

 electronics
electronicsSimilar presentations:
. Основные понятия")
")


")





Основные этапы разработки системы управления технологическим объектом
1.
Основные этапы разработки системыуправления технологическим объектом
1 этап. Качественный анализ ОУ. Постановка
задачи
2 этап. Структурно-алгоритмический и
параметрический синтез СУ
3 этап. Исследование работоспособности
синтезированной СУ
2.
Подробный план разработки СУтехнологическим объектом
1.
2.
3.
4.
5.
6.
7.
Характеристика объекта. Разработка концептуальной модели и
математического описания технологического процесса.
Исследование ММ ОУ (линеаризация математической модели
объекта, разработка структурно-алгоритмической схемы объекта;
проведение численного эксперимента). Разработка рекомендаций
по выбору каналов управления.
Формулировка и обоснование предложений по схеме
автоматизации технологического объекта.
Разработка структурной схемы системы управления в соответствии
с предложенной СА.
Алгоритмический синтез системы управления. Выбор закона
управления. Запись полной математической модели СУ.
Параметрическая идентификация ММ СУ. Определение
теплофизических, кинетических и др. коэффициентов, входящих в
уравнения объекта. Определение настроек регуляторов.
Разработка программы численного моделирования. Исследование
работоспособности и качества полученной СУ в соответствии с
заданными требованиями.
3.
Емкостной смесительКонтуры управления на базе САР по отклонению
4.
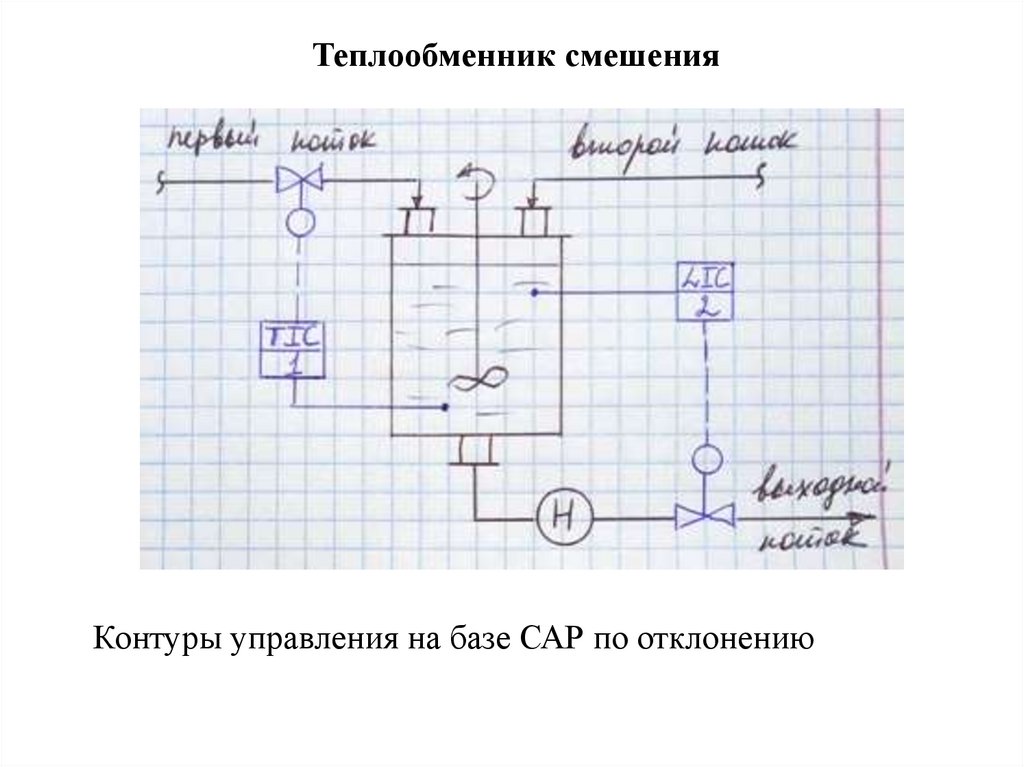
Теплообменник смешенияКонтуры управления на базе САР по отклонению
5.
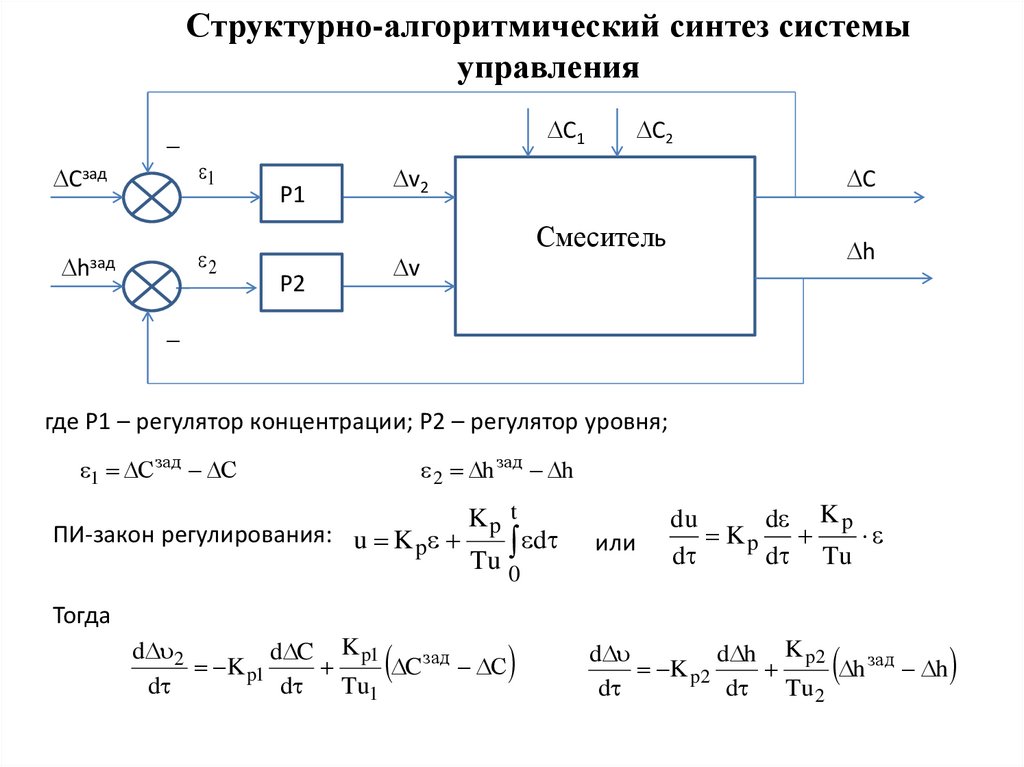
Структурно-алгоритмический синтез системыуправления
Cзад
C1
1
2
hзад
С2
v2
Р1
С
Смеситель
v
Р2
h
где Р1 – регулятор концентрации; Р2 – регулятор уровня;
1 Сзад С
2 h зад h
ПИ-закон регулирования: u K p
Тогда
Kp t
d
или
d
d h K p 2
K p 2
h зад h
d
d Tu 2
Tu 0
d 2
d C K p1
K p1
C зад С
d
d
Tu1
du
d K p
Kp
d
d Tu
6.
t11
tзад
hзад
2
Р1
t2
v1
t
Теплообменник
смешения
v
Р2
h
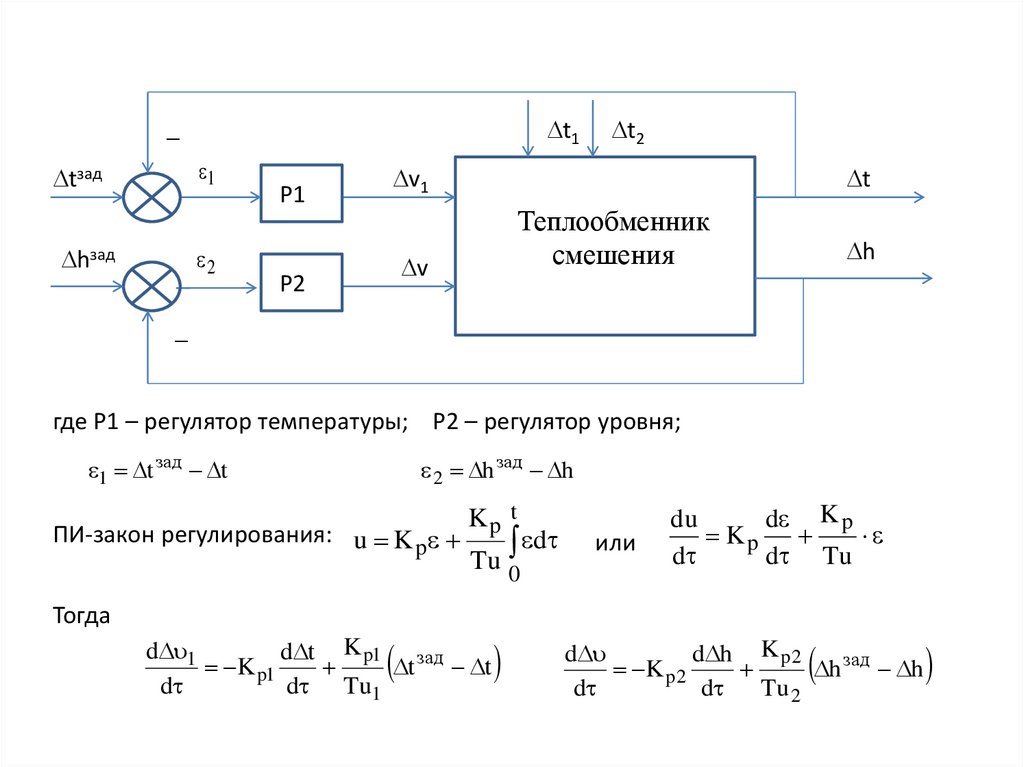
где Р1 – регулятор температуры; Р2 – регулятор уровня;
1 t зад t
2 h зад h
ПИ-закон регулирования: u K p
Тогда
Kp t
d
Tu 0
d 1
d t K p1 зад
K p1
t t
d
d Tu1
или
du
d K p
Kp
d
d Tu
d
d h K p 2
K p 2
h зад h
d
d Tu 2
7.
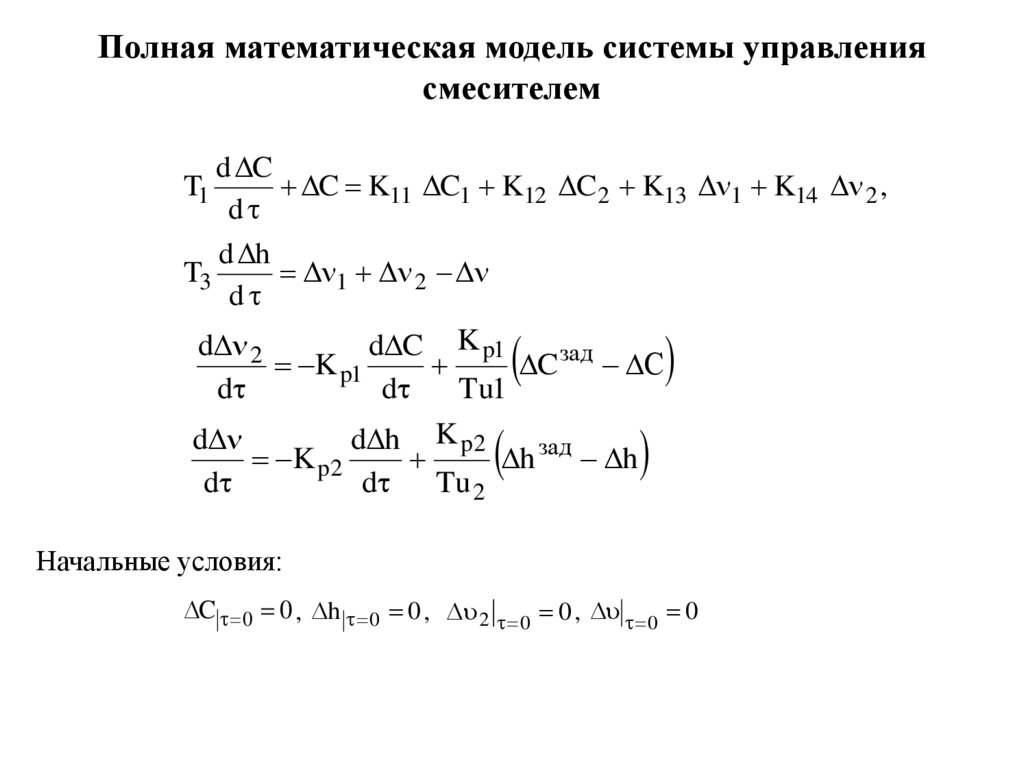
Полная математическая модель системы управлениясмесителем
d C
C K11 C1 K12 C 2 K13 1 K14 2 ,
d
d h
T3
1 2
d
d 2
d C K p1
K p1
C зад С
d
d
Tu1
T1
d
d h K p 2
K p 2
h зад h
d
d Tu 2
Начальные условия:
C 0 0 , h 0 0 , 2 0 0 , 0 0
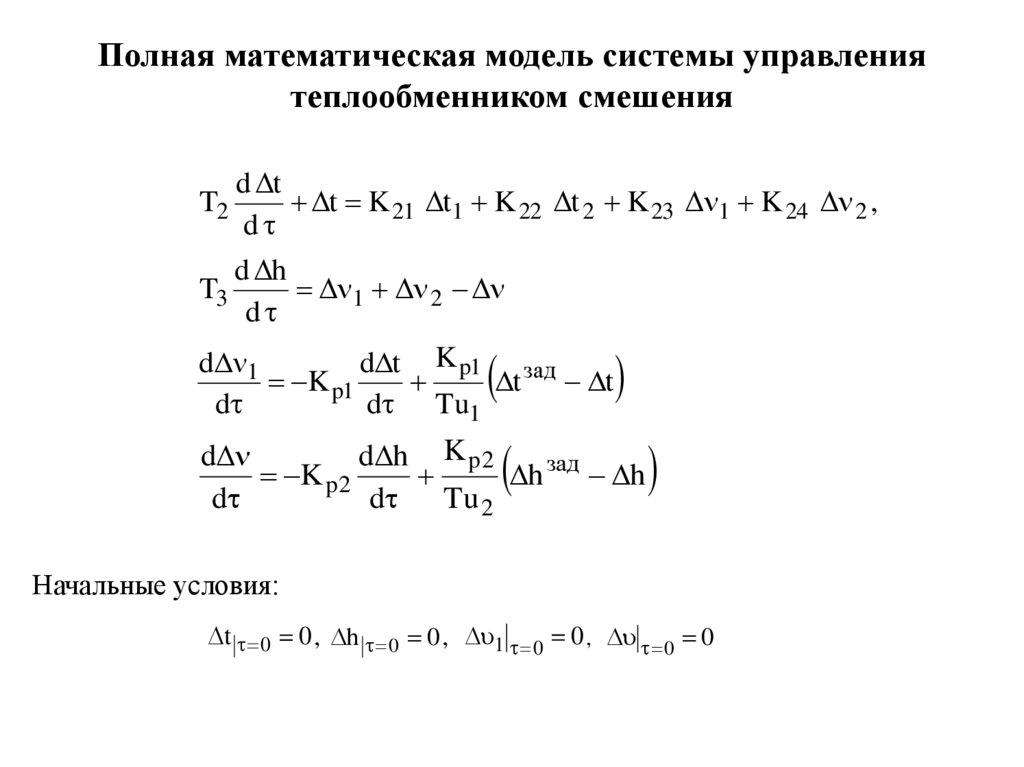
8.
Полная математическая модель системы управлениятеплообменником смешения
d t
t K 21 t1 K 22 t 2 K 23 1 K 24 2 ,
d
d h
T3
1 2
d
T2
d 1
d t K p1 зад
K p1
t t
d
d Tu1
d
d h K p 2
K p 2
h зад h
d
d Tu 2
Начальные условия:
t 0 0 , h 0 0 , 1 0 0 , 0 0
9.
Формулы для расчёта настроекКоэффициент передачи регулятора:
Кр =
1
Кв ∗ ν в
Коб
e max
−1 ,
где
emax – максимальное допустимое значение ошибки регулирования;
νв – изменение значения ступенчатого возмущения;
Коб – коэффициент передачи основного канала регулирования;
Кв – коэффициент передачи основного канала возмущения.
Время интегрирования:
Tu = 0,475
Kоб∗Кр
(1+Kоб·Кр )2
∗ Tоб,
где
Тоб – время регулирования объекта;
Коб – коэффициент передачи основного канала регулирования;
Кр – коэффициент передачи ПИ- регулятора.
10.
Для смесителя основным каналом управления является2 С,
канал возмущения для концентрации: С1 С.
максимально допустимая ошибка еmax=0,01 моль/л
Для теплообменника смешения основным каналом
управления является 1 t,
основным каналом возмущения для температуры: t2 t.
максимально допустимая ошибка еmax=1 С
Для регулятора уровня примем Кр2=-1 л/(мин. м), Ти2=5 мин.
11.
Содержание отчета:1. Характеристика технологического процесса как объекта управления
1.1. Концептуальная модель
1.2. Математическое описание технологического процесса
1.3. Расчет «рабочей» статической точки процесса
1.4. Линеаризованная форма ММ
1.5. Структурно-алгоритмическая схема объекта
1.6. Аппроксимация объекта типовыми динамическими звеньями
1.7. Расчет коэффициентов К и Т
1.8. Рекомендации по выбору регулируемых параметров и
регулирующих воздействий
2. Синтез математической модели системы управления
2.1. Предложения по схеме автоматизации
2.2. Структурная схема системы управления
2.3. Алгоритм управления. Уравнения регуляторов
2.4. Полная ММ СУ объектом
2.5. Расчет настроечных параметров
Заключение по работе