
- изменения состояния, обладающие той или иной степенью повторяемости во времени.")








































 physics
physicsSimilar presentations:










Физика колебаний и волн
1.
Национальный исследовательскийТомский политехнический университет
Кафедра теоретической и
экспериментальной физики
ПОСТНИКОВА ЕКАТЕРИНА ИВАНОВНА
кандидат педагогических наук, доцент
11.01.2023
900igr.net
1
2. Физика колебаний и волн
ФИЗИКАКОЛЕБАНИЙ
И ВОЛН
11.01.2023
2
3. Колебания (колебательные движения)- изменения состояния, обладающие той или иной степенью повторяемости во времени.
Гармонические колебанияКолебания (колебательные движения)изменения состояния, обладающие той или
иной степенью повторяемости во времени.
Колебания могут иметь различную физическую
природу.
Колебания различают:
•по характеру физических процессов
•по характеру зависимости от времени.
4.
По характеруфизических процессов:
Механические
колебания маятников, струн,
частей машин и механизмов,
сооружений, волнение жидкостей
По характеру
зависимости от
времени:
Электромагнитные
колебания переменного
электрического поля в цепи,
колебания векторов Е и В
Электромеханические
колебания мембраны телефона,
диффузора электродинамика
Периодические
Непериодические
5.
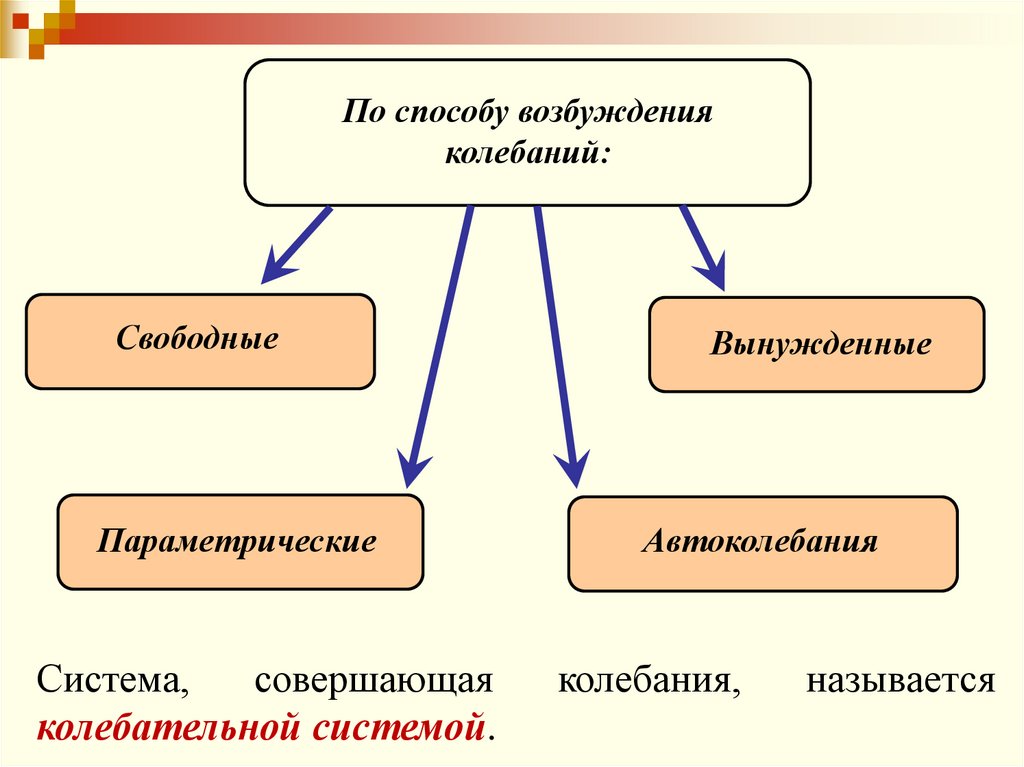
По способу возбужденияколебаний:
Свободные
Параметрические
Система,
совершающая
колебательной системой.
Вынужденные
Автоколебания
колебания,
называется
6.
Колебания называются периодическими, еслизначения физических величин, изменяющихся
в процессе колебаний, повторяются через
равные промежутки времени.
Периодические процессы можно представить
как наложение гармонических колебаний.
Гармонические колебания – колебания, при
которых колеблющаяся величина изменяется со
временем по закону синуса или косинуса.
7.
Периодом колебаний (Т) называетсянаименьший промежуток времени, через
который повторяются значения всех физических
величин, характеризующих колебательное
движение.
Частота периодических колебаний – число
полных колебаний, совершаемых в единицу
времени:
1
T
8. Механические гармонические колебания
Рассмотрим прямолинейные гармонические колебанияматериальной точки вдоль оси х около положения
равновесия, совпадающего с началом координат х = 0.
Зависимость координаты х от времени t задается
уравнением
0
x A cos( t )
А – максимальное значение колеблющейся величины, называется
амплитудой колебаний, ω – круговая (циклическая) частота,
t 0 – фаза колебаний в момент времени t.
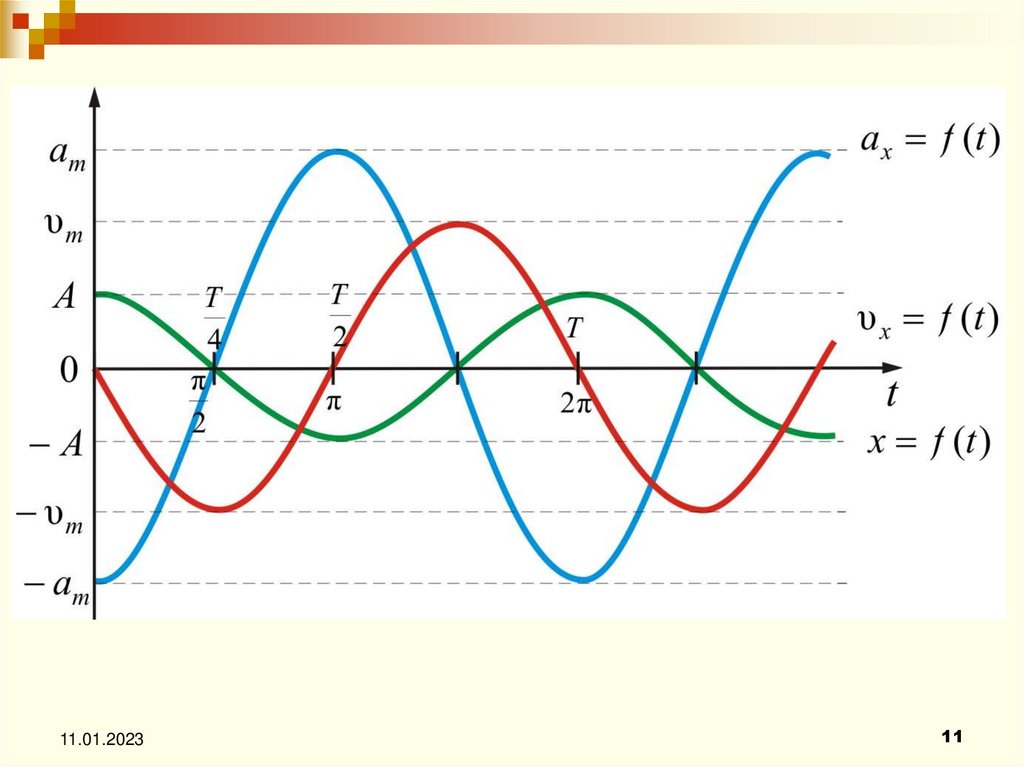
9.
Скорость колеблющейся точки меняется позакону:
dx
A sin( t 0 )
dt
A cos( t 0 )
2
10.
Ускорение:d
2
a
A cos( t 0 )
dt
A cos( t 0 )
2
11.
11.01.202311
12.
Сила, действующая на точку массой m:F ma m x
2
Отсюда:
модуль силы пропорционален смещению
материальной точки из положения
равновесия;
направления силы и смещения
противоположны.
13.
Следовательно, сила всегда направлена кположению равновесия.
Такие силы называют возвращающими.
Зависимость F ma m 2 x характерна для
упругой силы.
Силы другой физической природы,
удовлетворяющие тому же виду зависимости,
называют квазиупругими.
14.
Кинетическая энергия материальнойточки, совершающей гармонические
колебания:
m
m A
2
Ек
sin t 0
2
2
2
2
2
m A
1 cos2 t 0 .
4
2
2
15.
Потенциальная энергия материальнойточки, совершающей гармонические колебания
под действием упругой силы F:
m x
Е p Fdx
2
0
2
2
m A
2
cos t 0
2
x
2
2
m A
1 cos2 t 0 .
4
2
2
16.
Полная энергия:m A
E Ек Е p
2
2
k A
const ,
2
2
где
k m .
2
2
17.
11.01.202317
18.
Гармонический осцилляторОсциллятор – система, совершающая
свободные колебания.
Свободные (собственные) колебания совершаются за
счет первоначально сообщенной энергии при
последующем отсутствии внешнего воздействия на
колебательную систему.
Классический осциллятор – механическая
система, совершающая колебания около
положения устойчивого равновесия (например,
пружинный маятник).
19.
Дифференциальное уравнение гармоническогоосциллятора
x x 0
2
Решение этого уравнения:
x A cos t 0
Здесь x – колеблющаяся величина.
20.
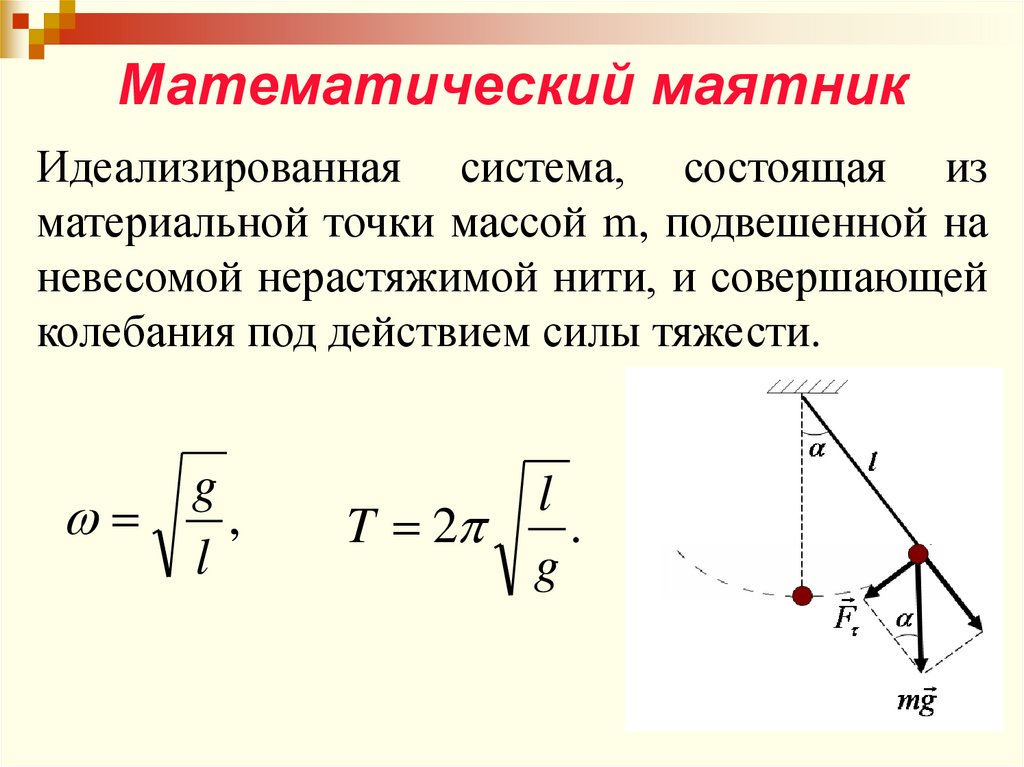
Математический маятникИдеализированная система, состоящая из
материальной точки массой m, подвешенной на
невесомой нерастяжимой нити, и совершающей
колебания под действием силы тяжести.
g
,
l
l
T 2
.
g
21.
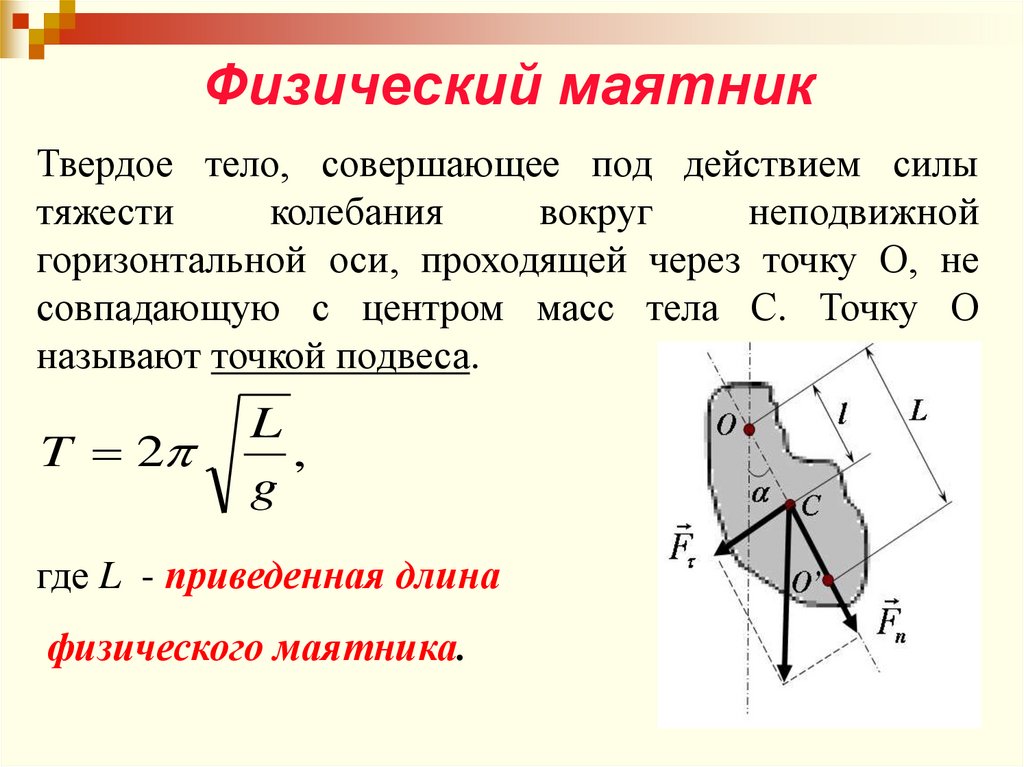
Физический маятникТвердое тело, совершающее под действием силы
тяжести
колебания
вокруг
неподвижной
горизонтальной оси, проходящей через точку О, не
совпадающую с центром масс тела С. Точку О
называют точкой подвеса.
T 2
L
,
g
где L - приведенная длина
физического маятника.
22.
Приведенная длина физического маятника –это длина такого математического маятника,
период колебаний которого совпадает с
периодом колебаний данного физического
маятника.
J
L ,
ml
J – момент инерции маятника относительно оси,
проходящей через точку подвеса.
23.
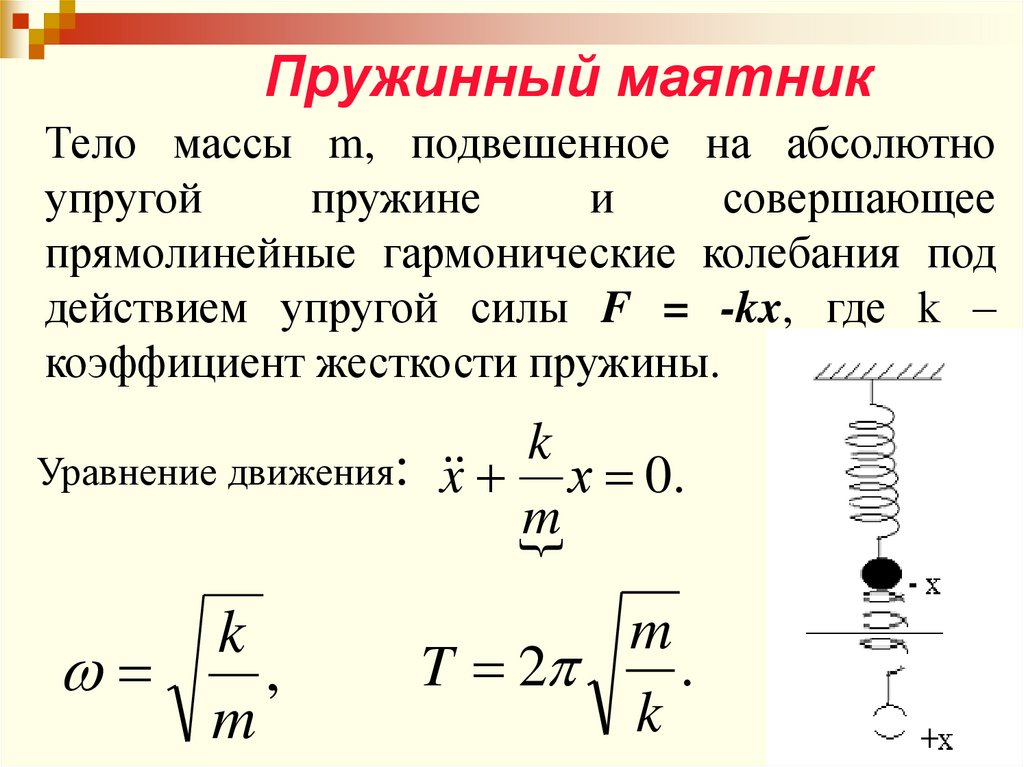
Пружинный маятникТело массы m, подвешенное на абсолютно
упругой
пружине
и
совершающее
прямолинейные гармонические колебания под
действием упругой силы F = -kx, где k –
коэффициент жесткости пружины.
k
Уравнение движения: x
х 0.
m
k
,
m
m
T 2
.
k
24.
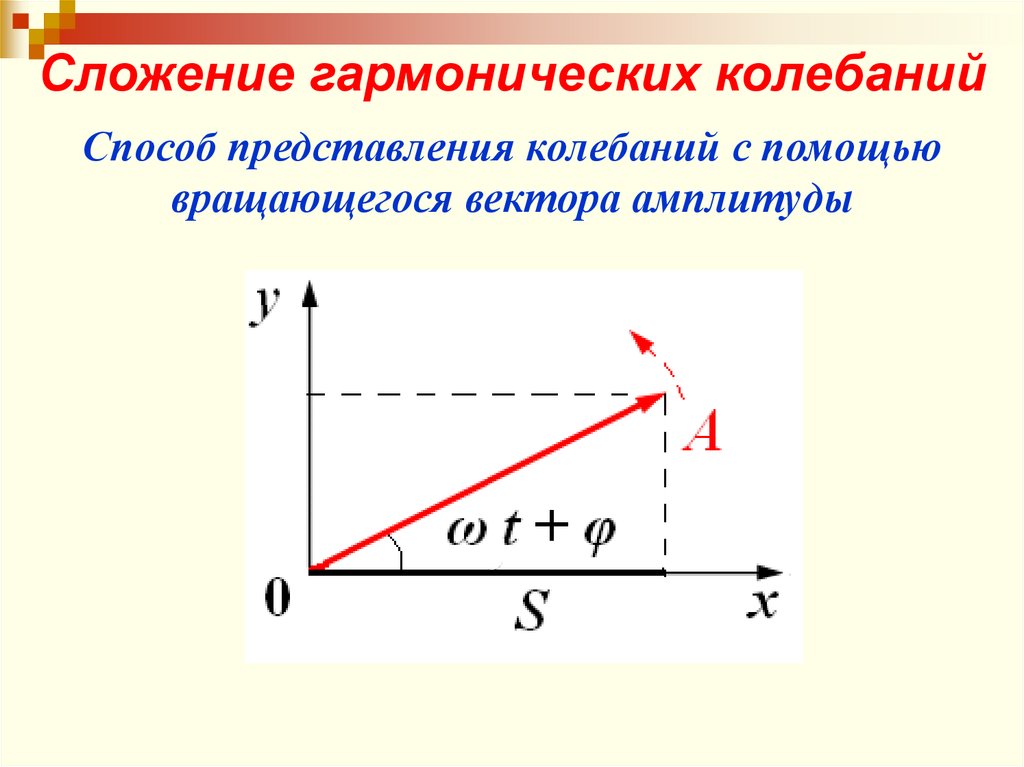
Сложение гармонических колебанийСпособ представления колебаний с помощью
вращающегося вектора амплитуды
25.
x A cos( ωt φ 0 )11.01.2023
x0 A cos φ 0
25
26.
Сложение двух одинаковонаправленных колебаний
Сложение гармонических колебаний
одного направления и одинаковой
частоты
x1 A1 cos( t 1 )
x2 A2 cos( t 2 )
Разность фаз этих колебаний не зависит от
времени t, т.е. (φ1 – φ2) = const, такие колебания
называются когерентными
27.
Aφ2 – φ1
A2
φ2
φ
A1
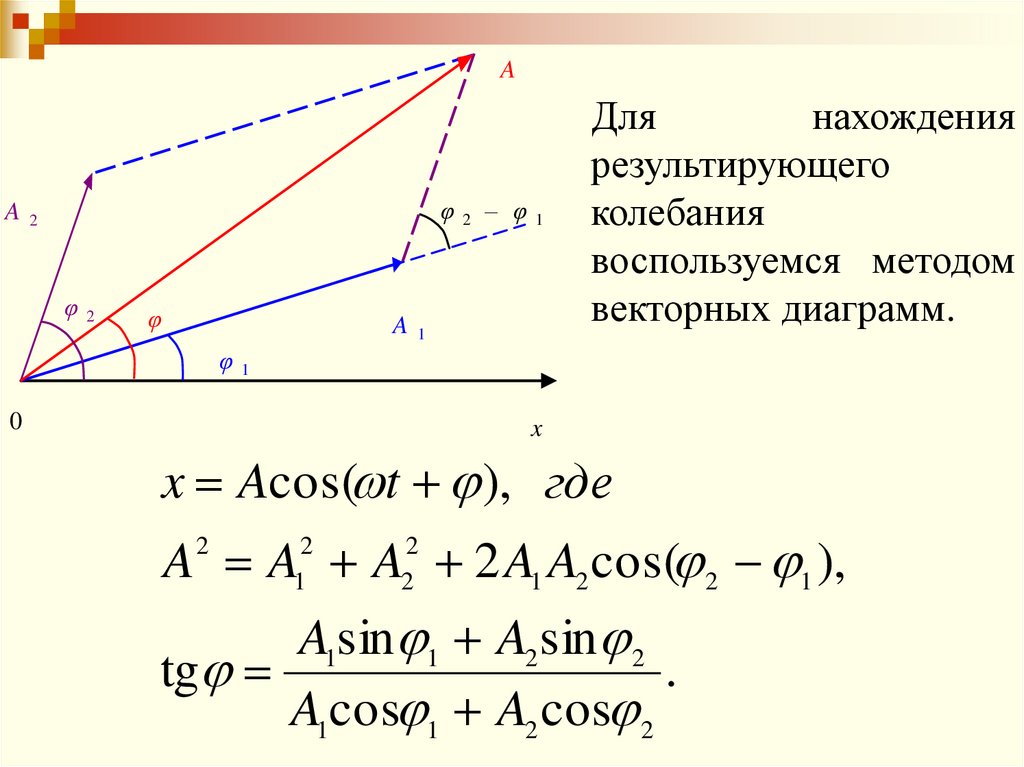
Для
нахождения
результирующего
колебания
воспользуемся методом
векторных диаграмм.
φ1
0
x
x Acos( t ), где
A A A 2 A1 A2 cos( 2 1 ),
2
2
1
2
2
A1sin 1 A2 sin 2
tg
.
A1cos 1 A2 cos 2
28.
Если колебания синфазны:φ2 – φ1 = ±2mπ,
следовательно, А = А1 + А2, происходит усиление
результирующего колебания.
Если колебания в противофазе: φ2 – φ1 = ±(2m +1)π,
следовательно, А = |А1 – А2|, происходит ослабление
результирующего колебания.
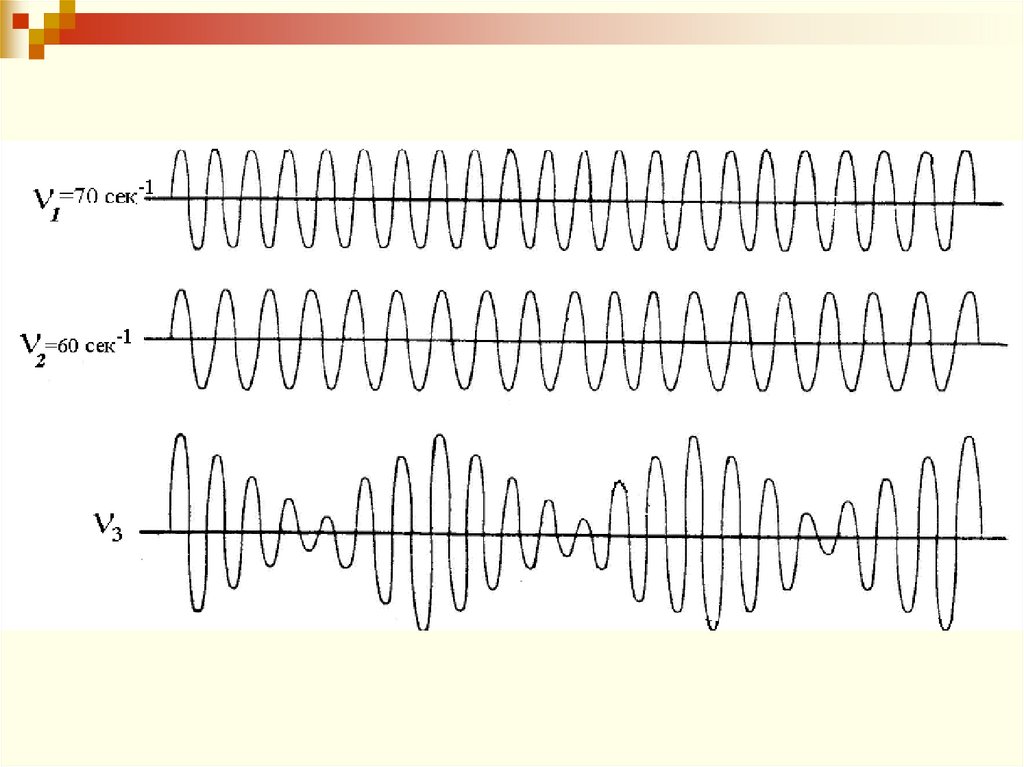
Некогерентные колебания: ω1 ≠ ω2, т.е. разность
фаз колебаний
(ω1 + φ1 – ω2 – φ2) ≠ const и изменяется с течением
времени t.
При наложении таких колебаний получаются
негармоническое результирующее колебание.
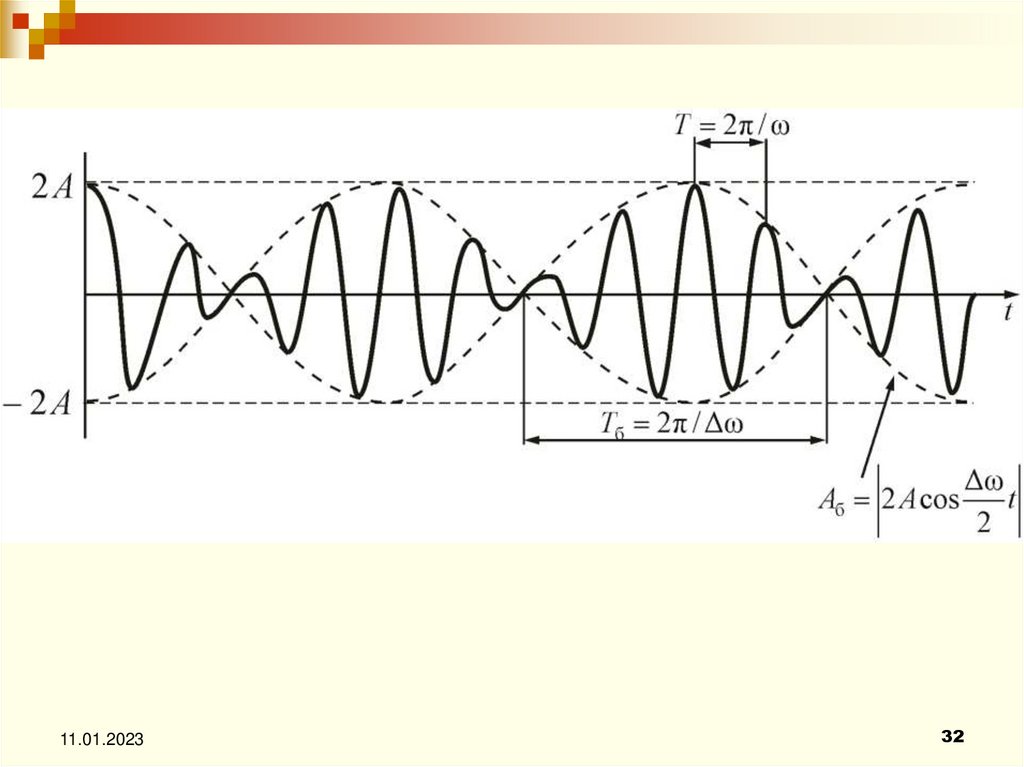
29.
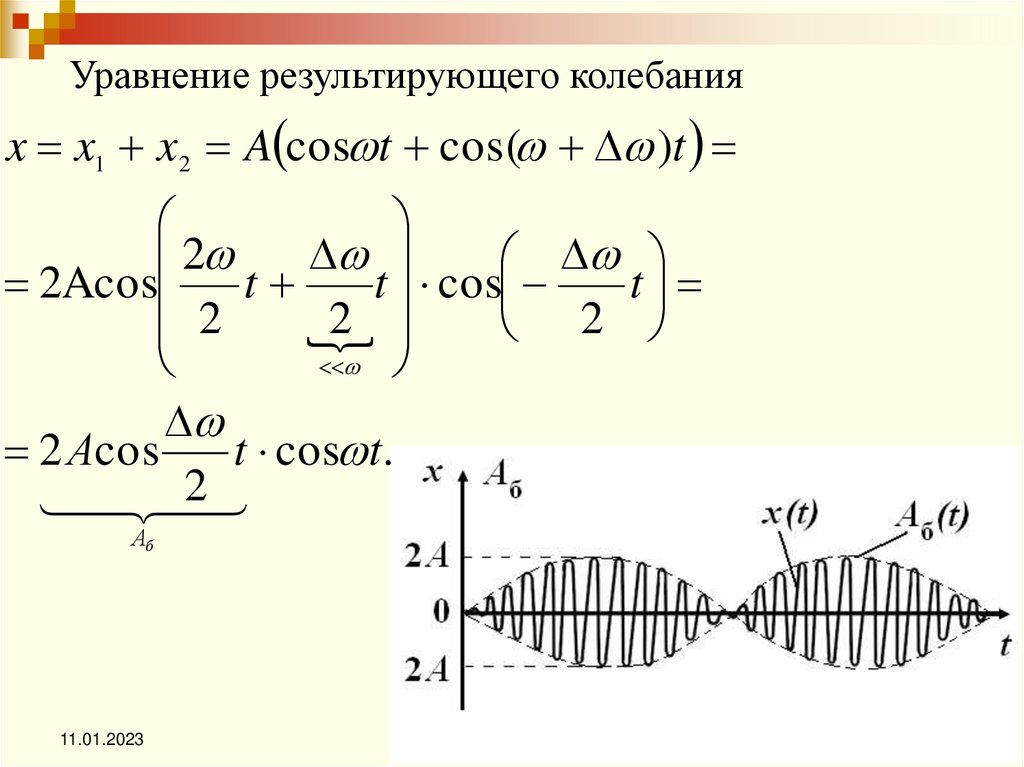
Если амплитуды двух гармонических колебаний,направленных вдоль одной прямой, одинаковы
А1 = А2 = А, а их частоты мало отличаются друг от
друга Δω = ω2 – ω1 << ω1, то результирующее сложение
этих колебаний получается с периодически
изменяющейся амплитудой Аб.
Периодические
изменения
амплитуды
от
минимального значения до максимального называются
биениями.
Уравнения колебаний
имеют вид :
x1 Acos t ,
x2 Acos( )t.
30.
Уравнение результирующего колебанияx x1 x2 A cos t cos( )t
2
2Acos
t
t cos
t
2
2
2
2 Аcos
t cos t.
2
Аб
11.01.2023
30
31.
Результирующее колебание можно рассматривать какгармоническое с частотой , амплитуда Аб которого
изменяется по периодическому закону:
Аб 2 А cos
t.
2
Частота изменения Аб в два раза больше частоты
изменения косинуса (т.к. берется по модулю), т.е.
частота биений равна разности частот складываемых
колебаний:
.
б
Период биений
11.01.2023
2
Тб
.
31
32.
11.01.202332
33.
34.
Гармоническиеколебания
совпадают
по
направлению и имеют кратные циклические частоты
ω, 2ω, 3ω и т.д. В результате их сложения получаются
периодические негармонические колебания с периодом
Т = 2π ∕ ω.
В свою очередь, любое сложное периодическое
колебание S = f(t) можно представить в виде суммы
простых гармонических колебаний с циклическими
частотами, кратными основной циклической частоте ω0
= 2π ∕ Т, где Т – период колебаний:
A0
S f t
A1cos 0 t 1 A2 cos 2 0 t 2 ... An cos n 0 t n
2
A0
An cos n 0 t n ,
2 n 1
34
35.
Такое представление периодической функции f(t) называетсяразложением функции в ряд Фурье или гармоническим
анализом сложного периодического колебания.
Члены ряда Фурье, соответствующие гармоническим
колебаниям с циклическими частотами ω0, 2ω0, 3ω0 …
называются первой (основной), второй, третьей и т.д.
гармониками сложного периодического колебания S = f(t).
Совокупность этих гармоник образуют спектр колебаний
S = f(t).
В простейших случаях спектр может состоять из
небольшого числа гармоник.
Часто под спектром колебаний понимают спектр
(совокупность) его частот.
11.01.2023
35
36.
Сложение взаимноперпендикулярных колебаний
Сложение колебаний с одинаковыми
частотами
Пусть точка одновременно движется вдоль осей x и y:
x A1cos( t 1 ),
y A2 cos( t 2 ).
x 2 y 2 2 xy
2
2
cos 2 1 sin 2 1 .
2
A1 A2 A1 A2
37.
Рассмотрим несколько частных случаев:1) Фазы колебаний равны.
x = A1 sin t;
y = A2 sin t.
x A1
y A2
или
A2
y
x
A1
38.
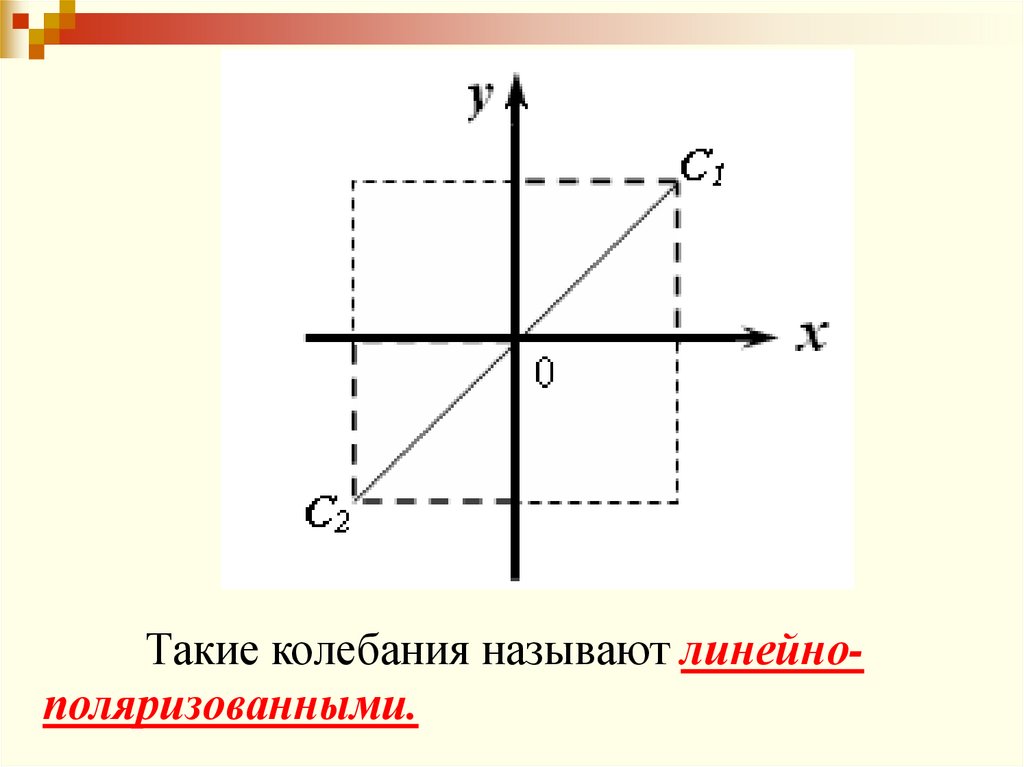
Такие колебания называют линейнополяризованными.39.
2) Разность фаз равна π.x = A1 sin ( t + ) = - A1 sin t;
y = A2 sin t.
x
A1
y
A2
или
A2
y
x
A1
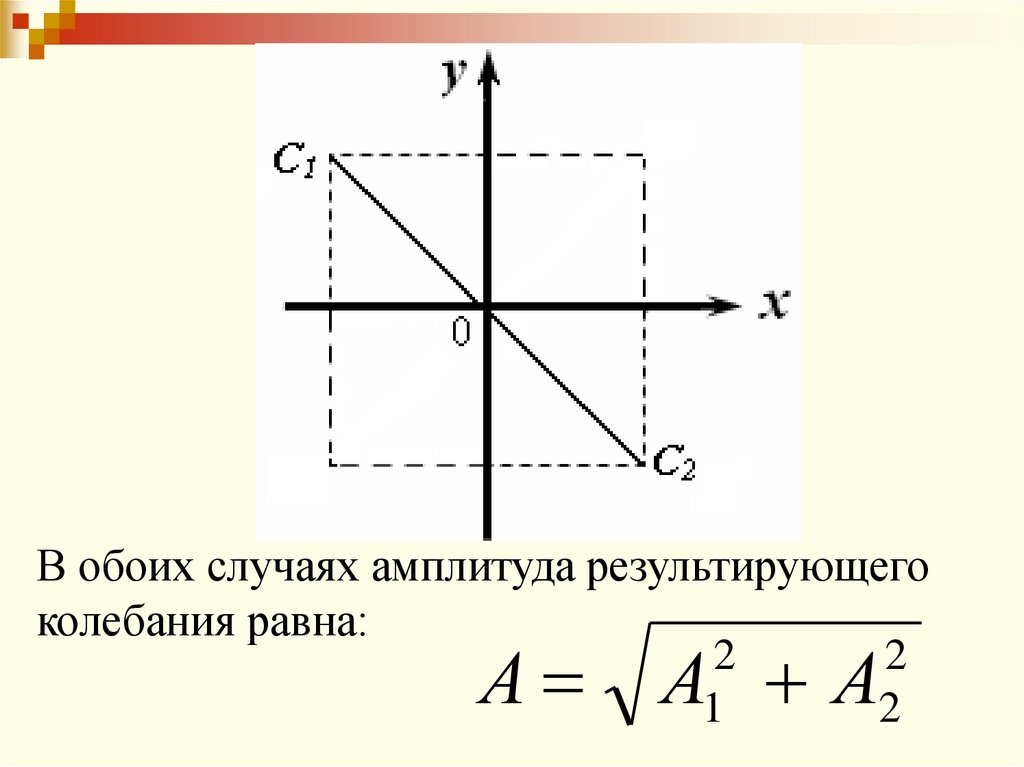
40.
В обоих случаях амплитуда результирующегоколебания равна:
2
2
1
2
А А А
41.
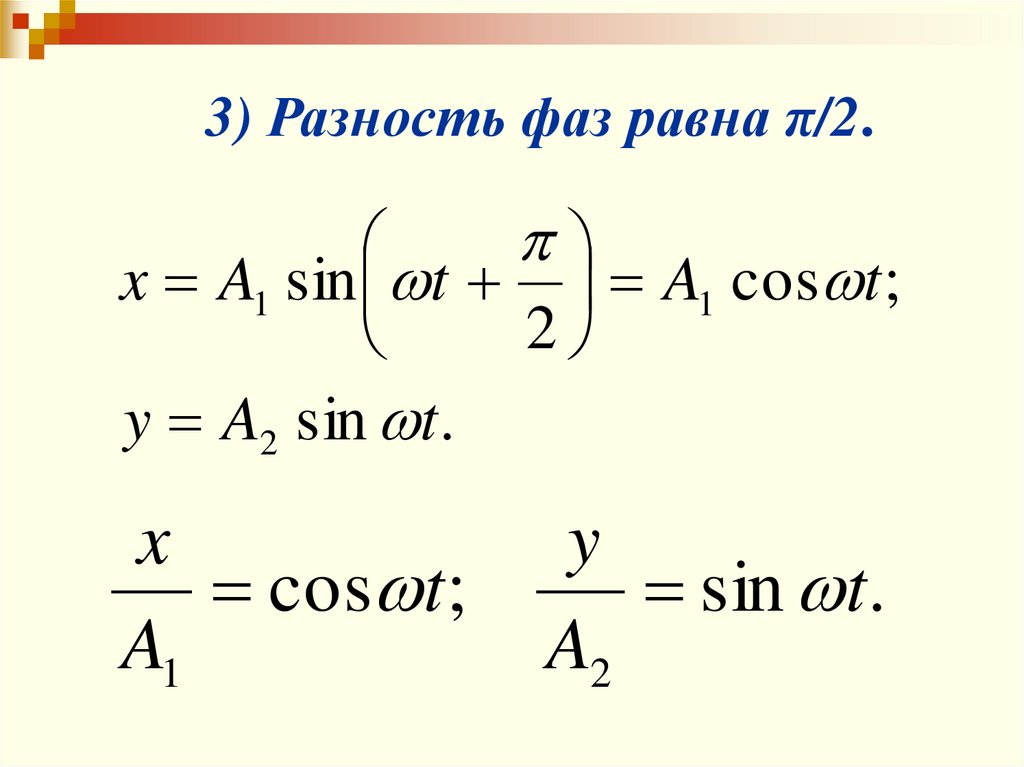
3) Разность фаз равна π/2.x A1 sin t A1 cos t ;
2
y A2 sin t.
x
cos t ;
A1
y
sin t.
A2
42.
22
y
x
1
2
2
A1
A2
Такие колебания называют эллиптически
поляризованными.
43.
Сложение колебаний с разнымичастотами
Если частоты складываемых колебаний относятся
друг к другу как целые числа, то траектория
результирующего движения оказывается замкнутой, а
само движение – периодическим.
Прочерчиваемые точкой замкнутые траектории,
образующиеся при целочисленных отношениях частот
складываемых взаимно-перпендикулярных колебаний
называют фигурами Лиссажу.
Вид фигур Лиссажу зависит от соотношения амплитуд,
частот и начальных фаз складываемых колебаний.
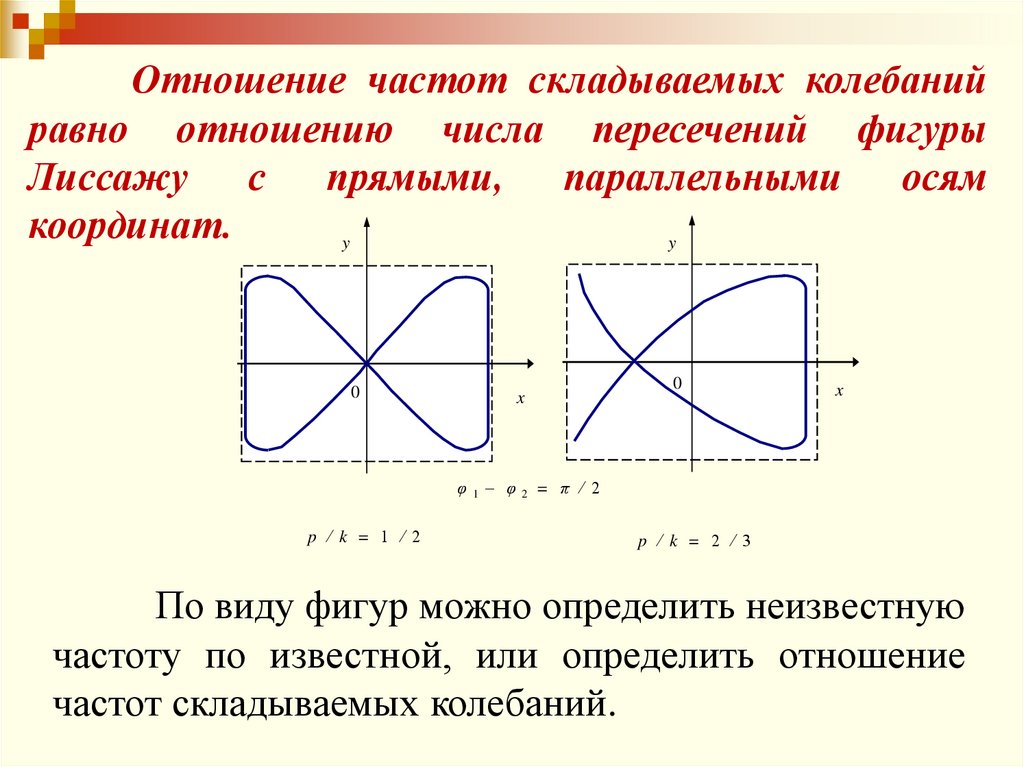
44.
Отношение частот складываемых колебанийравно отношению числа пересечений фигуры
Лиссажу
с
прямыми,
параллельными
осям
координат.
y
y
0
x
0
x
φ1 – φ2 = π ∕ 2
p ∕ k = 1 ∕ 2
p ∕ k = 2 ∕ 3
По виду фигур можно определить неизвестную
частоту по известной, или определить отношение
частот складываемых колебаний.
45.
Фигуры Лиссажу при11.01.2023
ω1 ω 2
45
46.
Затухающие колебанияЗатухающие колебания – колебания,
амплитуда которых из-за потерь энергии
реальной колебательной системой с течением
времени уменьшается.
Свободные колебания реальной системы
всегда затухают. Причиной затухания
механических колебаний является трение,
электрических колебаний – тепловые потери в
проводниках.
47.
Закон затухания колебаний определяетсясвойствами колебательных систем.
Обычно рассматриваются линейные системы –
идеализированные реальные системы, в которых
параметры, определяющие физические свойства
системы, в ходе процесса не изменяются.
Линейными системами являются, например,
пружинный маятник, колебательный контур,
индуктивность, емкость и сопротивление которого не
зависят ни от тока в контуре, ни от напряжения.
48.
Дифференциальное уравнение свободных затухающихколебаний линейной системы:
2
d S
dS
2
2
0 S 0, 1
2
dt
dt
S – колеблющаяся величина,
δ = const – коэффициент затухания,
ω0 – собственная циклическая частота колебательной
системы (т.е. в отсутствие потерь энергии, δ = 0).
Решение уравнения в виде
S e u t . 2
t
11.01.2023
48
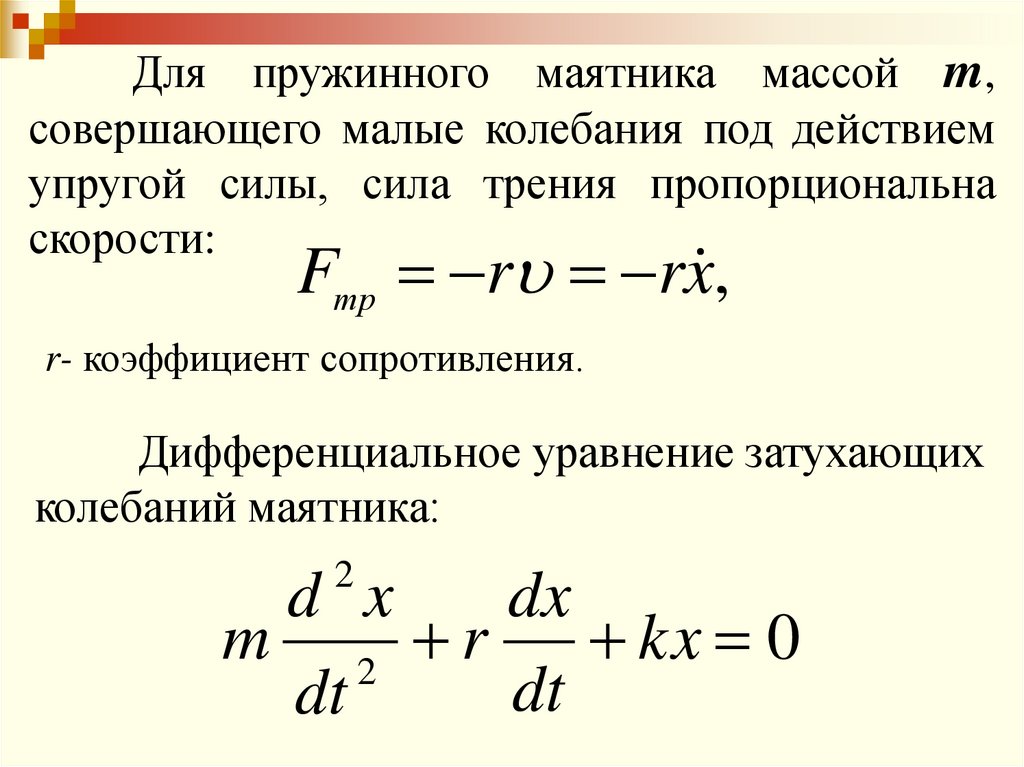
49.
Для пружинного маятника массой m,совершающего малые колебания под действием
упругой силы, сила трения пропорциональна
скорости:
Fтр r rx ,
r- коэффициент сопротивления.
Дифференциальное уравнение затухающих
колебаний маятника:
2
d x
dx
m 2 r
kx 0
dt
dt
50.
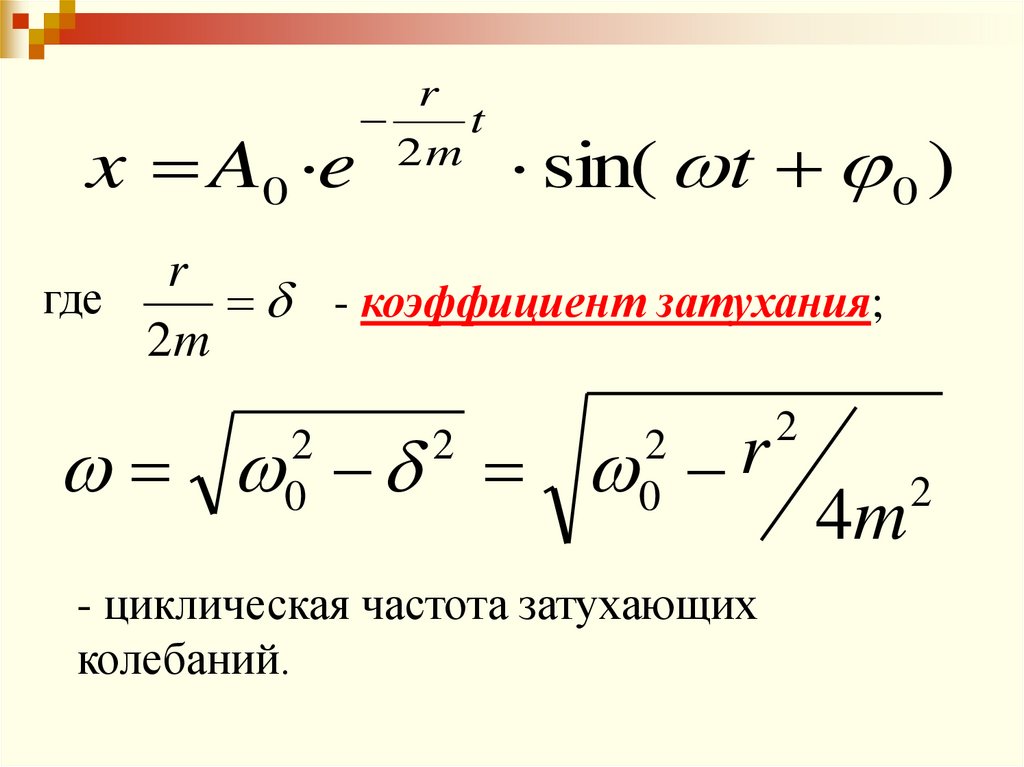
x A0 er
t
2m
sin( t 0 )
r
где
- коэффициент затухания;
2m
r
2
0
2
2
0
- циклическая частота затухающих
колебаний.
2
4m
2
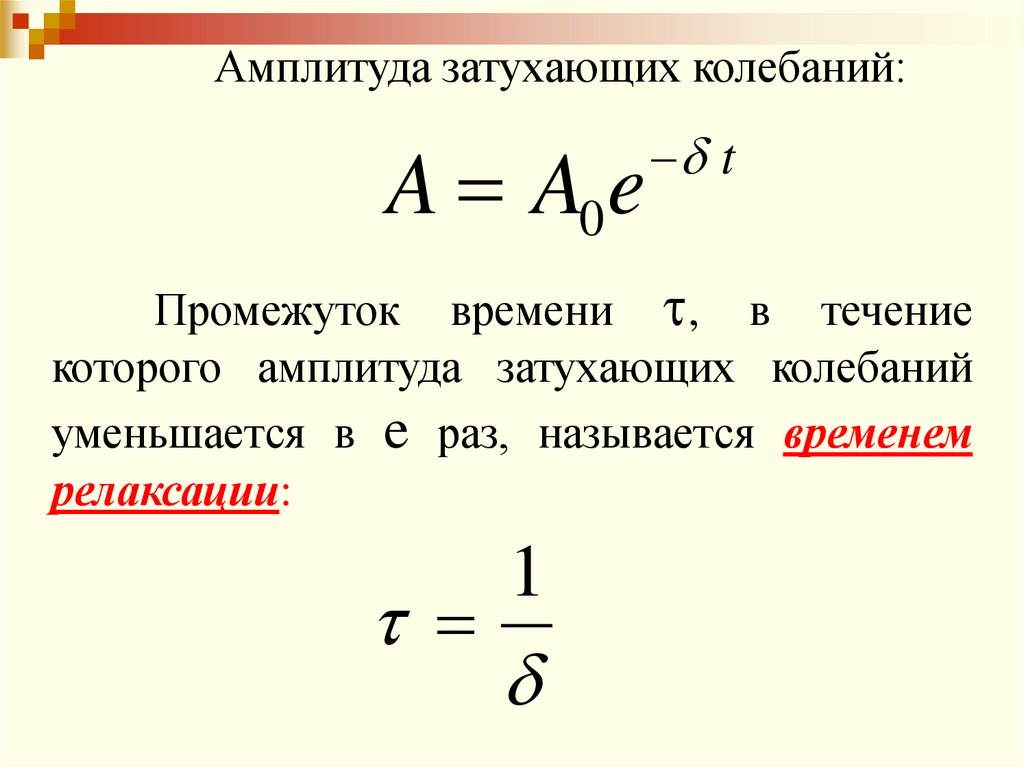
51.
Амплитуда затухающих колебаний:A A0 e
t
Промежуток времени , в течение
которого амплитуда затухающих колебаний
уменьшается в e раз, называется временем
релаксации:
1
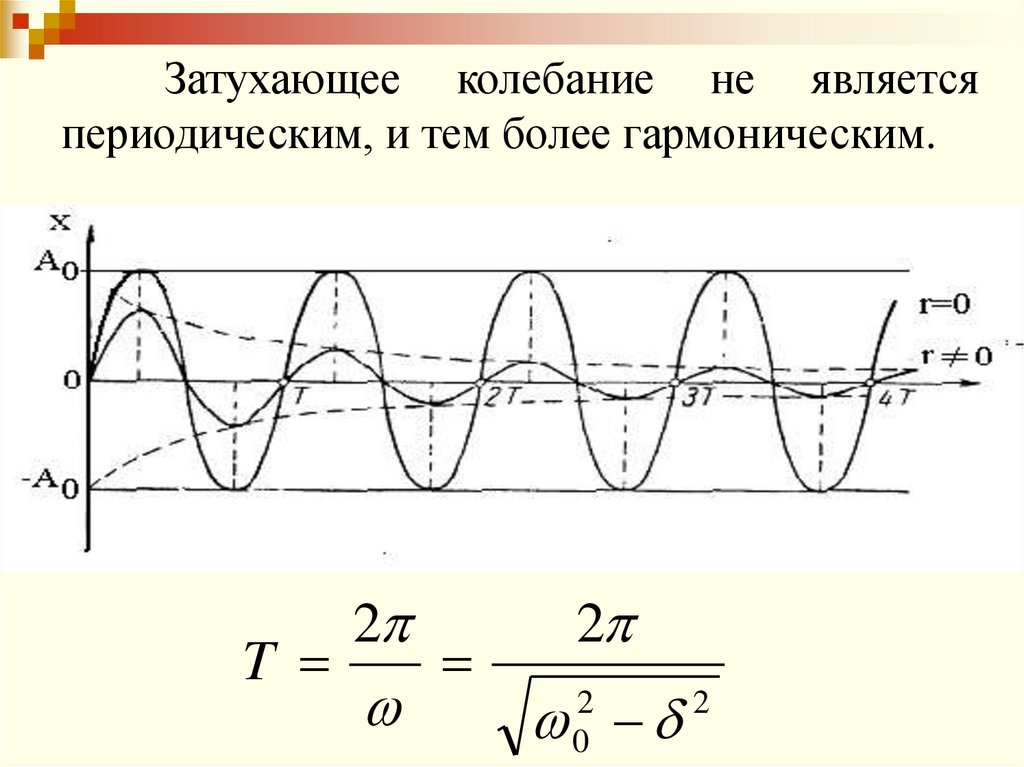
52.
Затухающее колебание не являетсяпериодическим, и тем более гармоническим.
T
2
2
2
0
2
53.
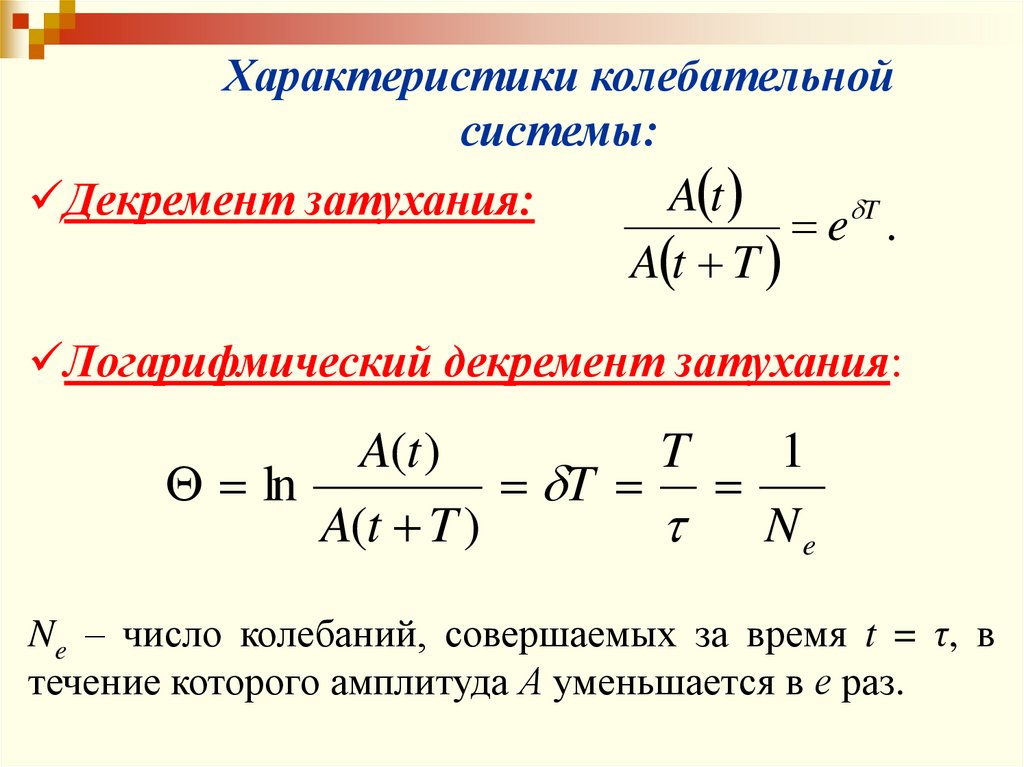
Характеристики колебательнойсистемы:
Декремент затухания:
A t
T
e .
A t T
Логарифмический декремент затухания:
A(t )
T
1
ln
T
A(t T )
Ne
Ne – число колебаний, совершаемых за время t = τ, в
течение которого амплитуда А уменьшается в е раз.
54.
Добротность:0
Q N e
T0 2
Q равна с точностью до π числу колебаний Ne,
совершаемых системой за время релаксации τ.
Q равна произведению 2π на отношение энергии W(t)
колебательной системы в момент времени t к убыли
этой энергии за промежуток времени от t до t + T:
W t
Q 2
.
W t W t T
55.
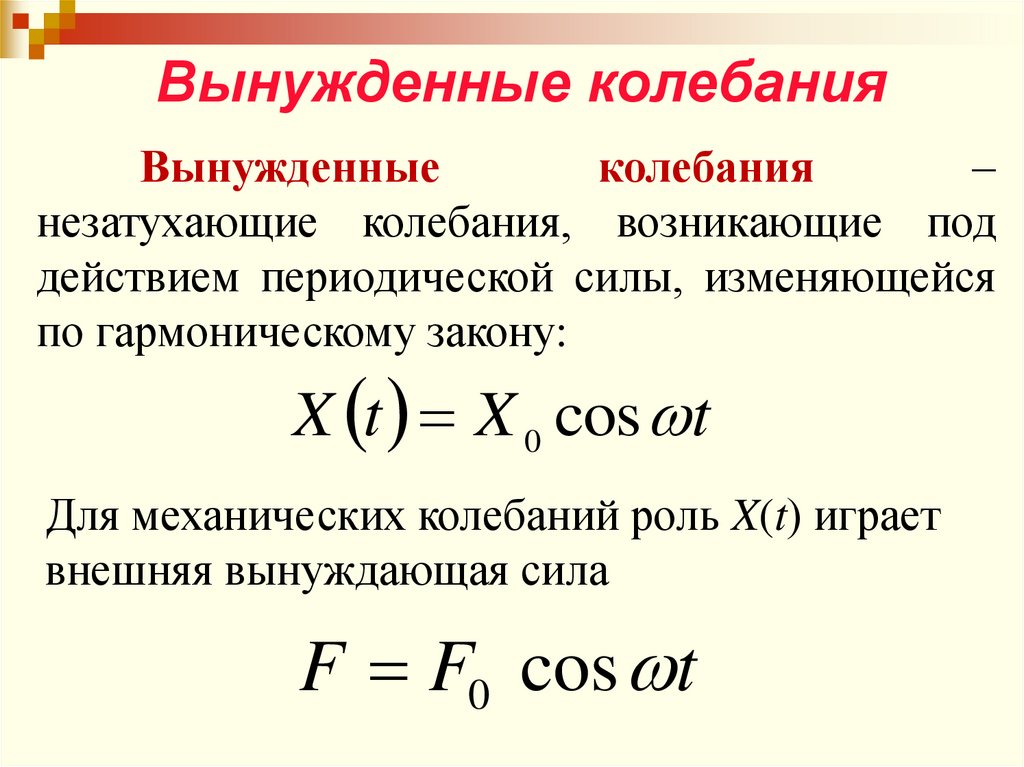
Вынужденные колебанияВынужденные
колебания
–
незатухающие колебания, возникающие под
действием периодической силы, изменяющейся
по гармоническому закону:
X t X 0 cos t
Для механических колебаний роль X(t) играет
внешняя вынуждающая сила
F F0 cos t
56.
Для простейшего пружинного маятника, накоторый действует внешняя сила:
m x kx rx F0 cos t
Дифференциальное уравнение вынужденных
колебаний маятника:
x 2 x x
2
0
F0
m
cos t
57.
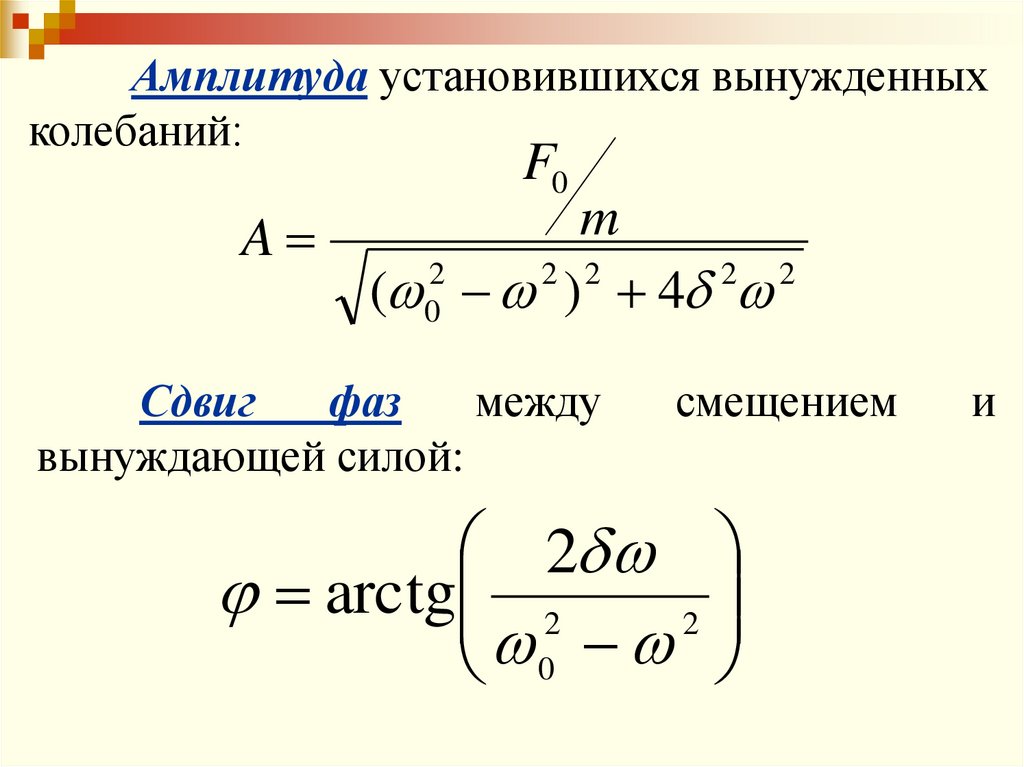
Амплитуда установившихся вынужденныхколебаний:
F0
m
A
2
2 2
2 2
( 0 ) 4
Сдвиг
фаз
между
вынуждающей силой:
смещением
2
arctg 2
2
0
и
58.
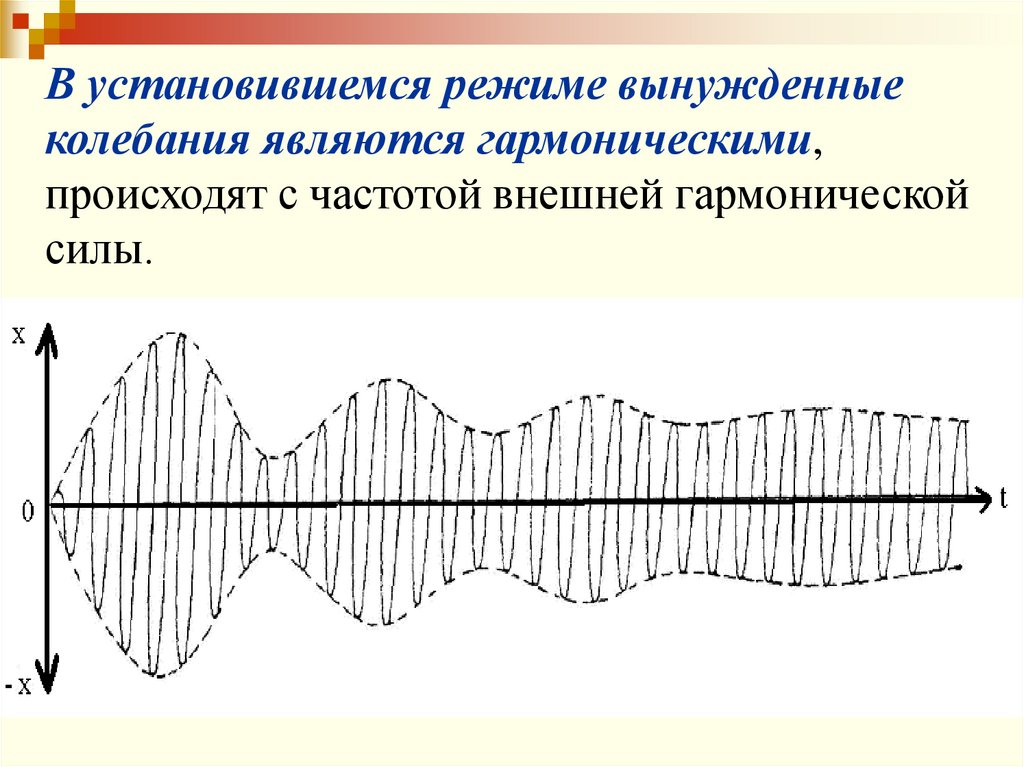
В установившемся режиме вынужденныеколебания являются гармоническими,
происходят с частотой внешней гармонической
силы.
59.
В случае установившихся колебаний принекоторой частоте внешней силы – резонансной
частоте ωрез
– амплитуда смещения достигает
максимального значения:
рез 2
2
0
2
Явление резкого возрастания амплитуды
вынужденных колебаний при приближении частоты
вынуждающей силы к частоте, равной или близкой
собственной
частоте
колебательной
системы,
называется механическим резонансом.
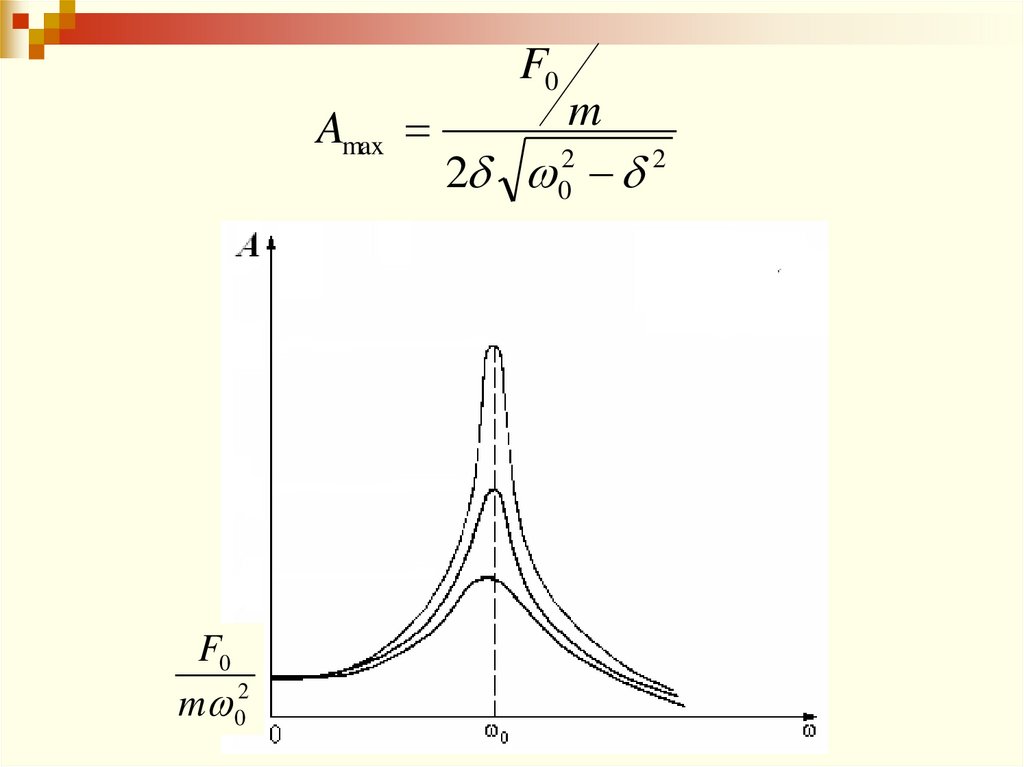
60.
F0Amax
F0
m 02
m
2
2
2 0
61. Электромагнитные колебания
ЭЛЕКТРОМАГНИТНЫЕКОЛЕБАНИЯ
11.01.2023
61
62.
Квазистационарные токи.Процессы в колебательном
контуре
Примером электрической цепи, в которой могут
происходить свободные электрические колебания,
служит простейший колебательный контур.
Для
простейшего
колебательного контура
R = 0.
62
11.01.2023
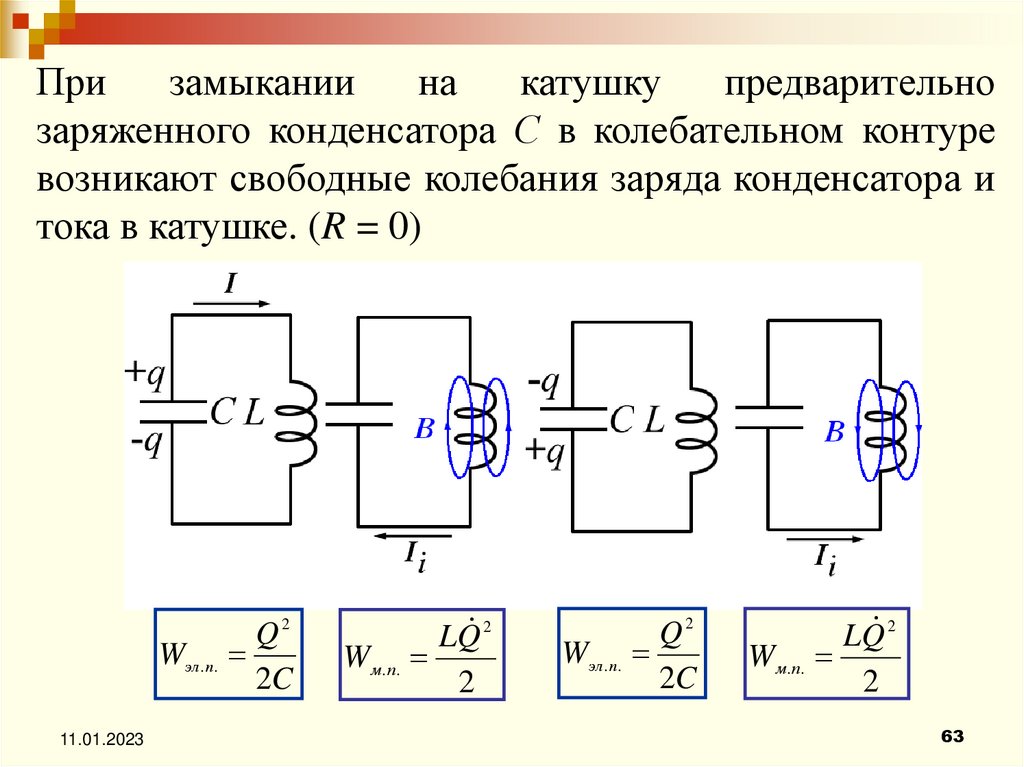
63.
Призамыкании
на
катушку
предварительно
заряженного конденсатора С в колебательном контуре
возникают свободные колебания заряда конденсатора и
тока в катушке. (R = 0)
Q2
Wэл .п.
2C
11.01.2023
LQ 2
Wм.п.
2
Q2
Wэл .п.
2C
LQ 2
Wм.п.
2
63
64.
Энергия электрического поляобкладками конденсатора С:
запасается
между
2
Q
Wэл.п.
.
2C
Энергия магнитного поля сосредоточена в катушке L:
2
2
LI
LQ
Wм.п.
.
2
2
Если R→ 0, тогда полная энергия:
2
Q
LQ
W
const.
2C
2
2
11.01.2023
64
65.
Переменноеэлектромагнитное
поле
распространяется в пространстве со скоростью
равной скорости света c = 3 · 108 м/с. Если l –
линейные размеры контура не велики (l ‹‹ c / ν, ν
– частота колебаний в контуре), то в каждый
момент времени сила тока во всех частях
контура одинакова. Такой переменный ток
называется квазистационарным.
11.01.2023
65
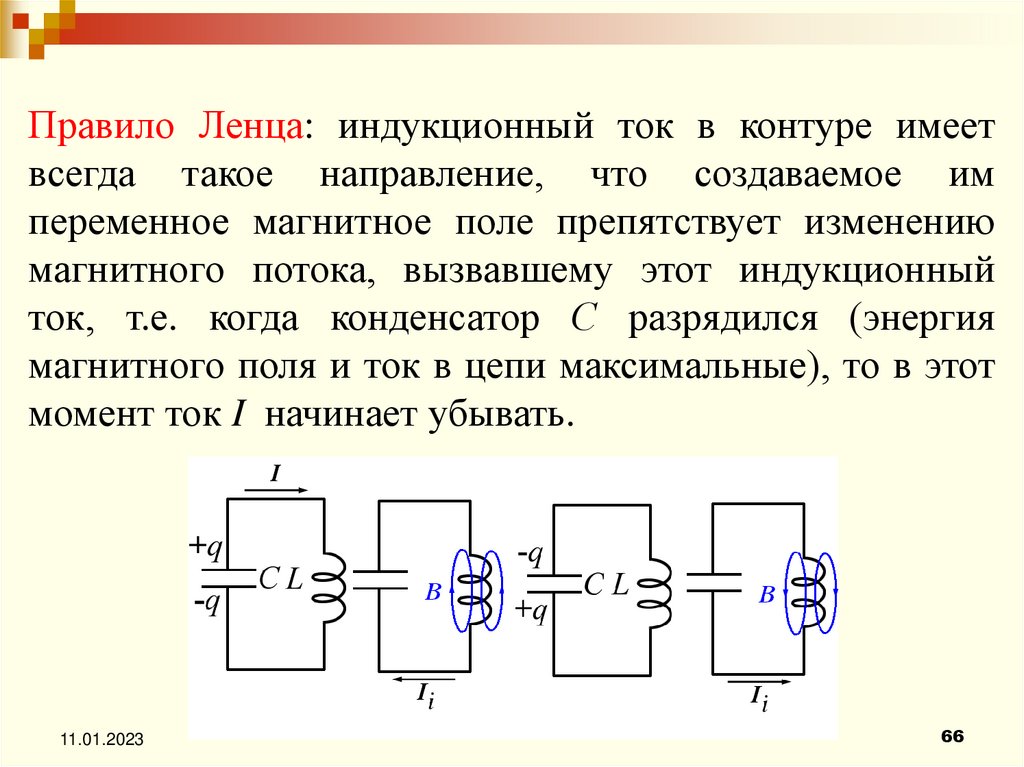
66.
Правило Ленца: индукционный ток в контуре имеетвсегда такое направление, что создаваемое им
переменное магнитное поле препятствует изменению
магнитного потока, вызвавшему этот индукционный
ток, т.е. когда конденсатор С разрядился (энергия
магнитного поля и ток в цепи максимальные), то в этот
момент ток I начинает убывать.
11.01.2023
66
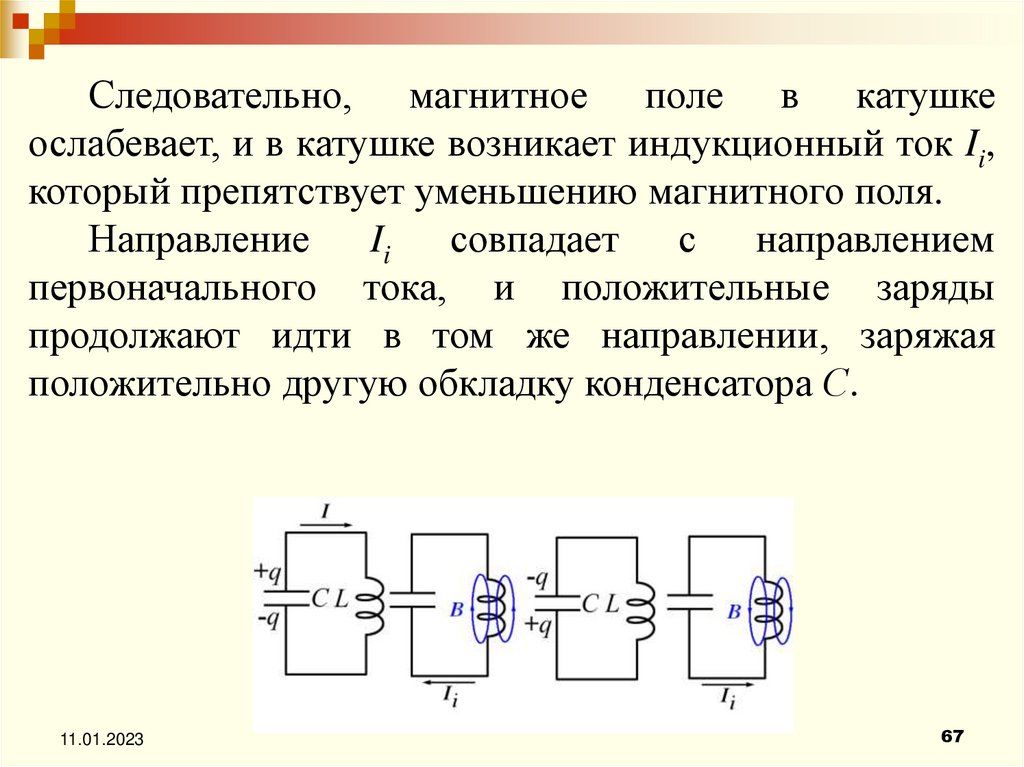
67.
Следовательно, магнитное поле в катушкеослабевает, и в катушке возникает индукционный ток Ii,
который препятствует уменьшению магнитного поля.
Направление
Ii совпадает с направлением
первоначального тока, и положительные заряды
продолжают идти в том же направлении, заряжая
положительно другую обкладку конденсатора С.
11.01.2023
67
68.
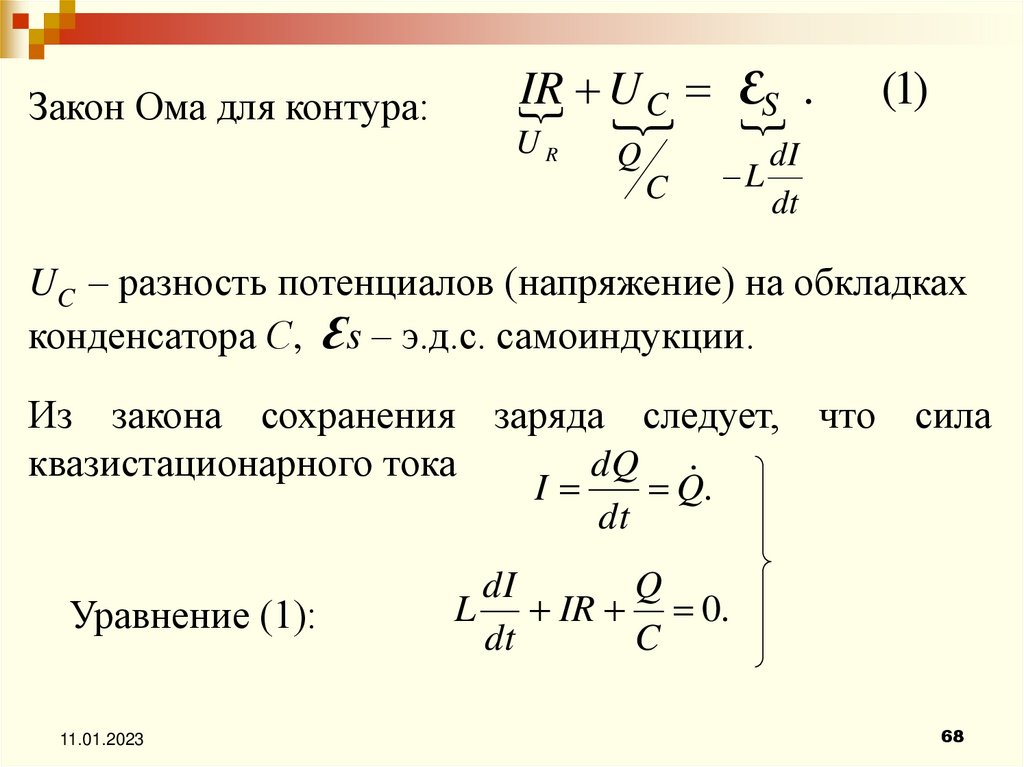
Закон Ома для контура:IR U C ES .
UR
Q
C
(1)
dI
L
dt
UC – разность потенциалов (напряжение) на обкладках
конденсатора С, Ɛs – э.д.с. самоиндукции.
Из закона сохранения заряда следует, что сила
квазистационарного тока
dQ
I
Уравнение (1):
11.01.2023
dt
Q.
dI
Q
L IR 0.
dt
C
68
69.
R1
Q Q
Q 0
L
LC
2
(2)
02
дифференциальное уравнение колебаний заряда Q в
контуре – дифференциальное уравнение затухающих
колебаний.
1
Q
Q 0
●R=0→
LC
дифференциальное
уравнение
колебаний.
гармонических
Свободные электрические колебания в колебательном
контуре являются гармоническими.
11.01.2023
69
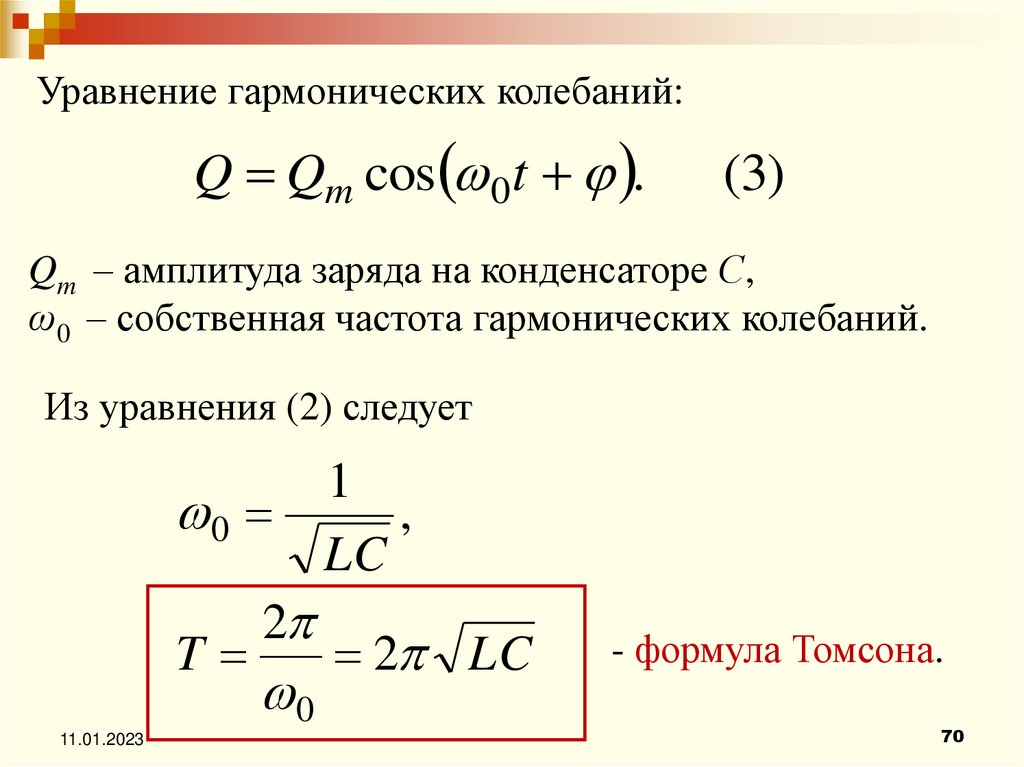
70.
Уравнение гармонических колебаний:Q Qm cos 0t .
(3)
Qm – амплитуда заряда на конденсаторе С,
ω0 – собственная частота гармонических колебаний.
Из уравнения (2) следует
1
0
,
LC
2
T
2 LC
0
11.01.2023
- формула Томсона.
70
71.
I Q 0 Qm sin 0 t I m cos 0 t .2
I
(4)
m
Qm
Im
LC
амплитуда тока.
Q Qm
UC
cos 0t U m cos 0t .
C
C
(5)
Um
Qm
Um
C
11.01.2023
-
амплитуда напряжения
71
72.
Из сопоставления электрических и механическихколебаний следует, что:
•энергия электрического поля аналогична
потенциальной энергии упругой деформации
•энергия
магнитного
поля
аналогична
кинетической энергии;
•Индуктивность L играет роль массы т
•1/С – роль коэффициента жесткости k
•Заряду q соответствует смещение маятника х
•Силе тока I ~ скорость υ
•Напряжению U ~ ускорение а
72
73.
Затухающие электрические колебанияВ реальном контуре R ≠ 0,
следовательно, есть потеря энергии
и затухание колебаний, которое
характеризуется
коэффициентом
затухания
R
.
2L
R
1
Q Q
Q 0
L
LC
2
11.01.2023
02
дифференциальное
уравнение затухающих
колебаний.
73
74.
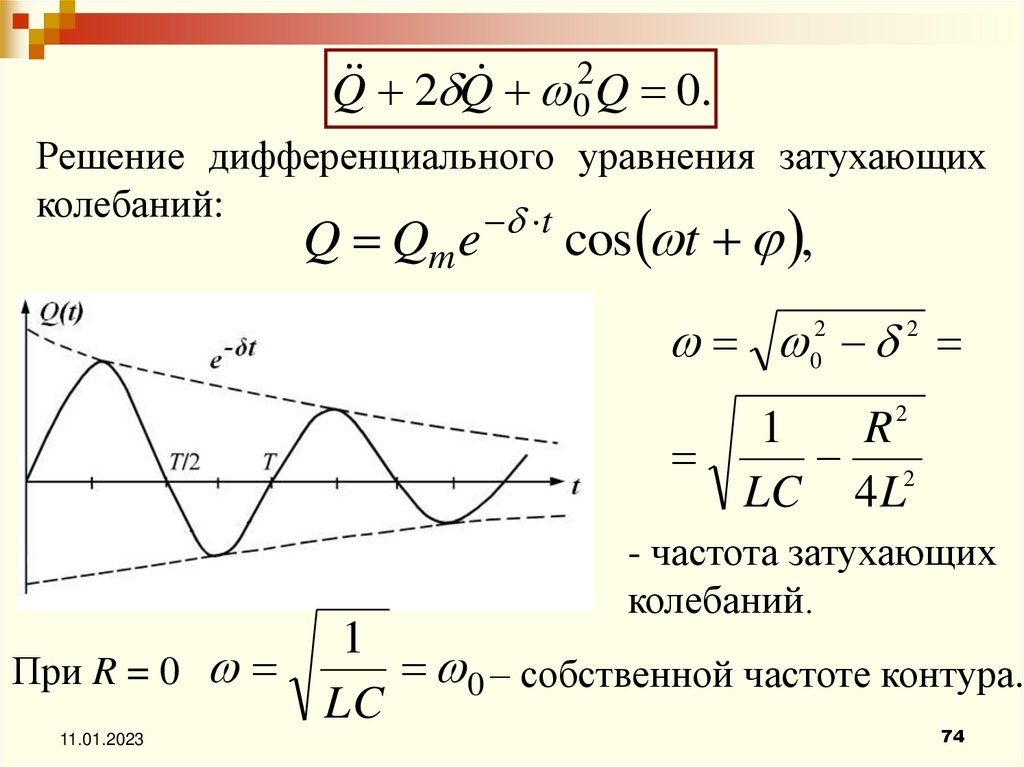
2 Q 2Q 0.Q
0
Решение дифференциального уравнения затухающих
колебаний:
t
Q Qm e
cos t ,
02 2
1
R2
2
LC 4 L
- частота затухающих
колебаний.
При R = 0
11.01.2023
1
0 – собственной частоте контура.
LC
74
75.
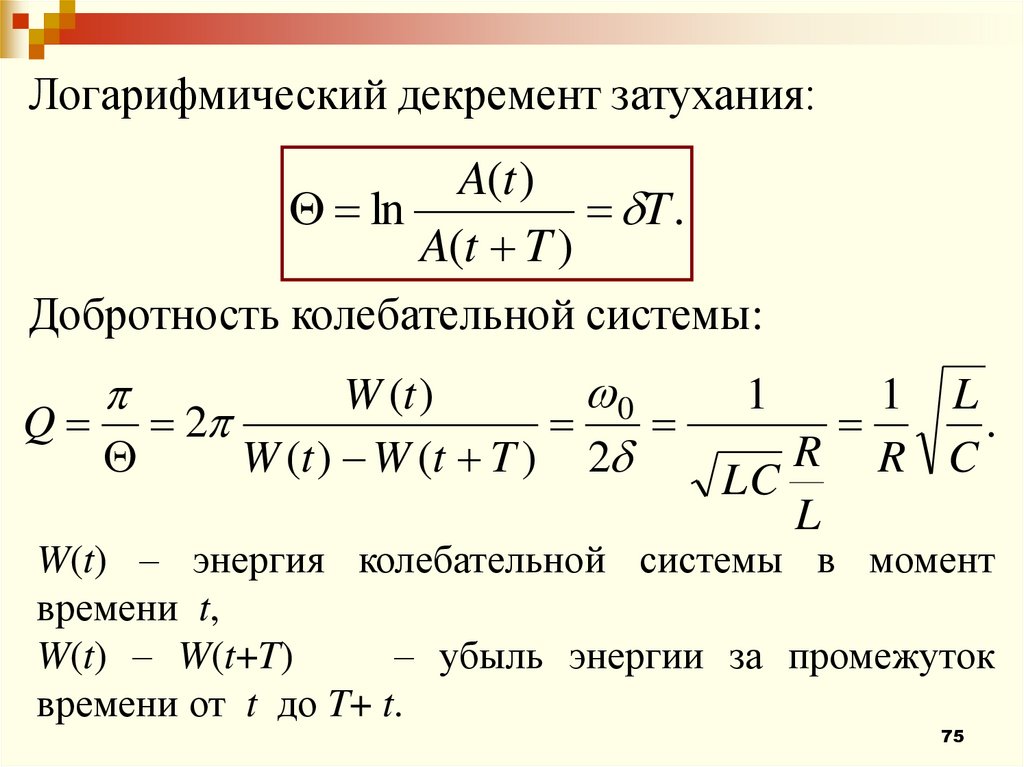
Логарифмический декремент затухания:A(t )
ln
T .
A(t T )
Добротность колебательной системы:
0
W (t )
Q 2
W (t ) W (t T ) 2
1
1 L
.
R R C
LC
L
W(t) – энергия колебательной системы в момент
времени t,
W(t) – W(t+T)
– убыль энергии за промежуток
времени от t до T+ t.
75
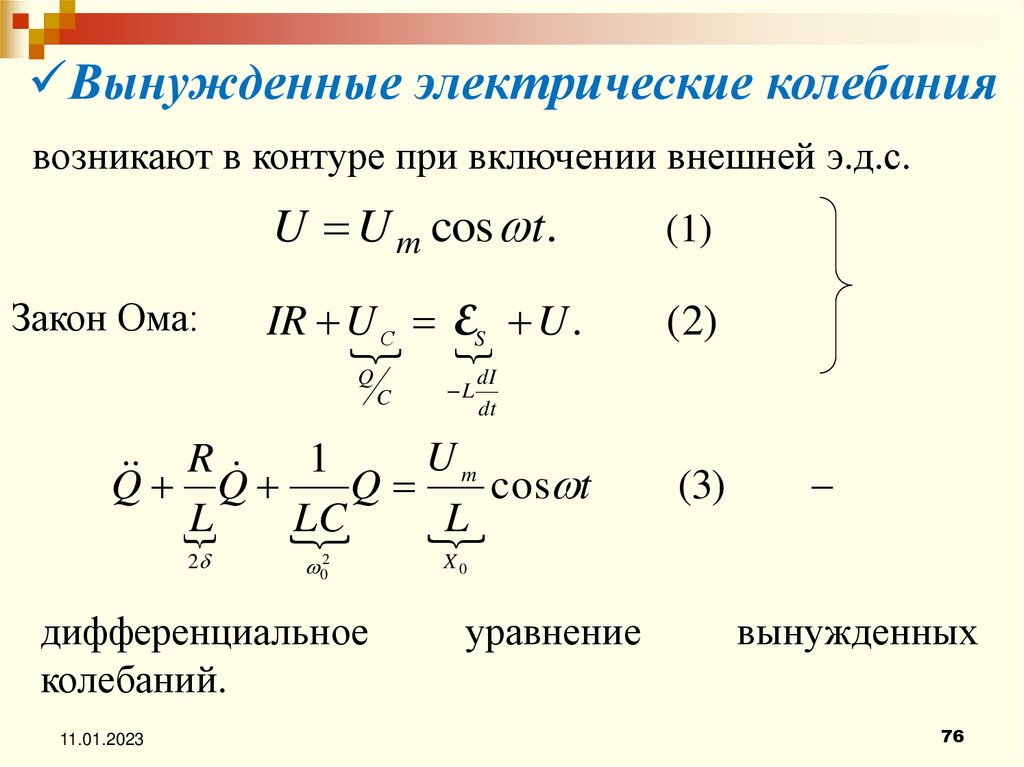
76.
Вынужденные электрические колебаниявозникают в контуре при включении внешней э.д.с.
Закон Ома:
U U m cos t.
(1)
IR U С ES U .
(2)
Q
C
L
dI
dt
Um
R
1
Q Q
Q
cos t
L
LC
L
2
02
дифференциальное
колебаний.
11.01.2023
(3)
X0
уравнение
вынужденных
76
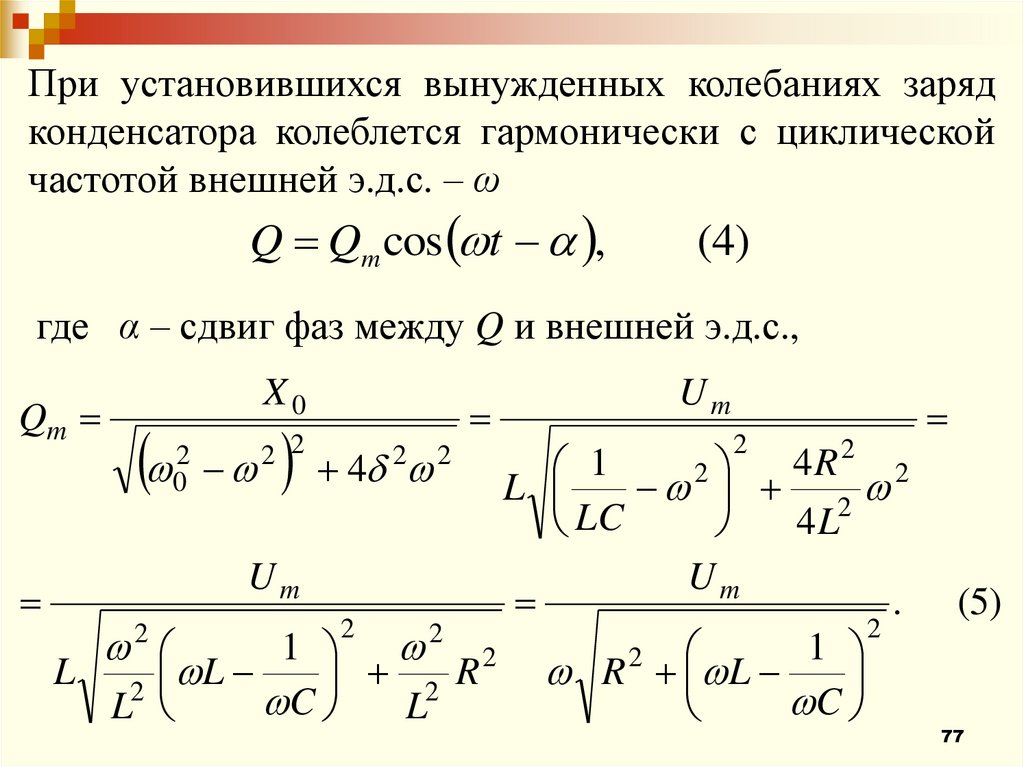
77.
При установившихся вынужденных колебаниях зарядконденсатора колеблется гармонически с циклической
частотой внешней э.д.с. – ω
Q Qm cos t ,
(4)
где α – сдвиг фаз между Q и внешней э.д.с.,
Qm
X0
2
2 2
0 4 2 2
Um
2
2
1
4
R
L
2 2 2
4L
LC
Um
Um
.
2
2
2
1
2 2
1
2
L 2 L
R L
2 R
C
C
L
L
(5)
77
78.
I Q Qm sin t Qm cos t .2
I
(6)
m
I m Qm .
(7)
Подставив уравнение (5) в уравнение (7), получим
Um
Im
. (8)
2
1
2
R L
C
1
Z R L
C
2
2
– полное сопротивление
цепи.
78
79.
Из уравнения для внешней э.д.с. (1) и уравнения (6)видно, что между током в контуре I и внешней э.д.с. U
есть сдвиг фаз
.
2
(9)
Решение дифференциального уравнения затухающих
колебаний дает
R
2
L
tg tg arctg 2
2
0 1 2
LC
R
R
L
. (10)
1
1
L
L
L C
C
79
11.01.2023
80.
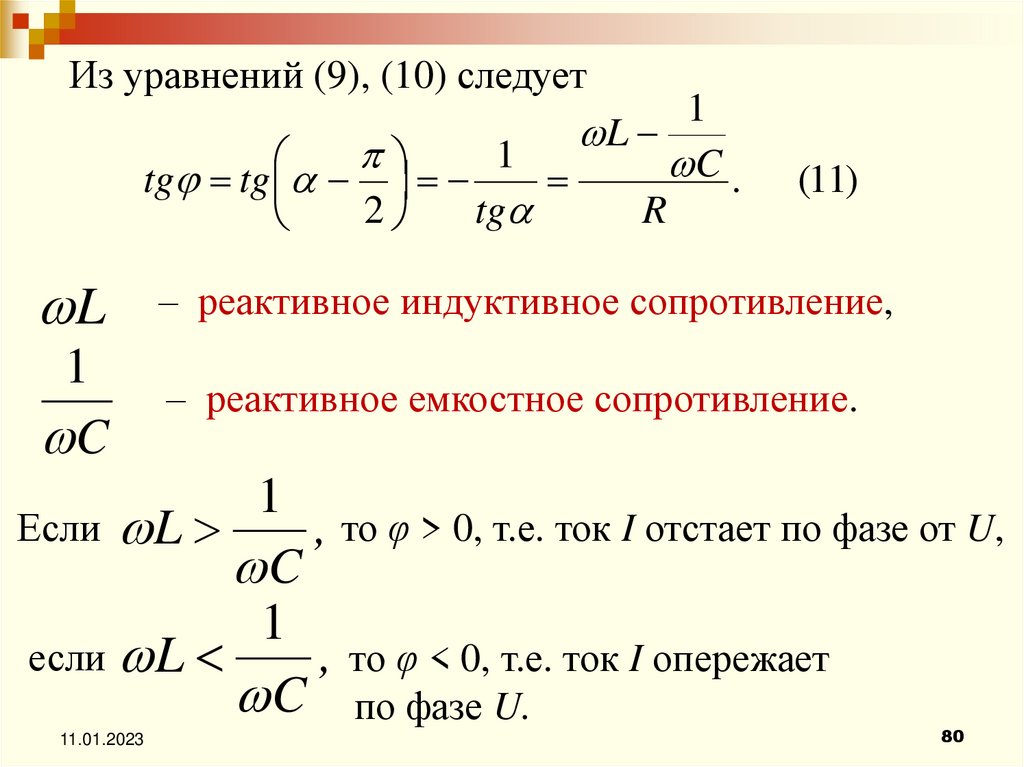
Из уравнений (9), (10) следует1
L
1
C .
tg tg
2
tg
R
(11)
L
– реактивное индуктивное сопротивление,
1
C
– реактивное емкостное сопротивление.
1
Если L
, то φ > 0, т.е. ток I отстает по фазе от U,
C
1
если L
, то φ < 0, т.е. ток I опережает
C по фазе U.
11.01.2023
80
81.
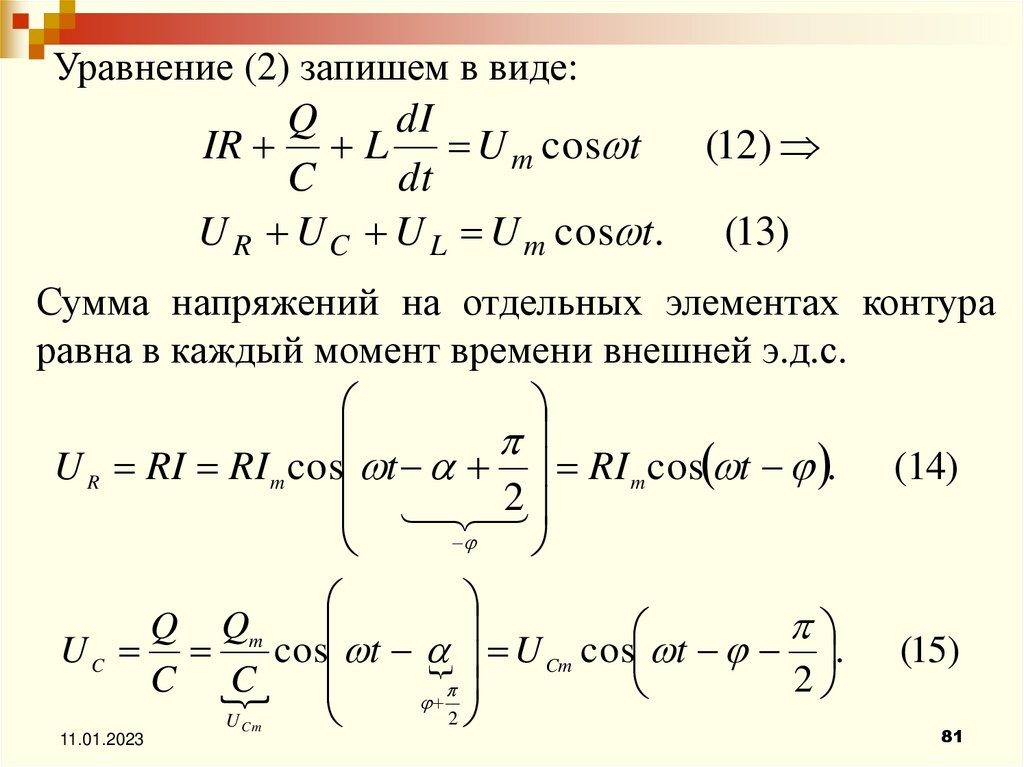
Уравнение (2) запишем в виде:Q
dI
IR L U m cos t
(12)
C
dt
U R U C U L U m cos t. (13)
Сумма напряжений на отдельных элементах контура
равна в каждый момент времени внешней э.д.с.
U R RI RI m cos t RI m cos t . (14)
2
Q Qm
UC
cos t
U Cm cos t .
C
C
2
2
U
11.01.2023
Cm
(15)
81
82.
QmU Cm
C
.
Um
Im
.
2
C
1
2
C R L
C
(16)
dI
U L L LI m sin t U Lm cos t .
dt
2
U
(17)
Lm
Сравнивая формулы для I, UR, UC, UL , можно сделать
вывод
UR изменяется в фазе с током I,
UC отстает от I, UR по фазе на
UL опережает I по фазе на
2
2
11.01.2023
82
83.
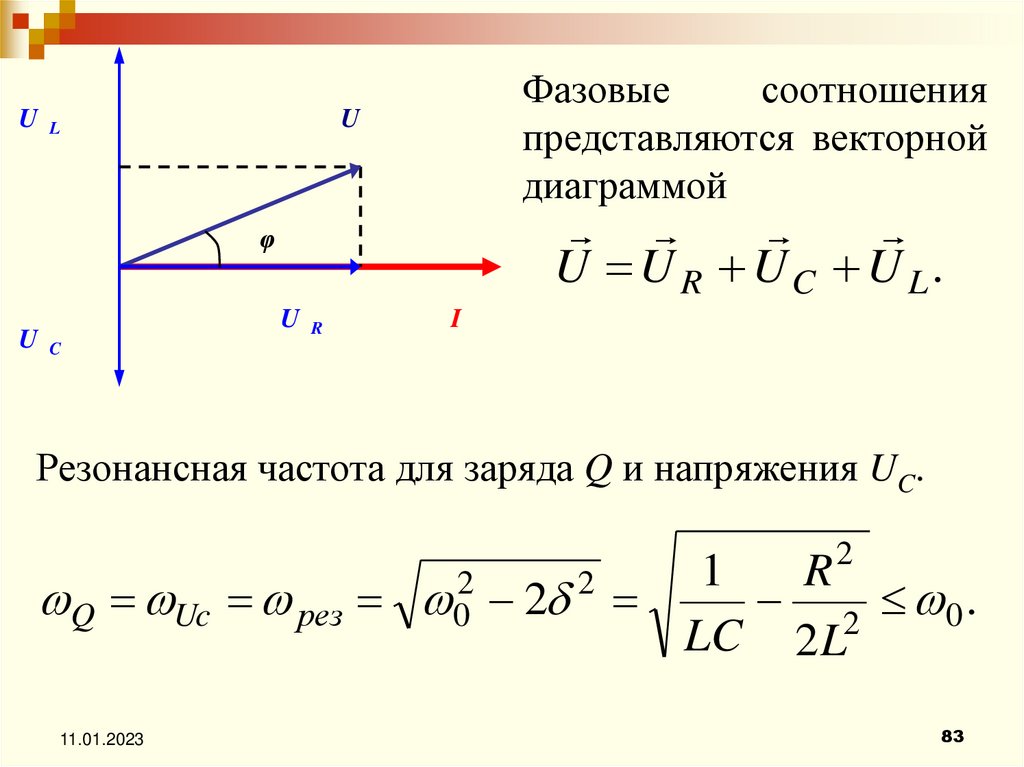
U LФазовые
соотношения
представляются векторной
диаграммой
U
U U R UC U L.
φ
U C
U R
I
Резонансная частота для заряда Q и напряжения UC.
2
1
R
Q Uc рез 02 2 2
2 0 .
LC 2 L
11.01.2023
83
84.
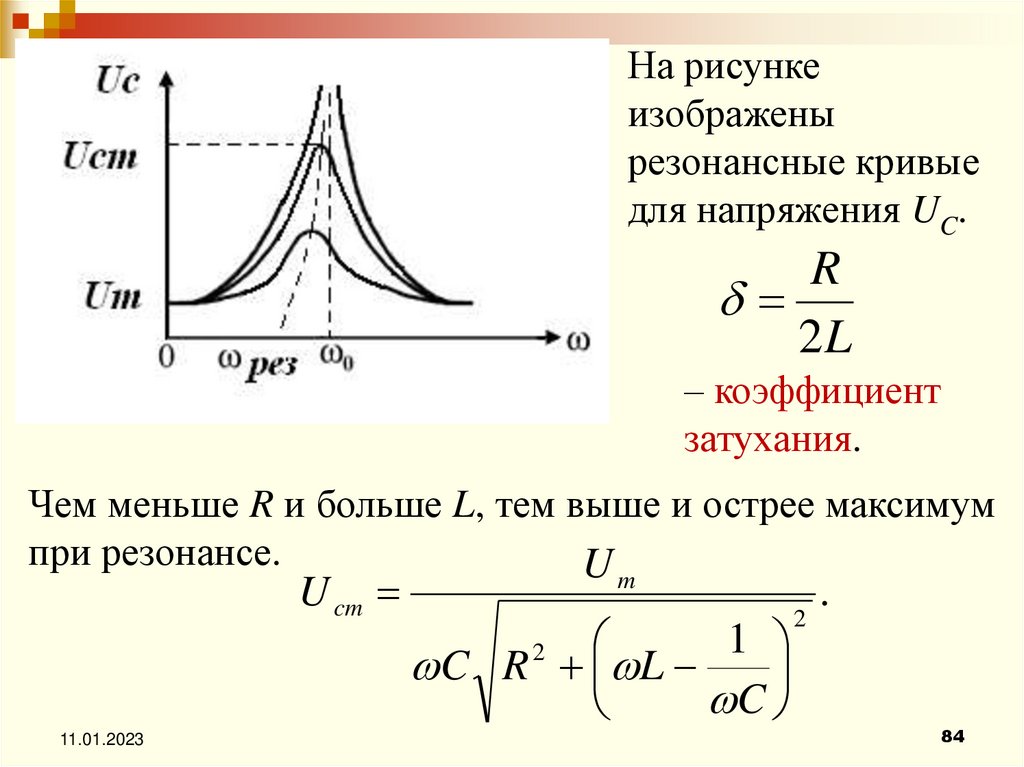
На рисункеизображены
резонансные кривые
для напряжения UC.
R
2L
– коэффициент
затухания.
Чем меньше R и больше L, тем выше и острее максимум
при резонансе.
U
U cm
m
1
C R L
C
.
2
2
11.01.2023
84
85.
Резонанс для тока возникает при1
L
0.
C
В этом случае угол сдвига фаз между током и
напряжением φ = 0 (tgφ = 0), изменение тока и
напряжения происходит синфазно.
I рез
11.01.2023
1
0 .
LC
85
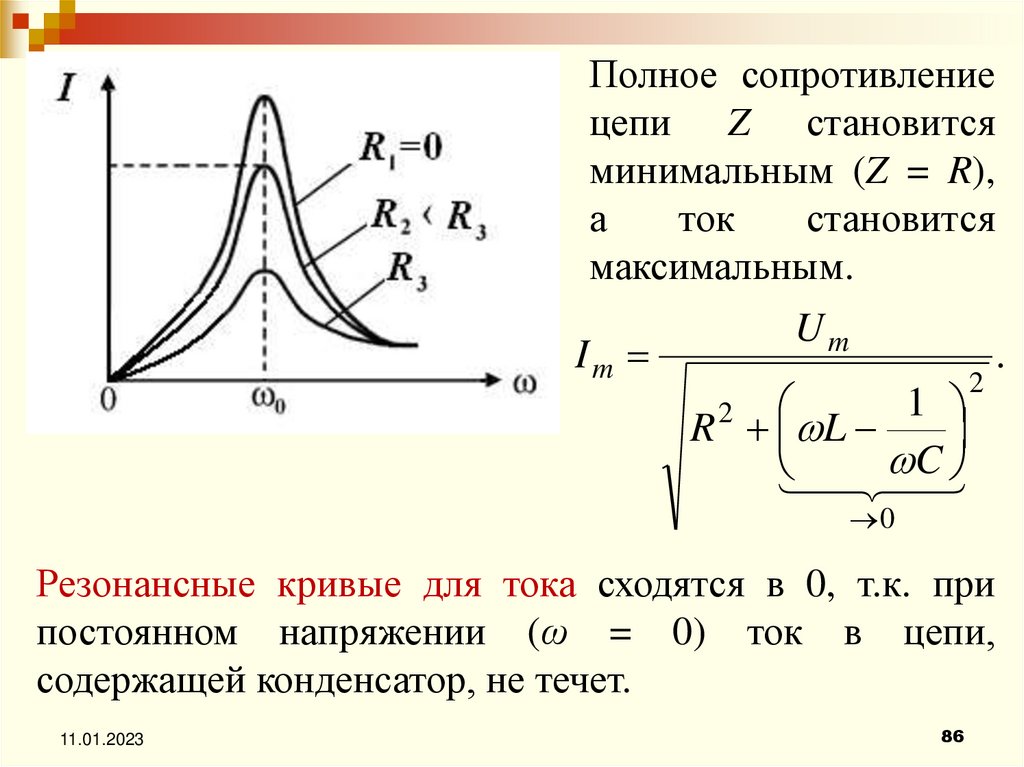
86.
Полное сопротивлениецепи Z становится
минимальным (Z = R),
а
ток
становится
максимальным.
Im
Um
1
R L
C
2
2
0
Резонансные кривые для тока сходятся в 0, т.к. при
постоянном напряжении (ω = 0) ток в цепи,
содержащей конденсатор, не течет.
11.01.2023
86
.
87.
Ток в цепи определяется активным сопротивлением Rи принимает максимально возможное при данном Um
значение. При этом падение напряжения на активном
сопротивлении
равно
внешнему
напряжению,
приложенному к цепи UR = U, а падение напряжения на
конденсаторе
UС и катушке индуктивности UL
одинаковы по амплитуде и противоположны по фазе.
Это явление называется резонансом напряжений или
последовательным резонансом.
11.01.2023
87
88.
Явление резонанса напряжений используется в техникедля усиления колебания напряжения какой-либо
определённой частоты (для узкого интервала частот
вблизи
резонансной
частоты
контура
–
радиоприёмник).
Явление резонанса напряжений необходимо учитывать
при расчёте изоляции электрических цепей (линий),
содержащих C и L с целью предотвращения её пробоя.
11.01.2023
88
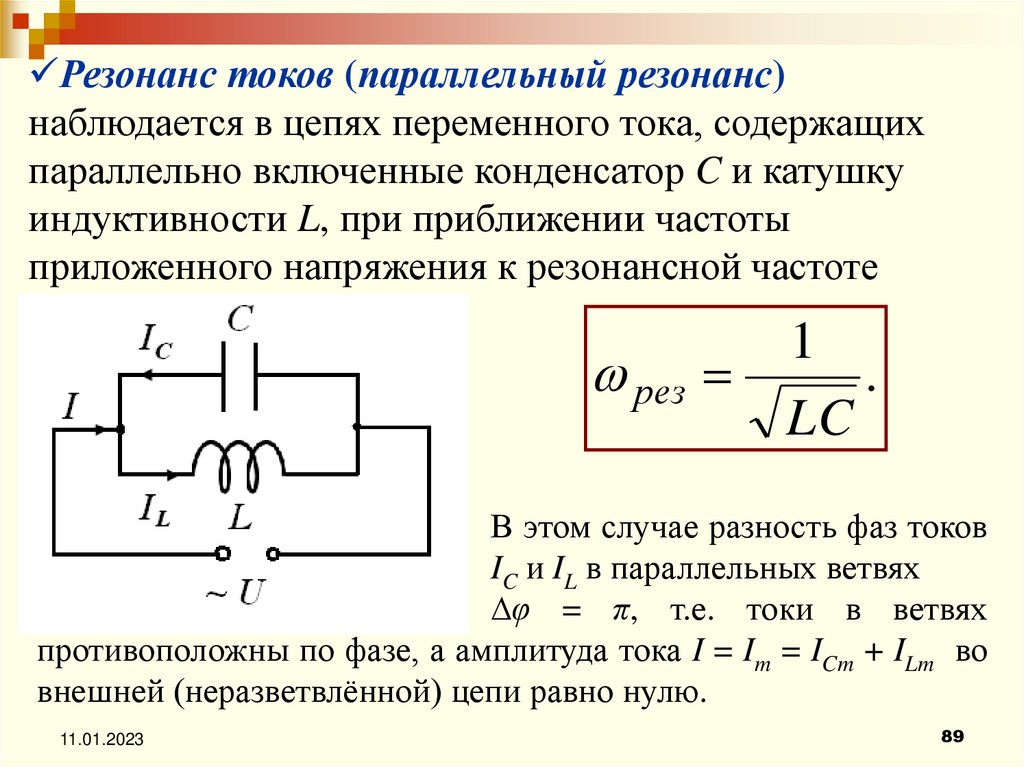
89.
Резонанс токов (параллельный резонанс)наблюдается в цепях переменного тока, содержащих
параллельно включенные конденсатор C и катушку
индуктивности L, при приближении частоты
приложенного напряжения к резонансной частоте
рез
1
.
LC
В этом случае разность фаз токов
IC и IL в параллельных ветвях
∆φ = π, т.е. токи в ветвях
противоположны по фазе, а амплитуда тока I = Im = ICm + ILm во
внешней (неразветвлённой) цепи равно нулю.
11.01.2023
89
90.
При активном сопротивлении цепей R ≠ 0 разность фазтоков ∆φ ≠ π амплитуда силы тока Im ≠ 0, но будет иметь
наименьшее возможное значение. Таким образом, при
резонансе токов токи IC и IL компенсируются, а сила
тока I в подводящих проводах достигает минимального
значения, обусловленного только током через R.
Может оказаться, что сила тока I << IC и IL.
Такой контур оказывает большое сопротивление
переменному току с частотой, близкой к ωрез.
Используется в резонансных усилителях; индукционных
печах, в которых C и L подбирают таким образом,
чтобы при частоте генератора сила тока через
нагревательную катушку была гораздо больше, чем
сила тока в подводящих проводах.
90
91.
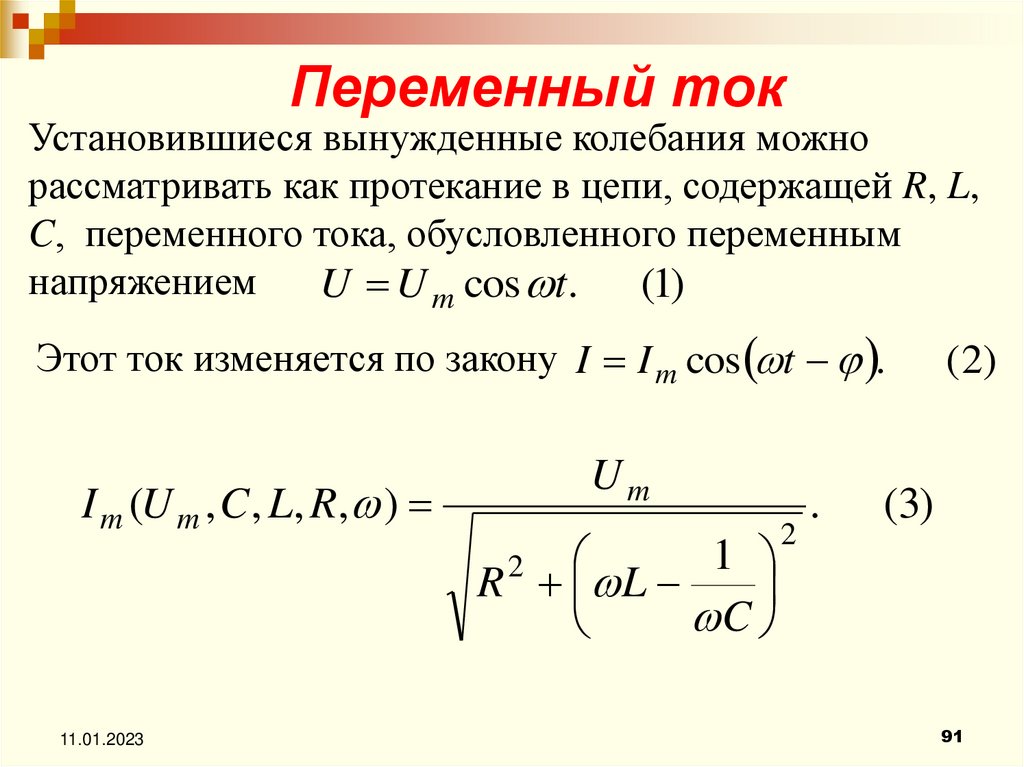
Переменный токУстановившиеся вынужденные колебания можно
рассматривать как протекание в цепи, содержащей R, L,
C, переменного тока, обусловленного переменным
напряжением
U U m cos t. (1)
Этот ток изменяется по закону I I m cos t .
I m (U m , C , L, R, )
Um
1
R L
C
2
.
(2)
(3)
2
11.01.2023
91
92.
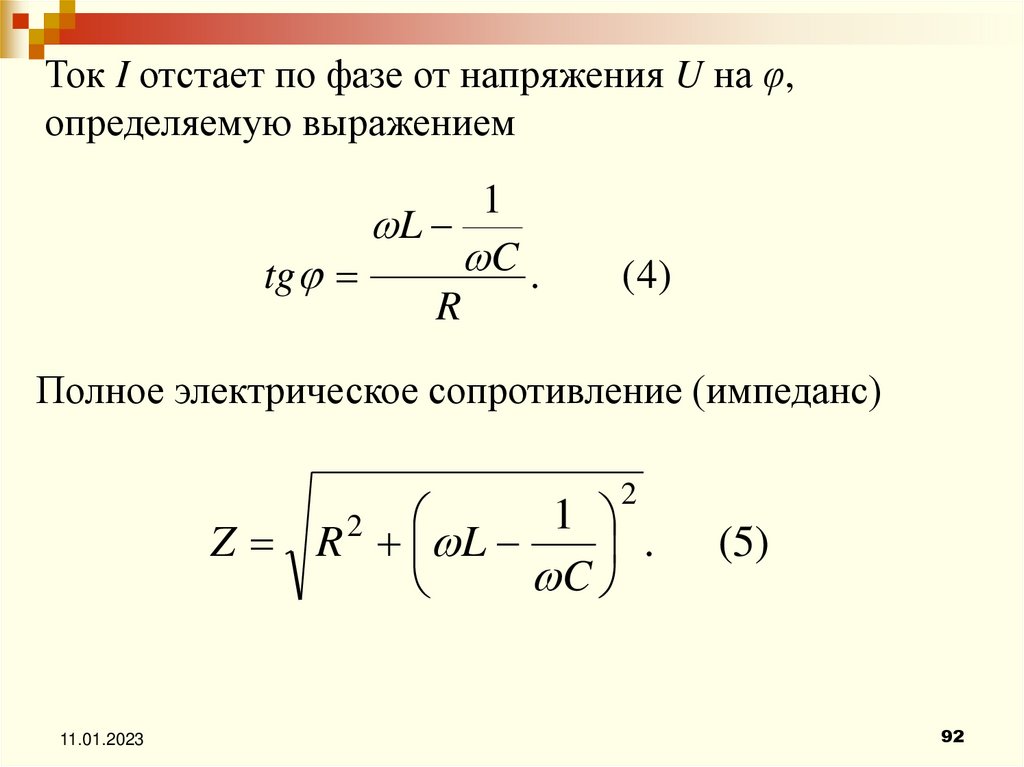
Ток I отстает по фазе от напряжения U на φ,определяемую выражением
1
L
C .
tg
R
( 4)
Полное электрическое сопротивление (импеданс)
2
1
Z R L
.
C
2
11.01.2023
(5)
92
93.
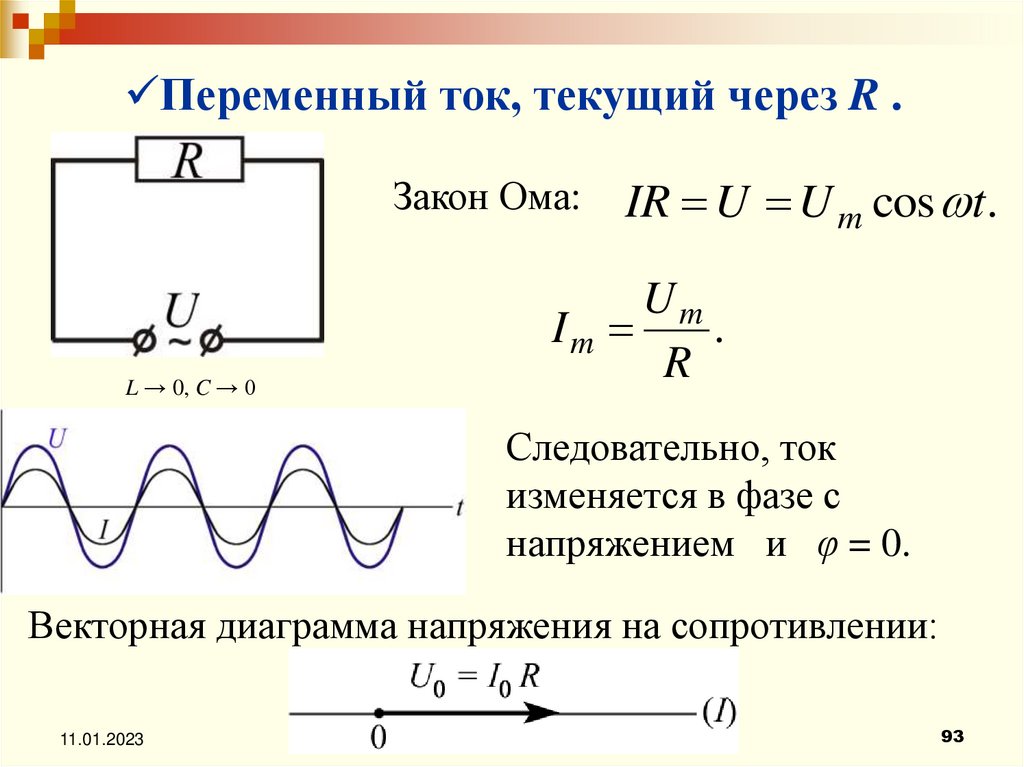
Переменный ток, текущий через R .Закон Ома:
L → 0, C → 0
IR U U m cos t.
Um
Im
.
R
Следовательно, ток
изменяется в фазе с
напряжением и φ = 0.
Векторная диаграмма напряжения на сопротивлении:
11.01.2023
93
94.
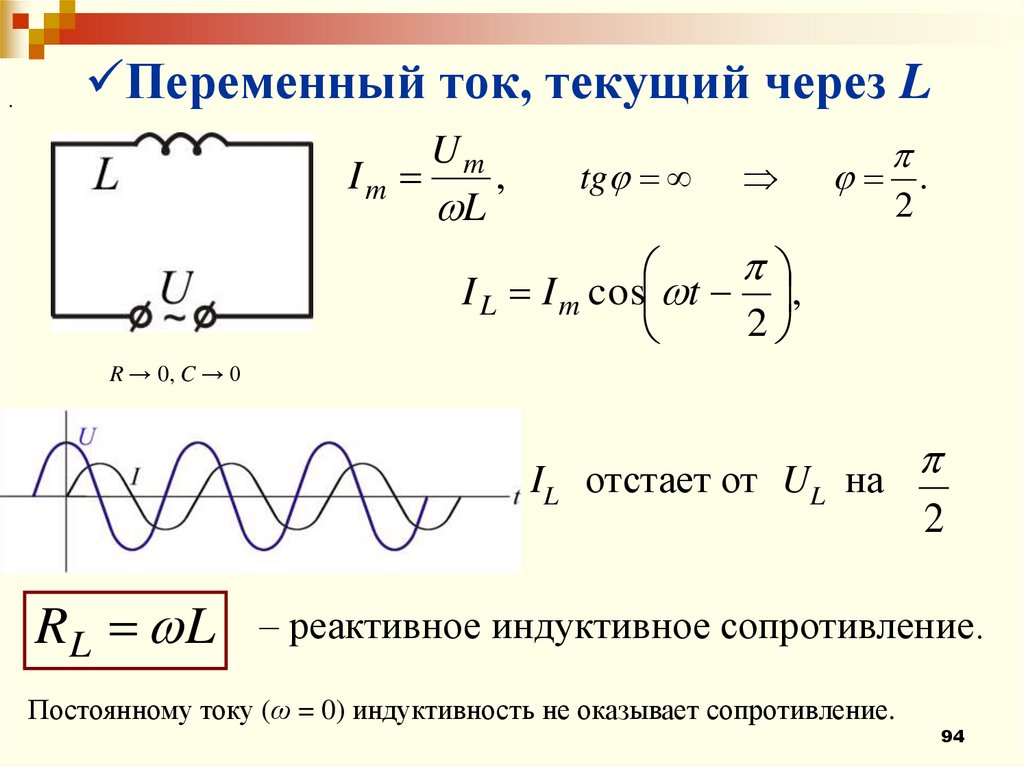
.Переменный ток, текущий через L
Um
Im
,
L
tg
.
2
I L I m cos t ,
2
R → 0, C → 0
IL отстает от UL на
R L L
2
– реактивное индуктивное сопротивление.
Постоянному току (ω = 0) индуктивность не оказывает сопротивление.
94
95.
.Переменный ток, текущий через C
Um
Im
,
1
C
R → 0, L → 0
tg
.
11.01.2023
2
I C I m cos t ( ) ,
2
IC опережает UC на
1
RC
C
2
– реактивное емкостное сопротивление.
95
96.
ImПри R = 0
Um
1
L
C
.
1
X L
RL RC – реактивное сопротивление.
C
Z R X
2
2
X
tg
R
11.01.2023
– полное сопротивление.
– фаза:
96
97.
Мгновенное значение мощности равно произведениюмгновенных значений U(t) и I(t)
P(t ) U (t ) I (t ) U m cos tI m cos t .
1
1
cos cos cos( ) cos( ).
2
2
1
1
P t U m I m cos U m I m cos 2 t .
2
2
сред. знач .
Среднее значение
11.01.2023
cos 2 t 0.
97
98.
Практическое значение представляет среднее значениемощности
1
P U m I m cos .
2
P(t) ~
cos 2 t ,
т.е. мгновенная мощность
колеблется около среднего
значения с частотой в 2
раза
превышающей
частоту тока.
11.01.2023
98
99.
Из векторной диаграммы видно, чтоU L
U
UR I R R
cos
.
U
I
U
U
I Z Z
Подставляем это выражение в формулу для среднего
значения мощности:
RI m2
1 UmImR 1 Um
P
ImR
.
2 Z
2
Z
2
φ
R
C
Im
Такую же мощность развивает постоянный ток, сила
которого равна
Im
I
2
– действующее (эффективное)
значение силы тока.
99
100.
Аналогично,Um
U
2
– действующее значение
напряжения.
Уравнение средней мощности можно записать в виде:
Um Im
1
P U m I m cos
cos UI cos .
2
2 2
cos
называется коэффициент мощности.
В технике стремятся сделать cos максимальным.
Если cos мал, то для выделения в цепи требуемой
мощности надо иметь большой ток, что приводит к
росту потерь в проводах.
Для промышленных установок cos 0,85.
100
101.
Распространение колебаний вупругой среде.
Поперечные и продольные волны
Волновой процесс (волна) – процесс распространения
колебаний в среде (волны на поверхности жидкости,
упругие волны, электромагнитные волны).
Основное свойство волны: перенос энергии без
переноса вещества, т.к. при распространении волны
частицы среды не двигаются вместе с волной, а
колеблются около своих положений равновесия.
11.01.2023
101
102.
Упругие (механические) волны – механическиевозмущения, распространяющиеся в упругой среде.
Тело называется упругим, а его деформации,
вызываемые внешними воздействиями, называются
упругими деформациями, если они полностью
исчезают после прекращения этих воздействий.
Газ, жидкость обладают только объёмной упругостью,
т.е. способностью сопротивляться изменению объёма.
Твёрдое тело – объёмная упругость и упругость
формы.
11.01.2023
102
103.
Звуковые (акустические) волны – упругие волны малойинтенсивности.
f = 16 ÷ 2·104 Гц – слышимый звук,
f < 16 Гц – инфразвук,
f > 2·104 Гц – ультразвук,
f > 109 Гц – гиперзвук.
Интенсивность звука (сила звука) – величина,
определяемая
средней
по
времени
энергией,
переносимой звуковой волной в единицу времени
сквозь
единичную
площадку,
расположенную
перпендикулярно направлению распространения волны:
W Вт
I , 2 .
St м
103
104.
Интенсивность звука – объективная характеристиказвуковой волны.
Чувствительность человеческого уха различна для
различных частот, поэтому вводят субъективную
характеристику звука, связанную с его интенсивностью,
и зависящую от частоты: громкость звука.
Физиологический закон Вебера – Фехнера: с ростом
интенсивности звука громкость возрастает по
логарифмическому закону.
11.01.2023
104
105.
По измеренному значению интенсивности звука(объективная характеристика) вводят объективную
оценку громкости звука (субъективная характеристика)
– уровень интенсивности звука:
I
L lg , бел 10 децибел ,
I0
I0 – интенсивность звука на пределе слышимости,
I0 = 10–12 Вт/м2.
11.01.2023
105
106.
Упругая волна называется продольной, если частицы средыколеблются в направлении распространении волны.
Продольные волны связаны с объёмной деформацией
упругой среды, следовательно, могут распространяться в
любой среде – твёрдой, жидкой, газообразной.
Упругая волна называется поперечной, если частицы среды
колеблются, оставаясь в плоскостях, перпендикулярных к
направлению распространения волн.
Они связаны с деформацией сдвига упругой среды,
следовательно, распространяются в средах, обладающих
упругостью формы, т.е. твёрдых телах.
Поверхностные волны – волны, распространяющиеся вдоль
свободной поверхности (жидкости). Возмущения этой
поверхности
возникают
под
влиянием
внешних
воздействий.
106
107.
Бегущая волнаБегущая волна – волна, которая в отличие от стоячих
волн, переносит энергию в пространстве.
Луч – линия, касательная к которой в каждой её точке
совпадает с направлением распространения волны.
Уравнение упругой волны – зависимость от
координаты и времени скалярных или векторных
величин, характеризующих колебания среды при
прохождении в ней волны.
11.01.2023
107
108.
Механические возмущения распространяются в упругойсреде с конечной скоростью υ. Поэтому возмущение
достигает произвольной точки среды через время
l
t , где l – расстояние от источника волны до
v
точки. Следовательно, колебания в точке отстают по
фазе от колебаний источника волн.
Волновой фронт – геометрическое место точек, до
которых доходят колебания к моменту времени t.
Волновая поверхность – геометрическое место точек,
в которых фаза колебаний имеет одно и то же значение
(в простейшем случае плоская или сферическая).
В однородной изотропной среде волновые поверхности
ортогональны лучам.
108
109.
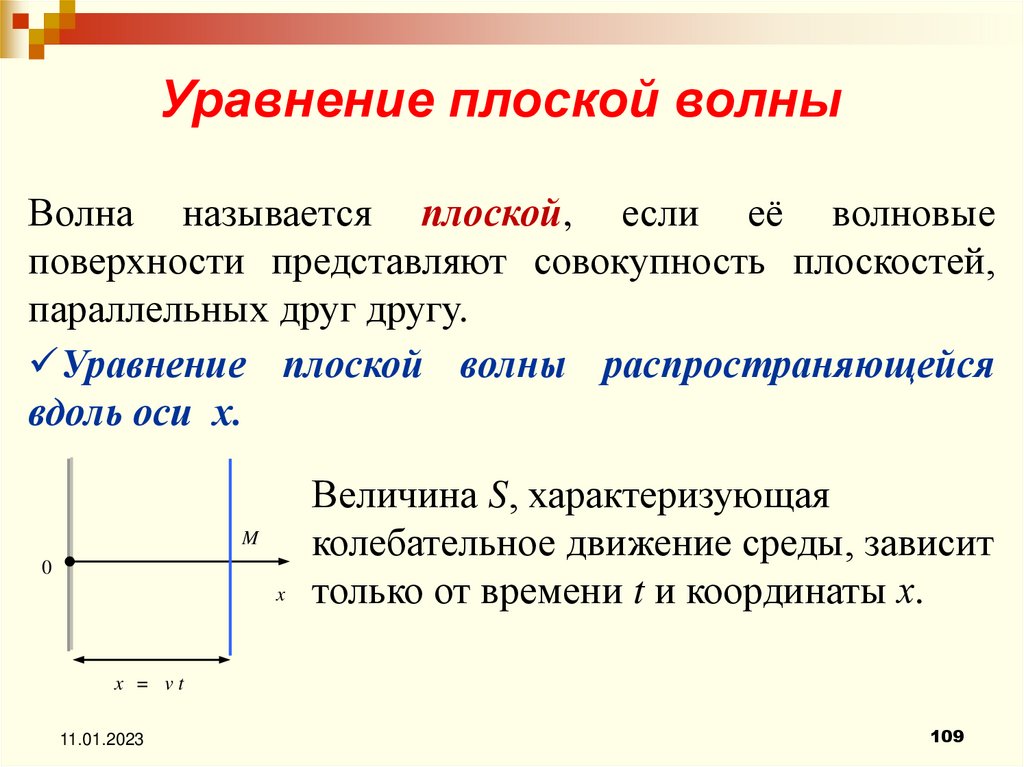
Уравнение плоской волныВолна называется плоской, если её волновые
поверхности представляют совокупность плоскостей,
параллельных друг другу.
Уравнение плоской волны распространяющейся
вдоль оси х.
Величина S, характеризующая
M
колебательное движение среды, зависит
x только от времени t и координаты х.
0
x = vt
11.01.2023
109
110.
Колебания в точке М отличаются от колебаний в точке 0только тем, что они сдвинуты по времени на x/υ.
Следовательно, S является функцией (t – x/ υ) и
уравнение плоской волны, распространяющейся
вдоль x, принимает вид:
x
S f t
Уравнение плоской гармонической волны,
распространяющейся вдоль x:
x
S Acos t 0
11.01.2023
110
111.
Расстояниена которое распространяется
T ,
волна за время равное периоду Т, называется длиной
волны – расстояние между ближайшими точками,
колеблющимися в одной фазе.
Для характеристики волн используется волновое число
2
2
k
T
Тогда:
S Acos t х 0 Acos t kx 0 .
11.01.2023
111
112.
Скорость распространения гармонической волныхарактеризуется фазовой скоростью. Она равна
скорости перемещения в пространстве точек
поверхности,
соответствующих
любому
фиксированному значению фазы гармонической
волны.
t
dx
t kx 0 const x const
.
k
dt k
Это скорость перемещения фазы волны, поэтому её и
называют фазовой скоростью.
11.01.2023
112
113.
Уравнение плоской волны,распространяющейся в произвольном
направлении
к
n – единичный вектор нормали
у
волновой поверхности, n 1.
n
r
φ
0
х
l
11.01.2023
l
S Acos t 0 ,
n r 1 rcos l.
113
114.
n rS Acos t
0 Acos t k n r 0
k
S Acos t k r 0 .
k kn – волновой вектор.
Формула Эйлера: ei cos isin .
Физический смысл имеет только действительная часть
комплексной функции S~ : ReS~ Acos t .
S Ae
i t kr 0
.
Такая запись уравнения волны удобна для дифференцирования.
11.01.2023
114
115.
Распространение волн в однородной изотропной среде(физические свойства среды одинаковы во всех точках и
во всех направлениях) описывается дифференциальным
уравнением в частных производных, которое
называется волновым уравнением:
2S 2S 2S 1 2S
1 2S
2 2 2 2 или S 2 2 ,
2
x
y
z
t
t
2
2
2
2 2 2 – оператор Лапласа.
x
y
z
В частности это уравнение описывает плоскую волну,
распространяющуюся вдоль оси х:
2
2
S 1 S
2 2.
2
x
t
11.01.2023
115
116.
Энергия упругой волны.Вектор Умова
Рассмотрим продольную плоскую волну в твердой среде:
Деформация среды в плоскости х:
(взят символ частной производной,
т.к. s = s(x,t))
Нормальное напряжение
пропорционально деформации
(для малых деформаций):
s
x
s
E E
x
где Е – модуль Юнга среды.
11.01.2023
116
117.
•В положениях максимального отклонения частиц отположения равновесия (∂s/∂x = 0) ε = 0, σ = 0
• В местах прохождения частиц через положения
равновеси ε, σ - максимальны
(с чередованием ±ε,
т.е. растяжений и сжатий)
Процесс
распространения
продольной упругой
волны
11.01.2023
117
118.
Скорость продольной волны связана схарактеристиками среды следующим образом:
E
υ
ρ
,
где ρ – плотность среды.
Скорость поперечной волны
G
, G – модуль
υ
ρ сдвига.
w A sin ( t kx )
2
2
2
- плотность энергии упругой волны (как поперечной,
так и продольной) в каждый момент времени в разных
точках пространства различна.
118
119.
Среднее по времени значение плотности энергии вкаждой точке среды
1 2 2
w A 0 .
2
Скорость переноса энергии волной равна скорости
перемещения
в
пространстве
поверхности,
соответствующей максимальному значению объёмной
плотности волны w.
Для гармонической волны эта скорость равна фазовой
скорости.
11.01.2023
119
120.
Поток энергии dФw сквозь малую площадку dS –отношение энергии dW, передаваемой через эту
площадку за малый промежуток времени dt, к его
величине dt:
dW
dФw
Поток
dW
dФw
w dS j dS ,
dt
где j w
11.01.2023
dt
.
– вектор плотности потока
энергии (вектор Умова)
120
121.
Интенсивность волны – среднее значение плотностипотока энергии, переносимой волной (среднее значение
вектора Умова).
1 2 2
j w A 0 .
2
Преобразование энергии волны в другие виды энергии,
происходящее при распространении волны в среде,
называется поглощением волн.
A x A0 e
x
, α
–
линейный
коэффициент
поглощения, зависит от свойств среды и частоты волн.
Дисперсия волн – зависимость фазовой скорости
гармонической волны в среде от их частоты.
11.01.2023
121
122.
Интерференция волн.Стоячие волны
Две волны называются когерентными, если разность их
фаз не зависит от t.
Интерференция волн – явление наложения волн, при
котором происходит устойчивое во времени их
взаимное усилие в одних точках пространства и
ослабление в других в зависимости от соотношения
между фазами этих волн.
11.01.2023
122
123.
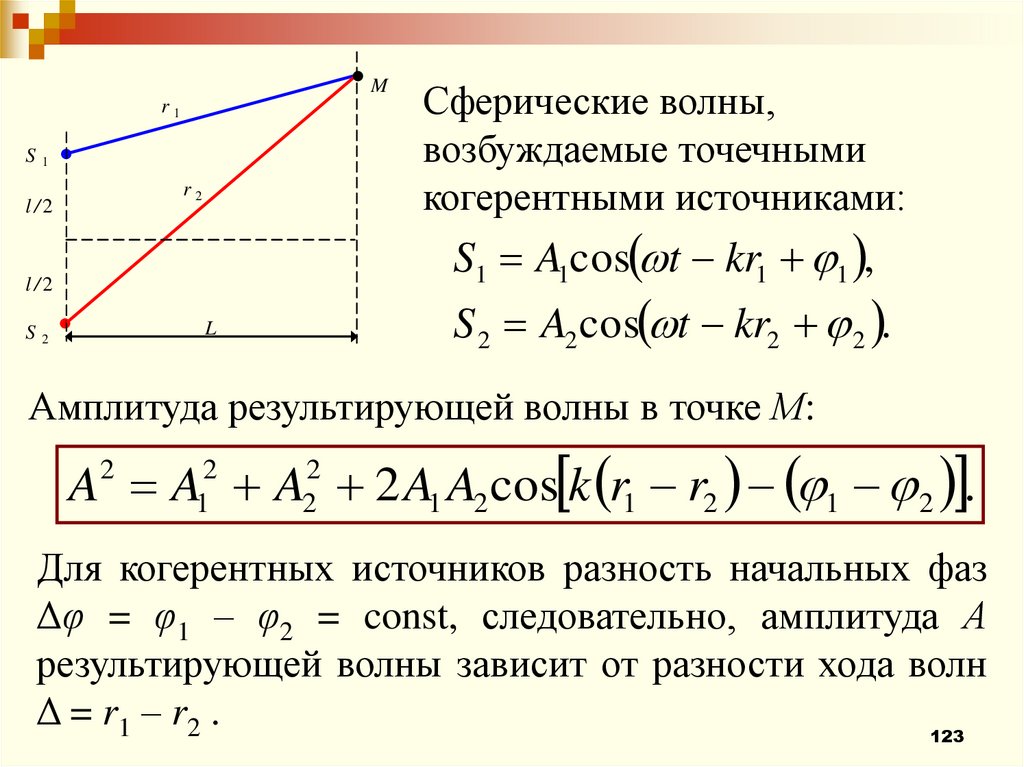
Mr1
S1
l/2
r2
S1 A1cos t kr1 1 ,
l/2
S2
Сферические волны,
возбуждаемые точечными
когерентными источниками:
L
S 2 A2 cos t kr2 2 .
Амплитуда результирующей волны в точке М:
A2 A12 A22 2 A1 A2 cos k r1 r2 1 2 .
Для когерентных источников разность начальных фаз
Δφ = φ1 – φ2 = const, следовательно, амплитуда А
результирующей волны зависит от разности хода волн
Δ = r 1 – r2 .
123
124.
k r1 r2 1 2 2m ,m 0,1,2...
–
интерференционный
максимум А = А1 + А2.
k r1 r2 1 2 2m 1
– интерференционный
минимум А = А1 – А2.
Частным случаем интерференции волн являются
стоячие волны – волны, образующиеся в результате
наложения 2-х бегущих гармонических волн, которые
распространяются навстречу друг другу и имеют
одинаковые А и ω.
11.01.2023
124
125.
S1 Acos t kx ,S 2 Acos t kx .
2 x
S S1 S 2 2 Acoskxcos t 2 Acos
cos t .
Aст
Аст(х) – амплитуда стоячей волны, в отличие от
амплитуды бегущей волны, является функцией только
координаты
Аст 2 Аcos
11.01.2023
2 x
.
125
126.
Точки среды, где2 x
m , Аст 2 А max,
называются пучностями.
2 x
1
m , Аст 0 min,
Точки среды, где
2
называются узлами.
Координаты пучностей
Координаты узлов
xп m .
2
1
x узл m .
2 2
Расстояние между двумя соседними пучностями и двумя
соседними узлами одинаковое и равно λ/2.
126
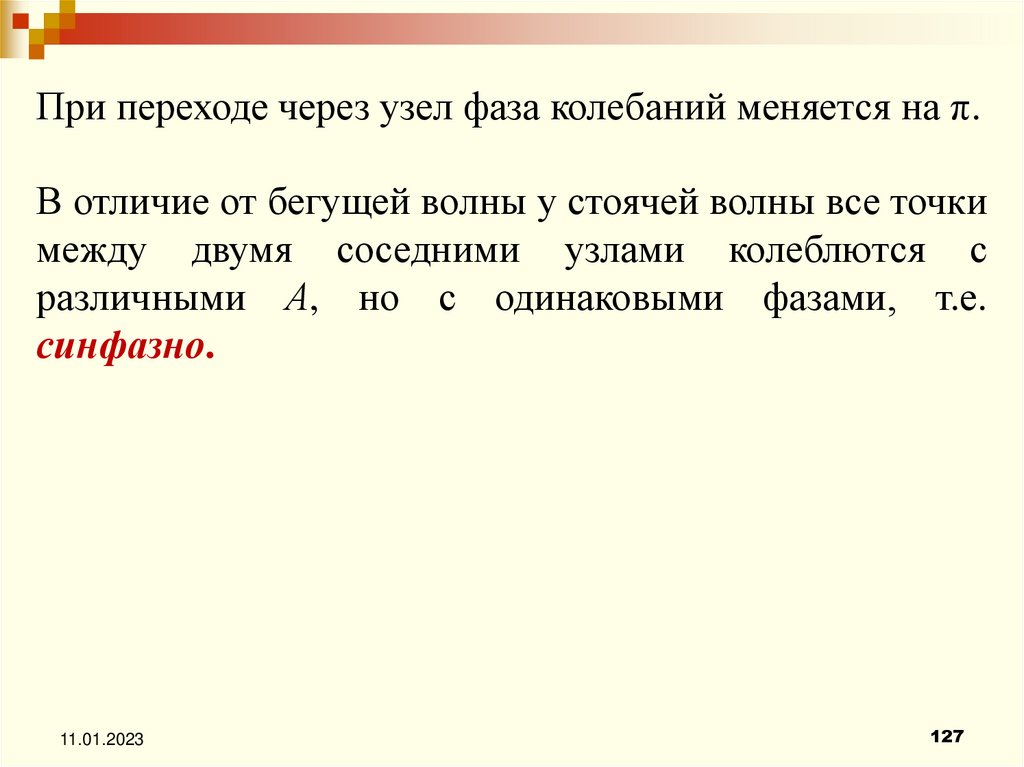
127.
При переходе через узел фаза колебаний меняется на π.В отличие от бегущей волны у стоячей волны все точки
между двумя соседними узлами колеблются с
различными А, но с одинаковыми фазами, т.е.
синфазно.
11.01.2023
127
128.
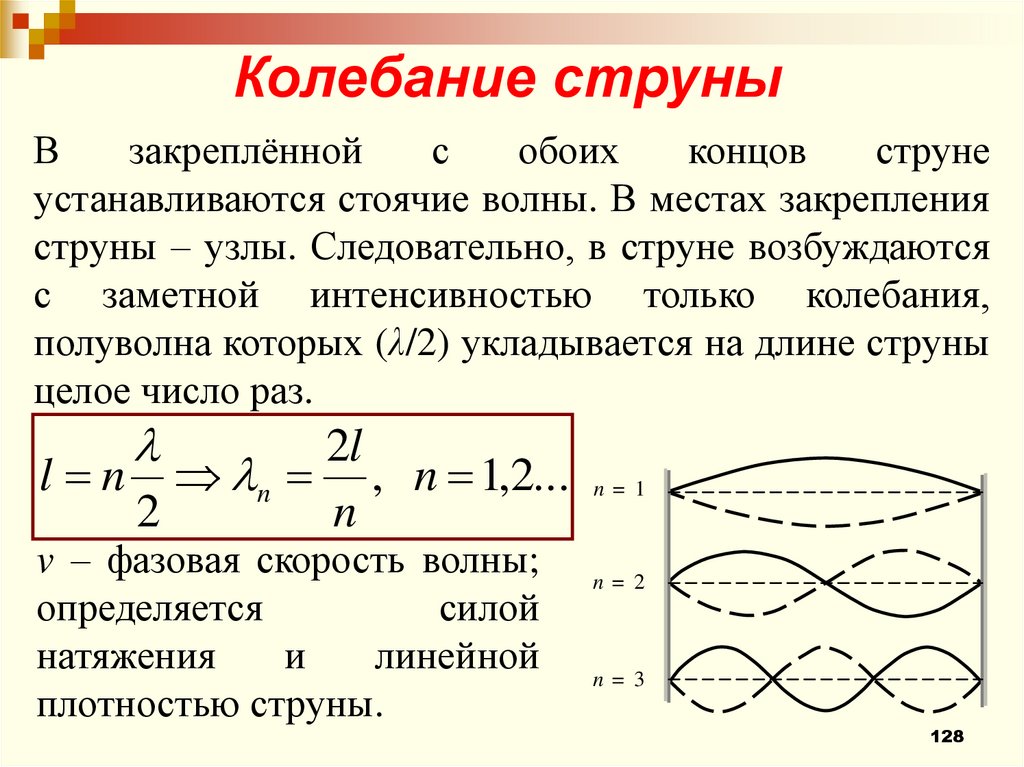
Колебание струныВ
закреплённой
с
обоих
концов
струне
устанавливаются стоячие волны. В местах закрепления
струны – узлы. Следовательно, в струне возбуждаются
с заметной интенсивностью только колебания,
полуволна которых (λ/2) укладывается на длине струны
целое число раз.
2l
l n n , n 1,2... n = 1
2
n
v – фазовая скорость волны;
определяется
силой
натяжения
и
линейной
плотностью струны.
n=2
n=3
128
129.
v – фазовая скорость волны; определяется силойнатяжения и линейной плотностью струны.
v
v
n n
n 2l
v
1
2l
11.01.2023
–
собственные
частоты,
им
соответствуют
собственные
колебания – гармоники.
– основная частота (самая низкая
частота).
129
130.
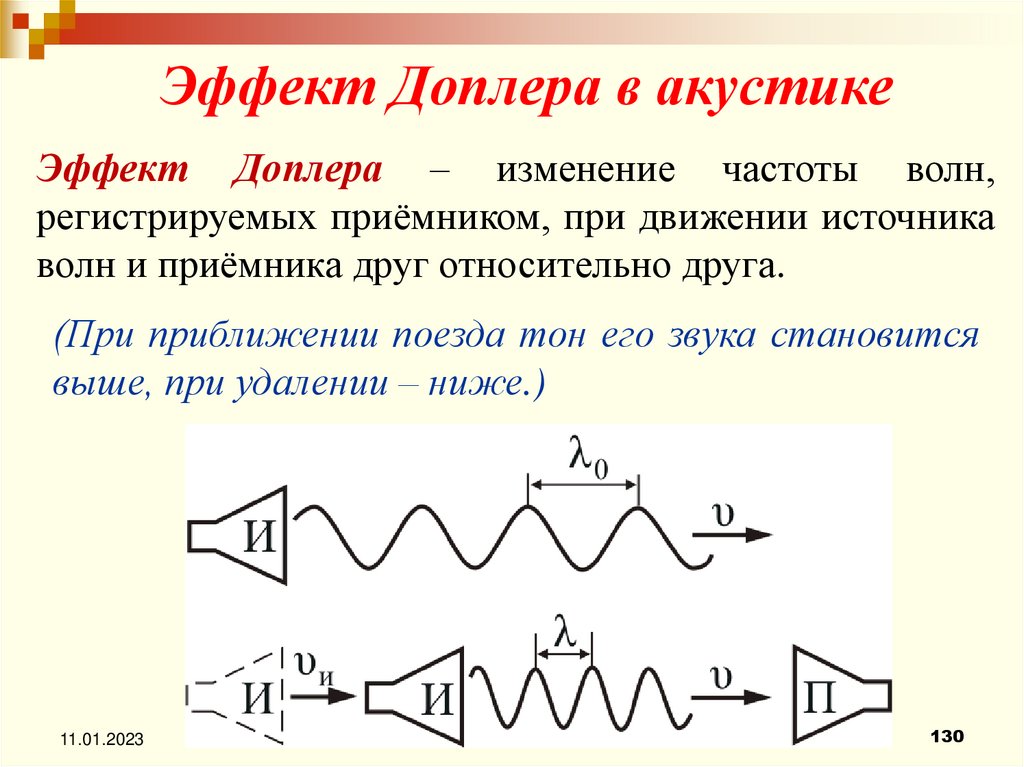
Эффект Доплера в акустикеЭффект Доплера – изменение частоты волн,
регистрируемых приёмником, при движении источника
волн и приёмника друг относительно друга.
(При приближении поезда тон его звука становится
выше, при удалении – ниже.)
11.01.2023
130
131.
Источник и приёмник покоятся υист = υпр = 0.Длина волны 0 T
, υ – скорость звука в
0
среде (фазовая скорость).
Частота волн, регистрируемых приёмником,
0 .
0 T
Частота звука ν, которую зарегистрирует приемник,
равна частоте ν0, с которой звуковая волна излучается
источником.
11.01.2023
131
132.
Приёмник приближается к источникуυпр > 0, υист = 0.
Длина волны в среде
0 .
0
Скорость
распространения
приёмника равна υ + υпр.
волн
относительно
пр пр пр
пр
0 ,
0 0 1
0
T
т.е. частота колебаний, воспринимаемых приемником,
больше частоты колебаний источника
11.01.2023
132