


 physics
physicsSimilar presentations:










Плоская система сходящихся сил
1.
Красноярский институт водного транспортаЛекция 3. Плоская система
сходящихся сил
Красноярск, 2021
2.
* Обучающая: изучениенового материала;
* Развивающая: умение
анализировать
информацию, применять
полученные знания на
практике;
* Воспитывающая:
воспитание трудолюбия,
ответственности за
порученное дело; умения
работать в коллективе.
* Изучить новый материал;
* Законспектировать
полученный материал;
* Закрепить полученные
знания в форме
фронтального опроса.
3.
Система сил, линии действия которых лежат водной плоскости, называется плоской. На
плоскости могут быть приложены произвольно
расположенные силы, пары сил и силы,
сходящиеся в одной точке.
4.
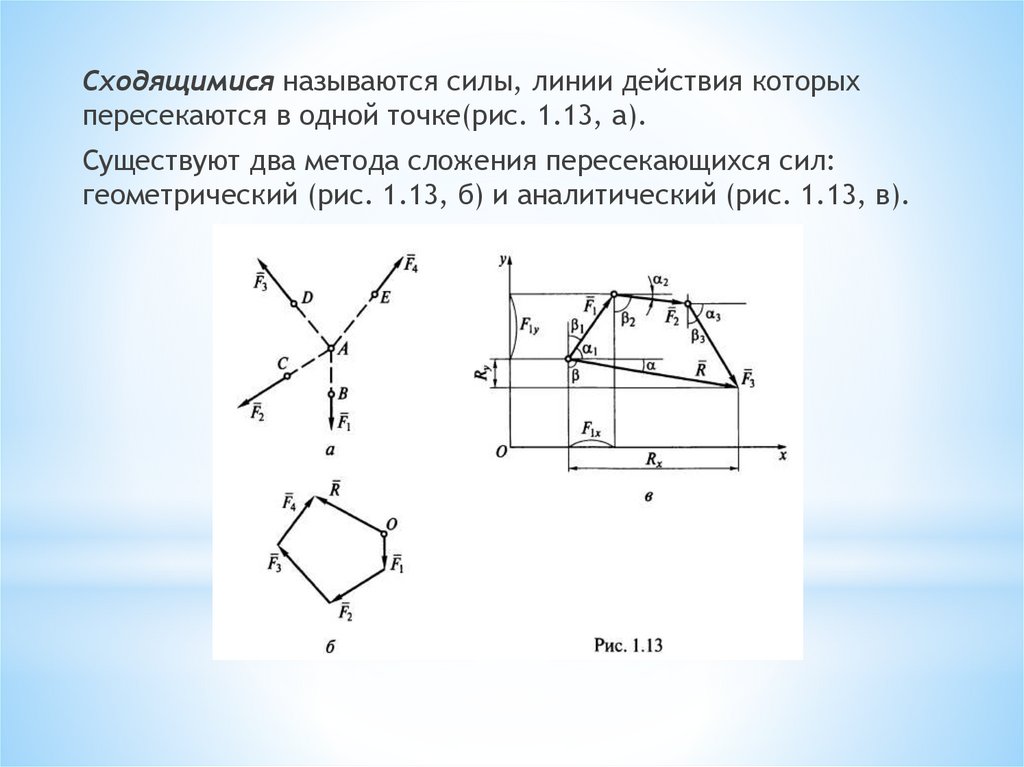
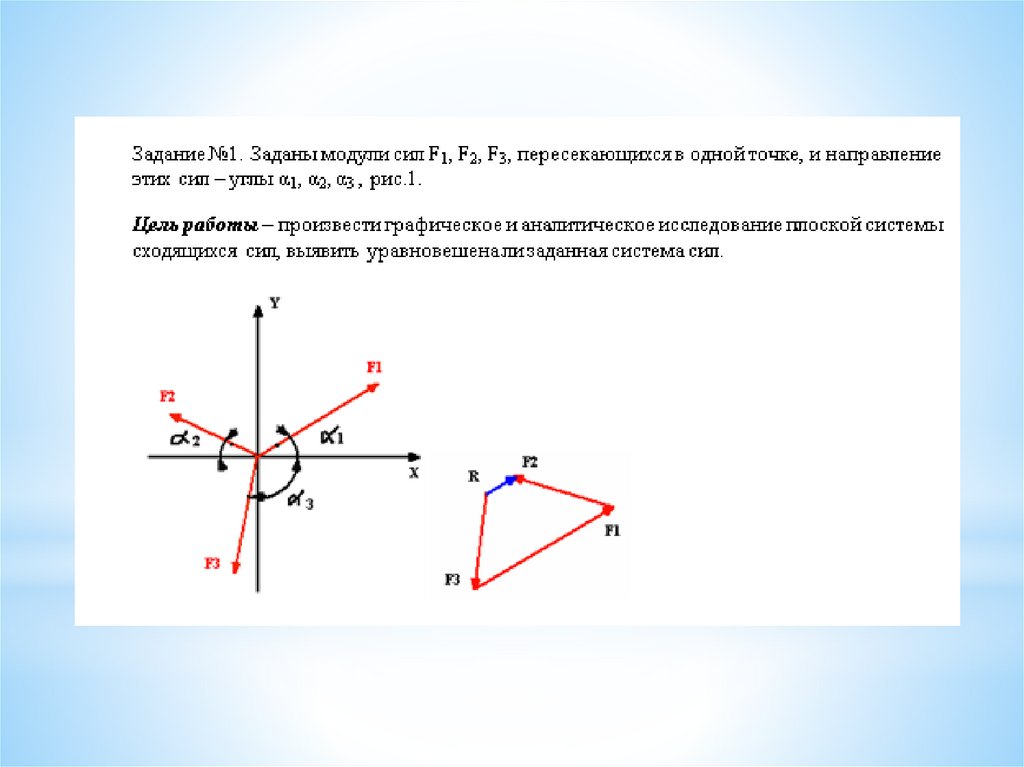
Сходящимися называются силы, линии действия которыхпересекаются в одной точке(рис. 1.13, а).
Существуют два метода сложения пересекающихся сил:
геометрический (рис. 1.13, б) и аналитический (рис. 1.13, в).
5.
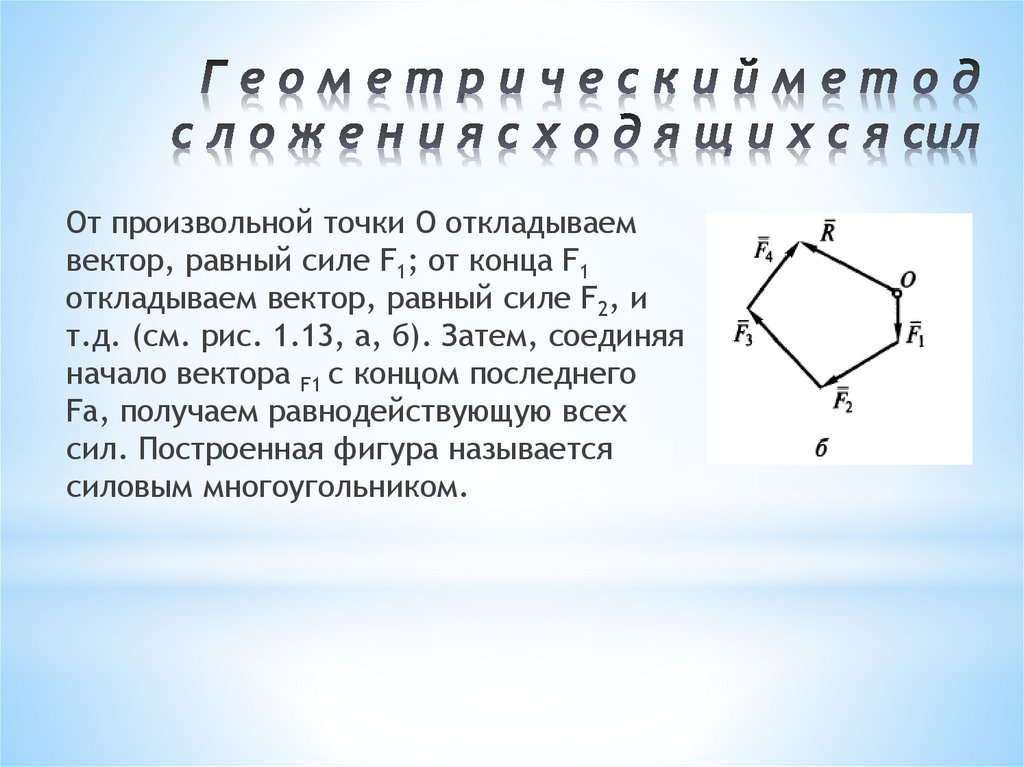
От произвольной точки О откладываемвектор, равный силе F1; от конца F1
откладываем вектор, равный силе F2, и
т.д. (см. рис. 1.13, а, б). Затем, соединяя
начало вектора F1 c концом последнего
Fa, получаем равнодействующую всех
сил. Построенная фигура называется
силовым многоугольником.
6.
Проектируя векторное равенство F1 + F2+F3 = R на оси координат (см. рис. 1.13,
в), получим два алгебраических
равенства:
7.
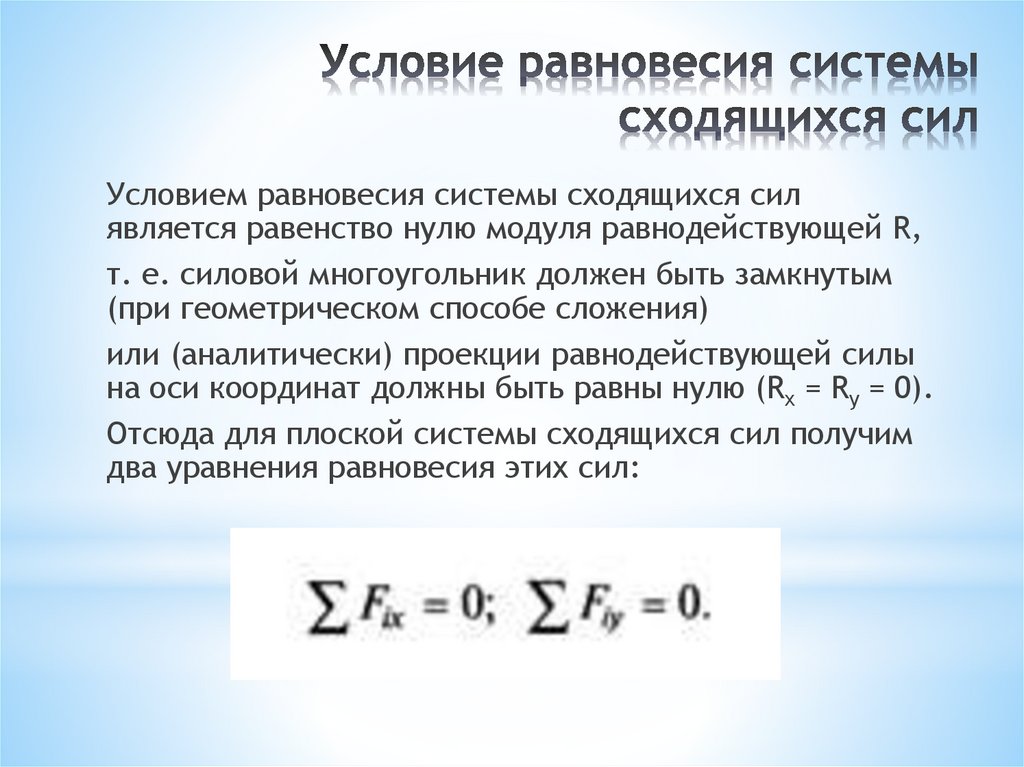
Условием равновесия системы сходящихся силявляется равенство нулю модуля равнодействующей R,
т. е. силовой многоугольник должен быть замкнутым
(при геометрическом способе сложения)
или (аналитически) проекции равнодействующей силы
на оси координат должны быть равны нулю (Rx = Ry = 0).
Отсюда для плоской системы сходящихся сил получим
два уравнения равновесия этих сил:
8.
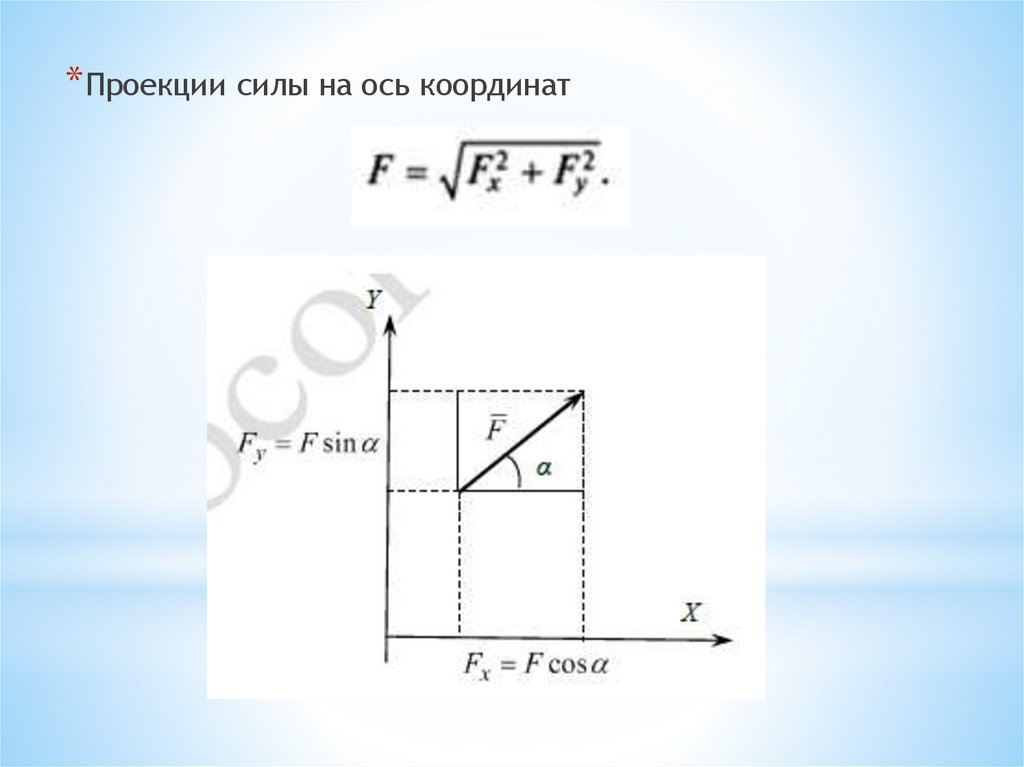
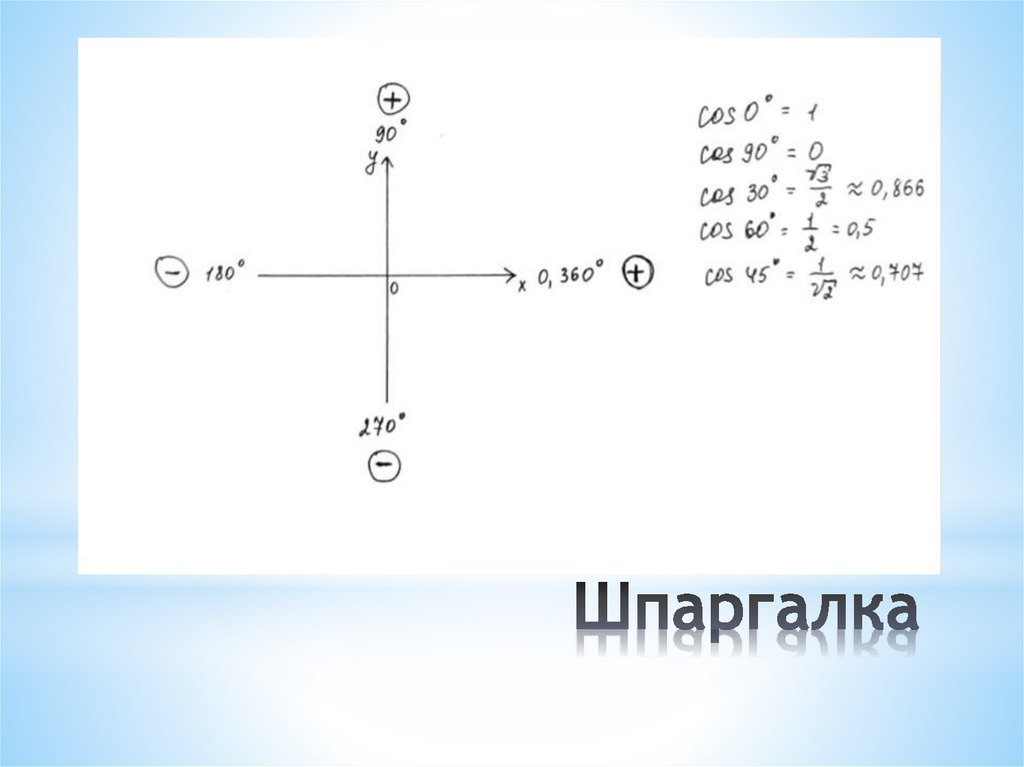
* Проекции силы на ось координат9.
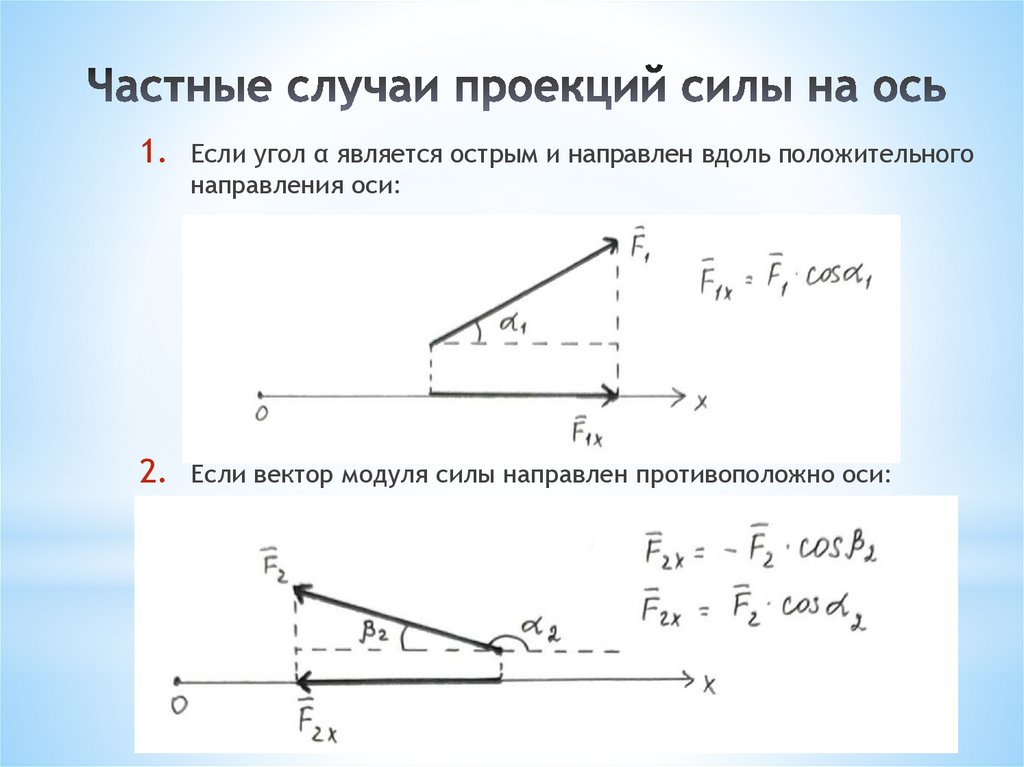
1. Если угол α является острым и направлен вдоль положительногонаправления оси:
2. Если вектор модуля силы направлен противоположно оси:
10.
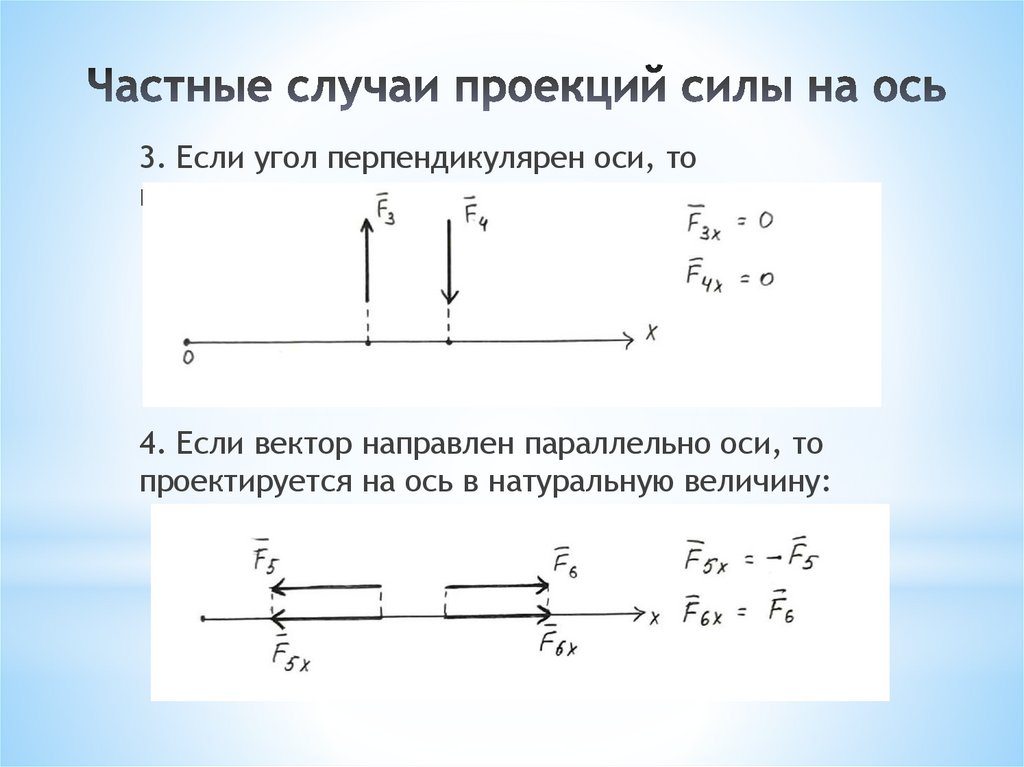
3. Если угол перпендикулярен оси, топроекция равна нулю:
4. Если вектор направлен параллельно оси, то
проектируется на ось в натуральную величину:
11.
12.
13.
Определить натяжение нитей, удерживающихтело весом 5 Н в равновесии.