




 mathematics
mathematicsSimilar presentations:

")

. Формула Эйлера")





")
Продольная статическая устойчивость
1.
MOSCOW AVIATION INSTITUTEПродольная статическая
устойчивость
(продолжение, Лекция 14.05.2020
1
2.
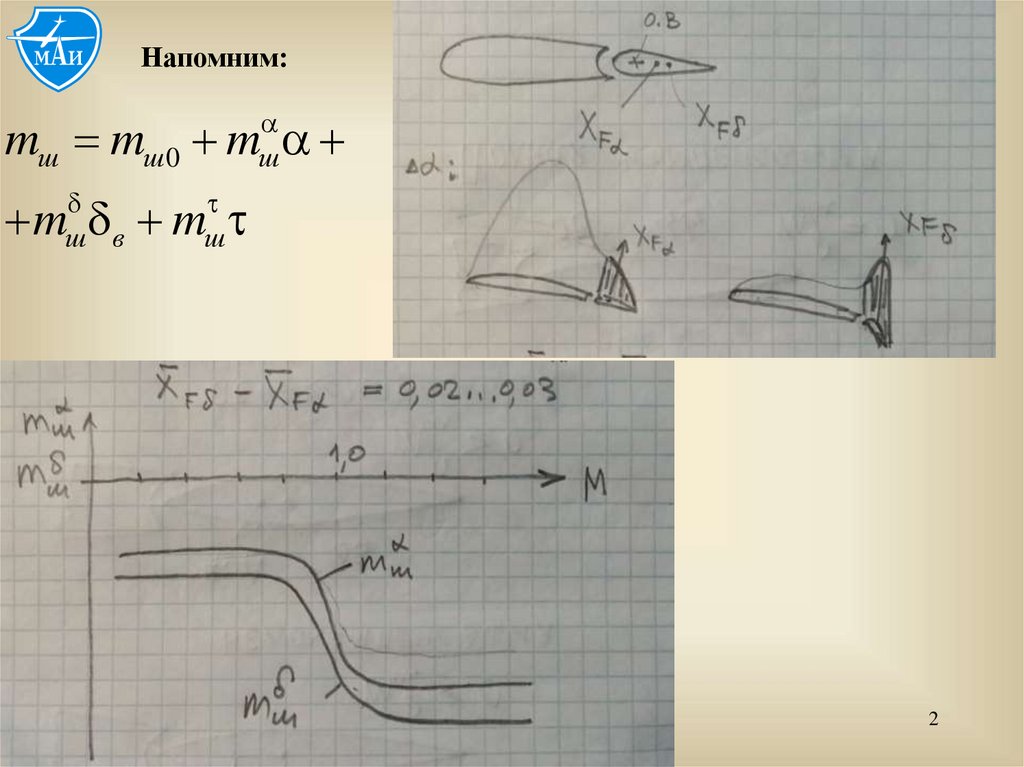
Напомним:ш
mш mш 0 m
ш в
ш
m m
2
3.
34.
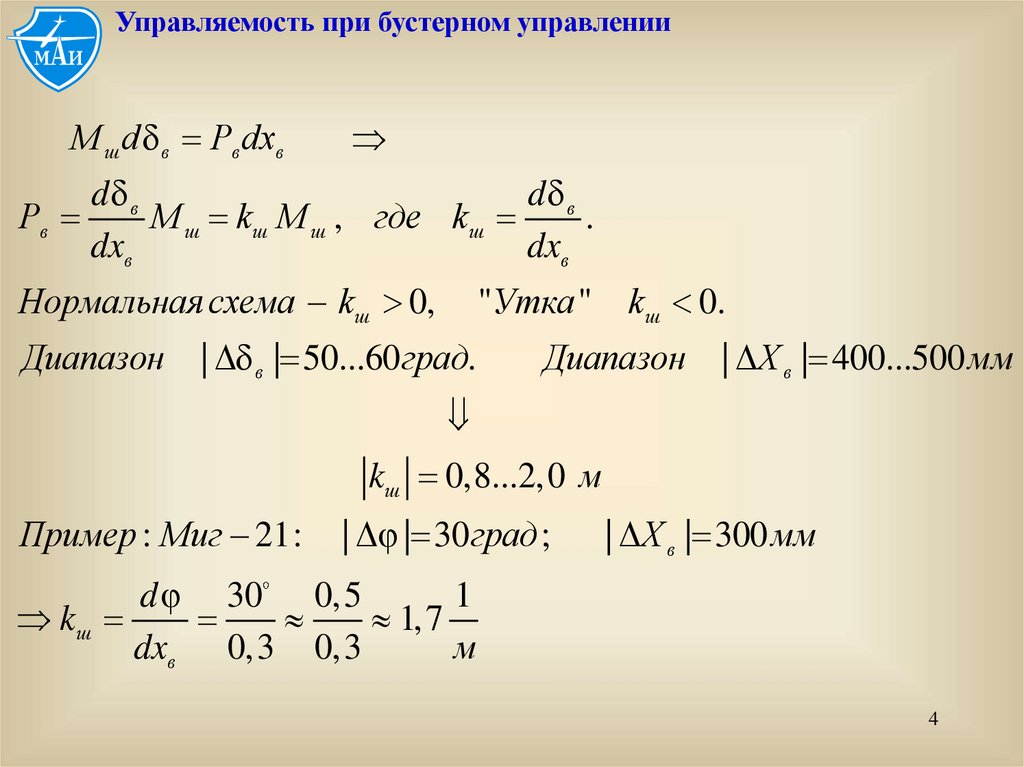
Управляемость при бустерном управленииМ ш d в Рв dxв
d в
d в
Рв
М ш kш М ш , где kш
.
dxв
dxв
Нормальная схема kш 0,
"Утка " kш 0.
Диапазон | в | 50...60 град.
Диапазон | X в | 400...500 мм
kш 0,8...2, 0 м
Пример : Миг 21:
| | 30 град ;
| X в | 300 мм
d 30 0,5
1
kш
1, 7
dxв 0,3 0,3
м
4
5.
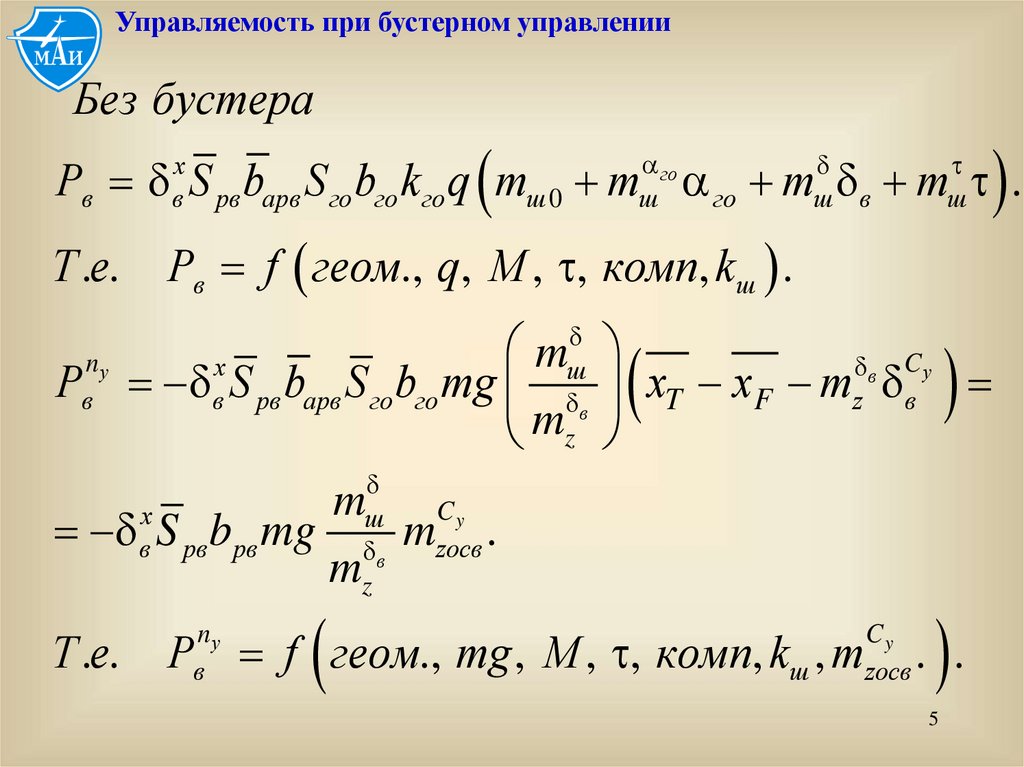
Управляемость при бустерном управленииБез бустера
го
ш
ш в
ш
Рв S рв bарв S гоbго kго q mш 0 m го m m .
х
в
Т .е.
Рв f геом., q, M , , комп, kш .
m
в C y
Р S рв bарв S гоbго mg
xT xF mz в
m
mш C y
х
в S рв bрв mg в mzосв .
mz
nу
в
Т .е.
ш
в
z
х
в
Р f геом., mg , M , , комп, kш , m
nу
в
Cy
zосв
. .
5
6.
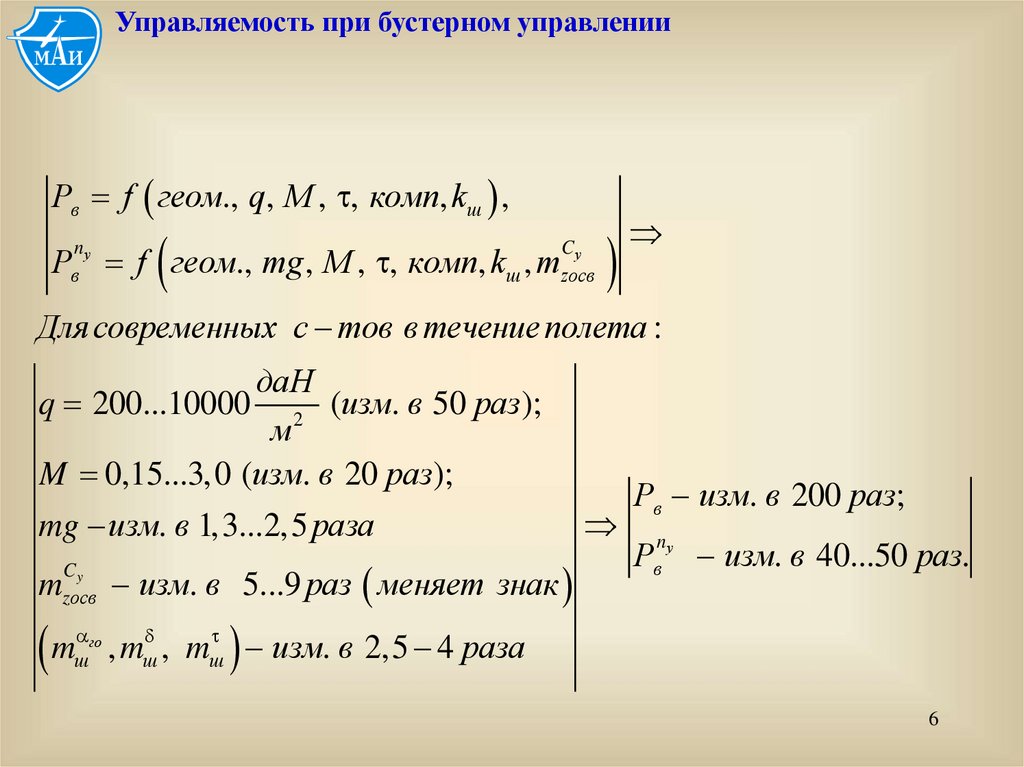
Управляемость при бустерном управленииРв f геом., q, M , , комп, kш ,
Р f геом., mg , M , , комп, kш , m
nу
в
Cy
zосв
Для современных с тов в течение полета :
даН
(изм. в 50 раз);
2
м
M 0,15...3, 0 (изм. в 20 раз);
mg изм. в 1,3...2,5 раза
q 200...10000
y
mzосв
изм. в 5...9 раз меняет знак
C
Рв изм. в 200 раз;
Рв у изм. в 40...50 раз.
n
mш го , mш , mш изм. в 2,5 4 раза
6
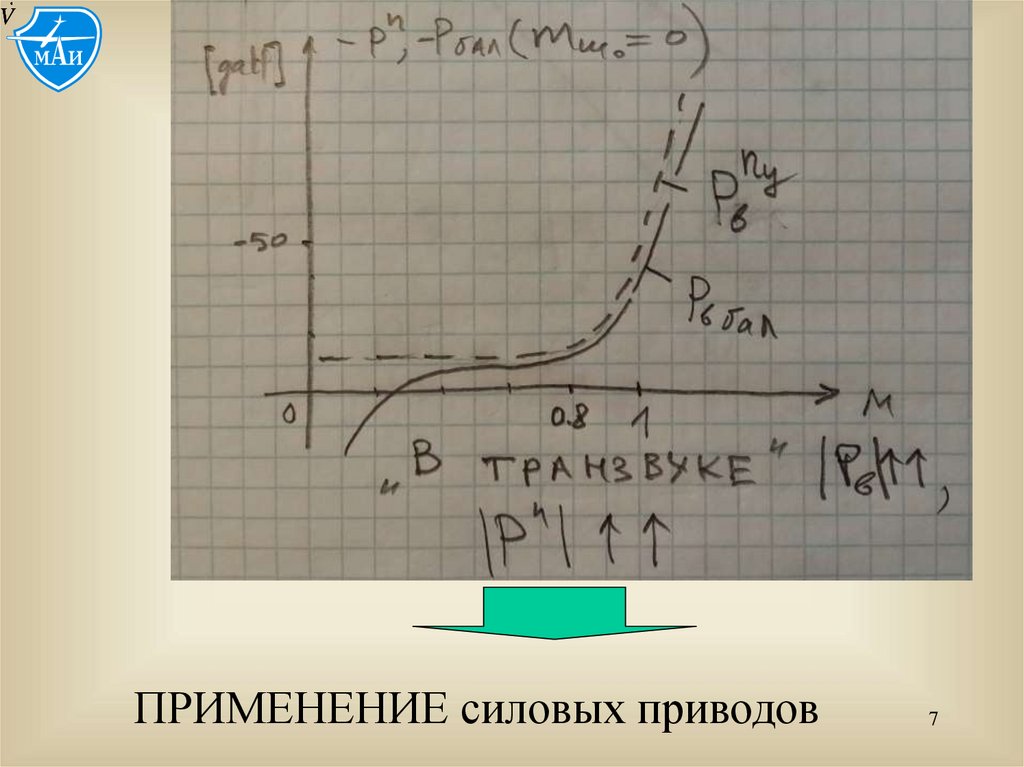
7.
VПРИМЕНЕНИЕ силовых приводов
7
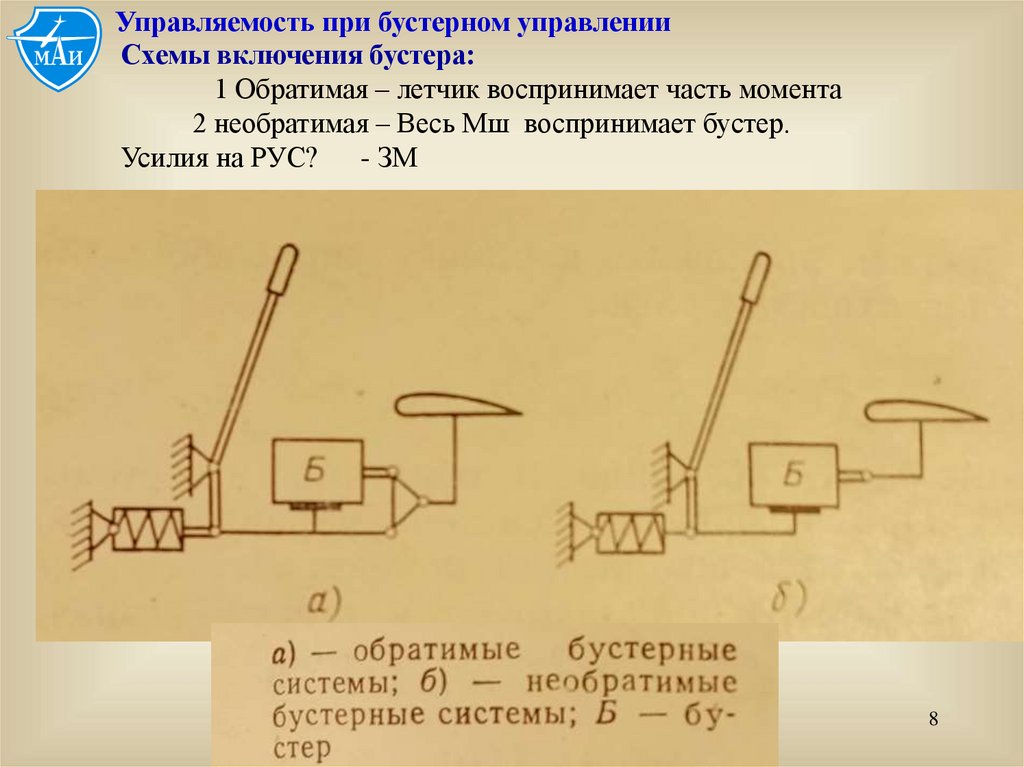
8.
Управляемость при бустерном управленииСхемы включения бустера:
1 Обратимая – летчик воспринимает часть момента
2 необратимая – Весь Мш воспринимает бустер.
Усилия на РУС? - ЗМ
8
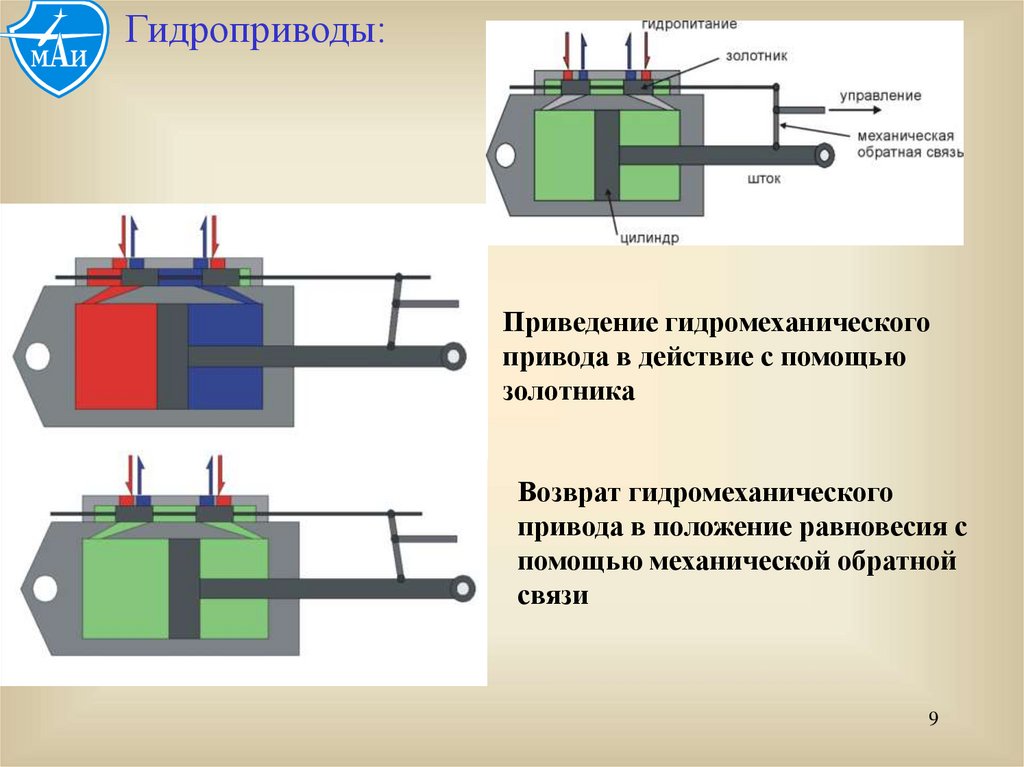
9.
Гидроприводы:Приведение гидромеханического
привода в действие с помощью
золотника
Возврат гидромеханического
привода в положение равновесия с
помощью механической обратной
связи
9
10.
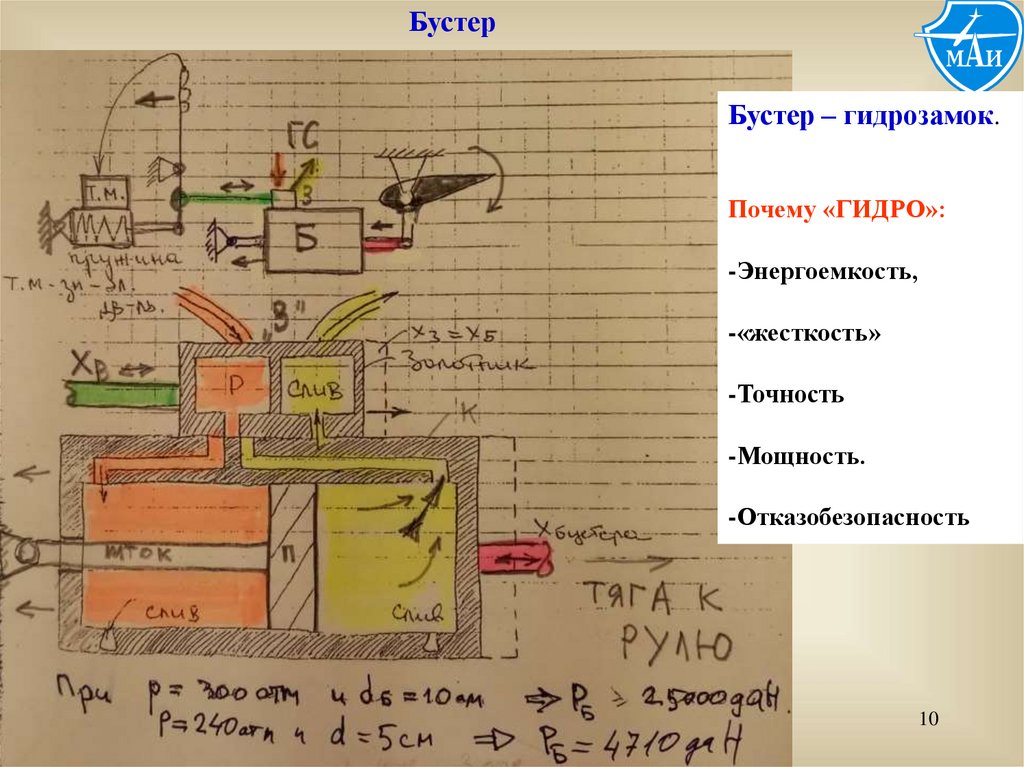
БустерБустер – гидрозамок.
Почему «ГИДРО»:
-Энергоемкость,
-«жесткость»
-Точность
-Мощность.
-Отказобезопасность
10
11.
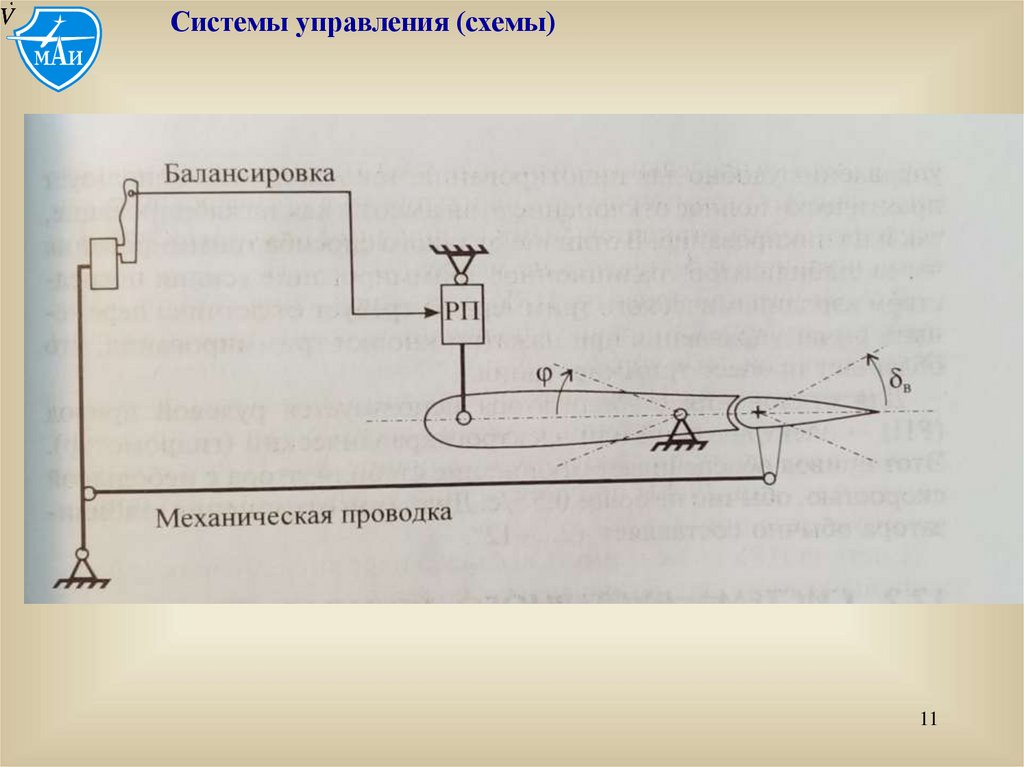
VСистемы управления (схемы)
11
12.
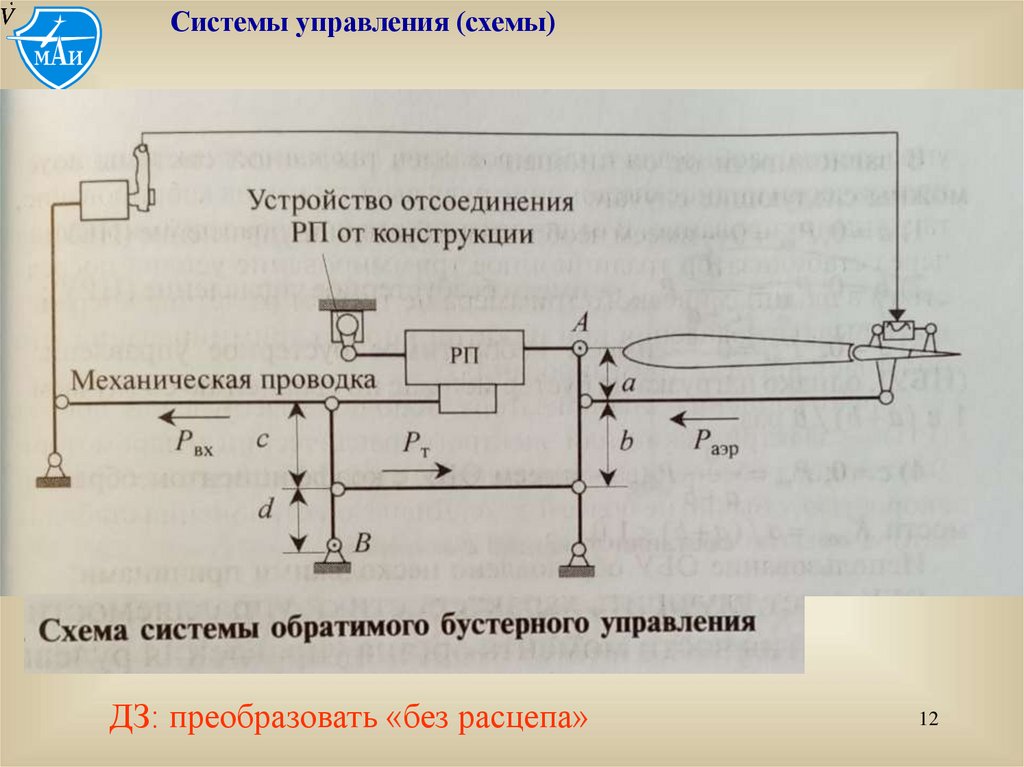
VСистемы управления (схемы)
ДЗ: преобразовать «без расцепа»
12
13.
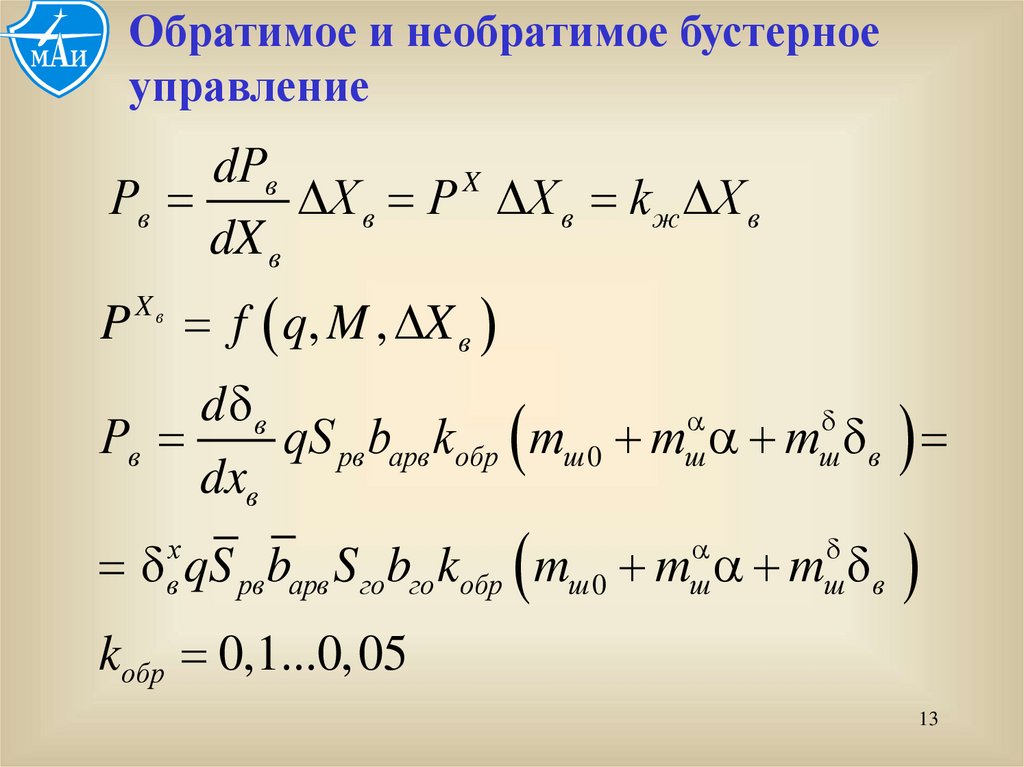
Обратимое и необратимое бустерноеуправление
dРв
X
Рв
X в P X в kж X в
dX в
P
f q, M , X в
Xв
d в
Рв
qS рв bарв kобр mш 0 mш mш в
dxв
qS рв bарв S гоbго kобр mш 0 m m
х
в
ш
ш в
kобр 0,1...0, 05
13
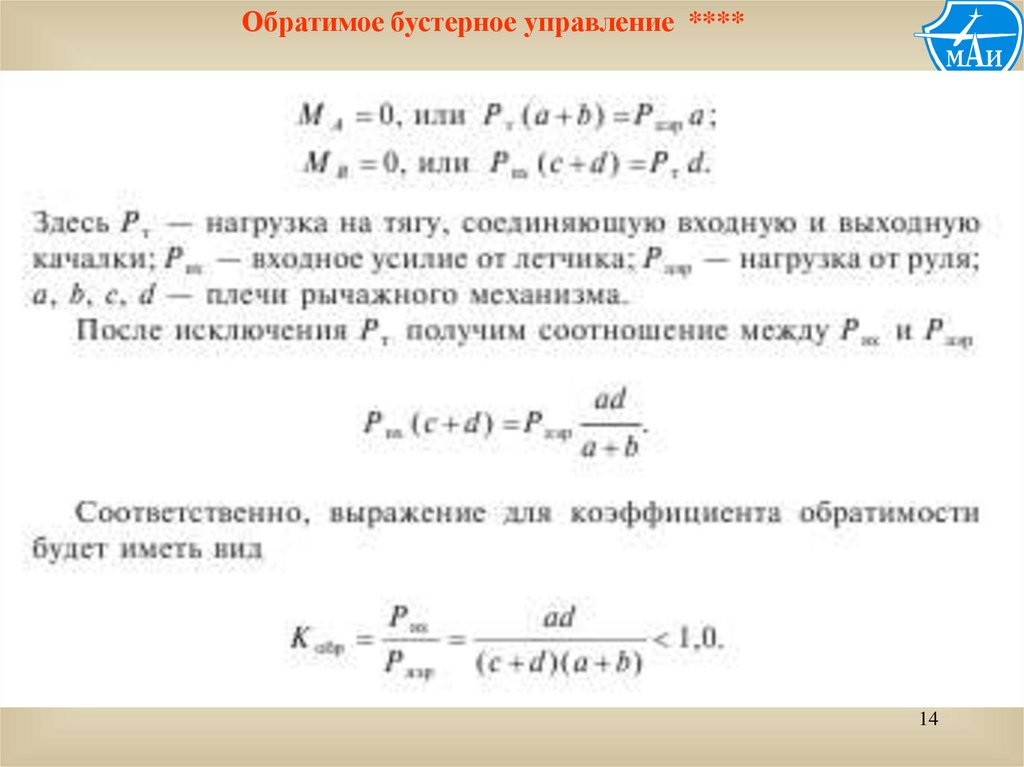
14.
Обратимое бустерное управление ****14
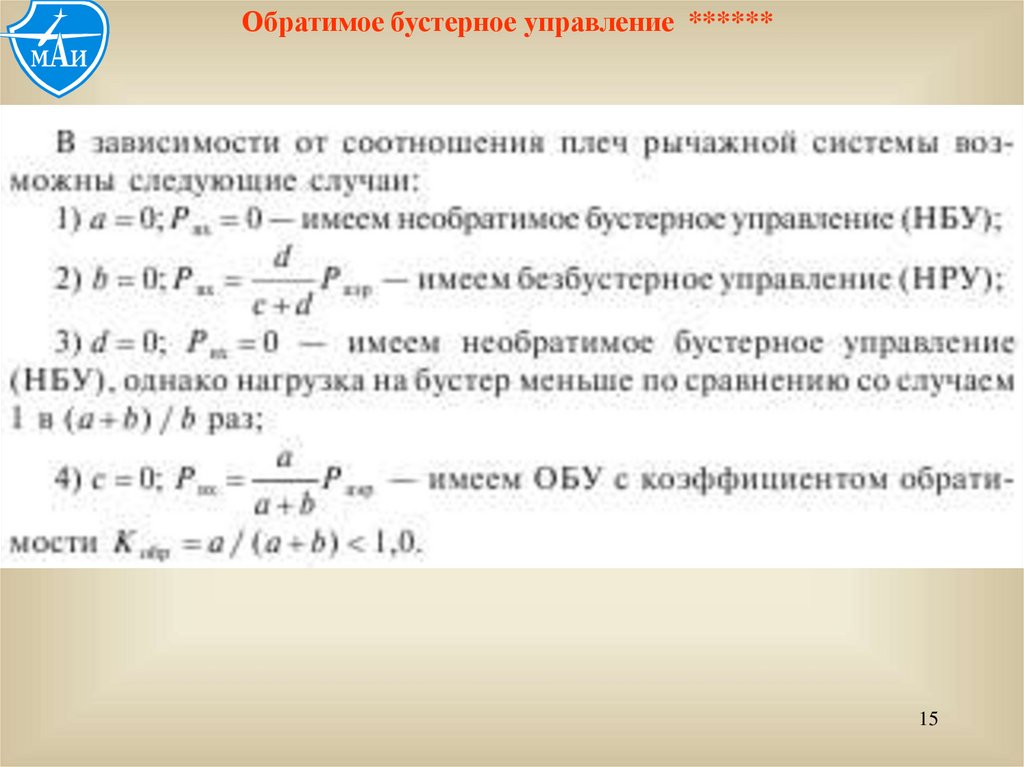
15.
Обратимое бустерное управление ******15
16.
Обратимое бустерное управлениеИспользование ОБУ было обусловлено несколькими причинами:
ОБУ позволяет улучшить характеристики управляемости по усилиям за счет снятия
части момента органа управления рулевым приводом;
наличие возможности перехода на непосредственно ручное управление гарантирует
безопасное завершение полета в случае отказа бустеров, особенно это было важно
на этапе создания бустерного управления, когда отсутствовал опыт применения
подобных систем на самолетах;
для ОБУ не требуется разработка специального высоконадежного
загрузочного устройства, необходимого для НБУ.
16
17.
Обратимое бустерное управлениеК особенностям ОБУ следует отнести:
при ОБУ сохраняется характер изменения усилий на рычагах управления от М шаэр ,
только эти усилия уменьшаются в К обр раз;
большие коэффициенты К обр использовать нельзя, так как в случае отказа рулевого
привода (например, падение давления в гидросистеме) летчику будет очень сложно
адаптироваться к большим М шаэр . Обычно К обр выбирается близким к 1/3;
скорость отклонения органа управления в ОБУ ограничивается скоростью
перемещения штока рулевого привода.
Меры безопасности при возможных отказах в ОБУ основываются на том положении, что основной вклад в
обеспечение безопасности самолета с ОБУ вносит система непосредственного ручного управления, на которую
должен осуществляться переход с ОБУ в случае его отказа.
17
18.
Необратимое бустерное управление18
19.
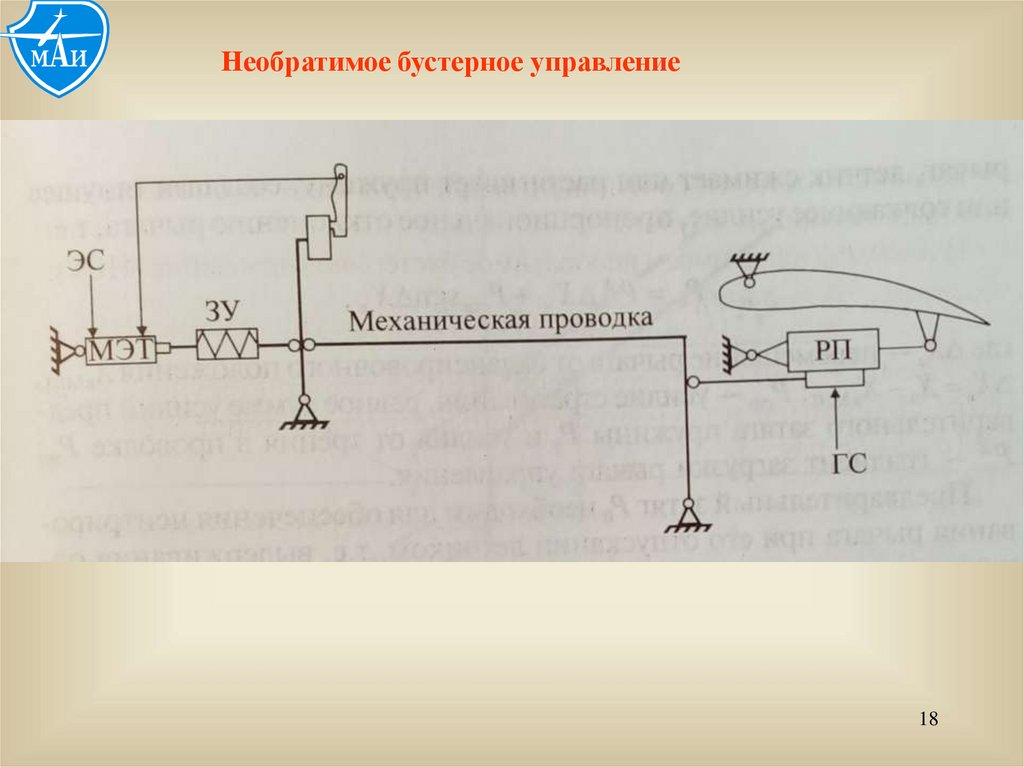
Необратимое бустерное управлениеВместе с рычагами управления и механической
проводкой основными элементами НБУ являются:
рулевой привод (РП),
загрузочное устройство с механизмом эффекта
триммирования (МЭТ) и
системы гидравлического и электрического питания.
Все эти устройства должны иметь очень
высокую надежность, что достигается применением
многократного резервирования, при котором
вероятность полного отказа НБУ может быть
отнесена к практически невероятным событиям.
19
20.
Необратимое бустерное управлениеДля НБУ характерны следующие особенности:
усилия управления в НБУ определяются
характеристиками системы искусственной загрузки рычагов
управления независимо от величины . Усилия на рычагах
управления могут быть сделаны такими, какие необходимы
для обеспечения управляемости и безопасности полета;
в НБУ могут быть включены различные
автоматические устройства для улучшения характеристик
устойчивости и управляемости;
механическая проводка управления от рычага до
золотников привода может быть сделана более легкой,
поскольку она рассчитывается на меньший уровень усилий.
20
21.
Необратимое бустерное управлениеПоскольку в системах необратимого
бустерного управления шарнирный момент руля
полностью преодолевается приводом для создания
усилий на рычаге управления применяются
специальные загрузочные устройства. Загрузочное
устройство (ЗУ) предназначено для создания летчику
приемлемых характеристик управляемости самолета
по усилиям во всем диапазоне режимов полета. Они
могут быть различной степени сложности в
зависимости от особенностей структуры системы
управления и требований, предъявляемых к
самолету.
21
22.
Необратимое бустерное управлениеНаиболее простое загрузочное устройство
представляет собой пружину с предварительным
затягом, присоединенную к рычагу управления.
Отклоняя рычаг, летчик сжимает или растягивает
пружину, создавая тянущее или толкающее усилия,
пропорциональные величине отклонения рычага
Pв P X в Pстр sign X в
x
22
23.
2324.
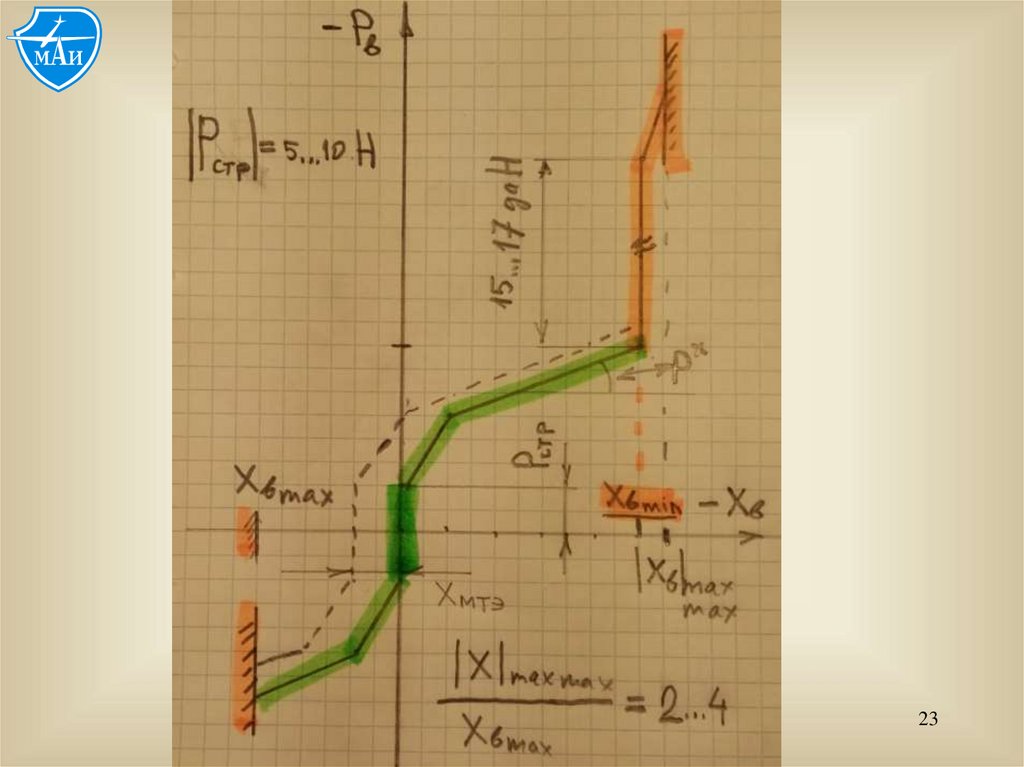
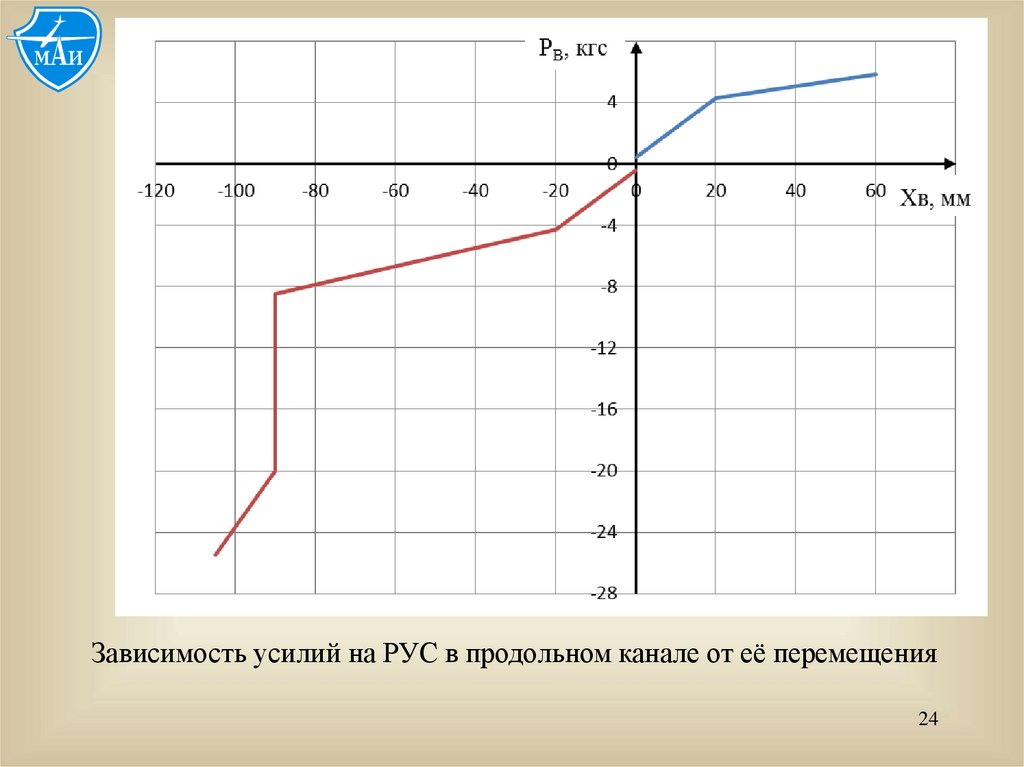
Зависимость усилий на РУС в продольном канале от её перемещения24
25.
Необратимое бустерное управлениеPв P X в Pстр sign X в
x
Хв = Хв - Хв МЭТ – перемещение рычага от
балансировочного положения Хв МЭТ;
Рстр – усилие страгивания, равное сумме усилий
предварительного затяга пружины Р0 и усилия от трения в
проводке Ртр;
Рх – градиент загрузки рычага управления.
Предварительный затяг Р0 необходим для обеспечения
центрирования рычага при отпускании рычага летчиком, т.е.
выдерживания однозначного соответствия положения рычага
при нулевом усилии. При отсутствии предварительного затяга
(Р0 = 0) наличие трения в проводке (Ртр,) приводит к
различным положениям рычага при нулевом усилии.
25
26.
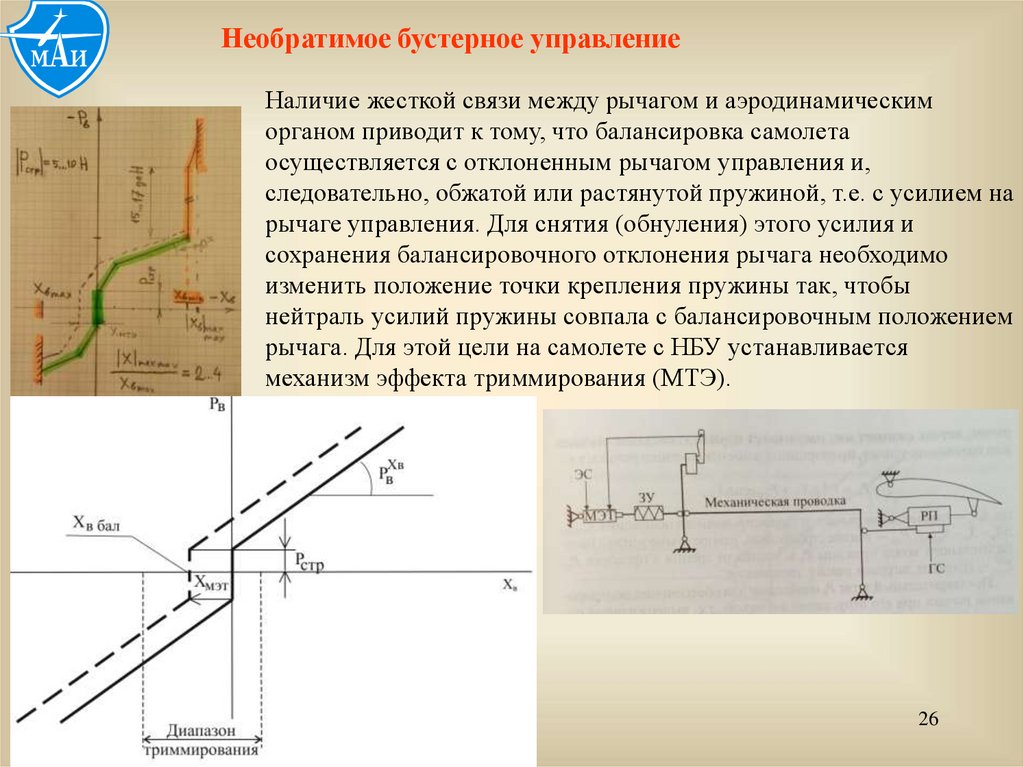
Необратимое бустерное управлениеНаличие жесткой связи между рычагом и аэродинамическим
органом приводит к тому, что балансировка самолета
осуществляется с отклоненным рычагом управления и,
следовательно, обжатой или растянутой пружиной, т.е. с усилием на
рычаге управления. Для снятия (обнуления) этого усилия и
сохранения балансировочного отклонения рычага необходимо
изменить положение точки крепления пружины так, чтобы
нейтраль усилий пружины совпала с балансировочным положением
рычага. Для этой цели на самолете с НБУ устанавливается
механизм эффекта триммирования (МТЭ).
26
27.
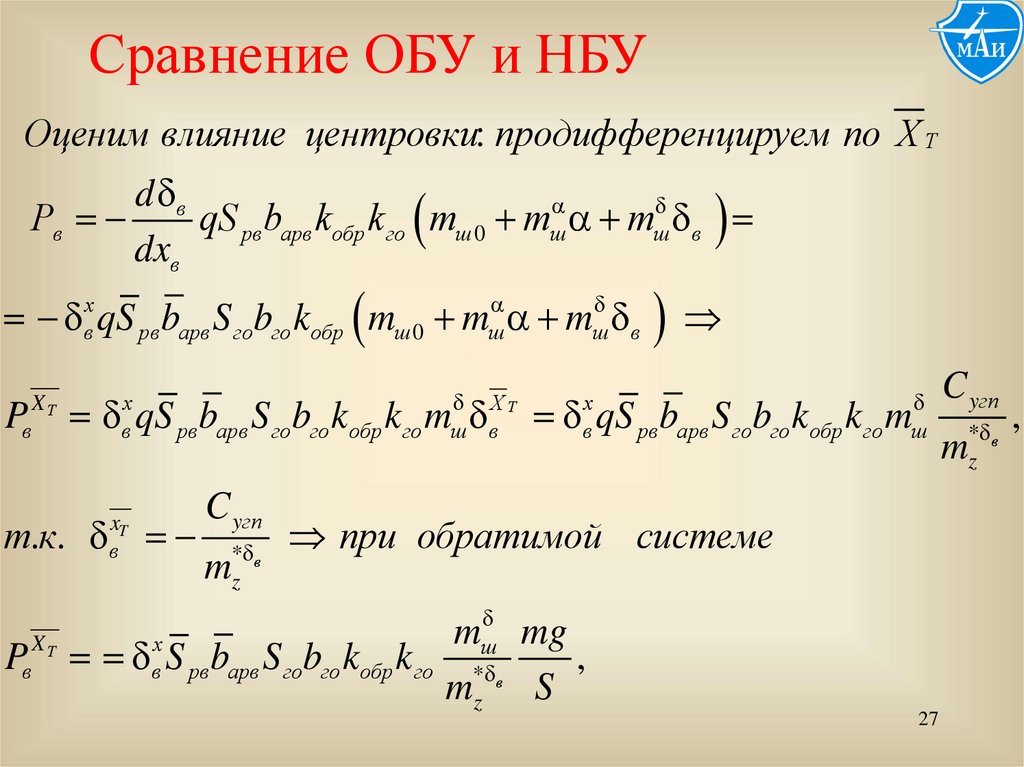
Сравнение ОБУ и НБУОценим влияние центровки: продифференцируем по X Т
d в
Рв
qS рв bарв kобр k го mш 0 mш mш в
dxв
qS рв bарв S гоbго kобр mш 0 m m
ш
х
в
XТ
ш в
Pв qS рв bарв S гоbго kобр kго m
XТ
х
в
т.к.
xT
в
Pв
XТ
C yгп
* в
z
m
ш в
ш
qS рв bарв S гоbго kобр kго m
х
в
при обратимой системе
ш
* в
z
m mg
S рв bарв S гоbго kобр k го
,
m
S
х
в
27
C yгп
m
* в
z
,
28.
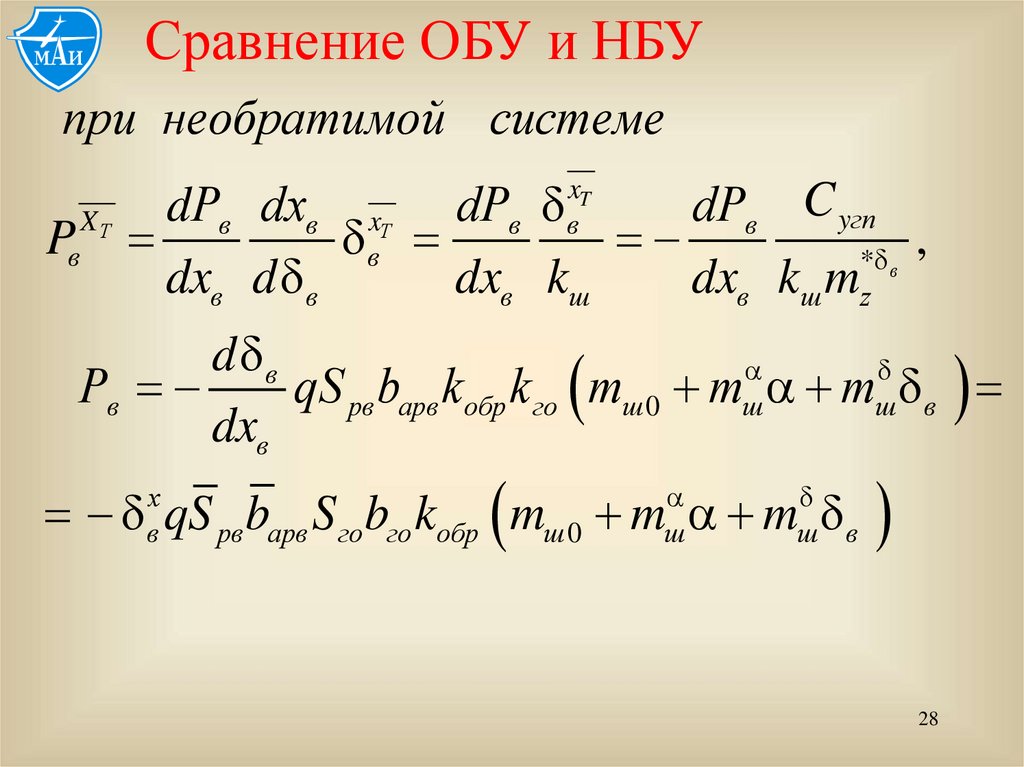
Сравнение ОБУ и НБУпри необратимой системе
Pв
XТ
dРв dxв xT dРв
dРв C yгп
в
,
* в
dxв d в
dxв kш
dxв kш mz
xT
в
d в
Рв
qS рв bарв kобр k го mш 0 mш mш в
dxв
вх qS рв bарв S гоbго kобр mш 0 mш mш в
28
29.
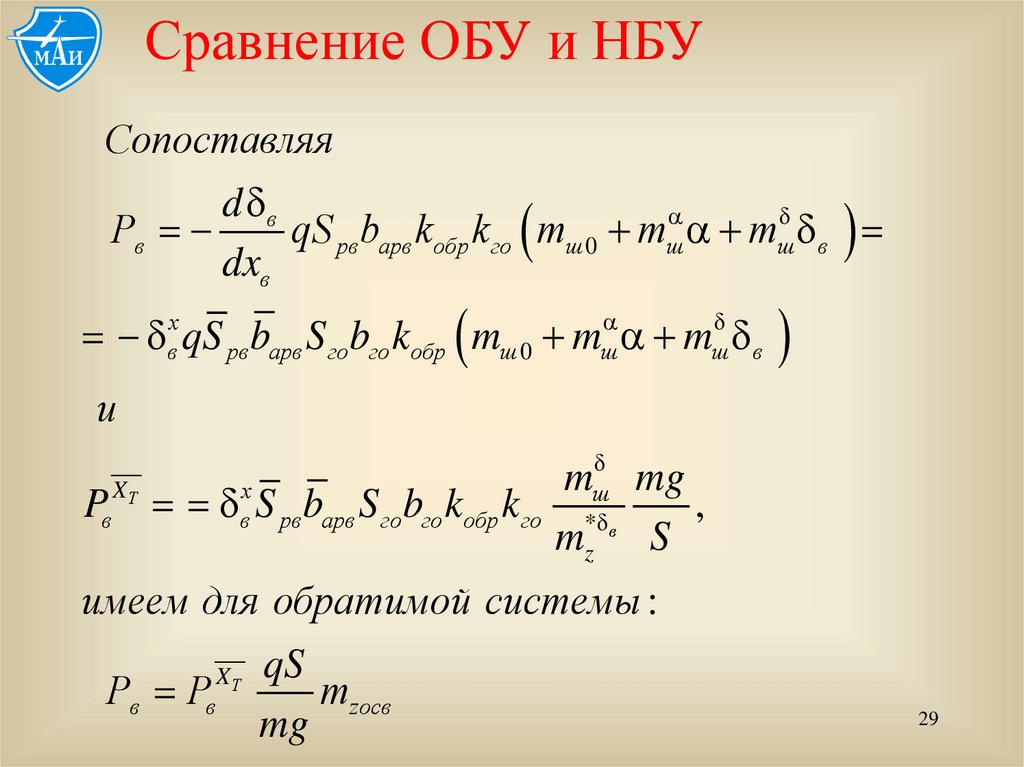
Сравнение ОБУ и НБУСопоставляя
d в
Рв
qS рв bарв kобр k го mш 0 mш mш в
dxв
вх qS рв bарв S гоbго kобр mш 0 mш mш в
и
Pв
XТ
ш
* в
z
m mg
S рв bарв S гоbго kобр kго
,
m
S
х
в
имеем для обратимой системы :
Рв Pв
XТ
qS
mzосв
mg
29
30.
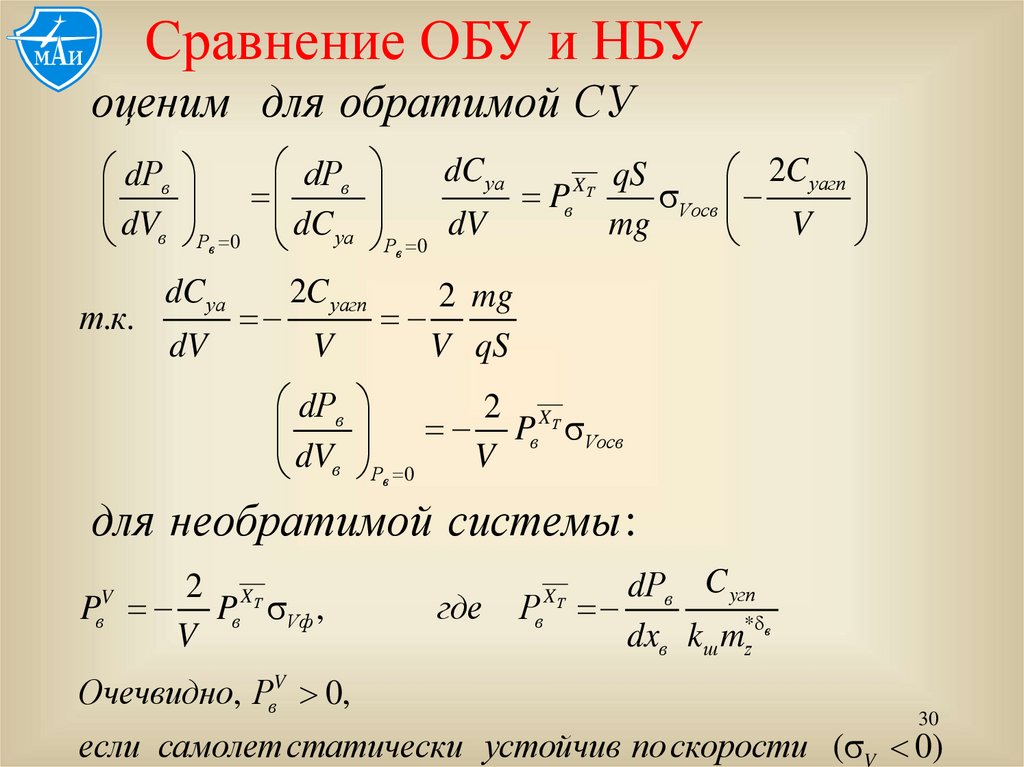
Сравнение ОБУ и НБУоценим для обратимой СУ
dРв
dC уa
dРв
2C уaгп
X Т qS
Pв
Vосв
dV
dC
dV
mg
V
в Рв 0 уa Рв 0
т.к.
dC уa
dV
2C уaгп
V
2 mg
V qS
dРв
2 XТ
Pв Vосв
V
dVв Рв 0
для необратимой системы :
2 XТ
P Pв Vф ,
V
V
в
Очечвидно, PвV 0,
где
Pв
XТ
dРв C yгп
dxв kш m*z в
30
если самолет статически устойчив по скорости ( V 0)
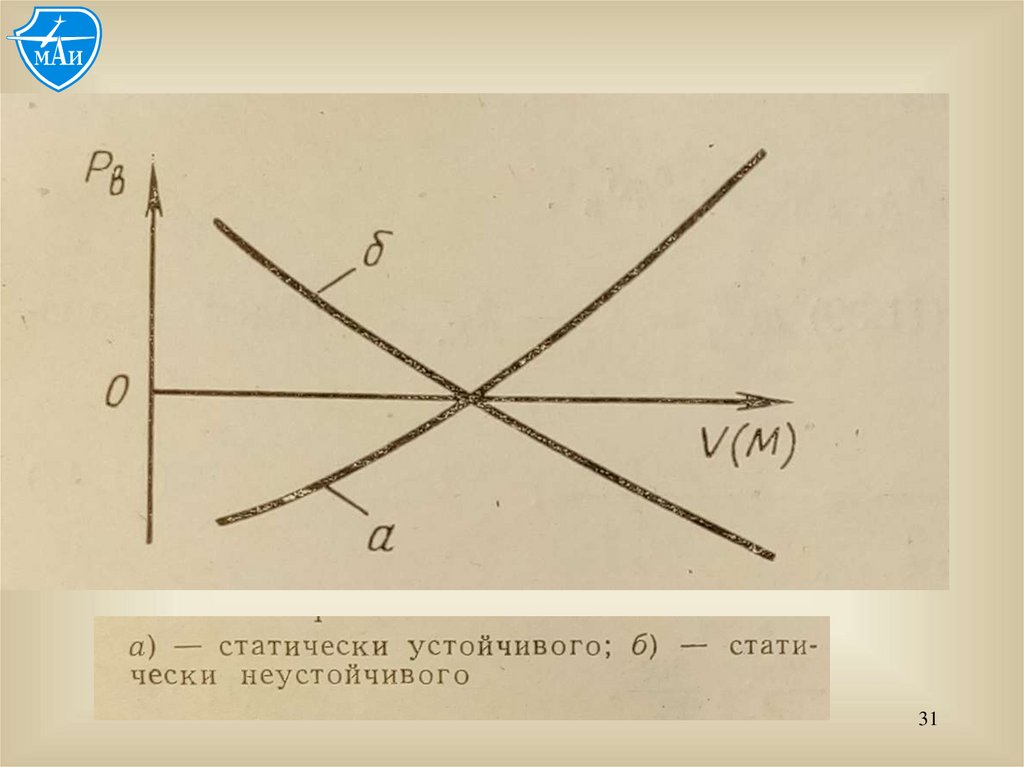
31.
3132.
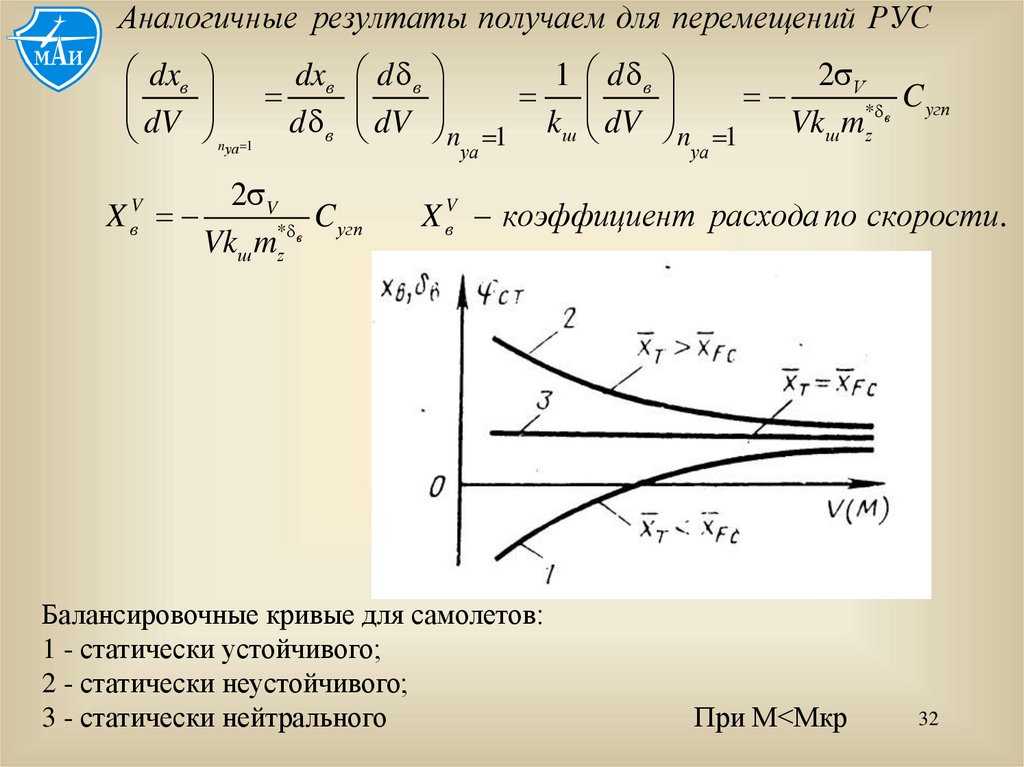
Аналогичные резултаты получаем для перемещений РУСdxв
dxв d в
2 V
1 d в
C yгп
* в
Vkш mz
dV nуa 1 d в dV n 1 kш dV n 1
уa
X вV
2 V
C yгп
* в
Vkш mz
уa
X вV коэффициент расхода по скорости.
Балансировочные кривые для самолетов:
1 - статически устойчивого;
2 - статически неустойчивого;
3 - статически нейтрального
При М<Мкр
32
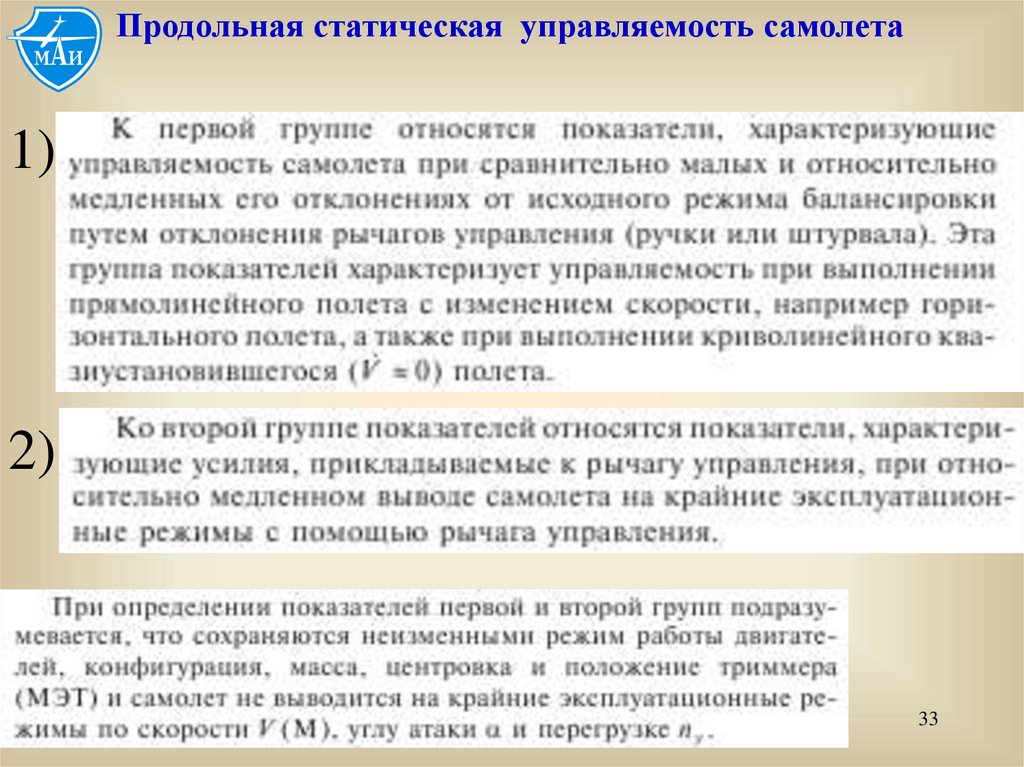
33.
Продольная статическая управляемость самолета1)
2)
33
34.
3)1)
Например,
dxв
nу
nу
X в , Рв , ..............и т.п.
dn у
34
35.
Обратимые системы упрвавления:35
36.
3637.
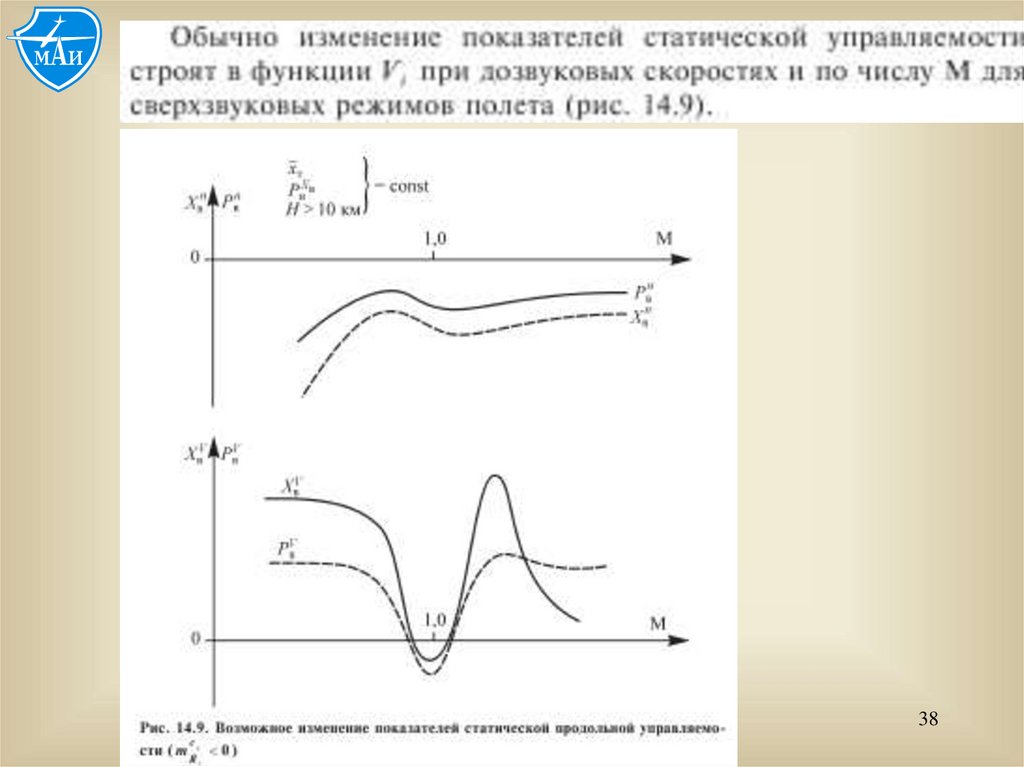
3738.
3839.
3940.
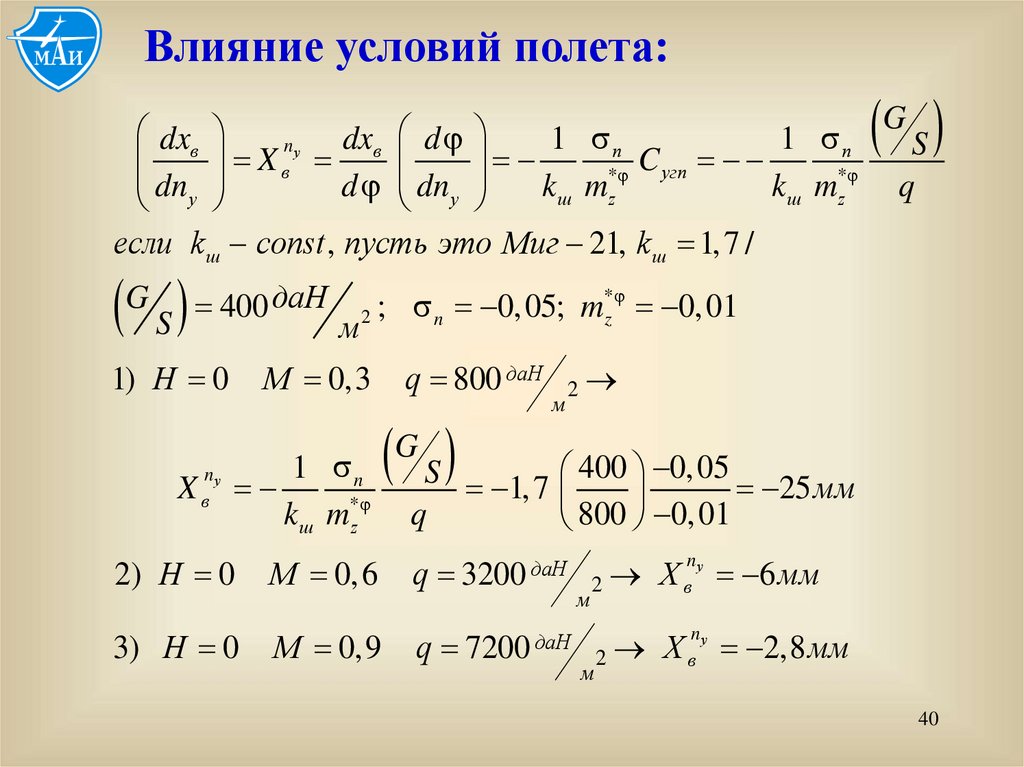
Влияние условий полета:G
dxв
dxв d
1 n
1 n
nу
S
C
X в
yгп
*
*
dn
d
dn
k
m
k
m
q
ш
z
ш
z
у
у
если kш const , пусть это Миг 21, kш 1, 7 /
G S 400 даН м ; 0, 05; m 0, 01
2
1) Н 0
М 0,3
1 n
nу
Xв
kш m*z
*
z
n
q 800 даН
м
2
G S 1, 7 400 0, 05 25 мм
q
800 0, 01
2) Н 0
М 0, 6
q 3200 даН
3) Н 0
М 0,9
q 7200 даН
у
2 X в 6 мм
n
м
у
2 X в 2,8 мм
n
м
40
41.
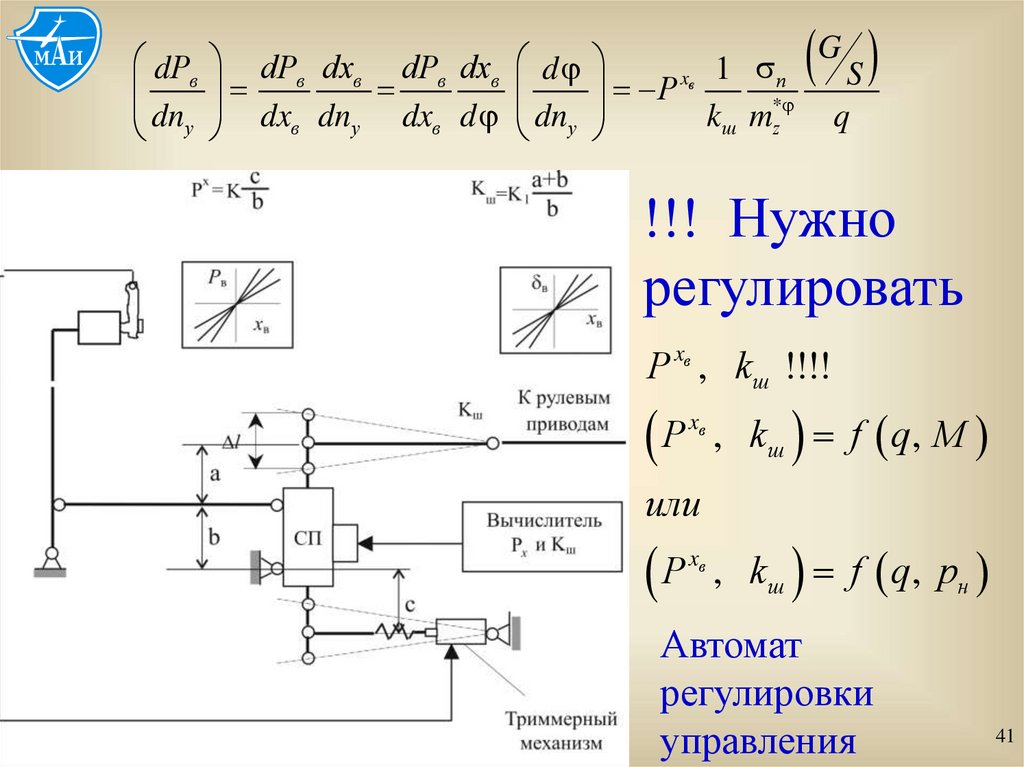
GdРв dРв dxв dРв dxв d
S
xв 1 n
Р
*
dn
dx
dn
dx
d
dn
k
m
q
в
у
в
ш
z
у
у
!!! Нужно
регулировать
Р xв , kш !!!!
Р xв , kш f q, М
или
Р xв , kш f q, pн
Автомат
регулировки
управления
41
42.
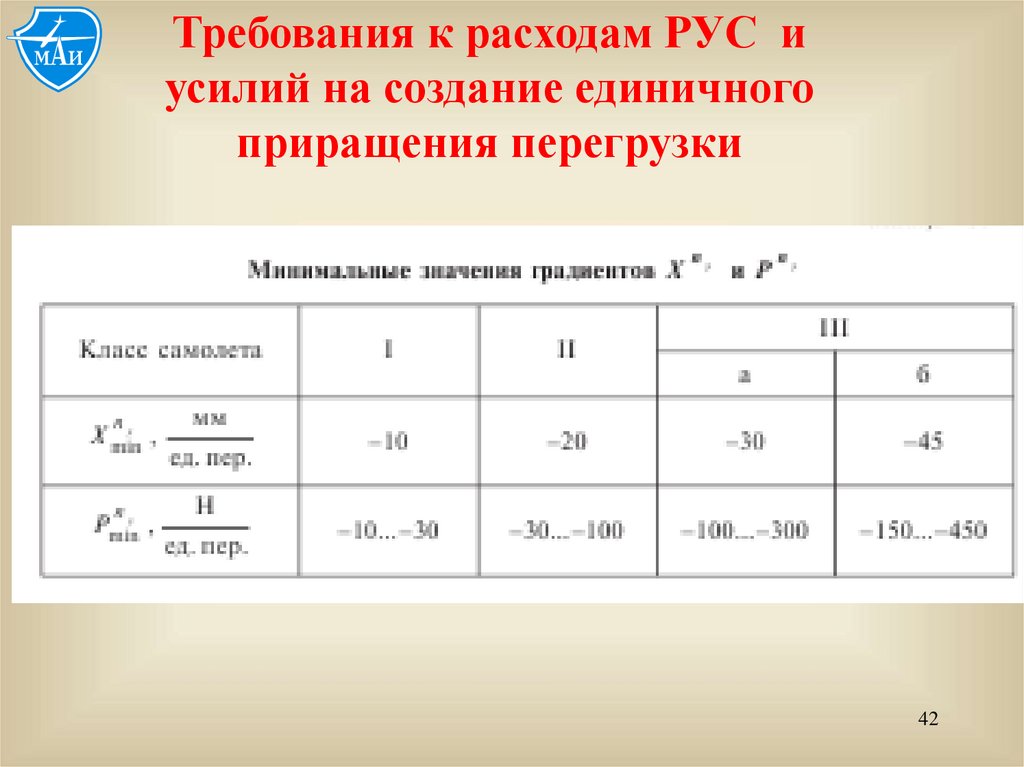
Требования к расходам РУС иусилий на создание единичного
приращения перегрузки
42
43.
СРССист. упр –
самоподготовка:с.4
53-478 ДП МАИ
43
44.
4445.
4546.
4647.
4748.
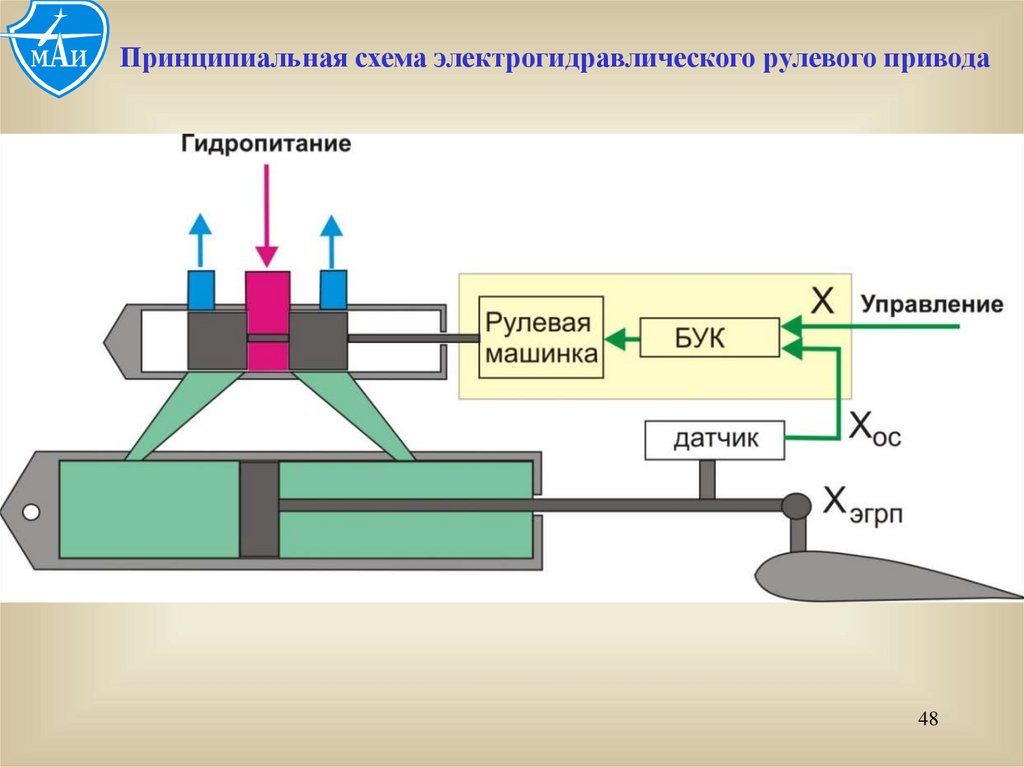
Принципиальная схема электрогидравлического рулевого привода48
49.
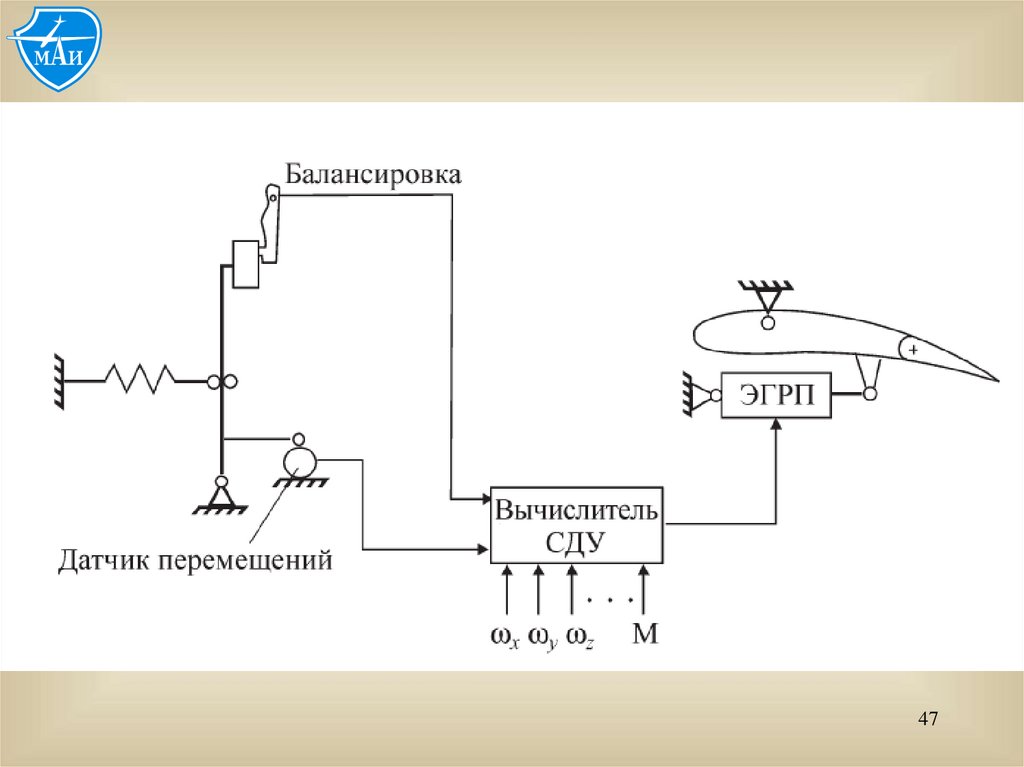
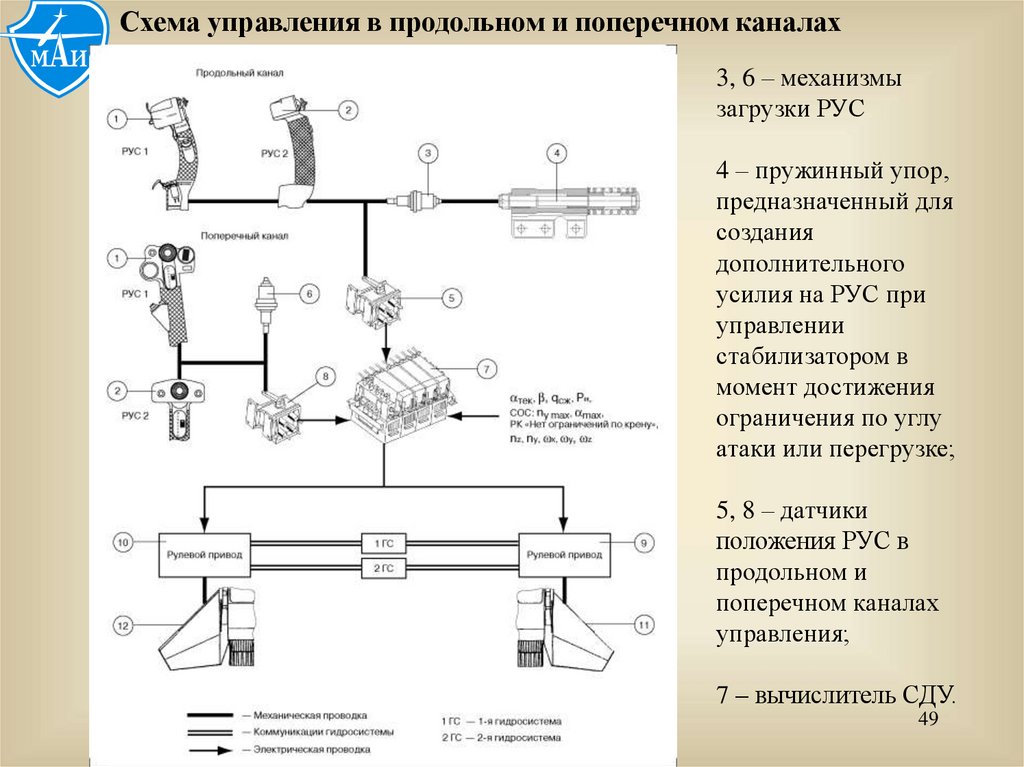
Схема управления в продольном и поперечном каналах3, 6 – механизмы
загрузки РУС
4 – пружинный упор,
предназначенный для
создания
дополнительного
усилия на РУС при
управлении
стабилизатором в
момент достижения
ограничения по углу
атаки или перегрузке;
5, 8 – датчики
положения РУС в
продольном и
поперечном каналах
управления;
7 – вычислитель СДУ.
49
50.
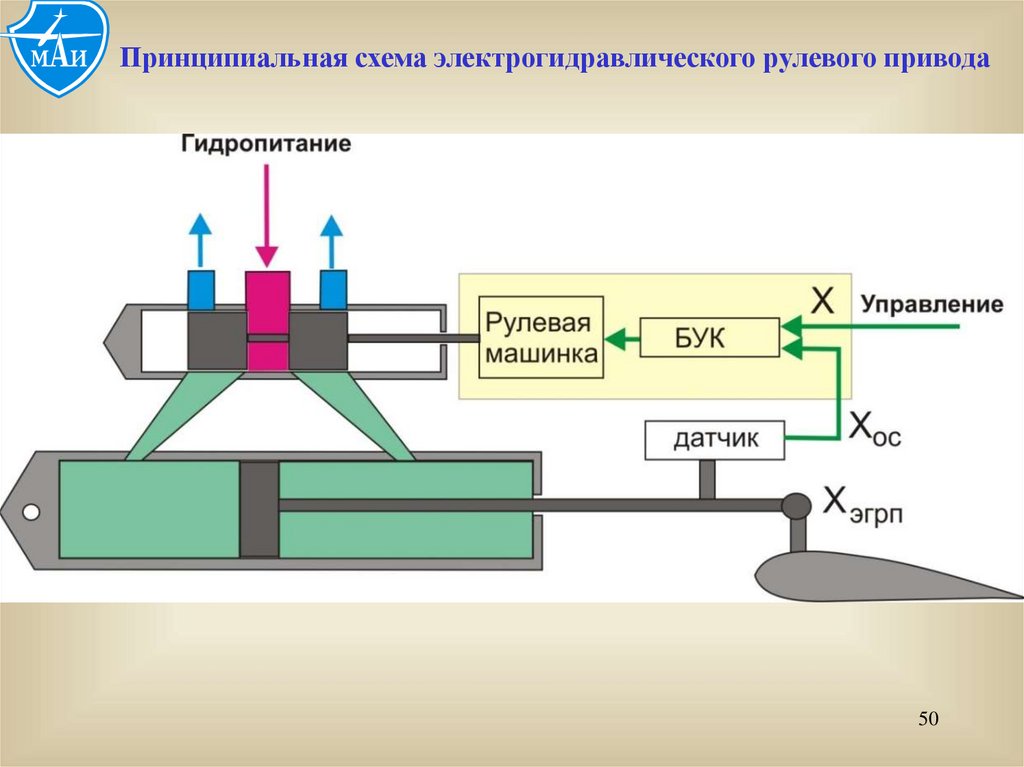
Принципиальная схема электрогидравлического рулевого привода50
51.
Особенности балансировки на больших углах атакиУглы атаки, при которых возникает срыв потока на несущих поверхностях
самолета и, как следствие, ухудшаются его аэродинамические характеристики
принято считать большими углами атаки.
Ухудшение характеристик устойчивости и управляемости, увеличение нагрузки
на летчика при пилотировании на больших углах атаки допускается в
определенных пределах. Аэродинамические характеристики самолета,
позволяющие летчику уверенно пилотировать и обеспечивающие при этом
приемлемую психофизиологическую нагрузку, определяют границу
эксплуатационных углов атаки, то есть определяют допустимый угол атаки –
наибольший разрешенный в эксплуатации (αдоп). Углы атаки, близкие к
допустимому, являются большими.
На больших углах атаки вплоть до допустимого не должно быть
самопроизвольного колебательного или апериодического движения
непереносимой по амплитуде и частоте аэродинамической тряски, затрудняющей
пилотирование. На допустимом угле атаки должны быть обеспечены: запас не
менее 40 до углов начала сваливания, естественные или искусственные признаки,
сигнализирующие о выходе на αдоп. Естественным признаком может являться
тряска (конструкции) самолета .
51
52.
5253.
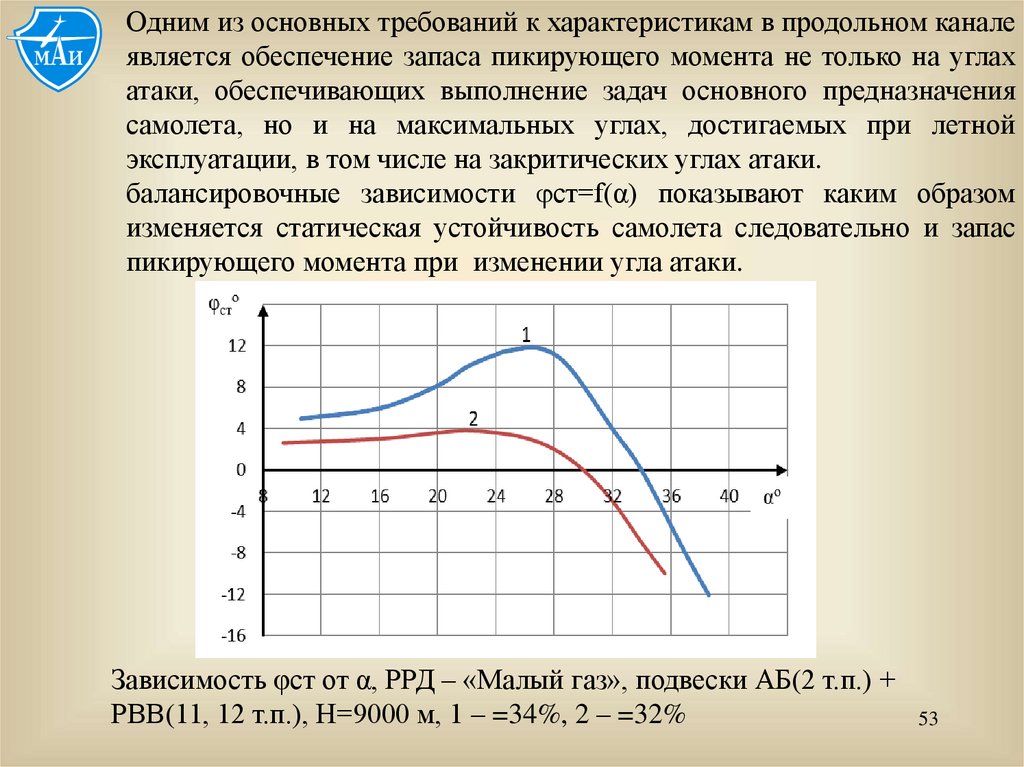
Одним из основных требований к характеристикам в продольном каналеявляется обеспечение запаса пикирующего момента не только на углах
атаки, обеспечивающих выполнение задач основного предназначения
самолета, но и на максимальных углах, достигаемых при летной
эксплуатации, в том числе на закритических углах атаки.
балансировочные зависимости ст=f(α) показывают каким образом
изменяется статическая устойчивость самолета следовательно и запас
пикирующего момента при изменении угла атаки.
Зависимость φст от α, РРД – «Малый газ», подвески АБ(2 т.п.) +
РВВ(11, 12 т.п.), Н=9000 м, 1 – =34%, 2 – =32%
53
54.
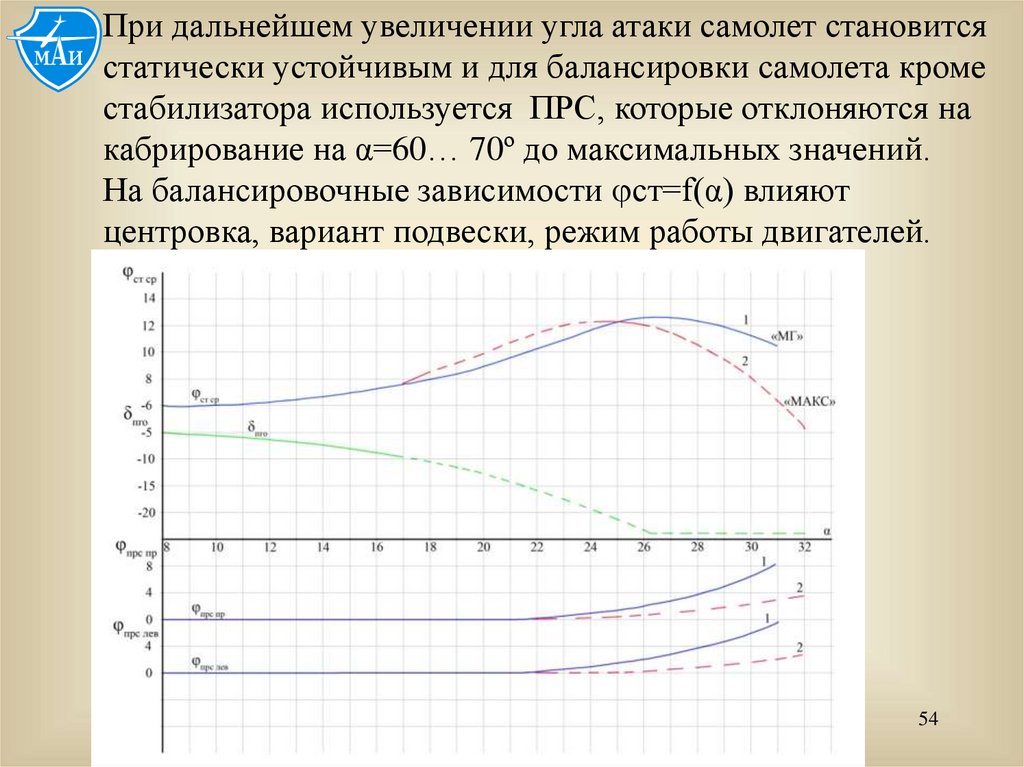
При дальнейшем увеличении угла атаки самолет становитсястатически устойчивым и для балансировки самолета кроме
стабилизатора используется ПРС, которые отклоняются на
кабрирование на α=60… 70º до максимальных значений.
На балансировочные зависимости ст=f(α) влияют
центровка, вариант подвески, режим работы двигателей.
54
55.
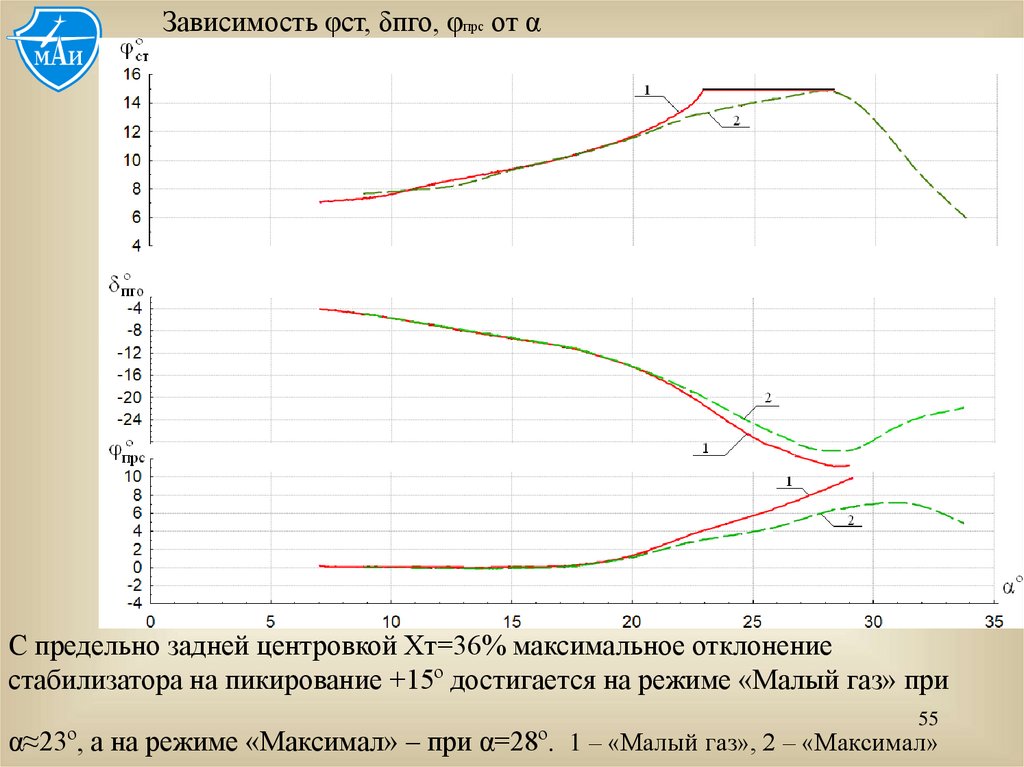
Зависимость φст, δпго, φпрс от αС предельно задней центровкой Хт=36% максимальное отклонение
стабилизатора на пикирование +15º достигается на режиме «Малый газ» при
55
α≈23º, а на режиме «Максимал» – при α=28º. 1 – «Малый газ», 2 – «Максимал»
56.
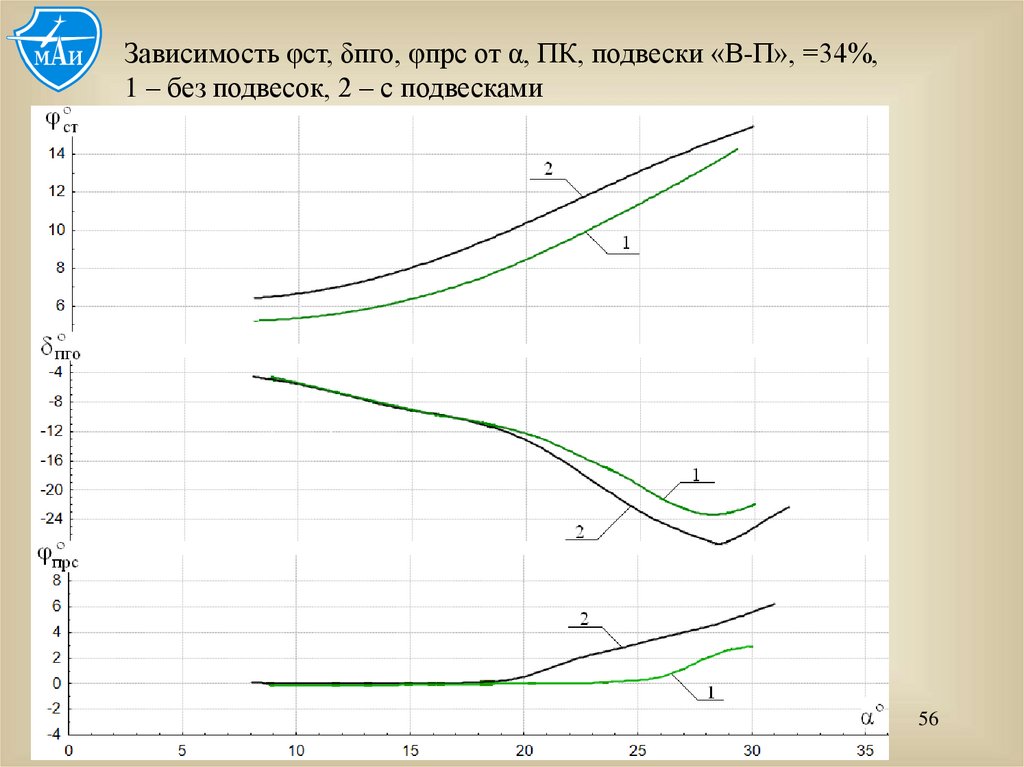
Зависимость φст, δпго, φпрс от α, ПК, подвески «В-П», =34%,1 – без подвесок, 2 – с подвесками
56
57.
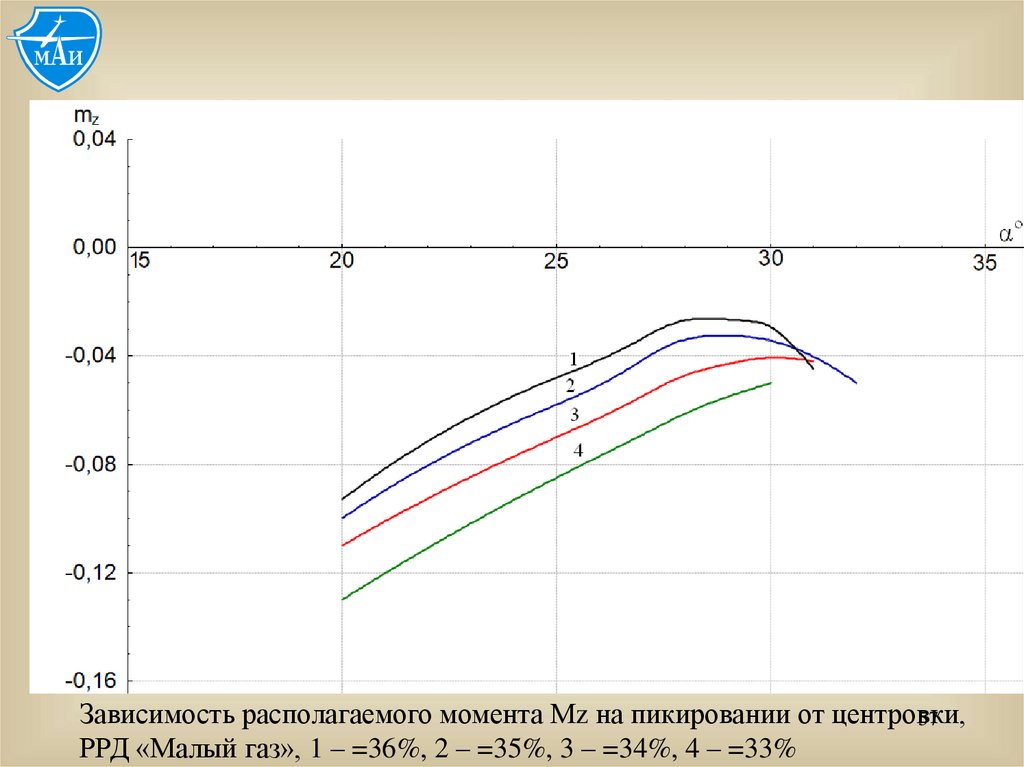
Зависимость располагаемого момента Мz на пикировании от центровки,57
РРД «Малый газ», 1 – =36%, 2 – =35%, 3 – =34%, 4 – =33%
58.
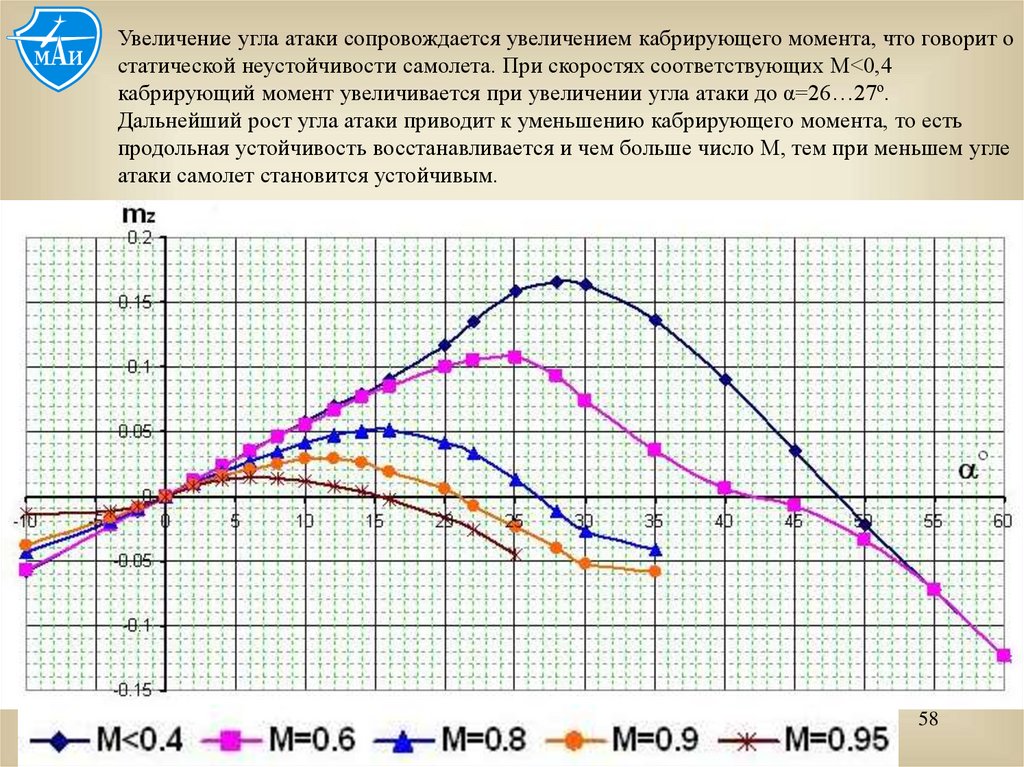
Увеличение угла атаки сопровождается увеличением кабрирующего момента, что говорит остатической неустойчивости самолета. При скоростях соответствующих М<0,4
кабрирующий момент увеличивается при увеличении угла атаки до α=26…27º.
Дальнейший рост угла атаки приводит к уменьшению кабрирующего момента, то есть
продольная устойчивость восстанавливается и чем больше число М, тем при меньшем угле
атаки самолет становится устойчивым.
58
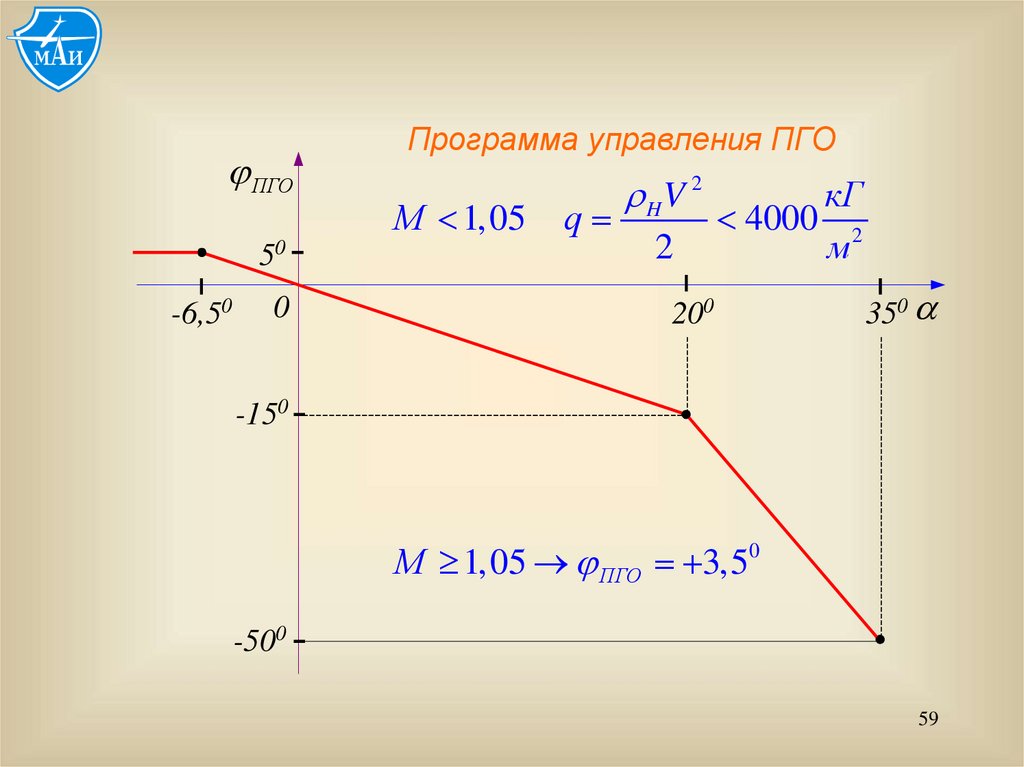
59.
ПГО-6,50
Программа управления ПГО
М 1,05
q
HV 2
50
2
0
200
кГ
4000 2
м
350
-150
М 1,05 ПГО 3,50
-500
59