







 industry
industrySimilar presentations:










Демпфирование колебаний движения самолета
1.
Тема.2.2. Демпфированиеколебаний движения самолета
2.
ВведениеПилотажные характеристики комплекса СУУ — самолет (ЛА) должны
обеспечивать удобство ручного управления полетом в основной
эксплуатационной области режимов. Это означает, что диапазоны
перемещений рычагов управления и усилий, необходимых для их
перемещения, градиенты перемещений и усилий по перегрузке должны
находиться в определенных пределах, а ширина полосы пропускания
комплекса быть оптимальной для летчика и обеспечивать малое
запаздывание реакции на начальном этапе движения.
Современные СУУ рассчитаны (в отличие от систем автоматического
управления) на работу не только в основной эксплуатационной области
режимов, но и в предельной области и даже в критических режимах. Они
должны выполнять свои функции при произвольном маневрировании с
существенным изменением углового положения, в условиях больших
перегрузок, угловых скоростей и ускорений, при резких отклонениях рычагов
управления, при действии на самолет больших внешних возмущений и т. д. В
связи с этим разрабатываются различные сигнализаторы и автоматы,
улучшающие динамические характеристики ВС.
3.
‘Лекция 9. Демпфер тангажа
1. Принцип действия демпфера тангажа.
2. Влияние демпферов тангажа на характеристики
продольной устойчивости и управляемости.
3. Особенности законов управления демпферов тангажа.
4. Влияние отказав и характеристик демпферов тангажа на
управление продольным движением
4.
2.2.1. Принцип действия демпфера тангажа.Демпфер тангажа (ДТ) - средство автоматического управления,
обеспечивающее демпфирование продольных короткопериодических колебаний
самолета на всех этапах полета путем отклонения руля высоты при возникновении
угловой скорости тангажа.
ДТ
в
k z z
вДТ
автоматическое отклонение руля высоты от балансировочного
положения демпфером тангажа;
k z
передаточный коэффициент по угловой скорости тангажа,
показывающий на какой угол должен отклониться руль высоты
при изменении угловой скорости на 1 град/с (рад/с).
Демпферы тангажа устанавливаются на самолеты с бустерной или
электродистанционной системами управления рулем высоты. Это позволяет
обеспечить последовательную схему включения исполнительного устройства
демпфера в механическую проводку руля высоты.
5.
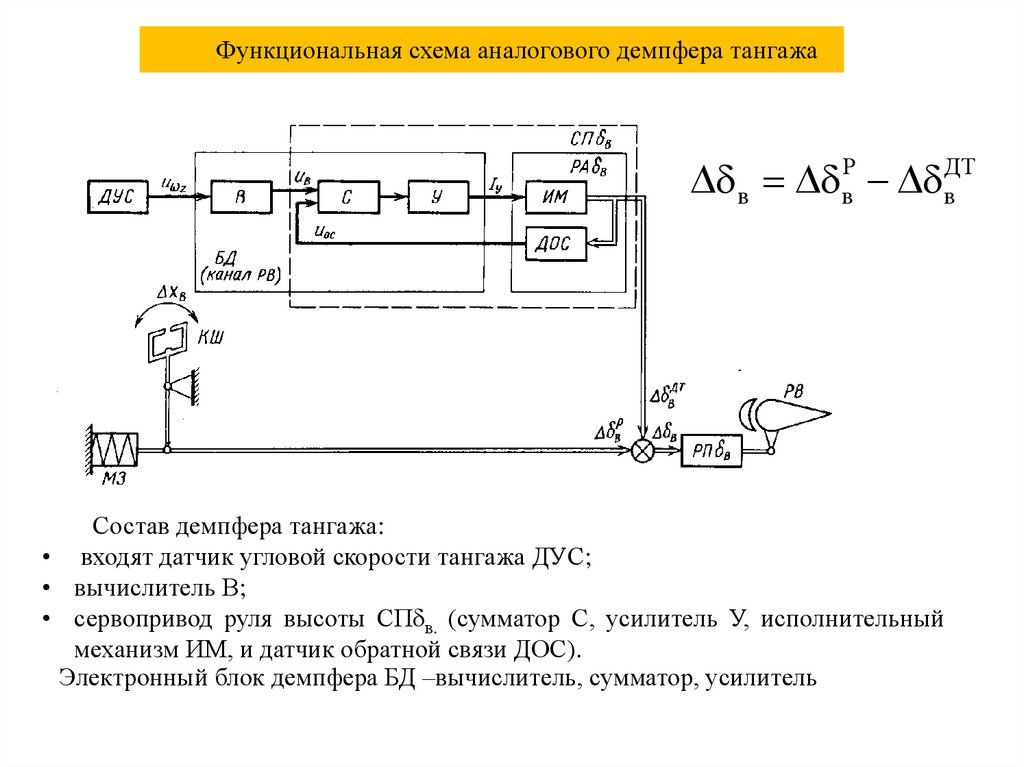
Функциональная схема аналогового демпфера тангажав
Р
в
ДТ
в
Состав демпфера тангажа:
• входят датчик угловой скорости тангажа ДУС;
• вычислитель В;
• сервопривод руля высоты СП в. (сумматор С, усилитель У, исполнительный
механизм ИМ, и датчик обратной связи ДОС).
Электронный блок демпфера БД –вычислитель, сумматор, усилитель
6.
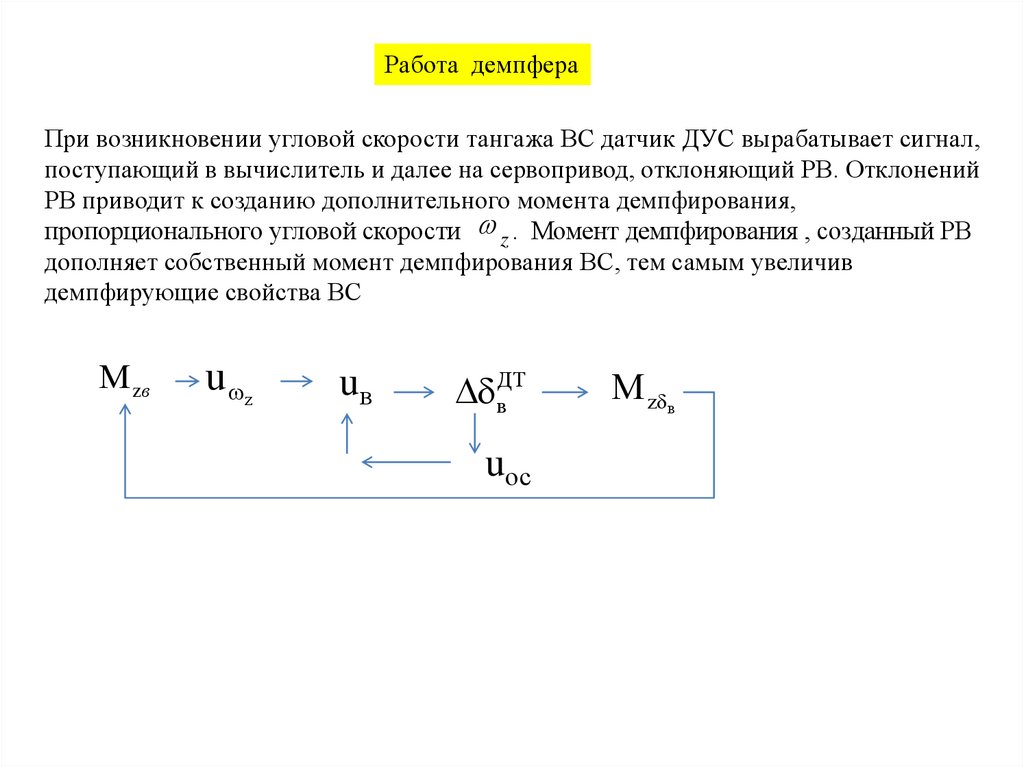
Работа демпфераПри возникновении угловой скорости тангажа ВС датчик ДУС вырабатывает сигнал,
поступающий в вычислитель и далее на сервопривод, отклоняющий РВ. Отклонений
РВ приводит к созданию дополнительного момента демпфирования,
пропорционального угловой скорости z . Момент демпфирования , созданный РВ
дополняет собственный момент демпфирования ВС, тем самым увеличив
демпфирующие свойства ВС
М zв
u z
uв
вДТ
uос
М z в
7.
2.2.2. Влияние демпферов тангажа на характеристики продольнойустойчивости и управляемости.
• с помощью демпфера тангажа повышается степень продольной статической
устойчивости по перегрузке (см. лекция 5). СЛЕДУЮЩИЙ слайд
пДТ
п
• улучшается динамическая устойчивость продольного движения.
Переходные процессы в контуре угловой
скорости тангажа при кратковременном
внешнем возмущении .
Процесс характеризуется периодом
собственных продольных короткопериодических
колебаний Тк и временем затухания t к .
зат
а – свободный самолёт;
б – при включённом демпфере тангажа
к
TкДТ и (t зат)ДТ лучше, чем у самолета без демпфера.
8.
Основной характеристикой продольной статической устойчивости являетсястепень продольной статической устойчивости по перегрузке п
dm R z
m
cy
п
m
z
d
c
ya V const
z
z
c
mRz
2
кабрирование
1
m zy x T x F , m z z m z
-ΔCya +ΔCya
2m
Sb a
,
z z
z
+ΔmRz
+ΔmRz
V
ba
Самолет статически устойчивым по перегрузке,
c
если m y 0 , (x F x T ), или п 0.
Cya
Демпфирование продольного движения
увеличивает статическую устойчивость по
перегрузке, т.к. mz 0
z
-ΔmRz
-ΔmRz
Cyaбал
пикирование
полная
производная
коэффициента
момента тангажа по коэффициенту подъемной
силы при фиксированном руле высоты в
квазиустановившемся
криволинейном
движении самолета в вертикальной плоскости
с постоянной скоростью, где
-ΔCya
+ΔCya
Зависимость коэффициента результирующего
аэродинамического момента тангажа от коэффициента
аэродинамической подъемной силы:
1-устойчивый самолет; 2- неустойчивый самолет.
8
V
ba
9.
Основным недостатком демпфера тангажа с простейшим законом управления является:Уменьшение эффективности управления рулем высоты от колонки штурвала.
ДТ
Это приводит к уменьшению установившегося значения угловой скорости z уст по сравнению
с управлением без демпфера тангажа
вР
z
вДТ кд z
ДТ
z
уст
Для создания угловой скорости ( z ) уст
‘
‘
пилот прикладывает большие
усилия и дает большие
перемещения колонки штурвала, компенсируя
увеличение демпфером тангажа градиентов усилий
( Pв y ) ДТ
n
dPв
dny
и перемещений
( X в y ) ДТ
n
dХ в
dny
10.
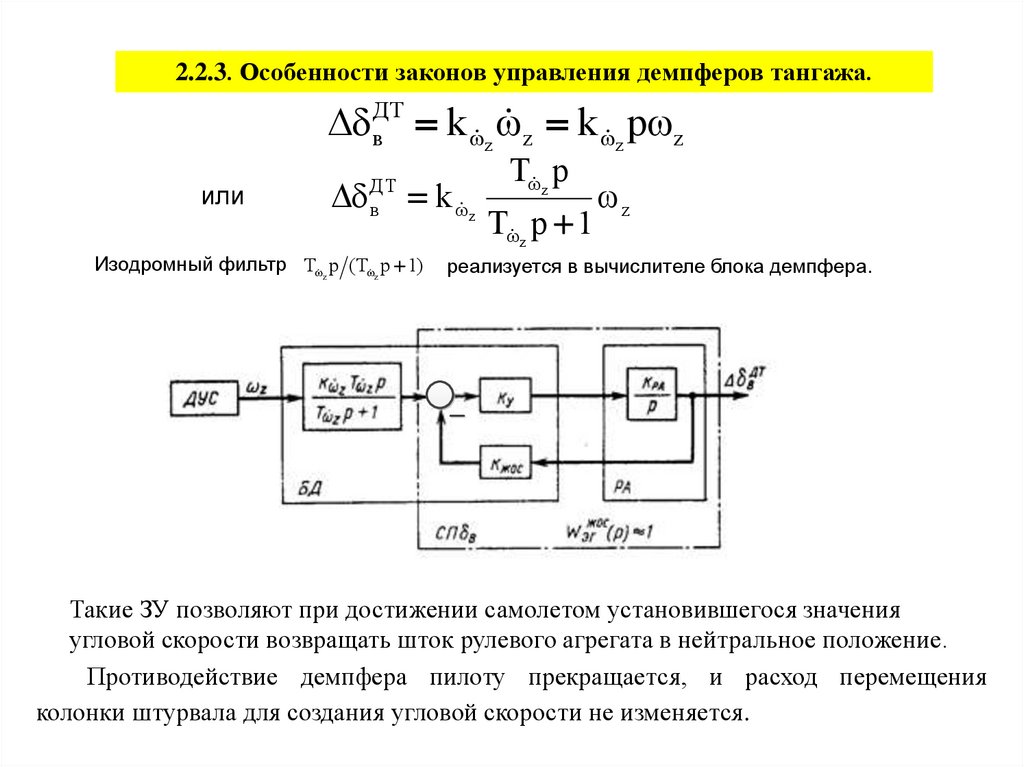
2.2.3. Особенности законов управления демпферов тангажа.или
ДТ
в
ДТ
в
z k z p z
k z
k z
Изодромный фильтр T z p (T z p 1)
T z p
T z p 1
z
реализуется в вычислителе блока демпфера.
Такие ЗУ позволяют при достижении самолетом установившегося значения
угловой скорости возвращать шток рулевого агрегата в нейтральное положение.
Противодействие демпфера пилоту прекращается, и расход перемещения
колонки штурвала для создания угловой скорости не изменяется.
11.
2.2.4. Влияние отказов и характеристик элементов демпфера тангажа науправление продольным движением.
Пассивные отказы не приводят к перекладкам рулей и их воздействие аналогично
выключению автоматического средства из процесса управления полетом:
Сопровождается возвращением штока рулевого агрегата в нейтральное
положение, что приводит к тому, что эффективность демпфирования
продольных короткопериодических колебаний резко падает, а
эффективность управления самолетом от колонки штурвала возрастает.
Управляя, летчик может «раскачать» самолет.
Активные отказы приводят к перекладкам рулей и непосредственным образом
влияют на динамику управления полетом.
Сопровождается отработкой штока рулевого агрегата на максимальный ход, что
приводит к выводу самолета на недопустимые нормальные перегрузки.
Обрыв цепи обратной связи в сервопривода приводит к возрастанию
коэффициента усиления сервопривода до значительной величины, равной
произведению коэффициентов усиления усилителя и рулевого агрегата kс=kраkу.
, контур тангажа может стать неустойчивым.
Ограничение хода штока рулевого агрегата снижает эффективность демпфирования
при значительных возмущениях.
12.
Нелинейность статических характеристик демпфера тангажа ограничиваютвозможность расширения полосы пропускания сервопривода.
При большом коэффициенте усиления в контуре сервопривода могут
возникать автоколебания низкой частоты.
Широкополосная помеха в сигнале угловой скорости тангажа с датчика
ДУС может быть обусловлена вибрацией и изгибными колебаниями
конструкции самолета. При расширении полосы пропускания сервопривода
такая помеха способна вызвать, так называемый, "автопилотный флаттер"
рулевых поверхностей
В аналоговых средствах автоматического управления одним из основных
факторов, влияющих на эффективность их эксплуатации, является "дрейф
нулей" датчиков и разрегулировки передаточных коэффициентов.