





 mathematics
mathematicsSimilar presentations:










Свойства определителей. § 5
1.
§ 5. Свойства определителейТранспонированием определителя называют замену каждой его
строки столбцом с тем же номером.
1. Определитель не изменится при транспонировании.
a11 a12 a13 a11 a 21 a31
Пример. a21 a22 a 23 a12 a22 a32 .
a31 a32 a33 a13 a23 a33
Из этого свойства вытекает, что каждое утверждение о строках
определителя справедливо и для его столбцов и наоборот. Другими
словами, строки и столбцы равноправны. Поэтому далее свойства
определителей будут формулироваться только для строк.
2. При перестановке двух строк определитель меняет знак.
3. Определитель, имеющий две равные строки, равен нулю.
4. Общий множитель элементов строки можно вынести за знак
определителя.
5. Определитель, имеющий нулевую строку, равен нулю.
6. Определитель, две строки которого пропорциональны, равен
нулю.
2.
7. Если элементы какой-либо строки определителя представляют собойсуммы двух слагаемых, то определитель может быть разложен на сумму
двух соответствующих определителей.
b c b c
b b
c c
Пример. 11 11 12 12 11 12 11 12 .
a21
a22 a21 a22 a21 a22
8. Определитель не изменится, если к элементам одной строки
прибавить соответствующие элементы другой строки, умноженные на
одно и то же число.
a a
a a21 a12 a22
Пример. 11 12 11
, – число.
a21 a22
a21
a22
Минором Mij элемента aij определителя A называют определитель,
полученный из определителя A вычеркиванием строки и столбца, на
пересечении которых стоит элемент aij.
4
2
3
1
1.
Пример. A 7
2
5
8
В данном случае a31 2, M 31 2 3 .
11
3.
Алгебраическим дополнением Aij элемента aij определителя Aназывают число
Aij ( 1) i j M ij .
1
Пример. A 5
2
2
1
1
3
1.
4
2 1
В данном случае a21 5, M 21 2 3 11, A21 1 M 21 11.
1 4
9. Определитель равен сумме произведений элементов любой его
строки на их алгебраические дополнения.
a11 a12 a13
Пример. a21 a22 a23 a11 A11 a12 A12 a13 A13 .
a31 a32 a33
4.
12 3Пример. Вычислить определитель 1 2 4 с помощью разложения
0 2 5
по первому столбцу.
Так как в данном случае a31 0 , то a31 A31 0 – вычислять A31 не
надо. A11 2 4 2 , A21 2 3 4. Следовательно, имеем
2 5
25
12 3
1 2 4 1 2 ( 1) ( 4) 0 6.
0 2 5
Определители четвертого и более высокого порядка вычисляют
разложением по строке или столбцу, что понижает порядок
определителей и в конечном итоге сводит задачу к нахождению
определителей 3-го порядка.
5.
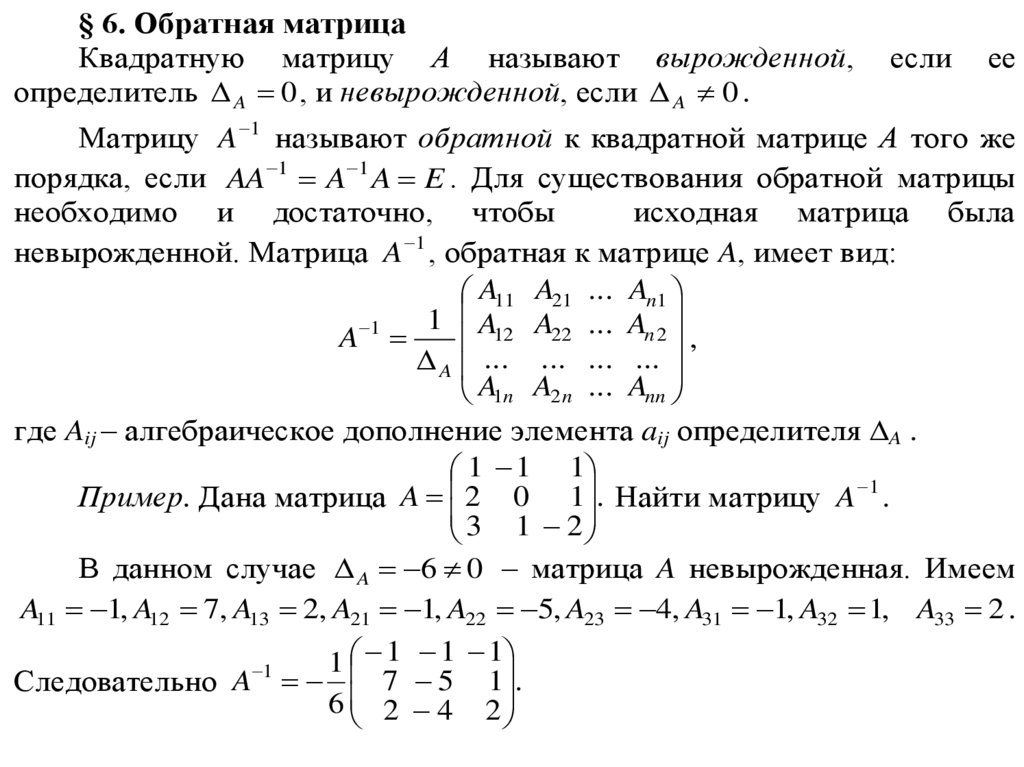
§ 6. Обратная матрицаКвадратную матрицу А называют вырожденной,
определитель A 0 , и невырожденной, если A 0 .
если
ее
Матрицу A 1 называют обратной к квадратной матрице А того же
порядка, если AA 1 A 1 A E . Для существования обратной матрицы
необходимо и достаточно, чтобы
исходная матрица была
невырожденной. Матрица A 1 , обратная к матрице A, имеет вид:
A11 A21 ... An1
1 A12 A22 ... An 2
1
A
,
...
...
...
...
A
A
A
...
A
nn
1n 2 n
где Aij – алгебраическое дополнение элемента aij определителя A .
1 1 1
Пример. Дана матрица A 2 0 1 . Найти матрицу A 1 .
3 1 2
В данном случае A 6 0 – матрица A невырожденная. Имеем
A11 1, A12 7, A13 2, A21 1, A22 5, A23 4, A31 1, A32 1, A33 2 .
1 1 1 1
1
7 5 1 .
Следовательно A
6 2 4 2
6.
§ 7. Системы линейных уравненийЛинейными операциями над какими-либо объектами называют
сложение этих объектов и умножение их на число.
Линейной комбинацией переменных x1 , x2 ,..., xn называют результат
применения к ним линейных операций, т.е. выражение
a1 x1 a2 x2 ... an xn ,
где ai – числа, xi – переменные.
Линейным называют уравнение, в левой части которого стоит линейная
комбинация неизвестных, а в правой – число:
a1 x1 a2 x2 ... an xn b,
где ai и b – числа, xi – неизвестные.
Линейное уравнение называют однородным, если b 0 , и
неоднородным, если b 0 .
Системой линейных уравнений (линейной системой) называют систему
a11 x1 a12 x2 ... a1n xn b1
a21 x1 a22 x2 ... a2 n xn b2
,
..........
..........
..........
..........
....
am1 x1 am 2 x2 ... amn xn bm
где aij, bi – числа, xj – неизвестные, n – число неизвестных, m – число
уравнений.
7.
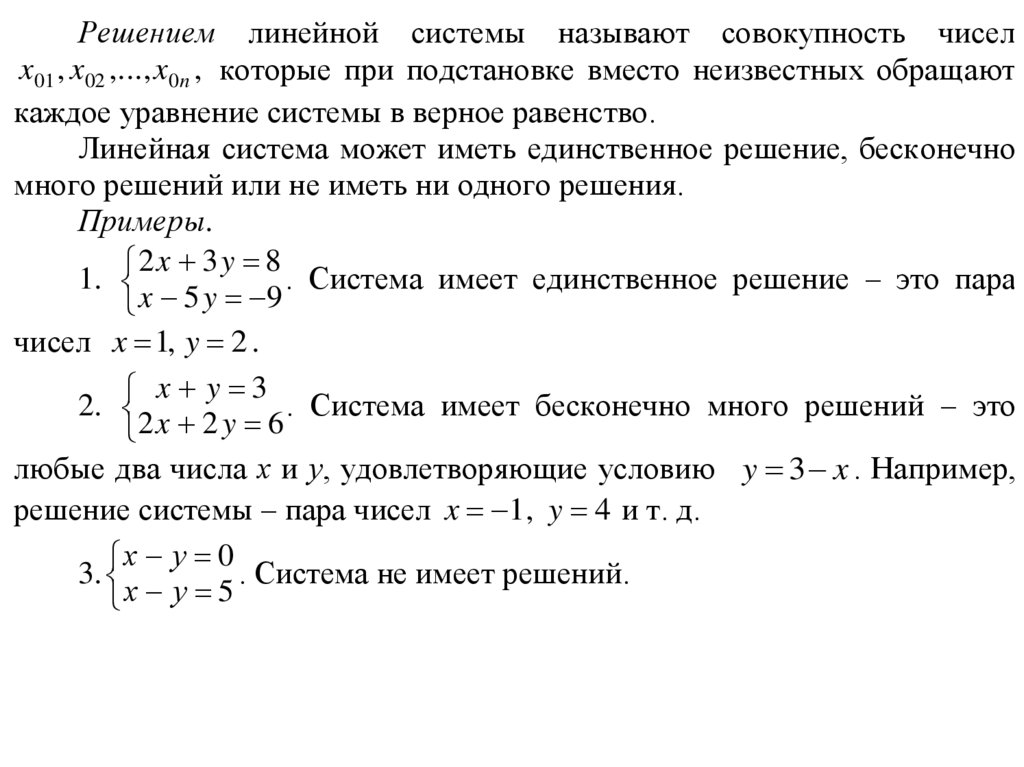
Решением линейной системы называют совокупность чиселx01 , x02 ,..., x0 n , которые при подстановке вместо неизвестных обращают
каждое уравнение системы в верное равенство.
Линейная система может иметь единственное решение, бесконечно
много решений или не иметь ни одного решения.
Примеры.
2x 3y 8
1.
. Система имеет единственное решение – это пара
x 5 y 9
чисел x 1, y 2 .
x y 3
2.
. Система имеет бесконечно много решений – это
2
x
2
y
6
любые два числа х и у, удовлетворяющие условию y 3 x . Например,
решение системы – пара чисел x 1, y 4 и т. д.
х у 0
3.
. Система не имеет решений.
х
у
5
8.
§ 8. Метод Гаусса решения линейных системРассмотрим линейную систему, в которой число уравнений равно
числу неизвестных:
a11 x1 a12 x2 ... a1n xn b1
a21 x1 a22 x2 ... a2 n xn b2
............................................
an1 x1 an 2 x2 ... ann xn bn
Согласно методу Гаусса тождественными преобразованиями систему
приводят к треугольному виду:
x1 aˆ12 x2 ... aˆ1n xn bˆ1
x2 ... aˆ 2 n xn bˆ2 ,
.....................................
xn bˆn
где â ij – новые числовые коэффициенты при неизвестных, b̂i – новые
правые части уравнений.
Из последнего уравнения преобразованной системы находят xn, а
затем последовательной подстановкой в предыдущие уравнения находят
остальные неизвестные.
9.
Если в процессе преобразований какое-нибудь уравнение системыпревратится в тождество вида 0 0 , то исключение этого уравнения из
системы уменьшает число уравнений по сравнению с числом
неизвестных. Такая система имеет множество решений.
Если в процессе преобразований какое-нибудь уравнение системы
превратится в равенство вида 0 1 , например, когда коэффициенты при
неизвестных равны нулю, а правая часть не равна нулю, то такая
система не имеет решения.
x 3y z 4
Пример. Решить линейную систему 2 x y 5 z 15.
5 x y 4 z 19
Вычитая из второго уравнения системы умноженное на 2 первое
уравнение, а из третьего уравнения – умноженное на 5 первое уравнение,
получим систему
x 3 y z 4
7 y 3z 23 .
14 y 9 z 1
Вычитая из третьего уравнения этой системы удвоенное второе
уравнение, получим
10.
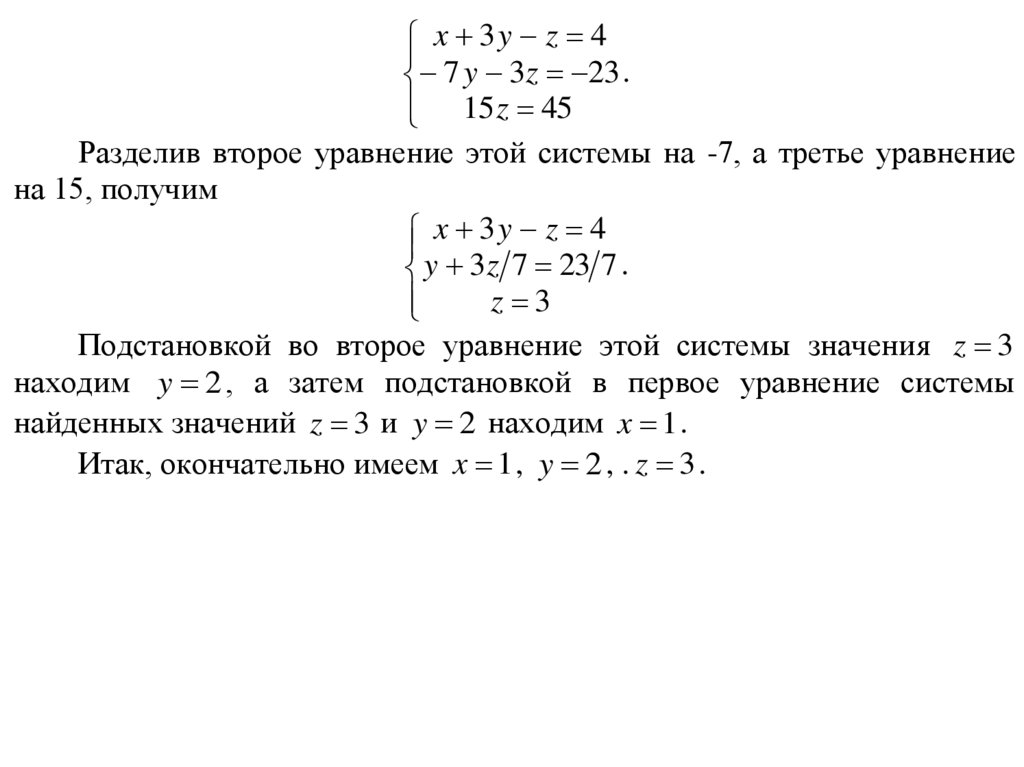
x 3 y z 47 y 3z 23 .
15 z 45
Разделив второе уравнение этой системы на -7, а третье уравнение
на 15, получим
x 3y z 4
y 3z 7 23 7 .
z 3
Подстановкой во второе уравнение этой системы значения z 3
находим y 2 , а затем подстановкой в первое уравнение системы
найденных значений z 3 и y 2 находим x 1 .
Итак, окончательно имеем x 1 , y 2 , . z 3 .