





")
")
.")
")
")


")

")
")
")












 mechanics
mechanics electronics
electronicsSimilar presentations:







")

 в движении судов. (Тема 5)")
Тема 2. Многоцелевая оптико-электронная стабилизированная система. Занятие 3. Режимы функционирования стабилизированной системы
1. Старший преподаватель: майор Кутузов Андрей Станиславович
Цикл: Подготовки специалистов на комплексы с беспилотнымилетательными аппаратами средней дальности и
большой продолжительности полета.
Дисциплина: Конструкция и эксплуатация комплекса с БПЛА
средней дальности «Форпост».
Тема 2.
Многоцелевая оптико-электронная
стабилизированная система.
Занятие 3.
Режимы функционирования и органы
управления многоцелевой оптико-электронной
стабилизированной системы.
Старший преподаватель: майор Кутузов Андрей Станиславович
2. Цели занятия
Описать режимы функционированияMOSP.
Перечислить подрежимы автоматического
режима сопровождения цели.
Перечислить органы управления MOSP.
Объяснить назначение и состав камеры
CCD.
3.
Вопрос 1. Режимы функционированиямногоцелевой оптико-электронной
стабилизированной системы.
Вопрос 2. Органы управления многоцелевой
оптико-электронной
стабилизированной системой.
Вопрос 3. Описание прибора с зарядовой
связью.
4.
Вопрос 1.Режимы функционирования
многоцелевой
оптико-электронной
стабилизированной системы
(MOSP).
5.
Режимы функционирования многоцелевойоптико-электронной стабилизированной системы
При включении питания или
соответствующей команды
поступившей в MOSP выполняется
запуск процедуры встроенного
контроля - BIT.
5
6.
Режимы функционирования многоцелевойоптико-электронной стабилизированной системы
6
По завершении BIT система
может функционировать в
нормальном режиме, а
результаты контроля передаются
в центральный процессор.
7.
Режимы функционирования многоцелевойоптико-электронной стабилизированной системы
Инициализация ПО и встроенный
контроль содержит режимы:
а) Режим калибровки - обеспечивает
калибровку системы. Для ИК-системы и
ТВ-системы выполняется калибровка
центрального перекрестья.
7
8.
Режимы функционирования многоцелевойоптико-электронной стабилизированной системы
8
Инициализация ПО и встроенный
контроль содержит режимы:
б) Внутренний контроль, выполняется в одном
из следующих автоматических режимов:
1) Полная проверка
2) Проверка ИК-системы переднего обзора (FLIR)
3) Проверка ТВ-системы.
9.
Режимы функционирования многоцелевойоптико-электронной стабилизированной системы
Полное функционирование системы
полезной нагрузки достигается при
включенном состоянии
системы:
- Управление линией визирования
(подвесами платформы)
- ON;
- ИК-система (FLIR) (питание)
- ON;
- ТВ-система (питание)
- ON.
9
10.
Режимы функционирования многоцелевойоптико-электронной стабилизированной системы
ПРИ ЭТОМ ВОЗМОЖНО :
Выбор режима управления линией
визирования.
Выбор видеосигнала: ИК-системы или
ТВ-системы;
10
11.
Режимы функционирования многоцелевойоптико-электронной стабилизированной системы
Platf – ON
TV – ON
FLIR – ON
MOSP – OFF
BIT
Калибровка
LOS
Внутренний контроль
(полный, ТВ или ИК)
РАБОЧИЕ РЕЖИМЫ
11
12.
Режимы функционирования многоцелевойоптико-электронной стабилизированной системы
12
Режимы управления линией
визирования
1-й режим. скорости (RATE) (ручное управление).
2-й режим. наведения по координатам (РТС).
3-й режим. захвата координаты (HOLD
COORDINATE).
4-й режим. «окно пилота» (PILOT WINDOW).
5-й режим. «программный» (Program).
6-й режим. автоматического сопровождения (Track)
13.
Режимы функционирования многоцелевойоптико-электронной стабилизированной системы
13
14.
142 режим
3 режим
5 режим
4 режим
1 режим
15. 1-й режим. Режим скорости (RATE)
15В режиме скорости RATE
управление линией визирования и
датчиками MOSP осуществляется
через систему каналов передачи
данных посредством команд с
джойстика.
16. 1-й режим. Режим скорости (RATE)
Предусмотрены следующиеподрежимы:
LOW - низкая скорость, макс. 3º/с
RATE - высокая скорость, макс. 30º/с
16
17. 2-й режим. Режим наведения по координатам (РТС).
Позволяет определить требуемую цель поее положению на карте либо по
заданным оператором координатам при
помощи меню.
Выполняется загрузка координат одной из
целей в БПЛА и осуществляется
автоматический поворот полезной нагрузки
на заданную координату и поддержание
заданной линии визирования LOS.
18. 3-й режим. Режим захвата координаты (HOLD COORDINATE)
После активации данного режима,НСУ измеряет координаты цели,
наблюдение которой ведется в
данный момент.
В полезную нагрузку выдается
команда поддержания линии
визирования по измеренным
координатам.
19. 4-й режим. Режим «окно пилота» (PILOT WINDOW)
Обеспечивает возможность выборапереднего обзора БПЛА. (Применяется
по запросу внутреннего пилота.)
При нажатии соответствующей кнопки
производится перемещение полезной
нагрузки на угол азимута 0 + 20 и угол
склонения 7 + 10.
20. 5-й режим. Режим программы MOSP
Режим выступает ведомымпо отношению
к программному режиму БПЛА.
При создании программы полета
БПЛА и вставке действий полезной
нагрузки используется программа
полезной нагрузки.
21. 5-й режим. Режим программы MOSP.
Altitude10000
ft
OK
Cancel
5-й режим. Режим программы
MOSP.
A
Payload Actions
После активации,
перемещение
MOSP
выполняется по
программам полета,
выполняемым
БПЛА.
E/O Payload
Off
On
Off
TV/IR Mode
TV
TV
IR
LOS Control
Bearing
Depression
Point to Coordinate
Zone 36
N
590000
4450000
1234
Film Camera
AVCR
SAR Leg
OK
m
On
Off
Off
Record
Standby
Standby
#
12
Cancel
P
22. Автоматическое сопровождение (Track)
АВТОМАТИЧЕСКИЙ РЕЖИМсопровождения цели
В автоматическом режиме сопровождения
цели линия визирования наводится на
контрастный объект на цели, а обработка
видеосигнала производится прибором
сопровождения – TVT-плата.
23.
Режимы функционирования многоцелевойоптико-электронной стабилизированной системы
23
Режим
АВТО
24. Автоматическое сопровождение (Track)
Метод сопровождения линии визирования(TRACK):
управление пределами окна сопровождения
выполняется автоматически.
Система сама выбирает
размер окна, оптимально
соответствующий задаче
сопровождения данной
цели.
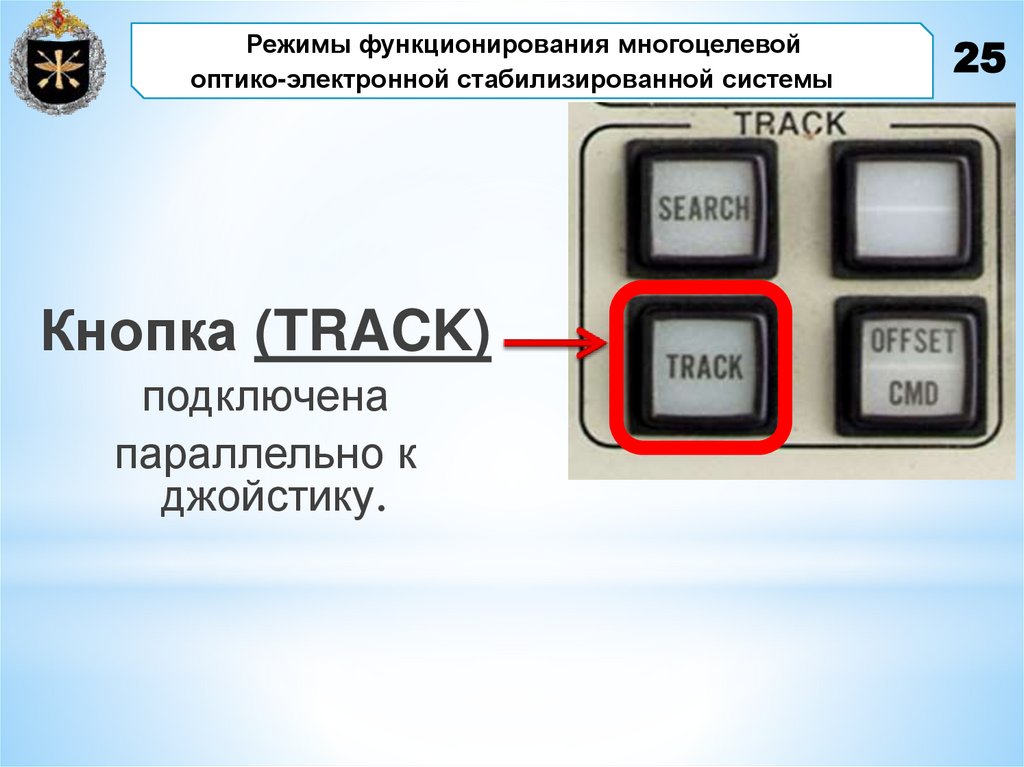
25.
Режимы функционирования многоцелевойоптико-электронной стабилизированной системы
Кнопка (TRACK)
подключена
параллельно к
джойстику.
25
26. Автоматическое сопровождение (Track)
ПОДРЕЖИМЫАВТОМАТИЧЕСКОГО РЕЖИМА
SEARCH (ПОИСК)
обеспечивается выбор новой цели в пределах
поля зрения при продолжении автоматического
сопровождения первой цели.
Оператор имеет возможность
переключения с сопровождаемой в данный
момент цели на новую.
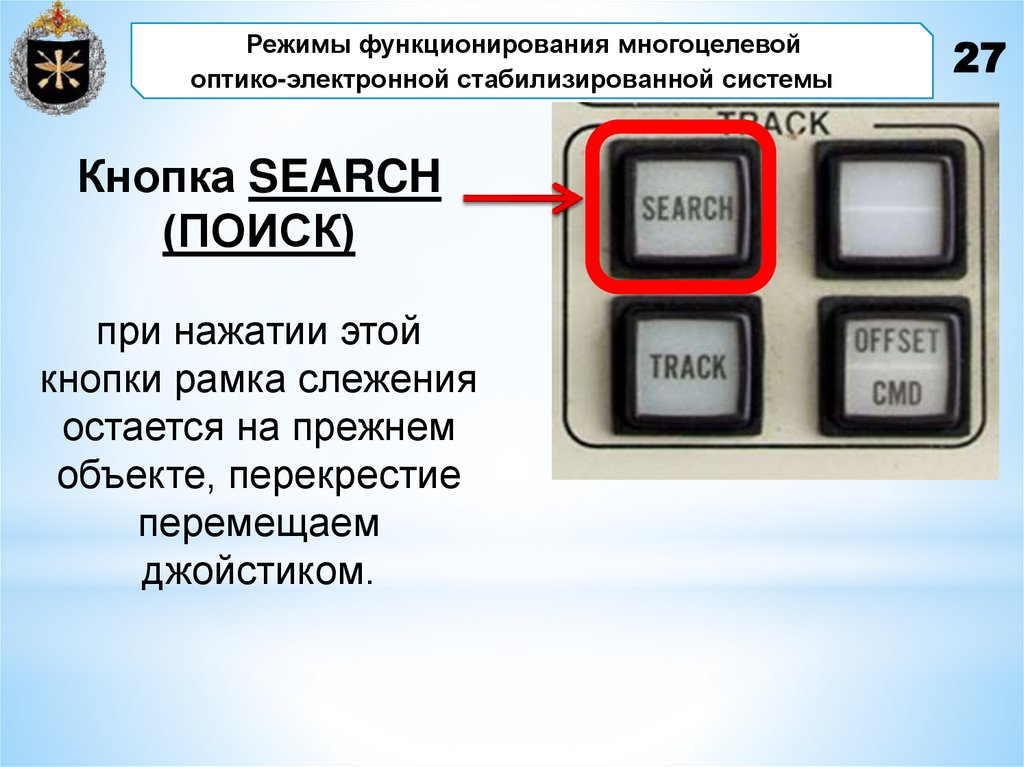
27.
Режимы функционирования многоцелевойоптико-электронной стабилизированной системы
Кнопка SEARCH
(ПОИСК)
при нажатии этой
кнопки рамка слежения
остается на прежнем
объекте, перекрестие
перемещаем
джойстиком.
27
28. Автоматическое сопровождение (Track)
ПОДРЕЖИМЫАВТОМАТИЧЕСКОГО РЕЖИМА
OFFSET (СМЕЩЕНИЕ)
обеспечивается автоматическое сопровождение
цели для поддержания ее в определенной точке
поля зрения с предварительно заданным и
управляемым смещением относительно
базовой точки (центра).
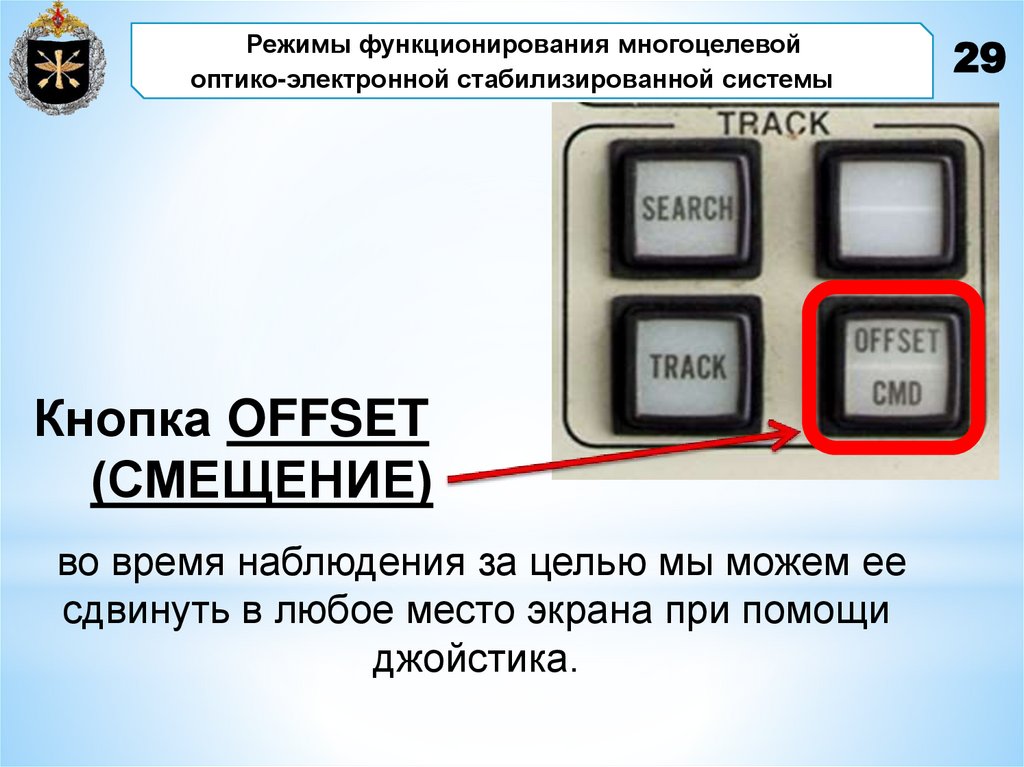
29.
Режимы функционирования многоцелевойоптико-электронной стабилизированной системы
Кнопка OFFSET
(СМЕЩЕНИЕ)
во время наблюдения за целью мы можем ее
сдвинуть в любое место экрана при помощи
джойстика.
29
30.
Режимы функционирования многоцелевойоптико-электронной стабилизированной системы
30
ПРИ ВЗЛЕТЕ И ПОСАДКЕ
в автоматическом режиме линия
визирования отводится назад и вверх
в целях защиты объективов камер от
предметов, поднимаемых с ВПП.
31.
Вопрос 2.Органы управления MOSP.
32.
Органы управления MOSP.Выбор
чувствительного
элемента
Высокая/низкая
скорость
Сопровождение
Поле зрения с
масштабированием
и фокусировка
32
Отметка
события
33.
Органы управления MOSP.33
34.
Органы управления MOSP.34
35.
Органы управления MOSP.35
Тумблер FOV
изменяет зум камеры (
)
При отклонении данного
тумблера влево будет
осуществляться переключение
TV камеры на ИК.
При отклонение вправо – будет
подключаться
2х кратная дополнительная
линза TV камеры.
36.
36Органы управления MOSP.
Тумблер FOCUS/NUC
производит коррекцию
неоднородностей (
)
и изменяется фокус
изображения в ручном
режиме (
)
37.
Органы управления MOSP.37
Кнопка
(AUTO/MANUAL)
позволяет выбрать
ручную или
автоматическую
настройки
диафрагмы.
38.
Органы управления MOSP.38
Тумблер IRIS
изменение диафрагмы.
Тумблер LEVEL
для изменения уровня
сигнала для ИК камеры
(изменение освещенности)
39.
Органы управления MOSP.39
Тумблер GAIN
изменение контрастности
картинки для ИК (резчеразмытие).
40.
Органы управления MOSP.40
Кнопка
BLAK/WHITE
для изменения
полярности изображения
для ИК камеры.
41.
Вопрос 3.CCD камера.
42.
CCD камера.42
Прибор с зарядовой связь (CCD)
представляет собой камеру с
широкоугольным сектором переднего
обзора, применяемую для получения
видеосигнала при полетах с высокой
степенью риска :
- облете БПЛА
- учебных полетах.
43.
CCD камера.43
ССD состоит:
- Противовес имитирует вес оптикоэлектронной системы полезной нагрузки.
- Плоский переходник обеспечивает
крепление стационарной камеры и
противовеса в отсеке полезной нагрузки.
- Блок прибора с зарядовой связью
камера ССD с широкоугольным сектором
переднего обзора.
44. Общий вид CCD камеры
44Противовес
Плоский
переходник
Блок прибора
с зарядовой
связью
45. КОНТРОЛЬНЫЕ ВОПРОСЫ:
1. Перечислите режимы функционированияMOSP.
2. Опишите подрежимы режима
автоматического сопровождения TRACK.
3. Назовите назначение органов
управления MOSP.
4. Расскажите назначение и состав камеры
CCD.
46. Задание на самоподготовку:
1. Руководство по описанию системыTM_(RU)SR-00-1, глава 6 стр.12-15.
2. Доп. Руководство по летной
эксплуатации ТМ_(RU)SR-05-2 глава 3
стр. 8, глава 5 стр. 22-32, стр. 38-47