 physics
physicsSimilar presentations:

")






. Каноническое разложение случайных процессов")

Моделирование систем и процессов. Лекция 8
1.
Моделирование систем ипроцессов
Тема 6. Моделирование авиационных систем
Лекция 8
Статистическая динамика автоматических систем. Определение
статистических характеристик выходного сигнала методом весовых
функций. Преобразование линейной стационарной системой
стационарных случайных входных сигналов. Определение дисперсии
выходного стационарного сигнала САУ методом формирующего фильтра.
Синтез систем автоматического управления, работающих при воздействии
случайных сигналов.
2.
Знать:• задачи исследования и оптимизации авиационных систем и
процессов эксплуатации авиационной техники, которые решаются
с помощью математического моделирования;
• методы моделирования сложных технических систем с учетом
особенностей структуры и функциональных задач;
• методику разработки моделей систем и процессов для решения
задач, возникающих при эксплуатации, а также научных и
инженерных исследованиях авиационных систем.
3.
Повторить самостоятельно:Задачи анализа линейных САУ, решаемые на основе частотных
характеристик: определение устойчивости, оценка статической точности
статических и астатических систем. Оценка динамической точности,
построение переходного процесса и определение качества систем.
Задачи синтеза линейных систем частотными методами: построение
желаемой амплитудно-частотной характеристики системы, выбор и
определение корректирующего звена.
Модели линейных дискретных динамических систем. Определение
дискретной модели сигнала: виды модуляций, преобразование спектра
непрерывного сигнала при его прохождении через дискретную систему.
Передаточные функции дискретных моделей: Z- преобразование; Zпередаточные функции составляющих звеньев дискретных систем.
Передаточные функции разомкнутой и замкнутой системы. Определение
выходного сигнала. Временные характеристики дискретных систем.
Переходная функция. Устойчивость моделей дискретных систем. Частотные
характеристики дискретных систем. Синтез дискретных систем.
Дискретные корректирующие устройства.
4.
Общие положения о математическом моделированиястатических систем
Режим функционирования технической системы определяется
характером внешних возмущающих и управляющих воздействий.
Различают статические и динамические режимы.
Динамическим называется режим, в котором состояние
системы неустановившееся. Он обусловлен изменением во
времени внешних воздействий, вызывающих возникновение
переходных процессов системы, при которых изменяются ее
фазовые координаты.
При постоянных воздействиях система находится в
установившемся равновесном состоянии. Ее фазовые
координаты при этом постоянны. Такой режим
функционирования системы называется статическим.
Для статического режима характерна неизменность реакций взаимодействия всех
элементов технической системы и реакций внешней среды. В электрической системе
сохраняется постоянство токов и напряжений во всех элементах электрической цепи
5.
Постановка задач анализа статических состоянийСуществует несколько подходов к постановке и решению задач анализа
статических состояний технических систем. Они различаются используемыми
математическими моделями и методами решения систем уравнений.
1. Математическая модель статического состояния
технического объекта представляет собой систему линейных
или нелинейных алгебраических уравнений вида
где V — вектор фазовых координат технической системы.
2. Статическое состояние системы определено на основе
исходной математической модели технической системы, т.е.
системы обыкновенных дифференциальных уравнений
Численное решение этих уравнений при неизменных внешних воздействиях
через конечный отрезок времени tK приводит к стационарной точке V* , в
которой dV/dt = 0 . Координаты этой точки и будут соответствовать
искомому решению.
6.
3. Представить задачу анализа как экстремальную. Для этогонеобходимо сформировать целевую функцию, имеющую
минимум в точке решения задачи V*. В качестве целевой
функции может
быть принята, например, скалярная
функция Ф(V ) , равная сумме квадратов невязок Fi (V )
системы уравнений
*
F (V ), F (V ) — скалярное
где n — порядок системы уравнений;
произведение векторов F (V ) , F (V )
Невязка Fi (V ) возникает, если в i-e уравнение системы
подставить произвольный вектор фазовых координат V,
отличающийся от вектора V* . В этом случае уравнения не
удовлетворяются и возникает вектор невязок.
Определение фазовых координат стационарной точки производится с
применением методов поиска минимума целевой функции. При этом
находится приближенное решение оптимизационной задачи.
7.
Стохастические линейные модели систем.Случайные входные сигналы не могут быть представлены в
виде линейной комбинации детермированных типовых
сигналов, а следовательно, реакцию ЛСС на случайные
входные воздействия нельзя рассматривать как совокупность
ее реакций на комбинацию неслучайных типовых сигналов.
Поэтому АС, подверженные воздействию случайных сигналов,
требуют специальных математических методов для исследования их
реакций на данные сигналы и оценки показателей качества
переходных процессов.
Системы, находящиеся под воздействием случайных
входных сигналов, называются стохастическими, а
раздел автоматики, посвященный изучению методов их
исследования, называется статистической динамикой.
Теоретическая основа - теория случайных функций,
основополагающую роль в которой сыграли труды отечественных
ученых А.Н.Колмогорова, А.Я.Хинчина, В.С.Пугачева и зарубежных
Н. Виннера, К. Шеннона и других
8.
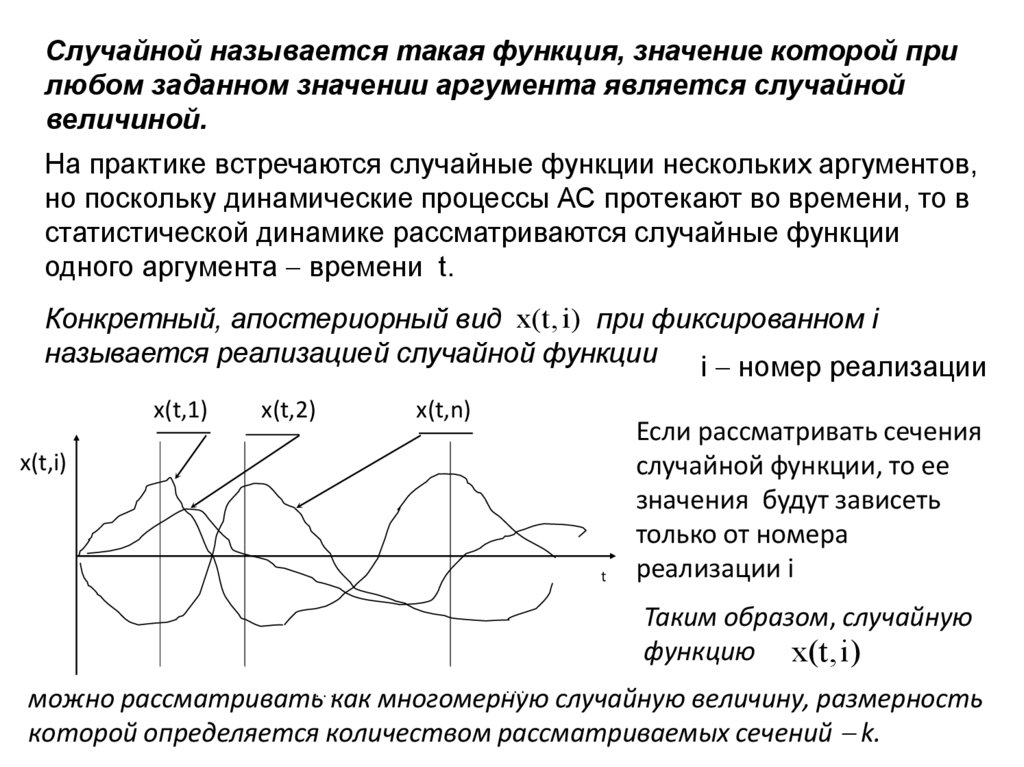
Случайной называется такая функция, значение которой прилюбом заданном значении аргумента является случайной
величиной.
На практике встречаются случайные функции нескольких аргументов,
но поскольку динамические процессы АС протекают во времени, то в
статистической динамике рассматриваются случайные функции
одного аргумента времени t.
Конкретный, апостериорный вид x(t , i ) при фиксированном i
называется реализацией случайной функции
i номер реализации
x(t,1)
x(t,2)
x(t,n)
x(t,i)
t
Если рассматривать сечения
случайной функции, то ее
значения будут зависеть
только от номера
реализации i
Таким образом, случайную
функцию x(t , i )
...
можно рассматривать. . .как многомерную случайную величину, размерность
которой определяется количеством рассматриваемых сечений k.
9.
Способы задания случайных функций:1. Случайная функция, как некий аналог многомерной случайной
величины, может быть задана многомерным распределением
вероятностей:
Fk ( x1 , x 2 , ,x k ; t 1 , t 2 , ,t k ) P x j ( t k , i) x
j 1, k
x j принимает все возможные значения изменения случайной
функции
x( t , i )
F1 ( x, t k ) P x( t k , i) x
k 2.
одномерная функция распределения
вероятностей
F2 ( x 1 , x 2 ; t 1 , t 2 ) двумерная функция
распределения вероятностей
В инженерной практике функции распределения вероятностей
размерностей k 2, как правило, неизвестны, поэтому
ограничиваются заданием двумерной функции распределения
вероятностей.
2. Случайную функцию можно задать k-мерной плотностью
вероятностей:
f (x , x , , x ; t , t , , t )
k
1
2
k
1
2
k
10.
Случайные функции количественно характеризуются неслучайнымистатистическими характеристиками
1. Математическое ожидание:
m x ( t ) M x( t ) x( t ) f 1 ( x ,t )dx
Математическим ожиданием или средним (по множеству)
значением случайной функции x( t ) называется такая неслучайная
функция m x ( t ) которая при любом значении аргумента t t k
равна среднему значению соответствующего сечения случайной
функции.
11.
2. Корреляционная или автокорреляционная функция:o
o
K x ( t 1 , t 2 ) M x( t 1 ) x( t 2 )
x( t 1 ) m x ( t 1 ) x( t 2 ) m x ( t 2 ) f 2 ( x 1 , x 2 , t 1 , t 2 )dx 1 dx 2 .
o
x( t ) x( t ) m x ( t )
центрированная случайная функция, для которой
справедливо равенство
o
M x( t ) M x( t ) m x ( t ) m x ( t ) m x ( t ) 0
Корреляционной функцией (моментом) случайной функции x( t )
называется такая неслучайная характеристика K x ( t 1 , t 2 )
которая при любой произвольно выбранной паре аргументов t 1 и
t 2 равна математическому ожиданию произведения двух сечений
этой центрированной функции.
12.
Корреляционная функция характеризует связь между двумявыбранными сечениями t 1 и t 2 случайной функции, то есть
вероятность совпадений этих сечений, либо скорость изменения
реализаций случайной функции во времени.
Чем больше величина K x ( t 1 , t 2 ) тем меньше скорость изменения
реализаций случайной функции и, следовательно, тем больше
вероятность совпадения двух сечений реализаций, и наоборот.
3. Дисперсия случайной функции:
o2
D x ( t ) K x ( t , t ) M x ( t )
Дисперсией случайной функции x( t ) называется корреляционная
функция, отнесенная к одному и тому же сечению и равная
среднему значению квадрата случайной функции.
13.
4. Среднее квадратичное отклонениеx (t) D x (t)
Перечисленные неслучайные статистические характеристики
количественно характеризуют случайную функцию во временной
области
В частотной области случайная функция характеризуется
спектральной плотностью S x ( )
Взаимной корреляционной характеристикой двух случайных
функций x( t ) и y( t ) называется математическое ожидание
произведения их центрированных значений в сечениях t 1 и t 2
o
o
K xy ( t 1 , t 2 ) M x( t 1 ) y( t 2 )
x( t 1 ) m x ( t ) y( t 2 ) m y ( t ) f xy ( x 1 , t 1 ; y 1 , t 2 )dxdy.
K xy ( t 1 , t 2 ) 0
условие статистической независимости
(некоррелированности) функций
14.
Корреляционные характеристики стационарногослучайного сигнала
Случайный сигнал (функция) называется стационарным (ССС),
если его математическое ожидание и дисперсия постоянны,
а корреляционная функция зависит только от разности ее
аргументов:
m x ( t ) m x const ,
D x ( t ) K x ( t , t ) K x (0) D x const ,
K x ( t 1 , t 2 ) K x ( ), t 2 t 1 .
Свойства корреляционной функции стационарного сигнала
1. Корреляционная функция ССС является четной функцией
K x ( t 1 , t 2 ) K x ( t 2 , t 1 ) K x ( ) K x ( )
2. Значение корреляционной функции ССС не превосходит
величины дисперсии этого сигнала:
K x ( ) D x
15.
3. Коэффициент корреляции или нормированнаякорреляционная функция двух сечений x( t ) и x( t )
стационарного случайного сигнала не больше единицы:
x ( ) 1
x ( ) K x ( ) / K x (0)
4. Корреляционная функция ССС является функцией
убывающей причем K x ( ) 0
Чем больше
тем слабее статистическая связь между выбранными
сечениями ССС.
Чем быстрее убывает корреляционная функция, тем слабее эта связь.
Для ССС справедливо так называемое
правило "трех сигм":
o
центрированное значение x( t ) сечения ССС x( t ) не
превышает величины 3 x с вероятностью P=0,997, то есть
o
P x( t ) 3 x 0,997
16.
Свойство эквивалентности среднего по времени среднему помножеству - свойство носит название эргодичности ССС
Практически это означает, что для эргодичного
стационарного процесса все усредненные характеристики
( m x ( t ), D x ( t ) и т.д.) одинаковы для всех реализаций и эти
реализации могут быть заменены одной реализацией
достаточно продолжительной по времени.
Принятие эргодической гипотезы позволяет ограничиться
обработкой лишь одной реализации стационарной случайной
функции по соответствующим формулам.
17.
Спектральная плотность стационарного случайного сигналафункция, которая характеризует ССС в частотной области S x ( )
Характеристика позволяет осуществить анализ преобразования
линейной стационарной АС эргодических ССС частотными
методами.
Стационарный случайный сигнал в спектральном
представлении является совокупностью гармонических
функций различной частоты со случайными коэффициентами:
x( t ) Vk e j k t m x
Vk
k
k
- случайные коэффициенты
- частота гармоник, представляющих стационарный
случайный сигнал.
спектральное представление ССС
x( t ) V( )e j t d m x
18.
Спектральная плотность ССС на участке соседних частот k k 1S x ( k ) =
D xk
D xk
k
- дисперсия гармоники с частотой k
k k 1 k
- диапазон между двумя соседними значениями
выбранных частот
Спектральная плотность характеризует распределение
мощности ССС по гармоникам различной частоты.
Спектральной плотностью мощности (или просто
спектральной плотностью) стационарного случайного
сигнала x( t ) называется прямое преобразование Фурье
корреляционной функции K x ( )
S x ( ) K x ( )e j d
19.
e j cos j sinПо формуле Эйлера
S x ( ) K x ( ) cos d j K x ( ) sin d
cos
Учитывая, что
функция четная, а
0
sin
нечетная
Sx ( ) K x ( ) cos d 2 K x ( ) cos d
с учетом четности корреляционной функции
K x ( ) K x ( )
спектральная плотность ССС функция действительная и четная
S x ( ) = S x ( )
кроме того
S x ( ) 0
Корреляционная функция ССС определяется как обратное преобразование
Фурье от спектральной плотности:
1
j
K x ( )
S
(
)
e
d
x
2
1
K x ( )
S
(
)
cos
d
j
S
(
)sin
d
x
x
2
1
S x ( ) cos d .
0
20.
Полагая0
K x ( )
1
S ( ) cos d .
x
0
1
2
D x x K x ( ) S x ( ) d
0
1
S x ( )d
Элемент дисперсии
Элемент дисперсии трактуют как составляющую мощности
o
сигнала x( t ) в диапазоне частот k k 1
Вспоминаем
S x ( k ) =
D xk
k
Спектральную плотность часто называют спектральной
плотностью мощности ССС
21.
«Белый шум»Идеальным типовым стационарным случайным сигналом
является «белый шум»
ССС x( t ) называется «белым шумом», если он
центрирован, а его корреляционная функция
пропорциональна дельта-функции ( )
m x const 0 ,
D x const ,
K x ( ) S x ( ) ,
S x - интенсивность (спектральная плотность) «белого шума»
«белый шум» это случайный процесс, в котором отсутствует
какая-либо связь между предыдущими и последующими
значениями сечений случайной функции
мощность всех
гармоник
Вычислим интенсивность «белого шума»:
спектрального
S x ( ) = K x ( ) e j d S x ( ) cos d S x const
представления
одинакова
22.
Дисперсия "белого шума"D x K x ( t t ) K x (0) S x (0) =
«белый шум» в спектральном разложении представляется
гармониками с бесконечно большими амплитудами, частоты
которых принимают значения всего числового диапазона оси
частот 0,
так как мощность сигнала пропорциональна квадрату его
амплитуды, то очевидно, что «белый шум» должен обладать
бесконечно большой мощностью, чего в природе до
настоящего времени не наблюдалось
Однако !!!
Практически все ССС в полосе пропускания АС или близки по
своим свойствам к «белому шуму», или могут быть выражены
через него.
23.
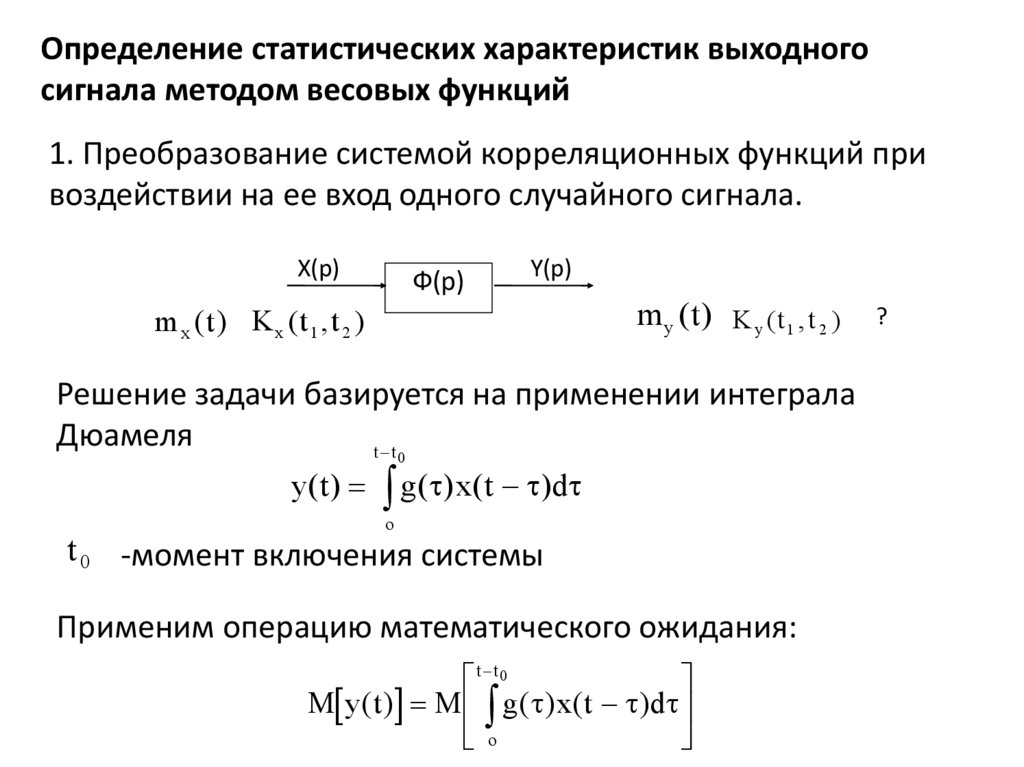
Определение статистических характеристик выходногосигнала методом весовых функций
1. Преобразование системой корреляционных функций при
воздействии на ее вход одного случайного сигнала.
X(p)
Ф(p)
Y(p)
mx (t) K x (t1 , t 2 )
m y (t) K y (t 1 , t 2 )
Решение задачи базируется на применении интеграла
Дюамеля
t t0
y( t ) g( ) x( t )d
o
t 0 -момент включения системы
Применим операцию математического ожидания:
t t0
M y( t ) M g( ) x( t )d
o
?
24.
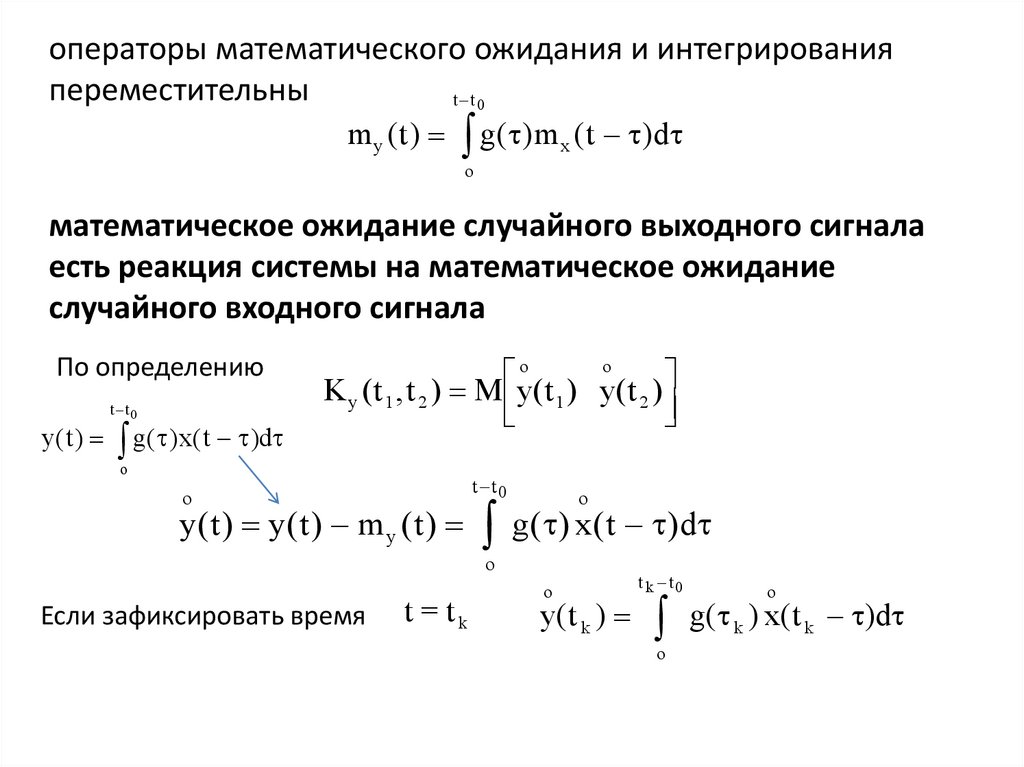
операторы математического ожидания и интегрированияпереместительны
t t0
m y ( t ) g( ) m x ( t )d
o
математическое ожидание случайного выходного сигнала
есть реакция системы на математическое ожидание
случайного входного сигнала
По определению
t t0
y( t ) g( ) x( t )d
o
o
K y ( t 1 , t 2 ) M y( t 1 ) y( t 2 )
o
t t0
o
o
y( t ) y( t ) m y ( t ) g( ) x( t )d
o
Если зафиксировать время
t = tk
o
y( t k )
t k t0
o
g( ) x( t )d
k
o
k
25.
t2 t0o
o
t1 t 0
K y ( t 1 , t 2 ) M g( 1 ) x( t 1 1 )d 1 g( 2 ) x( t 2 2 )d 2
o
o
o
o
t1 t 0 t 2 t 0
M g( 1 )g( 2 ) x( t 1 1 ) x( t 2 2 )d 1d 2 .
o o
t1 t0 t2 t0
K y ( t 1 ,t 2 )
o
g( 1 )g( 2 )K x ( t1 1 ,t 2 2 )d 1 d 2 =
o
t2 t0
= g( 1 ) g( 2 )K x ( t1 1 ,t 2 2 )d 2 d 1 .
o
o
t1 t0
Применение этих формул требует достаточно трудоемких вычислений.
Интерес представляют частные случаи входных сигналов, когда определение
корреляционной функции выходного случайного сигнала основывается на
однократном интегрировании (по одной переменной), либо вообще без
применения процедуры интегрирования. Одним из таких частных случаев является
класс случайных сигналов, действующих на вход ЛСС, представимых в так
называемой канонической форме.
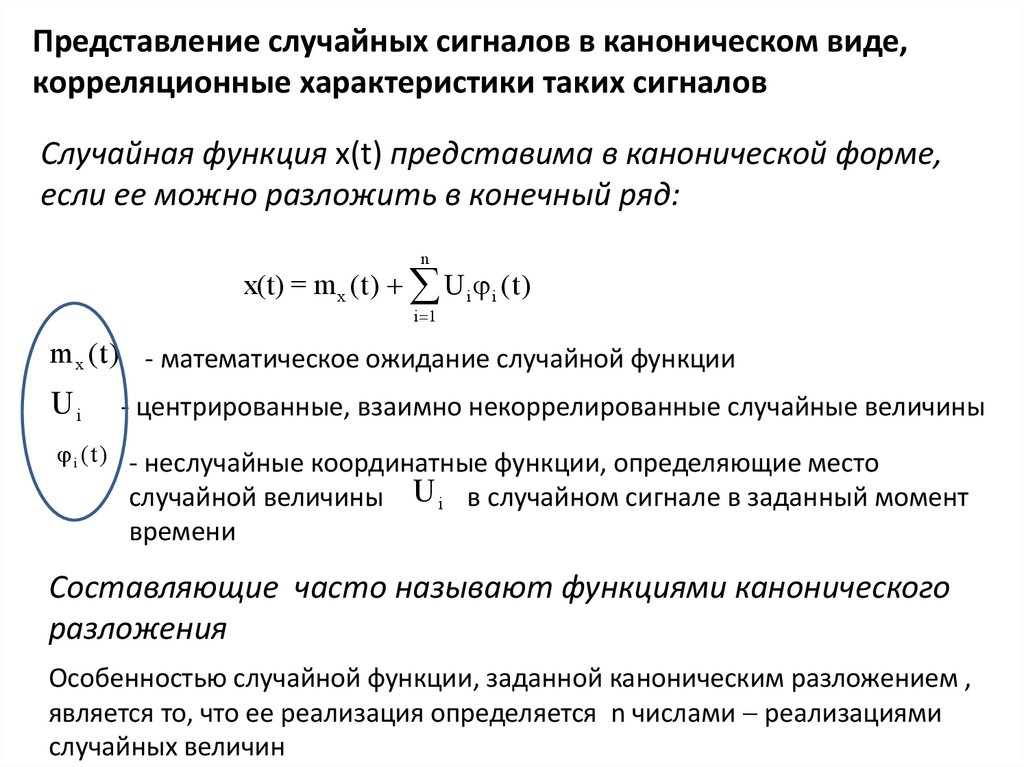
26.
Представление случайных сигналов в каноническом виде,корреляционные характеристики таких сигналов
Случайная функция x(t) представима в канонической форме,
если ее можно разложить в конечный ряд:
n
x(t) = m x ( t ) U i i ( t )
i 1
m x ( t ) - математическое ожидание случайной функции
Ui
- центрированные, взаимно некоррелированные случайные величины
i ( t ) - неслучайные координатные функции, определяющие место
случайной величины
времени
U i в случайном сигнале в заданный момент
Составляющие часто называют функциями канонического
разложения
Особенностью случайной функции, заданной каноническим разложением ,
является то, что ее реализация определяется n числами реализациями
случайных величин
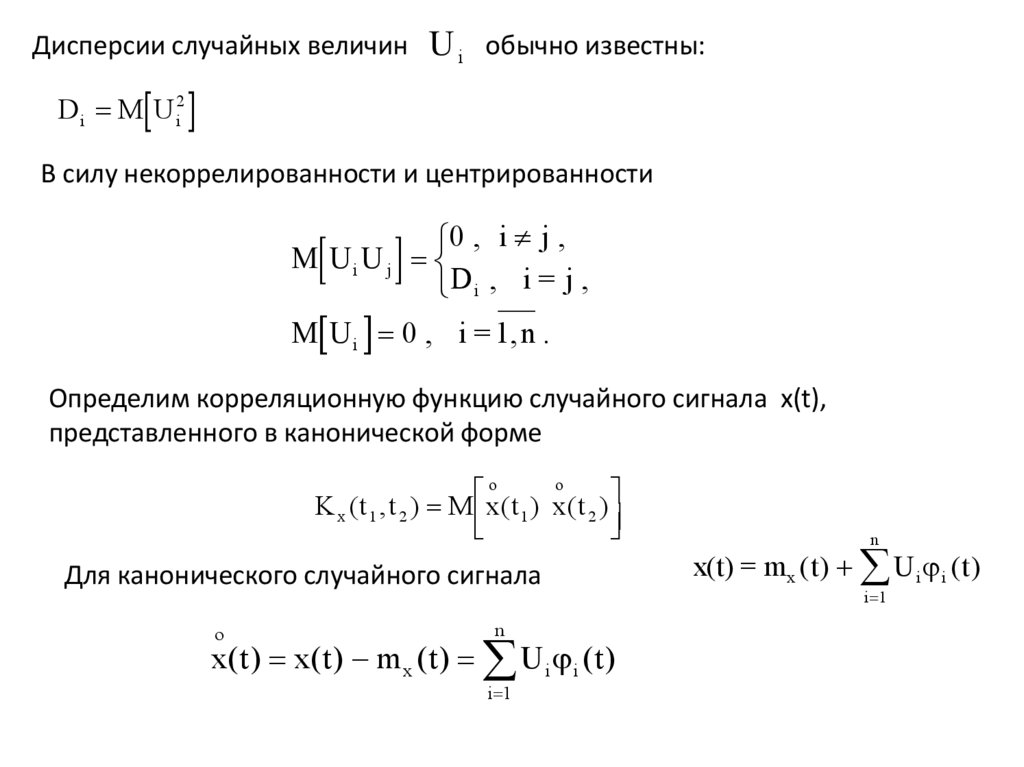
27.
Дисперсии случайных величинU i обычно известны:
D i M U 2i
В силу некоррелированности и центрированности
0 , i j ,
M Ui U j
D i , i = j ,
M U i 0 , i = 1,n .
Определим корреляционную функцию случайного сигнала x(t),
представленного в канонической форме
o
o
K x ( t 1 , t 2 ) M x( t 1 ) x( t 2 )
Для канонического случайного сигнала
o
n
x( t ) x( t ) m x ( t ) U i i ( t )
i 1
n
x(t) = m x ( t ) U i i ( t )
i 1
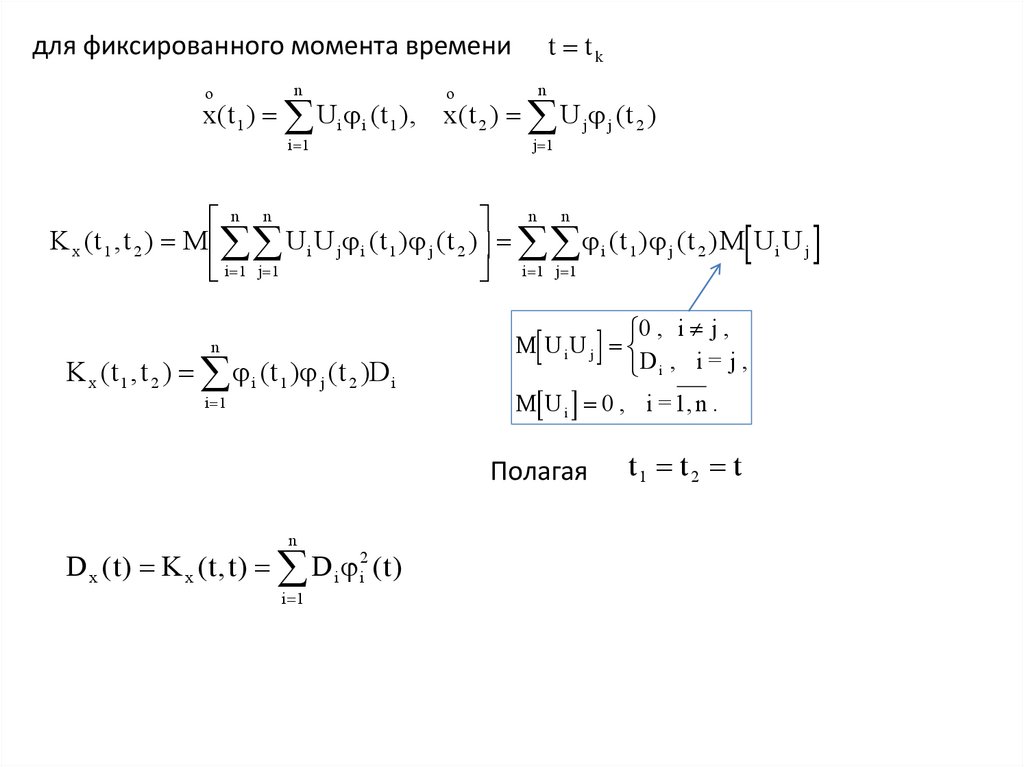
28.
t tkдля фиксированного момента времени
o
n
o
n
x( t 1 ) U i i ( t 1 ), x( t 2 ) U j j ( t 2 )
i 1
j 1
n n
n n
K x ( t 1 , t 2 ) M U i U j i ( t 1 ) j ( t 2 ) i ( t 1 ) j ( t 2 ) M U i U j
i 1 j 1
i 1 j 1
n
K x ( t 1 , t 2 ) i ( t 1 ) j ( t 2 )D i
i 1
0 , i j ,
M Ui U j
D i , i = j ,
M U i 0 , i = 1,n .
Полагая
n
D x ( t ) K x ( t , t ) D i 2i ( t )
i 1
t1 t 2 t
29.
Определим статистические характеристики выходного случайногосигнала
На основании интеграла Дюамеля
t t0
t t0
n
y( t ) g( ) x( t )d g( ) m x ( t ) U i i ( t ) d
i 1
0
0
или
t t0
n
t t0
0
i 1
0
y( t ) g( ) m x ( t )d U i g( ) i ( t )d
n
y( t ) m y ( t ) U i i ( t ),
i 1
t t0
m y ( t ) g ( ) m x ( t ) d
0
t t0
i ( t ) g( ) i ( t )d ,
0
i = 1,n .
30.
1. Реакция ЛСС на канонический случайный сигнал есть такжеканонический случайный сигнал
2. Математическое ожидание выходного канонического
случайного сигнала является реакцией ЛСС на математическое
ожидание входного канонического случайного сигнала.
3. В состав выходного канонического случайного сигнала
входит та же совокупность случайных величин Ui , i = 1,n что и
во входной канонический случайный сигнал.
4. Каждая координатная функция выходного канонического
случайного сигнала i ( t ), i = 1,n определяется как реакция ЛСС
на соответствующую координатную функцию i ( t ), i = 1,n
входного канонического сигнала
31.
Таким образом, корреляционные характеристики выходногоканонического случайного сигнала можно вычислить по тем же
формулам, что и для входного канонического случайного
сигнала:
n
K y ( t 1 , t 2 ) D i i ( t 1 ) i ( t 2 ),
i 1
n
D y ( t ) K y ( t , t ) D i i2 ( t ).
i 1
32.
Преобразование линейной стационарной системойстационарных случайных входных сигналов
Условия стационарности выходного случайного сигнала
Рассмотрим ЛСС, на вход которой действует стационарный случайный
сигнал
mx ( t ) mx const ,
K x ( t 1 , t 2 ) K x ( t 2 t 1 ) K x ( ) .
Используя метод весовых функций, определим статические характеристики
случайного выходного сигнала системы
t
t
0
0
m y ( t ) g ( ) m x ( t ) d m x g ( ) d
m y ( t ) m x h( t )
t
g ( ) d h ( t )
0
33.
Ky (t1 , t 2 )t 2 t 0 t1 t 0
g( )g( ) K ( t , t )d d
1
0
2
x
1
1
2
2
1
2
0
Принимая момент включения системы
входного ССС, получим
t0 0
и учитывая свойства
t 2 t1
K y ( t 1 , t 2 ) g( 1 )g( 2 ) K x t 2 2 ( t 1 1 ) d 1d 2
0 0
или
t 2 t1
K y ( t 1 , t 2 ) g( 1 )g( 2 ) K x ( 2 1 )d 1d 2
0 0
корреляционная функция выходного случайного сигнала зависит не только
от разности аргументов
но и от самих аргументов
t 2 t1
в общем случае при воздействии
стационарного случайного сигнала на
линейную стационарную систему
условия стационарности
не выполняются
m (t ) m const ,
D (t ) K (t , t ) K (0) D const ,
K (t , t ) K ( ), t t .
1 2
2
1
34.
В частном случае, если ЛСС устойчива, то при неограниченномувеличении времени работы системы, то есть t t 1 t 2
либо t 0 (система работает бесконечно давно)
справедливы равенства, характеризующие выходной
случайный сигнал ЛСС как стационарный.
Hа практике выходной сигнал ЛСС при воздействии на её вход
ССС можно считать стационарным, если время работы
системы больше её времени регулирования.
Таким образом, условия стационарности выходного случайного
сигнала ЛСС можно сформулировать следующим образом :
1. Входной случайный сигнал ЛСС должен быть
стационарным.
2. ЛСС должна быть устойчива.
3. Время работы системы должно быть больше её времени
регулирования.
35.
Определение спектральной плотности и дисперсиивыходного случайного сигнала ЛСС
S y ( ) K y ( )e j d
прямое преобразование Фурье от
корреляционной функции
K y (t1 , t2 ) g ( 1 ) g ( 2) K x ( 2 1 )d 1d 2
0 0
S y ( ) g( 1 ) g( 2 ) K x ( 1 2 ) e
0
j
d 1d 2 d
0
e j e j ( 1 2 ) e j 1 e j 2
S y ( ) g( 1 )g( 2 ) K x ( 1 2 )e j ( 1 2 ) e j 1 e j 2 d 1d 2 d
0
0
0
g( 1 )e j 1 g( 2 )e j 2 K x ( 1 2 )e j ( 1 2 ) d 1d 2 d .
0
36.
рассмотрим интегральные сомножители:1 const ,
j ( 1 2 )
j t
K
(
)
e
d
const
,
K
(
t
)
e
dt S x ( )
1
2
2
x
x
t .
1
2
внутренний интеграл представляет собой АФЧХ системы
0
0
Ф( p) L g( t ) g( t )e pt dt , то Ф( j ) g( t )e j t dt ,
j 2
g
(
)
e
d 2 Ф( j )
2
0
по аналогии
j 1
g
(
)
e
d 1 Ф( j )
1
0
S y ( ) S x ( )Ф( j )Ф( j )
37.
произведение функции комплексной переменной на комплексносопряженную ей функцию равно квадрату модуля множимой функции:2
Ф( j )Ф( j ) Ф( j ) Ф2a ( )
S y ( ) S x ( )Ф( j )Ф( j )
АЧХ системы
2
S y ( ) Ф ( j ) S x ( )
или
Sy ( ) Ф2a ( )Sx ( )
Спектральная плотность стационарного случайного
сигнала на выходе ЛСС в установившемся режиме равна
произведению квадрата её АЧХ на спектральную
плотность входного ССС
38.
Зная спектральную плотность выходного ССС, можно вычислить1
1
j
K y ( ) S y ( )e d S x ( )Ф 2a ( )e j d
0
0
1
1
D y K y (0) S y ( )d S x ( )Ф 2a ( )d
0
0
Hа практике часто приходится рассчитывать системы, находящиеся под
воздействием нескольких случайных входных сигналов.
Y( p) Ф X ( p) X( p) Ф Z ( p) Z( p)
2
S y ( ) S x ( ) Ф x ( j ) S z ( ) Ф z ( j )
2
39.
Вычисление дисперсии реакции ЛСС на «белый шум»Пусть входной сигнал ЛСС x(t) является «белым шумом» с корреляционной
функцией
K x ( ) S x ( )
S x const
интенсивность (спектральная плотность) «белого шума»
t 2 t1
K y ( t 1 , t 2 ) g( 1 )g( 2 ) K x ( 2 1 )d 1d 2
0 0
K y ( ) g( 1 )g( 2 )S x ( 1 2 )d 1d 2
0 0
Найдем дисперсию реакции системы на «белый шум»
0
D y K y (0) g( 1 )g( 2 )S x ( 1 2 )d 1d 2
0 0
S x g( 1 )g( 2 ) ( 1 2 )d 1d 2 .
0 0
40.
Учитывая фильтрующее свойство дельта-функцииg( ) ( )d g( )
1
1
2
1
2
0
1 2
тогда
D y S x g 2 ( )d
или
D y SxI
0
I g 2 ( )d -величина интегральной квадратичной оценки качества
0
системы, находящейся под воздействием «белого шума»
Если известно изображение по Лапласу весовой функции системы
L g( ) G ( p) Ф( p)
B( p)
,
A ( p)
то ИКО вычисляется по известной
формуле Красовского
I=
B
2a n
B
D y = Sx
2a n
41.
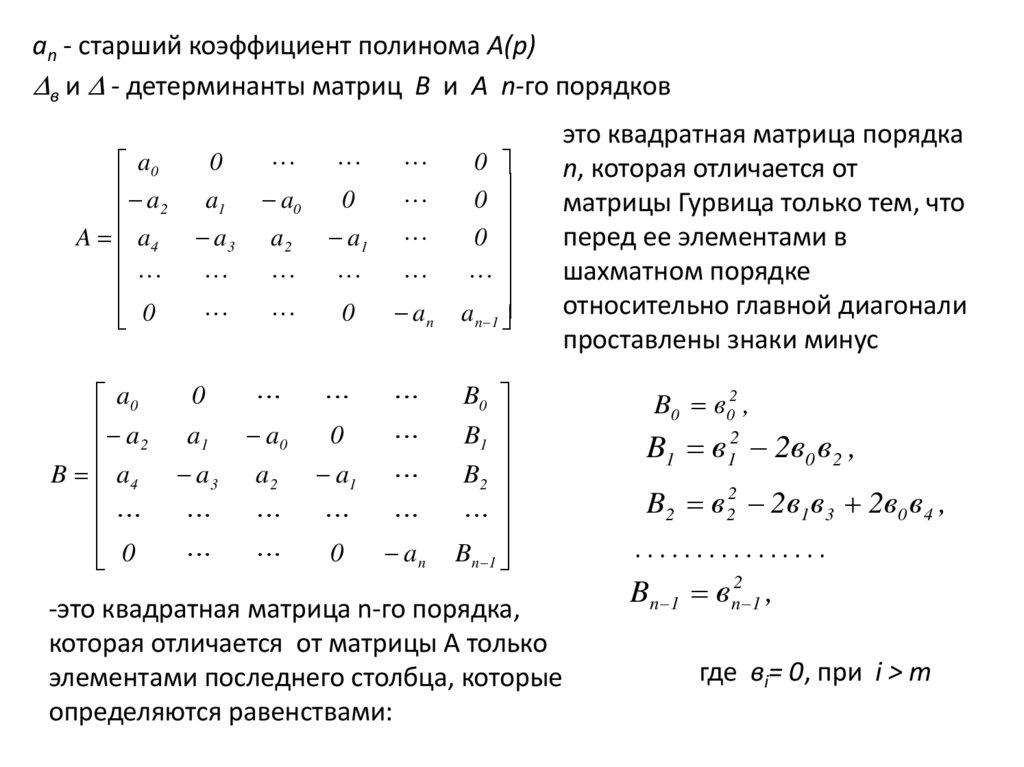
an - старший коэффициент полинома A(p)в и - детерминанты матриц B и A n-го порядков
a0
a
2
A a4
0
a0
a
2
B a4
0
0
a1
a3
a0
a2
0
a1
0
an
0
0
0
a n 1
0
a1
a3
a0
a2
0
a1
0
an
B0
B1
B2
Bn 1
это квадратная матрица порядка
n, которая отличается от
матрицы Гурвица только тем, что
перед ее элементами в
шахматном порядке
относительно главной диагонали
проставлены знаки минус
-это квадратная матрица n-го порядка,
которая отличается от матрицы A только
элементами последнего столбца, которые
определяются равенствами:
B0 в02 ,
B1 в12 2в0 в 2 ,
B2 в 22 2в1 в 3 2в0 в 4 ,
................
Bn 1 в n2 1 ,
где вi= 0, при i > m
42.
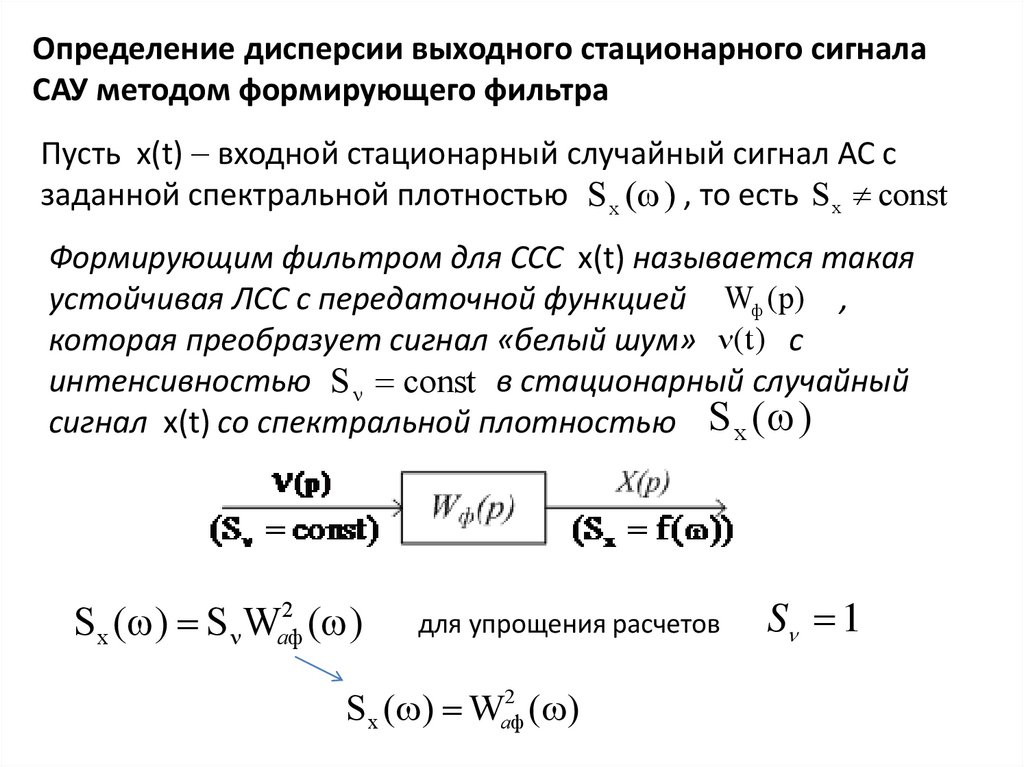
Определение дисперсии выходного стационарного сигналаСАУ методом формирующего фильтра
Пусть x(t) входной стационарный случайный сигнал АС с
заданной спектральной плотностью S x ( ) , то есть S x const
Формирующим фильтром для ССС x(t) называется такая
устойчивая ЛСС с передаточной функцией Wф ( p) ,
которая преобразует сигнал «белый шум» ( t ) с
интенсивностью S const в стационарный случайный
сигнал x(t) со спектральной плотностью S x ( )
Sx ( ) S Wa2ф ( )
для упрощения расчетов
Sx ( ) Wa2ф ( )
S 1
43.
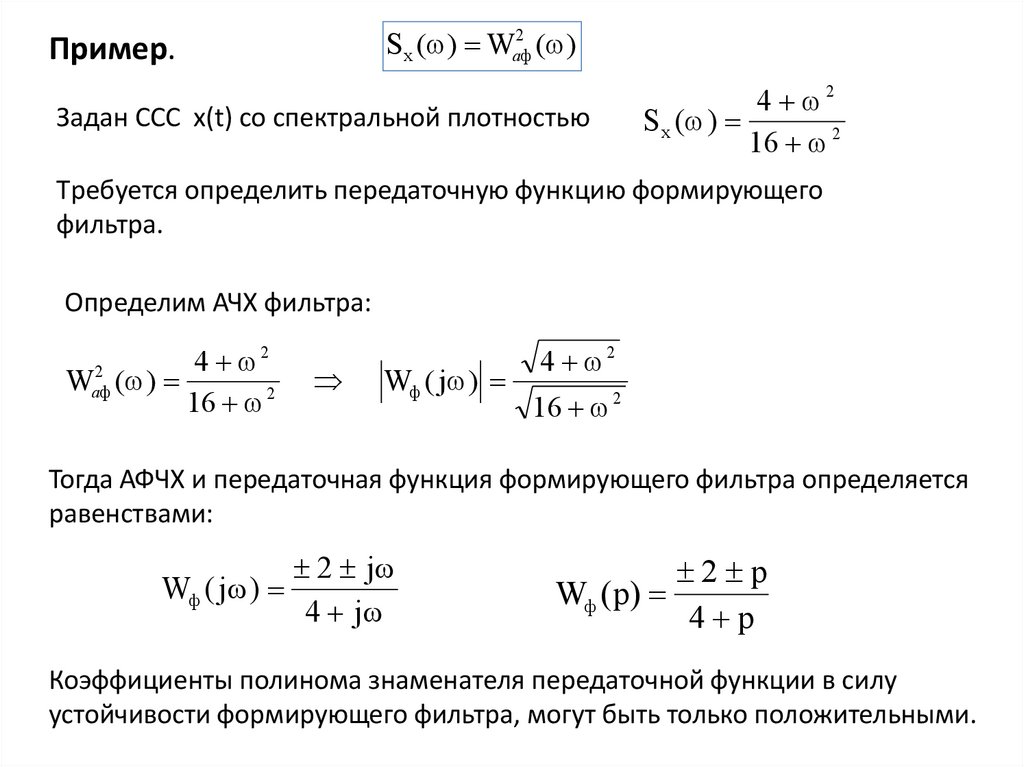
Sx ( ) Wa2ф ( )Пpимеp.
Задан ССС x(t) со спектральной плотностью
4 2
S x ( )
16 2
Тpебуется определить передаточную функцию формирующего
фильтра.
Определим АЧХ фильтра:
2
4
Wa2ф ( )
16 2
Wф ( j )
4 2
16 2
Тогда АФЧХ и передаточная функция формирующего фильтра определяется
равенствами:
2 j
Wф ( j )
4 j
2 p
Wф ( p)
4 p
Коэффициенты полинома знаменателя передаточной функции в силу
устойчивости формирующего фильтра, могут быть только положительными.
44.
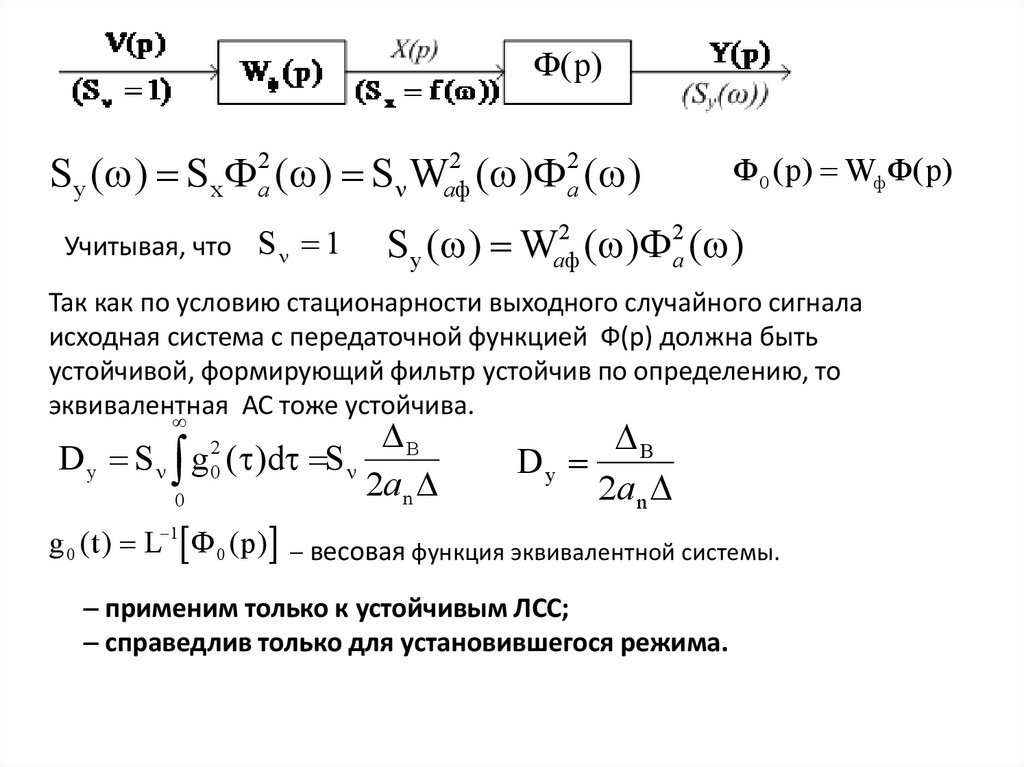
Ф( p)Sy ( ) Sx Ф2a ( ) S Wa2ф ( )Ф2a ( )
Учитывая, что S 1
Ф0 ( p) Wф Ф( p)
Sy ( ) Wa2ф ( )Ф2a ( )
Так как по условию стационарности выходного случайного сигнала
исходная система с передаточной функцией Ф(p) должна быть
устойчивой, формирующий фильтр устойчив по определению, то
эквивалентная АС тоже устойчива.
B
D y S g ( )d S
2a n
0
2
0
B
Dy
2a n
g 0 ( t ) L 1 Ф 0 ( p) весовая функция эквивалентной системы.
применим только к устойчивым ЛСС;
справедлив только для установившегося режима.