
 physics
physicsSimilar presentations:






")



Работа, мощность силы. Кинетическая и потенциальная энергия
1.
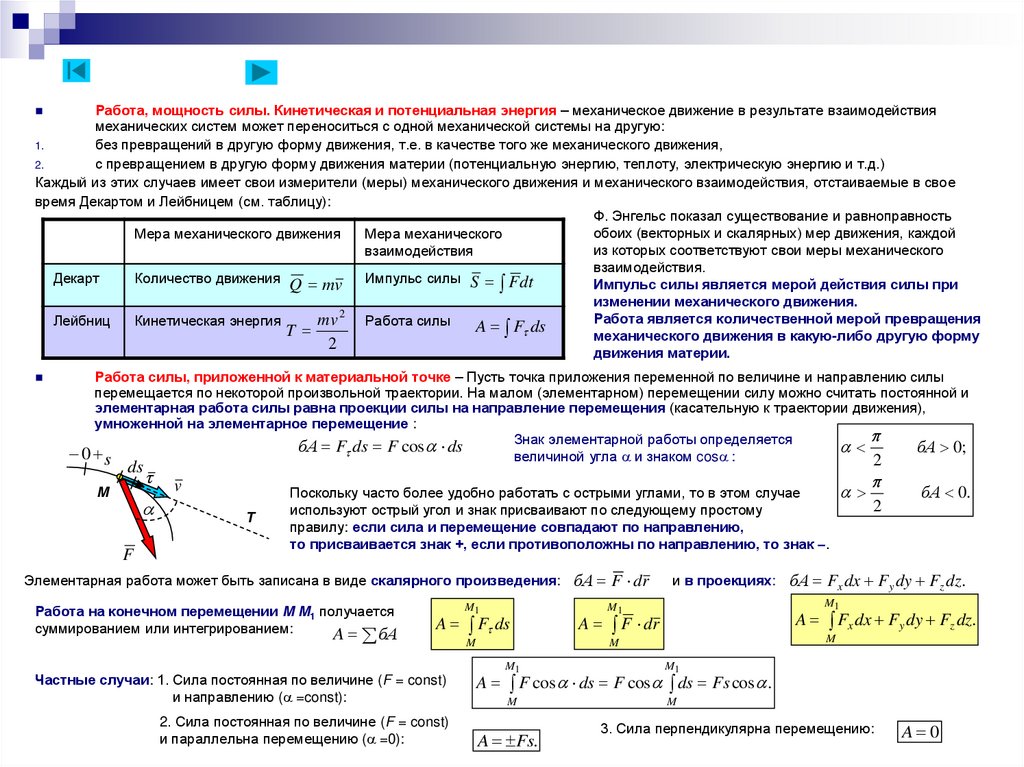
Работа, мощность силы. Кинетическая и потенциальная энергия – механическое движение в результате взаимодействиямеханических систем может переноситься с одной механической системы на другую:
1.
без превращений в другую форму движения, т.е. в качестве того же механического движения,
2.
с превращением в другую форму движения материи (потенциальную энергию, теплоту, электрическую энергию и т.д.)
Каждый из этих случаев имеет свои измерители (меры) механического движения и механического взаимодействия, отстаиваемые в свое
время Декартом и Лейбницем (см. таблицу):
Ф. Энгельс показал существование и равноправность
обоих (векторных и скалярных) мер движения, каждой
Мера механического движения
Мера механического
из которых соответствуют свои меры механического
взаимодействия
взаимодействия.
Декарт
Количество движения Q mv
Импульс силы S F dt
Импульс силы является мерой действия силы при
изменении механического движения.
Работа является количественной мерой превращения
mv 2 Работа силы
Лейбниц
Кинетическая энергия
A F ds
T
механического движения в какую-либо другую форму
2
движения материи.
Работа силы, приложенной к материальной точке – Пусть точка приложения переменной по величине и направлению силы
перемещается по некоторой произвольной траектории. На малом (элементарном) перемещении силу можно считать постоянной и
элементарная работа силы равна проекции силы на направление перемещения (касательную к траектории движения),
умноженной на элементарное перемещение :
Знак элементарной работы определяется
бA F ds F cos ds
бA 0;
0 s
величиной угла и знаком cos :
2
ds
M
F
v
T
Поскольку часто более удобно работать с острыми углами, то в этом случае
2
используют острый угол и знак присваивают по следующему простому
правилу: если сила и перемещение совпадают по направлению,
то присваивается знак +, если противоположны по направлению, то знак .
Элементарная работа может быть записана в виде скалярного произведения: бA F dr
Работа на конечном перемещении M M1 получается
суммированием или интегрированием:
A бA
M1
A F dr
M
M
Частные случаи: 1. Сила постоянная по величине (F = const)
и направлению ( =const):
2. Сила постоянная по величине (F = const)
и параллельна перемещению ( =0):
и в проекциях: бA Fx dx Fy dy Fz dz.
M1
M1
A F ds
бA 0.
A Fx dx Fy dy Fz dz.
M
M1
M1
M
M
A F cos ds F cos ds Fs cos .
A Fs.
3. Сила перпендикулярна перемещению:
A 0
2.
Можно доказать следующие теоремы и утверждения:Работа равнодействующей на некотором перемещении равна алгебраической сумме работ составляющих сил на
M1
M1
M1
M1
том же перемещении:
A Ai
A R dr ( F1 F2 ...) dr F1 dr F2 dr ... A1 A1 ... Ai
M
M
M
M
■
Работа постоянной сил по величине и направлению на составном перемещении равна алгебраической сумме работ этой силы
на каждом из составляющих перемещений:
A Asi
A F s F ( s1 s 2 ...) F s1 F s 2 ... As1 As 2 ... Asi
Ai 0
M1
M1
A ( R R ) dr ( R R ) dr 0;
■
Работа внутренних сил неизменяемой системы равна нулю:
■
Работа силы тяжести не зависит от вида траектории и равна произведению силы тяжести на разность высот:
i
'
M
M1
M1
M
M
M
( R ' R ).
A G( z1 z)
A Gx dx G y dy Gz dz ( G )dz Gz z1 G ( z1 z ); (Gx G y 0, Gz -G)
■
Работа линейной силы упругости (реакции пружины)
при перемещении из состояния равновесия:
z
A c
Δx
.
2
2
M1
M1
x1
x2
x12
A Rx dx ( cx)dx c
c ; ( Rx cx)
2 x 0
2
M
M
Работа силы, приложенной к твердому телу, вращающемуся вокруг неподвижной оси. Запишем выражение для
элементарной работы силы, приложенной к точке, и выразим элементарное перемещение через угол поворота тела:
z
бA F ds F cos ds F cos R d
бA Fh d M z ( F )d .
ω
R
h
F
d
ds
R
F
-работа силы, приложенной
к вращающемуся твердому
телу, выражается через
момент силы относительно
оси.
h
Работа силы, приложенной к вращающемуся твердому телу,
для конечного угла поворота:
A M z ( F )d .
В частном случае постоянного значения момента силы относительно оси
работа равна произведению момента силы на угол поворота:
A M z ( F )( 1 ).
1
Мощность – величина, характеризуемая количеством работы, произведенной в единицу времени:
T
A
F ds
N
F v F v .
dt
dt
Мощность силы, приложенной к точке:
Мощность силы, приложенной к вращающемуся твердому телу:
N
A
dt
M z d
M z z M .
dt
N
A
dt
.
3.
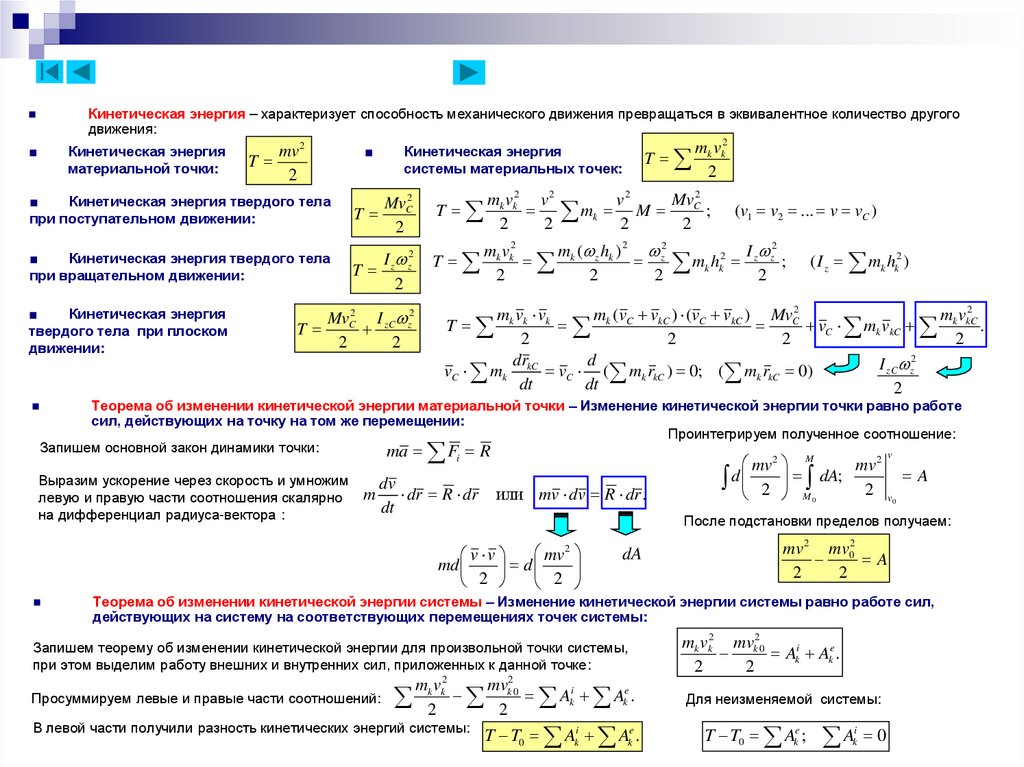
Кинетическая энергия – характеризует способность механического движения превращаться в эквивалентное количество другогодвижения:
■
Кинетическая энергия
материальной точки:
mv2
T
2
■
Кинетическая энергия
системы материальных точек:
■
Кинетическая энергия твердого тела
при поступательном движении:
MvC2
T
2
■
Кинетическая энергия твердого тела
при вращательном движении:
I 2
T z z
2
■
Кинетическая энергия
твердого тела при плоском
движении:
T
MvC2 I zC z2
2
2
T
mk vk2
2
mk vk2 v 2
MvC2
v2
T
mk M
;
2
2
2
2
(v1 v2 ... v vC )
mk vk2
mk ( z hk ) 2 z2
I z z2
2
T
mk hk 2 ;
2
2
2
( I z mk hk2 )
mk vk vk
m (v v ) (vC vkC ) MvC2
m v2
k C kC
vC mk vkC k kC .
2
2
2
2
2
dr
d
I zC z
vC mk kC vC ( mk rkC ) 0; ( mk rkC 0)
dt
dt
2
T
Теорема об изменении кинетической энергии материальной точки – Изменение кинетической энергии точки равно работе
сил, действующих на точку на том же перемещении:
Проинтегрируем полученное соотношение:
Запишем основной закон динамики точки:
ma F R
v
i
Выразим ускорение через скорость и умножим
dv
dr R dr
левую и правую части соотношения скалярно m
dt
на дифференциал радиуса-вектора :
или mv dv R dr .
После подстановки пределов получаем:
mv2
v v
md
d
2
2
mv2 M
mv2
d
dA
;
A
2 M
2
v0
0
dA
mv 2 mv02
A
2
2
Теорема об изменении кинетической энергии системы – Изменение кинетической энергии системы равно работе сил,
действующих на систему на соответствующих перемещениях точек системы:
Запишем теорему об изменении кинетической энергии для произвольной точки системы,
при этом выделим работу внешних и внутренних сил, приложенных к данной точке:
mk vk2 mvk20
Aki Ake .
2
2
mk vk2
mvk20
Aki Ake .
Просуммируем левые и правые части соотношений:
2
2
Для неизменяемой системы:
В левой части получили разность кинетических энергий системы:
T T0 Aki Ake .
T T0 Ake ;
A 0
i
k
4.
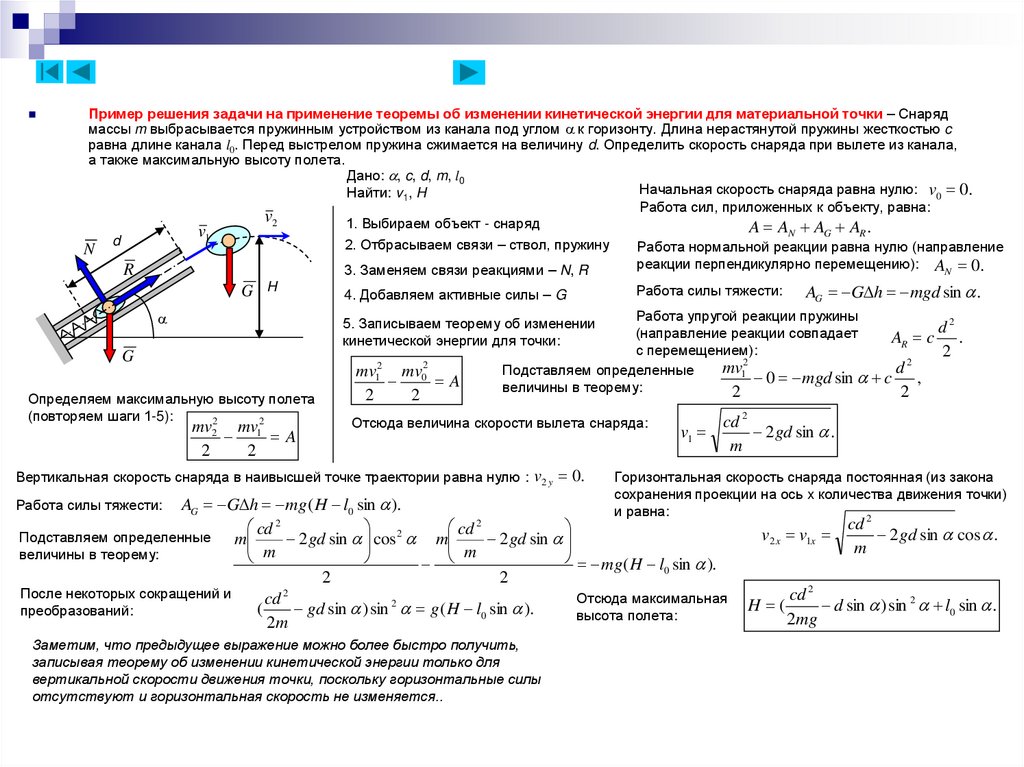
Пример решения задачи на применение теоремы об изменении кинетической энергии для материальной точки – Снарядмассы m выбрасывается пружинным устройством из канала под углом к горизонту. Длина нерастянутой пружины жесткостью c
равна длине канала l0. Перед выстрелом пружина сжимается на величину d. Определить скорость снаряда при вылете из канала,
а также максимальную высоту полета.
Дано: , c, d, m, l0
Начальная скорость снаряда равна нулю: v0 0.
Найти: v1, H
Работа сил, приложенных к объекту, равна:
v2
1. Выбираем объект - снаряд
A AN AG AR .
v1
d
2.
Отбрасываем связи – ствол, пружину
Работа нормальной реакции равна нулю (направление
N
реакции перпендикулярно перемещению): AN 0.
R
3. Заменяем связи реакциями – N, R
G H
4. Добавляем активные силы – G
Работа силы тяжести:
AG G h mgd sin .
Работа упругой реакции пружины
d2
(направление реакции совпадает
AR c .
с перемещением):
2
2
2
mv
d
Подставляем определенные
1
0 mgd sin c ,
величины в теорему:
2
2
5. Записываем теорему об изменении
кинетической энергии для точки:
G
Определяем максимальную высоту полета
(повторяем шаги 1-5):
2
2
mv2 mv1
A
2
2
mv12 mv02
A
2
2
Отсюда величина скорости вылета снаряда:
Вертикальная скорость снаряда в наивысшей точке траектории равна нулю : v2 y 0.
v1
cd 2
2 gd sin .
m
Горизонтальная скорость снаряда постоянная (из закона
сохранения проекции на ось x количества движения точки)
и равна:
2
AG G h mg ( H l0 sin ).
cd 2
cd 2
Подставляем определенные
m
2 gd sin cos 2 m
2 gd sin
m
величины в теорему:
m
mg ( H l sin ).
0
2
2
После некоторых сокращений и
Отсюда максимальная
cd 2
(
gd sin ) sin 2 g ( H l0 sin ).
преобразований:
высота полета:
2m
Работа силы тяжести:
Заметим, что предыдущее выражение можно более быстро получить,
записывая теорему об изменении кинетической энергии только для
вертикальной скорости движения точки, поскольку горизонтальные силы
отсутствуют и горизонтальная скорость не изменяется..
v2 x v1x
H (
cd
2 gd sin cos .
m
cd 2
d sin ) sin 2 l0 sin .
2mg
5.
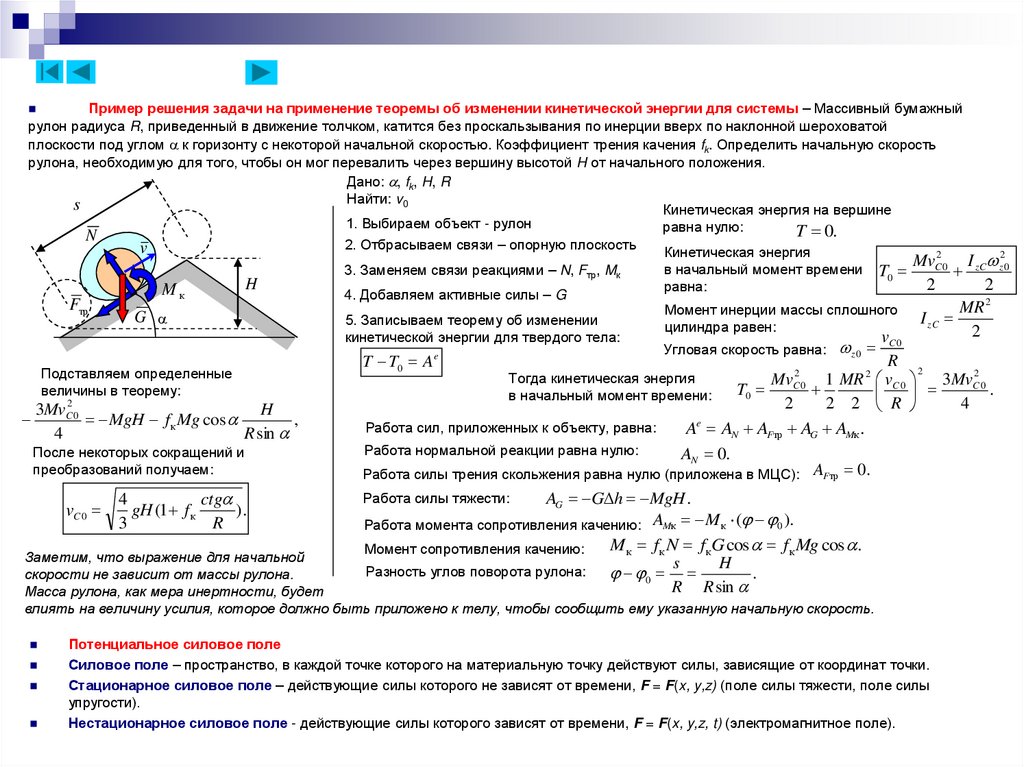
Пример решения задачи на применение теоремы об изменении кинетической энергии для системы – Массивный бумажныйрулон радиуса R, приведенный в движение толчком, катится без проскальзывания по инерции вверх по наклонной шероховатой
плоскости под углом к горизонту с некоторой начальной скоростью. Коэффициент трения качения fk. Определить начальную скорость
рулона, необходимую для того, чтобы он мог перевалить через вершину высотой H от начального положения.
Дано: , fk, H, R
Найти: v0
s
Кинетическая энергия на вершине
1. Выбираем объект - рулон
равна нулю:
T 0.
N
2.
Отбрасываем
связи
–
опорную
плоскость
v
Кинетическая энергия
MvC2 0 I zC z20
в начальный момент времени T0
3. Заменяем связи реакциями – N, Fтр, Mк
H
2
2
равна:
Mк
4. Добавляем активные силы – G
Fтр
MR 2
Момент инерции массы сплошного
G
I
5. Записываем теорему об изменении
zC
цилиндра равен:
2
кинетической энергии для твердого тела:
vC 0
Угловая
скорость
равна:
z
0
e
Подставляем определенные
величины в теорему:
3MvC2 0
H
MgH f к Mg cos
,
4
R sin
После некоторых сокращений и
преобразований получаем:
vC 0
4
ctg
gH (1 f к
).
3
R
T T0 A
Тогда кинетическая энергия
в начальный момент времени:
R 2
MvC2 0 1 MR 2 vC 0
3MvC2 0
T0
.
2
2 2 R
4
Ae AN AFтр AG AMк .
Работа нормальной реакции равна нулю:
AN 0.
Работа силы трения скольжения равна нулю (приложена в МЦС): AFтр 0.
Работа сил, приложенных к объекту, равна:
AG G h MgH .
Работа момента сопротивления качению: AMк M к ( 0 ).
M к f к N f кG cos f к Mg cos .
Момент сопротивления качению:
s
H
Разность углов поворота рулона:
0
.
R R sin
Работа силы тяжести:
Заметим, что выражение для начальной
скорости не зависит от массы рулона.
Масса рулона, как мера инертности, будет
влиять на величину усилия, которое должно быть приложено к телу, чтобы сообщить ему указанную начальную скорость.
Потенциальное силовое поле
Силовое поле – пространство, в каждой точке которого на материальную точку действуют силы, зависящие от координат точки.
Стационарное силовое поле – действующие силы которого не зависят от времени, F = F(x, y,z) (поле силы тяжести, поле силы
упругости).
Нестационарное силовое поле - действующие силы которого зависят от времени, F = F(x, y,z, t) (электромагнитное поле).