


 ОиXиYиZи : ось ОиXи лежит в плоскости небесного экватора (условно можно считать, что он")
, относительно")



 physics
physicsSimilar presentations:
")









Типовые наблюдения при испытаниях инерциальных навигационных систем (ИНС). Лекция 6.9
1.
6.9. Типовые наблюдения при испытанияхинерциальных навигационных систем (ИНС)
2.
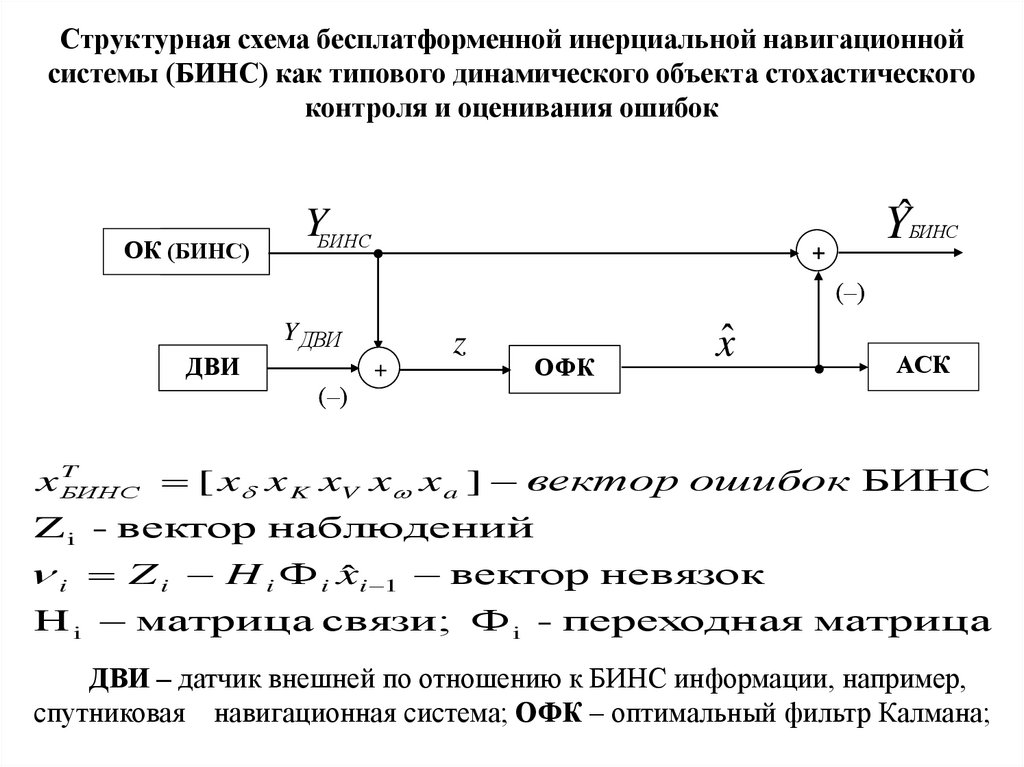
Структурная схема бесплатформенной инерциальной навигационнойсистемы (БИНС) как типового динамического объекта стохастического
контроля и оценивания ошибок
ОК (БИНС)
БИНС
YБИНС
Yˆ
БИНС
+
(–)
Y ДВИ
ДВИ
z
+
ОФК
x̂
АСК
(–)
T
x БИНС
[ x x K xV x x a ] вектор ошибок БИНС
Z i - вектор наблюдений
i Zi Hi i x
ˆ i 1 вектор невязок
H i матрица связи; i - переходная матрица
ДВИ – датчик внешней по отношению к БИНС информации, например,
спутниковая навигационная система; ОФК – оптимальный фильтр Калмана;
3.
Прогноз:Коррекция:
m0 xˆi / i 1 Фi xˆi 1 / i 1
(4.12)
~
M 0 Pi / i 1 Φi Pi 1 / i 1ΦiT Qi
(4.13)
ν j z j Н j m j 1
(4.14)
j H j M j 1 H Tj R j
(4.15)
K j М j 1 H Tj / j
(4.16)
m j m j 1 K j j
(4.17)
M j M j 1 K j H j M j 1;
xˆi / i ml ;
Pi / i M l
j 1, l
(4.18)
(4.19)
4. 6.9.1 Технология координатных преобразований. Необходима для согласования сигналов ОК и ДВИ при формировании наблюдений
НИСЗНИСЗ
НИСЗ
НИСЗ
Z
PN
H
N
B
E
λ L
B
Y
О
L
X
oENH сопровожда ющий трехгранник
5. Инерциальная система координат (СК) ОиXиYиZи : ось ОиXи лежит в плоскости небесного экватора (условно можно считать, что он
совпадает с земным экватором) и направлена в точку весеннегоравноденствия на небесной сфере, ось ОиZи направлена по оси
вращения Земли, а ось ОиYи составляет с осями ОиXи и ОиZи правый
трехгранник.
Положение инерциальной СК относительно звезд неизменно.
Гринвичская геоцентрическая СК ОиXYZ: ось ОиX лежит в
плоскости земного экватора и направлена в точку пересечения
гринвичского меридиана с экватором, ось ОиZ направленна по оси
вращения Земли, а ось ОиY составляет с осями ОиX и ОиZ правый
трехгранник.
Сопровождающий трехгранник OENH геодезической СК: ось
OH направлена вверх по местной вертикали, ось OE направлена по
на север касательной к географической параллели, ось ON
направлена на восток по касательной к географическому меридиану
в точке местонахождения ОК.
6. Для определения углов ориентации системы координат oxyz, связанной с инерциальным измерительным модулем (ИИМ), относительно
инерциальной СК OXиYиZи, а также для координатныхпреобразований может быть использована универсальная матрица
направляющих косинусов (МНК) B ,
0
b11
B 0 b21
b31
b12
b22
b32
b13
b23
b33
X
x
И
y B Y
0
И
z
Z И
которая получается путем трех поворотов на углы
,
,
.
7.
Полагается, что начальные направления осей трехгранниковОиXиYиZи и oxyz совпадают, а все повороты выполняются против
часовой стрелки следующим образом: первый – на угол
вокруг третьей оси ОZи; второй – на угол вокруг нового
положения первой оси ОХ и ; третий – на угол
вокруг
нового положения второй оси ОYи .
Ниже показаны преобразования при последовательных поворотах,
связывающих трехгранники oxyz и оXиYиZи с помощью матрицы
направляющих косинусов B .
0
8.
XИ
Y
И
Z И
cosγ
- sinγ
0
sinγ 0 X И
cos γ 0 Y И
0 1 Z
И
Вψ
X
И
YИ
Z И
1
0
0
0
0 X И
cos sin Y И
sin cos Z И
В
X
И
YИ
Z И
cos γ
0
sin γ
0 sin γ X И
1 0 Y И
0 cos γ Z
Вγ
И
9.
B0 B В B ψ (*)γ
После перемножения (*) элементы матрицы
вид
B0
будут иметь
10.
b11 cos cos sin sin sinb12 sin cos cos sin sin
b13 cos sin
b21 cos sin
b22 cos cos
b23 sin
b31 cos sin sin sin cos
b32 sin sin cos sin cos
b33 cos cos
11.
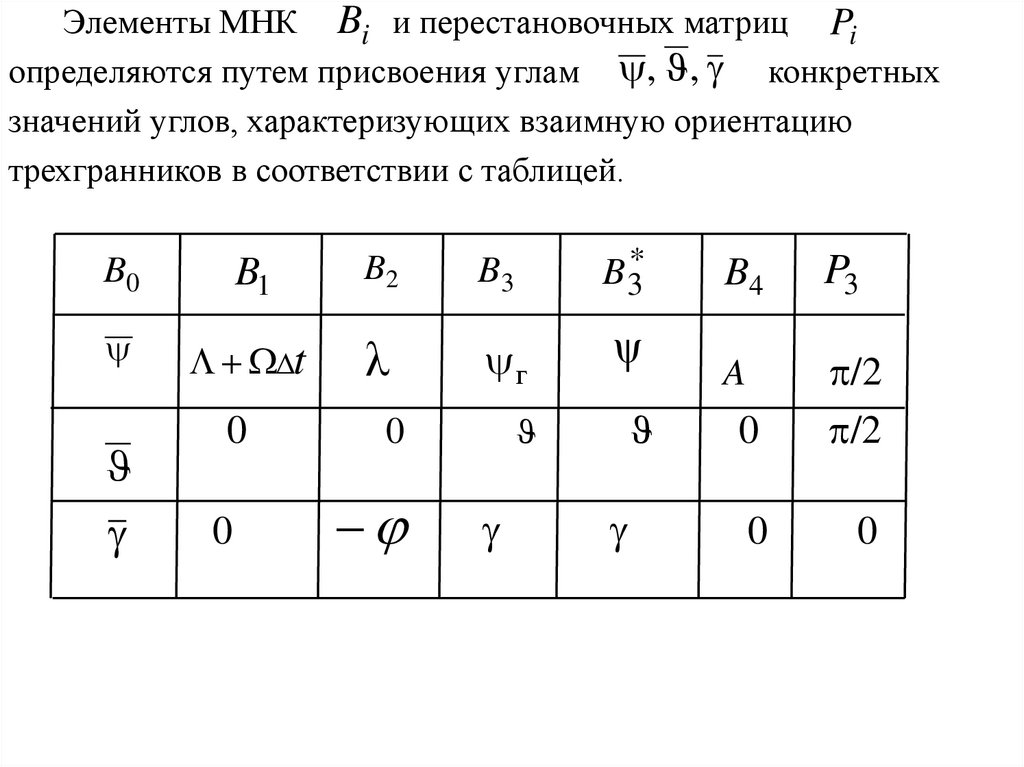
Элементы МНК Bi и перестановочных матриц Piопределяются путем присвоения углам , , конкретных
значений углов, характеризующих взаимную ориентацию
трехгранников в соответствии с таблицей.
B0
B1
B2
B3
B 3*
t
λ
г
ψ
0
0
0
B4
P3
A
0
/2
/2
0
0