































 physics
physicsSimilar presentations:










Плоская система сходящихся сил. Техническая механика
1. Плоская система сходящихся сил
Техническая механика2. Плоская система сил
Линии действия всех сил лежатв одной плоскости
Пространственная система
сил если линии действия
всех сил не лежат в одной
плоскости
3. Сходящаяся система сил
Система сил, линии действиякоторых пересекаются в одной
точке
4.
Система сходящихся силэквивалентна одной силе
– равнодействующей,
которая
равна векторной сумме сил
приложена в точке
пересечения линий их
действия
5. Методы определения равнодействующей
МЕТОДЫОПРЕДЕЛЕНИЯ
РАВНОДЕЙСТВУЮЩ
ЕЙ
6. Метод параллелограммов сил
На основании аксиомыпараллелограмма сил, каждые
две силы системы,
последовательно приводятся к
одной силе − равнодействующей
7. Векторный силовой многоугольник
Поочерёдно откладываем каждыйвектор силы от конечной точки
предыдущего вектора
Получаем многоугольник:
стороны векторы сил системы,
замыкающая сторона − вектор
равнодействующей системы
сходящихся сил
8. Векторный силовой многоугольник
9. Условия равновесия системы сходящихся сил
Геометрическое условиедля равновесия системы
сходящихся сил необходимо и
достаточно, чтобы векторный
силовой многоугольник,
построенный на этих силах, был
замкнутым
10. Условия равновесия системы сходящихся сил
Аналитические условия
Для равновесия системы
сходящихся сил необходимо и
достаточно, чтобы
алгебраические суммы
проекций всех сил на
координатные оси равнялись
нулю
11. Решение задач на равновесие геометрическим способом
РЕШЕНИЕ ЗАДАЧ НАРАВНОВЕСИЕ
ГЕОМЕТРИЧЕСКИМ
СПОСОБОМ
12. Геометрический способ
Удобен , если в системе трисилы
Тела считаются абсолютно
твёрдым
13. Алгоритм
1. Определить возможное направлениереакций связей
2. Вычертить многоугольник сил
системы, начиная с известных сил в
некотором масштабе
3. Измерить полученные векторы сил,
определить их величину, учитывая
масштаб
4. Для уточнения определить величины
векторов с помощью геометрических
зависимостей
14. Задача 1
Груз подвешен на стержнях инаходится в равновесии.
Определить усилия в стержнях
2
1
15. Решение
1. Усилия, возникающие встержнях крепления, по
величине равны силам, с
которыми стержни
поддерживают груз
Определяем
5 аксиома статики
возможные
направления
реакций связей
«жёсткие стержни»
Усилия направлены
вдоль стержней
16.
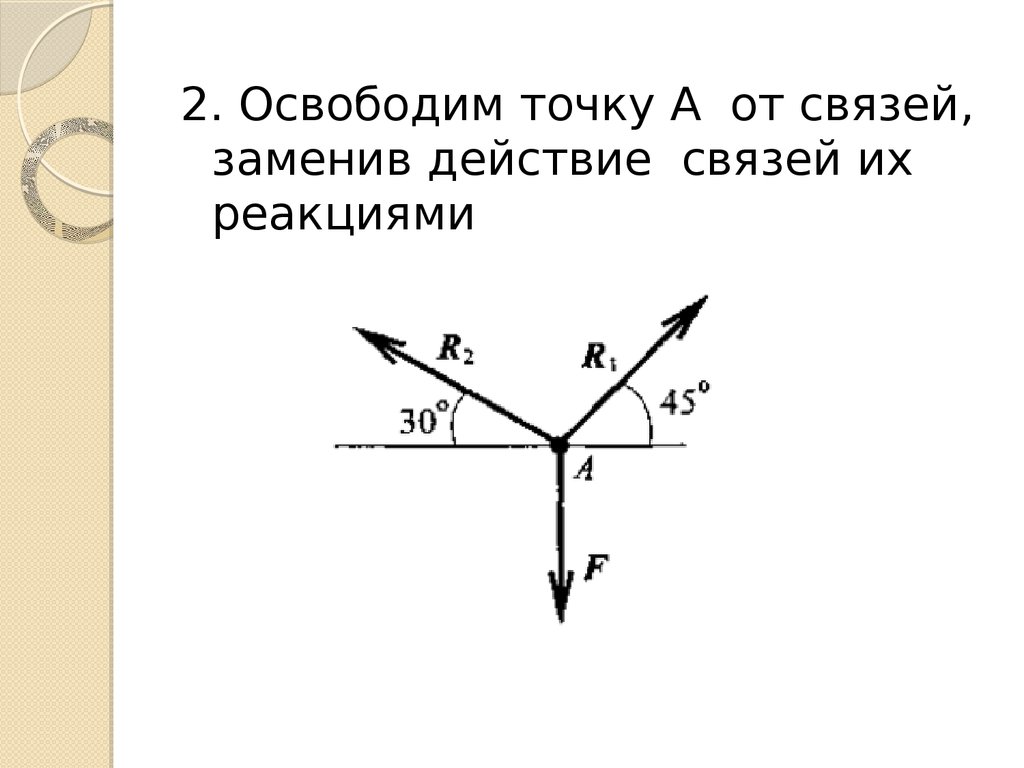
2. Освободим точку А от связей,заменив действие связей их
реакциями
17.
3. Система находится вравновесии. Построим
треугольник сил
Используем
параллельный
перенос
R2
Измеряем длины
F
векторов,
учитывая масштаб
R1
18.
4. Для точности расчётовиспользуем теоремой синусов
Для данного случая
19. Задача 2
Груз подвешен на стержнях иканатах и находится в
равновесии.
Определить усилия в стержнях
20. Решение
1. Определим направления усилий,приложенных в точке А
Реакции стержней вдоль
стержней.
Усилие от каната вдоль каната
от точки А к точке В
21.
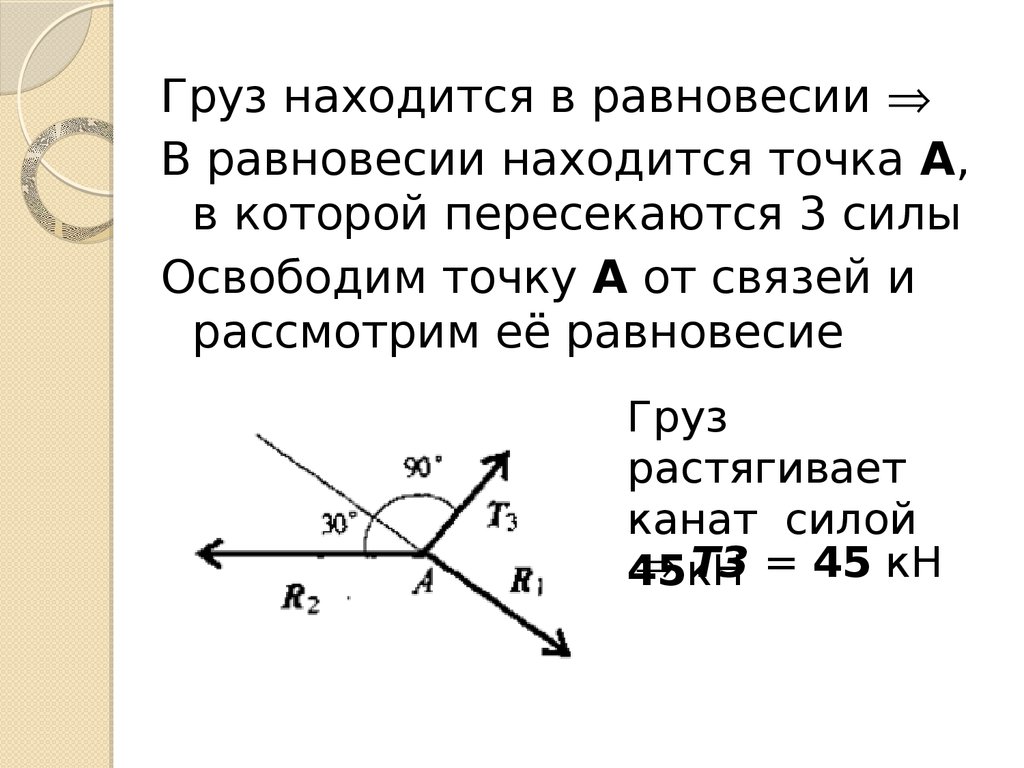
Груз находится в равновесииВ равновесии находится точка А,
в которой пересекаются 3 силы
Освободим точку А от связей и
рассмотрим её равновесие
Груз
растягивает
канат силой
Т3 = 45 кН
45кН
22.
Строим треугольник сил,приложенных к точке А,
начиная с известной T3
Получили прямоугольный
треугольник
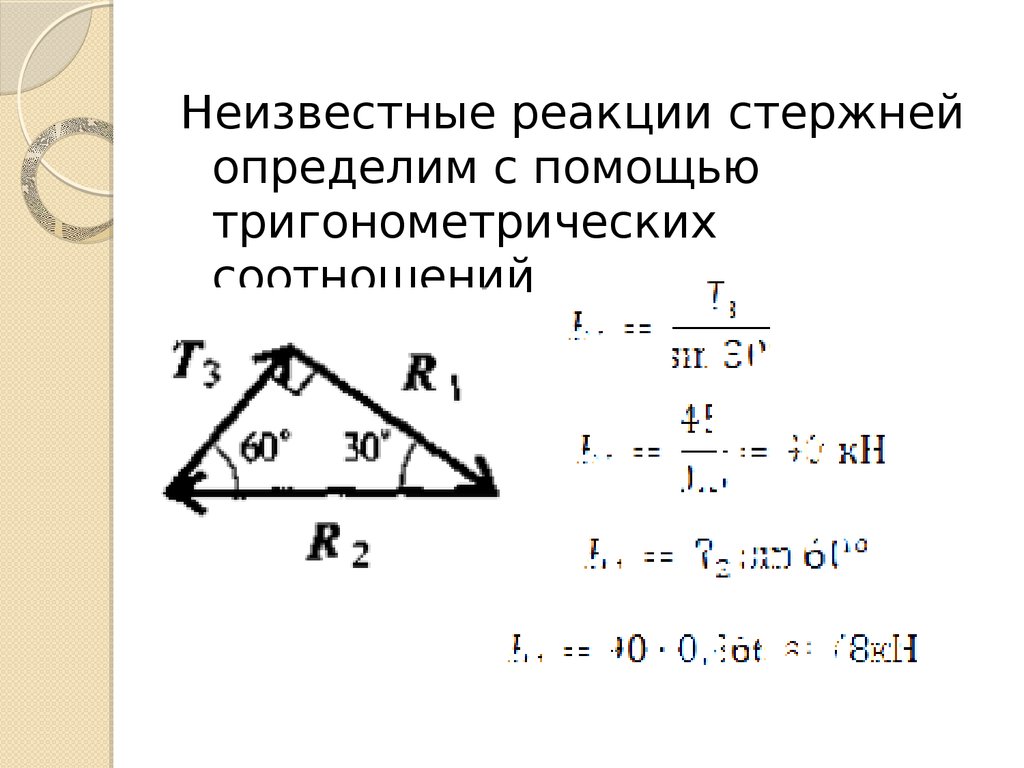
23.
Неизвестные реакции стержнейопределим с помощью
тригонометрических
соотношений
24. Проекция силы на ось
Определяется отрезком оси,отсекаемым
перпендикулярами,
опущенными на ось из начала
и конца вектора
25. Знак проекции
26. Знак проекции
27. Проекция силы на 2 взаимно перпендикулярные оси
28. Определение равнодействующей аналитическим способом
СтатикаОПРЕДЕЛЕНИЕ
РАВНОДЕЙСТВУЮЩЕЙ
АНАЛИТИЧЕСКИМ
СПОСОБОМ
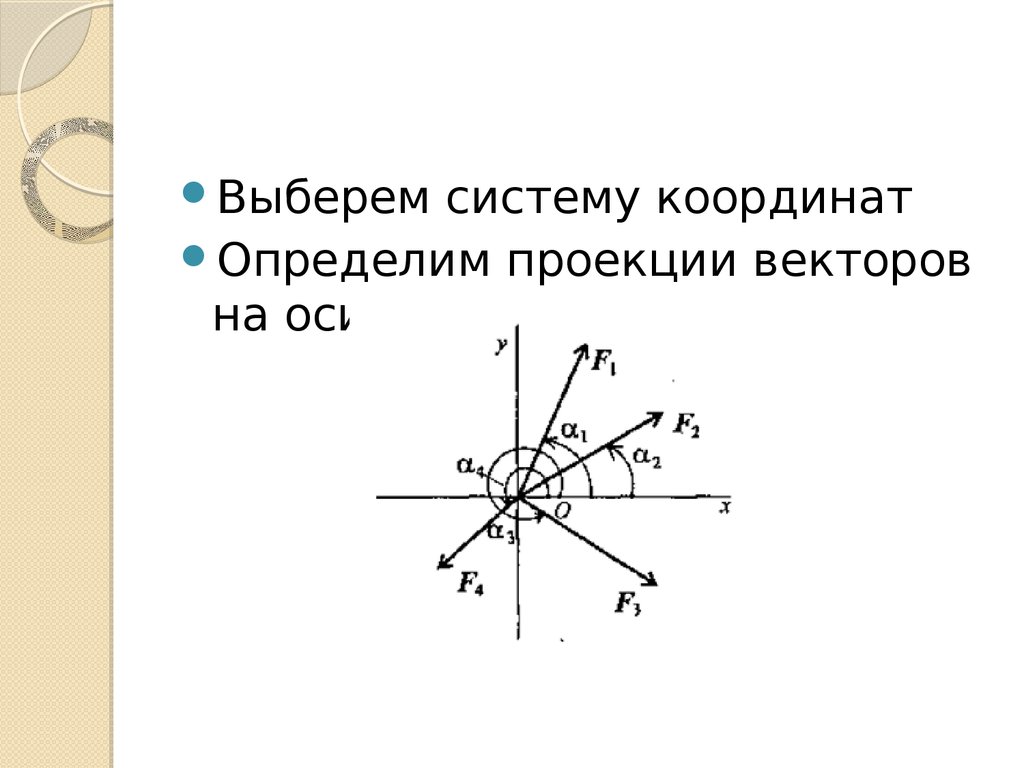
29.
Выберемсистему координат
Определим проекции векторов
на оси
30.
Складываем проекции всехвекторов на оси
31.
Модуль равнодействующейнайдём по теореме Пифагора
Направление равнодействующей
по величинам и знакам
косинусов углов
32.
Тело в равновесииравнодействующая равна нулю
33. Условие равновесия в аналитической форме
Плоская система сходящихсясил находится в равновесии,
если алгебраическая сумма
проекций всех сил системы на
любую ось системы
34. Задача 3
Определить величины и знакипроекций представленных сил
35. Задача 3
Определить величины и знакипроекций представленных сил
36. Задача 4
Определить величину инаправление
равнодействующей плоской
системы сил аналитическим
способом
37. Решение
Проекции сил системы на ось ХПроекция равнодействующей
на ось Х
направле
на
влево
38.
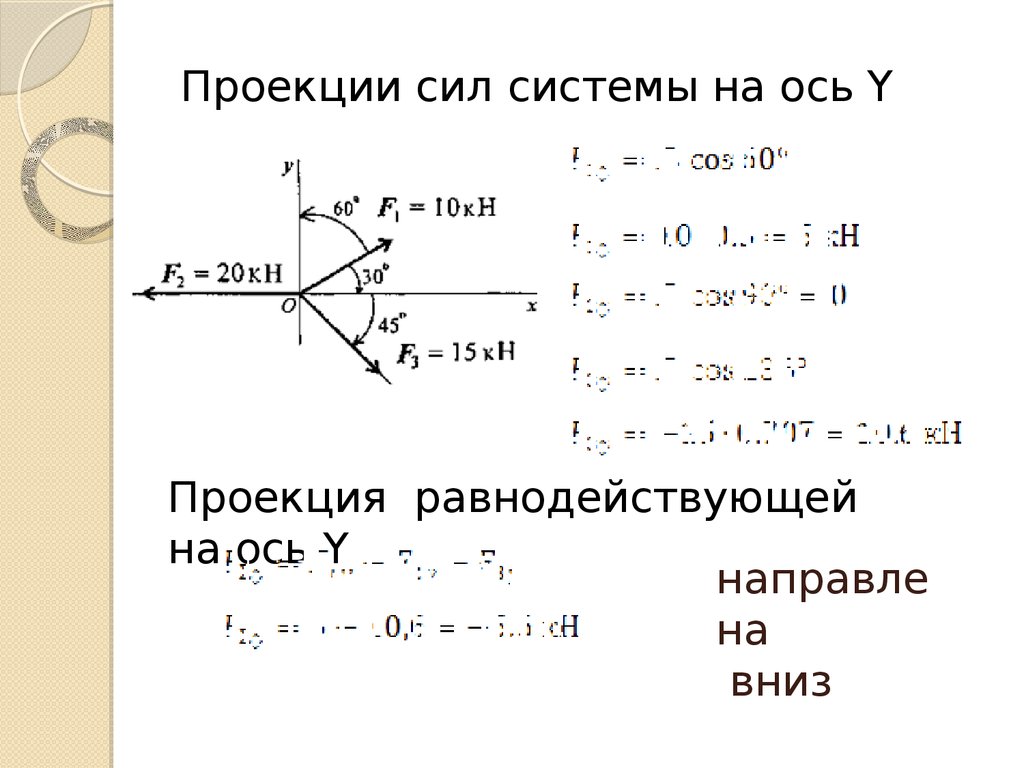
Проекции сил системы на ось YПроекция равнодействующей
на ось Y
направле
на
вниз
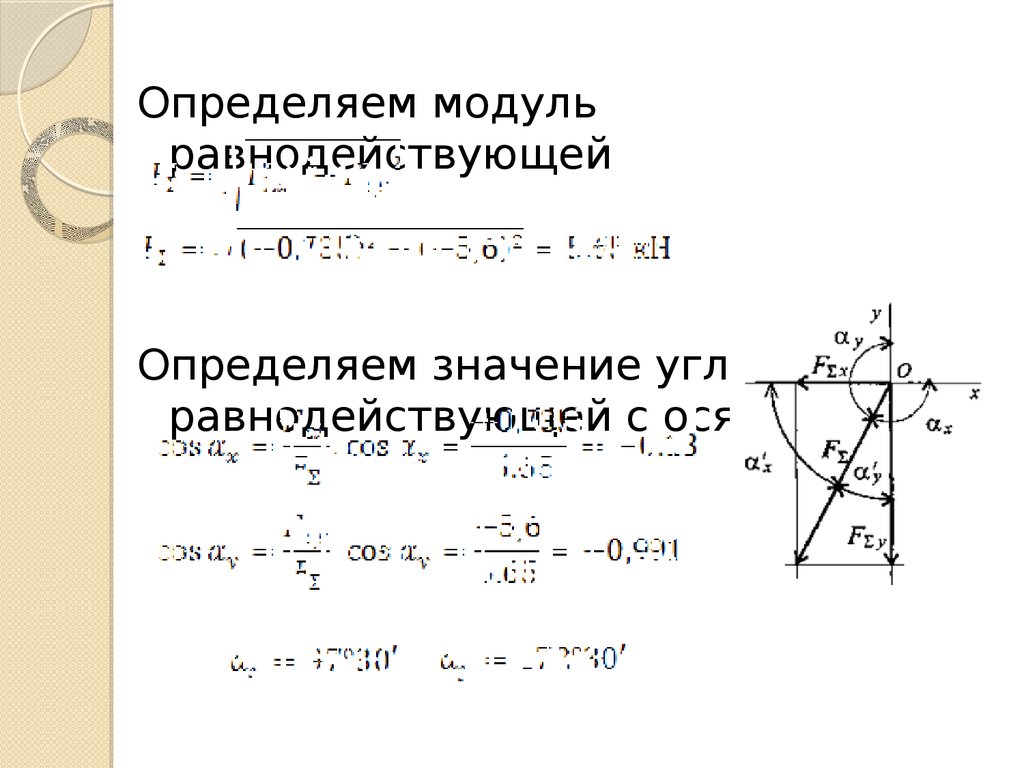
39.
Определяем модульравнодействующей
Определяем значение углов
равнодействующей с осями
40. Задача 5
Система трёх сил находится вравновесии. Известны проекции
двух сил на взаимно
перпендикулярные оси OX и OY
F1x=10 кН
F1y=-2 кН
F 2x =5 кН
F2y=6 кН
Определить, чему равна и как
направлена третья сила системы.