







 physics
physicsSimilar presentations:
")
")






")

Моделирование бокового движения
1.
Лекция 7. МОДЕЛИРОВАНИЕ БОКОВОГО ДВИЖЕНИЯ4.4. Моделирование управляющих воздействий в боковом движении
Полное боковое возмущенное движение самолета в связанной системе координат
Математическая модель (система ДУ в форме Лапласа, при нулевых НУ)
р 2 аm y p am am x p am H H amM y M y ;
y
y
y
y
y
y
M
2
аmx p amx p amxx p amЭx Э amxx M x ;
p p a z a z p В .
Главный определитель системы уравнений
б
р 2 аmyy p
am xy p
am y
y
аmx p
x
р аmx p
p
2
az
Характеристический полином
B0p4 +B1p3 B2p2 B3p B4 =0
B1 аm xx аmyy аz
B0 1
amx
p az
где
B2 аm xx az аmyy аm xx az am y аmxy аm xy
B a а a a а
B3 аm xx аmyy az am y am x az аm xy аmxy аm xy az
4
y
y
z
my
mx
my
mx
2.
Условие устойчивости полного бокового движенияB1 0; B2 0; B3 0; B4 0; R 0, где
R B1B2 B3 B32 B12 B4
р 2 аm y p am am x p am H H amM y M y ;
y
y
y
y
y
y
M
2
аmx p amx p amxx p amЭx Э amxx M x ;
p p a z a z p В .
3.
Боковое движения «рыскание -скольжение»Главный определитель КПБД
Математическая модель
р аm p am am H a
y
y
y
p p a z p В ,
2
y
H
My
my
M y;
y
р аmy p
am y
p
p az
2
бк
Характеристической полином КПБД выглядит:
p( p 2 F1 p F )2 0,
F1 аmyy аz
F2 аmy аmy аz
Условие устойчивости короткопериодического бокового движения:
F1 0; F2 0.
y
4.
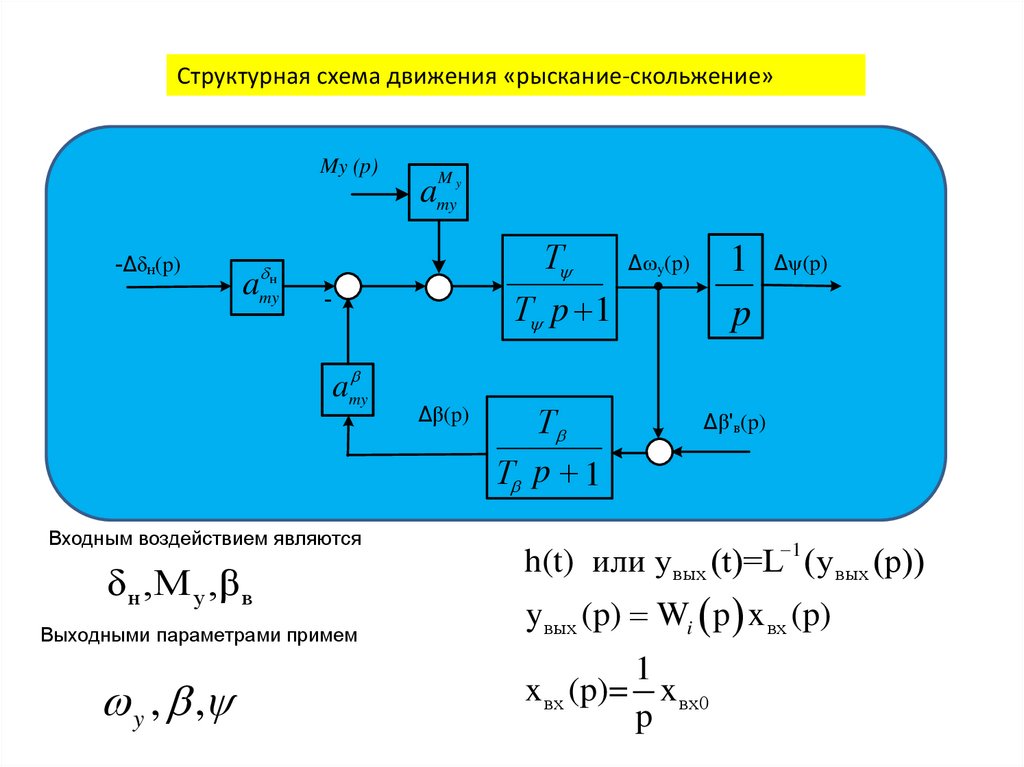
Структурная схема движения «рыскание-скольжение»My (p)
My
amy
-Δδн(p)
Т
Δωy(p)
Т p 1
н
amy
amy
Входным воздействием являются
δн ,M y ,βв
Выходными параметрами примем
y , ,
Δβ(p)
Т
Т p 1
1 Δψ(p)
p
Δβ'в(p)
h(t) или yвых (t)=L 1 (y вых (p))
y вых (p) Wi p x вх (p)
1
x вх (p)= x вх0
p
5.
Определить передаточные функции позволяет правило Крамера.Для входного управляющего воздействия они имеют следующий вид:
y
аm y
к
p
0
к
-am нy
am y
0
p
a
z
W y p pW p
н
н
am нy
am Hy p az
к (p)
W p
2
бк (p) p F1 p F2
н
н
р аm y p
2
к (p)
W p
2
(p)
p
p
F1 p F2
бк
н
am Hy p az
y
y
p amy az p amy az amy
2
am Hy p a z
2
p
F1 p F2
6.
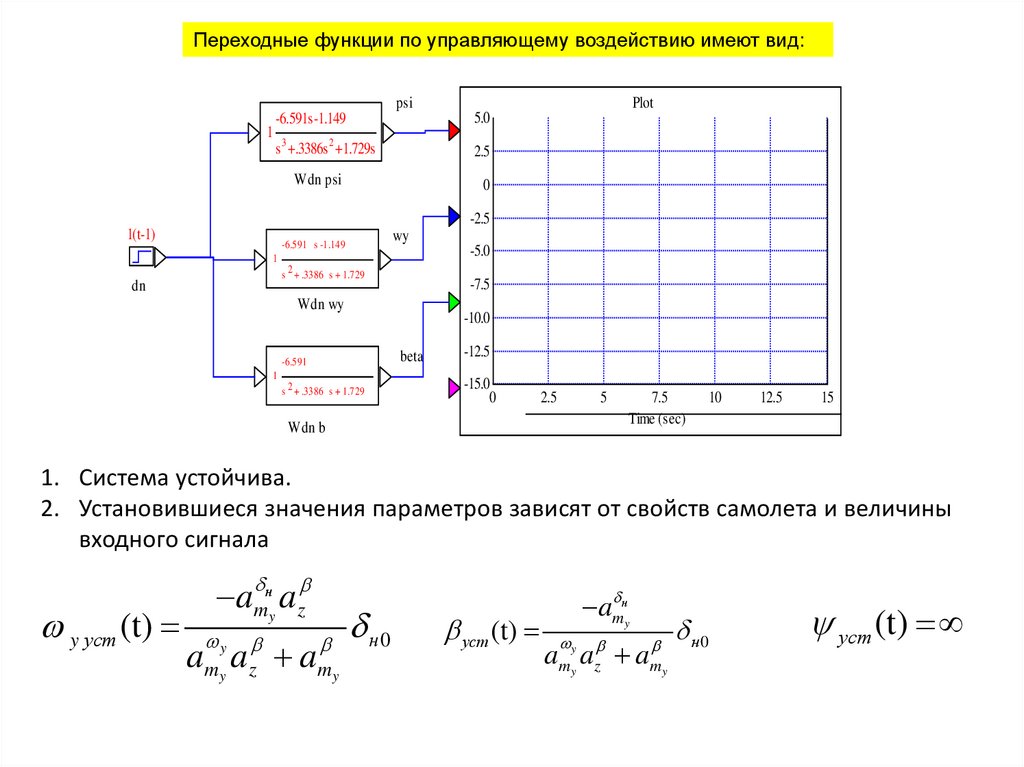
Переходные функции по управляющему воздействию имеют вид:psi
1
Plot
-6.591s-1.149
5.0
s 3 +.3386s 2 +1.729s
2.5
Wdn psi
0
-2.5
1(t-1)
wy
-6.591 s -1.149
-5.0
1
s 2 + .3386 s + 1.729
dn
-7.5
Wdn wy
-10.0
beta
-6.591
1
s 2 + .3386 s + 1.729
-12.5
-15.0
0
2.5
5
Wdn b
7.5
Time (sec)
10
12.5
15
1. Система устойчива.
2. Установившиеся значения параметров зависят от свойств самолета и величины
входного сигнала
am нy az
y уст (t)
amy az amy
y
н0
уст (t)
am нy
amy az amy
y
н0
уст (t)
7.
Модель движения «чистый крен»p 2 am xx p am Эx Э amMxx M x
•Главный определитель системы
x
кр p amx p
2
•Дополнительные определители по
управляющему и по моментному возмущению
э am x , M x a
Mx
mx
э
Структурная схема изолированного движения по крену
-Δδэ(p)
Тγ
Т p 1
э
a mх
Mx
amy
Mx
Δωx(p)
1
p
Δγ(p)
8.
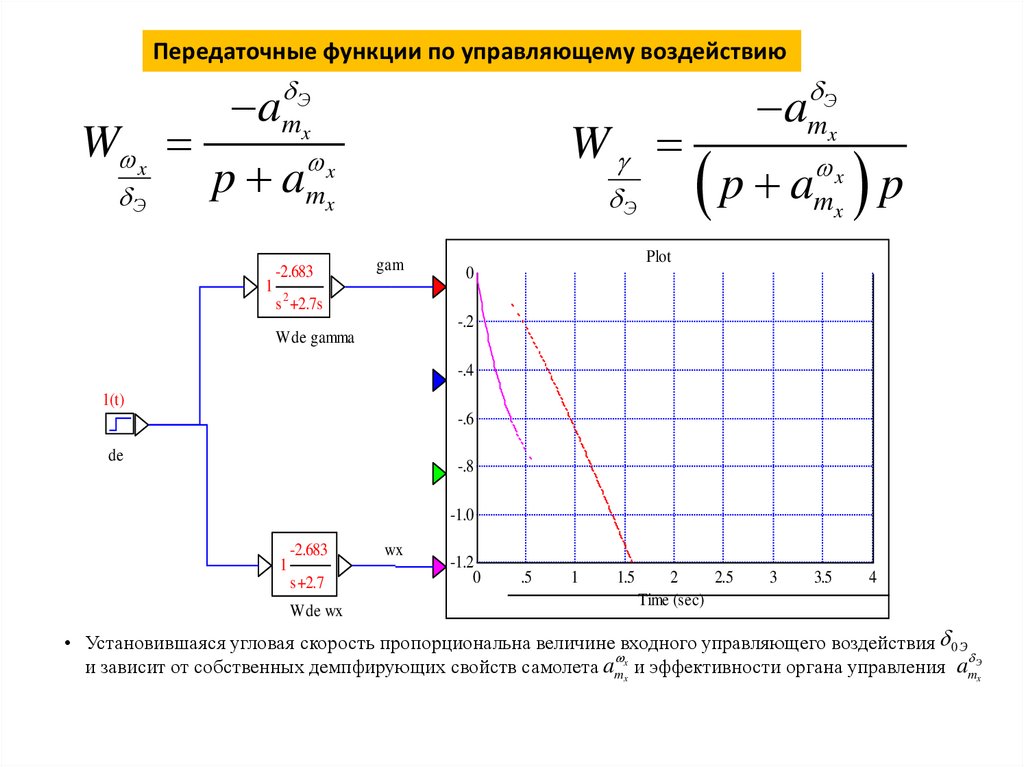
Передаточные функции по управляющему воздействиюW x
Э
Э
am x
W
x
p am x
1
-2.683
Э
gam
Э
amx
p a p
x
mx
Plot
0
s 2 +2.7s
-.2
Wde gamma
-.4
1(t)
-.6
de
-.8
-1.0
1
-2.683
s+2.7
Wde wx
wx
-1.2
0
.5
1
1.5
2
2.5
Time (sec)
3
3.5
4
• Установившаяся угловая скорость пропорциональна величине входного управляющего воздействия 0Э
и зависит от собственных демпфирующих свойств самолета amxx и эффективности органа управления amЭx
9.
4.5. Моделирование внешних возмущений в боковом движении•короткопериодическое движение рыскание - скольжение
M y и в ,
Входным воздействием выберем
Выходными параметрами примем
н , , ,
согласно правила Крамера, для моментного возмущения передаточные функции имеют вид:
amyy p az
amyy p az
M
W p
My
M
p p 2 amyy az p amyy az am y
W y p
My
p 2 amyy az p amyy az am y
M
W p
My
amyy
p 2 amyy az p amyy az am y
переходные функции по моментному возмущению :
s + .1743
psi
8.552e-5
Plot
.00020
s 3 + .3386 s 2 + 1.729 s
.00015
WMy psi
1(t-1)
s + .1743
wy
.00010
8.552e-5
s 2 + .3386 s + 1.729
5.00000e-5
My
WMy wy
0
8.552e-5
1
s 2 + .3386 s + 1.729
WMy b
beta
-5.00000e-5
0
2.5
5
7.5
Time (sec)
10
12.5
15
10.
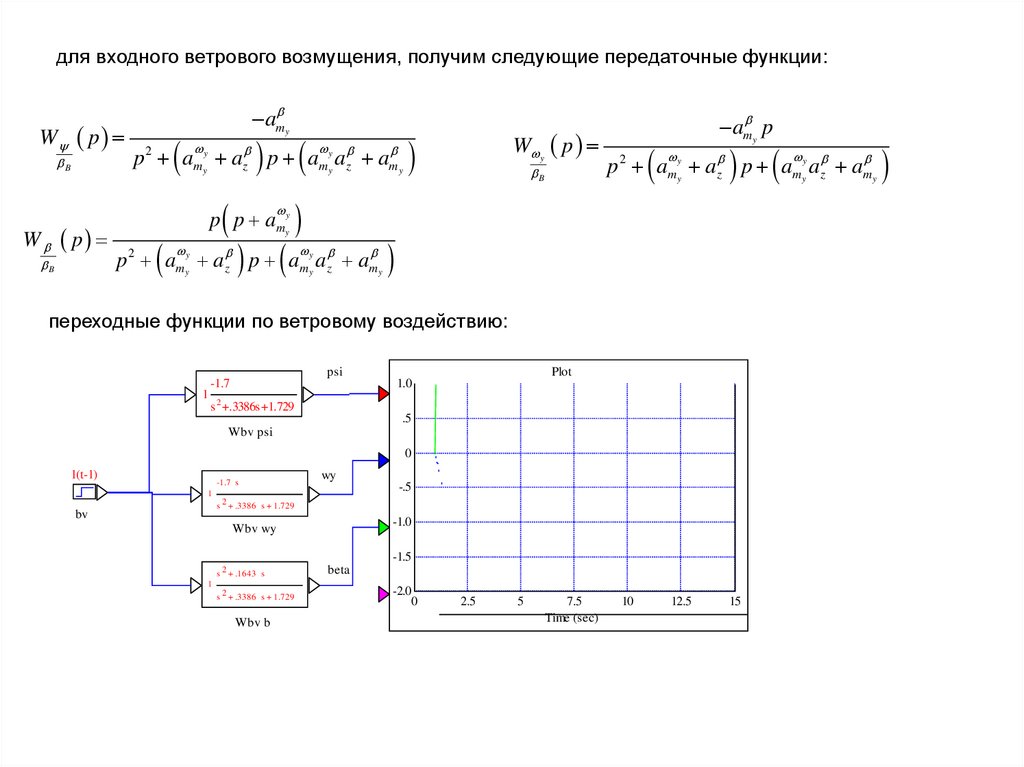
для входного ветрового возмущения, получим следующие передаточные функции:W p
B
W p
B
am y
p 2 amyy az p amyy az am y
p p amyy
p 2 amyy az p amyy az am y
W y p
B
am y p
12.5
15
переходные функции по ветровому воздействию:
psi
1
-1.7
Plot
1.0
s 2 +.3386s+1.729
.5
Wbv psi
0
1(t-1)
-1.7 s
wy
-.5
1
s 2 + .3386 s + 1.729
bv
-1.0
Wbv wy
-1.5
s 2 + .1643 s
1
s 2 + .3386 s + 1.729
Wbv b
beta
-2.0
0
2.5
5
7.5
Time (sec)
p 2 amyy az p amyy az am y
10
11.
.•изолированное боковое движение по крену
возмущающим воздействием является моментное возмущение
Mx
Выходными параметрами примем y ,
Передаточные функции по возмущающему воздействию
W x
Mx
amMxx
W
x
p am x
.0004775
Mx
gam
amMxx
p a p
x
mx
Plot
.000200
1
s 2 + 2.7 s
.000175
WMx gamma
.000150
.000125
1(t)
.000100
Mx
7.500000e-5
5.000000e-5
2.500000e-5
1
.0004775
s+2.7
WMx wx
wx
0
0
.5
1
1.5
2
2.5
Time (sec)
3
3.5
4
12.
4.6. Влияние эксплуатационных факторов на боковое движение.Эксплуатационные факторы, влияющие на боковую устойчивость самолета.
• Степень путевой статической устойчивости по углу скольжения зависит в основном от относительных
координат центра масс самолета хт и фокуса хFβ.
• Степень поперечной статической устойчивости по углу скольжения зависит в основном от
конструктивных особенностей самолета.
• Изменение числа М полета и скорости проявляется в перемещении фокуса по углу скольжения.
• Улучшить боковую устойчивость самолета с помощью автоматических средств можно путем
автоматического отклонения рулей направления и элеронов в функции угловых скоростей рыскания,
крена и боковой перегрузки
Эксплуатационные факторы, влияющие на боковую балансировку и управляемость самолета.
Факторы- боковой ветер, отказ двигателя, несимметричный выпуск закрылков, обледенение, режим полета
• Влияние бокового ветра проявляется в увеличении угла скольжения, которое парируется
соответствующим отклонением руля направления и элеронов.
• При отказе двигателя самолет разворачивается в сторону отказавшего двигателя с одновременным
накренением на крыло с отказавшим двигателем. Для парирования необходимо соответствующие
отклонения элеронов и руля направления.
• При несимметричном выпуске закрылков у самолета появляется крен вследствие разных подъемных
сил на полукрыльях, который должен компенсироваться отклонением элеронов.
• При обледенении носка киля возникает срыв на вертикальном оперении, фокус самолета по углу
скольжения смещается вперед, уменьшая путевую устойчивость, усилия на педалях уменьшаются.
• Изменение скорости, числа М и высоты полета приводит к изменению градиентов усилий и
перемещений на педалях и штурвале. Обеспечение боковой балансировки и улучшения боковой
управляемости решается автоматическими средствами соответствующим отклонением руля направления
и элеронов в функции боковой перегрузки, а также изменением коэффициентов штурвала в функции
скорости полета и высоты вследствие