")











 electronics
electronics industry
industrySimilar presentations:










Моделирование систем и процессов (МСиП)
1. Моделирование систем и процессов (МСиП)
Лекционный курсЧасть 1
2. Основные понятия и определения
Моделирование представляет собой одну из категорий теориипознания: на идее моделирования, по существу, базируется любой метод
научного исследования - как теоретический, так и экспериментальный.
Сущность построения модели заключается в том, что реальный
физический объект (прообраз) упрощается и заменяется некоторым другим
физическим или мысленным, абстрактным объектом (образом).
Под объектом моделирования понимается произвольный предмет
человеческой деятельности. Им может быть какое-либо устройство,
физическое явление или процесс.
Концептуальная
Модели делятся на:
Математическая
Физическая
3.
Концептуальная модель представляет собой содержательное описаниефункционирования объекта. На основе концептуальной модели производят
содержательную постановку задачи моделирования.
Физическая модель – это такая модель, в которой протекающие
идентичны природе процессов в исследуемом объекте. Изучение
технологических процессов на модельных установках и анализ влияния
физических параметров и линейных размеров аппарата на скорость
протекания процессов лежат в основе физического моделирования.
Математическая модель – это формализованное описание объекта в
виде формул, алгебраических и дифференциальных уравнений, неравенств и
т.д., описывающих процессы и явления, протекающие в объекте.
Модели могут разрабатываться для следующих целей:
1) исследование воспроизводимого объекта (для совершенствования или
построения теории процесса; для предсказания поведения объекта; для интерпретации
экспериментальных или теоретических результатов путем замены эксперимента на
объекте вычислительным экспериментом на модели с использованием ЭВМ);
2) достижение практических результатов (оптимальное проектирование
процессов и аппаратов (САПР); исследование и автоматизация действующих процессов
(АСУТП); разработка, проектирование и оптимизация систем управления (АСУТП);
обучение и демонстрация свойств объектов и СУ (АОС)).
4. Способы получения ММ
• АналитическийМетод пригоден для описания вновь проектируемых объектов, физикохимические процессы в которых достаточно хорошо изучены. К недостаткам
можно отнести сложность решения получающейся системы уравнений при
достаточно полном описании объекта и трудность определения параметров
моделей для исследуемого объекта.
• Экспериментальный
используется для исследования объектов в узком, "рабочем" диапазоне
изменения входных и выходных переменных. Основной недостаток –
невозможность установления функциональной связи между входящими в
уравнения числовыми параметрами и конструктивными характеристиками
объекта, режимными параметрами процесса, физико-химическими свойствами
веществ. Кроме того, полученные математические модели нельзя
распространять на другие однотипные объекты.
• Комбинированный
Сущность его заключается в аналитическом составлении уравнений
математического описания, проведении экспериментальных исследований с
целью определения коэффициентов (параметров) уравнений. Данный подход
объединяет многие положительные свойства экспериментального и
аналитического методов.
5. Основные этапы разработки системы управления технологическим объектом
1 этап. Качественный анализ ОУ. Постановказадачи
2 этап. Структурно-алгоритмический и
параметрический синтез СУ
3 этап. Исследование работоспособности
синтезированной СУ
6. Подробный план разработки СУ технологическим объектом
1.2.
3.
4.
5.
6.
7.
Характеристика объекта. Разработка концептуальной модели и
математического описания технологического процесса.
Исследование ММ ОУ (линеаризация математической модели
объекта, разработка структурно-алгоритмической схемы объекта;
проведение численного эксперимента). Разработка рекомендаций
по выбору каналов управления.
Формулировка и обоснование предложений по схеме
автоматизации технологического объекта.
Разработка структурной схемы системы управления в соответствии
с предложенной СА.
Алгоритмический синтез системы управления. Выбор закона
управления. Запись полной математической модели СУ.
Параметрическая идентификация ММ СУ. Определение
теплофизических, кинетических и др. коэффициентов, входящих в
уравнения объекта. Определение настроек регуляторов.
Разработка программы численного моделирования. Исследование
работоспособности и качества полученной СУ в соответствии с
заданными требованиями.
7. Структура и классификация САР
Всякая САР состоит из объекта регулирования, датчика,автоматического регулятора и исполнительного механизма с
регулирующим органом.
По принципу действия САР делят на группы:
1. САР по возмущению;
2. САР по отклонению;
3. Комбинированные САР.
8. САР объекта по возмущению
САР по возмущению оказывается разомкнутой, поэтому практически неприменяется в промышленных САР
9. САР объекта по отклонению
САР по отклонению является замкнутой. УУ включено как бы встречно поотношению к ОУ. Такое соединение двух элементов САР называют
соединением по принципу обратной связи.
10. Комбинированная САР
В некоторых случаях используются комбинированные САР, в которыхиспользуются оба принципа регулирования . Однако из-за относительной
сложности они применяются только в тех случаях, когда обычная САР по
отклонению не обеспечивает заданной точности регулирования.
11. Типовые законы регулирования
• Линейные• Нелинейные
Линейные регуляторы по виду характеристики делятся на:
Пропорциональные регуляторы (П-регуляторы) или
статические;
Интегральные регуляторы (И-регуляторы) или астатические;
Пропорционально-интегральные регуляторы (ПИрегуляторы) или изодромные;
Пропорционально-дифференциальные регуляторы (ПДрегуляторы) или регуляторы с предварением;
Пропорционально-интегрально-дифференциальные
регуляторы (ПИД-регуляторы) или изодромные регуляторы с
предварением.
12.
Методы определения настроечных параметров• метод моделирования
• используя экспериментальные графики,
номограммы
• формулы, полученные при аппроксимации
экспериментальных данных
• аналитические методы
13. Эмпирические формулы для расчёта настроек
Коэффициент передачи регулятора:Кр =
1
Кв ∗ ν в
Коб
e max
−1 ,
где
emax – максимальное допустимое значение ошибки регулирования;
νв – изменение значения ступенчатого возмущения;
Коб – коэффициент передачи основного канала регулирования;
Кв – коэффициент передачи основного канала возмущения.
Время интегрирования:
Tu = 0,475
Kоб∙Кр
(1+Kоб·Кр )2
∙ Tоб,
где
Тоб – время регулирования объекта;
Коб – коэффициент передачи основного канала регулирования;
Кр – коэффициент передачи ПИ- регулятора.
14. Исследование работоспособности и эффективности СУ
• показатели качества• устойчивость системы управления
• свойство инвариантности
• свойство ковариантности
• свойство робастности (грубости) СУ
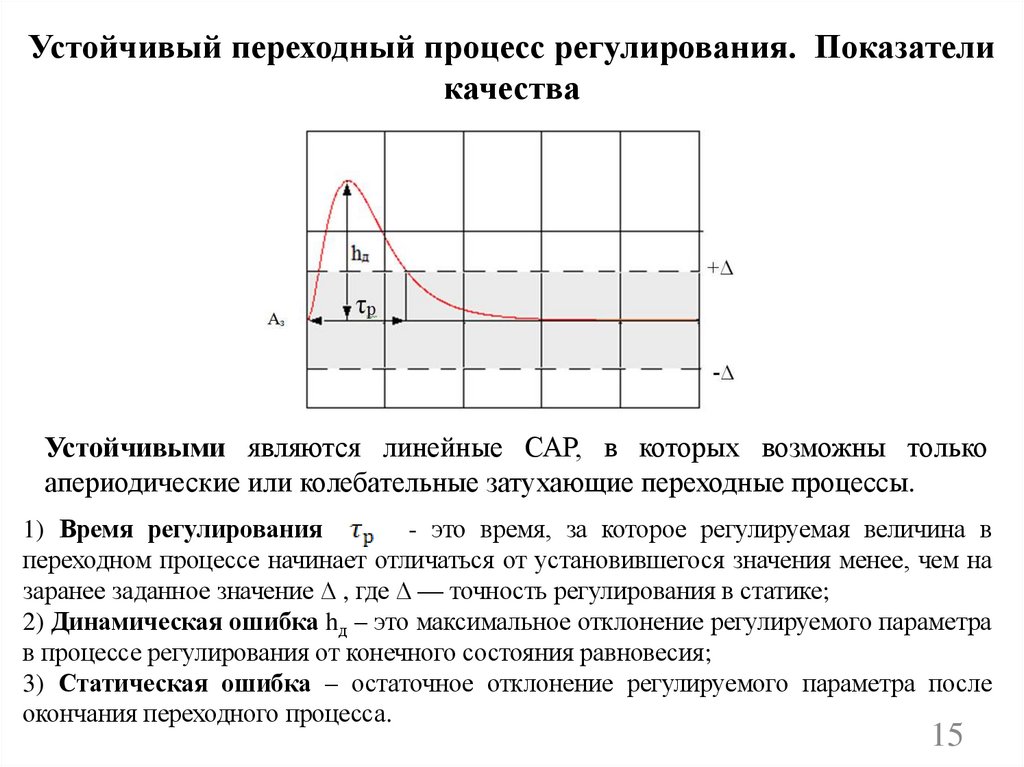
15.
Устойчивый переходный процесс регулирования. Показателикачества
Устойчивыми являются линейные САР, в которых возможны только
апериодические или колебательные затухающие переходные процессы.
1) Время регулирования
- это время, за которое регулируемая величина в
переходном процессе начинает отличаться от установившегося значения менее, чем на
заранее заданное значение ∆ , где ∆ — точность регулирования в статике;
2) Динамическая ошибка hд – это максимальное отклонение регулируемого параметра
в процессе регулирования от конечного состояния равновесия;
3) Статическая ошибка – остаточное отклонение регулируемого параметра после
окончания переходного процесса.
15
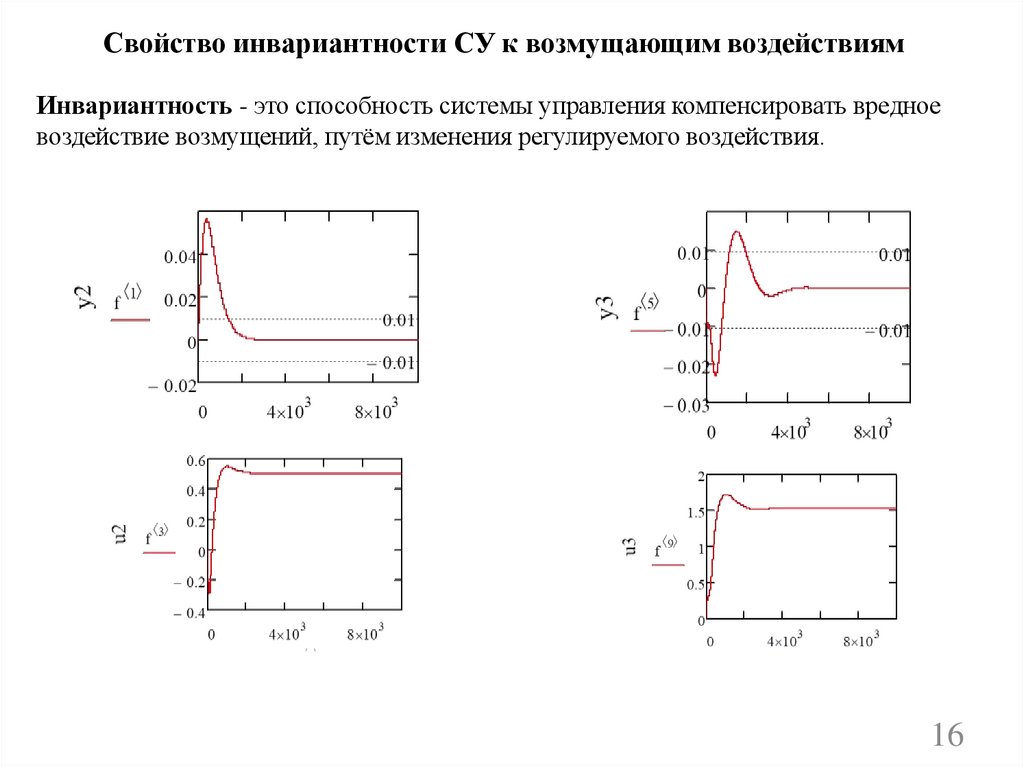
16.
Свойство инвариантности СУ к возмущающим воздействиямИнвариантность - это способность системы управления компенсировать вредное
воздействие возмущений, путём изменения регулируемого воздействия.
16
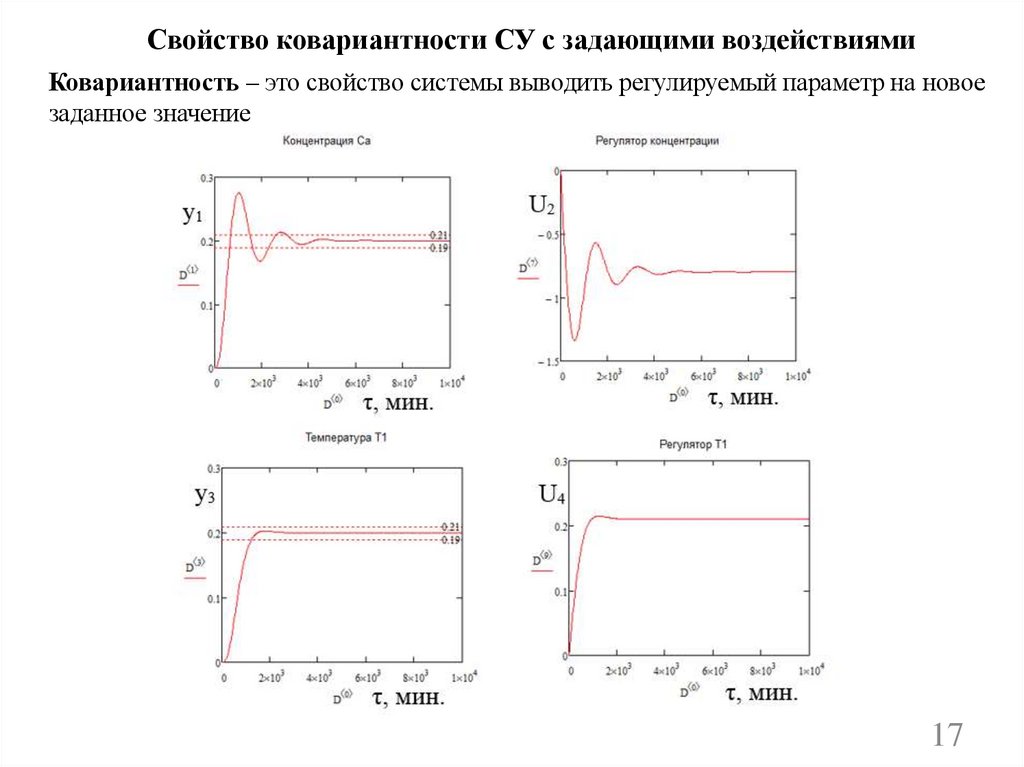
17.
Свойство ковариантности СУ с задающими воздействиямиКовариантность – это свойство системы выводить регулируемый параметр на новое
заданное значение
17