








 industry
industrySimilar presentations:










Средства автоматического улучшения управляемости
1.
ТЕМА 2.3.Лекция 12. Средства автоматического улучшения управляемости.
Средствами автоматического улучшения управляемости являются:
• автоматы управления; (продольного, путевого и поперечного)
• автоматы регулирования управления; (продольного, путевого и
поперечного)
• автоматы загрузки ; (продольного, путевого и поперечного)
• автоматы триммирования; (продольного, путевого и поперечного)
Общей
особенностью
автоматов
управления
является
дополнительное к ручному автоматическое отклонение руля при
воздействии пилота на рычаги управления.
В зависимости от вида системы управления (бустерная или
электродистанционная)
суммирование
может
осуществляться
механическим или электрическим способом.
На современных самолетах автоматы управления комплексируются с
автоматами демпфирования и устойчивости в единой системе и
работают одновременно и согласованно.
1
2.
Общей задачей автоматов регулирования управления и автоматовзагрузки является обеспечение постоянства статических характеристик
управляемости самолета при изменении режимов полета путем
воздействия на кинематику механической проводки управления.
Автоматы триммирования обеспечивают балансировку рулей высоты
при нарушении центровки самолета или изменении режима его полета
2
3.
2.3.3. Автоматы продольного управленияАвтоматы продольного управления (АПУ) - средства
автоматического управления, обеспечивающие улучшение продольной
управляемости самолета на всех этапах и во всех режимах полета путем
отклонения руля высоты при воздействии пилота на колонку штурвала.
Т.О. АПУ компенсируют недостатки демпферов и АПУс.
Простейший автомат продольного управления
вАПУ kхв xв
k хв
Коэффициент передачи, характеризует угол отклонения руля высоты на мм
отклонения колонки штурвала
Автомат продольного управления + демпфер тангажа
вАПУ k z z kxв xв
Автомат продольного управления + автомат устойчивости
вАПУ k z z kny ny kxв xв
3
4.
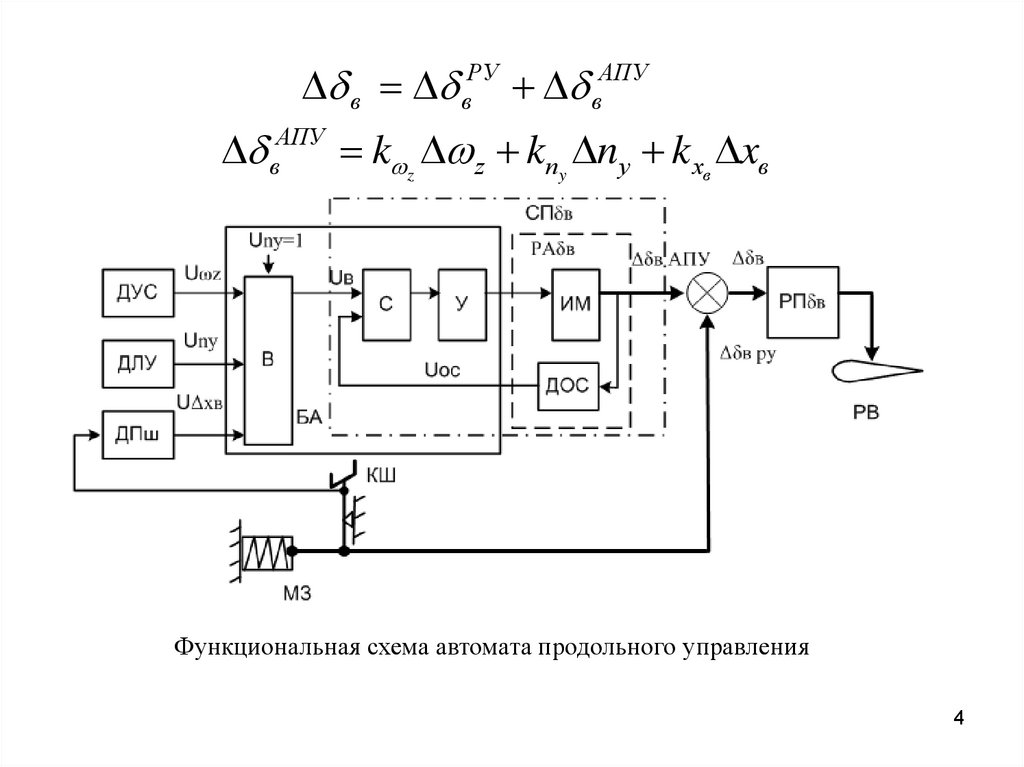
в вРУ вАПУвАПУ k z z kny ny kxв xв
Функциональная схема автомата продольного управления
4
5.
Влияние автоматов продольного управления на статическиехарактеристики управляемости самолета.
• Демпферная составляющая
k z z
и составляющая перегрузки
( xвnУ )
приводят к увеличению градиентов перемещений
и усилий
• Использование сигнала
штурвала
/
в
kш.в
хшв
k n y n y
( PвnУ )
x в в АПУ приводит к увеличению значения коэффициента
Такое увеличение коэффициента штурвала компенсирует увеличение
градиентов перемещений и усилий
/
в вPУ вАПУ kш.в xв kxв xв k z z kn y ny k ш.в
Δx в +k ωz ωz +k n y Δn y
ny
в АПУ
(x )
,
где
<
в y
n
( x в y ) ДТ
k ш .в
n
в y
/
k ш .в
n
n
в y xв
(P ) АПУ / Pв <
k ш .в
ny
в
/
k ш.в
=k ш.в +k xв
n
в y xв
n
Pв (Pв y ) ДТ
k ш .в
Таким образом, автомат продольного управления позволяет сохранить
статические характеристики продольной управляемости в заданных пределах.
5
6.
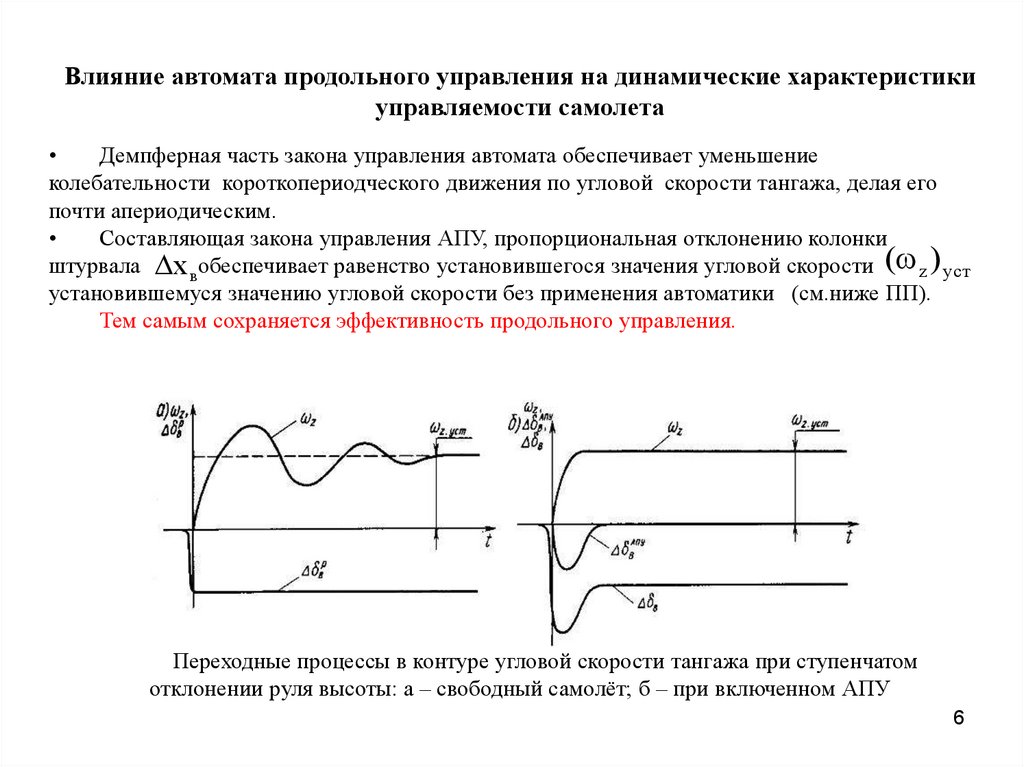
Влияние автомата продольного управления на динамические характеристикиуправляемости самолета
Демпферная часть закона управления автомата обеспечивает уменьшение
колебательности короткопериодческого движения по угловой скорости тангажа, делая его
почти апериодическим.
Составляющая закона управления АПУ, пропорциональная отклонению колонки
штурвала x вобеспечивает равенство установившегося значения угловой скорости ( z ) уст
установившемуся значению угловой скорости без применения автоматики (см.ниже ПП).
Тем самым сохраняется эффективность продольного управления.
Переходные процессы в контуре угловой скорости тангажа при ступенчатом
отклонении руля высоты: а – свободный самолёт; б – при включенном АПУ
6
7.
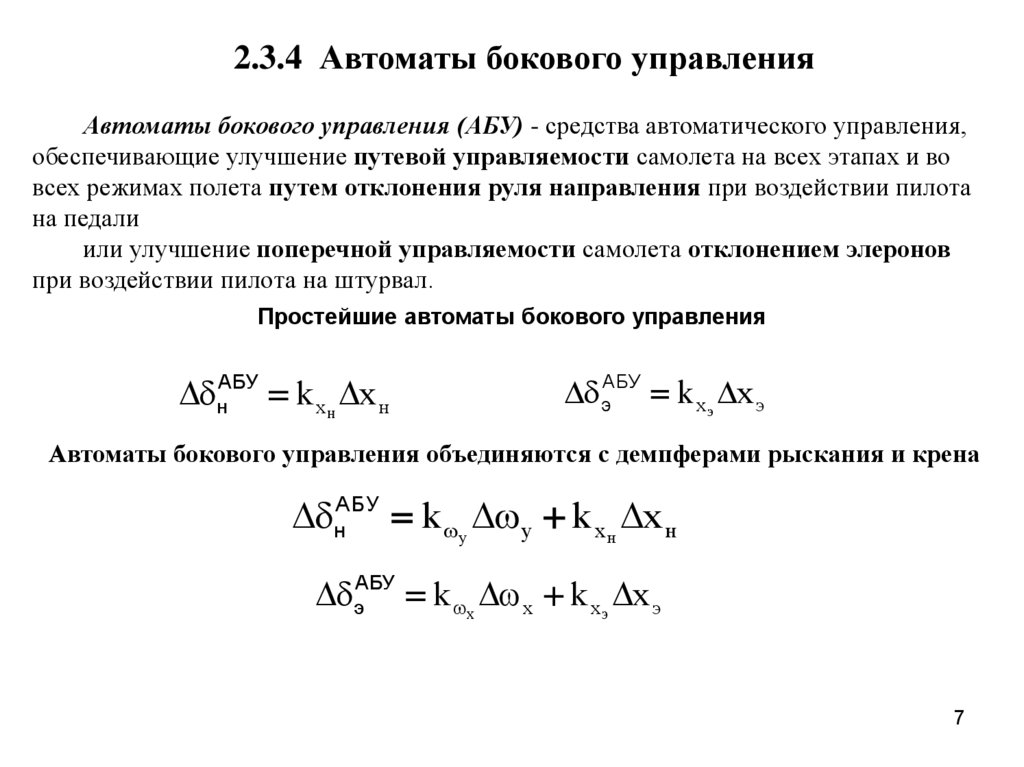
2.3.4 Автоматы бокового управленияАвтоматы бокового управления (АБУ) - средства автоматического управления,
обеспечивающие улучшение путевой управляемости самолета на всех этапах и во
всех режимах полета путем отклонения руля направления при воздействии пилота
на педали
или улучшение поперечной управляемости самолета отклонением элеронов
при воздействии пилота на штурвал.
Простейшие автоматы бокового управления
нАБУ k хн x н
эАБУ k хэ x э
Автоматы бокового управления объединяются с демпферами рыскания и крена
нАБУ k y y k xн x н
эАБУ k x x k xэ x э
7
8.
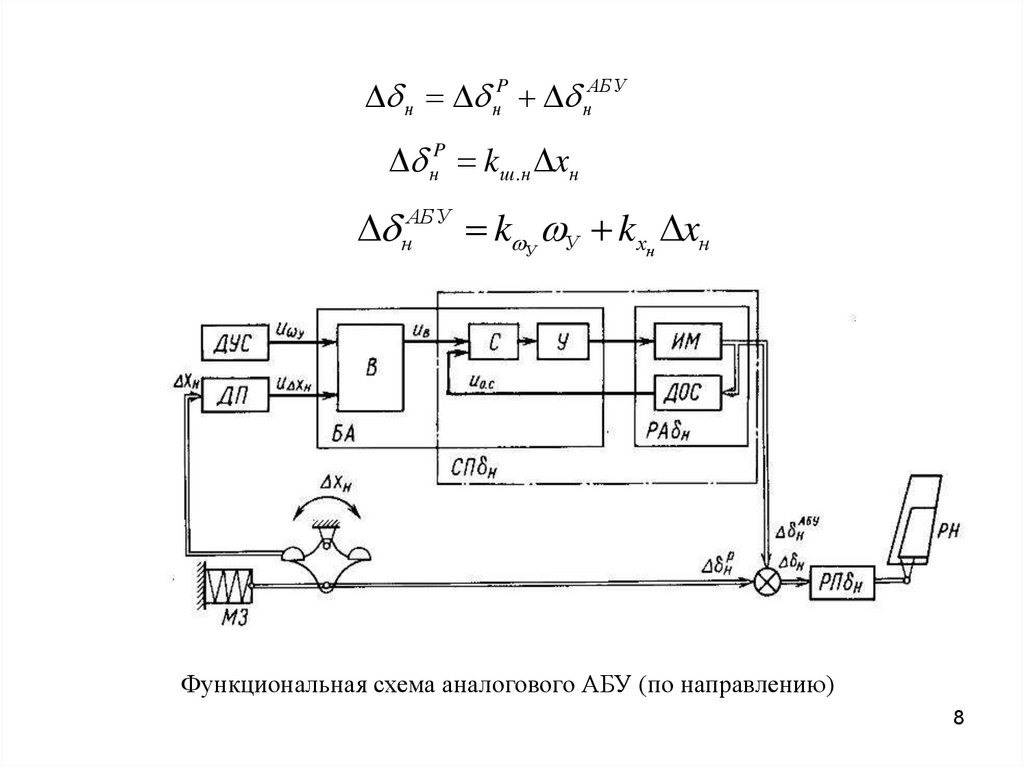
н нP нАБУнP kш.н xн
нАБУ k У У kxн xн
Функциональная схема аналогового АБУ (по направлению)
8
9.
Влияние автоматов бокового управления на статические характеристики управляемостисамолета.
• Демпферные составляющие в законах управления автоматов бокового управления, снижают
эффективность путевого и поперечного управления, увеличивая градиенты перемещений и
усилий на педалях и баранке штурвала.
• Дополнительное отклонение автоматом руля направления или элеронов при воздействии
пилота на педали или штурвал приводит к увеличению коэффициентов штурвала . Увеличение
коэффициентов штурвала компенсирует увеличение демпферами градиентов перемещений и
усилий.
Таким образом, автомат бокового управления позволяет сохранить статические
характеристики боковой управляемости в заданных пределах
н нP нАБУ k ш.н x н k У У k xн x н k ш/ .н x н k У У
,
/
э Pэ АБУ
k
x
k
k
x
k
э
ш.э
э
ч x
xэ
э
ш.э x э k ч x
где
н АБУ
(x )
x
k ш/ .н k ш.н k xн
н
н
/
( x н ) ДР
<
k ш .н
k ш.н
э АБУ
э < э
/
x э ДК
k ш.э
k ш.э
k ш/ .э k ш.э k x э
н АБУ
(P )
н x н
/ Pн
k ш.н
<
н
kш.н
Pнxн ( Pн )ДР
э Xэ
э x э
Pэ АБУ / Pэ < k Pэ Pэ ДК
k ш.э
ш .э
9
10.
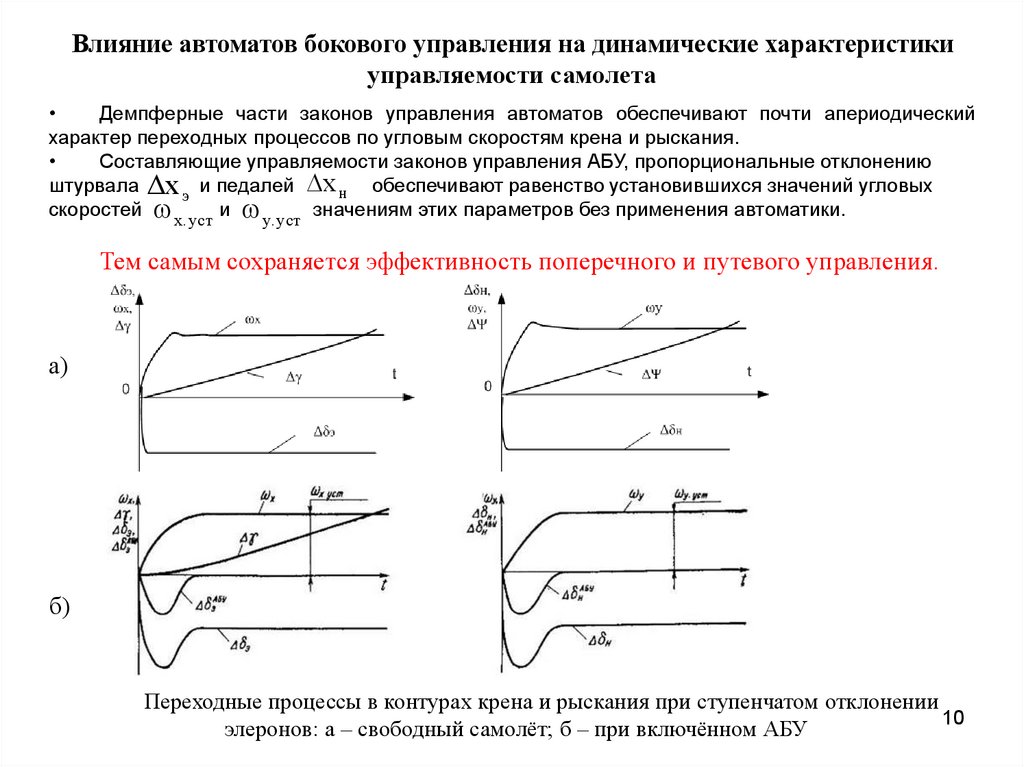
Влияние автоматов бокового управления на динамические характеристикиуправляемости самолета
Демпферные части законов управления автоматов обеспечивают почти апериодический
характер переходных процессов по угловым скоростям крена и рыскания.
Составляющие управляемости законов управления АБУ, пропорциональные отклонению
штурвала x э и педалей x н обеспечивают равенство установившихся значений угловых
скоростей x. уст и у. уст значениям этих параметров без применения автоматики.
Тем самым сохраняется эффективность поперечного и путевого управления.
а)
б)
Переходные процессы в контурах крена и рыскания при ступенчатом отклонении
10
элеронов: а – свободный самолёт; б – при включённом АБУ
11.
,2.3.5. АВТОМАТИЧЕСКОЕ РЕГУЛИРОВАНИЕ ПРОДОЛЬНОГО
УПРАВЛЕНИЯ (АРУ)
Характеристики управляемости самолета существенно изменяются при изменении
режима полета, прежде всего высоты и скорости полета, изменении конфигурации
самолета. Пилоту приходится приспосабливаться к этим фактам, прикладывая к
штурвалу различные усилия для достижения нужной управляемости.
На больших скоростях необходимо создавать
малые отклонения, на малых
скоростях – большие отклонения.
Напомним основные статические характеристики управляемости самолета:
11
12.
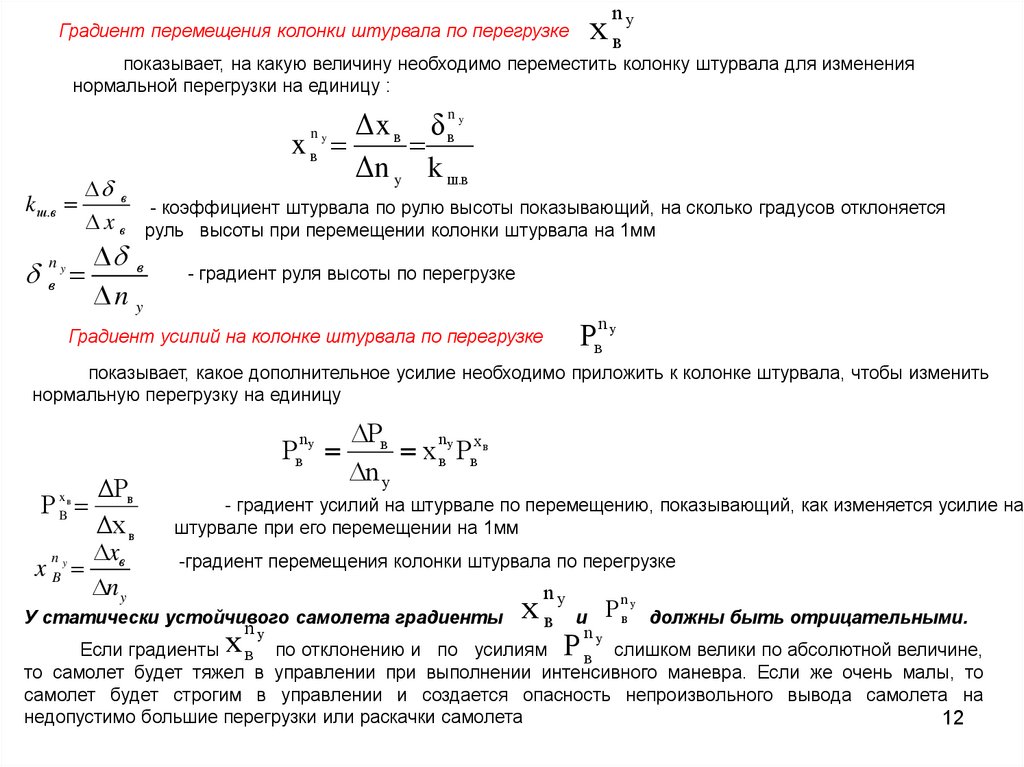
xГрадиент перемещения колонки штурвала по перегрузке
ny
в
показывает, на какую величину необходимо переместить колонку штурвала для изменения
нормальной перегрузки на единицу :
Δx в δ в
xв
Δn y k ш.в
ny
ny
k ш .в
в
- коэффициент штурвала по рулю высоты показывающий, на сколько градусов отклоняется
x в руль высоты при перемещении колонки штурвала на 1мм
в
ny
в
n y
- градиент руля высоты по перегрузке
n
в y
Градиент усилий на колонке штурвала по перегрузке
показывает, какое дополнительное усилие необходимо приложить к колонке штурвала, чтобы изменить
нормальную перегрузку на единицу
n
Pв y
ΔPв
Δx в
x
n
xB в
ny
Ρ Bx
в
y
Pв
n
x в y Pвxв
n y
- градиент усилий на штурвале по перемещению, показывающий, как изменяется усилие на
штурвале при его перемещении на 1мм
-градиент перемещения колонки штурвала по перегрузке
n
y
У статически устойчивого самолета градиенты x в и
n
ny
в
должны быть отрицательными.
ny
Если градиенты в по отклонению и по усилиям
в слишком велики по абсолютной величине,
то самолет будет тяжел в управлении при выполнении интенсивного маневра. Если же очень малы, то
самолет будет строгим в управлении и создается опасность непроизвольного вывода самолета на
недопустимо большие перегрузки или раскачки самолета
12
x
y
13.
Автомат регулирования продольного управления {АРУкшв) – этосредство автоматического управления, обеспечивающее постоянство
статических характеристик продольной управляемости самолета на всех
этапах и во всех режимах полета путем регулирования значения
коэффициента штурвала руля высоты при изменении режима полета.
в
kшв
xв
Т.е. АРУ обеспечивает единообразие пилотирования самолета при
изменении режимов полета
1. АРУ могут представлять собой автономные средства с собственным
сервоприводом, изменяющим кинематику механической проводки
управления рулем высоты.
2. Возможно также построение автомата на базе автомата продольной
управляемости, в этом случае автомат АРУ не имеет собственного
сервопривода и кинематики механической проводки не изменяет.
13
14.
Типовая программа измененияпередаточного числа по
перемещению ручки управления
x
k
Кинематическая схема изменения передаточных чисел СШУ (АРУ-3)
14
15.
1. Аналоговый автомат регулирования продольного управления.Обычно реализуется простейшая зависимость коэффициента
штурвала кш.в от приборной скорости
Зависимость коэффициента штурвала
руля высоты кш.в от приборной
скорости.
15
16.
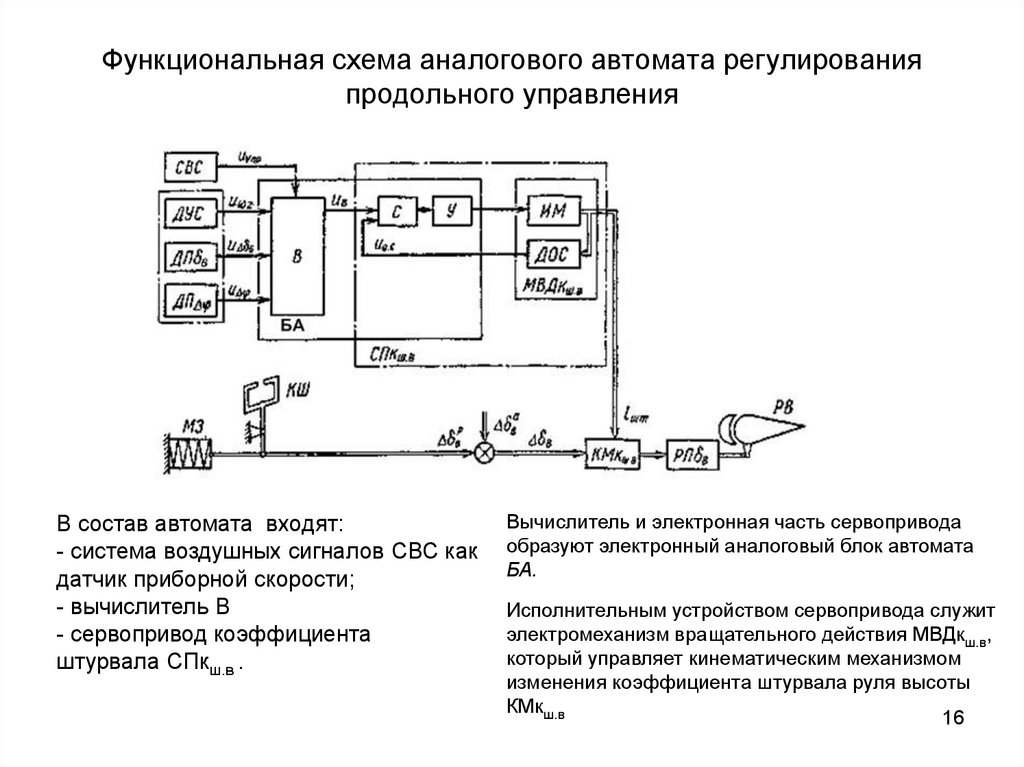
Функциональная схема аналогового автомата регулированияпродольного управления
В состав автомата входят:
- система воздушных сигналов СВС как
датчик приборной скорости;
- вычислитель В
- сервопривод коэффициента
штурвала СПкш.в .
Вычислитель и электронная часть сервопривода
образуют электронный аналоговый блок автомата
БА.
Исполнительным устройством сервопривода служит
электромеханизм вращательного действия МВДкш.в,
который управляет кинематическим механизмом
изменения коэффициента штурвала руля высоты
КМкш.в
16
17.
2. Влияние отказов и характеристик элементов автоматарегулирования продольного управления на управление
продольным движением.
Пассивный отказ автомата приводит к прекращению регулирования
коэффициента штурвала руля высоты по режимам полета.
Если такой отказ происходит на взлетном режиме, то весь последующий полет пилот выполняет
с большим значением коэффициента штурвала. Поэтому на больших скоростях пилоту трудно
соразмерить величину перемещения колонки штурвала с реакцией самолета. Небольшие
перемещения колонки штурвала создают чрезмерно быстрое изменение перегрузки, что
заставляет пилота отклонять колонку штурвала в обратную сторону. При этом создается опасность
непроизвольной раскачки самолета.
Если пассивный отказ происходит в крейсерском режиме на большой скорости, то весь
последующий полет пилот выполняет с малым значением коэффициента штурвала. Поэтому на
малых скоростях при заходе на посадку маневренные возможности самолета существенно
ограничены. Значительные перемещения колонки штурвала создают чрезмерно малое изменение
перегрузки, что затрудняет вывод самолета на посадочный угол атаки и создается опасность
грубой посадки. Поэтому обычно в АРУ предусматривается возможность ручного управления
изменением коэффициента штурвала до взлетно-посадочного значения кшвmax от аварийного
тумблера. При этом пилот переходит на непосредственное управление исполнительным
механизмом автомата, формируя постоянный управляющий сигнал на вход его сервопривода.
17
18.
Активный отказ автомата приводит к отработке исполнительным механизмом кинематикимеханической проводки в одно из крайних положений. Если такой отказ происходит на взлетном
режиме, то резко ограничиваются маневренные возможности самолета и возникает опасность
невыхода самолета на взлетный угол атаки.
Если отказ происходит в крейсерском режиме, возрастает опасность раскачки самолета.
Если отказ происходит при заходе на посадку, возникает опасность невыхода самолета на
посадочный угол атаки.. Поэтому в исполнительном механизме АРУ устанавливаются концевые
выключатели, обесточивающие автомат при значительных перемещениях выходного звена.
Радикальным методом, обеспечивающим уменьшение влияния автомата на безопасность
полета, является резервирование.
18
19.
3. АВТОМАТИЧЕСКОЕ РЕГУЛИРОВАНИЕ ПУТЕВОГО ИПОПЕРЕЧНОГО УПРАВЛЕНИЯ
Автомат регулирования путевого управления (АРУ kшн) - средство
автоматического управления, обеспечивающее постоянство статических
характеристик путевой управляемости путем регулирования значения
коэффициента штурвала направления при изменении режима полета.
Автомат регулирования поперечного управления (АРУ kшэ) - средство
автоматического управления, обеспечивающее постоянство статических
характеристик поперечной управляемости путем регулирования
значения коэффициента штурвала элеронов при изменении режима
полета.
1. Могут представлять собой автономные средства с собственным
сервоприводом, изменяющим кинематику механической проводки
управления рулем высоты.
2. Возможно также построение автомата на базе автомата продольной
управляемости, тогда собственного сервопривода автомат не имеет и
кинематики механической проводки не меняет.
19
20.
В аналоговых автоматах реализуются следующие зависимостикоэффициентов штурвала kшн и kшэ от приборной скорости:
Зависимость коэффициента штурвала
руля высоты кш.н и кш.э от приборной
скорости.
20
21.
Функциональная схема аналогового автомата регулированияпутевого управления
Вычислитель и электронная часть сервопривода
образуют электронный аналоговый блок
автомата БА
Исполнительным устройством сервопривода
служит электромеханизм вращательного
действия МВДкш.в, который управляет
кинематическим механизмом изменения
коэффициента штурвала руля высоты КМкш.в
В состав автомата входят:
- система воздушных сигналов СВС
как датчик приборной скорости;
- вычислитель В
- сервопривод коэффициента
штурвала СПкш.н .
- Канал ограничения хода педалей ,
состоящий из своего вычислителя В
и сервопривода СП Δхн.огр на базе
МЭТ
21
22.
Функциональная схема аналогового автоматарегулирования поперечной управляемости
В состав автомата входят:
- система воздушных сигналов СВС
как датчик приборной скорости;
- вычислитель В
- сервопривод коэффициента
штурвала СПкш.э .
Исполнительным устройством сервопривода
служит электромеханизм вращательного действия
МВДкш.э, который управляет кинематическим
механизмом изменения коэффициента штурвала
руля высоты КМкш.э
22