

 electronics
electronicsSimilar presentations:








")

Коррекция систем управления и применяемые методы
1.
УЛЬЯНОВСКИЙ ГОСУДАРСТВЕННЫЙ УНИВЕРСИТЕТФакультет математики, информационных и авиационных технологий
Кафедра математического моделирования технических систем
ДОКЛАД
на тему: “Коррекция систем управления и применяемые методы”
Выполнил студент - Ибрагимов Самат Айратович
Группы - САИУМ-о-23/1
Проверила - Седова Наталья Олеговна
г.Ульяновск, 2024
2.
КОРРЕКЦИЯ СИСТЕМ УПРАВЛЕНИЯКоррекция систем управления — это процесс обеспечения устойчивой и качественной работы
системы с помощью дополнительных устройств.
Для того чтобы добиться желаемого качества процесса управления, фактически требуемой точности и
качества переходного процесса, существует два пути:
1) Изменение параметров системы управления
2) Изменение структуры системы, за счет введения дополнительных звеньев
Основная задача корректирующих устройств: повышение точности системы управления и
обеспечения желаемого качества переходного процесса.
2
3.
ОСНОВНЫЕ ВИДЫ КОРРЕКЦИИСуществуют три основных вида корректирующих звеньев:
1) Последовательные корректирующие устройства
2) Параллельные корректирующие устройства
3) Местные корректирующие обратные связи;
3
4.
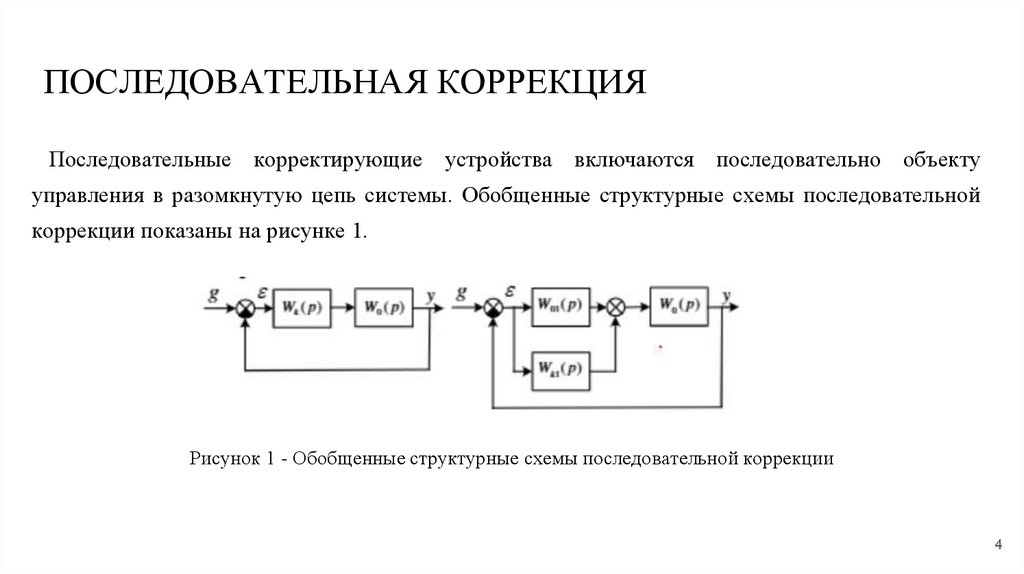
ПОСЛЕДОВАТЕЛЬНАЯ КОРРЕКЦИЯПоследовательные корректирующие устройства включаются последовательно объекту
управления в разомкнутую цепь системы. Обобщенные структурные схемы последовательной
коррекции показаны на рисунке 1.
Рисунок 1 - Обобщенные структурные схемы последовательной коррекции
4
5.
ПОСЛЕДОВАТЕЛЬНАЯ КОРРЕКЦИЯОбщая передаточная функция разомкнутой цепи системы:
(1)
(2), где
-
передаточные функции заданной части системы.
5
6.
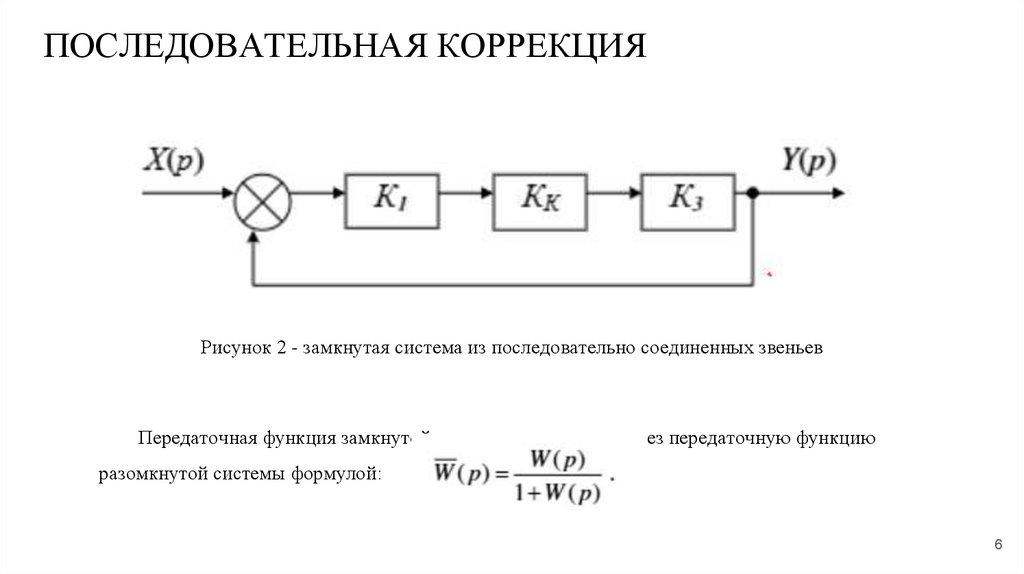
ПОСЛЕДОВАТЕЛЬНАЯ КОРРЕКЦИЯРисунок 2 - замкнутая система из последовательно соединенных звеньев
Передаточная функция замкнутой системы выражается через передаточную функцию
разомкнутой системы формулой:
6
7.
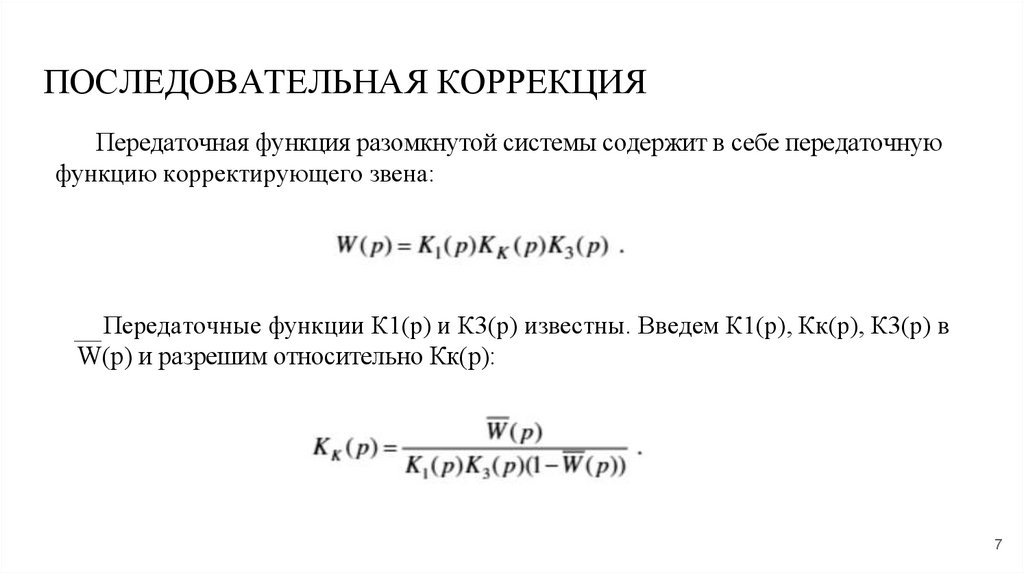
ПОСЛЕДОВАТЕЛЬНАЯ КОРРЕКЦИЯПередаточная функция разомкнутой системы содержит в себе передаточную
функцию корректирующего звена:
Передаточные функции К1(р) и К3(р) известны. Введем К1(р), Кк(р), К3(р) в
W(р) и разрешим относительно Кк(р):
7
8.
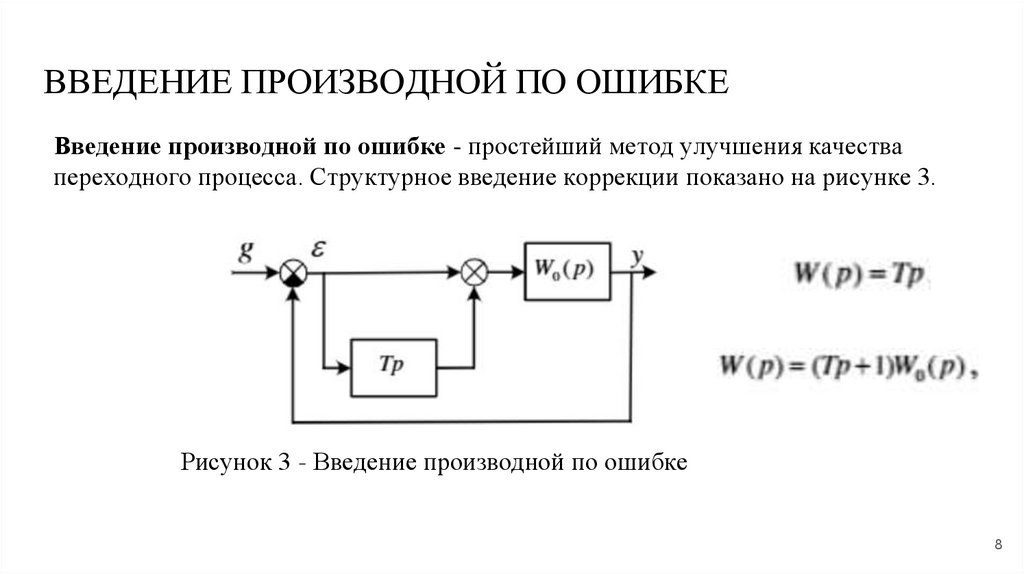
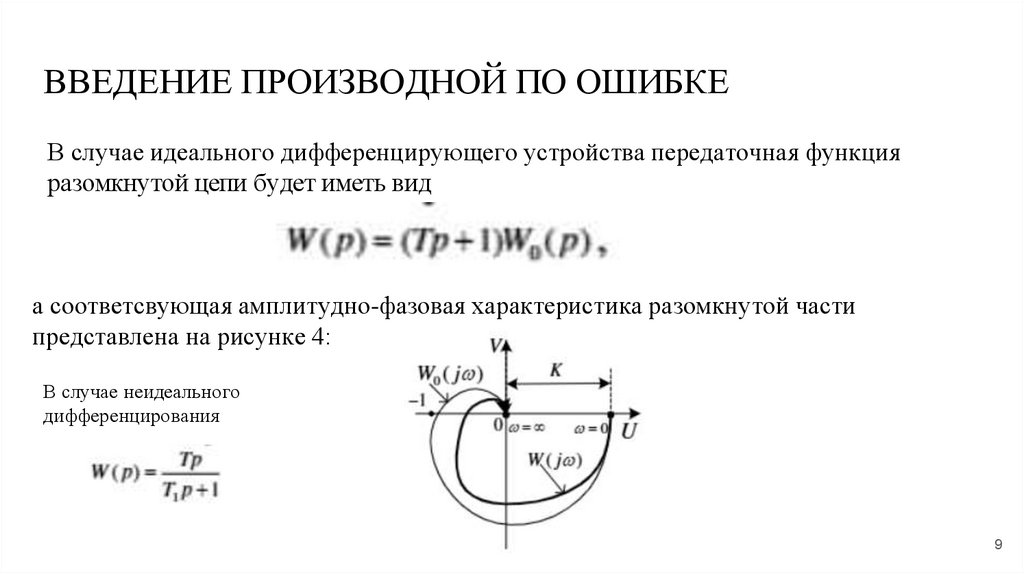
ВВЕДЕНИЕ ПРОИЗВОДНОЙ ПО ОШИБКЕВведение производной по ошибке - простейший метод улучшения качества
переходного процесса. Структурное введение коррекции показано на рисунке 3.
Рисунок 3 - Введение производной по ошибке
8
9.
ВВЕДЕНИЕ ПРОИЗВОДНОЙ ПО ОШИБКЕВ случае идеального дифференцирующего устройства передаточная функция
разомкнутой цепи будет иметь вид
а соответсвующая амплитудно-фазовая характеристика разомкнутой части
представлена на рисунке 4:
В случае неидеального
дифференцирования
9
10.
УВЕЛИЧЕНИЕ ОБЩЕГО КОЭФФИЦИЕНТА УСИЛЕНИЯ КУвеличение общего коэффициента усиления К разомкнутой цепи является
методом повышения точности системы (уменьшаются все виды установившихся
ошибок). Но увеличение К ведет, как известно, к ухудшению условия
устойчивости, а значит и качества переходного процесса. Поэтому часто
приходится это делать одновременно с введением производной.
10
11.
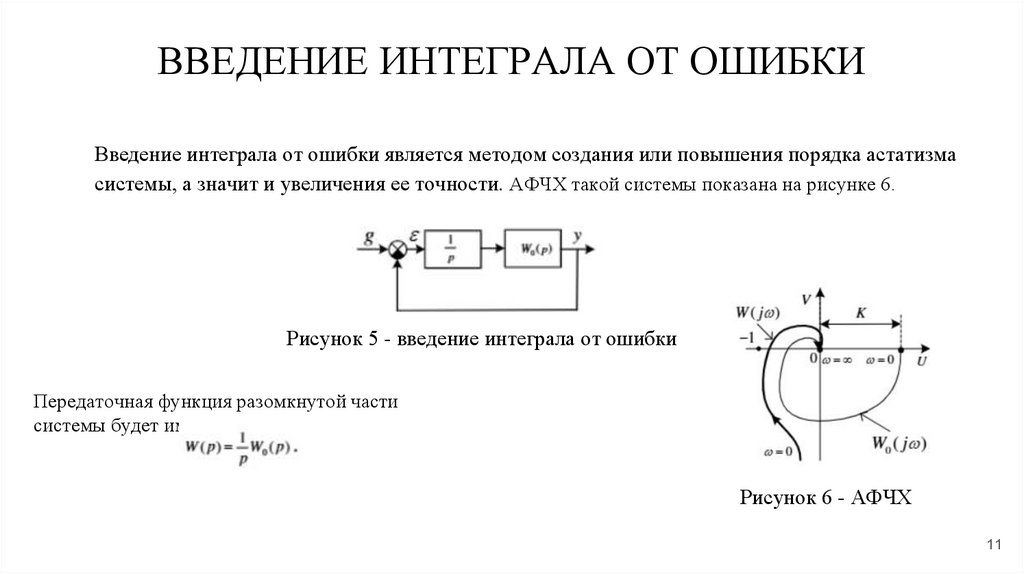
ВВЕДЕНИЕ ИНТЕГРАЛА ОТ ОШИБКИВведение интеграла от ошибки является методом создания или повышения порядка астатизма
системы, а значит и увеличения ее точности. АФЧХ такой системы показана на рисунке 6.
Рисунок 5 - введение интеграла от ошибки
Передаточная функция разомкнутой части
системы будет иметь вид:
Рисунок 6 - АФЧХ
11
12.
ПАРАЛЛЕЛЬНАЯ КОРРЕКЦИЯТакие корректирующие звенья пропускают параллельно основной цепи сам сигнал, его интеграл или производную.
Они исправляют какое-либо качество САР, не оказывая вредного влияния на другие.
Усилительное параллельное корректирующее звено (рисунок 7) – для придания устойчивости позиционно
неустойчивой системе.
Рисунок 7 - Усилительное параллельное корректирующее звено
В исходном состоянии наличие двух интегрирующих звеньев (k1/p и k2/p) делает систему позиционно
неустойчивой. Исправить это можно введением уси лительного звена (kк). Тогда для части САР, состоящей из
двух звеньев и k1/p,
Подбором коэффициентов можно добиться, чтобы kкp >> k1, тогда W≈kк, что устраняет
влияние одного из интегрирующих звеньев на устойчивость САР.
12
13.
ПАРАЛЛЕЛЬНАЯ КОРРЕКЦИЯИнтегрирующее параллельное корректирующее звено – для повышения порядка
астатизма (снижения статической ошибки). При этом устойчивость почти не
ухудшается (в отличие от последовательной коррекции), потому что управляющий
сигнал продолжает идти и по основной цепи.
Дифференцирующее параллельное корректирующее звено – для улучшения
быстродействия. Корректирующее звено подбирается с учетом постоянной времени
самого медлительного из звеньев главной связи, например двигателя, и тем самым
снижает инерционность системы в целом.
13
14.
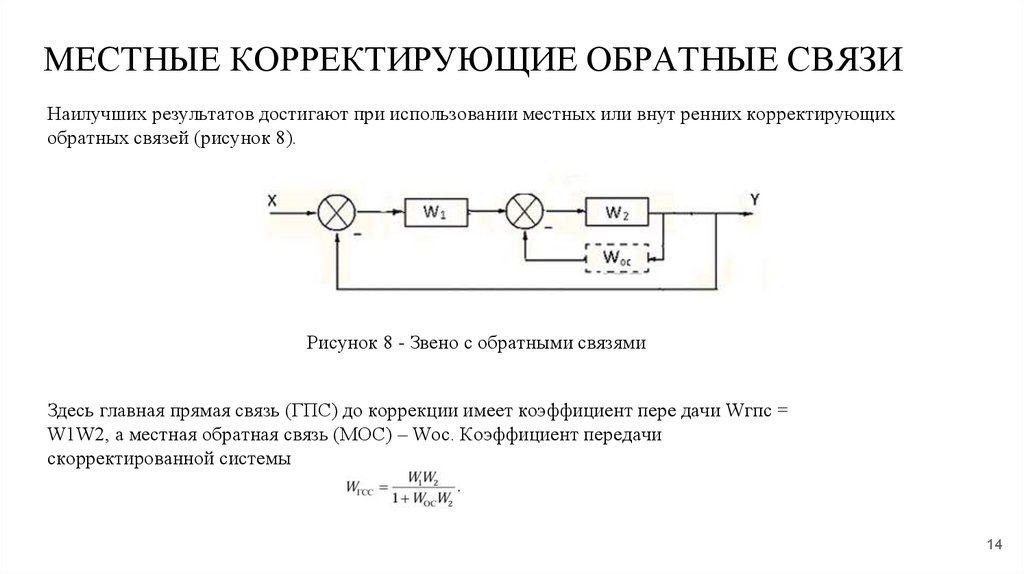
МЕСТНЫЕ КОРРЕКТИРУЮЩИЕ ОБРАТНЫЕ СВЯЗИНаилучших результатов достигают при использовании местных или внут ренних корректирующих
обратных связей (рисунок 8).
Рисунок 8 - Звено с обратными связями
Здесь главная прямая связь (ГПС) до коррекции имеет коэффициент пере дачи Wгпс =
W1W2, а местная обратная связь (МОС) – Wос. Коэффициент передачи
скорректированной системы
14
15.
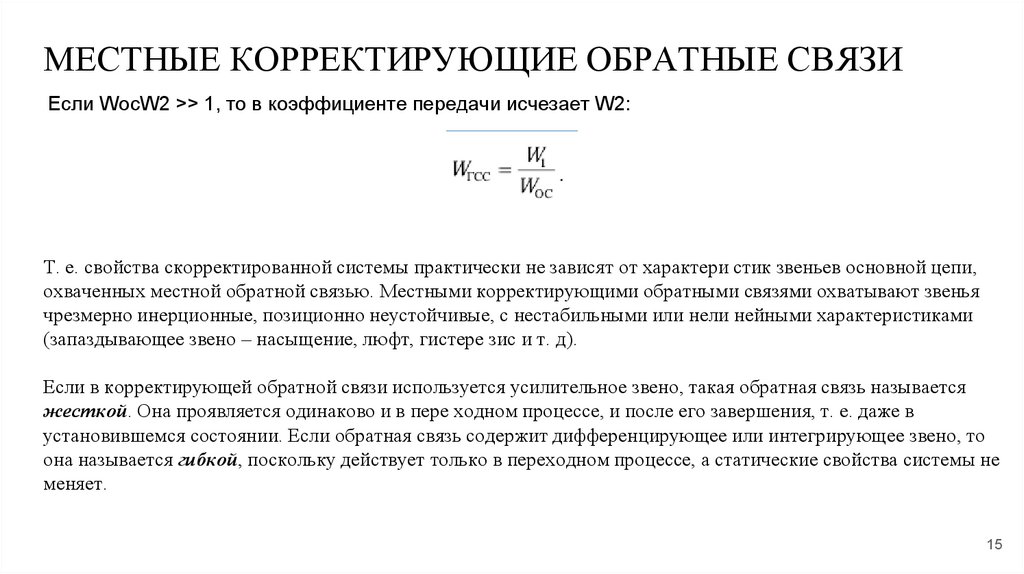
МЕСТНЫЕ КОРРЕКТИРУЮЩИЕ ОБРАТНЫЕ СВЯЗИЕсли WосW2 >> 1, то в коэффициенте передачи исчезает W2:
Т. е. свойства скорректированной системы практически не зависят от характери стик звеньев основной цепи,
охваченных местной обратной связью. Местными корректирующими обратными связями охватывают звенья
чрезмерно инерционные, позиционно неустойчивые, с нестабильными или нели нейными характеристиками
(запаздывающее звено – насыщение, люфт, гистере зис и т. д).
Если в корректирующей обратной связи используется усилительное звено, такая обратная связь называется
жесткой. Она проявляется одинаково и в пере ходном процессе, и после его завершения, т. е. даже в
установившемся состоянии. Если обратная связь содержит дифференцирующее или интегрирующее звено, то
она называется гибкой, поскольку действует только в переходном процессе, а статические свойства системы не
меняет.
15
16.
Спасибо за внимание!16