



















Гц малы, и поэтому их не учитывают.")








")

 в цепь ротора включается пусковой реостат, чтобы двигатель развивал пусковой")





 ток I1 равен току холостого хода I0. Как и в трансформаторе, этот ток является намагничивающим")




; 2. Понижение напряжения,")


























 переключением числа пар полюсов p")






























 electronics
electronicsSimilar presentations:

")








Асинхронный двигатель. (Лекция 4)
1.
АСИНХРОННЫЙДВИГАТЕЛЬ
(АД)
2. Номинальные данные АД на табличке корпуса: 1. Номинальная мощность – это номинальная механическая мощность на валу. 2. Линейное
3. 4. Частота вращения ротора. 5. Коэффициент мощности. 6. Коэффициент полезного действия
4. Электромагнитные процессы в асинхронном двигателе аналогичны процессам, происходящим в трансформаторе. Обмотку статора
5. АД при заторможенном роторе Вращающееся магнитное поле статора, пересекая неподвижные обмотки статора и ротора, будет
E1 4, 44 f1 w1kо1ФmE2 4, 44 f1 w2 kо2 Фm
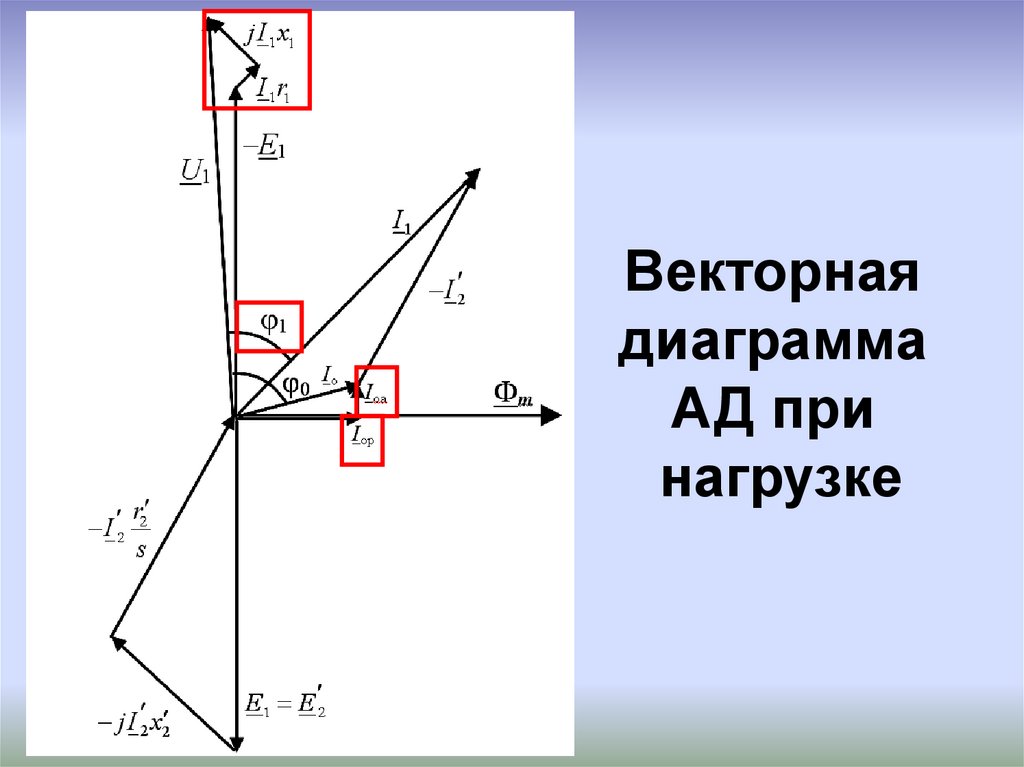
6. Ток холостого хода IO АД из-за наличия воздушного зазора между ротором и статором значительно больше, чем в трансформаторе
7. Реактивная составляющая тока Iо является намагничивающей, так как она создает поток Ф. Активная составляющая Iоа вызывается
8.
Векторнаядиаграмма
АД при
нагрузке
9. Для уменьшения тока холостого хода заводы-изготовители стремятся выполнить в асинхронных двигателях минимально возможные
10. Асинхронный двигатель при вращающемся роторе: Вращающийся магнитный поток статора, обгоняя ротор, индуктирует в нем ЭДС и токи
E2 S E2 sx2S 2πf1 L2 s x2 s
11. Ток вращающегося ротора
I2SE2 S
r2 x2 S
2
2
12. Основные уравнения приведенного АД
Уравнение равновесиянапряжений в обмотке статора
U1 E1 I 1 z 1
13. Уравнение равновесия напряжений в обмотке ротора
E2 I 2 z 2 I 2 r21 s
s
Приведение роторной обмотки
осуществляется к числу витков и
числу фаз статорной
I 1 I 0 I 2
14. Схемы замещения АД Для расчета характеристик АД и исследования различных режимов его работы удобно использовать схемы замещения
15. Большое практическое применение для анализа работы АД находит Г-образной схемой замещения
б)'
I1
r1
x1 ( I 2 )
r2
x2
r1
x1
U1
I0
rm
xm
Погрешность
в расчете
не превышает
1–5 %
r2
1 s
s
16. Обозначения: r1 и x1– активное и индуктивное сопротивления фазной обмотки статора; – приведенные активное и индуктивное
r2 и x217. параметры намагничивающей ветви схемы. Индуктивная составляющая является индуктивным сопротивлением взаимной индукции. Как и в
zm rm jxmxm
18. Сопротивление _ _ _ _ _ _ _ _ _ _ _ зависит от скольжения, и мощность, выделяемая в нем, численно равна механической мощности
1 sr2
s
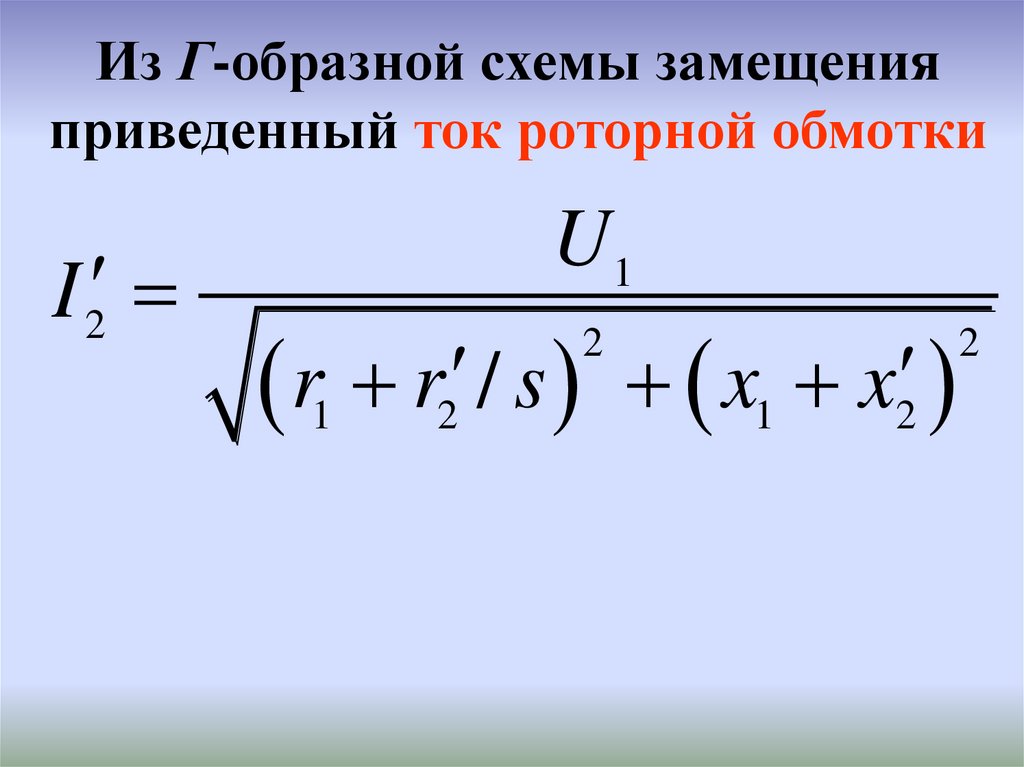
19.
Из Г-образной схемы замещенияприведенный ток роторной обмотки
I 2
U1
r r / s x
2
1
2
x
1
2
2
20. Энергетическая диаграмма АД
P2Pмех
Pэм
P1
ΔPм1
ΔPэл1
ΔPэл2
ΔPмех
ΔPдоб
21. К АД из сети подводится активная мощность
P1 3 U1л I1л cos 1Часть этой мощности затрачивается
на магнитные потери в стали ΔРм1 и
электрические потери в обмотке
статора ΔРэл1
2
ЭЛ1
1ф 1
P
=I
r
22. Остальная мощность электромагнитным путем передается на ротор и называется электромагнитной мощностью
Рэм= Р1 – ΔРм1 – ΔРэл1Частично Рэм расходуется на потери в
обмотке ротора ΔРэл2
Pэл2 3I 2Ф r2
2
23. Магнитные потери в роторе из-за малой частоты перемагничивания стали (0,5...2)Гц малы, и поэтому их не учитывают.
24. Добавочные потери ΔРдоб связаны с высшими гармониками МДС в магнитном поле из-за зубчатого строения статора и ротора. ΔРдоб
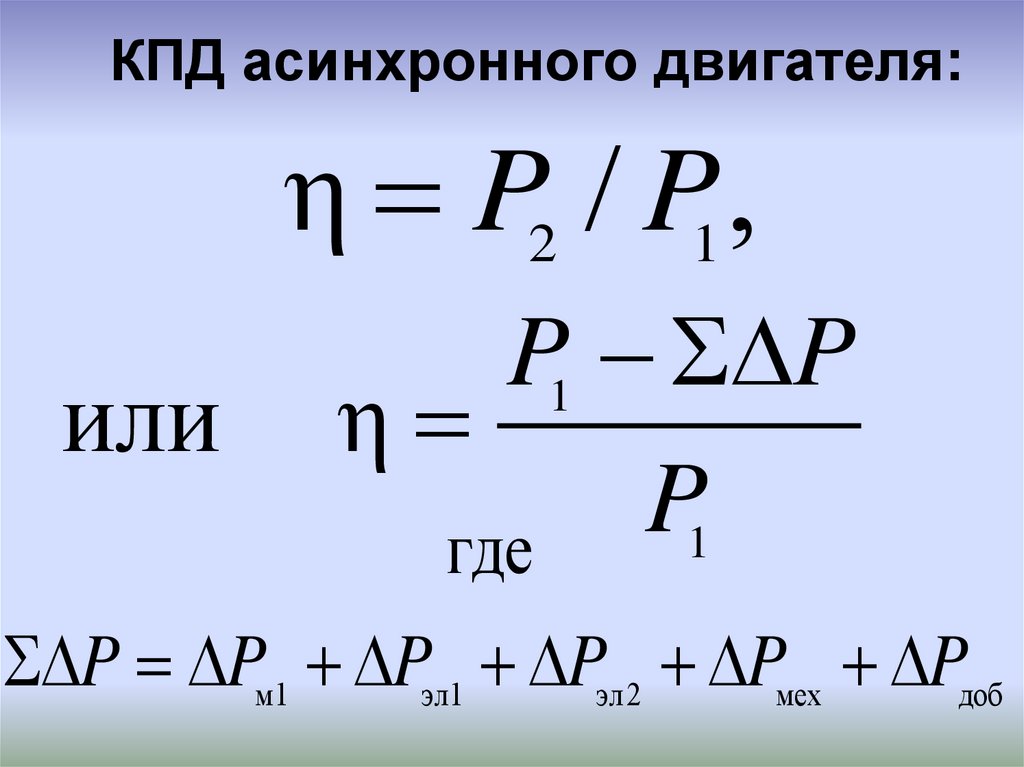
25.
КПД асинхронного двигателя:η P2 / P1 ,
или
P1 P
η
P
1
где
P Pм1 Pэл1 Pэл2 Pмех Pдоб
26. КПД асинхронных двигателей достаточно высокий – от 0,7 до 0,95, причем КПД увеличивается с повышением мощности двигателя и с
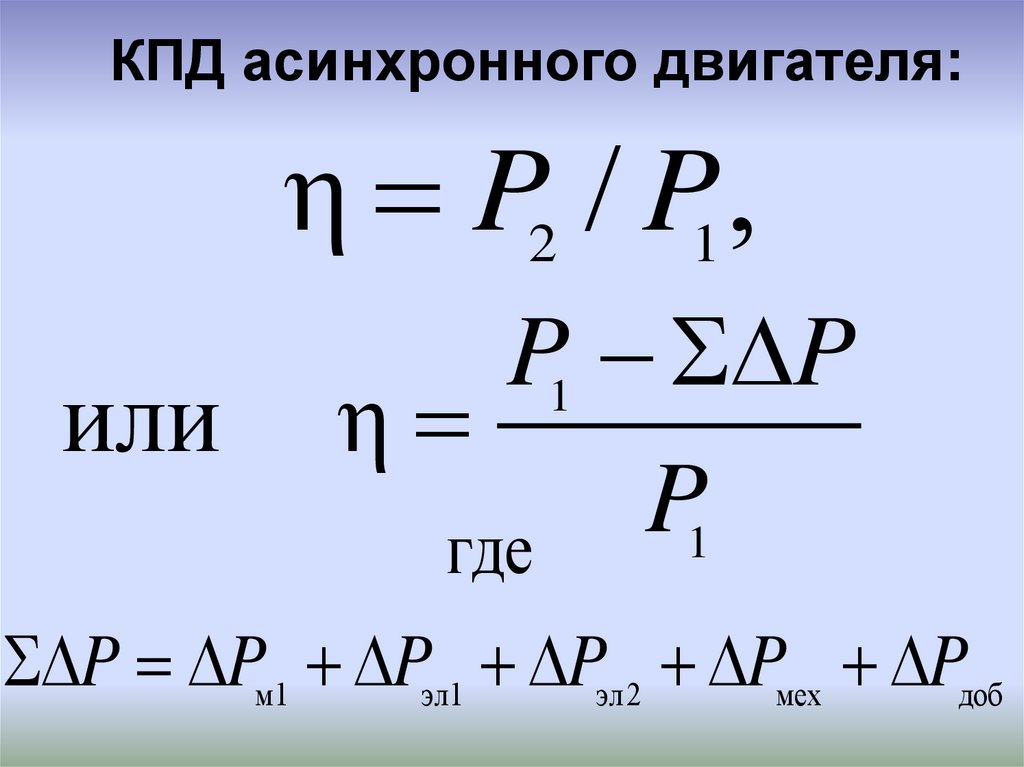
27.
КПД асинхронного двигателя:η P2 / P1 ,
или
P1 P
η
P
1
где
P Pм1 Pэл1 Pэл2 Pмех Pдоб
28. Реверс – это изменение направления вращения ротора. Необходимо изменить направление вращения магнитного поля статора, что в
Реверс29.
30.
31.
32.
33.
Рассчитать механическуюхарактеристику можно по
паспортным данным АД с
помощью формул М. Клосса:
2 М макс
М
,
s sкр
sкр s
n 2 n1 1 s .
34. Пусковые свойства двигателя характеризуются кратностью пускового момента Перегрузочная способность двигателя оценивается
kп M п / M н , kп 0,9...1,5.M макс
kм
,
Mн
kм 1,7...3,4
35.
Критическое скольжениеr2
при sкр
x1 x2
Максимальный момент
2
M макс
3 U1
2 1 x1 x2
36. Зависимость М = f(s)
Генераторn1
M
n2 M
макс
Mн
-Sкр
Электромагнитны
тормоз
Двигатель
2
1
0 Sн
n2
n1
n2
3
Sкр
-Mмакс
+1
Mп
+S
n1
37. Максимальный момент не зависит от активного сопротивления обмотки ротора , однако это сопротивление оказывает влияние на
2M макс
3 U1
2 1 x1 x2
r2
r2
sкр
x1 x2
38. Для двигателей с фазным ротором при пуске (s = 1) в цепь ротора включается пусковой реостат, чтобы двигатель развивал пусковой
r2 rпускsкр
1,
x1 x2
x1 x2 r2 ,
rпуск
39.
Зависимости М = f(s)при различных значениях
сопротивления пускового реостата
40. Зависимость М ≡ U12 является недостатком АД. Например, если U1 понизится на 25%, т. е. U1 = 0,75U1н, то при этом кратность
41. Рабочие характеристики асинхронного двигателя При изменении нагрузки двигателя происходит изменение тока I1, мощности P1,
42. Схема для определения характеристик АД Метод непосредствен-ной нагрузки
VW2
W1
A
АД
Т
43. Примерный вид рабочих характеристик АД
I1; P1; η;cosφ1;
n2; s; M2
cosφ1
n2
M2
P1
η
I1
P10
I10
cosφ10
s
0
P2
44. При холостом ходе (P2=0 и M2=0) ток I1 равен току холостого хода I0. Как и в трансформаторе, этот ток является намагничивающим
45. Мощность P10 при холостом ходе расходуется на потери внутри машины: -механические потери ∆Pмех, -магнитные потери в стали
46. Увеличение момента M2 сопровождается увеличением тока ротора I2, что связано с увеличением ЭДС E2S вследствие снижения частоты
47. Пуск в ход АД n=0 В момент пуска ротор неподвижен и в роторе индуктируется большая ЭДС, следовательно, протекает большой
U1 сE nФ I 1 z 148. При пуске должны удовлетворяться требования: - пуск должен быть простым; - пусковой момент должен быть достаточно большим; -
49. Практически используют следующие способы пуска: 1. Включение обмотки статора в сеть (прямой пуск); 2. Понижение напряжения,
50. Применяют для пуска АД с короткозамкнутым ротором. Если МП < МС, то двигатель разогнаться не сможет. Недостаток прямого пуска-
1. Прямой пуск51. Для АД с короткозамкнутым ротором мощностью 0,6–100 кВт: kп = Mп/Mн = 1,0...2,0; 100–1000 кВт: kп = 0,7...1,0.
Пусковой моментMп
3 U1 r2
2
1 r1 r2 x1 x2
2
2
.
52. Пуск при пониженном напряжении. Для АД с КЗР большой мощности. Понижение напряжения выполняют путем переключения обмотки
53. Пуск при пониженном напряжении. Для АД с КЗР
с помощьюс помощью автотрансформатора
реактора
(снижение момента (дороже)
в квадрате)
54.
~U1Y
Пуск
П
Δ
Работа
С2
С4
С1
С5
С6
С3
55. При включении обмотки статора по схеме Y линейные токи уменьшаются в 3 раза по сравнению с пуском по схеме ∆. По окончанию
56. Механические характеристики при включении обмотки статора АД по схемам Y и ∆
57. Недостаток: пусковой и вращающий моменты двигателя, пропорциональные квадрату напряжения сети, уменьшаются в 3 раза.
58. Пуск с помощью реостата в цепи ротора. Применяют только для пуска АД с фазным ротором. Пусковой реостат имеет три – шесть
59.
б)a)
Mc
n2
Р 1
~U1
2
3
4
K
n1
П
0
K1
M
M п мин
Mп макс
K1
rдоб1
в)
K2
n2 , I1
K2
rдоб2
K3
I1
I1 макс
rдоб3
I1 мин
K3
n2
0
t
60. Включение сопротивления уменьшает пусковой ток двигателя
I 2 U 1r r r x
2
1
2
пуск
x
1
2
2
61. Увеличение Mп за счет включения пускового реостата в цепь ротора при пуске двигателя может быть объяснено рисунком
M = см m I 2 cos 2U1
При пуске
уменьшается ток
статора и угол ψ2,
ψ 2
I 2
ψ2
что приводит к
росту момента M.
62. Недостаток пуска АД с фазным ротором – сложность. Кроме того, АД с ФР имеют худшие рабочие характеристики, чем АД с КЗР (кривые
63. Недостаток пуска АД с фазным ротором – сложность. Кроме того, АД с ФР имеют худшие рабочие характеристики, чем АД с КЗР (кривые
64. Из формулы следует, что частоту вращения можно регулировать изменяя : 1.- частоту f1 напряжения, 2.- число пар полюсов p; 3.-
Регулирование частотывращения АД
60 f1
1 s
n2
p
65. В качестве источника изменения частоты применяются полупроводниковые преобразователи частоты
Частотное регулирование~U1
ПЧ
66.
Область применения: насосы,лифты , компрессоры,
экструдеры, вентиляторы,
станки
67.
68. 1-2,5 кВт 180-200 $
69. изменением частоты f1 питающего напряжения!!!
70.
71.
72. Структурная схема частотных преобразователей со звеном постоянного тока компаний Omron и Yaskawa
73.
Широтно-импульсная модуляция74.
75.
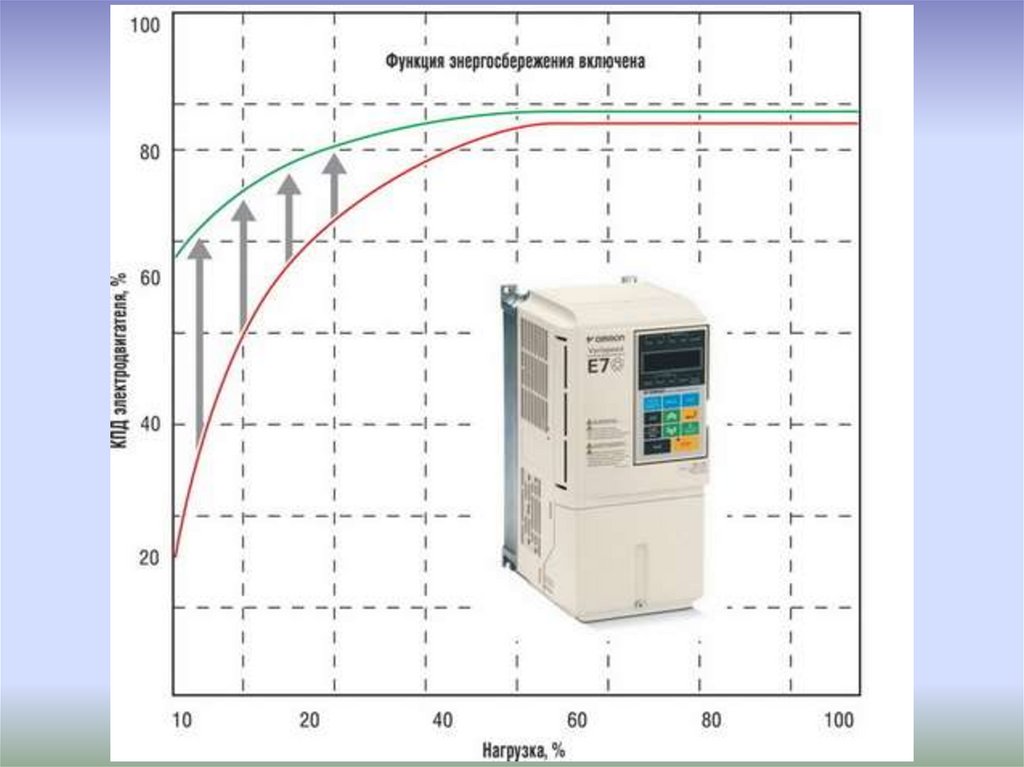
Надежность частотныхпреобразователей Omron
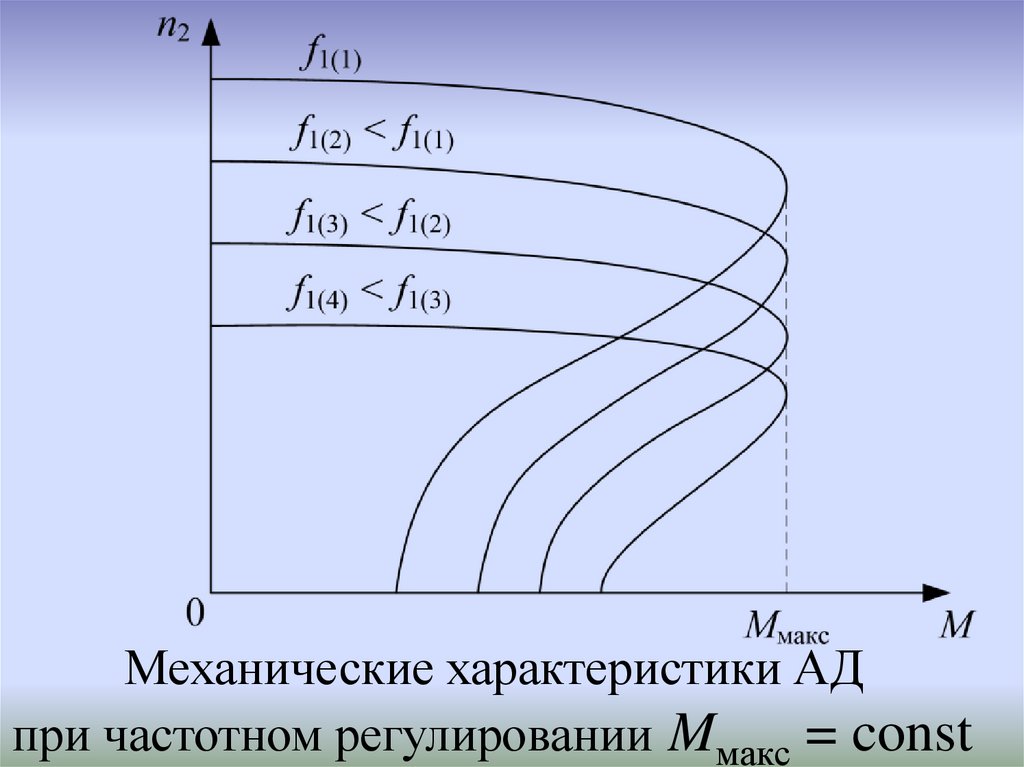
76. При частотном регулировании одновременно с изменением частоты f1 приходится изменять и подводимое напряжение U1
21
макс
1
2
1
Для неизменного максимального момента
M
U
k
f
U 1(1) f1(1) U 1(2) f1(2) сonst
77. При этом основной магнитный поток машины при различных значениях частоты f1 остается неизменным
U11
m
сonst.
4, 44 w1 k01 f1
78.
Механические характеристики АДпри частотном регулировании Mмакс = const
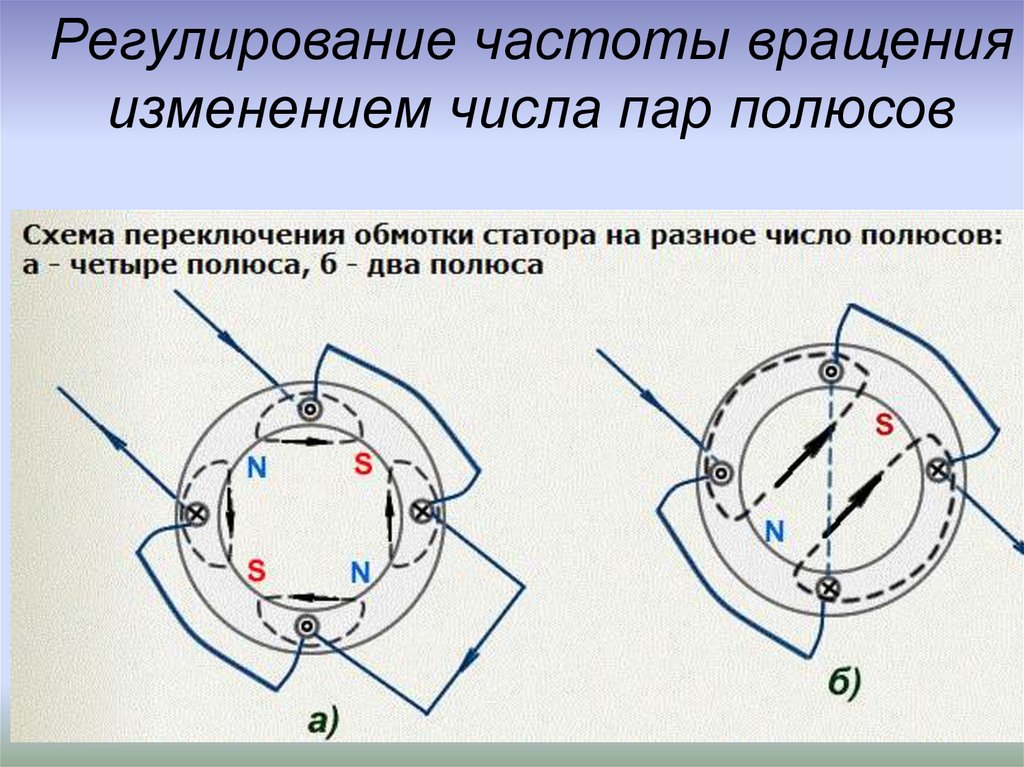
79. 2) переключением числа пар полюсов p
80. Многоскоростные АД применяют для электропривода станков и лифтовых асинхронных двигателей.
81. Асинхронные двигатели с переключением числа пар полюсов называют многоскоростными. Они выпускаются на две, три и четыре частоты
82. Из всех способов регулирования способ переключения числа пар полюсов наиболее экономичный, хотя и он имеет недостатки: –большие
83.
Регулирование частоты вращенияизменением числа пар полюсов
84. Механические характеристики АД при частотном регулировании
n2f1(1)
f1(2) < f1(1)
f1(3) < f1(2)
f1(4) < f1(3)
0
Mмакс
M
85. Мех. характеристики двухскоростного двигателя с переключением числа пар полюсов в отношении 2:1
а)б)
n2
0
n2
p
p
2p
2p
M
0
M
86. Данный способ регулирования частоты вращения применяется только для АД с короткозамкнутым ротором.
87. Регулирование частоты вращения АД путем включения в цепь ротора добавочного активного сопротивления. Применяется только в АД с
88. Регулировочный реостат должен быть рассчитан на длительный режим работы.
n2rдоб=0
rдоб1
rдоб2>rдоб1
rдоб3>rдоб2
0
Mс
M
89. Недостатком этого способа являются большие потери энергии в добавочных сопротивлениях. На практике данный способ применяется
90. Используются в вентиляторах, компрессоров холодильников, приводов барабанов стиральных машин, и другой бытовой техники ,
Однофазные АД91. Однофазные АД
92. Используются в вентиляторах, компрессоров холодильников, приводов барабанов стиральных машин, и другой бытовой техники ,
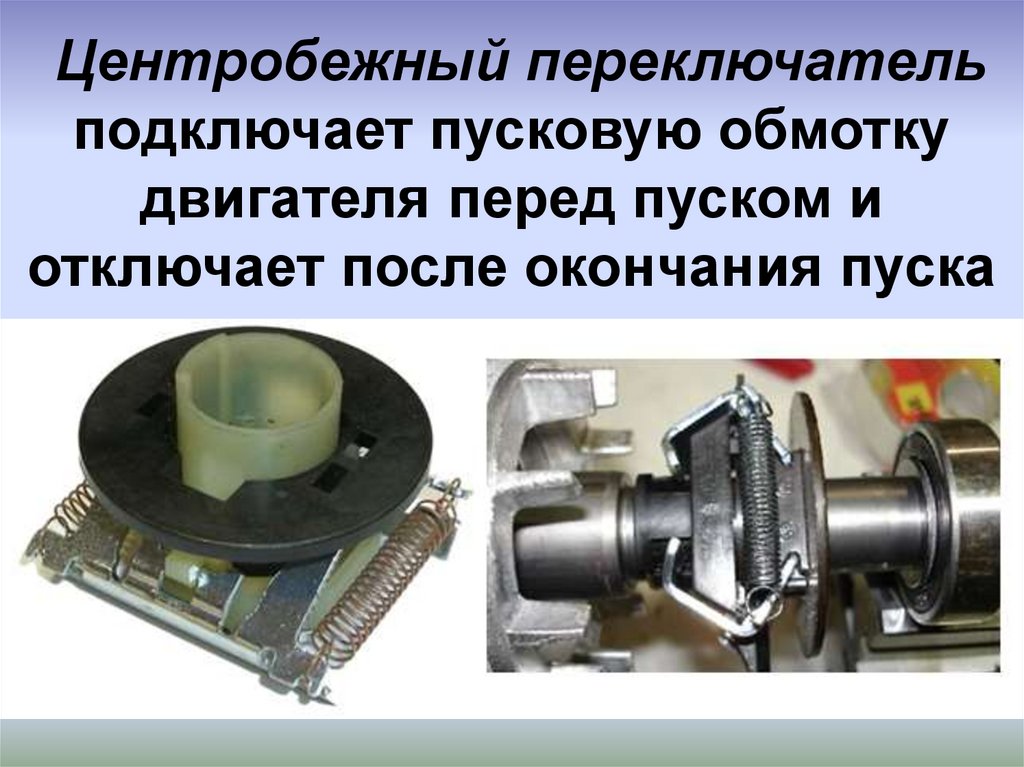
Однофазные АД93.
94.
Центробежный переключательподключает пусковую обмотку
двигателя перед пуском и
отключает после окончания пуска
95. В однофазном АД обмотка статора создает неподвижный поток, изменяющийся во времени, а не круговой вращающийся, как в трехфазных
96. Неподвижный пульсирующий магнитный поток представляется суммой двух круговых вращающихся полей, имеющих одинаковые частоты
Bx 0,5 Bm sin(ωt π x / τ)0,5 Bm sin(ωt π x / τ),
97. Разложение пульсирующего поля на два вращающихся
Фn1
Ф1
Ф2
Ф
n1 n1
Ф1
n1
n1
n1
Ф=0
Ф2
Ф1
Ф2
Ф1
n1
Ф2
Ф
n1
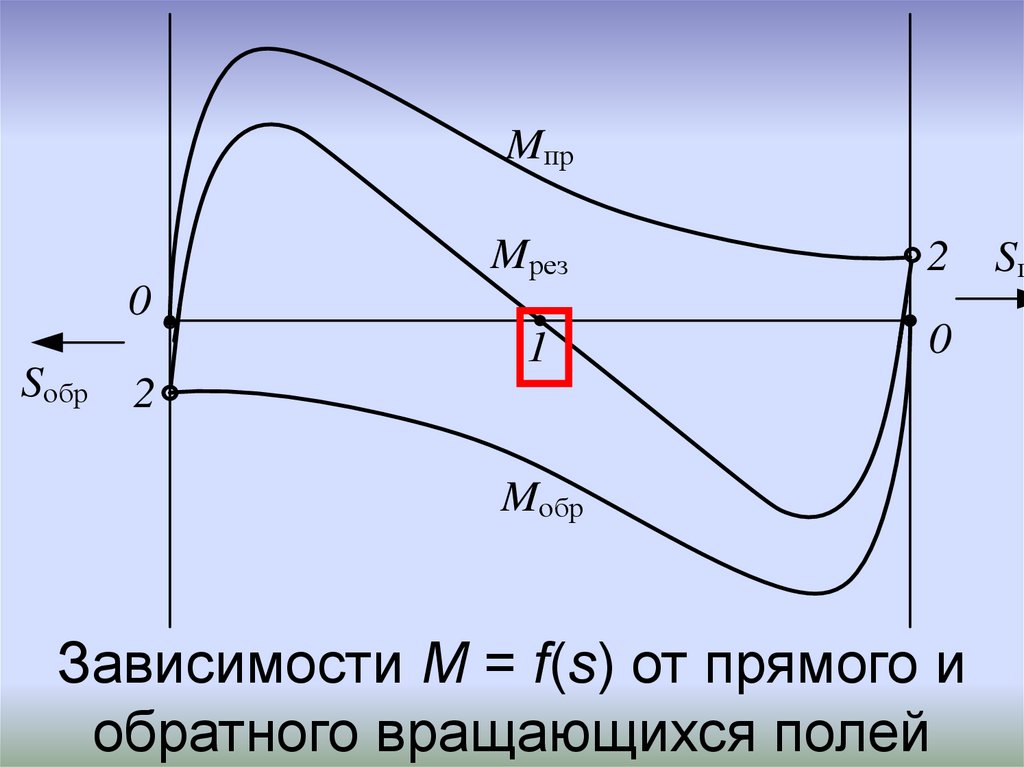
98.
MпрMрез
2
1
0
0
Sобр
2
Mобр
Зависимости М = f(s) от прямого и
обратного вращающихся полей
Sп
99. Моменты Mпр и Mобр направлены в противоположные стороны, а результирующий момент однофазного двигателя Mрез равен разности
MпрMрез
2
1
0
0
Sобр
2
Mобр
Sпр
100. Однофазный АД не имеет пускового момента; он будет вращаться в ту сторону, в которую будет приведен внешней силой; рабочие
101.
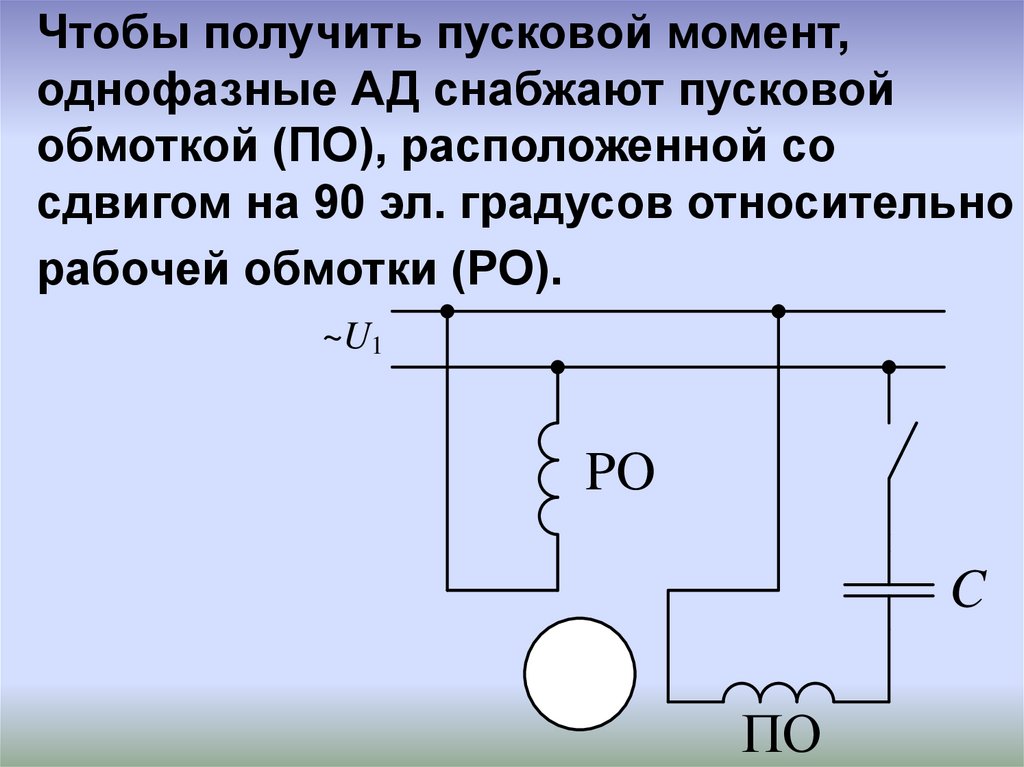
Чтобы получить пусковой момент,однофазные АД снабжают пусковой
обмоткой (ПО), расположенной со
сдвигом на 90 эл. градусов относительно
б)
а)
рабочей обмотки
(РО).
~U1
PO
C
ПО
102.
Пусковой конденсатор103. Поскольку включение второй обмотки существенно улучшает механическую характеристику двигателя, в некоторых случаях применяют
104. Недостатком его является сравнительно большая масса и габариты конденсатора.
~U1A
Cр
B
Cп
105. Ограничения при их применении: - однофазные АД нельзя использовать в режиме холостого хода - при малых нагрузках АД сильно
106. Асинхронная машина в режиме генератора Для самовозбуждения генератора должны выполняться следующие условия: 1 наличие
107. Самовозбуждение асинхронного генератора
НагрузкаU1
U1хх
С
С
С
Eост
АГ
М
0
I с1
Iс2
Iс
Процесс
Схема включения
в генерат. режим самовозбуждения
108. Недостатки асинхр. генератора: – необх. конденсаторные батареи; – проблемы при работе на индуктивную нагрузку; – сложная связь
109. Электромагнитное торможение: 1 Торможение противовключением. Если у АД поменять местами любую пару подходящих к статору из сети
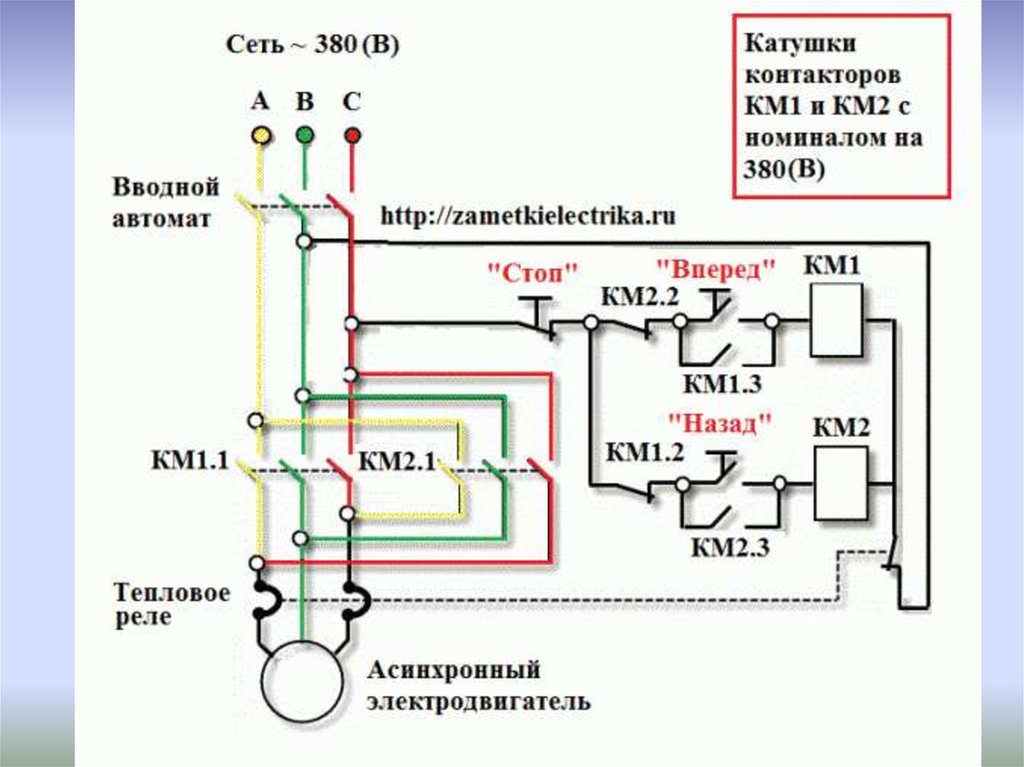
110.
AB
C
FU1...FU3
FU4
FU5
KK
SB1c
SB2.1н
SB3.2в
KM 1в
KM 2.5
KM 1.1 … KM 1.3
KM 1.4
Л1
Л2
С1
С2
Л3
С3
KK2
KK1
M
Л1
Л2
Л3
С1
KM 2.1 …
KM 2.3
С2 С3
SB3.1в
SB2.2н
KM 2н
KM 1.5
KM 2.4
СХЕМА
реверсивного включения асинхронного двигат
с короткозамкнутым ротором принципиальн
монтажная
111. Динамическое торможение реализуется отключением обмотки статора от сети переменного тока и включением на постоянное напряжение
АB
C
+
112. Достоинство - возможность регулировать момент торможения и точно остановить. Применяетсяв подъёмно-транспортных машинах, в
113. Подключение трехфазного АД в режиме однофазного
Схемы включения4800 I1
Cр
,
U1
70-80 %
2800 I1
мощности
Cр
.
U
1
трехфазного АД
40 % мощности
из-за эллиптитрехфазного АД
ческого поля