






 physics
physicsSimilar presentations:
")


")
")





Основы теории фильтра Калмана - Бьюси (лекция 6, 7)
1.
Лекция 6, 7ОСНОВЫ ТЕОРИИ ФИЛЬТРА КАЛМАНА-БЬЮСИ
Рассмотрим постановку задачи и основы построения оптимальных
линейных фильтров, известных под названием фильтров Калмана-Бьюси
Фильтр Калмана-Бьюси отличается от фильтра Винера постановкой
задачи и способом его описания, поэтому эти два аспекта мы рассмотрим
более подробно.
1
2.
1. Постановка задачи фильтрации по Калману-БьюсиВ n-мерном пространстве задан подлежащий фильтрации линейный
случайный процесс, формируемый линейной динамической системой (ОКУ),
описываемой уравнением вида:
dX
A(t ) X(t ) B(t ) W(t );
dt
X(t0 ) 0,
(6.1)
где X(t ) – задаваемый случайный процесс в виде n-мерного вектора;
W(t ) – случайный процесс в виде “белого” шума с корреляционной
матрицей:
KW (t , ) M [ W(t ) WT ( )] Q(t ) (t ) .
(6.2)
2
3.
Матрица интенсивностей “белого” шума имеет вид диагональнойматрицы размера m m
q1 0
0 q2
Q(t )
... ...
0 0
... 0
... 0
.
... ...
... qm
(6.3)
Матрицы A(t) и B(t) размера n n и m m соответственно определяют
параметры линейной динамической системы (ОКУ). Такой случайный
процесс получил название марковского, а линейную динамическую систему,
формирующую рассматриваемый марковский процесс, обычно называют
формирующим фильтром. Иначе говоря, объект измерения (ОКУ) выполняет
роль формирующего фильтра.
3
4.
Случайный процесс Х(t) наблюдается (контролируется) с помощьюизмерительной системы, на выходе которой действует аддитивная помеха в
виде “белого” шума V(t):
Z(t ) C(t ) X(t ) V(t ) .
(6.4)
Z(t )
Здесь
–
вектор
суммарного
выходного
сигнала;
V(t ) – случайный процесс в виде “белого” шума с корреляционной
матрицей:
KV (t , ) M [V (t ) VT ( )] R (t ) (t ) .
(6.5)
Матрица интенсивностей R (t ) имеет вид диагональной матрицы
размера р р
r1
0
R (t )
...
0
0
r2
...
0
... 0
... 0
.
... ...
... rp
(6.6)
Матрица C(t ) определяет параметры измерительной системы и имеет
размер р n.
4
5.
Требуется построить линейный фильтр, оптимальным образомвыделяющий реализацию векторного случайного процесса Х(t) в виде
о
некоторой оценки X (t ) при наблюдении (контроле) процесса Z(t ) .
Критерием оптимальности является минимум
ожидания квадрата нормы вектора погрешности Хε(t)
2
M X (t ) min ,
математического
(6.7)
где X (t ) X (t ) X(t ) .
o
В отличие от задачи фильтрации по Винеру здесь рассматривается
многомерный случайный процесс, задаваемый не корреляционными
функциями, а стохастическим дифференциальным уравнением. Помимо
этого, ставится задача отыскания способа построения оптимального фильтра,
а не получение оптимальной импульсной характеристики фильтра.
5
6.
Как правило, при построении фильтра Калмана–Бьюси принимаютследующие допущения:
1.
“Белые” шумы, действующие на входе формирующего фильтра
(ОКУ) и на выходе измерительной системы, некоррелированы:
M W (t )V T ( ) 0 .
2.
(6.8)
Наблюдаемый (контролируемый) процесс Х(t) и “белый” шум на
выходе измерительной системы некоррелированы:
M Х(t )VT ( ) 0 .
3.
Формирующий
фильтр
(ОКУ)
(6.9)
удовлетворяет
условиям
физической реализуемости, т.е. переходная матрица системы (ОКУ)
Ф(t , t0 ) 0 при t t0 .
(6.10)
6
7.
2. Математическое описание и структура фильтра Калмана-БьюсиПусть имеется такой физически реализуемый линейный фильтр что его
o
выходной сигнал X (t ) является оптимальной оценкой наблюдаемого
(контролируемого) процесса X(t ) . В соответствии с теорией фильтра
Калмана–Бьюси характеристики такого фильтра будут
векторно-матричным дифференциальным уравнением вида:
описываться
dXo
A(t ) K (t )C(t ) Xo (t ) K (t )Z(t ).
(7.1)
dt
Это дифференциальное уравнение устанавливает связь между вектором
выходного сигнала фильтра – оценки X o (t ) и вектором суммарного входного
сигнала Z(t ) , т.е. описывает работу такого оптимального фильтра КалманаБьюси.
7
8.
Структурная схема фильтра Калмана-Бьюси будет иметь видВажнейшей особенностью этой структуры является то обстоятельство,
что она подобна структурной схеме формирующего фильтра (ОКУ) и
отличается от последнего наличием матричного блока K (t ) в прямой цепи.
Это существенно облегчает практическую реализацию оптимального
фильтра Калмана-Бьюси, так как его описание и программное обеспечение
подобно описанию объекта измерения или управления. Кроме того, вид
дифференциального уравнения, а следовательно, и структура фильтра
остается неизменной для любого объекта измерения или управления.
8
9.
Полезно получить еще одно дифференциальное уравнение дляоптимального фильтра Калмана-Бьюси. Дифференцируя по времени
соотношение
X (t ) X(t ) Xo (t ) ,
(7.2)
dX dX dXo
.
dt
dt
dt
(7.3)
получим
После подстановки
dX
A(t ) X(t ) B(t ) W(t );
dt
dXo
A(t ) K (t )C(t ) Xo (t ) K (t )Z(t );
dt
Z(t ) C(t ) X(t ) V (t ),
(7.4)
(7.5)
(7.6)
будем иметь
dX
A(t ) K (t )C(t ) X (t ) B(t ) W(t ) K (t )V(t ).
dt
(7.7)
9
10.
Это уравнение устанавливает связь между вектором погрешностифильтрации X (t ) и “белыми” шумами W(t ) , V(t ) , действующими на входе
объекта измерения (или управления) и на выходе измерительной системы.
Структурная схема, соответствующая уравнению (7.7), имеет вид
Структурная схема, поясняющая влияние помех на погрешность фильтрации
10
11.
Видно, что эта схема аналогична схеме оптимального фильтра иотличается лишь входными воздействиями.
В
уравнения,
описывающие
фильтр
Калмана-Бьюси
и
вектор
погрешностей фильтрации, входит матрица K (t ) , которая получила название
матрицы коэффициента усиления фильтра:
K11 K12
K 21 K 22
K (t )
...
...
K n1 K n 2
... K1n
... K 2 n
.
... ...
... K nn
(7.8)
11
12.
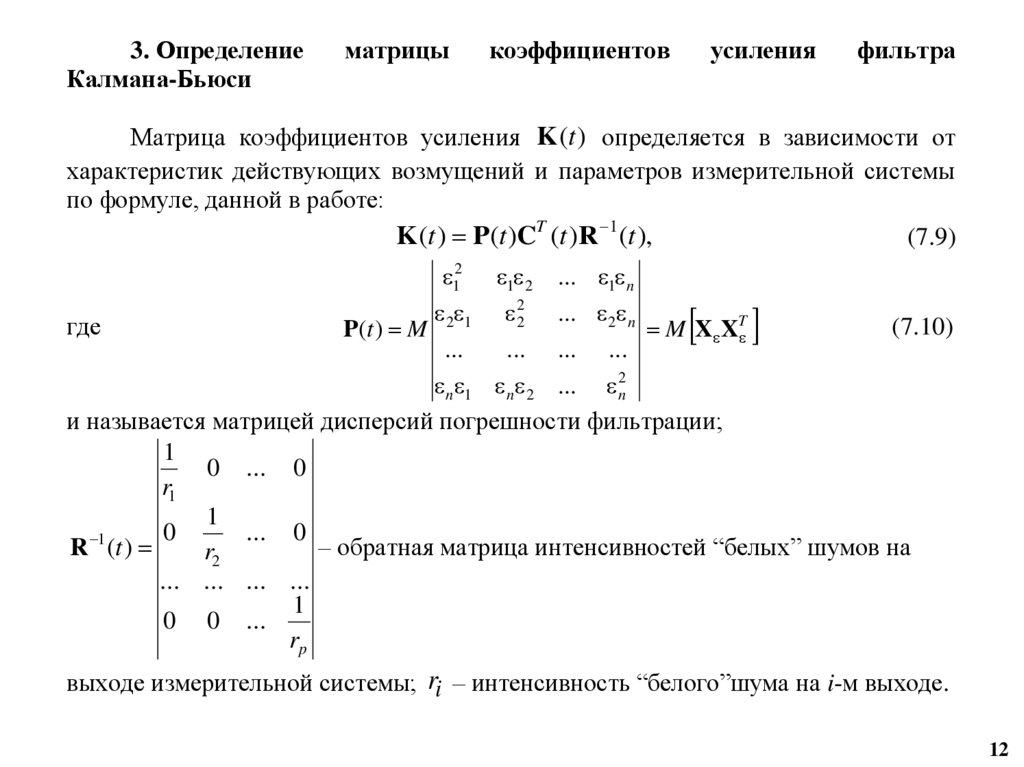
3. ОпределениеКалмана-Бьюси
матрицы
коэффициентов
усиления
фильтра
Матрица коэффициентов усиления K (t ) определяется в зависимости от
характеристик действующих возмущений и параметров измерительной системы
по формуле, данной в работе:
K (t ) P(t )CT (t )R 1 (t ),
(7.9)
12 1 2 ... 1 n
2 1 22 ... 2 n
где
(7.10)
P(t ) M
M X XT
...
... ... ...
n 1 n 2 ... 2n
и называется матрицей дисперсий погрешности фильтрации;
1
0 ... 0
r1
1
0
... 0
1
– обратная матрица интенсивностей “белых” шумов на
R (t )
r2
... ... ... ...
1
0 0 ...
rp
выходе измерительной системы; ri – интенсивность “белого”шума на i-м выходе.
12
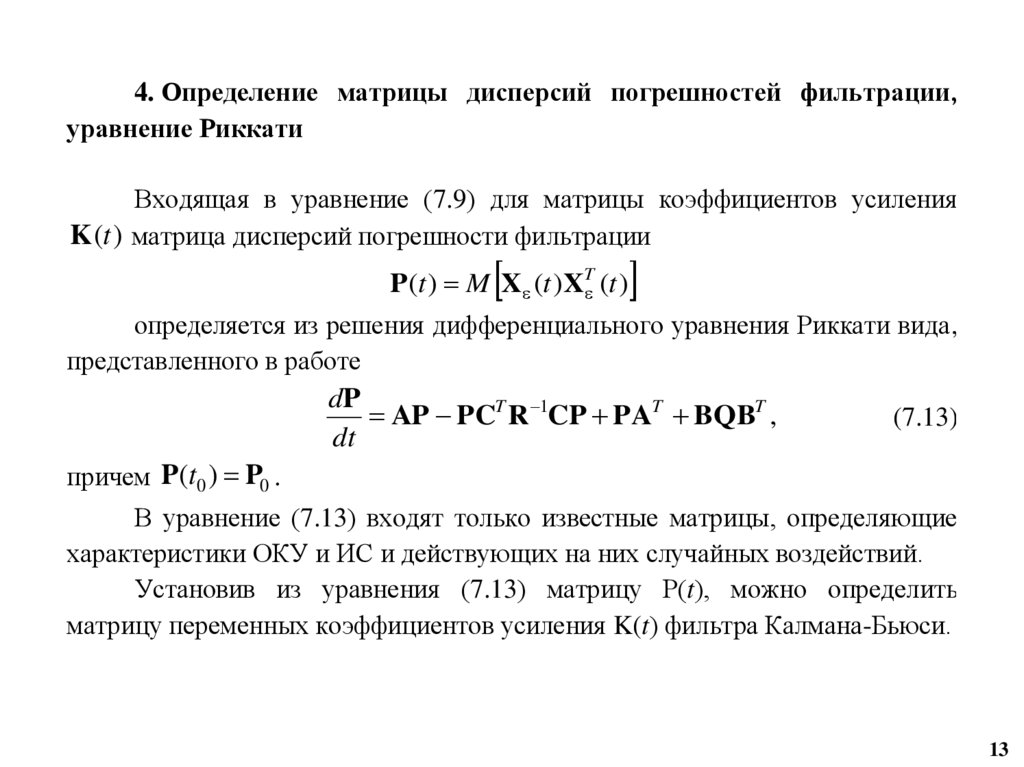
13.
4. Определение матрицы дисперсий погрешностей фильтрации,уравнение Риккати
Входящая в уравнение (7.9) для матрицы коэффициентов усиления
K (t ) матрица дисперсий погрешности фильтрации
P(t ) M X (t ) XT (t )
определяется из решения дифференциального уравнения Риккати вида,
представленного в работе
dP
AP PCT R 1CP PAT BQBT ,
(7.13)
dt
причем P(t0 ) P0 .
В уравнение (7.13) входят только известные матрицы, определяющие
характеристики ОКУ и ИС и действующих на них случайных воздействий.
Установив из уравнения (7.13) матрицу Р(t), можно определить
матрицу переменных коэффициентов усиления K(t) фильтра Калмана-Бьюси.
13