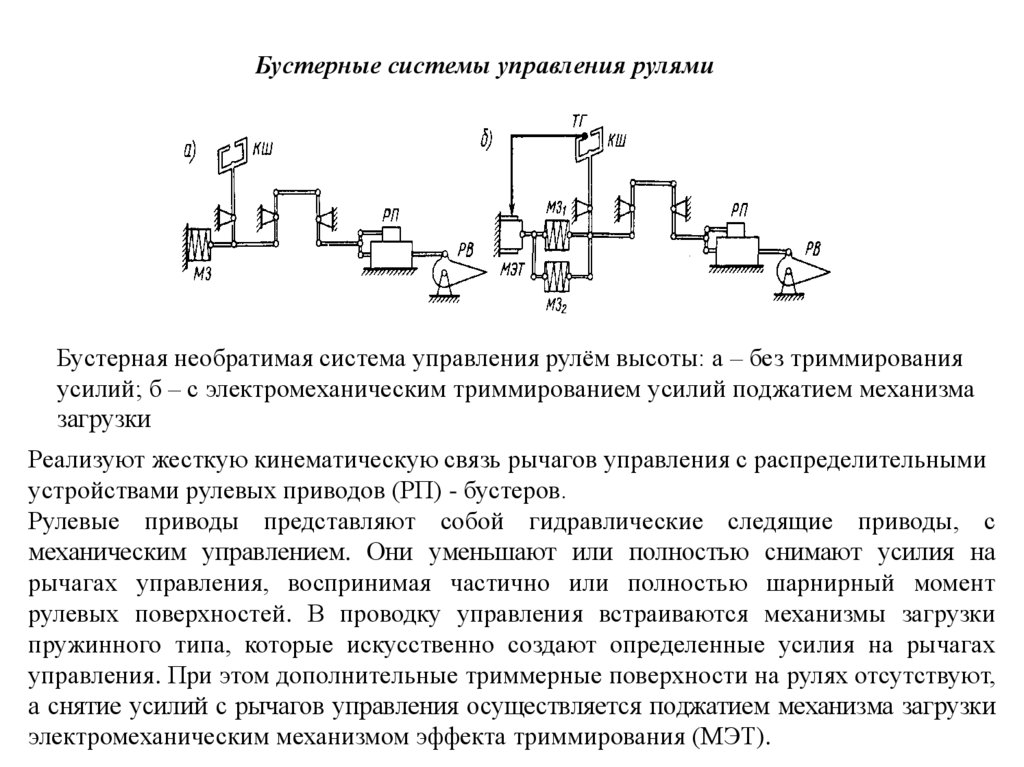
Бустерные системы управления рулямиБустерная необратимая система управления рулём высоты: а – без триммирования
усилий; б – с электромеханическим триммированием усилий поджатием механизма
загрузки
Реализуют жесткую кинематическую связь рычагов управления с распределительными
устройствами рулевых приводов (РП) - бустеров.
Рулевые приводы представляют собой гидравлические следящие приводы, с
механическим управлением. Они уменьшают или полностью снимают усилия на
рычагах управления, воспринимая частично или полностью шарнирный момент
рулевых поверхностей. В проводку управления встраиваются механизмы загрузки
пружинного типа, которые искусственно создают определенные усилия на рычагах
управления. При этом дополнительные триммерные поверхности на рулях отсутствуют,
а снятие усилий с рычагов управления осуществляется поджатием механизма загрузки
электромеханическим механизмом эффекта триммирования (МЭТ).
6.
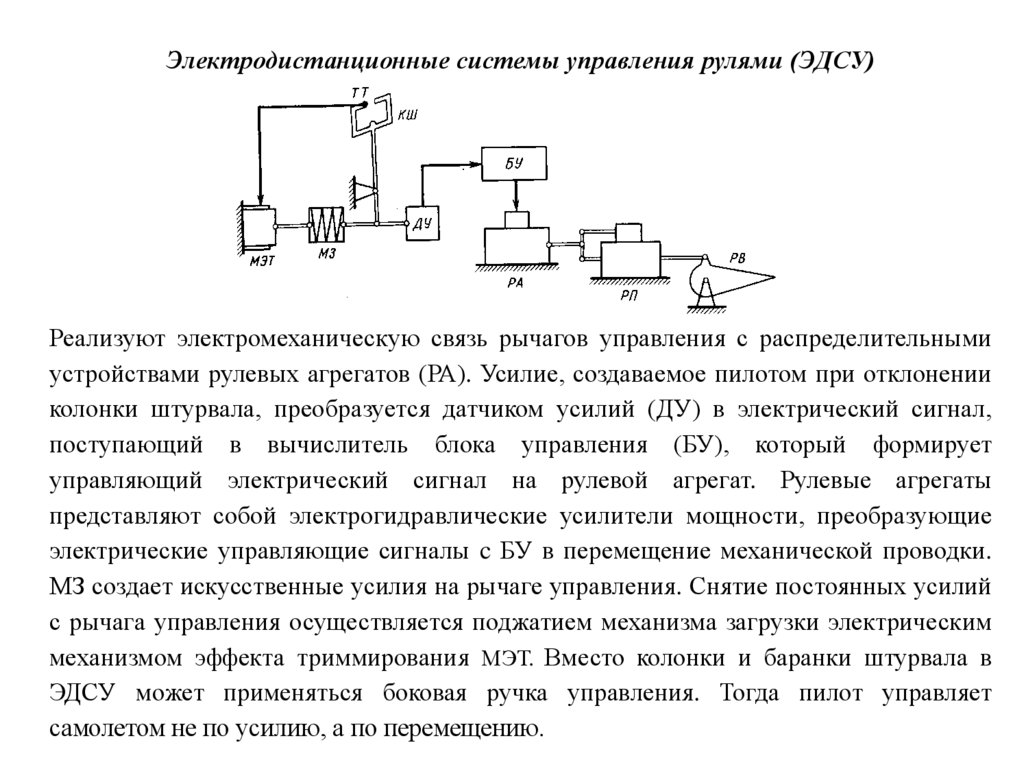
Электродистанционные системы управления рулями (ЭДСУ)Реализуют электромеханическую связь рычагов управления с распределительными
устройствами рулевых агрегатов (РА). Усилие, создаваемое пилотом при отклонении
колонки штурвала, преобразуется датчиком усилий (ДУ) в электрический сигнал,
поступающий в вычислитель блока управления (БУ), который формирует
управляющий электрический сигнал на рулевой агрегат. Рулевые агрегаты
представляют собой электрогидравлические усилители мощности, преобразующие
электрические управляющие сигналы c БУ в перемещение механической проводки.
МЗ создает искусственные усилия на рычаге управления. Снятие постоянных усилий
с рычага управления осуществляется поджатием механизма загрузки электрическим
механизмом эффекта триммирования МЭТ. Вместо колонки и баранки штурвала в
ЭДСУ может применяться боковая ручка управления. Тогда пилот управляет
самолетом не по усилию, а по перемещению.
7.
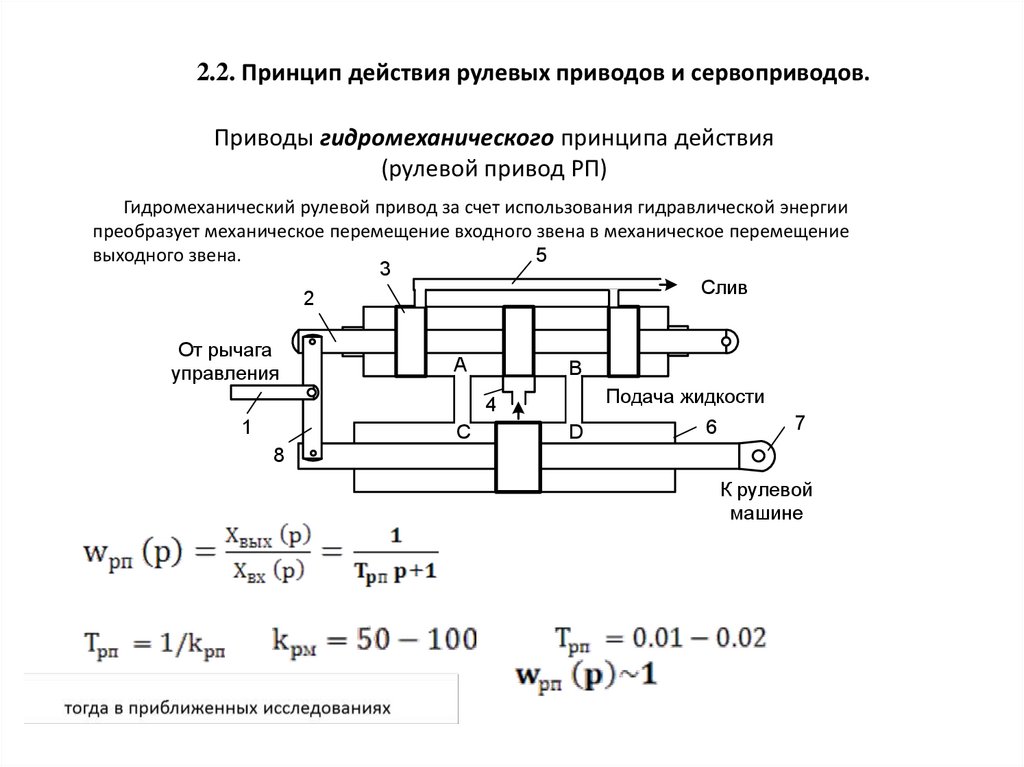
2.2. Принцип действия рулевых приводов и сервоприводов.Приводы гидромеханического принципа действия
(рулевой привод РП)
Гидромеханический рулевой привод за счет использования гидравлической энергии
преобразует механическое перемещение входного звена в механическое перемещение
выходного звена.
5
3
Слив
2
От рычага
управления
А
В
Подача жидкости
4
1
С
D
6
7
8
К рулевой
машине
8.
Принцип действия сервоприводов.Сервопривод – устройство, преобразующее электрический сигнал в
механическое перемещение входного звена рулевого привода. Применяются
электромеханические и электрогидравлические сервоприводы
Электромеханический сервопривод строится на базе рулевой машины.
Электромеханический сервопривод под действием электрической энергии
преобразует электрический входной управляющий сигнал автоматики в
перемещение выходного вала рулевой машины.
В зависимости от вида
обратной связи в
электромеханическом
сервоприводе различают
сервоприводы с позиционной
(жесткой) обратной связью,
скоростной (гибкой) обратной
связью и изодромной обратной
связью.
9.
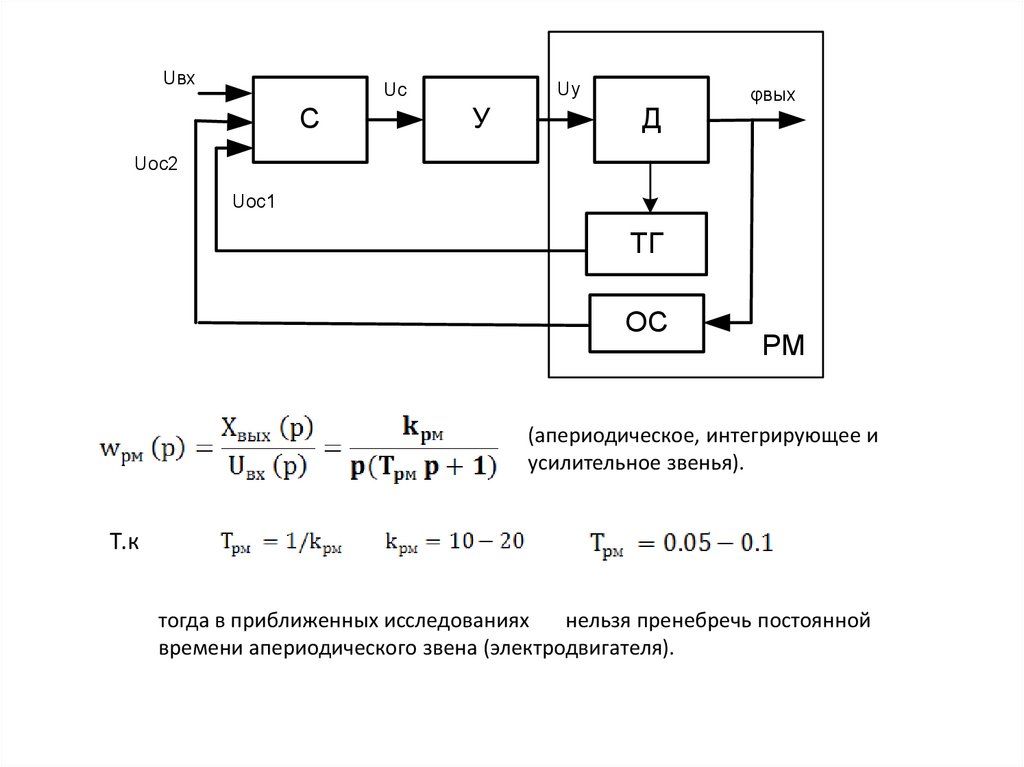
UвхUу
Uc
C
У
Д
φвых
Uос2
Uос1
ТГ
ОC
РМ
(апериодическое, интегрирующее и
усилительное звенья).
Т.к
тогда в приближенных исследованиях
нельзя пренебречь постоянной
времени апериодического звена (электродвигателя).
10.
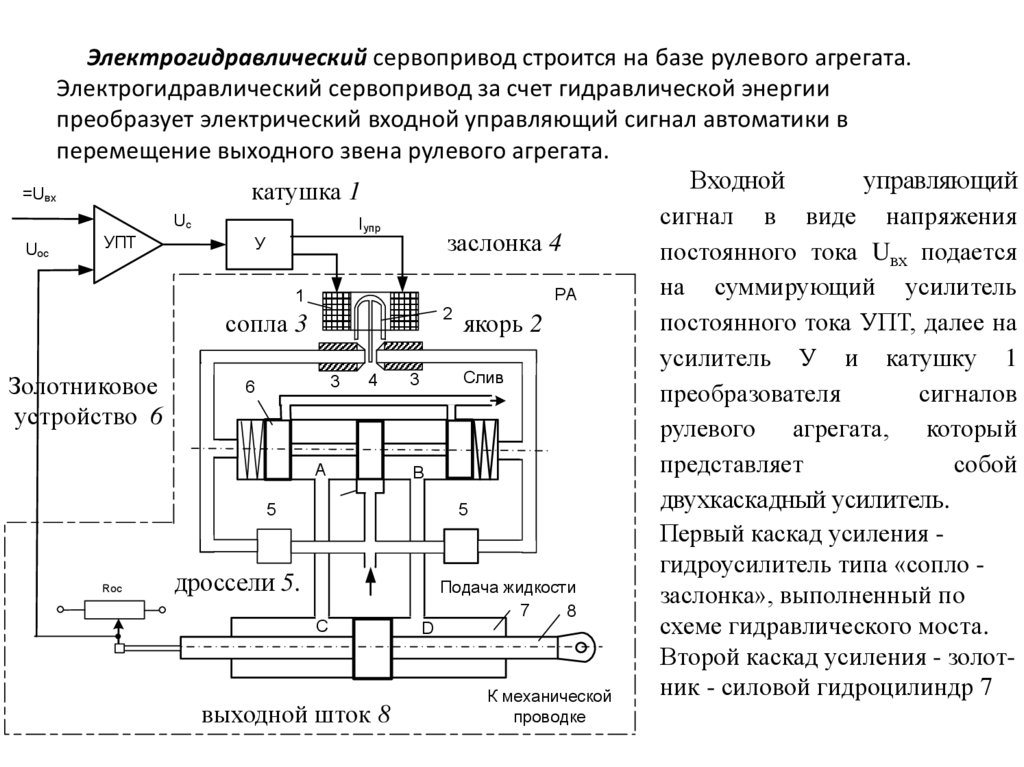
Электрогидравлический сервопривод строится на базе рулевого агрегата.Электрогидравлический сервопривод за счет гидравлической энергии
преобразует электрический входной управляющий сигнал автоматики в
перемещение выходного звена рулевого агрегата.
Входной
управляющий
=Uвх
катушка 1
сигнал в виде напряжения
Uc
Iупр
УПТ
У
заслонка 4
Uос
постоянного тока Uвх подается
на суммирующий усилитель
РА
1
2
постоянного тока УПТ, далее на
сопла 3
якорь 2
усилитель У и катушку 1
Слив
3
4
3
6
Золотниковое
преобразователя
сигналов
устройство 6
рулевого агрегата, который
представляет
собой
А
В
двухкаскадный усилитель.
5
5
Первый каскад усиления гидроусилитель типа «сопло дроссели
5.
Rос
Подача жидкости
заслонка», выполненный по
7
8
С
D
схеме гидравлического моста.
Второй каскад усиления - золотник - силовой гидроцилиндр 7
К механической
проводке
выходной шток 8
11.
UcUвх
C
У
ИМ
хвых
Uос
ДОC
РА
(апериодическое, интегрирующее и
усилительное звенья)
Т.к.
тогда в приближенных исследованиях
12.
СУР можно свести к следующимосновным типам обобщённых
структур:
• СУР с механической связью и
минимальной автоматизацией (рис.
2.8, а);
• СУР с механической связью и
автоматизацией, определяющей
необходимый уровень характеристик
устойчивости и управляемости (рис.
2.8, б);
• аналоговая ЭДСУ с резервной
механической связью (рис. 2.8, в);
• ЭДСУ без механической связи,
использующая аналоговую (рис. 2.8, г)
и цифровую технику (рис. 2.8, д).
13.
2.3.1. Кинематика включения в механическую проводку управления рулевыхприводов, агрегатов и машин.
Способы включения приводов в проводку управления рулями
•последовательный (одновременное управление автоматического и ручного)
•параллельный (управление или автоматического или ручного).
Последовательный способ включения реализуется двумя схемами:
• через раздвижную тягу
• через дифференциальную качалку.
Параллельный способ реализуется через тросовую передачу и качающийся
сектор.
14.
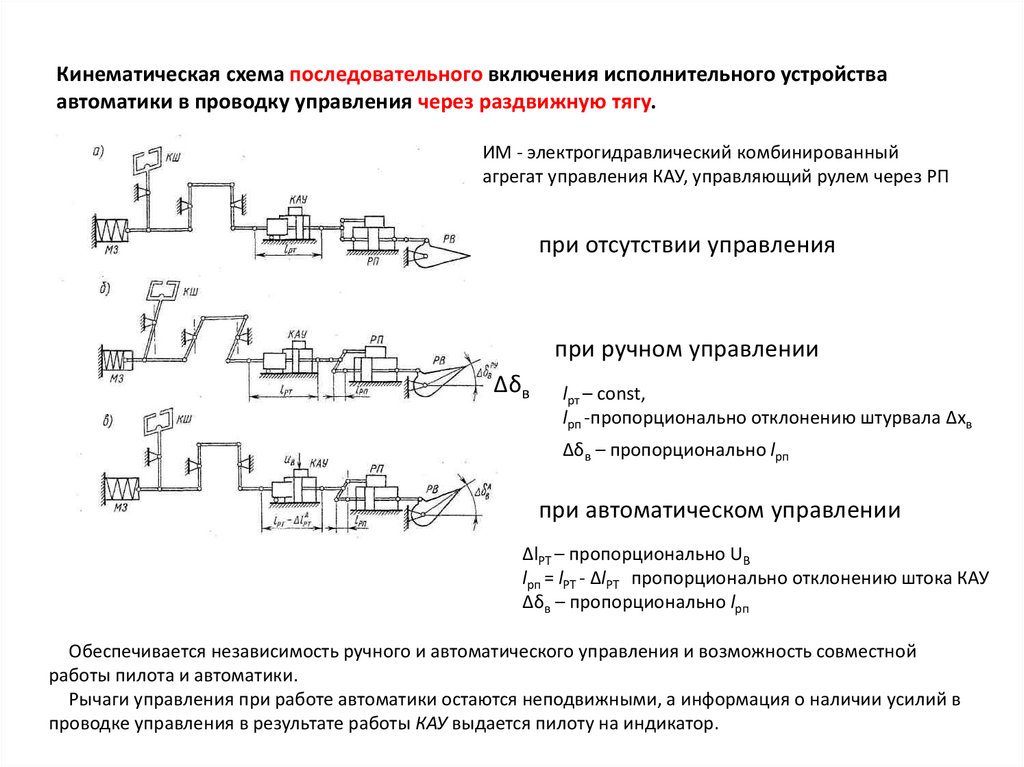
Кинематическая схема последовательного включения исполнительного устройстваавтоматики в проводку управления через раздвижную тягу.
ИМ - электрогидравлический комбинированный
агрегат управления КАУ, управляющий рулем через РП
при отсутствии управления
при ручном управлении
Δδв
lрт – соnst,
lрп -пропорционально отклонению штурвала Δхв
Δδв – пропорционально lрп
при автоматическом управлении
ΔlРТ – пропорционально UB
lрп = lРТ - ΔlРТ пропорционально отклонению штока КАУ
Δδв – пропорционально lрп
Обеспечивается независимость ручного и автоматического управления и возможность совместной
работы пилота и автоматики.
Рычаги управления при работе автоматики остаются неподвижными, а информация о наличии усилий в
проводке управления в результате работы КАУ выдается пилоту на индикатор.
15.
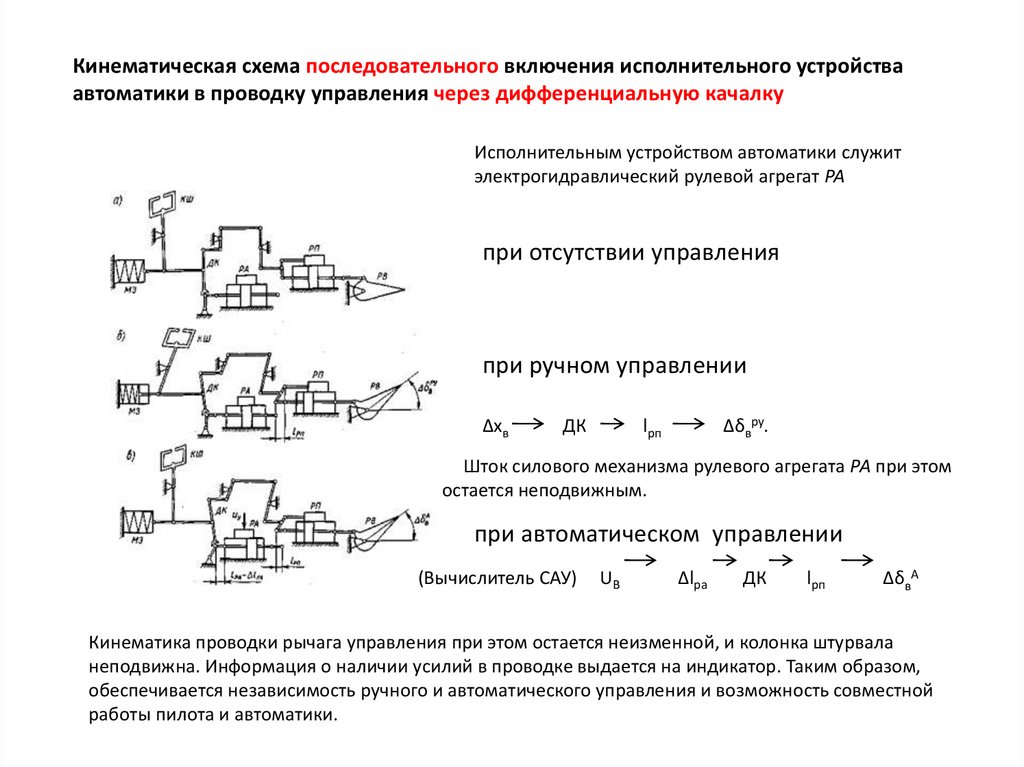
Кинематическая схема последовательного включения исполнительного устройстваавтоматики в проводку управления через дифференциальную качалку
Исполнительным устройством автоматики служит
электрогидравлический рулевой агрегат РА
при отсутствии управления
при ручном управлении
Δхв
ДК
Δδвру.
lрп
Шток силового механизма рулевого агрегата РА при этом
остается неподвижным.
при автоматическом управлении
(Вычислитель САУ)
UB
Δlра
ДК
lрп
ΔδвА
Кинематика проводки рычага управления при этом остается неизменной, и колонка штурвала
неподвижна. Информация о наличии усилий в проводке выдается на индикатор. Таким образом,
обеспечивается независимость ручного и автоматического управления и возможность совместной
работы пилота и автоматики.
16.
Кинематическая схема параллельного включения исполнительного устройства автоматики впроводку управления
Исполнительным устройством автоматики служит электромеханическая
рулевая машина РМ, сопряженная с проводкой через тросовую передачу и
качающийся сектор.
при отсутствии управления
при ручном или автоматическом управлении.
Δxв
Uв
lрп
Δφ РМ
Δδвру
17.
2.3.2. Кинематика сопряжения ручного и автоматического управления.Режимы ручного и автоматического управления чередуются и переход должен
происходить плавно , без рывков. Эта задача сопряжения ручного и
автоматического управления реализуется с помощью специальных электрических
схем согласования автоматики и с помощью дополнительных исполнительных
устройств, воздействующих на кинематику механической проводки.
Ручное и автоматическое управление сводится к созданию управлений на входе РП
медленных и быстрых составляющих. Медленные составляющие обеспечивают
балансировку ВС, быстрые-обеспечивают парирование возмущений и
целенаправленные управления
Переход с ручного режима управления на автоматический в установившемся полете
происходит, предварительно стриммировав усилия на рычагах управления таким
образом, чтобы балансировочному положению рулей соответствовало нейтральное
положение механизма загрузки, что обеспечивает отсутствие усилий на рычагах
управления. Поэтому при переходе от ручного к автоматическому управлению
необходимо установить нейтральное положение выходных штоков и валов
исполнительных устройств автоматики в момент их электрического подключения.
При переходе с автоматического управления на ручное необходимо, чтобы положение
рычагов управления полностью соответствовало отклонению рулей.
18.
(рис. 5.14, а)При последовательном включении распространена схема «перекачки» медленной
составляющей управляющего сигнала автоматики в тракт ручного управления.
Дополнительное исполнительное устройство автоматики - механизм эффекта
триммирования воздействует на механизм загрузки, отклоняя рычаг управления при
поступлении электрических сигналов.
В ручном режиме электрический сигнал формирует пилот путем нажатия тангенты
управления МЭТ на штурвале. В автоматическом режиме электрический сигнал
формируется автоматикой, которая выделяет медленную составляющую
управляющего сигнала для воздействия на руль через МЭТ.
19.
Обратный переход с ручного управления на автоматическое в данной схеме нетребует никакой предварительной подготовки, так как в ручном режиме выходной
шток РА остается неподвижным относительно нейтрального положения
(рис. 5.14, б)
При параллельном включении ручное и автоматическое воздействия передаются на
рули по одному и тому же тракту. Рассмотрим схему сопряжения с «плавающей»
обратной связью (рис. 5.14,б). Эта связь вводится по перемещению механизма
загрузки, измеряемого датчиком положения ДП, таким образом, чтобы нулевому
сигналу на входе рулевой машины соответствовало нейтральное состояние
пружины. Это обеспечивает безударное включение автоматического управления,
если к моменту включения пилот стриммировал в ручном режиме усилие на рычаге
управления. Если в процессе автоматического управления балансировочное
положение самолета меняется, то работает схема «перекачки», рассмотренная выше.
20.
Структура системы управления современного самолётаСистема НБУ (необратимого бустерного управления)
21.
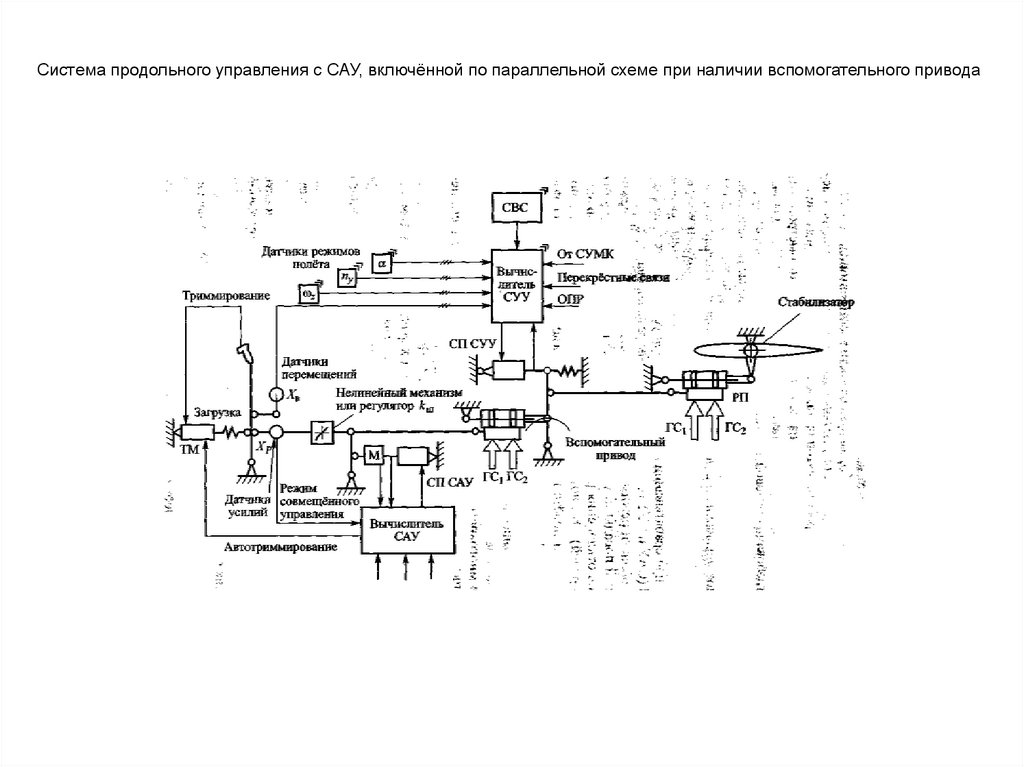
Система продольного управления с САУ, включённой по параллельной схеме при наличии вспомогательного привода22.
Схема продольного управления с САУ, включённой по последовательной схеме23.
Внедрение электродистанционной системы управленияв систему управления рулями
Переход к ЭДСУ был подготовлен предыдущими разработками в области
автоматизированных СУР. Развитие и внедрение СУУ повышенной эффективности
(Ту-144, Ту-154, Ан-124, Ил-96), а также ЭДСУ с резервным механическим
управлением (Т-4) создали надёжную базу, на основе которой ЭДСУ стала
основной СУР самолёта.
В первых структурах ЭДСУ использовали аналоговую элементную базу аналоговые ЭДСУ. Для обеспечения требований к надёжности управления и
безопасности полёта аналоговые ЭДСУ имели уровень резервирования не менее
четырехкратного, что сохраняло их работоспособность как минимум после двух
последовательных отказов.
24.
Увеличение сложности управляющей части современных самолётов, главнымобразом из-за роста числа поверхностей управления и их приводов, расширения
функций СУР, а также ужесточения требований к динамике систем, точности
отработки их сигналов и надёжности управления, обусловило необходимость
повышения её эффективности за счёт использования достижений в области
электронных СУР.
25.
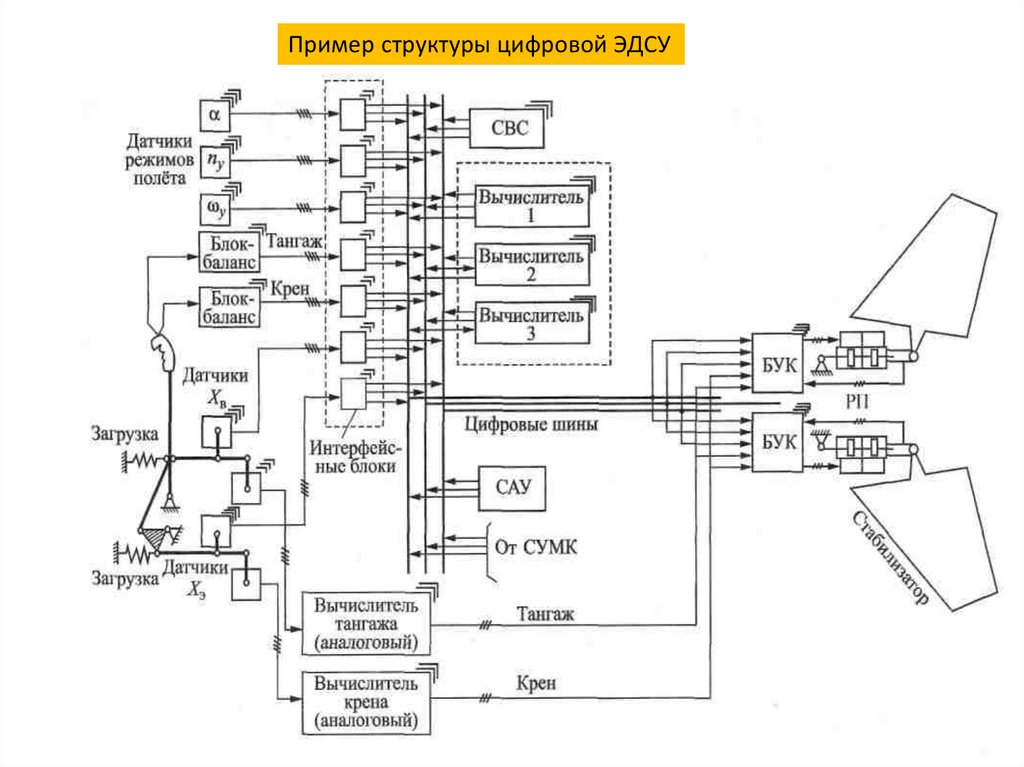
Пример структуры цифровой ЭДСУ26.
Применение ЦВМ в СУР самолёта более эффективно по сравнению саналоговой системой обеспечивает обработку данных и управление
вычислительным процессом в СУР, включая:
* сбор и хранение больших массивов информации от датчиков различных
систем самолёта и командных РУ;
* обработку большого объёма информации и представление её в
обобщённом виде на индикаторах в кабине;
* формирование командного сигнала высокой точности при управлении самолётом с учётом изменения его характеристик и режимов полёта,
включая наличие ограничений в аэродинамических характеристиках и
прочности самолёта;
* контроль состояния системы, осуществление перестройки структуры
системы при отказах;
* введение приоритета для систем, наиболее важных с точки зрения безопасности.
27.
Возможности цифровой техники в значительной мере зависят от степенисовершенства применяемой цифровой машины. В свою очередь, совершенство
цифровой машины определяет её микропроцессор, который может реализовать
свои возможности только при условии высокой надёжности вычислителей.
Поэтому они с точки зрения безопасности полёта вычислители имеют трёх- или
четырёхкратное резервирование, позволяющее сохранить работоспособность
системы после как минимум двух последовательных отказов цифровых каналов.
Современные цифровые СУР имеют как аппаратурное, так и программное
резервирование. Представляют интерес некоторые данные по цифровой СУР
пассажирского самолёта «Боинг-777», который имеет трёхкратное резервирование
цифровых шин данных и девятикратное - микропроцессора. Самолёт управляется
по трём независимым каналам: правому, центральному и левому, у каждого из
которых есть трёхкратно резервированный микропроцессор и свой язык
программирования. При переходе к цифровой форме сигнала можно осуществить
передачу множества сигналов функциональных систем по одной шине, состоящей
из двух скрученных экранированных проводов, но с определённой дискретной
частотой и последовательностью. Причём эта частота должна быть очень высокой
(50... 100 МГц) для обеспечения скорости передачи 12 Мbit/с. Для волоконнооптических связей скорость передачи сигнала может достигать 20 Мbit/с.
28.
Цифровая шина данных - один из важнейших элементов интеграции электронныхсистем самолёта. С её помощью могут быть объединены свыше сотни различных
источников сигналов (терминалов), расположенных в разных местах самолёта. В
общем случае используемое число терминалов зависит от пропускной способности
цифровой шины данных, быстродействия вычислителей, управляющих этим
процессом, и пропускной способности связей оборудования с терминалом.
В гражданской авиации аналогом МILSTD- 1553В (применяемой в военной
авиации на более 30 типах ЛА) является шина ARING-429, которая также состоит из
пары экранированных скрученных проводов и имеет быстродействие порядка 1
Мbit/с, обеспечивая передачу до 30 различных сигналов. Она установлена на
транспортных самолётах «Боинг-757» и «Боинг-767», А300, АЗ10, А320 и др.
В связи с тем, что в СУР необходимо применять достаточно большое число РП (до
35...40 шт.), возникает проблема распределения сигналов управления от шины к РП,
которую решают блоки управления и контроля (БУК). Один из вариантов структуры
содержит электронные блоки, каждый из которых обслуживает группу модулей
приводов самолёта.. В другом варианте структуры каждый модуль привода имеет
свой БУК. При этом возможно их объединение в единый блок, обслуживающий все
модули привода конкретного органа управления.
29.
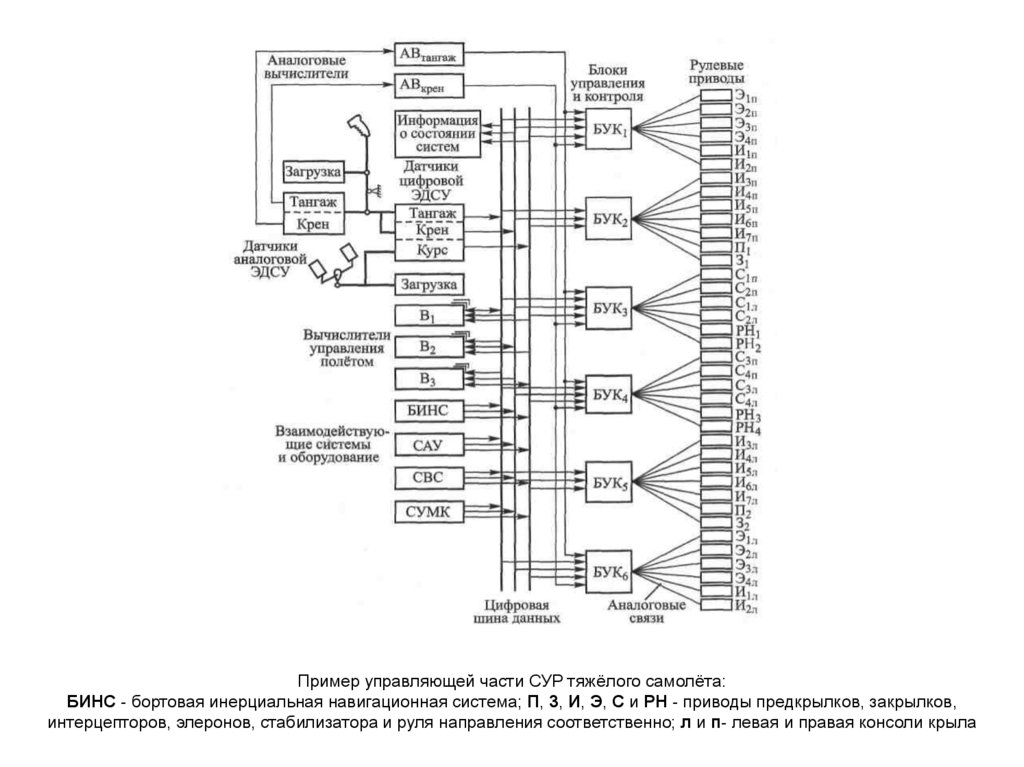
Пример управляющей части СУР тяжёлого самолёта:БИНС - бортовая инерциальная навигационная система; П, 3, И, Э, С и РН - приводы предкрылков, закрылков,
интерцепторов, элеронов, стабилизатора и руля направления соответственно; л и п- левая и правая консоли крыла