
































 mathematics
mathematicsSimilar presentations:




")





СУИМ. Лекция 2. Обобщенная функциональная схема СУИМ. Математическое описание функциональных элементов СУИМ
1.
СУИМЛекция 2
Обобщенная функциональная схема
СУИМ
Математическое описание
функциональных элементов СУИМ
2.
Обобщенная функциональнаясхема
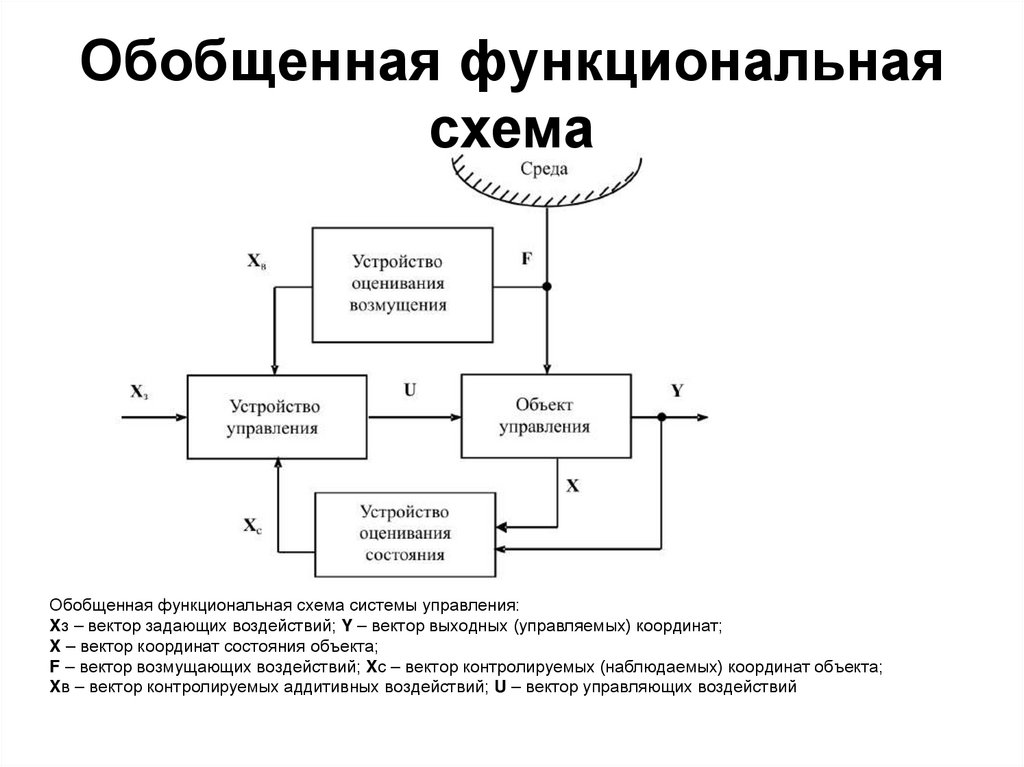
Обобщенная функциональная схема системы управления:
Xз – вектор задающих воздействий; Y – вектор выходных (управляемых) координат;
X – вектор координат состояния объекта;
F – вектор возмущающих воздействий; Xс – вектор контролируемых (наблюдаемых) координат объекта;
Xв – вектор контролируемых аддитивных воздействий; U – вектор управляющих воздействий
3.
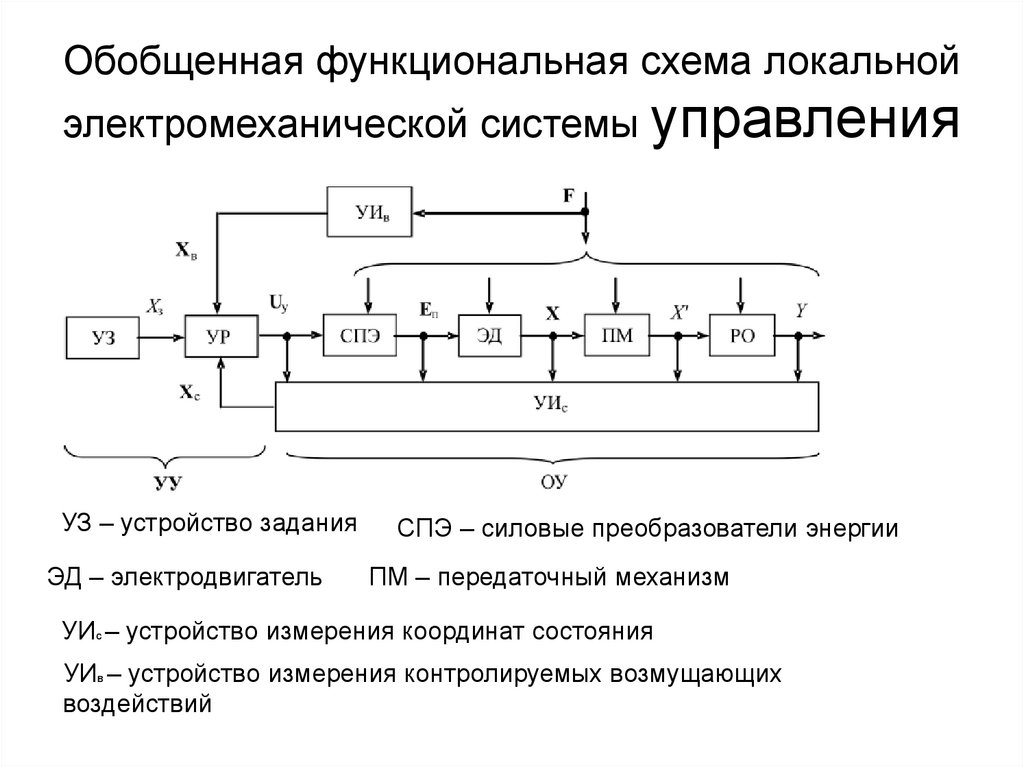
Обобщенная функциональная схема локальнойэлектромеханической системы управления
УЗ – устройство задания
ЭД – электродвигатель
СПЭ – силовые преобразователи энергии
ПМ – передаточный механизм
УИс – устройство измерения координат состояния
УИв – устройство измерения контролируемых возмущающих
воздействий
4.
Статические и динамическиережимы и характеристики
• Статические режимы СУИМ характеризуются
установившимися состояниями при неизменных входных
воздействиях.Уравнения статики легко получить из
уравнений динамики СУИМ, приравняв в них к нулю все
производные переменных.
• статическая характеристика системы (элемента) – это
зависимость выходной переменной системы (элемента) от
какой-либо
входной переменной в установившемся режиме
• Динамические режимы СУИМ характеризуются переходными
состояниями системы при изменении начального состояния,
а также входных (задающих и(или) возмущающих) воздействий.
При этом различают свободные и вынужденные процессы
5.
6.
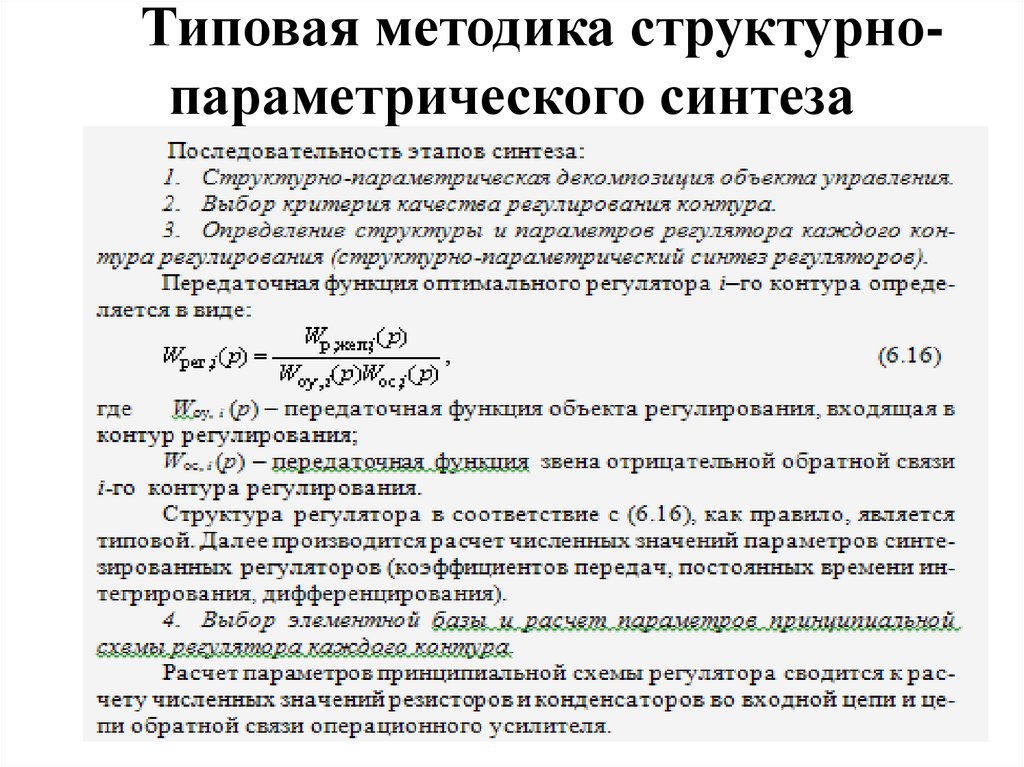
Синтез и анализ СУИМ• К основным задачам синтеза СУИМ (функциям НИР) относят
следующие:
• – определение адекватной объекту управления (ОУ)
математической модели (ММ);
• – формулирование цели управления, т.е. критериев качества
• управления;
• – синтез структуры СУИМ (задача структурного синтеза), т.е.
• установление оптимальных (рациональных) элементов
устройства управления и взаимосвязей между ними;
• – синтез параметров СУИМ (задача параметрического синтеза),
т.е. определение оптимальных (рациональных) параметров
устройства управления
7.
Математическое описание ОУ• – определение структуры и параметров
ОУ, наиболее существенно влияющих на его
статические и динамические
характеристики.
• вводят разумные допущения, позволяющие упростить
математическую модель (ММ) объекта управления для цели синтеза
и, напротив, детализировать ее для цели анализа СУИМ.
• осуществляют в частотной или временной области
• На предварительном этапе синтеза выбирают элементы объекта
управления основываясь на основных параметрах и характеристиках
их функционирования (временных диаграммах, средних или
предельных значениях мощности, моменте, скорости, ускорении и
т.п.)
8.
Формулирование критериякачества управления
• целевая функция, цель управления, функционал
качества, оценка качества управления.
• К числу формальных критериев качества, относят:
• – быстродействие регулирования;
• – точность регулирования;
• – интегральные критерии, в том числе
интегральные квадратичные;
• – минимаксные, экономические, энергетические и
т.д
9.
Синтез СУИМ• Нахождение ее структуры и параметров,
обеспечивающих заданное качество
управления при известных входных
воздействиях
10.
Анализ синтезированной СУИМ• Результат анализа должен дать ответ на
вопрос, соответствует ли синтезированная
СУИМ требуемому качеству (критериям
качества)
11.
• Задача анализа СУИМ предполагает в общем случае решениенескольких подзадач:
• – определение ММ СУИМ, отражающей ее доминирующие
свойства с учетом допущений, принятых на этапе синтеза СУИМ;
• – оценка устойчивости СУИМ;
• – оценка показателей качества при заданных аддитивных воздействиях на нее;
• – оценка чувствительности СУИМ к вариациям ее параметров;
• – оценка экономической, эксплуатационной эффективности
СУИМ, показателей надежности и др.
12.
при анализе СУИМ используется• – математическое моделирование (цифровое,
аналоговое, цифроаналоговое);
• – полунатурное моделирование (симбиоз
математической модели и физической
установки);
• – натурное моделирование (с применением
моделей-макетов на основе применения
критериев подобия модели и объекта,
критериальных уравнений);
• – экспериментальные исследования СУИМ.
13.
МАТЕМАТИЧЕСКОЕ ОПИСАНИЕФУНКЦИОНАЛЬНЫХ ЭЛЕМЕНТОВ
СУИМ
14.
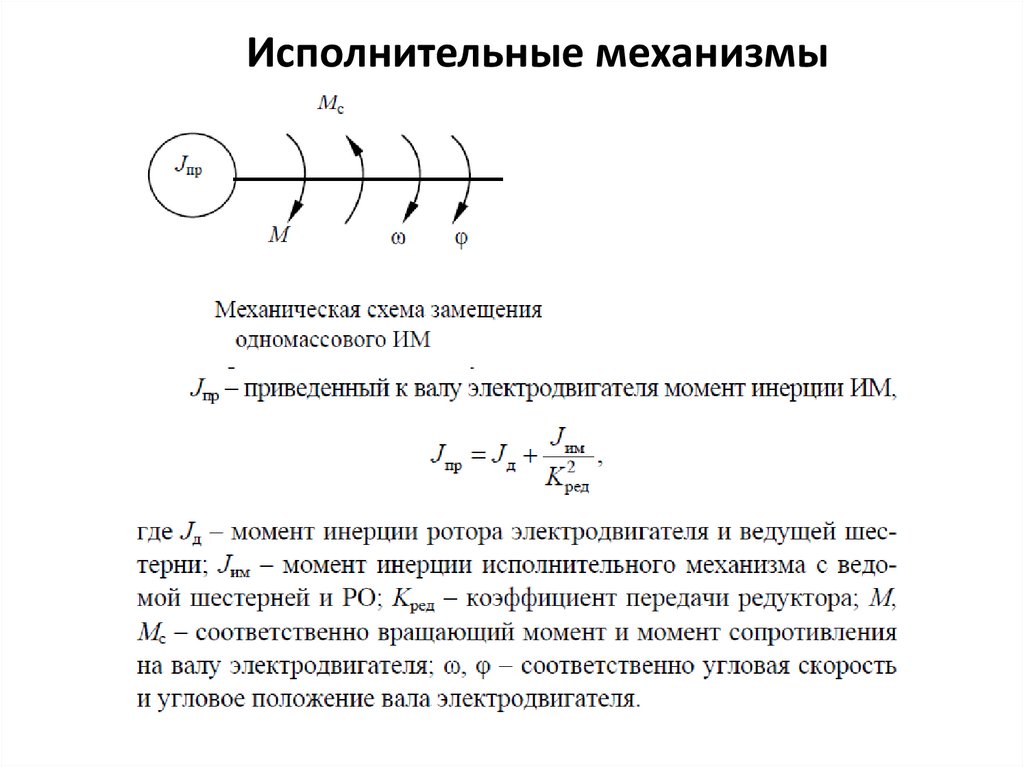
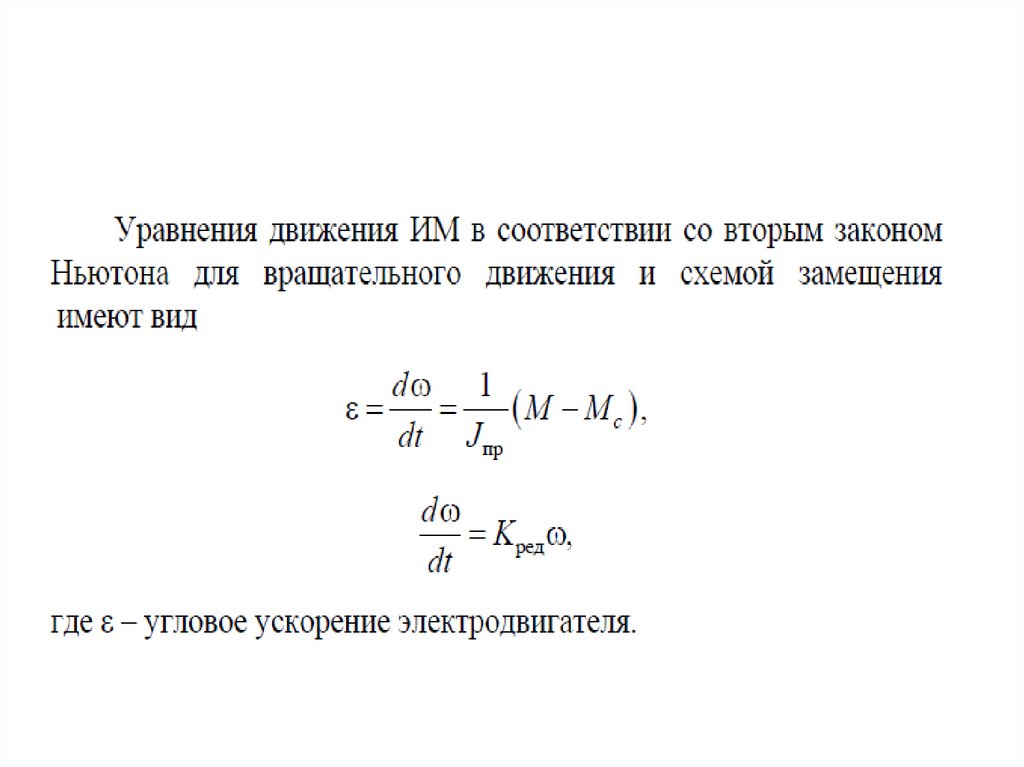
Исполнительные механизмы15.
16.
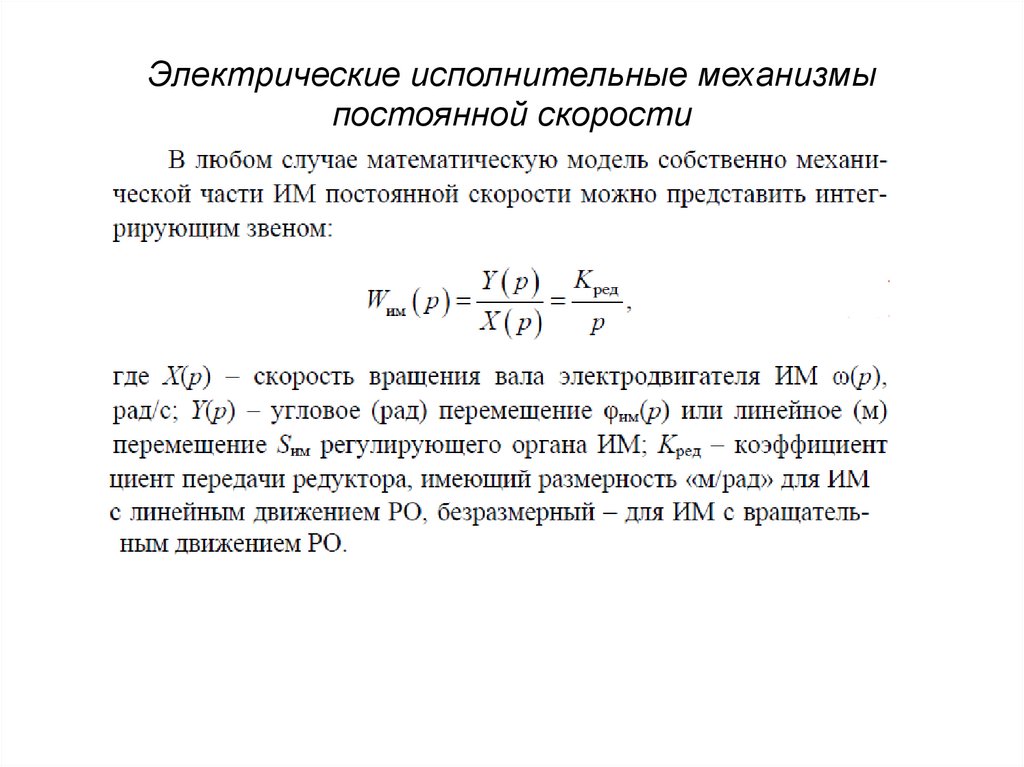
Электрические исполнительные механизмыпостоянной скорости
17.
18.
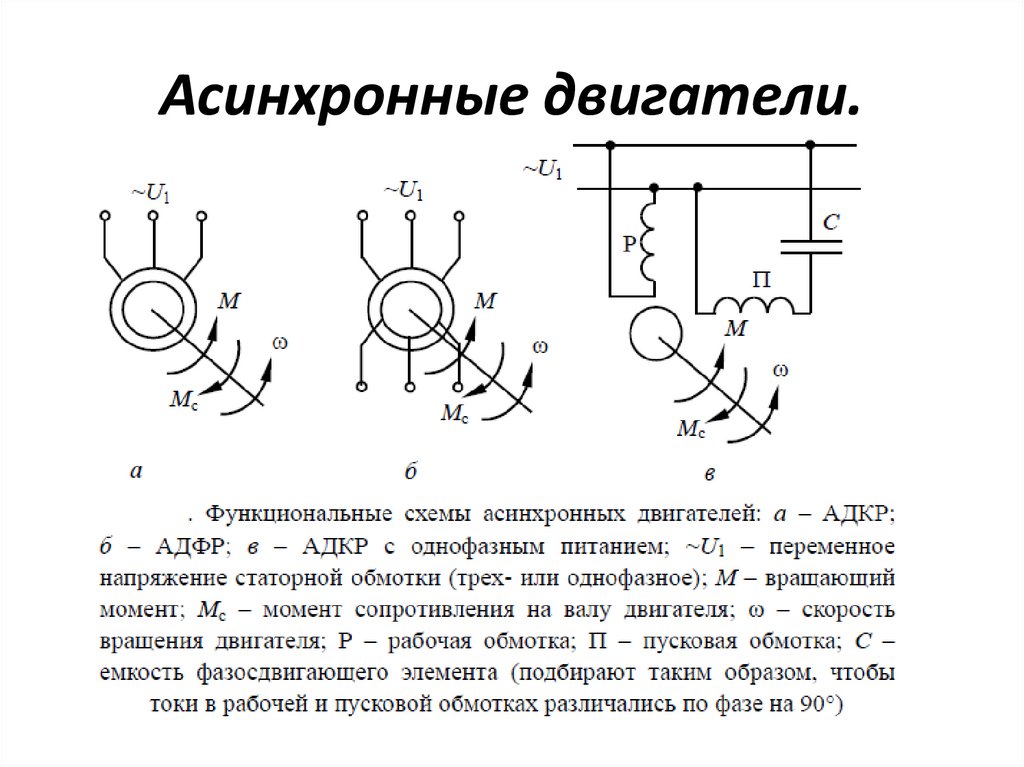
Приводы• К приводам ЭИМ относятся следующие
типы двигателей:
• – коллекторные двигатели постоянного тока
(ДПТ);
• – бесколлекторные двигатели постоянного
тока (БДПТ);
• – асинхронные трехфазные и однофазные
(АД);
• – синхронные трехфазные и однофазные (СД);
• – шаговые (ШД).
19.
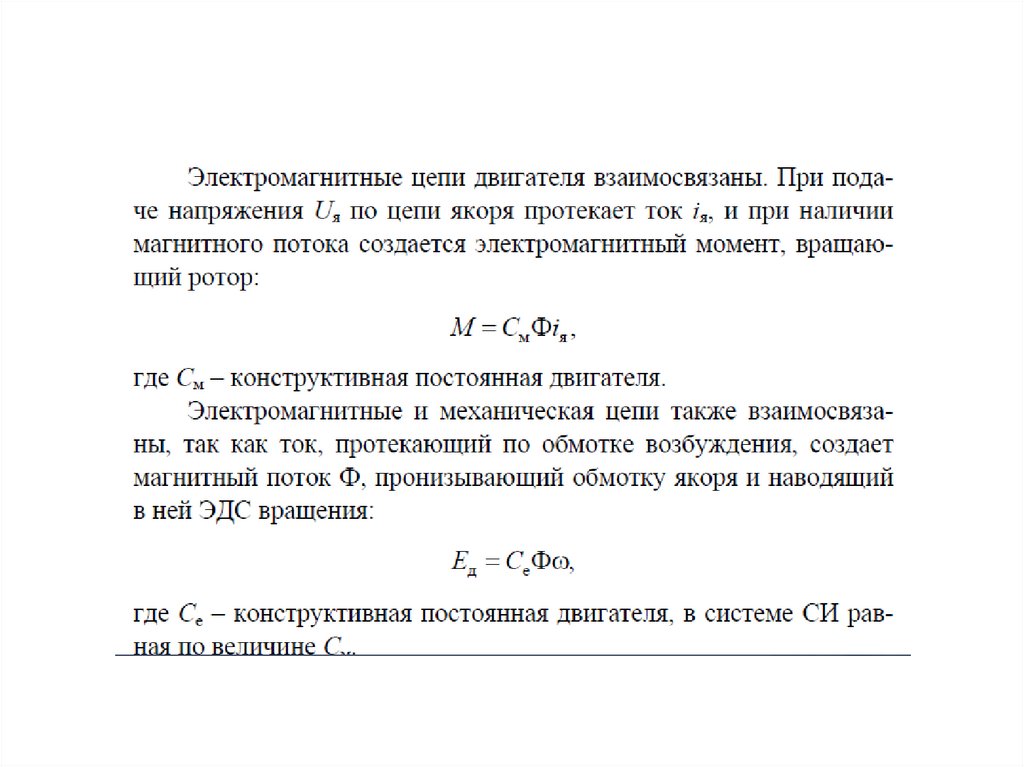
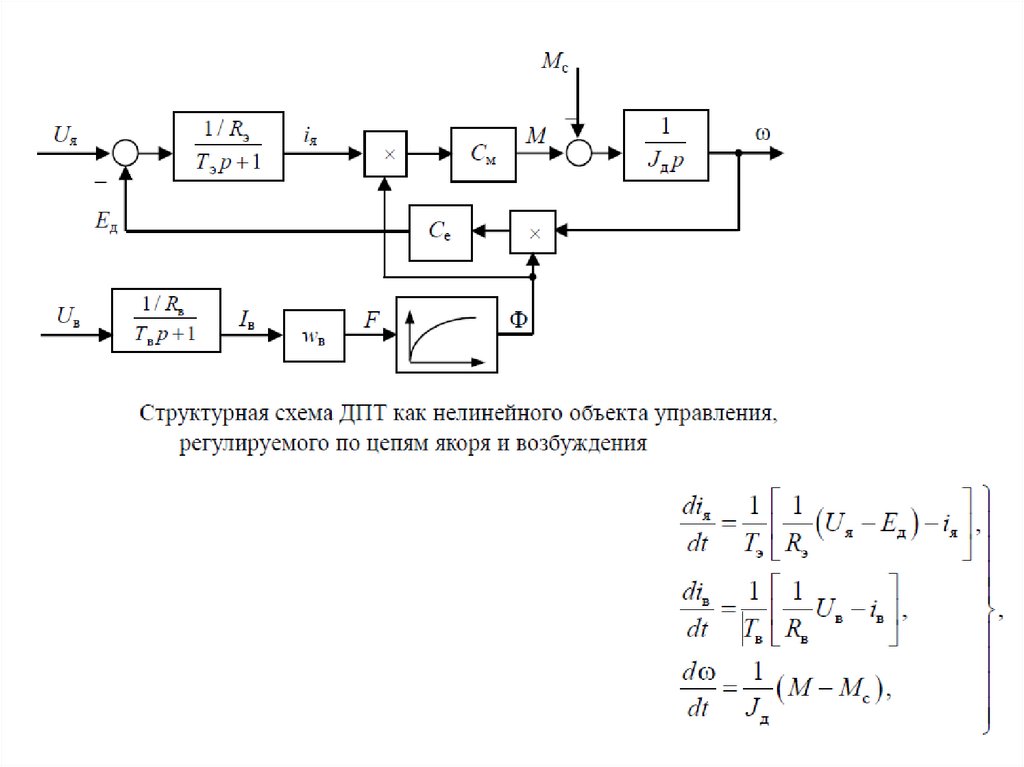
Функциональная схема (а) и схемы замещения (б, в, г)электродвигателя постоянного тока
Являются
приводами ЭИМ
с переменной
скоростью.
цепь якоря
электромеханическая цепь
цепь возбуждения
Тэ, Тв – электромагнитные постоянные
времени соответственно
обмотки якоря и обмотки возбуждения
20.
21.
22.
где ΔЕд , ΔМ – приращениякоординат ЭДС двигателя и
электромагнитного момента
ΔФ – приращение магнитного
потока
Kф – коэффициент линеаризации кривой
насыщения магнитной цепи,
23.
24.
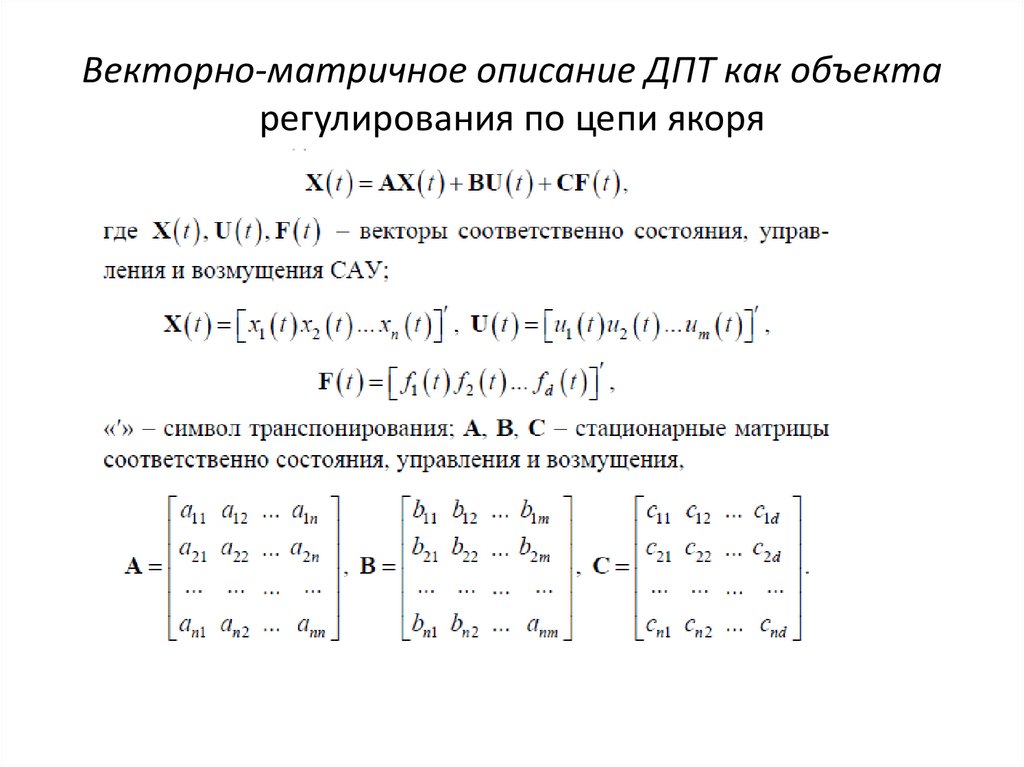
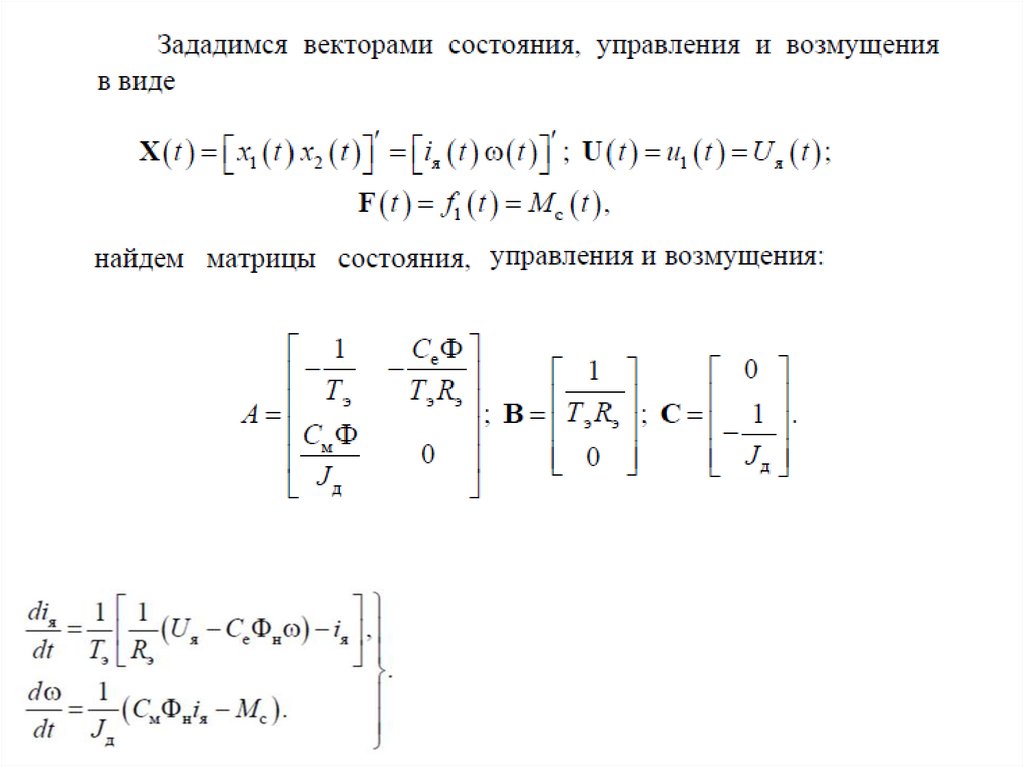
Векторно-матричное описание ДПТ как объектарегулирования по цепи якоря
25.
26.
Асинхронные двигатели.27.
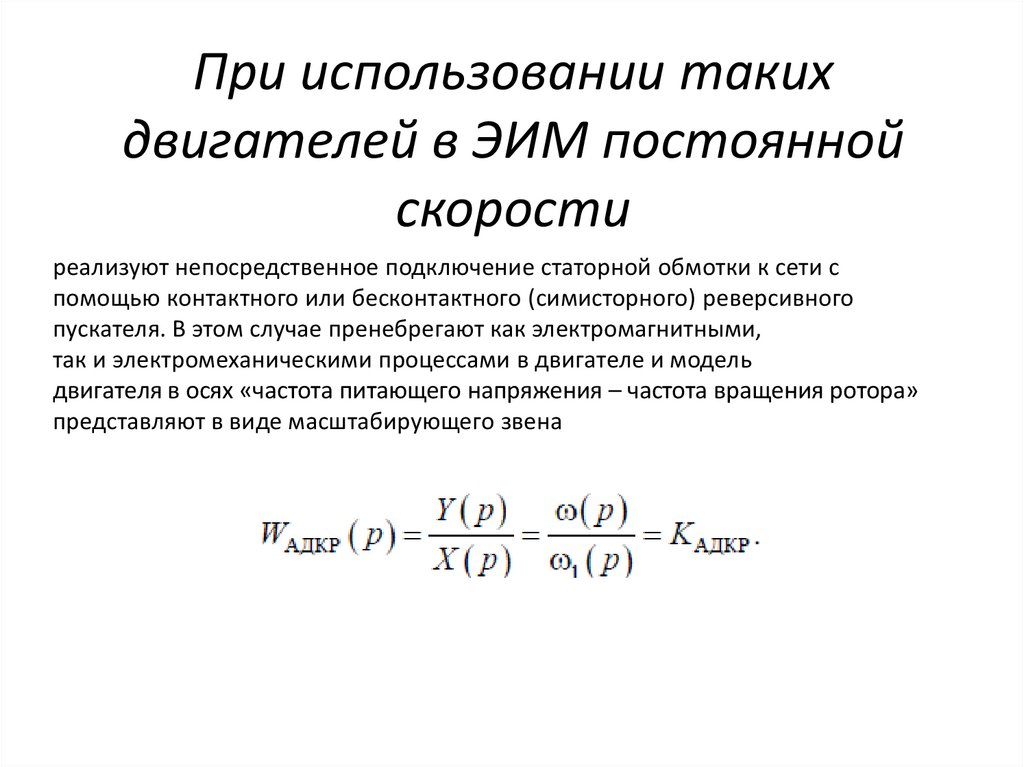
При использовании такихдвигателей в ЭИМ постоянной
скорости
реализуют непосредственное подключение статорной обмотки к сети с
помощью контактного или бесконтактного (симисторного) реверсивного
пускателя. В этом случае пренебрегают как электромагнитными,
так и электромеханическими процессами в двигателе и модель
двигателя в осях «частота питающего напряжения – частота вращения ротора»
представляют в виде масштабирующего звена
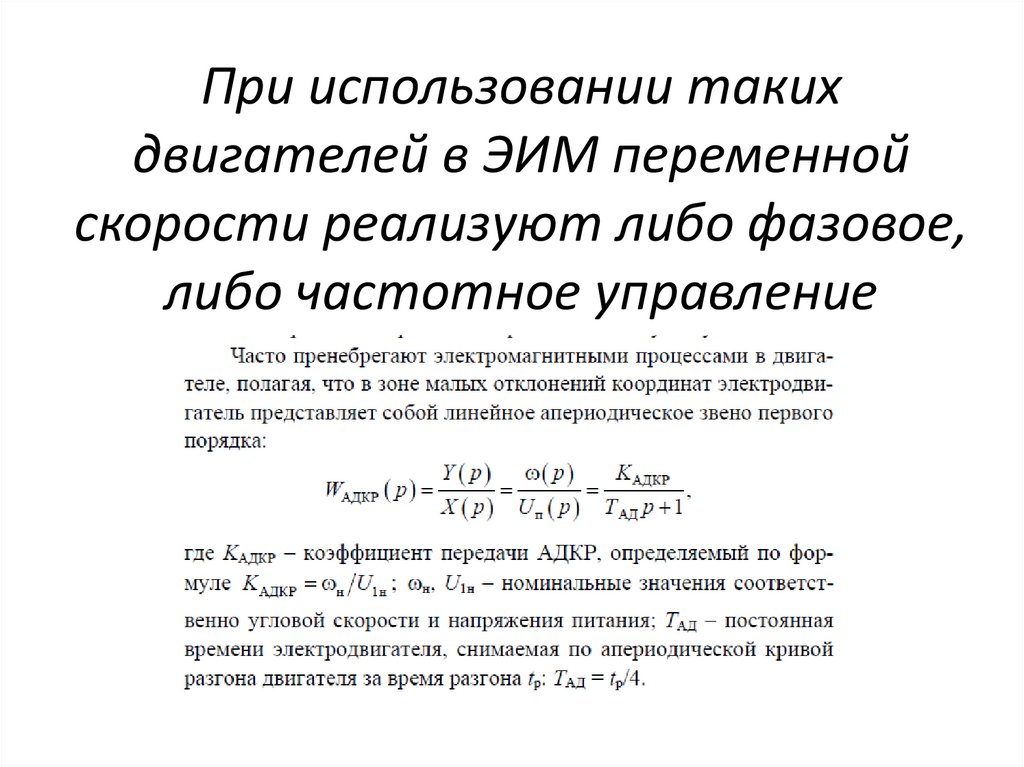
28.
При использовании такихдвигателей в ЭИМ переменной
скорости реализуют либо фазовое,
либо частотное управление
29.
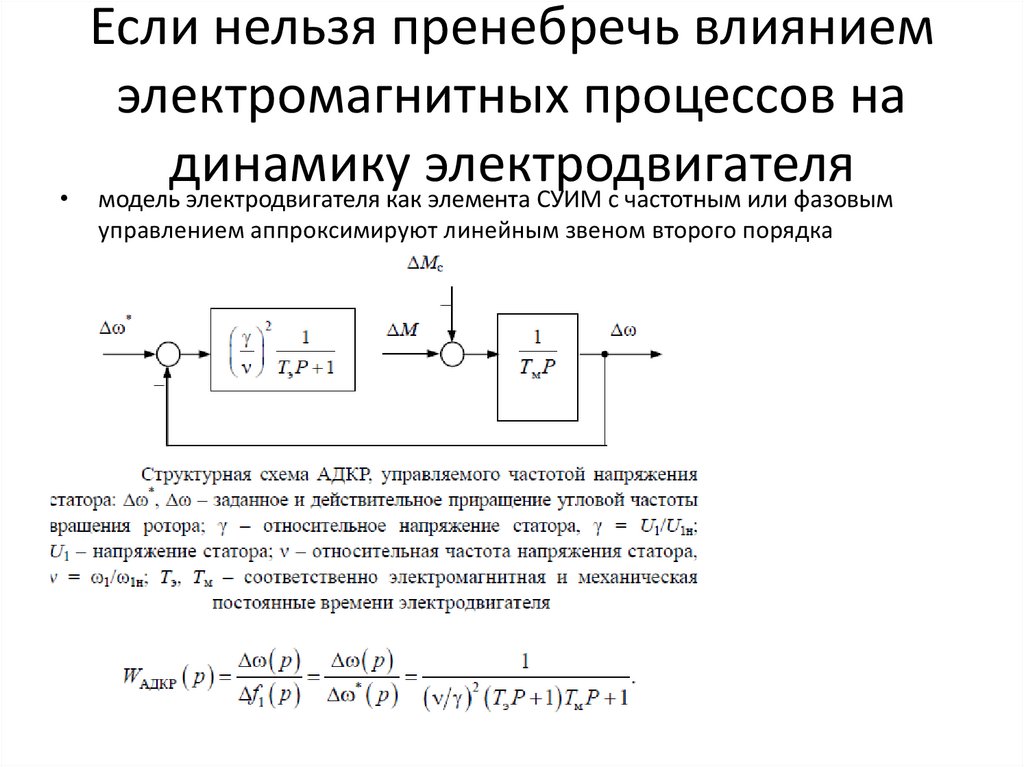
Если нельзя пренебречь влиянием
электромагнитных процессов на
динамику
электродвигателя
модель электродвигателя как элемента СУИМ с частотным или фазовым
управлением аппроксимируют линейным звеном второго порядка
30.
Синхронные двигатели.Различают следующие виды:
• – синхронные двигатели с
электромагнитным возбуждением (СД),
питающиеся от трехфазной сети
переменного тока;
• – синхронные двигатели с постоянными
магнитами (СДПМ), питающиеся от трехили однофазной сети переменного тока.
31.
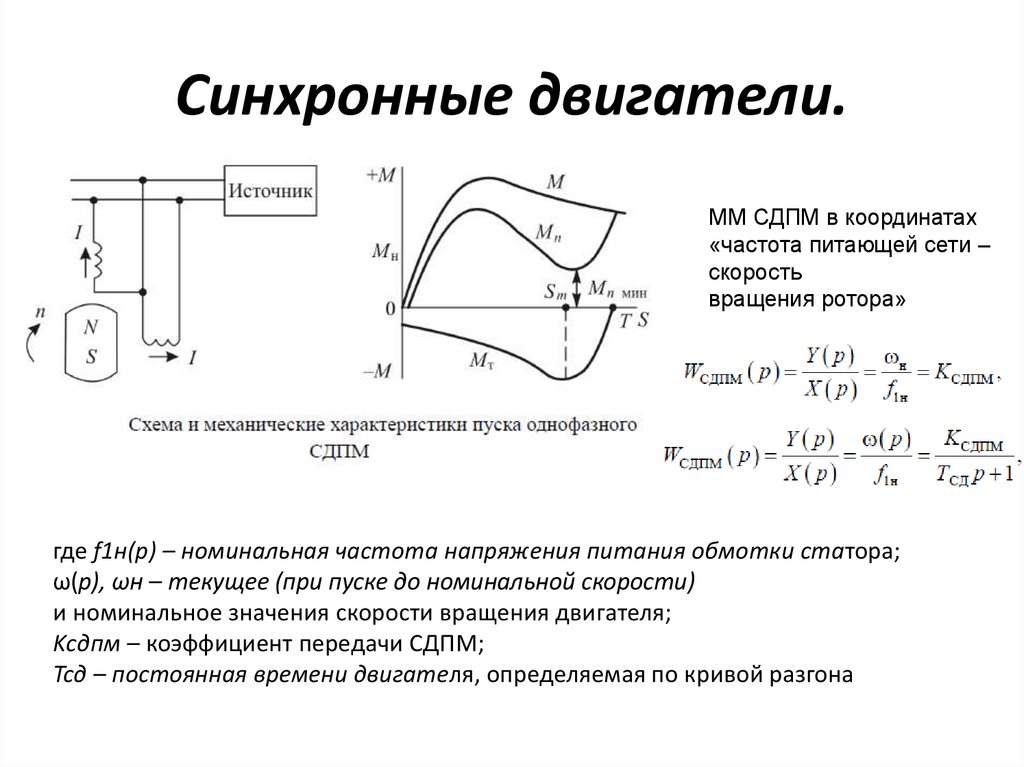
Синхронные двигатели.ММ СДПМ в координатах
«частота питающей сети –
скорость
вращения ротора»
где f1н(р) – номинальная частота напряжения питания обмотки статора;
ω(р), ωн – текущее (при пуске до номинальной скорости)
и номинальное значения скорости вращения двигателя;
Kсдпм – коэффициент передачи СДПМ;
Тсд – постоянная времени двигателя, определяемая по кривой разгона
32.
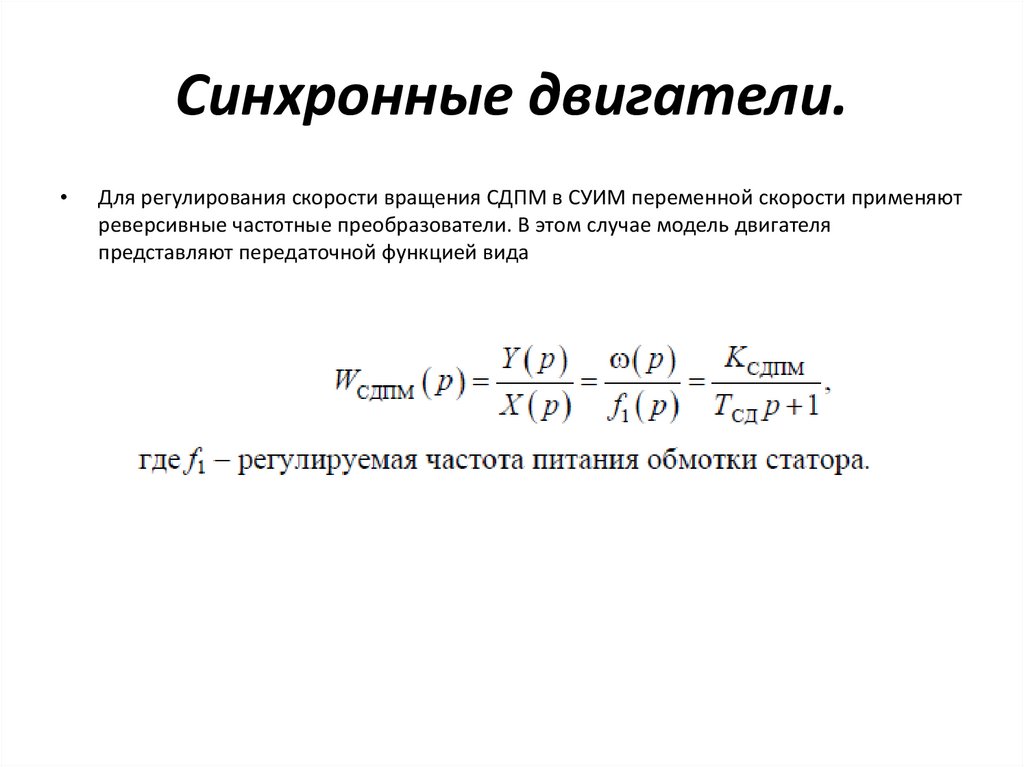
Синхронные двигатели.Для регулирования скорости вращения СДПМ в СУИМ переменной скорости применяют
реверсивные частотные преобразователи. В этом случае модель двигателя
представляют передаточной функцией вида
33.
Шаговые двигатели.• Шаговые двигатели (ШД) – это
электромеханические устройства, преобразующие
сигнал управления в угловое или линейное
перемещение ротора с фиксацией его в заданном
положении без устройств обратной связи.
Современные шаговые двигатели являются, по сути,
синхронными двигателями без пусковой обмотки на
роторе, что объясняется не асинхронным, а частотным
пуском шагового двигателя. Роторы могут быть
возбужденными (активными) и невозбужденными
(пассивными).
• В СУИМ применяются реверсивные ШД.
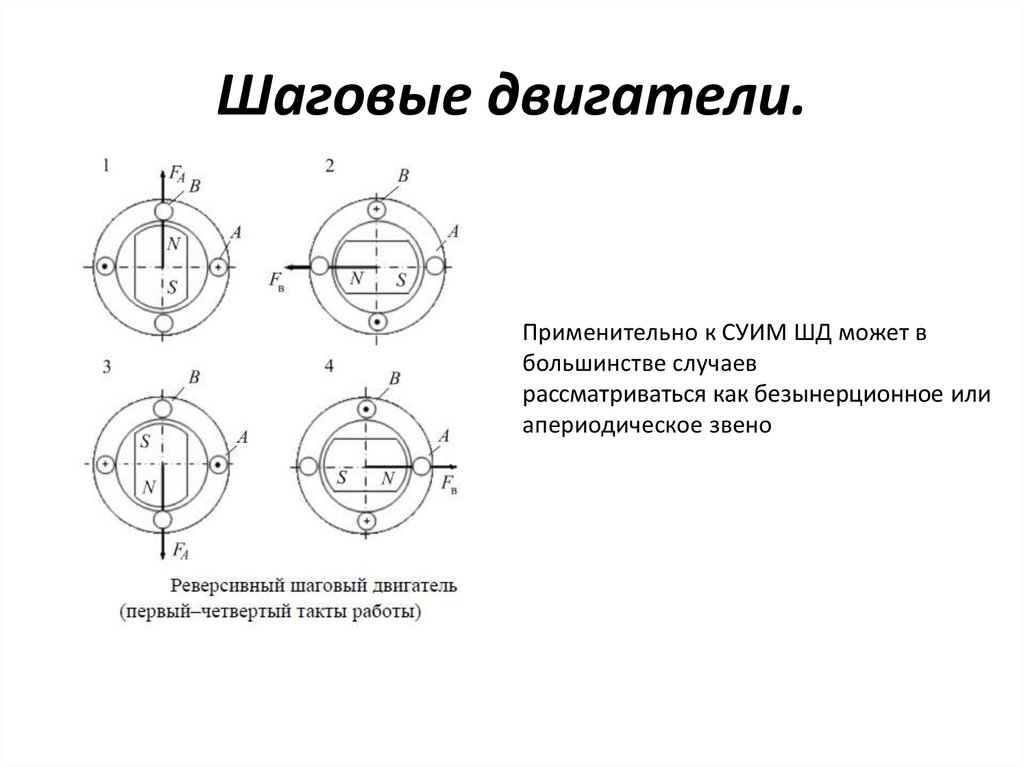
34.
Шаговые двигатели.Применительно к СУИМ ШД может в
большинстве случаев
рассматриваться как безынерционное или
апериодическое звено
35.
Силовые преобразователи энергии• служат для преобразования электрической энергии
промышленной питающей сети в электрическую энергию с
параметрами, отличающимися от параметров питающей сети.
Преобразованная энергия отличается видом напряжения,
уровнем, частотой и др.
• В СУИМ применяют следующие типы СПЭ:
• – электромагнитные усилители (в настоящее время не выпускаются
вследствие низких энергетических и регулировочных показателей);
• – электромашинные усилители-преобразователи (электромашинные
усилители, электромашинные генераторы и др.) для питания ЭИМ
передвижных, подъемно-транспортных установок, мощных ЭИМ в
бумагоделательной, металлургической промышленности и т.п.;
• – полупроводниковые (тиристорные, транзисторные, симисторные)
для питания ЭИМ самого широкого назначения;
• – электрические, пневматические, гидравлические СПЭ и их сочетания
для питания ПИМ и ГИМ.
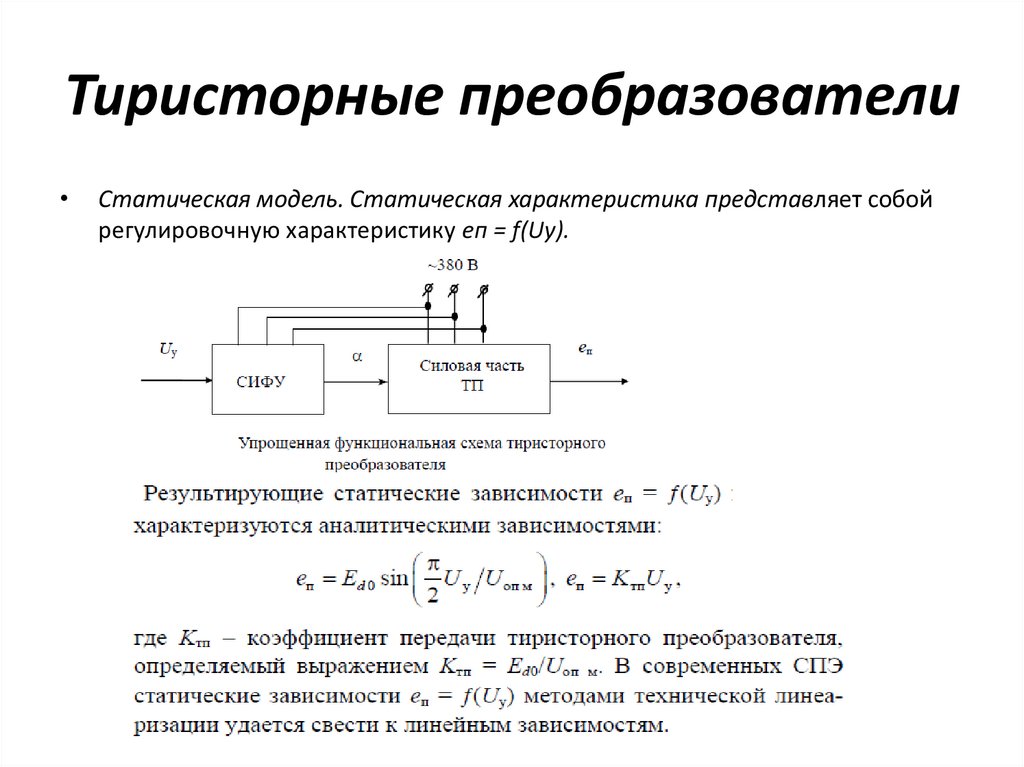
36.
Тиристорные преобразователиСтатическая модель. Статическая характеристика представляет собой
регулировочную характеристику еп = f(Uу).
37.
Динамическая модель.Для целей синтеза САУ на практике применяют три модели:
38.
Транзисторные и симисторныепреобразователи
39.
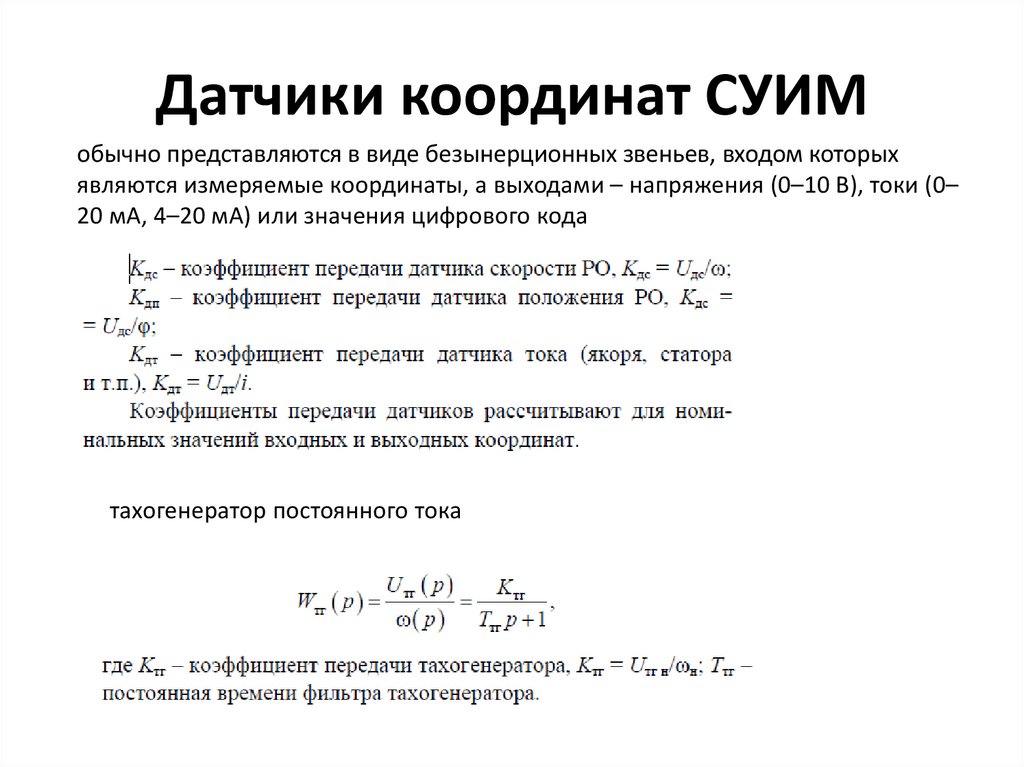
Датчики координат СУИМобычно представляются в виде безынерционных звеньев, входом которых
являются измеряемые координаты, а выходами – напряжения (0–10 В), токи (0–
20 мА, 4–20 мА) или значения цифрового кода
тахогенератор постоянного тока
40.
41.
Регуляторы и корректирующиезвенья
Независимо от технологического назначения
регуляторов (регуляторов скорости, положения
рабочего органа, давления, уровня, температуры и
т.д.) все они подразделяются на два больших класса
• параметрические регуляторы
класса «вход-выход»
• регуляторы состояния
42.
Функциональные схемы регуляторов СУИМ43.
Функциональная схема аналоговогорегулятора класса «вход-выход»
Обозначения на схеме:
A1 – операционный усилитель (усилительное звено);
Zвх, Z0 – значения комплексного сопротивления во входной цепи и в цепи
обратной связи операционного усилителя
44.
При математическом описании регуляторовприменим следующую последовательность:
1. принципиальная схема регулятора;
2. передаточная функция
3. переходная характеристика
4. переходный процесс
5. изображение блок-схемы регулятора
(функциональной схемы)
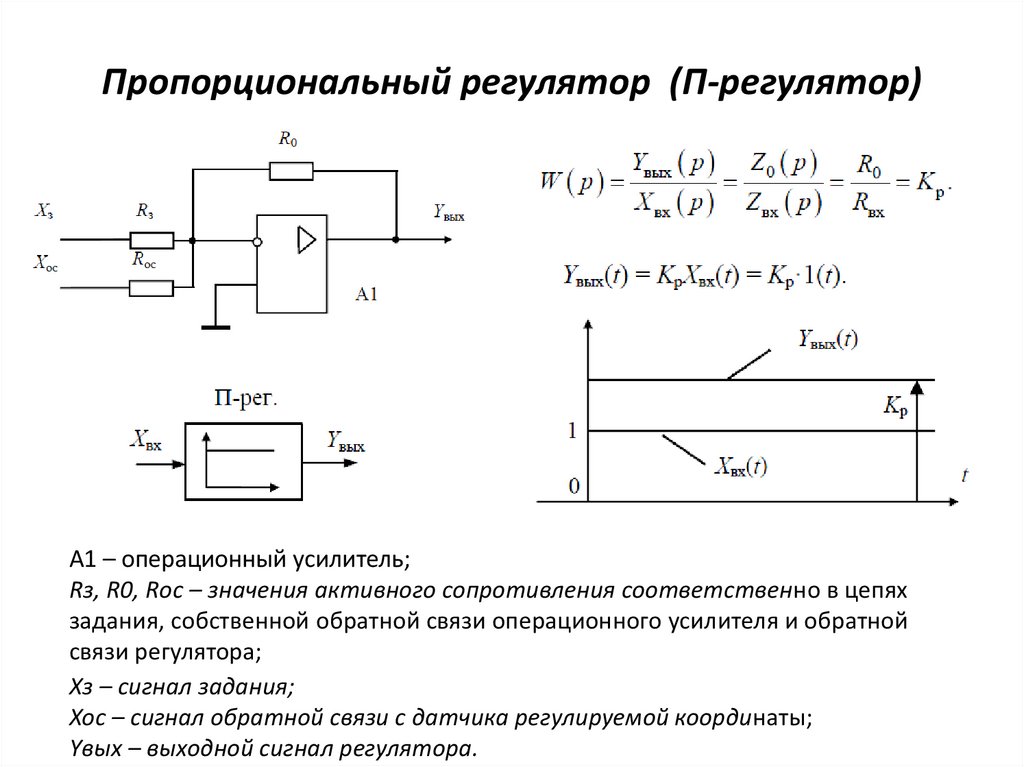
45.
Пропорциональный регулятор (П-регулятор)A1 – операционный усилитель;
Rз, R0, Rос – значения активного сопротивления соответственно в цепях
задания, собственной обратной связи операционного усилителя и обратной
связи регулятора;
Хз – сигнал задания;
Хос – сигнал обратной связи с датчика регулируемой координаты;
Yвых – выходной сигнал регулятора.
46.
Интегральный регулятор (И-регулятор)принципиальная схема И регулятора
функциональная схема
Передаточная функция
. Переходный процесс
Переходная характеристика
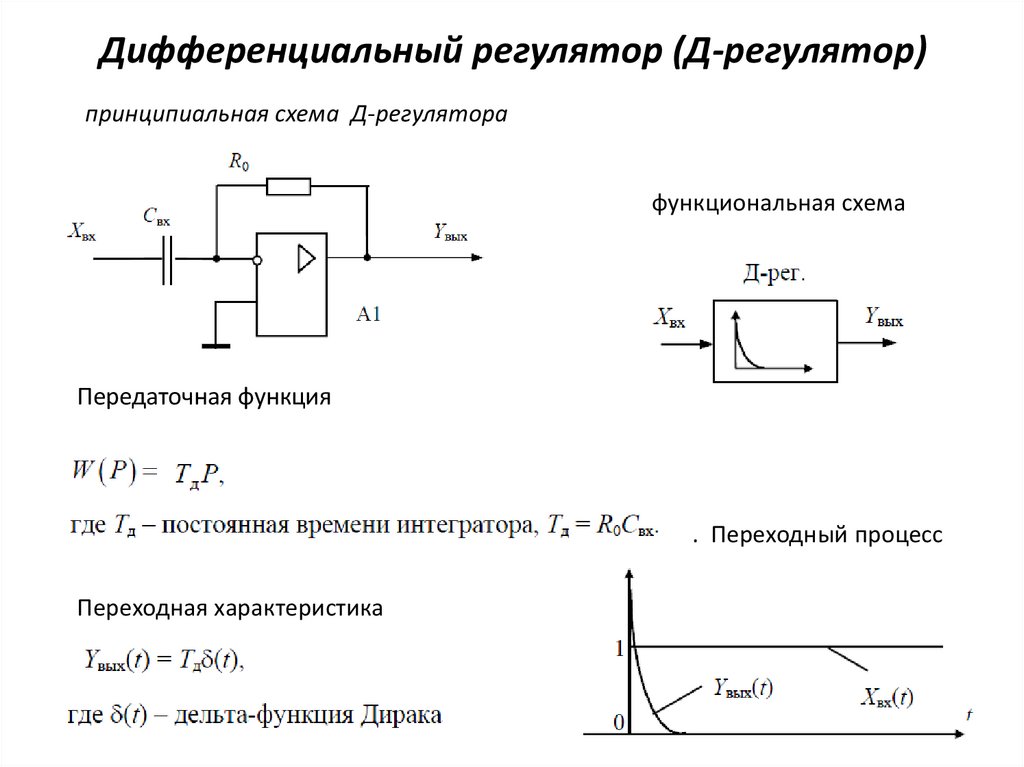
47.
Дифференциальный регулятор (Д-регулятор)принципиальная схема Д-регулятора
функциональная схема
Передаточная функция
. Переходный процесс
Переходная характеристика
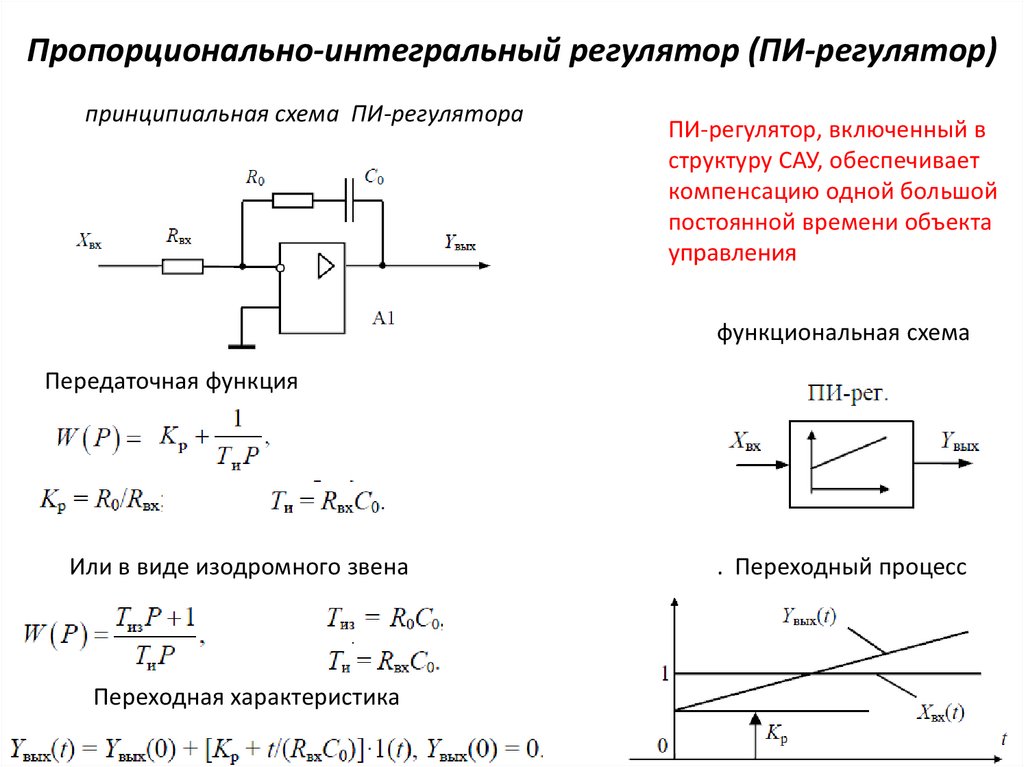
48.
Пропорционально-интегральный регулятор (ПИ-регулятор)принципиальная схема ПИ-регулятора
ПИ-регулятор, включенный в
структуру САУ, обеспечивает
компенсацию одной большой
постоянной времени объекта
управления
функциональная схема
Передаточная функция
Или в виде изодромного звена
Переходная характеристика
. Переходный процесс
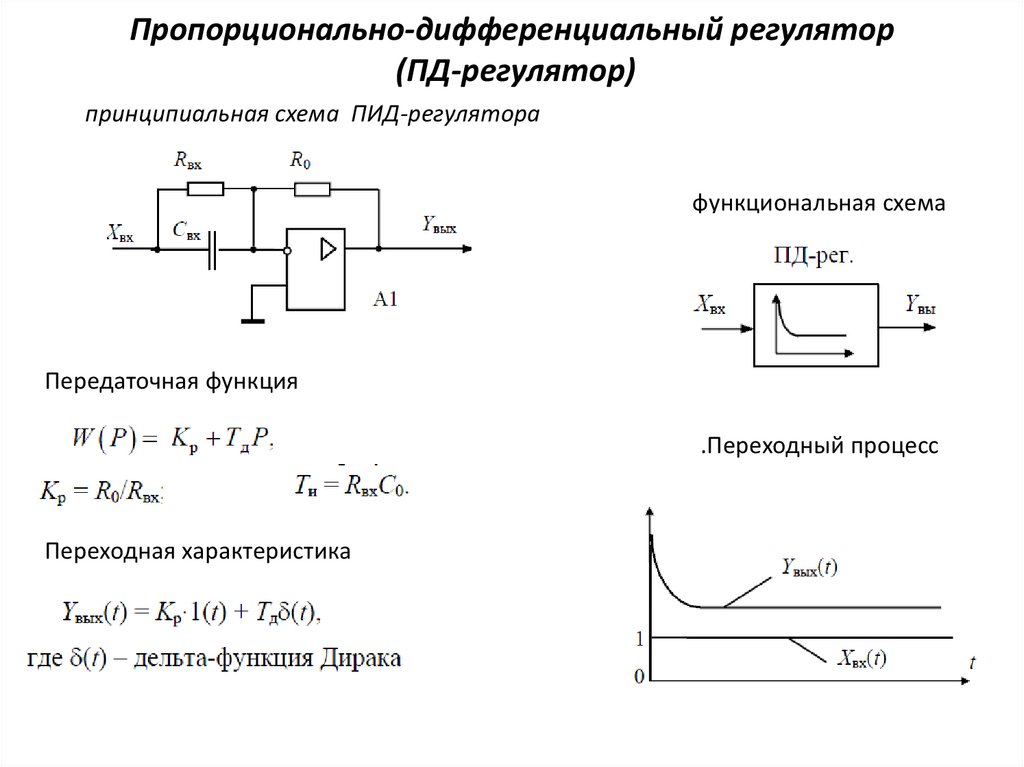
49.
Пропорционально-дифференциальный регулятор(ПД-регулятор)
принципиальная схема ПИД-регулятора
функциональная схема
Передаточная функция
.Переходный процесс
Переходная характеристика
50.
Пропорционально-интегрально-дифференциальныйрегулятор (ПИД-регулятор)
принципиальная схема ПИД-регулятора
ПИД-регулятор обеспечивает
компенсацию двух больших постоянных
времени, обеспечивая тем самым
форсирование динамических
процессов и улучшение динамики СУИМ
Передаточная функция
функциональная схема
Или в виде изодромного звена второго порядка
Переходный процесс
Переходная характеристика
51.
• Регуляторы включают, как правило, последовательно собъектом управления. Они призваны скорректировать
динамику СУИМ с целью удовлетворения требований к ее
статическим и динамическим показателям.
• Регуляторы, содержащие более одного интегратора, призваны
обеспечить астатизм СУИМ при аддитивных воздействиях не
только в виде ступенчатой функции времени, но и в виде
временной функции более сложного вида.
• При синтезе СУИМ вместо понятия «регулятор» часто
применяют понятие «корректирующее устройство»
(«корректирующее звено»), включаемое последовательно с
объектом управления или его частью, иногда – в обратной
связи по регулируемой координате.
52.
ОБЩИЕ ПРИНЦИПЫ ПОСТРОЕНИЯСУИМ
• базируются на контроле текущего состояния объекта управления и
применении обратных связей по контролируемым координатам
• Делятся на
1. разомкнутые (без ос);
2.Замкнутые
• 2.1 – стабилизации какой-либо координаты ОУ;
• 2.2– программного управления;
• 2.3 – следящие системы и системы воспроизведения движений
53.
ОБЩИЕ ПРИНЦИПЫ ПОСТРОЕНИЯСУИМ
• В зависимости от требований к статическим и динамическим
показателям управления применяют различные принципы
организации обратных и компенсирующих связей в замкнутых СУИМ:
• – по ошибке регулирования (с регулированием по отклонению
выходной координаты от заданного значения);
• – по вектору состояния ОУ (полному или редуцированному);
• – по вектору возмущающих воздействий ОУ (с регулированием по
возмущению);
• – одновременно по векторам состояния и возмущающих воздействий
(с комбинированным управлением).
• Таким образом, можно выделить два класса ЭМСУ
• – СУИМ постоянной скорости
• – СУИМ переменной скорости.
54.
СУИМ постоянной скорости• релейно-контакторные системы управления
(РКСУ)
• СУИМ постоянной скорости с
бесконтактными (полупроводниковыми)
реверсорами.
55.
Релейно-контакторные СУИМ(РКСУ)
• Релейно-контакторные системы управления (РКСУ)
реализуются по принципу разомкнутого управления и
применяются для управления электроприводами
производственных механизмов, у которых не
предъявляется высоких требований к качеству управления
и ограничению координат СУИМ на допустимых уровнях
• Наибольшее применение в РКСУ нашли одно- и
трехфазные асинхронные двигатели
56.
• Типовые узлы электрических схем РКСУ,осуществляющих пуск,
торможение и реверсирование
электродвигателя
57.
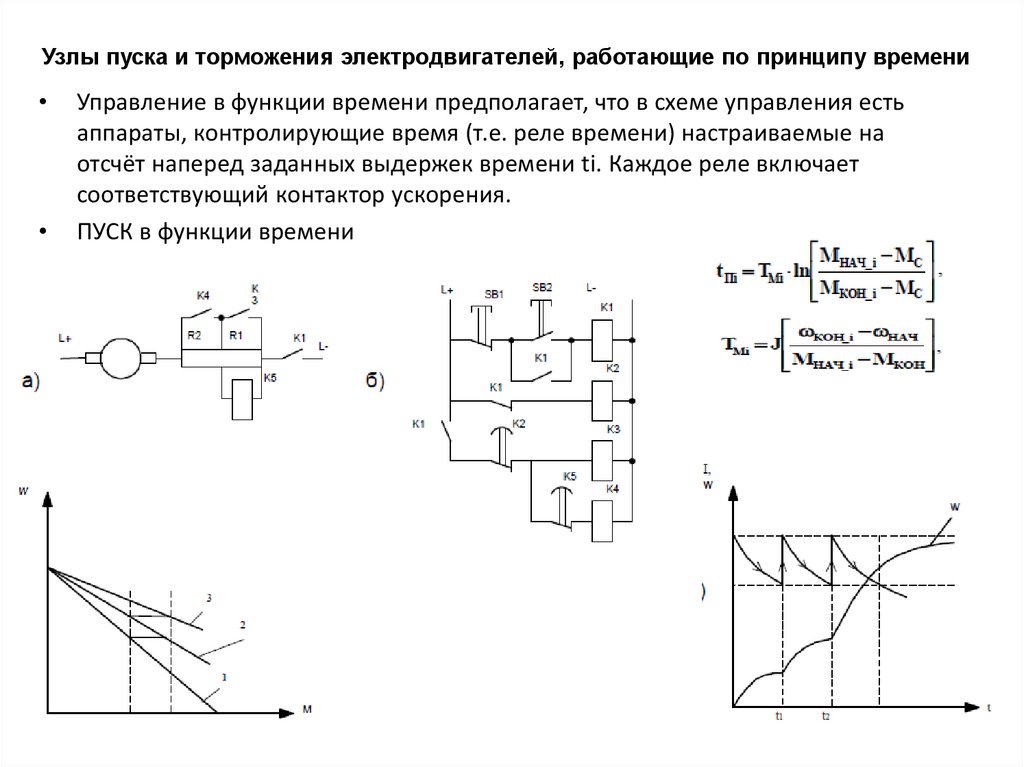
Узлы пуска и торможения электродвигателей, работающие по принципу времениУправление в функции времени предполагает, что в схеме управления есть
аппараты, контролирующие время (т.е. реле времени) настраиваемые на
отсчёт наперед заданных выдержек времени ti. Каждое реле включает
соответствующий контактор ускорения.
ПУСК в функции времени
58.
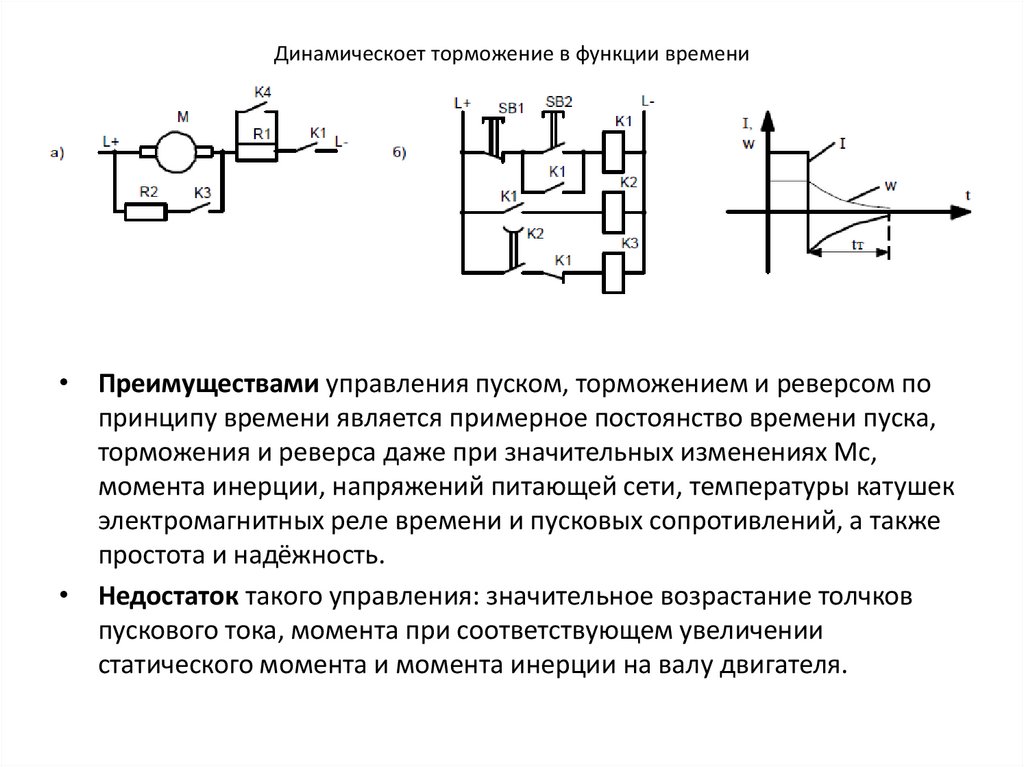
Динамическоет торможение в функции времени• Преимуществами управления пуском, торможением и реверсом по
принципу времени является примерное постоянство времени пуска,
торможения и реверса даже при значительных изменениях Мс,
момента инерции, напряжений питающей сети, температуры катушек
электромагнитных реле времени и пусковых сопротивлений, а также
простота и надёжность.
• Недостаток такого управления: значительное возрастание толчков
пускового тока, момента при соответствующем увеличении
статического момента и момента инерции на валу двигателя.
59.
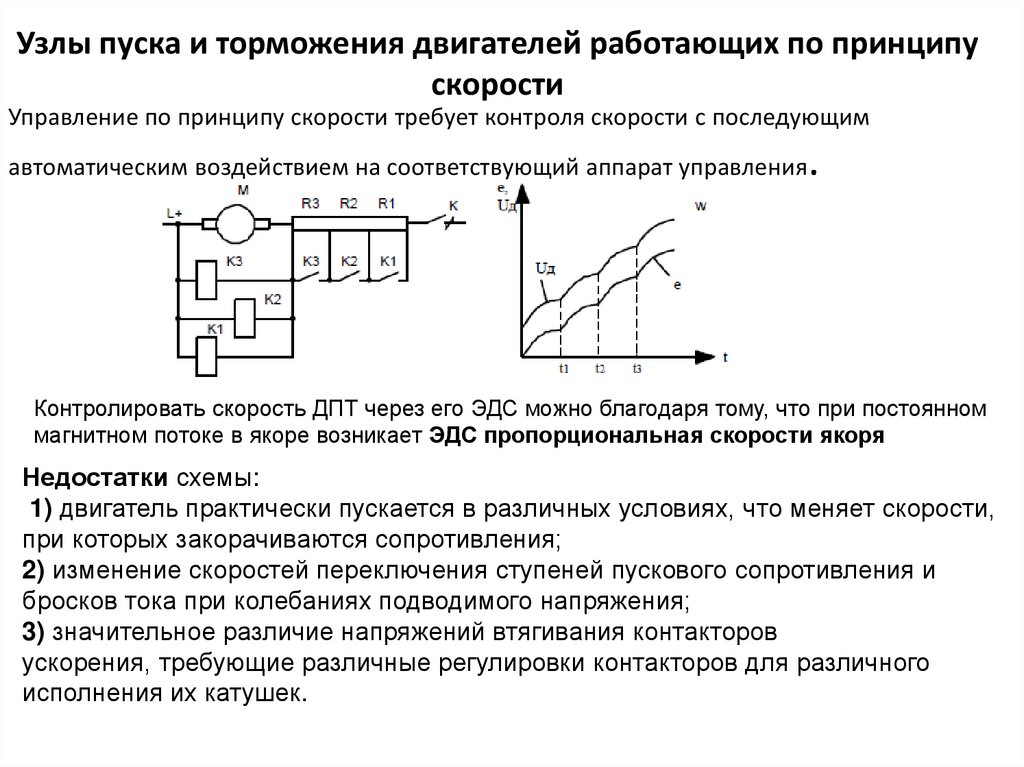
Узлы пуска и торможения двигателей работающих по принципускорости
Управление по принципу скорости требует контроля скорости с последующим
автоматическим воздействием на соответствующий аппарат управления
.
Контролировать скорость ДПТ через его ЭДС можно благодаря тому, что при постоянном
магнитном потоке в якоре возникает ЭДС пропорциональная скорости якоря
Недостатки схемы:
1) двигатель практически пускается в различных условиях, что меняет скорости,
при которых закорачиваются сопротивления;
2) изменение скоростей переключения ступеней пускового сопротивления и
бросков тока при колебаниях подводимого напряжения;
3) значительное различие напряжений втягивания контакторов
ускорения, требующие различные регулировки контакторов для различного
исполнения их катушек.
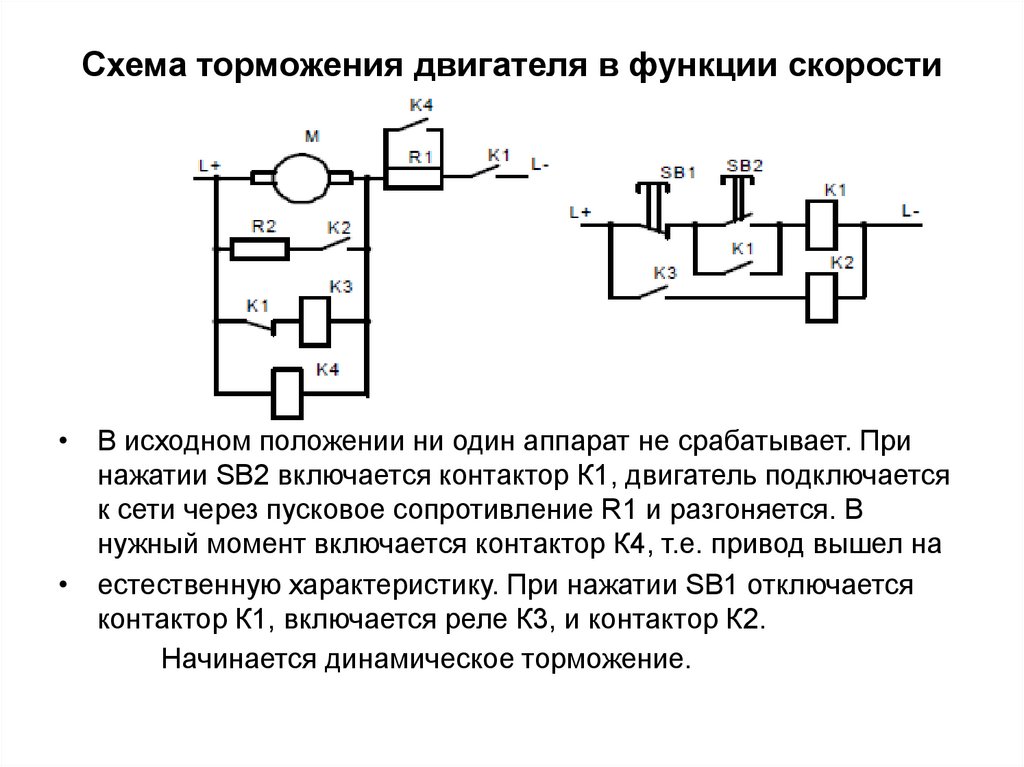
60.
Схема торможения двигателя в функции скорости• В исходном положении ни один аппарат не срабатывает. При
нажатии SB2 включается контактор К1, двигатель подключается
к сети через пусковое сопротивление R1 и разгоняется. В
нужный момент включается контактор К4, т.е. привод вышел на
• естественную характеристику. При нажатии SB1 отключается
контактор К1, включается реле К3, и контактор К2.
Начинается динамическое торможение.
61.
• Достоинства узлов схем работающих попринципу скорости: простота и дешевизна.
• Недостатки: зависимость времени пуска и
торможения от величины статического
момента, момента инерции, напряжения
питающей сети, температуры сопротивлений и
катушек, а также возможность задержки
процесса пуска на промежуточной скорости
вращения и перегревания пусковых
сопротивлений, а также трудность настройки
контакторов на различные напряжения
втягивания
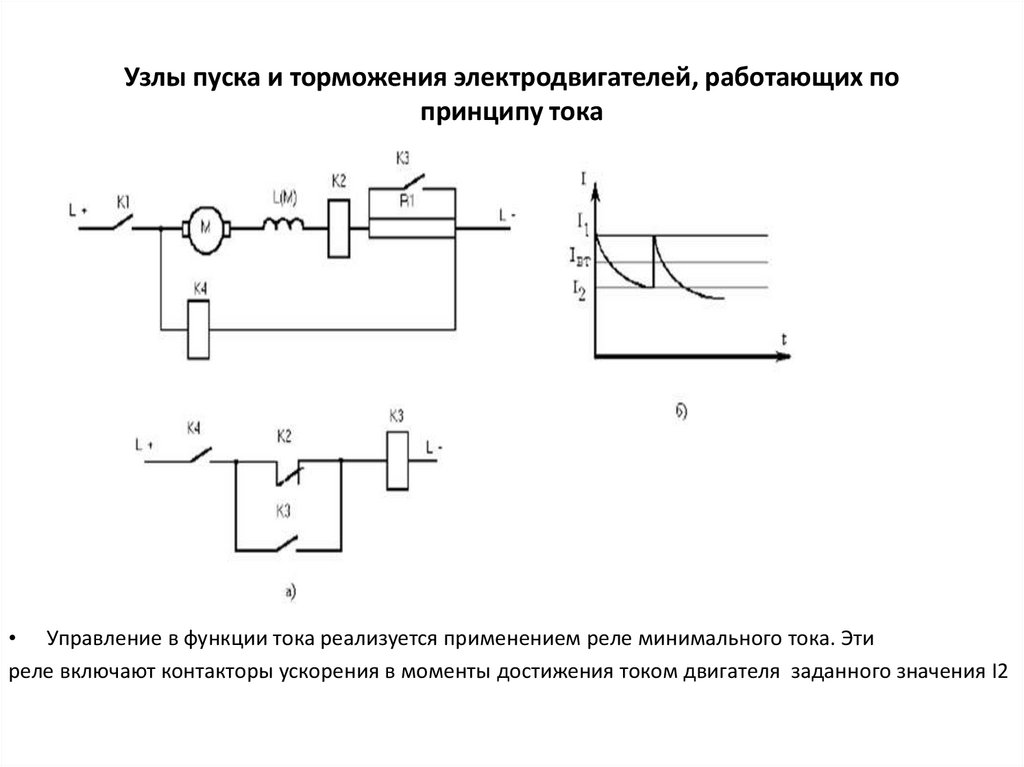
62.
Узлы пуска и торможения электродвигателей, работающих попринципу тока
• Управление в функции тока реализуется применением реле минимального тока. Эти
реле включают контакторы ускорения в моменты достижения током двигателя заданного значения I2
63.
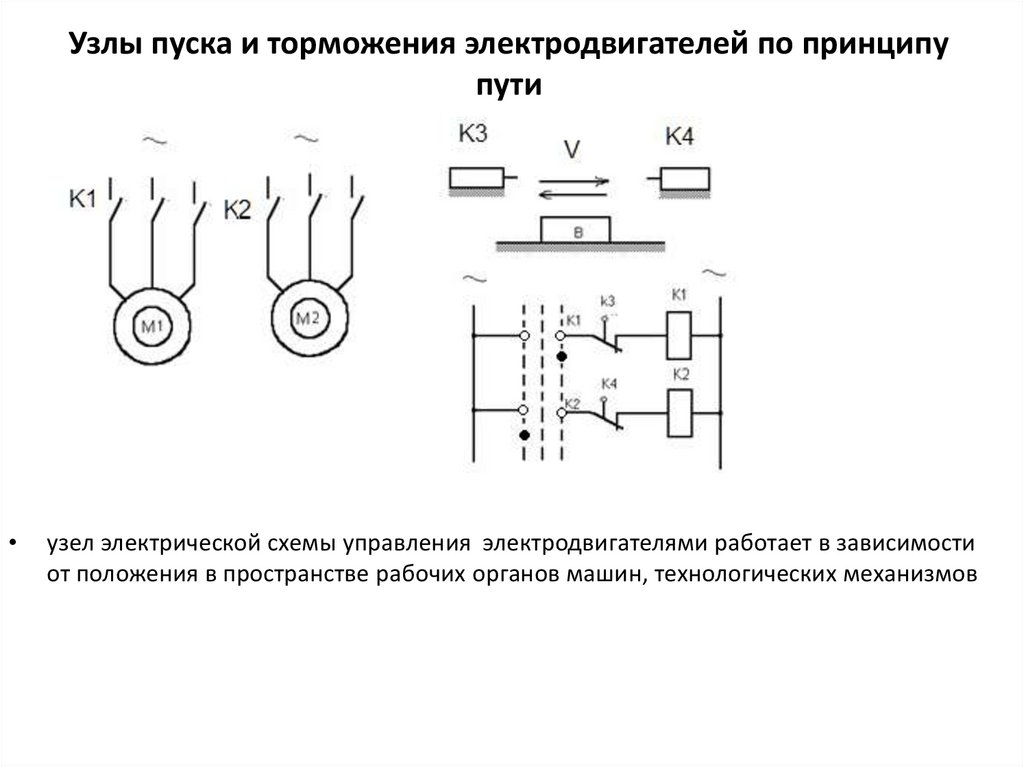
Узлы пуска и торможения электродвигателей по принципупути
узел электрической схемы управления электродвигателями работает в зависимости
от положения в пространстве рабочих органов машин, технологических механизмов
64.
Типовые узлы схем автоматического управления электроприводамипеременного и постоянного тока
Если питающая сеть и сама машина допускают прямое включение на полное
напряжение, то осуществляется прямой пуск подключением статора асинхронной машины с
короткозамкнутым ротором к питающей сети. Для асинхронных двигателей Iпуск = (5-7) Iн.
В иных случаях прибегают к схемам
а) - с активными сопротивлениями;
б) - с дросселями (реакторами);
в) – автотрансформаторами
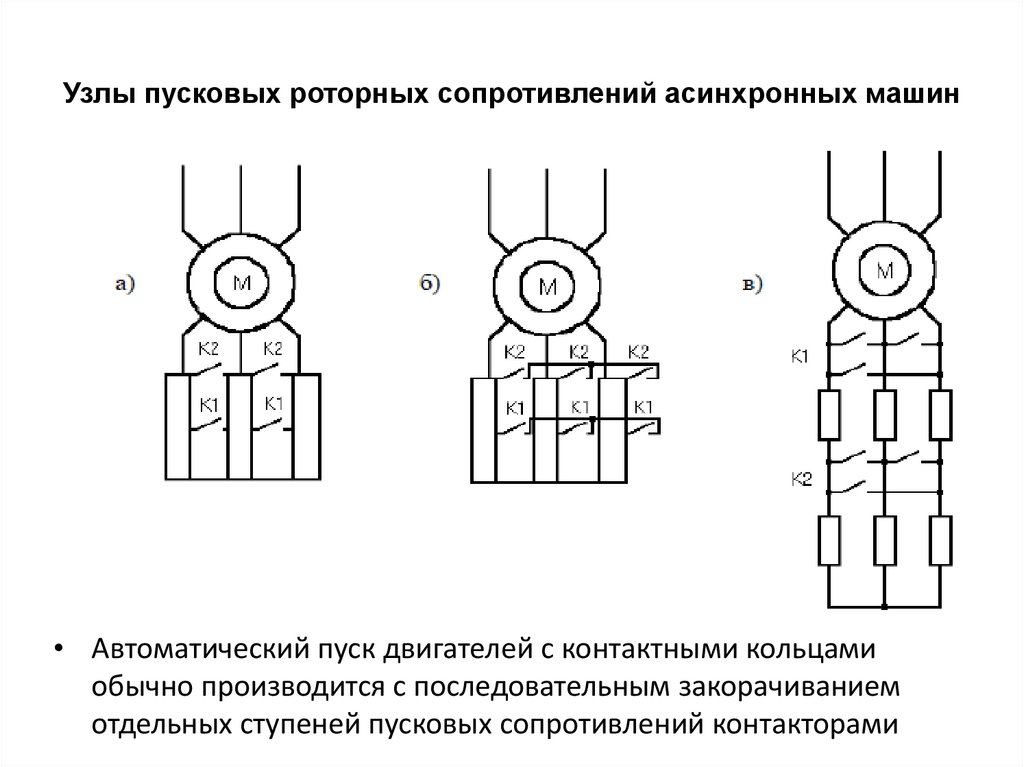
65.
Узлы пусковых роторных сопротивлений асинхронных машин• Автоматический пуск двигателей с контактными кольцами
обычно производится с последовательным закорачиванием
отдельных ступеней пусковых сопротивлений контакторами
66.
Узлы схем, обеспечивающие пуск синхронных машин (СМ)Наиболее простым способом пуска СМ является пуск с подключенным
напряжение возбуждения. Такой пуск осуществляется у машин с глухо
подключенным возбудителем, где :
а) время разгона меньше времени самовозбуждения возбудителя (ГПТ)
б) момент статического сопротивления не превышает 40% Мн, т.е. Мс≤0,4Мн
(иначе выпадение из синхронизма). В этом случае синхронизация
осуществляется автоматически, а схема управления машины упрощается
Разрядное сопротивление ограничивает напряжение обмотки ротора при пуске,
улучшает механическую характеристику и обеспечивает ускоренное гашение
поля при отключении машины от сети
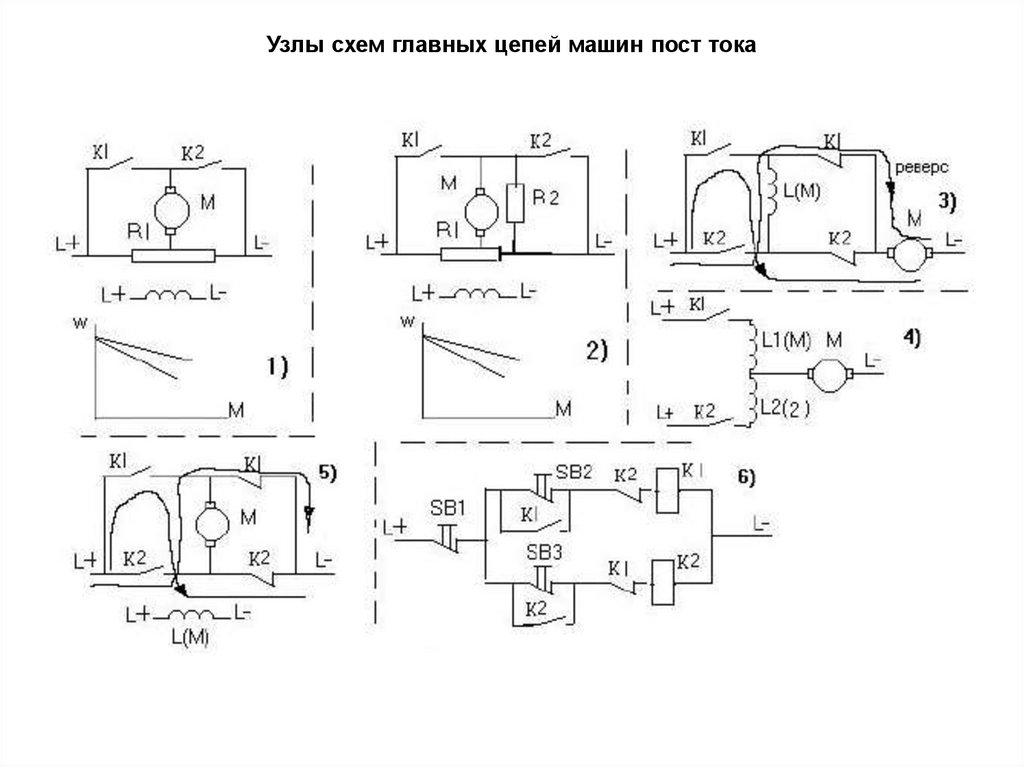
67.
Узлы схем главных цепей машин пост тока68.
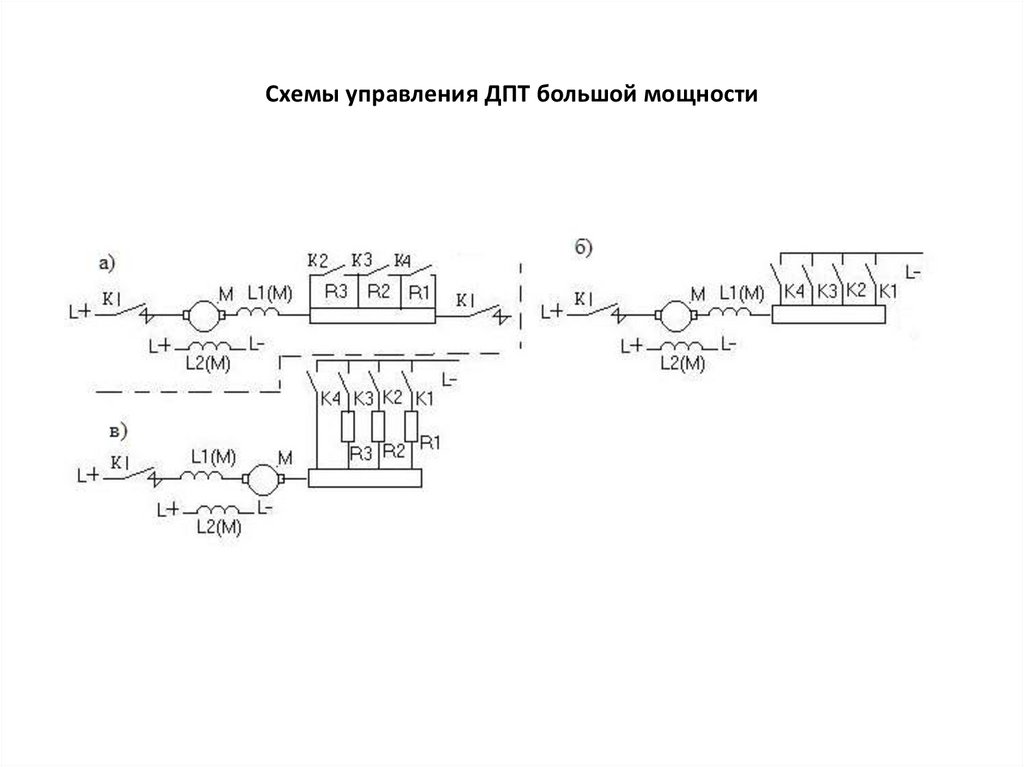
Схемы управления ДПТ большой мощности69.
Узлы защиты ИМПрименяются следующие виды защит:
1. нулевая;
2. максимально и минимально токовая;
3. тепловая;
4. специальные виды.
70.
• Нулевая защита обеспечивает защиту от самозапуска двигателей причрезмерном
снижении или кратковременном исчезновении напряжения питающей
сети. Защита осуществляется линейными контакторами и
автоматическими выключателями
• Максимально токовая защита обеспечивает защиту двигателей,
преобразователей и элементов схемы управления от кз. Она
осуществляется плавкими предохранителями, максимально токовыми
реле и автоматическими выключателями.
ИЛИ!
71.
• Тепловая защита обеспечивает защиту двигателей от перегрузки. Онаосуществляется электротепловыми, максимально-токовыми реле и
автоматическими выключателями с тепловыми расцепителями.
Электротепловые реле включаются в 2-е фазы непосредственно или
через трансформаторы тока
• В повторно-кратковременных режимах ЭП, когда характеристики
нагрева реле и двигателей различны, защита от перегрузок
двигателей осуществляется с помощью максимально токовых реле FA
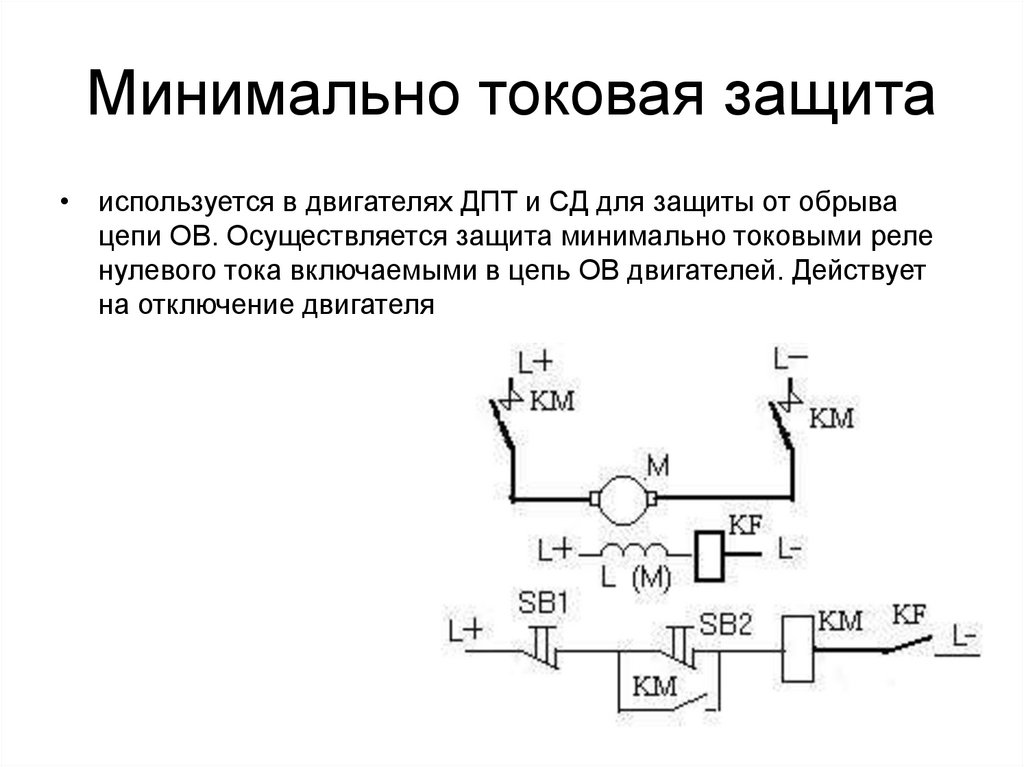
72.
Минимально токовая защита• используется в двигателях ДПТ и СД для защиты от обрыва
цепи ОВ. Осуществляется защита минимально токовыми реле
нулевого тока включаемыми в цепь ОВ двигателей. Действует
на отключение двигателя
73.
Специальные защиты присущи отдельным двигателям или установкам
в целом , к ним относятся :
1. Защиты от перенапряжений на обмотке возбуждения ДПТ .
2. Защиты от превышения напряжения в системе «Преобразователь –
Двигатель».
3. Защита от превышения скорости.
4. Путевая защита (от движения рабочего органа
далее конечного положения).
5. Защита от затянувшегося пуска СД.
74.
Блокировки и сигнализации• Блокировки в электрических схемах обеспечивают
правильный порядок работы схем, исключают ложные
срабатывания и повышают надежность работы СУЭП.
• По назначению блокировки бывают:
• 1. Технологические.
• 2. Защитные.
• По исполнению:
• 1. Внутренние (осуществляемые между аппаратами
одной системы управления).
• 2. Внешние (осуществляемые между схемами
различных систем управления)
75.
• Технологические блокировки используются дляосуществления заданной последовательности
работы схемы
• К защитным блокировкам относят:
• 1. Путевые.
• 2.Блокировки защищающие операторов от
неправильных действий.
76.
Сигнализации:• 1. Контрольная – для контроля наличия того или иного
сигнала, или напряжения питания и истинного состояния
включающих и отключающих аппаратов.
• 2. Технологическая - указывает последовательность
операций совершаемых системой ЭП.
• 3. Аварийная – указывает на аварийное состояние в ЭП,
технологии, либо в системе ЭП.
77.
Принципиальная электрическая схема станции ПУ-5522управления короткозамкнутым АД
1
78.
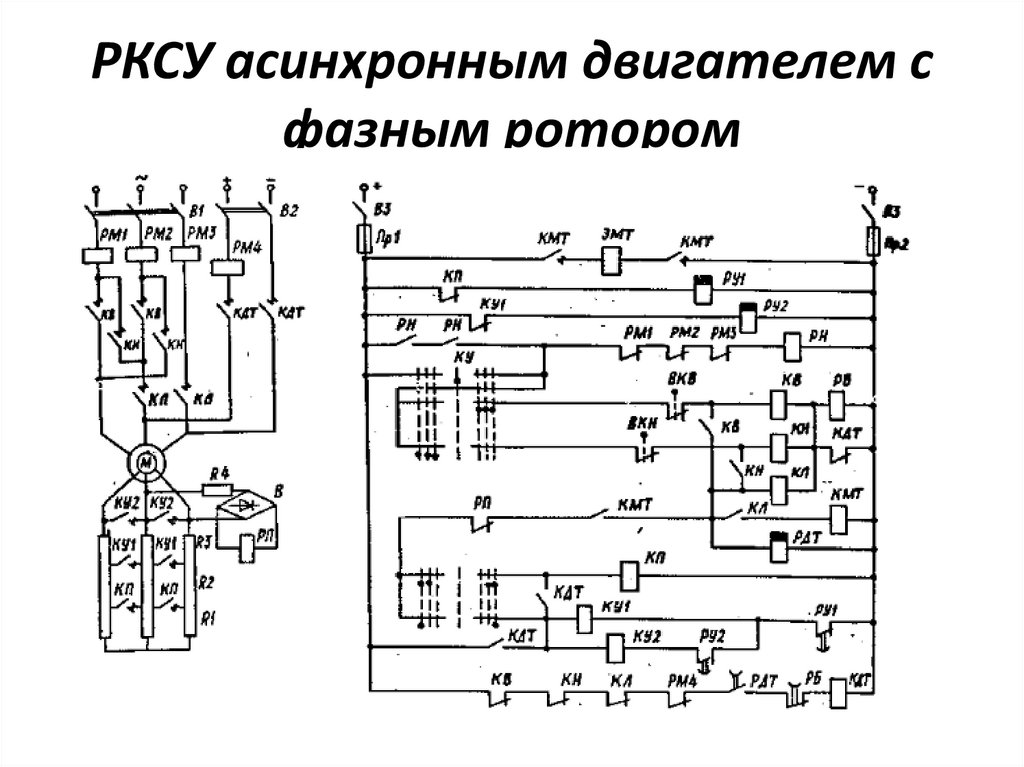
РКСУ асинхронным двигателем сфазным ротором
79.
Бесконтактные СУИМ постоянной скоростиПо принципу управления такие СУИМ подразделяются на следующие типы:
– ручного управления «на месте» с помощью кнопок или ключей управления на
стационарном или местном переносном проводном пульте управления без обратных
связей по координатам объекта управления;
• – ручного дистанционного управления по командам оператора, передаваемым по
промышленной сети от пульта управления, промышленного контроллера, сервера
верхнего уровня управления;
• без обратных связей по координатам объекта управления;
• – ручного/автоматического управления «на месте» или дистанционного управления с
контролем как минимум выходной ко ординаты объекта управления, по
промышленной сети от пульта управления, промышленного контроллера, сервера
верхнего уровня управления;
• – ручного/автоматического управления «на месте» или дистанционного управления с
реализацией функций интеллектуального микропроцессорного управления.
!!!!!! все бесконтактные СУИМ постоянной скорости содержат как минимум
бесконтактные малоточные элементы управления (транзисторы, симисторы,
тиристоры), как максимум – бесконтактные силовые элементы (симисторы или
тиристоры).
80.
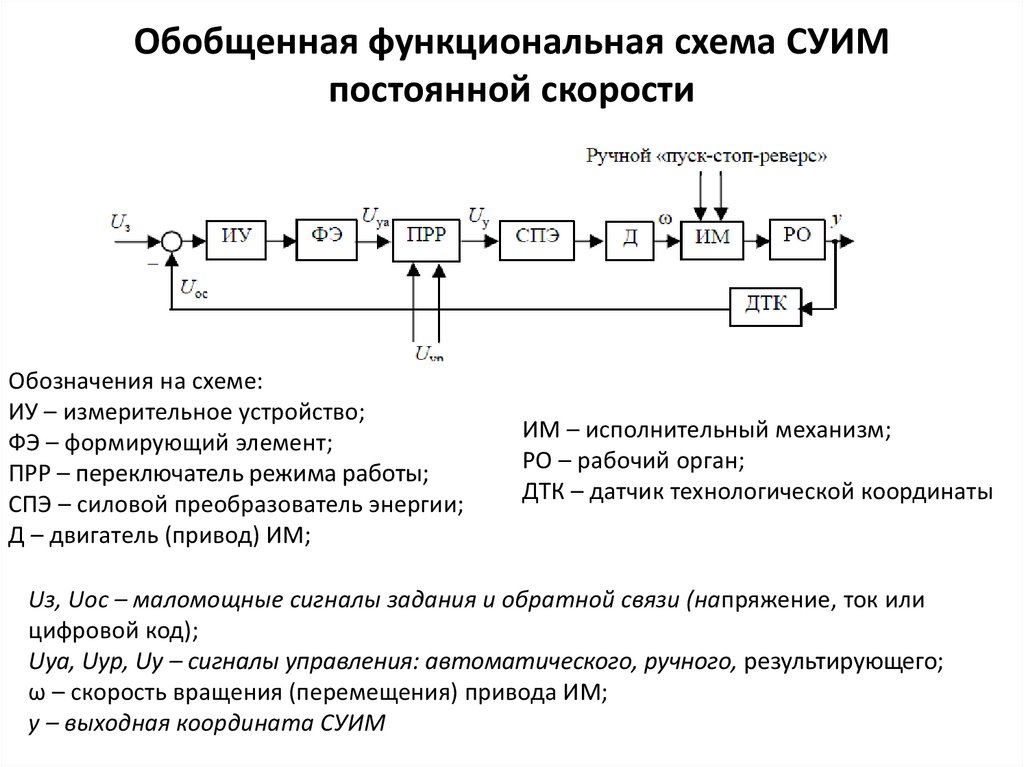
Обобщенная функциональная схема СУИМпостоянной скорости
Обозначения на схеме:
ИУ – измерительное устройство;
ФЭ – формирующий элемент;
ПРР – переключатель режима работы;
СПЭ – силовой преобразователь энергии;
Д – двигатель (привод) ИМ;
ИМ – исполнительный механизм;
РО – рабочий орган;
ДТК – датчик технологической координаты
Uз, Uос – маломощные сигналы задания и обратной связи (напряжение, ток или
цифровой код);
Uуа, Uур, Uу – сигналы управления: автоматического, ручного, результирующего;
ω – скорость вращения (перемещения) привода ИМ;
y – выходная координата СУИМ
81.
Функции и реализации алгоритмовФЭ
Релейно-импульсное управление (двух- и трехпозиционное) формируется релейными
регуляторами с широтно-импульсной (ШИМ) или время-импульсной (ВИМ) модуляцией
при постоянном уровне задания скорости движения ИМ на время включения ЭИМ.
Широтно-импульсное управление ЭИМ предполагает задание двух параметров –
периода T и скважности λ задания постоянной номинальной скорости двигателя.
Релейно-импульсное управление с ВИМ модуляцией, как и с ШИМ модуляцией, также
позволяет реал. Частота следования импульсов управления и, соответственно,
включения ЭИМ, в начальный период времени значительно выше, чем в последующее
время. При этом аппроксимированная кривая изменения положения РО (см.
пунктирную линию на рис. 5.8) соответствует ПИ закону реализовать типовые законы
управления
82.
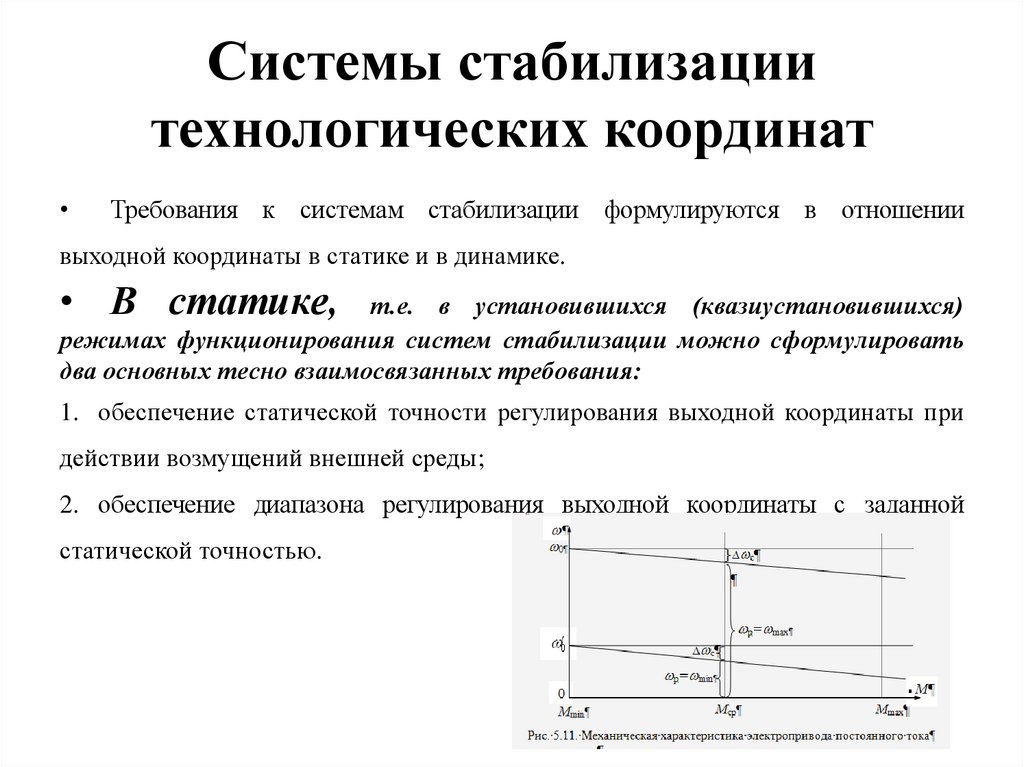
Системы стабилизациитехнологических координат
Требования к системам стабилизации формулируются в отношении
выходной координаты в статике и в динамике.
• В статике,
т.е. в установившихся (квазиустановившихся)
режимах функционирования систем стабилизации можно сформулировать
два основных тесно взаимосвязанных требования:
1. обеспечение статической точности регулирования выходной координаты при
действии возмущений внешней среды;
2. обеспечение диапазона регулирования выходной координаты с заданной
статической точностью.
83.
Статическая ошибка в системестабилизации может быть сведена к
нулю за счет
– включения интегральной составляющей в закон
регулирования
этой
координаты
(интегратора
в
структуру регулятора);
– за счет компенсации возмущений (создания
инвариантной системы в отношении возмущений);
• – реализации скользящего режима во внешнем контуре
(релейного закона управления с большой частотой
переключения реле)
84.
В динамике, т.е.
в режимах отработки системой изменений задающих и возмущающих
воздействий внешней среды, к системе стабилизации могут предъявляться следующие
требования:
а) в частотной области:
– обеспечение требуемой полосы пропускания замкнутого контура или частоты среза
разомкнутого контура регулирования;
– обеспечение требуемых запасов по амплитуде и фазе логарифмической частотной
характеристики ( L, );
б) во временной
области:
– обеспечение динамической точности стабилизации выходной координаты xвых(t);
– обеспечение быстродействия отработки ошибок регулирования при изменениях задающих
и возмущающих воздействий (с);
– обеспечение требования к допустимому перерегулированию (%), колебательности
выходной координаты xвых(t) (число колебаний) и т.п
Динамическую точность систем стабилизации оценивают по величине максимального
отклонения xmax или по величине среднеквадратичного отклонения xск по отношению к
заданному значению выходной координаты (%).
85.
Форсирование управляющеговоздействия
Кривая 1 – реакция тока возбуждения на ступенчатое задающее
воздействие без форсировки управляющего водействия, кривая 2 - реакция
тока возуждения на то же самое задающее воздействие с двухкратной
форсировкой управляющего воздействия.
Форсировка осуществляется кратковременно на время tрег1, при котором ток
возбуждения достигает заданного значения
86.
.Компенсация
времени
больших
объекта
постоянных
управления.
Выполняется после структурно-параметрической декомпозиции объекта управления
n
Tμ i
i 1
некомпенсированная малая
постоянная времени
87.
Системы программного управления, ограничениекоординат СУИМ
К системам программного управления относятся системы, задающие воздействия
которых меняются по некоторым программно-временным законам
• основные требования к программным
системам управления
• а) максимум быстродействия при
минимуме динамической ошибки
отработки любых программно-задающих
воздействий;
• б) ограничение координат СУИМ на
допустимых уровнях во всех динамических
режимах
88.
В электромеханических СУИМтребуется ограничивать, следующие
координаты
– скорость электродвигателя ( max);
– ток якоря двигателя постоянного тока (iя iя,max, iя,max= ·iя,ном, –
перегрузочная способность двигателя) или ток статора асинхронного
двигателя с короткозамкнутым ротором (ic ic,max);
– скорость изменения тока якоря двигателя на допустимом
уровне; для электрических машин обычного исполнения эта величина
составляет (20-50) номинальных значений тока за секунду;
–
ускорение
рабочего
органа)
электропривода
на
уровне,
(исполнительного
определяемом
технологического процесса, комфортности и др.
механизма,
требованиями
89.
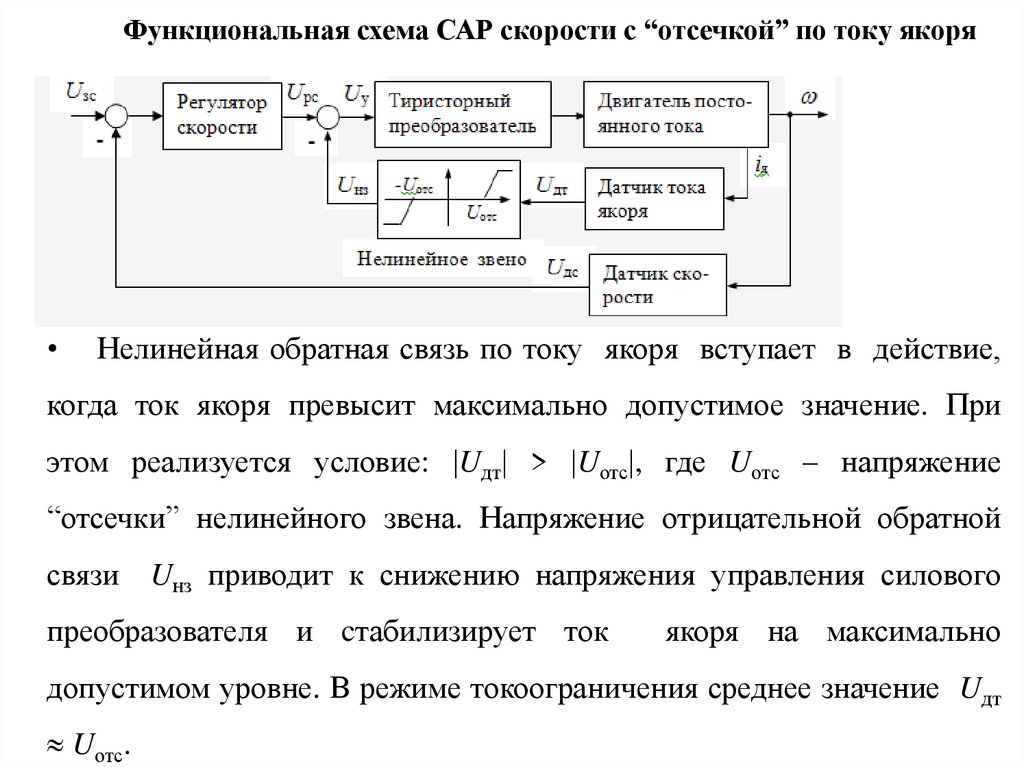
Функциональная схема САР скорости с “отсечкой” по току якоряНелинейная обратная связь по току якоря вступает в действие,
когда ток якоря превысит максимально допустимое значение. При
этом реализуется условие: Uдт > Uотс , где Uотс – напряжение
“отсечки” нелинейного звена. Напряжение отрицательной обратной
связи Uнз приводит к снижению напряжения управления силового
преобразователя и cтабилизирует ток
якоря на максимально
допустимом уровне. В режиме токоограничения среднее значение Uдт
Uотс.
90.
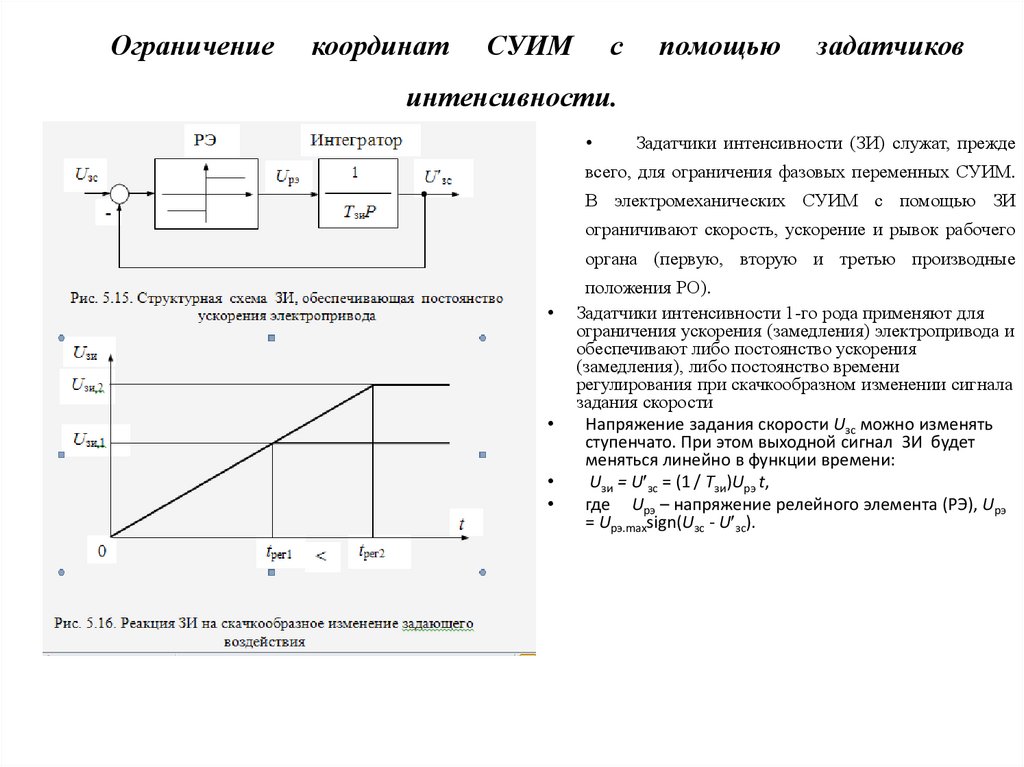
Ограничениекоординат
СУИМ
с
помощью
задатчиков
интенсивности.
Задатчики интенсивности (ЗИ) служат, прежде
всего, для ограничения фазовых переменных СУИМ.
В электромеханических СУИМ с помощью ЗИ
ограничивают скорость, ускорение и рывок рабочего
органа (первую, вторую и третью производные
положения РО).
Задатчики интенсивности 1-го рода применяют для
ограничения ускорения (замедления) электропривода и
обеспечивают либо постоянство ускорения
(замедления), либо постоянство времени
регулирования при скачкообразном изменении сигнала
задания скорости
Напряжение задания скорости Uзс можно изменять
ступенчато. При этом выходной сигнал ЗИ будет
меняться линейно в функции времени:
Uзи = U зс = (1 / Tзи)Uрэ t,
где Uрэ – напряжение релейного элемента (РЭ), Uрэ
= Uрэ.maxsign(Uзс - U зс).
91.
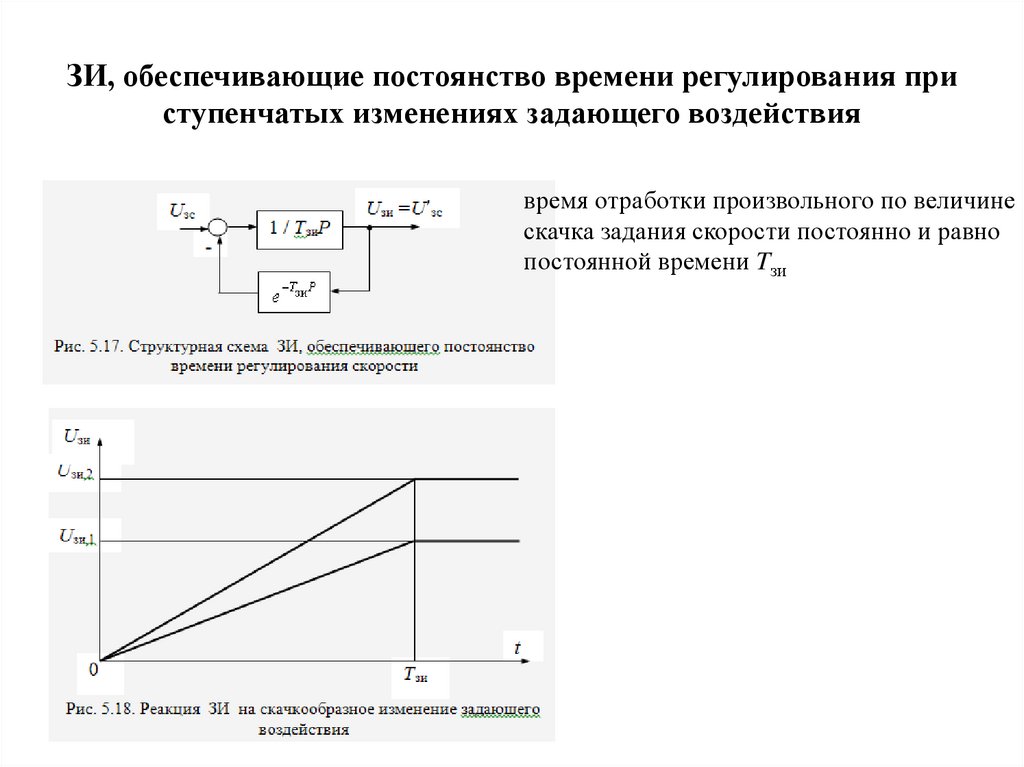
ЗИ, обеспечивающие постоянство времени регулирования приступенчатых изменениях задающего воздействия
время отработки произвольного по величине
скачка задания скорости постоянно и равно
постоянной времени Tзи
92.
Задатчик интенсивности 2-гопорядка
• в отличие от рассмотренных ЗИ содержит
интегратор 2-го порядка, что позволяет ограничить
на допустимом уровне не только первую, но и
вторую производную регулируемой координаты.
• Если он установлен на входе замкнутого контура
регулирования скорости, то на допустимых уровнях
будут ограничены ускорение и рывок РО ИМ.
Наиболее простая реализация такого ЗИ –
апериодический фильтр 2-го порядка
• .
93.
Системы следящего управления,• функционируют исключительно в режимах малых отклонений
координат, т.е. ни одна координата СУИМ (объекта управления и
регуляторов) не выходит на режим ограничения. Перемещение
рабочего органа осуществляется по произвольному, заранее
неизвестному закону, определяемому внешней средой
• Основной показатель функционирования следящих СУИМ –
динамическая точность отработки достаточно плавно изменяемого
задающего воздействия в условиях возмущающих воздействий на
систему. Полная количественная оценка точности следящих СУИМ
производится в результате анализа их работы в условиях совместного
влияния задающих и возмущающих воздействий, которые, как
правило, имеют стохастический (случайный) характер. В связи с этим
сложилась практика оценки точности этих систем по точности
воспроизведения лишь задающих воздействий, меняющихся с
постоянной скоростью, постоянным ускорением или по
гармоническому закону.
94.
Понятие добротностиДля оценки точности отработки задающих воздействий с постоянной
скоростью и ускорением
вводятся понятия добротности
САУ по
скорости и ускорению.
Добротность по скорости в следящей системе можно оценить по формуле
95.
Синтез СУИМ переменной скорости• СУИМ переменной скорости требуют, как
правило, регулирования не только самой скорости
электродвигателя, но и оптимизации режимов
изменения электрических (электромагнитных)
координат электропривода.
• В основе синтеза таких СУИМ лежит соподчинение координат объекта
управления и, соответственно, метод подчиненного регулирования
96.
Подчиненное регулированиекоординат
97.
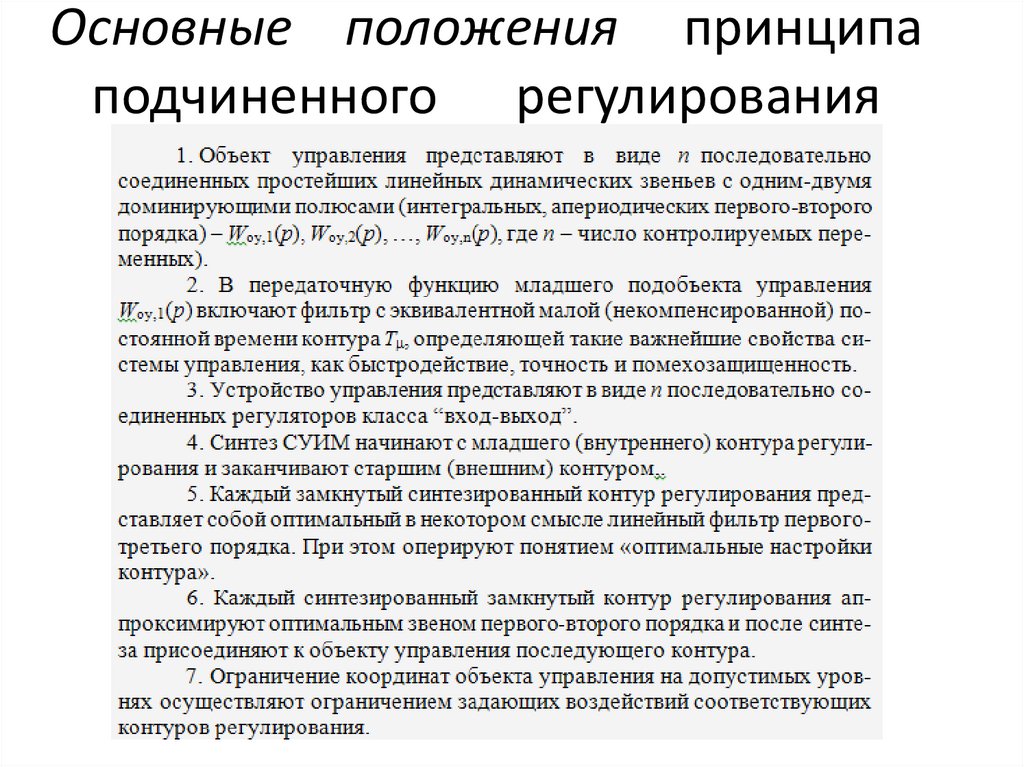
Основные положения принципаподчиненного регулирования
98.
Оптимальные настройки контуров регулирования• В многоконтурных электромеханических системах
подчиненного регулирования координат наиболее
распространены настройки отдельных контуров на
• технический (модульный),
• симметричный
• апериодический оптимумы