











 electronics
electronicsSimilar presentations:






")



Синтез и анализ систем автоматического управления следящих систем на судах
1. Презентация курсовой работы по дисциплине: « Теория автоматического управления»
Курсанта группы СЭ-31Каграманова Р. В.
2. СИНТЕЗ И АНАЛИЗ САУ СЛЕДЯЩИХ СИСТЕМ
3.
Целью данной курсовой работы являетсяприобретение навыков составления и преобразования
структурных схем, синтеза систем автоматического
управления и анализа работы систем управления.
Задания построены на примере следящих
электрических систем, которые применяются во
многих судовых системах.
4. Необходимость следящих электрических систем на судах
Морская интеллектуальная система (МИС) стабилизации качкисудна (СКС) с помощью перекладки руля предназначена для
уменьшения качки судна (вызываемую воздействием волн ).
Служат для повышения эффективности работы экипажа и
обеспечения комфорта пассажирам. Существует способ
использования руля для стабилизации качки наряду с
обеспечением заданного курса. Однако использования руля
одновременно для обеспечения курса и уменьшения качки
нетривиально, потому что доступен только один
исполнительный механизм. Важная проблема еще и
заключается в том, что механизм руля ограничен по амплитуде
и скорости. Это и послужило основаниям проведения
настоящих исследований по разработанной МИС СКС.
5.
Рисунок 1 - Функциональная схемы следящейсистемы
6. 1.Описание СС с помощью ДУ
7. 2.Составление структурной схемы СС
Рисунок 2 - Блоки структурной схемы, составленные поуравнениям
8.
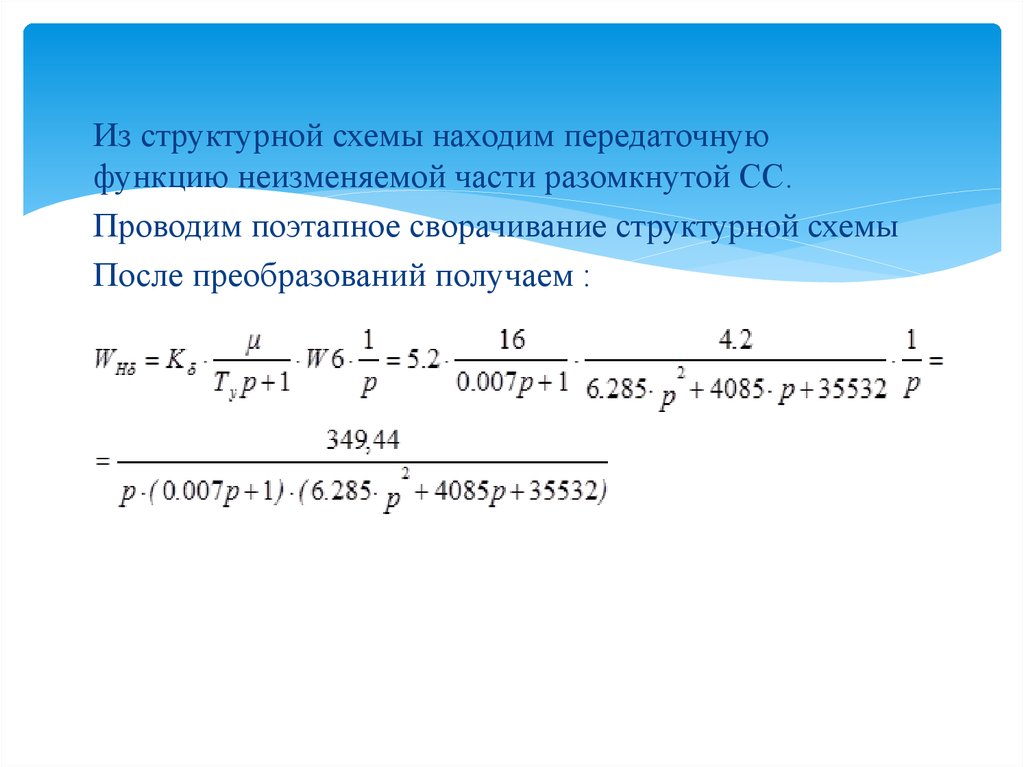
Из структурной схемы находим передаточнуюфункцию неизменяемой части разомкнутой СС.
Проводим поэтапное сворачивание структурной схемы
После преобразований получаем :
9. 3. Построение ЛАЧХ неизменяемой части следящей системы
Рисунок 3 - ЛАЧХ10.
Если бы ЛАЧХ LНЧ везде совпала бы с желаемойЛАЧХ LЖ , то корректирующего устройства не
потребовалось. Поэтому, в общем случае, требуется
введение корректирующего устройства, которое
обеспечит работу СС с желаемой ЛАЧХ, что
гарантирует выполнение заданных в проекте
показателей качества при заданных изменениях
входного сигнала
11. 4. Расчет передаточной функции последовательного КУ1
Так как КУ1 соединен последовательно с неизменяемойчастью СС, то
После ряда преобразований, выполним деление в
соответствии с предыдущей формулой и получим :
12. 5.Составление и расчет принципиальной электрической схемы КУ1
Схема КУ1 будет состоять из последовательно соединенныхпростейших блоков, каждый из которых реализует одну из
простейших дробей выражения
с точностью до постоянного множителя. Следовательно, для
рассматриваемого примера будет последовательное
соединение блоков.
13.
Рисунок 9 - Принципиальная электрическая схем КУ114.
ВыводыСС может нормально функционировать при введении
только КУ1 .
Общий коэффициент усиления схем на ОУ1…ОУ3
составляет kОУ1.ОУ2.ОУ3= 75212.5 дБ,что больше
требуемого коэффициент усиления kун =16288 дБ,
именно поэтому вводить дополнительно усилитель не
требуется.