













 physics
physics mechanics
mechanicsSimilar presentations:


")
")
")





Лекция 1. Кинематика
1.
1. КИНЕМАТИКА1.1 ОСНОВНЫЕ ПОНЯТИЯ И ОПРЕДЕЛЕНИЯ
Кинематикой называют раздел механики, изучающий способы (не
причины!) описания движений и связь между величинами,
характеризующими эти движения.
МОДЕЛИ МЕХАНИЧЕСКИХ СИСТЕМ:
Материальная точка (МТ) – любой объект, формой и размерами
которого в данной задаче (в данных условиях) можно пренебречь;
Набор конечного числа материальных точек – достаточно общая
модель произвольной механической системы.
Абсолютно твёрдое тело (АТТ) – тело, форма и размеры которого
при наличии тех воздействий, что описаны в условиях задачи, могут
считаться неизменными. АТТ можно рассматривать как набор
материальных точек с неизменными расстояниями между ними.
Тело отсчёта, жёстко связанная с ним система координат и часы
образуют систему отсчёта (СО).
2.
Y0
X
Z
K
Рис.1.1
О – начало координат (начало отсчёта); K – название системы отсчёта.
Положение МТ в пространстве в определённый момент времени задаётся
тремя её координатами (например, декартовыми,) или радиус-вектором :
rx x , ry y , rz z .
(1.1)
При движении МТ её координаты становятся функциями времени:
x x(t ) , y y (t ), z z (t ).
(1.2 а, б, в)
Аналогично,
(1.3)
r r (t ) .
Закон движения МТ– правило, по которому можно определить её положение в
любой момент времени.
P.S. Закон движения (1.2 а, б, в) можно рассматривать как уравнения
траектории, заданной в параметрическом виде (в роли параметра t).
3.
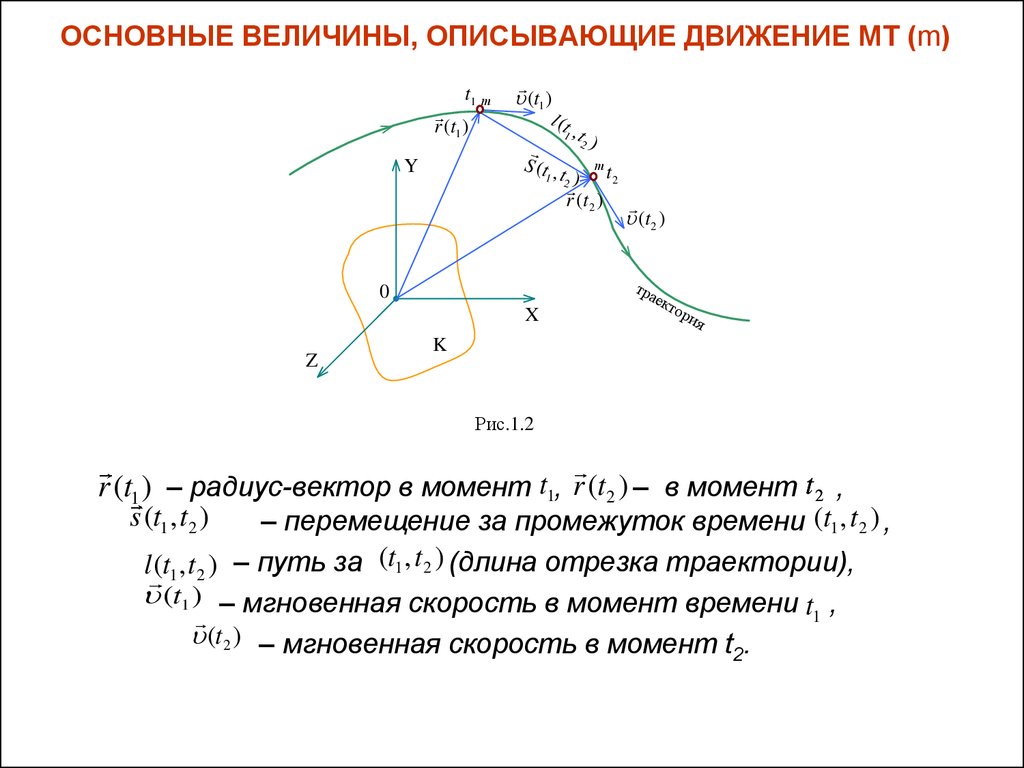
ОСНОВНЫЕ ВЕЛИЧИНЫ, ОПИСЫВАЮЩИЕ ДВИЖЕНИЕ МТ (m)t1 т
r (t1 )
Y
(t1 )
l (t
1 ,t
2)
т
S (t , t
t2
1 2)
r (t 2 )
(t2 )
0
X
Z
тр а
ект
ор
ия
K
Рис.1.2
t
r
r (t1 ) – радиус-вектор в момент 1, (t2 ) – в момент t 2 ,
s (t1 , t2 )
– перемещение за промежуток времени (t1 , t 2 ) ,
l (t1 , t 2 ) – путь за (t1 , t 2 ) (длина отрезка траектории),
(t1 ) – мгновенная скорость в момент времени t ,
1
(t2 ) – мгновенная скорость в момент t .
2
4.
PS. Векторы скорости (t1 ) и (t2 ) – касательные к траектории.Очевидно:
s (t1 , t 2 ) r (t 2 ) r (t1 ) r
.
(1.4)
При малых t t2 t1 очевидно, что
s (t1, t2 ) l (t1, t2 ) .
(1.5)
Средняя скорость
s (t1,t2 ) Δr
υср(t1,t2 )
t2 t1
Δt .
Мгновенная скорость
r
(t ) lim ср ( t, t t ) lim .
t 0
t 0 t
(1.6)
(1.7 а)
PS. Другой вид математической записи («точка» обозначает
производную по времени)
dr
(t )
r .
(1.7 б)
dt
Средняя путевая скорость
l( t ,t ) l
ср( ) 1 2
,
(1.8)
t2 t1
t
l l (t2 , t1 ) – путь, пройденный за t t2 t1. При t 0 получаем:
5.
Мгновенная путевая скорость (при tИли
0 ):
l .
t 0 t
dl
( )
.
dt
(1.9)
( ) lim
(1.10)
Из (1.5), (1.6), (1.7а), (1.8) и (1.9), следует, что мгновенная путевая скорость совпадает
с модулем вектора мгновенной скорости (подумать!):
( )
.
(1.11)
Среднее ускорение за промежуток времени (t1 , t 2 )
υ (t 2 )-υ (t1 )
aср (t1 ,t 2 )
.
t 2 -t1
t
Мгновенное ускорение (в момент t ) :
d .
a (t )
dt
Очевидно:
d 2 r .
a r 2
dt
:
(1.12)
(1.13)
(1.14)
r
PS.1 Если закон движения задан, например, известна зависимость (t ) , то
мы имеем о движении полную информацию, и все величины,
определённые равенствами (1.6) – (1.14) легко вычисляются, точно так
же, как и их проекции на декартовы оси.
r (t ) (t )
PS.2 Переход
и
выполняется с помощью
(t ) a (t )
дифференцирования.
6.
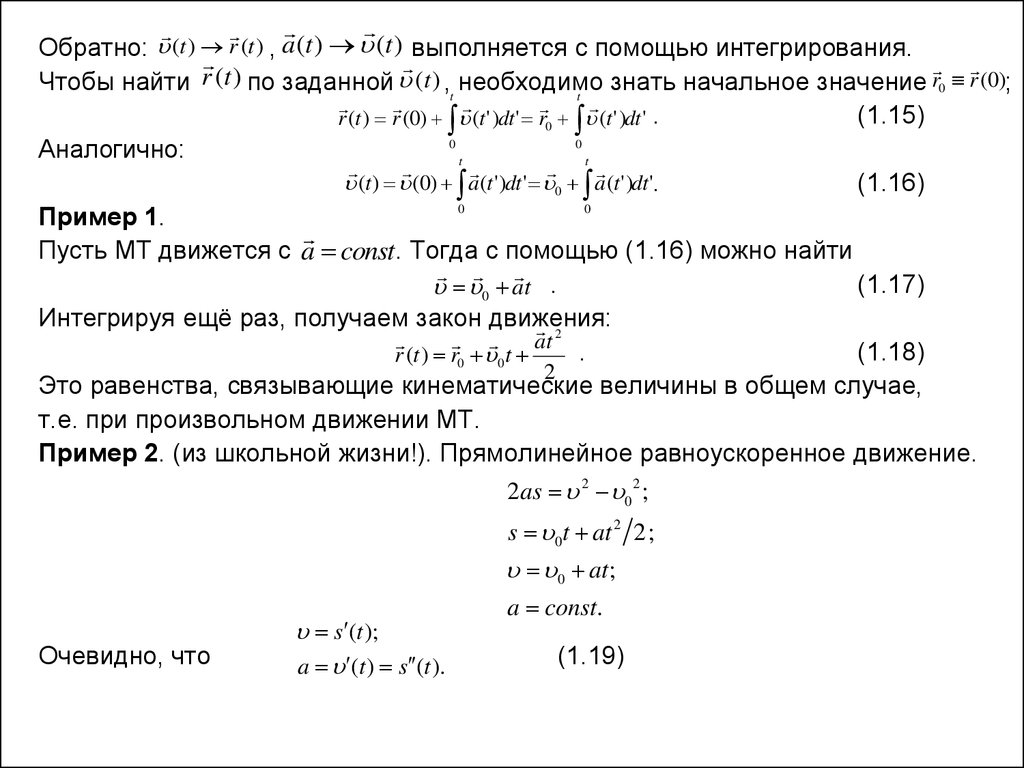
r (t ) , a (t ) (t ) выполняется с помощью интегрирования.Обратно: (t )
r0 r (0);
Чтобы найти r (t ) по заданной (t ) ,t необходимо
знать
начальное
значение
t
(1.15)
r (t ) r (0) (t ' )dt ' r0 (t ' )dt ' .
0
0
Аналогично:
t
t
(t ) (0) a (t ' )dt ' 0 a (t ' )dt '.
(1.16)
0
0
Пример 1.
Пусть МТ движется с a const. Тогда с помощью (1.16) можно найти
(1.17)
0 at .
Интегрируя ещё раз, получаем закон движения:
at 2
.
(1.18)
r (t ) r0 0t
2
Это равенства, связывающие кинематические величины в общем случае,
т.е. при произвольном движении МТ.
Пример 2. (из школьной жизни!). Прямолинейное равноускоренное движение.
2as 2 0 2 ;
s 0t at 2 2;
0 at ;
Очевидно, что
s (t );
a (t ) s (t ).
a const.
(1.19)
7.
Векторные равенства можно записать в проекциях на осикоординат:
,
(1.20а,б)
x ,
dx
( x )ср
x
t
dt
d x
x
a
( a x )ср
x
(1.21а,б)
dt ,
t ,
t
x( t ) x0 x ( t )dt
,
(1.22)
0
t
x ( t ) 0 x ax ( t )dt
0
и т.д.
(1.23)
8.
1.2. КРИВОЛИНЕЙНОЕ ДВИЖЕНИЕ МАТЕРИАЛЬНОЙ ТОЧКИ НАПЛОСКОСТИ. УСКОРЕНИЕ ПРИ КРИВОЛИНЕЙНОМ
ДВИЖЕНИИ: ТАНГЕНЦИАЛЬНОЕ И НОРМАЛЬНОЕ
УСКОРЕНИЯ.
d .
a (t )
dt
Итак
Очевидно, при криволинейном движении ускорение материальной точки отлично от
нуля, т.к. вектор скорости изменяется по величине и по направлению.
Представим вектор скорости МТ в виде
где
1
.
(1.25)
т.е.
– единичный вектор, направленный по скорости
Продифференцируем уравнение (1.24),:
d d
d
a
.
dt
dt
dt
Обозначим:
(1.24)
d
a
dt
d
an
dt
,
.
(1.26)
(1.27)
.
(1.28)
9.
Тогда:a
a an .
(1.29)
– касательное или тангенциальное
Первое слагаемое в (1.29) a
ускорение:
d 0
,
a при
dt
при d 0 .
a
dt
Второе слагаемое - an называется нормальной составляющей,
(1.30а)
(1.30б)
она нормальна, т.е. перпендикулярна, к вектору скорости (см. ниже!).
(t dt )
(t dt )
(t )
(t )
Рис.1.3
10.
(t dt ) dd
(t )
.
d
Рис.1.4
Можно считать:
d (t ).
(1.31)
Рассматривая этот треугольник как бесконечно малый сектор, имеем
d
d .
(1.32)
d d .
(1.33)
Но 1 . Отсюда
11.
Если ввести бесконечно малый вектор поворота d, направление
которого указано на рисунке 1.4 – «к нам», – то будем иметь с учётом
(1.31) и (1.33):
(1.34)
d d ,
Таким образом, (см. (1.31), (1.28)),
an
(1.35)
Следовательно, равенство (1.29) – разложение вектора ускорения на две
взаимно перпендикулярные составляющие.
Далее, an можно представить в виде
d d
a n , ,
dt dt
Направления a , a n , a в случае d
dt
0 показаны на рисунке 1.5.
a
an
.
Рис.1.5
(1.36)
a
12.
Если считать малый отрезок криволинейной траектории частьюокружности, то величина
d
(1.37)
dt
называется вектором
угловой скорости.
Вектор определяет как направление поворота, так и величину
угла поворота радиуса-вектора за единицу времени.
Направление движения МТ по окружности и направление
связаны правилом буравчика.
13. 1.3 НЕРАВНОМЕРНОЕ ДВИЖЕНИЕ ПО ОКРУЖНОСТИ. УГЛОВАЯ СКОРОСТЬ И УГЛОВОЕ УСКОРЕНИЕ. СВЯЗЬ МЕЖДУ ЛИНЕЙНЫМИ И УГЛОВЫМИ ВЕЛИЧИНАМИ. РАДИУС КРИВИЗН
1.3 НЕРАВНОМЕРНОЕ ДВИЖЕНИЕ ПО ОКРУЖНОСТИ. УГЛОВАЯСКОРОСТЬ И УГЛОВОЕ УСКОРЕНИЕ. СВЯЗЬ МЕЖДУ ЛИНЕЙНЫМИ И
УГЛОВЫМИ ВЕЛИЧИНАМИ. РАДИУС КРИВИЗНЫ ПЛОСКОЙ ТРАЕКТОРИИ.
r (t dt )
O
.
d
d
r (t )
dr
Рис.1.6
Рассмотрим окружность радиуса r , по которой движется материальная
точка (рис.1.6).
(
t
)
const
PS.
. При движении против часовой стрелки направлена
«к нам», по часовой – «от нас».
r
d
r
r
За время
dt радиус-вектор
изменится на
: от значения (t )
до значения r (t dt ) . Используя аналогию треугольников, построенных
из векторов, которые показаны на рис. 1.4 и 1.6, нетрудно получить
равенство, аналогичное соотношению (1.34):
(1.40)
dr d , r .
14.
Поделив обе части (1.40) наdt , будем иметь
, r .
(1.41)
Дифференцируя (1.41), находим ускорение:
d
(1.42)
a
, r ,
dt
Второе слагаемое в (1.42) ( см. (1.36) ) есть нормальное ускорение:
Тогда первое, очевидно, равно
a :
, a n
.
(1.43)
d .
(1.44)
a
,r
dt
Введём новое определение: угловым ускорением МТ назовём величину
d .
dt
(1.45)
15.
Теперь ускорение её запишется с учётом (1.41) в видеa , r , r .
(1.46)
Двойное векторное произведение в (1.46) вычислим по известной
математической формуле
,
a b ,c b ( a ,c ) c ( a ,b )
(1.47)
,r ,r r , .
(1.48)
что даёт
Учитывая, что r, получаем:
, r 2r .
(1.49)
Таким образом, в разложении (1.29)
a a an
слагаемые имеют вид:
a , r ,
an 2 r .
(1.50 а,б)
Очевидно, нормальная составляющая ускорения – это хорошо известно
из школьного курса центростремительное ускорение.
Ускорение материальной точки , движущейся по окружности, называют
также полным ускорением.
16.
Рассмотрим аналогию между ускоренными прямолинейным икриволинейным движениями (на примере МТ, движущейся по окружности).
e
r
Y
.
OZ
X
Рис.1.7
e
Ось OZ направлена «к нам», – единичный вектор, указывающий
направление отсчёта положительных углов, которое связано с
направлением OZ правилом буравчика
Для движения вдоль оси OX имеем
2
dx , a d x d x .
x
2
x
dt
dt
dt
(1.51а, б)
17.
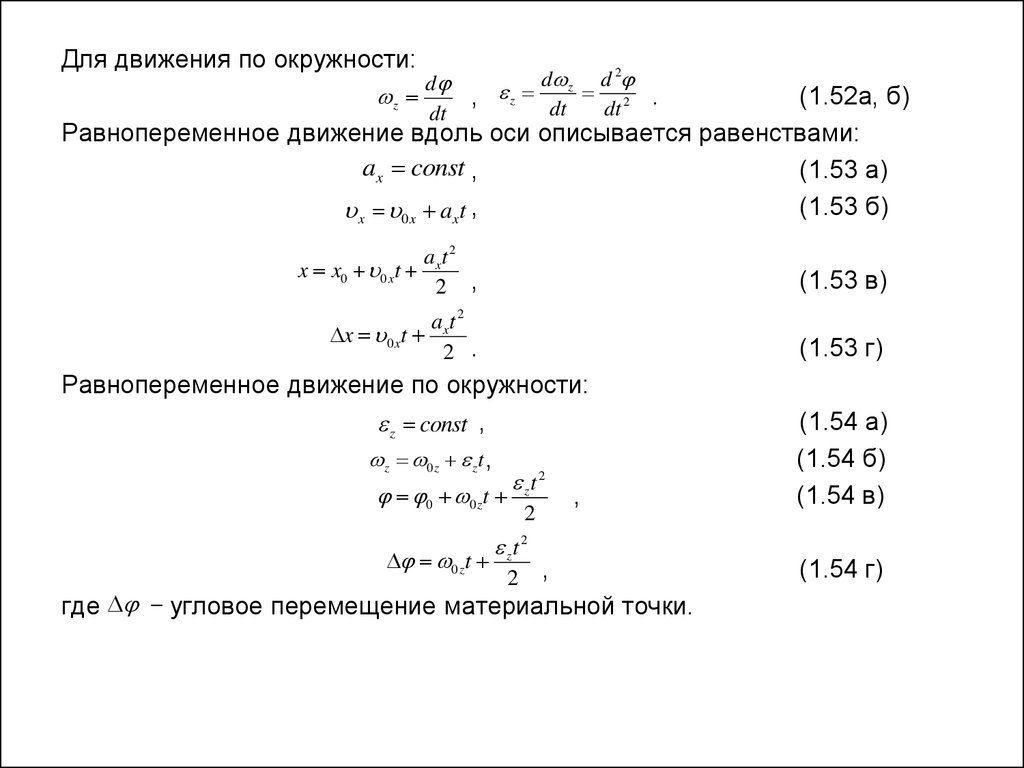
Для движения по окружности:d z d 2
d
z
, z dt dt 2 .
dt
(1.52а, б)
Равнопеременное движение вдоль оси описывается равенствами:
ax const ,
(1.53 а)
(1.53 б)
x 0 x axt ,
axt 2
x x0 0 xt
2 ,
(1.53 в)
axt 2
x 0 xt
2 .
(1.53 г)
Равнопеременное движение по окружности:
z const ,
z 0 z zt ,
zt 2
0 0 zt
,
2
0 zt
zt 2
,
где – угловое перемещение материальной точки.
2
(1.54 а)
(1.54 б)
(1.54 в)
(1.54 г)
18.
Таблица соответствия линейных и угловых величинлинейные
dr
a
x
x
ax
угловые
d
z
z
Уравнения, связывающие линейные и угловые переменные,
характеризующие движение МТ по окружности ( r R) :
,
(1.55а, б)
d
r
d R ;
dr d , r
(1.56а, б, в)
z R ;
R,
, r ,
a , r ,
a R ,
(1.57а, б, в)
a z R ;
Здесь , a – проекции скорости и ускорения на вектор e ,
, a a ;
(1.58 а, б)
2
.
(1.59 а, б)
an 2 r ,
an 2 R
R
Малую окрестность точки плоской криволинейной траектории
материальной точки можно рассматривать как малую дугу некоторой
окружности. Радиус этой окружности – радиус кривизны траектории
в окрестности данной точки, Rкр . Эта величина удовлетворяет
равенству аналогичному (1.59 б).
an
2
Rкр .
(1.60)