 physics
physicsSimilar presentations:






")



Algorithm for adaptive flight control of variable-mass uav
1.
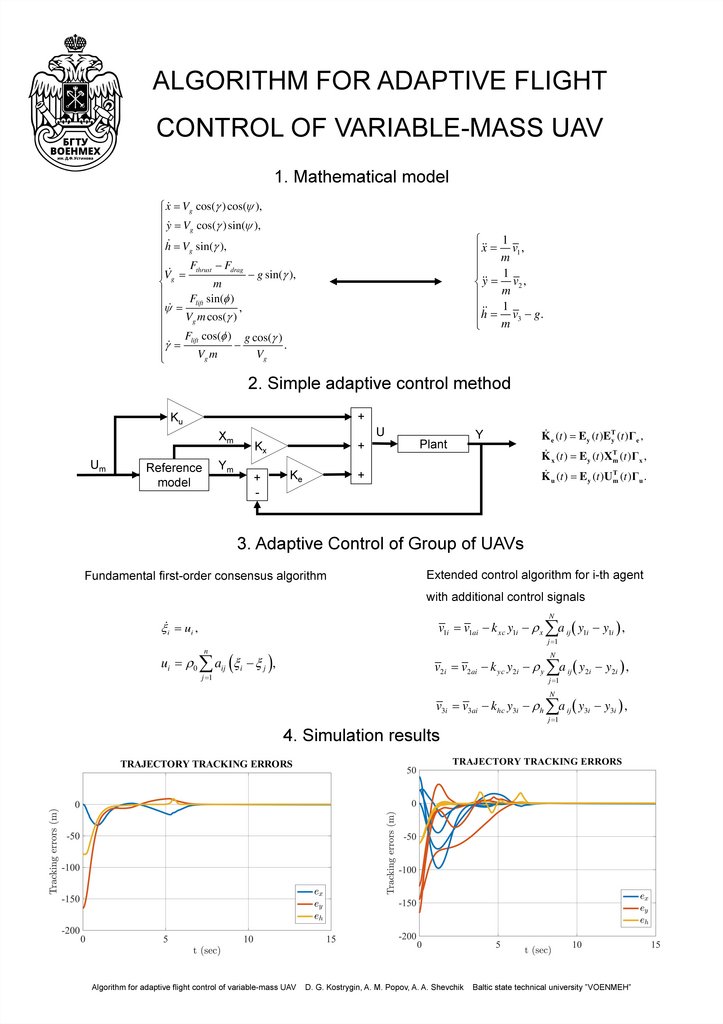
ALGORITHM FOR ADAPTIVE FLIGHTCONTROL OF VARIABLE-MASS UAV
1. Mathematical model
x Vg cos( ) cos( ),
y Vg cos( ) sin( ),
h
V
sin(
),
g
Fthrust Fdrag
Vg
g sin( ),
m
Flift sin( )
,
Vg m cos( )
Flift cos( ) g cos( )
.
V m V
g
g
1
x
v
,
1
m
1
y v2 ,
m
1
h m v3 g .
2. Simple adaptive control method
+
Ku
Xm
Um
Ym
Reference
model
U
+
Kx
+
-
Ke
Plant
Y
K e (t ) Ey (t )E (t ) Γe ,
T
y
K x (t ) Ey (t ) X (t ) Γ x ,
T
m
K u (t ) Ey (t )U (t ) Γu .
T
m
+
3. Adaptive Control of Group of UAVs
Fundamental first-order consensus algorithm
Extended control algorithm for i-th agent
with additional control signals
N
v1i v1ai k xс y1i x a ij y1i y1i ,
i ui ,
j 1
ui 0 aij i j ,
n
N
v2i v2 ai k yс y2i y a ij y2i y2i ,
j 1
j 1
N
v3i v3ai khс y3i h a ij y3i y3i ,
j 1
4. Simulation results
Algorithm for adaptive flight control of variable-mass UAV
D. G. Kostrygin, A. M. Popov, A. A. Shevchik
Baltic state technical university ”VOENMEH”