
 physics
physicsSimilar presentations:


")



")



Кинематика точки (продолжение). Лекция 3
1.
А.И. РодионовТеоретическая механика.
Ч.1. КИНЕМАТИКА
2.
Лекция 3.Кинематика точки (продолжение).
§3.1. Основные задачи кинематики
Вычисление скорости и ускорения движения точки
является, по сути, главной задачей кинематики. Однако
различают Прямую или первую и Обратную или вторую
задачи кинематики.
Для точки прямая задача состоит в нахождении
скорости и ускорения по заданному закону движения, а
также, если необходимо, нахождение траектории
движения. Эта задача решается дифференцированием
закона движения.
3.
Обратная задача заключается в определении законадвижения и траектории точки по заданным во времени
скорости или ускорению точки. Эта задача решается
путем их интегрирования. Для решения обратной
задачи необходимо задать начальные условия.
§3.1.1. Вычисление скорости и ускорения при векторном
способе задания движения.
Из физических основ механики следует, что
Скорость точки как физическая величина есть
кинематическая векторная мера, определяющая
быстроту изменения положения точки в пространстве
и численно равная:
ds
dr
(15)
V
r
dt
.
dt
,
4.
Ускорение точки как физическая величина есть втораякинематическая векторная мера, определяющая
быстроту изменения скорости точки в пространстве и
численно равная:
d ds
dV
d 2r
V
r
a
2
dt dt
dt
dt
(16)
§3.1.2. Вычисление скорости и ускорения точки в
декартовых осях.
Вычислим скорость точки в декартовых осях взяв за основу
(2), (3), (15) и (16). Тогда
d r d(x i y j zk)
Vx i Vy j Vz k V
x i y j z k
dt
dt
5.
Таким образом,Vx x , Vy y , Vz z
(17)
2
2
2
2
2
2
V Vx V y Vz x y z
Аналогично получим выражения для компонент ускорения
точки:
dV d(Vx i V y j Vz k )
ax i a y j az k a
dt
dt
V x i V y j V z k x i y j z k
x x , a y V
y y , a z V
z z
ax V
2
2
2
a a x a y a z x 2 y 2 z 2
(18)
6.
§3.1.3. Вычисление скорости точки в естественных осяхВычислим скорость точки в естественных осях на основе (14)
и определения (15). Тогда, с учетом того, что ds τds , получим
dS dS dS
Vi τ Vn n Vbb V
τ S
dt dS dt
V Vτ S
(19)
Vn Vb 0 t
Таким образом, скорость точки всегда касательна к ее
траектории.
7.
§3.1.4.Теорема о производной от единичного вектора попараметру.
Докажем важную для дальнейшего вспомогательную
теорему о производной от единичного вектора по параметру.
Покажем, что она ортогональна самому вектору.
Доказательство:
вектор
пусть есть
единичный
e e ( ), | e | 1 e (e e ) 1
2
2
de
de
de
Вычислим производную:
(e ) 0 e , так как
d
d
d
cos = /2. Что и следовало показать.
8.
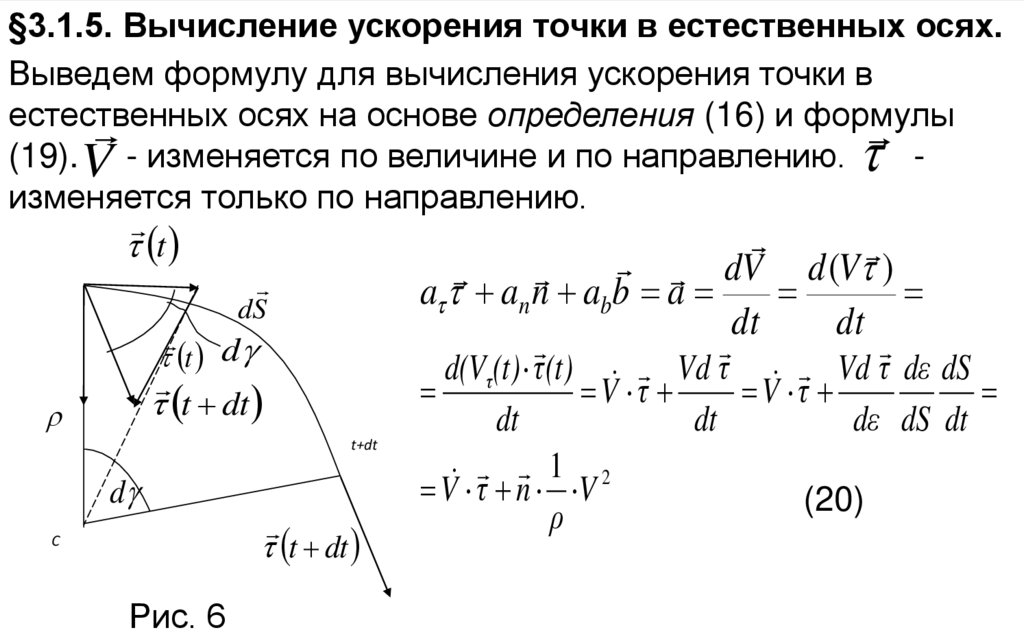
§3.1.5. Вычисление ускорения точки в естественных осях.Выведем формулу для вычисления ускорения точки в
естественных
осях на основе определения (16) и формулы
(19). V - изменяется по величине и по направлению.
изменяется только по направлению.
t
dV d (V )
a an n abb a
dt
dt
dS
t d
t dt
t+dt
d
t dt
С
Рис. 6
d(Vτ(t) τ (t) Vd τ Vd τ dε dS
V τ
V τ
dt
dt
dε dS dt
1 2
V τ n V
(20)
ρ
9.
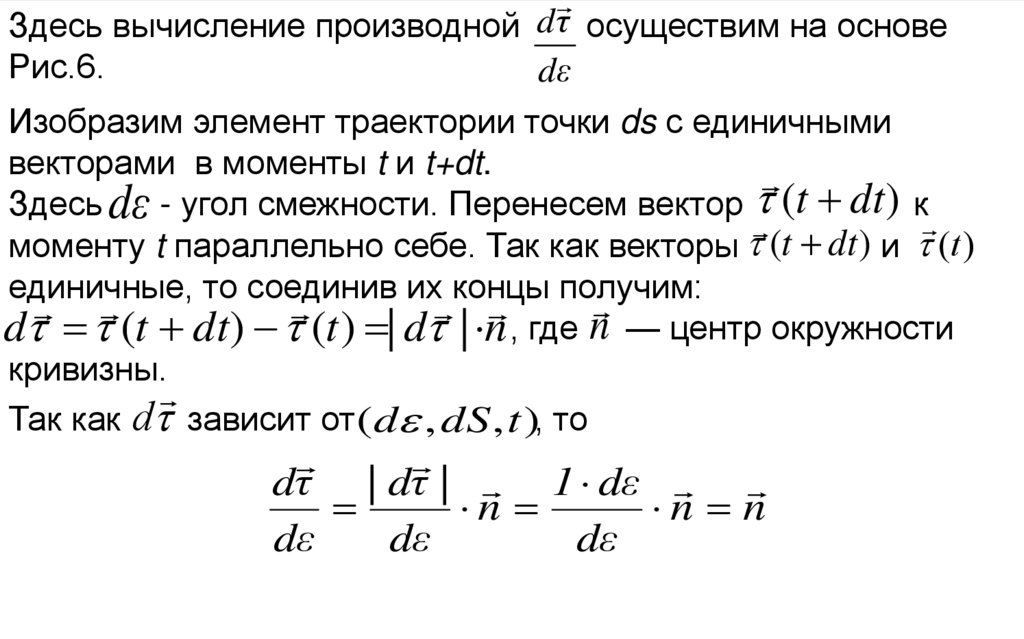
dτ
Здесь вычисление производной
осуществим на основе
Рис.6.
dε
Изобразим элемент траектории точки ds с единичными
векторами в моменты t и t+dt.
Здесь dε - угол смежности. Перенесем вектор (t dt ) к
(
t
dt
)
моменту t параллельно себе. Так как векторы
и (t )
единичные, то соединив их концы получим:
, где n — центр окружности
d (t dt) (t ) | d | n
кривизны.
Так как d зависит от (d , dS , t ), то
dτ | dτ | 1 dε
n
n n
dε
dε
dε
10.
dε 1 (так как ds ρdε , где ρ - радиус окружностиdS ρ
кривизны).
Таким образом,
2
V
a an n abb a V
n
(21)
и вектор ускорения точки всегда лежит в касательной
плоскости и раскладывается на тангенциальное и
нормальное направления.
2
2
| a |
,
at V S
V
S
an
,
ρ
ρ
a an2
V ( ) S
2
2
V2 2
ab 0.
2
S 2 2 (22)
( )
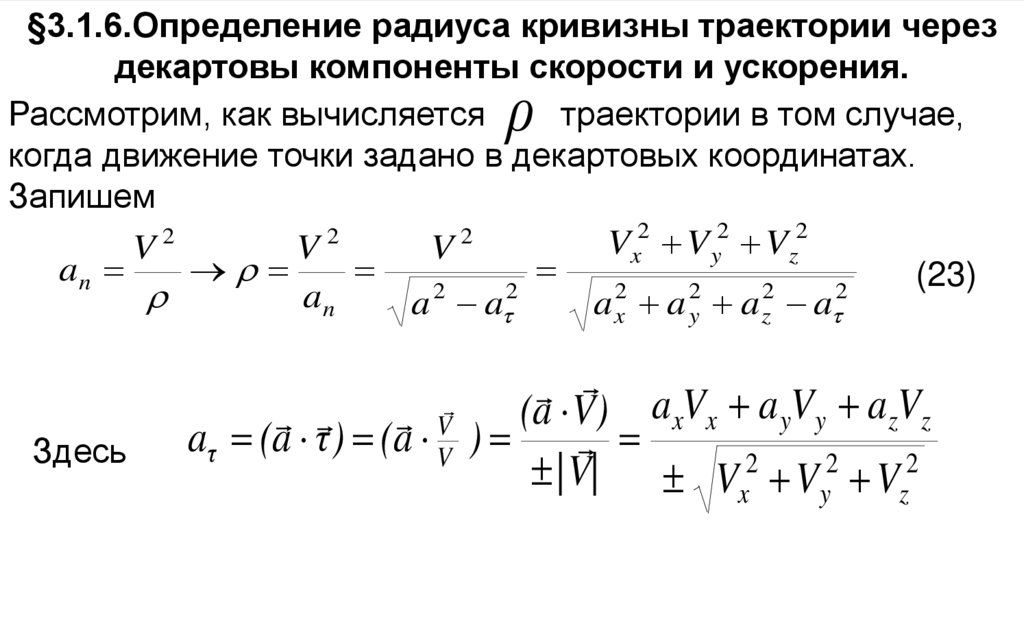
11.
§3.1.6.Определение радиуса кривизны траектории черездекартовы компоненты скорости и ускорения.
Рассмотрим, как вычисляется
траектории в том случае,
когда движение точки задано в декартовых координатах.
Запишем
2
2
2
2
2
2
V
V
V
V
V
V
x
y
z
an
(23)
2
2
2
2
2
2
an
a a
a x a y a z a
ρ
Здесь
(a V) axVx a yVy azVz
V
aτ (a τ ) (a V )
|V| Vx2 Vy2 Vz2