


















































































































































































































































 electronics
electronicsSimilar presentations:







")


Асинхронные машины
1. Асинхронные машины. Сл. 0
Апухтин А.С.Электрические машины. Асинхронные машины: Конспект
лекций для студентов направления подготовки: 6.050701
“Электротехника и электротехнологии”. Донецк: ДонНТУ, 2011. –
225 с.
Конспект лекций по асинхронным машинам является
частью готовящегося учебного пособия по электрическим
машинам. В разделе рассматриваются теория, принцип
действия, устройство и анализ работы асинхронных машин как
общего, так и специального назначения, получивших
распространение в различных отраслях техники.
Утверждено
на заседании учебно-издательского
совета ДонНТУ (протокол № 5 от 01. 09. 11) № 450 – 13 у. п. л.
2. Трансформаторы. Сл. 01
Литература:1. Брускин Д.Э. и др. Электрические машины. В 2-х ч. Ч.1.: Учебное
пособие для электротехн. спец.
вузов – 2-е изд. – М.: Высш. шк.
1987 – 319с.
2. Брускин Д.Э. и др. Электрические машины. В 2-х ч. Ч.2.: Учебное
пособие для электротехн. спец.
вузов – 2-е изд. – М.: Высш. шк.
1987 – 335с.
3. Копылов И.П. Электрические машины : Учеб. для вузов. – 2-е изд.,
перераб. – М.: Высшая шк.; Логос; 2000. – 607 с.
4. Радин В.М., Брускин Д. Э., Зорохович А.Е. Электрические машины :
Асинхронные машины: Учебное пособие для студ. электромех. спец.
вузов/ Под ред. И.П. Копылова. - М.: Высш шк., 1988. -328 с.
5. Дудник М.З. Електричні машини: в 2-х ч. Навчальний посібник.–
Донецьк: РВА ДонНТУ, 2002.–212 с.
6. Токарев Б.Ф. Электрические машины: Учебное пособие для вузов. М.: Энергоатомиздат, 1990.
7. Читечян В.И. Электрические машины. Сборник задач. 1988 – 231 с.
8. Тихомиров П.М. Расчет трансформаторов: Учеб. Пособие для
вузов. – 5-е изд. - М. Энергоатомиздат. 1986 – 528 с.
9. Апухтін О.С., Мельник А.А. Навчальний посібник з електричних
машин до курсового проекту “Розрахунок трансформатора” (для студ.
електротехн. спец.) – Донецьк, ДонНТУ, 2008 – 194 с.
10. Кацман М.М. Электрические машины. Учеб. для учащихся
электротехн. спец. техникумов. – 2-е изд., перераб. и доп. – М.:Высш.
шк., 1990. – 463 с.
3. РЕЖИМЫ РАБОТЫ АСИНХРОННЫХ МАШИН И ОБЛАСТИ ПРИМЕНЕНИЯ АСИНХРОННЫХ ДВИГАТЕЛЕЙ. Сл. 1
РЕЖИМЫ РАБОТЫ АСИНХРОННЫХ МАШИН И ОБЛАСТИПРИМЕНЕНИЯ АСИНХРОННЫХ ДВИГАТЕЛЕЙ
Асинхронные машины получаются из обобщенной
.рПри
этом
машины, когда
поля статора и ротора неподвижны
с
относительно друг друга, так как частоты токов в роторе и статоре
связаны между собой соотношением
, где f 2и f1 —
s
f1 f 2
соответственно
частоты статора и ротора. При этом
s —
скольжение или относительная угловая скорость (частота
вращения):
s ( c p ) / c .
В асинхронных
(несинхронных) машинах частота
вращения ротора не равна частоте вращения поля в воздушном
зазоре ( р с ). Механическая частота вращения ротора
асинхронных машин в установившемся режиме может быть ниже
и выше синхронной частоты вращения поля, при этом ротор может
вращаться в сторону, противоположную вращению поля.
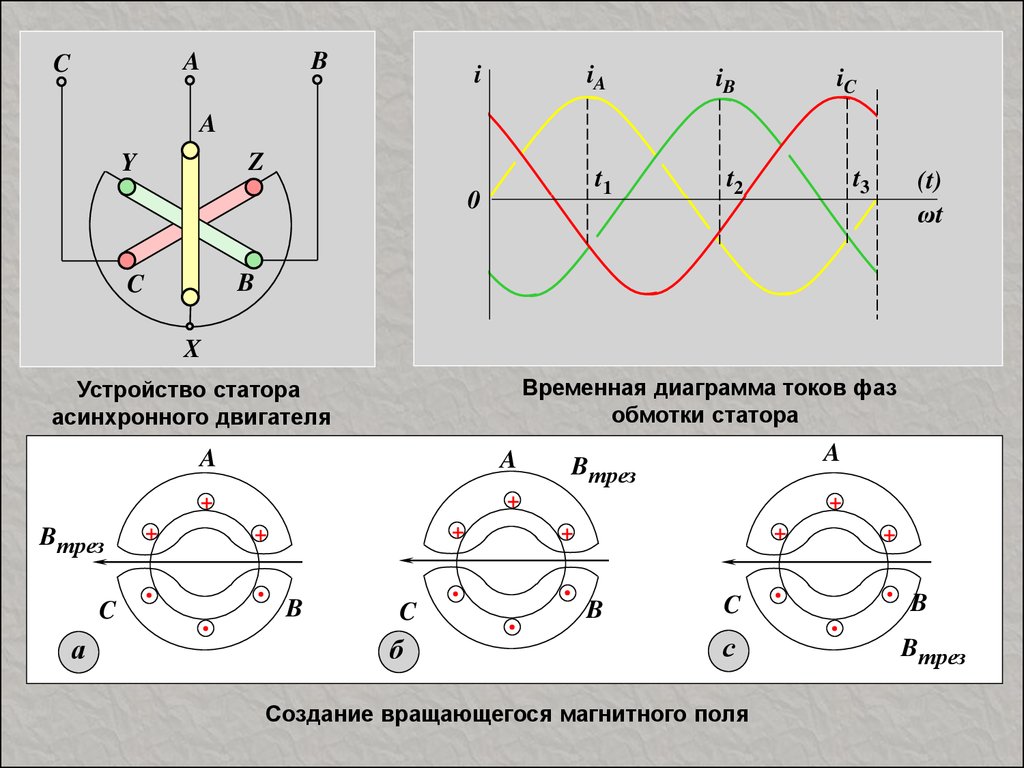
4.
BA
C
iA
i
iB
iC
A
Z
Y
t1
0
t3
t2
(t)
ωt
B
C
X
Временная диаграмма токов фаз
обмотки статора
Устройство статора
асинхронного двигателя
Bтрез
C
а
+
A
A
+
+
+
+
B
C
б
A
Bтрез
+
+
+
B
C
с
Создание вращающегося магнитного поля
+
B
Bтрез
5. РЕЖИМЫ РАБОТЫ АСИНХРОННЫХ МАШИН И ОБЛАСТИ ПРИМЕНЕНИЯ АСИНХРОННЫХ ДВИГАТЕЛЕЙ. Сл. 3
В зависимости от частоты вращения и направлениявращения ротора по отношению к полю различают четыре
режима работы асинхронных машин (рис. 1).
6. РЕЖИМЫ РАБОТЫ АСИНХРОННЫХ МАШИН И ОБЛАСТИ ПРИМЕНЕНИЯ АСИНХРОННЫХ ДВИГАТЕЛЕЙ. Сл. 4
Режимы работы асинхронной машины7. РЕЖИМЫ РАБОТЫ АСИНХРОННЫХ МАШИН И ОБЛАСТИ ПРИМЕНЕНИЯ АСИНХРОННЫХ ДВИГАТЕЛЕЙ. Сл. 5
Когда 0 р с , имеет место двигательный режим, прис р - генераторный режим. В этом режиме ротор
вращается в ту же сторону, что и поле, но с большей частотой. В
тормозном режиме ротор асинхронной машины вращается в
сторону, противоположную вращению поля. Когда асинхронная
машина эксплуатируется при неподвижном роторе ( p 0 ),
имеет место трансформаторный режим работы асинхронной
машины (рис. 1, а).
В теории асинхронных машин широко применяется понятие
скольжения – относительной частоты вращения [см. (1)]. Режимы
работы асинхронной машины в функции скольжения
представлены на рис. 1, б. В двигательном режиме при 0 s 1
асинхронная машина преобразует электрическую энергию в
механическую. В генераторном режиме, когда 0 s , ротор
асинхронной машины вращается в сторону вращения поля с
частотой, большей синхронной. При этом механическая энергия
преобразуется в электрическую. В тормозном режиме
механическая и электрическая энергии преобразуются в тепло.
8. РЕЖИМЫ РАБОТЫ АСИНХРОННЫХ МАШИН И ОБЛАСТИ ПРИМЕНЕНИЯ АСИНХРОННЫХ ДВИГАТЕЛЕЙ. Сл. 6
Этот режим, как правило, может быть кратковременным ииспользуется для быстрого останова. Трансформаторный
режим, когда s = 1, используется для регулирования амплитуды
и фазы напряжения.
Асинхронные машины наибольшее распространение
получили как двигатели. Это основной двигатель, применяемый
в промышленности, сельском хозяйстве и в быту. Только
асинхронных двигателей единых серий мощностью от 0,6 до 400
кВт в нашей стране ежегодно выпускается около 10 млн.
Асинхронных микродвигателей мощностью от 0,6 кВт
изготовляется несколько десятков миллионов в год.
Электротехническая
промышленность
выпускает
асинхронные двигатели в большом диапазоне мощностей.
Предельная мощность асинхронных двигателей – несколько
десятков мегаватт. В индикаторных системах применяются
асинхронные двигатели мощностью от долей ватта до сотен
ватт. Частота вращения двигателей общего назначения – от
3000 до 500 об/мин.
9. РЕЖИМЫ РАБОТЫ АСИНХРОННЫХ МАШИН И ОБЛАСТИ ПРИМЕНЕНИЯ АСИНХРОННЫХ ДВИГАТЕЛЕЙ. Сл. 7
В генераторном режиме асинхронные машины применяютсяредко. Для создания поля в зазоре асинхронной машины
необходима реактивная мощность, которая забирается из сети
или от других источников реактивной мощности. Асинхронные
двигатели не могут работать с cos 1. Это
существенный
недостаток асинхронных машин, ограничивающий их применение
в генераторном режиме.
При электромеханическом преобразовании энергии в
асинхронных машинах, как и в других машинах, происходит
преобразование энергии в тепло. Электрические потери в роторе
асинхронной машины пропорциональны скольжению:
Pэл 2 Pэм s,
(2)
где Pэм – электромагнитная мощность – мощность в воздушном
зазоре машины.
10. РЕЖИМЫ РАБОТЫ АСИНХРОННЫХ МАШИН И ОБЛАСТИ ПРИМЕНЕНИЯ АСИНХРОННЫХ ДВИГАТЕЛЕЙ. Сл. 8
Чтобыбольшая
часть
электрической
энергии
преобразовывалась в механическую, асинхронные машины
используются в электроприводах, где допустимо небольшое
скольжение ( s 1 4%). При глубоком скольжении ( s 10 50%)
асинхронные машины используются редко, так как в этом случае
большая часть мощности, забираемой из сети, преобразуется в
тепло, что приводит к низкому КПД и увеличению габаритов
асинхронной машины из-за трудностей, связанных с отводом
тепла от активных частей машины.
Наличие в роторе потерь, пропорционально зависящих от
скольжения, – одна из особенностей асинхронных машин,
обусловливающих их отличие от других типов электрических
машин.
Если обмотки ротора представляют собой замкнутые
контуры, то при скольжении s 1 вся мощность, поступающая
на ротор, преобразуется в тепло. При скольжении s 0 мощность
на ротор не поступает. При скольжениях, отличных от 0 и 1,
электромагнитная мощность преобразуется в двигательном
режиме в механическую мощность и в тепло, а в генераторном
режиме – в электрическую и в тепло.
В конструктивном исполнении асинхронные двигатели –
наиболее простые, они получили наибольшее распространение.
11. РЕЖИМЫ РАБОТЫ АСИНХРОННЫХ МАШИН И ОБЛАСТИ ПРИМЕНЕНИЯ АСИНХРОННЫХ ДВИГАТЕЛЕЙ. Сл. 9
КОНСТРУКЦИИ АСИНХРОННЫХ МАШИНМожно без преувеличения сказать, что промышленное
производство приводится в движение асинхронными двигателями.
В настоящее время асинхронные двигатели выпускаются едиными
сериями в огромных количествах. Основная серия асинхронных
машин 4А включает в себя двигатели от 0,4 до 400 кВт.
Выпускаются высоковольтные машины в виде единой серии А4 на
мощности свыше 400 кВт. Разработана единая серия
асинхронных машин АИ.
Конструкции асинхронных машин делятся на два основных
типа: с короткозамкнутым ротором и фазным ротором.
Наибольшее
распространение
получили
двигатели
с
короткозамкнутым ротором, которые в серии 4А выполняются на
все мощности, включая 400 кВт.
Обмотки короткозамкнутых роторов выполняются литыми из
алюминия или его сплавов. При заливке одновременно
отливаются стержни, лежащие в пазах, и короткозамыкающие
кольца с размещенными на их торцах вентиляционными
лопатками и штырями для крепления балансировочных грузиков
(см. рис. 2).
12. РЕЖИМЫ РАБОТЫ АСИНХРОННЫХ МАШИН И ОБЛАСТИ ПРИМЕНЕНИЯ АСИНХРОННЫХ ДВИГАТЕЛЕЙ. Сл. 10
Короткозамкнутые роторы крупных машин и специальныхасинхронных
машин
с
улучшенными
пусковыми
характеристиками выполняются сварными. Стержни ротора из
меди или латуни привариваются к короткозамыкающим кольцам,
имеющим отверстия, куда перед сваркой вставляются стержни
обмотки.
Рис 2. Асинхронный двигатель
4А250 (степень защиты 1Р44)
Рис. 3. Асинхронный двигатель
4АН250 (степень защиты 1Р23)
13. РЕЖИМЫ РАБОТЫ АСИНХРОННЫХ МАШИН И ОБЛАСТИ ПРИМЕНЕНИЯ АСИНХРОННЫХ ДВИГАТЕЛЕЙ. Сл. 11
Устройство трехфазного асинхронного двигателя скороткозамкнутым ротором:
1 – вал; 2, 6 – подшипники; 3, 7 - подшипниковые щиты; 4 – коробка выводов; 5 –
вентилятор; 8 – кожух вентилятора; 9 – сердечник ротора с короткозамкнутой
обмоткой; 10 – сердечник статора; 11 – корпус; 12 - лапы
14. РЕЖИМЫ РАБОТЫ АСИНХРОННЫХ МАШИН И ОБЛАСТИ ПРИМЕНЕНИЯ АСИНХРОННЫХ ДВИГАТЕЛЕЙ. Сл. 12
Короткозамкнутый ротор:а – обмотка «беличья клетка»; б – ротор с обмоткой, выполненной
методом литья под давлением; 1 – вал 2 – короткозамыкающие
кольца; 3 вентиляционные лопатки
15. РЕЖИМЫ РАБОТЫ АСИНХРОННЫХ МАШИН И ОБЛАСТИ ПРИМЕНЕНИЯ АСИНХРОННЫХ ДВИГАТЕЛЕЙ. Сл. 13
Расположение выводов обмотки статора (а) и положениеперемычек при соединении обмотки статора звездой и
треугольником (б)
16. РЕЖИМЫ РАБОТЫ АСИНХРОННЫХ МАШИН И ОБЛАСТИ ПРИМЕНЕНИЯ АСИНХРОННЫХ ДВИГАТЕЛЕЙ. Сл. 14
Асинхронные машины с фазным ротором имеют на ротореобмотку из круглых или прямоугольных проводов, которая
выполняется так же, как и обмотка статора.
Асинхронные двигатели с короткозамкнутым ротором серии
4А можно разделить на две разновидности по степени защиты и
способу охлаждения. Машины закрытые, защищенные от
попадания внутрь ее брызг любого направления и предметов
диаметром более 1 мм, имеют внешний обдув вентилятором
(рис. 2). По стандарту это исполнение имеет обозначение 1Р44.
Второй разновидностью конструкции являются машины с
исполнением по степени защиты 1Р23 (рис. 3). В этих машинах
обеспечивается защита от возможности соприкосновения
пальцев рук и твердых предметов диаметром более 12,5 мм с
токоведущими вращающимися частями машины. Исполнение
1Р23 предусматривает защиту от попадания внутрь машины
капель, падающих под углом 60° к вертикали. Иногда такое
исполнение называют каплезащищенным.
17. РЕЖИМЫ РАБОТЫ АСИНХРОННЫХ МАШИН И ОБЛАСТИ ПРИМЕНЕНИЯ АСИНХРОННЫХ ДВИГАТЕЛЕЙ. Сл. 15
Наружный обдув в закрытых двигателях осуществляетсявентилятором 1 (рис. 2), окруженным кожухом 2.
Для улучшения теплоотдачи станина 3 двигателя имеет
продольные радиальные ребра. Вентиляционные лопатки
ротора 4 перемешивают воздух внутри машины, отводя тепло от
более нагретых лобовых частей обмотки.
В двигателях защищенного исполнения со степенью
защиты
IР23
применена
двусторонняя
симметричная
радиальная система вентиляции (рис. 3). Воздух попадает в
машину через отверстия в щитах, а выходит через отверстия в
станине. Напор воздуха внутри машины создается лопатками /,
отлитыми вместе с короткозамкнутой обмоткой ротора, а
диффузоры 2, укрепленные на подшипниковых щитах 3,
направляют поток воздуха.
В двигателях с фазным ротором обмотка ротора
выполняется всыпной из круглого провода или стержневой из
меди прямоугольного сечения. Общий вид двигателя с фазным
ротором представлен на рис. 4.
18. РЕЖИМЫ РАБОТЫ АСИНХРОННЫХ МАШИН И ОБЛАСТИ ПРИМЕНЕНИЯ АСИНХРОННЫХ ДВИГАТЕЛЕЙ. Сл. 16
Рис. 4. Двигатель с фазным ротором 4АНК200 (степень защиты1Р23)
19. РЕЖИМЫ РАБОТЫ АСИНХРОННЫХ МАШИН И ОБЛАСТИ ПРИМЕНЕНИЯ АСИНХРОННЫХ ДВИГАТЕЛЕЙ. Сл. 17
Устройство трехфазного асинхронного двигателя с фазным ротором:1, 7 – подшипники; 2, 6 – подшипниковые щиты; 3 – корпус; 4 – сердечник
статора с обмоткой; 5 сердечник ротора; 8 – вал; 9 – коробка выводов;
10 – лапы; 11 – контактные кольца
20. РЕЖИМЫ РАБОТЫ АСИНХРОННЫХ МАШИН И ОБЛАСТИ ПРИМЕНЕНИЯ АСИНХРОННЫХ ДВИГАТЕЛЕЙ. Сл. 18
Принципиальные схемы включения асинхронных двигателейс короткозамкнутым (а) и фазным (б) ротором
21. РЕЖИМЫ РАБОТЫ АСИНХРОННЫХ МАШИН И ОБЛАСТИ ПРИМЕНЕНИЯ АСИНХРОННЫХ ДВИГАТЕЛЕЙ. Сл. 19
Отличительной особенностью машин с фазным роторомявляется наличие на роторе обмотки из проводников круглого
или прямоугольного сечения, начала которой выведены на
контактные кольца. Узел контактных колец вынесен из станины,
а контактные кольца закрыты кожухом (рис. 4). Узел контактных
колец – консольного типа. Контактные кольца, опрессованные
пластмассой, насаживаются на вал двигателя, они выполняются
чугунными или медными. Выводные концы обмотки ротора
подходят к трем кольцам через внутреннее отверстие в вале
ротора. Обмотка ротора соединяется в звезду.
Токосъемный
аппарат
состоит
из
щеток
и
щеткодержателей.
Щеткодержатели
укреплены
на
изолированной части пальца, металлический конец которого
ввинчен в прилив подшипникового щита.
Система вентиляции и степень защиты двигателей с
фазным ротором — 1Р23 и 1Р44.
При
изготовлении
серий
электрических
машин
предусматривается
максимальная
унификация,
поэтому
большинство деталей одинаковые для машин как с
короткозамкнутым, так и с фазным ротором.
22. РЕЖИМЫ РАБОТЫ АСИНХРОННЫХ МАШИН И ОБЛАСТИ ПРИМЕНЕНИЯ АСИНХРОННЫХ ДВИГАТЕЛЕЙ. Сл. 20
Статор асинхронной машины с короткозамкнутым или сфазным ротором состоит из магнитопровода с обмоткой и
станины. Магнитопровод статора набирается из листов
электротехнической стали, изолированных друг от друга и
имеющих на внутренней поверхности пазы (рис. 2 – 4).
Сердечник статора состоит из отдельных пакетов, которые
после сборки скрепляют скобами и укрепляют в станине. При
сборке пакетов магнитопровода статора может быть выполнен
скос пазов. Форма пазов и число пазов на статоре зависят от
мощности и частоты вращения.
В производстве асинхронных двигателей используются
горячекатаные и холоднокатаные стали толщиной 0,35 и 0,5 мм.
Горячекатаные стали не имеют магнитной анизотропии, а
холоднокатаные
имеют
значительную
анизотропию.
Горячекатаная сталь марки 1211 при напряженности магнитного
поля Н = 2500 А/м имеют индукцию 1,53 Тл, а удельные потери
Р1,0/50 = 3,3 Вт/кг.
23. РЕЖИМЫ РАБОТЫ АСИНХРОННЫХ МАШИН И ОБЛАСТИ ПРИМЕНЕНИЯ АСИНХРОННЫХ ДВИГАТЕЛЕЙ. Сл. 21
Для асинхронных двигателей серии 4А с высотой осивращения до 160 мм применяется холоднокатаная рулонная
сталь марки 2013 с В2500 = 1,65 Тл и Р1,0/50 = 2,5 Вт/кг. Для
двигателей с высотой оси вращения свыше 160 мм
используется холоднокатаная рулонная сталь марки 2212 с
В2500 =1,6 ТЛ и Р1,0/50 =2,2 Вт/кг.
Обычно из одного рулона штампуются листы как статора,
так и ротора. Так как частота перемагничивания ротора
небольшая и равна 1 – 2 Гц, листы ротора не изолируются друг
от друга.
Станины двигателей изготовляются из алюминиевого
сплава АЛ-2, для двигателей большой мощности — из чугуна.
Станины выполняются с прилитыми лапами, с продольными
приливами для крепления подшипниковых щитов. Станины
имеют поперечные ребра для улучшения охлаждения и
усиления механической прочности.
24. РЕЖИМЫ РАБОТЫ АСИНХРОННЫХ МАШИН И ОБЛАСТИ ПРИМЕНЕНИЯ АСИНХРОННЫХ ДВИГАТЕЛЕЙ. Сл. 22
Подшипниковые щиты выполняются из сплава АЛ-2.Отверстие под подшипник армировано стальной втулкой. Щиты
двигателей большой мощности выполняются из чугуна. Для
упрочнения конструкции щиты имеют ребра. В двигателях серии
4А одна подшипниковая опора со стороны вала плавающая, а
вторая — фиксирующая. Подшипник, устанавливаемый в
фиксирующей опоре, воспринимает радиальную и осевую
нагрузки.
Подшипник
в
плавающей
опоре
свободно
перемещается в аксиальном направлении, предотвращая
заклинивание при отклонении от предельных размеров и
тепловых расширениях. Подшипниковый узел состоит из
подшипников, подшипниковых крышек и элементов уплотнения.
Подшипниковые узлы выполняются с устройством для
пополнения смазки, а также с подшипниками, имеющими
двустороннее уплотнение и постоянно заложенную смазку,
рассчитанную на весь срок службы.
Валы двигателей единой серии 4А унифицированы. Длину
и диаметр выступающего конца вала выбирают в зависимости
от высоты оси вращения.
При конструировании асинхронных двигателей единых
серий обеспечивается максимальная унификация узлов и
отдельных деталей.
25. РЕЖИМЫ РАБОТЫ АСИНХРОННЫХ МАШИН И ОБЛАСТИ ПРИМЕНЕНИЯ АСИНХРОННЫХ ДВИГАТЕЛЕЙ. Сл. 23
Кроме асинхронных двигателей единой серии 4Апромышленностью выпускаются двигатели серий А2 и А02. Они
выпускались как основные двигатели до 1975 г., когда были
заменены новой серией. Асинхронные машины серий А2 и А02
имеют больший расход материалов и другие установочные
размеры. Конструктивное выполнение таких машин показано на
рис. 5.
Рис. 5. Обдуваемый асинхронный двигатель А02 9-го габарита
26. РЕЖИМЫ РАБОТЫ АСИНХРОННЫХ МАШИН И ОБЛАСТИ ПРИМЕНЕНИЯ АСИНХРОННЫХ ДВИГАТЕЛЕЙ. Сл. 24
Электротехническойпромышленностью
выпускаются
высоковольтные асинхронные двигатели серий А, АК 12—13-го
габаритов и их модификации на мощность свыше 100 кВт на
напряжение 6000 В. Такие двигатели выпускаются с
короткозамкнутым и фазным ротором. В двигателях с
короткозамкнутым ротором применяется сварная клетка.
Обмотки статора имеют изоляцию типа «монолит-2». Изоляция
соответствует классу нагревостойкости F.
Для насосов и аэродинамических труб выпускаются
асинхронные двигатели мощностью до 20 МВт. Одной из
распространенных серий мощных асинхронных двигателей
является серия АТД. Двигатели АТД выполняются с
короткозамкнутым массивным ротором и водяным охлаждением
обмотки статора.
Конструкции асинхронных микродвигателей отличаются от
конструкций двигателей общего назначения. Это связано с
особыми требованиями работы в системах автоматического
управления, применением в бытовых приборах с однофазным
питанием и функциональным использованием (тахогенераторы,
датчики и другие устройства).
27. РЕЖИМЫ РАБОТЫ АСИНХРОННЫХ МАШИН И ОБЛАСТИ ПРИМЕНЕНИЯ АСИНХРОННЫХ ДВИГАТЕЛЕЙ. Сл. 25
СЕРИИ АСИНХРОННЫХ ДВИГАТЕЛЕЙАсинхронные двигатели выпускаются в виде единых серий,
которые практически обеспечивают все основные потребности
при комплектовании электроприводов для всех отраслей
народного хозяйства. Асинхронные двигатели являются
основными двигателями для большинства электроприводов. Они
потребляют около половины вырабатываемой электроэнергии.
При этом наибольшее количество электроэнергии потребляют
двигатели мощностью до 10 кВт. Поэтому технико-экономические
показатели двигателей единой серии 4А, которая охватывает этот
диапазон мощностей, имеют важное значение для экономики
страны.
Единая серия асинхронных двигателей 4А, которая
выпускается с 1973 г., включает двигатели мощностью от 0,06 до
400 кВт. Двигатели мощностью от 0,06 до 0,37 кВт выполняются
на напряжение 220/380 В, мощностью от 0,55 до 110 кВт—на
напряжение 220/380 и 380/660 В, мощностью от 132 до 400 кВт
на напряжение 380/660 В. Количество выводных концов шесть,
соединение / Y .
28. РЕЖИМЫ РАБОТЫ АСИНХРОННЫХ МАШИН И ОБЛАСТИ ПРИМЕНЕНИЯ АСИНХРОННЫХ ДВИГАТЕЛЕЙ. Сл. 26
Помимо основного исполнения в серии 4А имеется целыйряд специализированных исполнений: тропическое, химическое,
на частоту 60 Гц, сельскохозяйственное, текстильное и др.
Выпускают двигатели с повышенным пусковым моментом,
повышенным скольжением, малошумные, многоскоростные и
встраиваемые.
Выпускаются
двигатели
специализированные
по
конструкции: со встроенными электромагнитным тормозом,
температурной защитой, встраиваемые, с повышенной
точностью
по
установочным
размерам,
малошумные,
высокоточные.
В основном исполнении двигатели выполняются с
короткозамкнутым ротором и предназначаются для применения
в условиях умеренного климата. Двигатели изготовляются
защищенными (1Р23) и закрытыми обдуваемыми (1Р44).
Обозначение типов двигателей расшифровывается следующим
образом:
29. РЕЖИМЫ РАБОТЫ АСИНХРОННЫХ МАШИН И ОБЛАСТИ ПРИМЕНЕНИЯ АСИНХРОННЫХ ДВИГАТЕЛЕЙ. Сл. 27
4 — порядковый номер серии; А — асинхронный; Н —исполнение по способу защиты от окружающей среды (Н защищенное, отсутствие буквы — закрытое обдуваемое);
следующая буква — обозначение исполнения ротора (К —
ротор фазный, отсутствие буквы — ротор короткозамкнутый);
затем—исполнение двигателя по материалу станины и щитов
(А—станина и щиты алюминиевые, отсутствие буквы — станина
и щиты чугунные). Далее указывается высота центров, за ней
установочный размер, число полюсов и климатическое
исполнение и категория размещения.
Например, 4АА63А6УЗ — асинхронный двигатель серии
4А, закрытое обдуваемое исполнение со станиной и щитами из
алюминия, с высотой оси вращения 63 мм, магнитопровод
первой длины, шестиполюсный, для районов умеренного
климата, третьей категории размещения.
Всего в серии 4А свыше сотни типоразмеров двигателей.
30. РЕЖИМЫ РАБОТЫ АСИНХРОННЫХ МАШИН И ОБЛАСТИ ПРИМЕНЕНИЯ АСИНХРОННЫХ ДВИГАТЕЛЕЙ. Сл. 28
Для привода бытовых приборов (звукозаписывающаяаппаратура, перемотка ленты, контрольно-кассовые аппараты,
центрифуга,
фреоновый
компрессор)
применяются
асинхронные конденсаторные двигатели серии КД. Эти
двигатели
выпускаются на напряжение 220 В, f=50 Гц,
мощности от 2,5 до 50 Вт, КПД=0,15-0,6, соsφ=0,87—0,95, масса
0,75—2,4 кг (рис. 6). Широко применяются двигатели общего
назначения серий АОЛ, АВЕ. Серия АОЛ выпускается на
мощности 30—400 Вт, АВЕ— на мощности 18—400 Вт.
Двигателя с повышенным активным сопротивлением в
пусковой обмотке (рис. 6) используются в приводе герметичного
компрессора
бытовых
холодильников.
Эти
двигатели
предназначены для работы в среде хладона-12 и фреона-22 и
рефрижераторного масла. Эти двигатели выпускаются на
мощности от 60 до 150 Вт на 300 и 1500 об/мин, КПД=0,5—0,7,
cosφ = 0,56—0,62. Расход активных материалов 0,027—0,057
кг/Вт.
31. РЕЖИМЫ РАБОТЫ АСИНХРОННЫХ МАШИН И ОБЛАСТИ ПРИМЕНЕНИЯ АСИНХРОННЫХ ДВИГАТЕЛЕЙ. Сл. 29
Рис. 6. Конденсаторный двигательУниверсальные асинхронные
двигатели серии УАД —
трехфазные асинхронные двигатели с распределенной обмоткой
на статоре. Они могут работать при включении в трехфазную
сеть 220 В при соединении обмоток статора в звезду и от
однофазной сети 220 В при включении рабочего конденсатора в
свободную фазу сети.
32. РЕЖИМЫ РАБОТЫ АСИНХРОННЫХ МАШИН И ОБЛАСТИ ПРИМЕНЕНИЯ АСИНХРОННЫХ ДВИГАТЕЛЕЙ. Сл. 30
Двигатели серии УАД имеют мощность от 1 до 70 Вт принапряжении 220 В и синхронной частоте вращения 1500 и 3000
об/мин.
Это
двигатели
закрытого
исполнения.
Они
предназначены для работы при температуре от -60 до +85°С.
Уровень звука на расстоянии 1 м от корпуса 45—70 дБ.
Двигатели серии имеют семь типоразмеров, выполненных на
четырех диаметрах статора.
На частоту 400 Гц выпускаются асинхронные двигатели
серии ДАТ. Серия включает двигатели на мощности от 10 до
10 000 Вт, напряжение 220 В и частоты вращения 10 800, 7500 и
5600 об/мин. Масса двигателей 0,15 - 12,5 кг. Режим работы
двигателей продолжительный, температура окружающей среды
от 60 до 100°С при пониженном атмосферном давлении.
В настоящее время разработана единая унифицированная
серия бытовых электродвигателей мощностью 0,6—180 Вт. В
серии
предусматривается
прогрессивная
технология,
позволяющая
автоматизировать
большинство трудоемких
процессов изготовления машин.
33. РЕЖИМЫ РАБОТЫ АСИНХРОННЫХ МАШИН И ОБЛАСТИ ПРИМЕНЕНИЯ АСИНХРОННЫХ ДВИГАТЕЛЕЙ. Сл. 31
На изготовление асинхронных двигателей идет наибольшееколичество электротехнической стали и обмоточных проводов.
Оптимальное проектирование и рациональная эксплуатация
асинхронных двигателей имеет важное значение для народного
хозяйства.
Высота оси вращения
На корпусе асинхронного двигателя прикреплена табличка,
на которой указаны тип двигателя, завод-изготовитель, год
выпуска и номинальные данные (полезная мощность,
напряжение, ток, коэффициент мощности, частота вращения и
КПД).
34. РЕЖИМЫ РАБОТЫ АСИНХРОННЫХ МАШИН И ОБЛАСТИ ПРИМЕНЕНИЯ АСИНХРОННЫХ ДВИГАТЕЛЕЙ. Сл. 32
Асинхронные двигатели серии 4А:а – закрытого обдуваемого исполнения; б – защищенного
исполнения
35. РЕЖИМЫ РАБОТЫ АСИНХРОННЫХ МАШИН И ОБЛАСТИ ПРИМЕНЕНИЯ АСИНХРОННЫХ ДВИГАТЕЛЕЙ. Сл. 33
Внешний вид (а) и устройство (б) высоковольтного асинхронногодвигателя серии АН2
36. РЕЖИМЫ РАБОТЫ АСИНХРОННЫХ МАШИН И ОБЛАСТИ ПРИМЕНЕНИЯ АСИНХРОННЫХ ДВИГАТЕЛЕЙ. Сл. 34
Устройство трехфазного металлургического асинхронногодвигателя серии МТН с фазным ротором
37. ОСНОВЫ ТЕОРИИ АСИНХРОННЫХ МАШИН. Сл. 35
ОСНОВЫ ТЕОРИИ АСИНХРОННЫХ МАШИНРабота асинхронного двигателя
при неподвижном роторе
а) Холостой ход АД ( I 2 0 ) :
e
(
f
)
2
1
u
o Ф
o
o F
1 i
(
f
)
e
1
1
e
Ф
(
f
)
1
1
i
R
1
1
o
E1 4 ,44 f 1 W1 K об 1 Фm ;
E2 4 ,44 f 1 W2 K об 2 Фm .
38. ОСНОВЫ ТЕОРИИ АСИНХРОННЫХ МАШИН. Сл. 36
K E – коэффициент трансформации ЭДС:KE
E1 W1 K об 1
.
E 2 W2 K об 2
Второй закон Кирхгофа для обмотки статора:
u1 e1 e 1 io R1 ;
u1 e1 e 1 io R1 ;
U 1 E 1 E 1 I o R1 ;
E 1 j I o X 1 ;
E I (( RR jX
U
jX1 1).).
U
11
11
oo
11
I o ( 20 40%) I 1 H ;
Po 3 I o2 R1 PCT 1 PCT 2 .
39. ОСНОВЫ ТЕОРИИ АСИНХРОННЫХ МАШИН. Сл. 37
б)Короткое замыкание АД
1) Эксплуатационное КЗ ( U1 U1 H );
2) Опытное КЗ ( U1 U K );
U K ( 15 30%) U1 H ;
e2 i2 F2 ;
т.е.
F 1 и F 2
( n2 C
60 f 2 60 f 1
n1 );
p
p
взаимно неподвижны.
F 1 F 2 F OK ;
при опытном КЗ
FOK 0 ,
F 1 F 2 0 ;
40. ОСНОВЫ ТЕОРИИ АСИНХРОННЫХ МАШИН. Сл. 38
I I m 2 W2 K об 2 ;1
2
m1 W1 K об 1
Ki
I
I 1 2 ;
Ki
- коэффициент трансформации токов,
m1 W1 K об 1
Ki
.
m 2 W 2 K об 2
Второй закон Кирхгофа для статора:
для ротора:
E 1 j I 1 X 1 ;
u1 K e1 e 1 i1 R1 ;
e2 e 2 i2 R2 ;
E 2 j I 2 X 2 ;
U 1 K E 1 I 1 ( R1 j X 1 );
0 E 2 I 2 ( R2 j X 2 );
ток неподвижного
E
2
I
.
2
ротора
R2 j X 2
PK PЭЛ 1 PЭЛ 2 m1 I 12 R1 m 2 I 22 R2 .
41. ОСНОВЫ ТЕОРИИ АСИНХРОННЫХ МАШИН. Сл. 39
Работа АД при вращающемся ротореn1 n2
s
, Скольжение ротора.
n1
Обмотка ротора пересекается магнитным
частотой n n n .
S
1
2
Частота индуктируемой в роторе ЭДС:
потоком
с
p nS p ( n1 n2 ) p n1 ( n1 n2 )
f2
;
60
60
60
n1
p n1
f1
;
60
f 2 f1 s .
ЭДС в обмотке вращающегося ротора:
E2 S 4 ,44 f 2 W2 K об 2 Фm 4 ,44 f 1 s W2 K об 2 Фm .
Учитывая, что ЭДС при заторможенном роторе:
получаем:
E 4 ,44 f W K Ф ,
2
1
2
об 2
m
42. ОСНОВЫ ТЕОРИИ АСИНХРОННЫХ МАШИН. Сл. 40
E2 S E2 s .e2 S i2 F2 nF 2 ;
nF 2 - частота вращения МДС ротора
nF 2
относительно ротора,
60 f 2 60 f 1 s
n1 s n1 n2 .
p
p
Частота вращения МДС ротора относительно статора:
n2 n2 F n1 .
43. ОСНОВЫ ТЕОРИИ АСИНХРОННЫХ МАШИН. Сл. 41
Приведение вращающегосяротора АД к неподвижному
Второй закон Кирхгофа для вращающегося ротора:
E 2 S I 2 ( R2 jX 2 S );
E2 S E2 s ;
X 2S X 2 s;
E 2 s I 2 ( R2 j X 2 s ),
I 2
E 2 s
R2 j X 2 s
Ток вращающегося ротора
откуда:
E 2
R2
j X2
s
Ток неподвижного
ротора с активным
R2
сопротивлением
s
44. ОСНОВЫ ТЕОРИИ АСИНХРОННЫХ МАШИН. Сл. 42
Такой псевдозаторможенный АД можно отождествить странсформатором, работающим на активную нагрузку:
статор
R1 X1
ротор
X 2 R2
1 s
R R2
s
R2
1 s
Rд
R2 R2
.
s
s
45. Приведение обмотки ротора к обмотке статора. Сл. 43
Приведение обмотки ротора к обмотке статораЧтобы векторы ЭДС, напряжений и токов обмотки статора
и ротора можно было изобразить на одной векторной диаграмме,
следует параметры обмотки ротора привести к обмотке
статора, т.е. обмотку ротора с числом фаз
m 2 обмоточным
коэффициентом K об 2 и числом витков одной фазной обмотки W2
заменить обмоткой с m1 , W1 , K об1 . При этом мощности и
фазные сдвиги векторов ЭДС и токов ротора после приведения
должны остаться такими же, что и до приведения.
m 2 m1 ;
W2 W1 ;
2 K об 1 ;
K об
E 2 E1 ;
46. Приведение обмотки ротора к обмотке статора. Сл. 44
Приs 1 приведенная ЭДС ротора:
E1 K e E 2
W1 K об 1
E2 ,
W2 K об 2
W1 K об 1
где K e
– коэффициент трансформации напряжения
W 2 K об 2
в асинхронной машине при неподвижном роторе.
Приведенный ток ротора:
I 2
где
I2
,
Ki
m1 W1 K об 1
– коэффициент трансформации тока
Ki
m 2 W2 K об 2
асинхронной машины.
В отличии от трансформаторов в асинхронных двигателях
коэффициенты трансформации напряжения и тока не равны:
Ke Ki .
47. Приведение обмотки ротора к обмотке статора. Сл. 45
Объясняется это тем, что число фаз в обмотках статора иротора в общем случае не одинаково ( m1 m2 ). Лишь в
двигателях с фазным ротором, у которых
m1 m2 , эти
коэффициенты равны.
Потери активной мощности в обмотке реального и
приведенного ротора должны остаться одинаковыми:
2
m 2 I R2 m 2 I 2 R2 .
2
2
Тогда активное, индуктивное и полное сопротивление
обмотки ротора, а также приведенное добавочное активное
сопротивление определяются по формулам:
R2 K e K i R2 ;
X 2 K e K i X 2 ;
Z 2 K e K i Z 2 ;
Rд K e K i Rд .
48. Приведение обмотки ротора к обмотке статора. Сл. 46
Следует обратить внимание на некоторую спецификуопределения числа фаз m2 и
числа
витков W2 для
короткозамкнутой обмотки ротора. Каждый стержень этой
обмотки рассматривают как одну фазу, а поэтому число витков
одной фазы короткозамкнутой обмотки ротора W2 0 ,5 ;
обмоточный коэффициент такой обмотки kоб 2 1 , а число фаз
m2 Z 2 , т.е. равно числу стержней в короткозамкнутой
обмотке ротора.
Подставив в уравнение напряжений для обмотки ротора
приведенные
значения
параметров
обмотки
ротора
E'2 , I '2 , R'2 и X '2 , получим уравнение напряжений обмотки
ротора в приведенном виде:
'
R
E j I X '2 I 2 0.
s
'
'
2
Величину
R2
s
'
2
'
2
можно представить в виде:
R'2 R'2 R'2 s
'
'
' 1 s
R2 R2 R2
,
s
s
s
s
49. Приведение обмотки ротора к обмотке статора. Сл. 47
тогда уравнение ЭДС для цепи ротора в приведенныхпараметрах примет вид:
0 E 2 j I 2 X '2 I 2 R'2 I 2 R'2
'
'
'
'
1 s
.
s
Для асинхронного двигателя (так же как и для
трансформатора) можно построить векторную диаграмму.
Основанием для построения этой диаграммы являются
уравнения токов и уравнения напряжений обмоток статора и
ротора.
'
'
Угол сдвига фаз между ЭДС E 2 и током I 2
2 arctg( X '2 s / R'2 ).
Так как векторную диаграмму асинхронного двигателя
строят по уравнениям напряжений и токов, аналогичным
уравнениям трансформатора, то порядок построения этой
диаграммы
такой
же,
что
и
векторной
диаграммы
трансформатора.
50. Приведение обмотки ротора к обмотке статора. Сл. 48
Нарисунке
представлена
векторная
диаграмма
асинхронного
двигателя.
От
векторной
диаграммы
трансформатора она отличается тем, что сумма падений
напряжения в обмотке ротора (во вторичной обмотке)
уравновешивается ЭДС E 2 обмотки неподвижного ротора
( n2 0 ), так как обмотка ротора замкнута накоротко. Однако
если падение напряжения OA I '2 R'2 ( 1 s ) / s рассматривать
'
как напряжение на некоторой активной нагрузке R2 ( 1 s ) / s ,
подключенной на зажимы неподвижного ротора, то векторную
диаграмму асинхронного двигателя можно рассматривать как
векторную диаграмму трансформатора, на зажимы вторичной
обмотки
которого
подключено
переменное
активное
'
сопротивление R2 ( 1 s ) / s . Иначе говоря, асинхронный
двигатель
в
электрическом
отношении
подобен
трансформатору, работающему на чисто активную нагрузку.
Активная мощность вторичной обмотки такого трансформатора
'
'2
P2 m1 I 2 R'2 ( 1 s ) / s представляет собой полную
механическую
мощность,
развиваемую
асинхронным
двигателем.
51. Приведение обмотки ротора к обмотке статора. Сл. 49
Векторная диаграмма асинхронного двигателя52. Приведение обмотки ротора к обмотке статора. Сл. 50
Уравнениям напряжений и токов, а также векторнойдиаграмме
асинхронного
двигателя
соответствует
электрическая схема замещения асинхронного двигателя.
На рисунке а представлена Т-образная схема замещения.
Схемы замещения асинхронного двигателя
53. Приведение обмотки ротора к обмотке статора. Сл. 51
Магнитная связь обмоток статора и ротора в асинхронномдвигателе на схеме замещения заменена электрической связью
'
цепей статора и ротора. Активное сопротивление R2 ( 1 s ) / s
можно рассматривать как внешнее сопротивление, включенное
в обмотку неподвижного ротора. В этом случае асинхронный
двигатель асинхронный двигатель аналогичен трансформатору,
работающему на активную нагрузку. Сопротивление R'2 ( 1 s ) / s
– единственный переменный параметр схемы. Значение этого
сопротивления определяется скольжением, а следовательно,
механической нагрузкой на валу двигателя. Так, если
нагрузочный момент на валу двигателя M 2 0 , то скольжение
s 0. При этом R'2 ( 1 s ) / s , что соответствует работе
двигателя в режиме ХХ. Если же нагрузочный момент на валу
двигателя превышает его вращающий момент, то ротор
'
останавливается ( s 1 ). При этом R2 ( 1 s ) / s 0 , что
соответствует режиму КЗ асинхронного двигателя.
54. Приведение обмотки ротора к обмотке статора. Сл. 52
Более удобной для практического применения является Гобразная схема замещения (рис. б), у которой намагничивающийконтур ( Z m Rm j X m ) вынесен на входные зажимы схемы
замещения. Чтобы при этом намагничивающий ток I 0 не изменил
своего значения, в этот контур последовательно включают
сопротивления обмотки статора R1 и X 1 . Полученная таким
образом схема удобна тем, что она состоит из двух параллельно
соединенных контуров: намагничивающего с током I 0 и рабочего
с током I 2/ .
Расчет параметров рабочего контура Г-образной схемы
замещения требует уточнения, что достигается введением в
расчетные формулы коэффициента c1 (рис. б), представляющего
собой отношение напряжения сети U 1 к ЭДС статора E1 при
идеальном холостом ходе ( s 0 ). Так как в этом режиме ток
холостого хода асинхронного двигателя весьма мал, то U 1
оказывается лишь немногим больше, чем ЭДС E1 , а
их
отношение c1 U1 / E1 мало отличается от единицы.
55. Приведение обмотки ротора к обмотке статора. Сл. 53
Для двигателей мощностью 3 кВт и более c1 1,05 1,02 , поэтомус целью облегчения анализа выражений, характеризующих
свойства асинхронных двигателей и упрощения практических
расчетов, примем c1 1. Возникшие при этом неточности не
превышают значений, допустимых при технических расчетах.
/
Например, при расчете тока ротораэтаI 2ошибка
составит от 2 до 5
%
(меньшие значения относятся к двигателям большей
мощности).
Воспользовавшись Г-образной схемой замещения и приняв
c1 1, запишем выражение тока в рабочем контуре:
I
/
2
или
I
/
2
U1
2
/
/ 1 s
/ 2
R
R
R
(
X
X
2
2
1
2 )
1
s
R
U1
2
/
/ 2
R
/
s
(
X
X
1
2
1
2 )
,
,
56. Электромагнитный момент и рабочие характеристики АД. Сл. 54
Электромагнитный моменти рабочие характеристики АД
Потери, энергетическая диаграмма и КПД асинхронного
двигателя
Преобразование электрической энергии в механическую в
асинхронном двигателе, как и в других электрических машинах,
связано с потерями энергии, поэтому полезная мощность на
выходе двигателя P2 всегда меньше мощности на входе
(потребляемой мощности) P1 на величину потерь P :
P2 P1 P .
Потери P преобразуются в теплоту, что в конечном
итоге ведет к нагреву машины. Потери в электрических машинах
разделяются на основные и добавочные. Основные потери
включают в себя магнитные, электрические и механические.
57. Электромагнитный момент и рабочие характеристики АД. Сл. 55
Магнитные потери PM васинхронном
двигателе
вызваны потерями на гистерезис и потерями на вихревые токи,
происходящими в сердечнике при его перемагничивании.
Величина
магнитных
потерь
пропорциональна
частоте
перемагничивания PM f , где 1 ,3 1 ,5. Частота перемагничивания сердечника статора равна частоте тока в сети ( f f1 ),
а частота перемагничивания сердечника ротора f f 2 f 1 s .
f 1 50 Гц и
При частоте тока в сети
номинальном
скольжении sном 1 8% частота перемагничивания ротора
f f 2 2 4 Гц, поэтому магнитные потери в сердечнике ротора
настолько малы, что их в практических расчетах не учитывают.
Электрические потери
в асинхронном двигателе
вызваны нагревом обмоток статора и ротора проходящими по
ним токам. Величина этих потерь пропорциональна квадрату
тока в обмотке:
электрические потери в обмотке статора
Pэ1 m1 I 12ф r1 ;
58. Электромагнитный момент и рабочие характеристики АД. Сл. 56
электрические потери в обмотке ротораPэ 2 m2 I 22ф r2 m1 I 2/ ф2 r2/ .
Здесь r1 и r2 – активные сопротивления обмоток фаз статора
и ротора, пересчитанные на рабочую температуру раб
1 (
20 ) ,
r1 r1 20 1 ( раб 20 ) ;
r2 r2 20
раб
где r1 20 и r2 20 – активные сопротивления обмоток при
1 20 0 C ;
температуре
– температурный коэффициент, для меди и алюминия
0 ,004.
Электрические потери в роторе прямо пропорциональны
скольжению:
Pэл 2 s Pэм ,
где
Pэм – электромагнитная мощность асинхронного двигателя:
59. Электромагнитный момент и рабочие характеристики АД. Сл. 57
Pэм P1 ( PМ Pэл1 ).Из предыдущего уравнения следует, что работа
асинхронного двигателя экономичнее при малых скольжениях,
так как с ростом скольжения растут электрические потери в
роторе.
В асинхронных двигателях с фазным ротором помимо
перечисленных электрических потерь имеют место еще и
электрические потери в щеточном контакте Pэл .щ 3 I 2 U щ / 2 ,
где U 2 ,2 В – переходное падение напряжения на пару
щ
щеток.
Механические потери р мех – это потери на трение в
подшипниках и на вентиляцию. Величина этих потерь
пропорциональна квадрату частоты вращения ротора
В асинхронных двигателях с фазным ротором механические
потери происходят еще и за счет трения между щетками и
контактными кольцами ротора.
60. Электромагнитный момент и рабочие характеристики АД. Сл. 58
Добавочные потери включают в себя все видытрудноучитываемых потерь, вызванных действием высших
гармоник МДС, пульсацией магнитной индукции в зубцах и
другими причинами. В соответствии со стандартом добавочные
потери асинхронных двигателей принимают равными 0 ,5% от
подводимой к двигателю мощности P1 :
pдоб 0 ,005 Р1 .
При расчете добавочных потерь для неноминального
режима следует пользоваться выражением
/
pдоб
рдоб 2 ,
где I 1 / I 1ном – коэффициент нагрузки.
Сумма всех потерь асинхронного двигателя:
P PM Pэл1 Pэл 2 pмех pдоб .
61. Электромагнитный момент и рабочие характеристики АД. Сл. 59
На рисунке представлена энергетическая диаграммаасинхронного двигателя, из которой видно, что часть
P1 m1 U 1ф I 1ф cos 1
подводимой к двигателю мощности
затрачивается в статоре на магнитные PM и электрические Pэл 1
потери. Оставшаяся после этого электромагнитная мощность
Pэм передается на ротор, где частично расходуется на
электрические потери Pэл 2 и
преобразуется
в
полную
/
механическую мощность P2 . Часть мощности идет на
покрытие механических p мех и добавочных потерь pдоб , а
оставшаяся часть этой мощности
P2 составляет полезную
мощность двигателя.
Электрические потери в обмотках Pэл 1 и Pэл 2 являются
переменными потерями, так как их величина зависит от
нагрузки двигателя, т.е. от значений токов в обмотках статора и
ротора. Переменными являются также и добавочные потери pдоб .
Что же касается магнитных PM и механических pмех , то они
практически не зависят от нагрузки.
62. Электромагнитный момент и рабочие характеристики АД. Сл. 60
Энергетическая диаграмма асинхронного двигателя63. Электромагнитный момент и рабочие характеристики АД. Сл. 61
Коэффициент полезного действия асинхронного двигателяс изменениями нагрузки также меняет свою величину: в режиме
холостого хода КПД равен нулю, а затем с ростом нагрузки он
увеличивается, достигая максимума при нагрузке ( 0 ,7 0 ,8 ) Pном .
При дальнейшем увеличении нагрузки КПД незначительно
снижается, а при перегрузке ( P2 Pном ) он резко убывает, что
объясняется интенсивным ростом переменных
потерь
( Pэл1 Pэл 2 pдоб ), величина которых пропорциональна квадрату
тока статора, и уменьшением коэффициента мощности. График
зависимости КПД от нагрузки f ( ) для
асинхронных
двигателей имеет такой же вид, как и для трансформатора.
КПД
трехфазных
асинхронных двигателей
общего
назначения при номинальной нагрузке составляет: для
двигателей мощностью от 1 до 10 кВт ном 75 88%, для
двигателей мощностью более 10 кВт ном 90 94%.
64. Электромагнитный момент и рабочие характеристики АД. Сл. 62
Коэффициент полезного действия является одним изосновных параметров асинхронного двигателя, определяющим
его энергетические свойства – экономичность в процессе
эксплуатации. Кроме того, КПД двигателя, а точнее величина
потерь в нем, регламентирует температуру нагрева его
основных частей и в первую очередь его обмотки статора. По
этой причине двигатели с низким КПД (при одинаковых условиях
охлаждения) работают при более высокой температуре нагрева
обмотки статора, что ведет к снижению их надежности и
долговечности.
65. Электромагнитный момент и рабочие характеристики АД. Сл. 63
Электромагнитный момент и механические характеристикиасинхронного двигателя
Электромагнитный
момент
асинхронного
двигателя
создается взаимодействием тока в обмотке ротора с
вращающимся магнитным полем. Электромагнитный момент M
пропорционален электромагнитной мощности:
где
Pэм
M
,
1
2 n 2 f1
1
60
p
– угловая скорость вращения поля статора.
Подставив в уравнение электромагнитного
значение электромагнитной мощности , получим:
2 /
/
Pэл2 m1 I 2 r2
M
.
s 1
s 1
момента
66. Электромагнитный момент и рабочие характеристики АД. Сл. 64
Таким образом электромагнитный момент асинхронногодвигателя пропорционален мощности электрических потерь
в обмотке ротора.
Если значение тока ротора из Г-образной схемы
замещения подставить в последнее выражение, то получим
формулу электромагнитного момента асинхронной машины:
m1 U 12ф r2/ p
M
.
/
r2 2
2 f 1 s ( r1 ) ( x1 x2/ )2
s
Параметры схемы замещения асинхронной машины r1 , r2/,
x1 и x 2/ , входящие в последнюю формулу, являются
постоянными параметрами, так как их значения при
изменениях
нагрузки
машины
остается
практически
неизменным. Также постоянными можно считать напряжение на
обмотке фази статора U 1 и частоту f 1. В выражении момента
единственная переменная величина – скольжение s , которое
для различных режимов работы асинхронной машины может
принимать разные значения в диапазоне от до
.
67. Электромагнитный момент и рабочие характеристики АД. Сл. 65
Рассмотрим зависимость момента от скольжения M f ( s )при U 1 const , f 1 const и постоянных параметрах схемы
замещения. Эту зависимость принято называть механической
характеристикой асинхронной машины. Анализ формулы
момента,
представляющей
аналитическое
выражение
механической характеристики M f ( s ) , показывает, что при
значениях скольжения s 0 и s электромагнитный момент
M 0 . Из этого следует, что механическая характеристика
M f ( s ) имеет максимум.
Для определения величины критического скольжения sкр ,
соответсвующего максимальному моменту, необходимо взять
первую производную момента по скольжению и приравнять ее
нулю:
dM 0.
ds
В результате:
sкр
r2/
r12 ( x1 x2/ )2
.
68. Электромагнитный момент и рабочие характеристики АД. Сл. 66
Подставив значение критического скольжения в выражениеэлектромагнитного момента, посля ряда преобразований
получим формулу максимального момента:
M max
m1 U 12ф p
4
f 1 r12 ( x1 x2/ )2
.
В
выражениях
для
критического
скольжения
и
максимального
момента
знак
плюс
соответствует
двигательному, а знак минус – генераторному режиму работы
асинхронной машини.
Для асинхронних машин общего назначения активное
сопротивление обмотки статора r1 намного меньше суммы
индуктивных
сопротивлений: r1 ( x1 x2/ ). Поэтому,
пренебрегая величиною r1, получим упрощенные формулы
критического скольжения:
sкр
r2/
x x/
1
2
,
69. Электромагнитный момент и рабочие характеристики АД. Сл. 67
и максимального момента:M max
m1 U 12ф p
f 1 x1 x 2/
.
4
Анализ
точной формулы максимального момента
показывает, что максимальный момент асинхронной машины в
генераторном режиме больше, чем в двигательном ( Mmax Г Mmax Д ).
На рисунке показана механическая характеристика асинхронной
машины M f ( s ) при U 1 const , f 1 const .
На
этой
характеристике указаны зоны, соответствующие различным
режимам работы: двигательный режим ( 0 s 1 ), когда
электромагнитный
момент
M является вращающим;
генераторный режим ( s 0 ) и
тормозной
режим
противовключения ( 1 s ), когда
электромагнитный
момент M является тормозящим.
Из формулы электромагнитного момента следует, что он
пропорционален квадрату напряжения сети: M U 12ф . Это в
значительной степени отражается на эксплуатационных
свойствах двигателя:
70. Электромагнитный момент и рабочие характеристики АД. Сл. 68
даже небольшое снижение напряжения сети вызываетзаметное уменьшение вращающего момента асинхронного
двигателя. Например, при уменьшении напряжения сети на
10%
относительно
номинального ( U 1 0 ,9 U 1ном )
электромагнитный момент двигателя уменьшается на 19%:
M / 0 ,9 2 M 0 ,81 M , где M – момент при номинальном
напряжении сети, а M / – момент при пониженном напряжении.
Залежність режимів роботи асинхронної машини від ковзання
71. Электромагнитный момент и рабочие характеристики АД. Сл. 69
Для анализа работы асинхронного двигателя удобнеевоспользоваться механической характеристикой
M f ( s ),
представленной на следующем рисунке. При включении
двигателя в сеть магнитное поле статора, не обладая инерцией,
сразу же начинает вращение с синхронной частотой n1 , в то же
время ротор двигателя под влиянием сил инерции в начальный
момент пуска остается неподвижным ( n2 0 ) и скольжение s 1.
Подставив в исходное уравнение электромагнитного
момента скольжение s 1, получим выражение пускового
момента асинхронного двигателя:
M
m1 U 12ф r2/ p
2
f 1 ( r1 r2/ )2 ( x1 x2/ )2
.
Под действием этого момента начинается вращение ротора
двигателя, при этом скольжение уменьшается, а вращающий
момент возрастает в соответствии с характеристикой
sкр
M f (скольжении
s ).
При критическом
момент достигает максимального значения M max .
72. Электромагнитный момент и рабочие характеристики АД. Сл. 70
Зависимость электромагнитного моментаасинхронного двигателя от скольжения
73. Электромагнитный момент и рабочие характеристики АД. Сл. 71
Есть еще одна формула электромагнитного момента.Формулу M Pэл 2 / 1 s преобразуем к более удобному для
анализа виду, подставив в нее значения:
1 2 n1 / 60 2 f 1 / p;
Pэл 2 m2 I 2 E2 S cos 2 ,
где
2
– угол сдвига фаз между ЭДС и током ротора.
Тогда:
M p m2 K об 2 / 2 Фm I 2 cos 2 c м Фm I 2 cos 2 ,
где
с м p m2 K об 2 / 2
– постоянная.
Применение вышеуказанных формул для расчета
механических характеристик асинхронных двигателей не всегда
возможно, так как параметры схемы замещения двигателей
обычно не приводятся в каталогах и справочниках, поэтому для
практических расчетов обычно пользуются упрощенной
формулой момента (формулой Клосса).
74. Электромагнитный момент и рабочие характеристики АД. Сл. 72
В основу этой формулы положено допущение, что активноесопротивление обмотки статора асинхронного двигателя
Тогда r1 0.
M M max
2
sкр .
s
sкр s
Расчет механической характеристики намного упрощается,
если его вести в относительных единицах
M M / Mимеет
В этом случае уравнение механической характеристики
max .
вид
M
2
sкр
s
sкр s
.
Применение
упрощенной
формулы
наиболее
целесообразно при расчетах рабочего участка механической
характеристики при скольжениях
s sкр .
75. Энергетическая диаграмма АД. Сл. 73
Энергетическая диаграмма АД (сокр. вариант)К статору из сети подводится мощность:
P1 m1 U1ф I1ф cos .
Потери активной мощности в обмотке статора (в меди):
Pмеди1 m1 I12ф R1.
76. Энергетическая диаграмма АД. Сл. 74
В ротор посредством вращающегося магнитного поляпередается электромагнитная мощность:
Pэм P1 Pм1 Pc1 ,
где Pc1 потери в стали статора.
Потери активной мощности в обмотке ротора (в меди):
Pм2 m2 I 22ф R2 .
Оставшаяся
часть
механическую мощность:
мощности
превращается
в
Pмех Pэм Pм 2 .
Выходная полезная мощность двигателя:
P2 Pмех Pмех Pдоб ,
где Pмех механические потери на трение в подшипниках,
вентиляцию;
Pдоб добавочные потери,
обусловленные зубчатой
структурой поверхности статора и ротора.
77. Энергетическая диаграмма АД. Сл. 75
Выразим электромагнитную и механическую мощностьчерез электромагнитный вращающий момент М:
Pэм M 1 ; Pмех M 2 ,
где 1 2 n1 / 60 и 2 2 n2 / 60 - угловые скорости
магнитного поля и ротора.
Из энергетической диаграммы следует, что:
или
Pэл 2 Pэм Pмех
Pэл 2 M 1 M 2 M 1 ( 1 2 ) / 1 M 1 s.
M Pэл 2 /( 1 s);
s Pэл 2 /(M 1 ) Pэл 2 / Pэм .
78. Энергетическая диаграмма АД. Сл. 76
Связь между скольжением и КПДПредставим КПД асинхронного двигателя в виде:
P2 / P1 Pэм / P1 P2 / Pэм 1 2 ,
где 1 и 2 – КПД статора и ротора.
Поскольку:
2 P2 / Pэм Pэм Pэл 2 Pмех Pдоб / Pэм ,
справедливо неравенство:
2 Pэм Pэл 2 / Pэм 1 Pэл 2 / Pэм 1 s .
Для работы асинхронного двигателя в номинальном режиме
с высоким КПД необходимо, чтобы в этом режиме он имел
небольшое скольжение:
sном 0,01 0,06.
Номинальную частоту вращения ротора n2 ном
можно принять равной приблизительно 0,97 n1.
n1 (1 sном )
79. Энергетическая диаграмма АД. Сл. 77
Электромагнитный вращающий моментФормулу M Pэл 2 / 1 s преобразуем к более удобному
для анализа виду, подставив в нее значения:
1 2 n1 / 60 2 f1 / p;
Pэл 2 m2 I 2 E2 S cos 2 ,
где 2 – угол сдвига фаз между ЭДС и током ротора.
Тогда:
M p m2 Kоб 2 / 2 Фm I 2 cos 2 cм Фm I 2 cos 2 ,
где см p m2 Kоб 2 / 2
– постоянная.
Электромагнитный момент пропорционален произведению
магнитного потока на активную составляющую тока ротора.
80. Энергетическая диаграмма АД. Сл. 78
Г – образная схеманамагничивающим контуром)
замещения
X 1
C1 1
1, 03 1, 08;
Xm
I 2
I oo при S 0 ; I 2 .
c1
(с
вынесенным
81. Энергетическая диаграмма АД. Сл. 79
Определение электромагнитного момента черезэлектромагнитную мощность
Pэм Pмех Pэл 2 ; M 1 M 2 m2 I 22 r2 ;
m2 I 22 r2
m2 I 22 r2
m2 I 22 r2
M
.
1 2
1 S
1
2
1
1
r2
m1 I 2
S
M
для приведенного ротора.
2
1
Из Г-образной схемы замещения:
I 2
U1
2
2 r2
2
c1 r1 c1 c1 X 1 c1 X 2
S
I 2 c1 I 2
2
U1
c1 r2
2
r1
X 1 c1 X 2
S
2
;
.
82. Энергетическая диаграмма АД. Сл. 80
Заменим1
2 n1
p n1 1 2 f1
2
.
60
60 p
p
Тогда
r2
m1 p U
S
M
.
2
r2
2
2 f1 r1 c1 X 1 c1 X 2
S
2
1
Или
M
m1 U12
r2
S
r2
2
1 r1 c1 X 1 c1 X 2
S
2
.
Н м
Н м
83. Энергетическая диаграмма АД. Сл. 81
Механические характеристикиM f s ;
n2 f M ;
Упрощенный анализ:
а) s 0 0,1;
f1 const .
r1 0.
r1 c1
M A s;
б) s 1 ;
при
U1 const ;
r2
X 1 c1 X 2
s
X
к
r2
c1 X к ;
s
B
M
.
s
84. Энергетическая диаграмма АД. Сл. 82
Графикидвигателя
механической
характеристики
асинхронного
85. Энергетическая диаграмма АД. Сл. 83
Для определения критического скольжения, значениекоторого соответствует максимальному моменту, необходимо
взять производную момента по скольжению и приравнять ее к
нулю:
dM
M max ?
Тогда
Sm
dS
0.
R2 Rд c1 .
2
R12 X 1 c1 X 2
Из этого выражения следует, что критическое скольжение
не зависит от подводимого к обмотке статора напряжения.
Если подставить это скольжение в исходную формулу
электромагнитного момента, после преобразований получим
выражение для определения максимального электромагнитного
момента:
M max
m1 U12
1 c1 R1 R12 ( X1 c1 X 2' )2
.
86. Энергетическая диаграмма АД. Сл. 84
Знак плюс в последних уравнениях относится кдвигательному или тормозному режимам работы, знак минус – к
генераторному. Из этих выражений следует, что значения sкр (sm )
как в двигательном, так и в генераторном режиме одинаковы, а
максимальный момент в генераторном режиме больше, чем в
двигательном. Обычно из-за малого сопротивления R1 разница
в моментах получается небольшой. Необходимо также отметить,
что максимальный момент не зависит от активного
сопротивления цепи ротора R2 , однако это сопротивление
оказывает влияние на скольжение sкр , при котором асинхронная
машина развивает максимальный момент M max .
В асинхронных машинах активное сопротивление статора R1
в несколько раз меньше индуктивных сопротивлений X 1 и X 2' .
Поэтому для практических целей, полагая R1 0 получим:
R2
Sm
;
Xк
M max
m1 U12
.
'
2 1 ( X 1 c1 X 2 )
87. Энергетическая диаграмма АД. Сл. 85
Графикмеханической
характеристики
асинхронного
двигателя во всем диапазоне изменения скольжения выглядит
следующим образом:
88. Энергетическая диаграмма АД. Сл. 86
89. Энергетическая диаграмма АД. Сл. 87
На рисунке приведены кривые M f s для различныхзначений R2 при работе машины со скольжением s 0. Они
R2 момента смещается
показывают, что с увеличением максимум
в область больших скольжений, сохраняя при этом свое
значение.
Из последней формулы следует, что максимальный момент
обратно
пропорционален
индуктивным
сопротивлениям
'
рассеяния обмоток статора X 1 и ротора X 2 . Поэтому при
проектировании машины для увеличения M max в первую очередь
следует уменьшать эти сопротивления.
90. Энергетическая диаграмма АД. Сл. 88
Практическая формула для построениямеханической характеристики (формула Клосса)
Часто при разработке электропривода проектировщик
располагает только каталожными данными двигателя. Но для
решения ряда вопросов ему необходимо также иметь
механическую характеристику выбранного двигателя.
Если разделить выражение текущего электромагнитного
момента (исходная формула) на выражение для определения
максимального момента
M / M max , то после некоторых
упрощений получим:
M
2
.
S Sкр
M max
Sкр
S
Эта формула впервые была получена М.Клоссом, поэтому
она называется формулой Клосса. Она находит широкое
применение в расчетной практике и справедлива при
постоянных параметрах машины.
91. Энергетическая диаграмма АД. Сл. 89
Для полученияM п M max :
r2 rдоб
Sm
1,
Xк
откуда
X к r2 .
rдоб
92. Энергетическая диаграмма АД. Сл. 90
Устойчивость работы АД с механизмомСистема называется динамически устойчивой, если, будучи
выведенной из условия устойчивого режима под действием
внешнего возмущения, она способна возвратиться в исходное
состояние за счет внутренних сил при снятии внешнего
возмущения.
Т.е. если двигатель после исчезновения возмущения
возвращается в исходное положение, то это положение
устойчиво.
И, наоборот, двигатель неустойчив в работе, если малые
возмущения приводят к большим изменениям режима работы.
Если бы двигатель работал в режиме, соответствующем
точке 2, то при малейших нарушениях режима двигатель
перешел бы работать в точку 1 или точку 3, но никогда бы не
возвратился работать в точку 2 при снятии возмущения. Режим
работы в точке 3 неприемлем, так как характеризуется малой
скоростью вращения, плохим КПД и наличием больших токов в
обмотках.
93. Энергетическая диаграмма АД. Сл. 91
Определение устойчивого равновесияТаким образом, устойчивой областью работы двигателя
считается участок механической характеристики влево от точки
4, когда 0 s sкр .
dM dM ст
.
Условие устойчивой работы двигателя:
dn
dn
94. Энергетическая диаграмма АД. Сл. 82
Уравнение движения:M M ст M дин ,
где M дин J
d
dn
– динамический момент ( J – момент
2 J
dt
dt
инерции вращающихся частей двигателя и механизма).
В точке 1:
(устойчивый режим).
M M ст
Если кратковременно возрастет нагрузка, т.е.:
M M ст ,
то M дин 0 , и система замедляется, а s s1 (это точка 1 ).
При снятии возмущения (снимается дополнительная
нагрузка): M M ст (в точке 1 ) и система начинает
ускоряться до положения: M M ст ; M дин 0.
Это будет в точке 1, т.е. система возвратилась в исходное
состояние.
При кратковременном снижении нагрузки (т. 1 ) система
также способна возвратиться в исходное состояние.
95. Энергетическая диаграмма АД. Сл. 93
Таким образом, точка 1 является точкой устойчивогорежима работы АД; точки 2, 3 – неустойчивый режим; точка 4 –
режим неустойчивого равновесия.
96. Опытное определение параметров и расчет рабочих характеристик АД. Сл. 94
Опытное определение параметров и расчетрабочих характеристик АД
Основные понятия
Существует два метода получения данных для
построения рабочих характеристик асинхронного двигателей:
метод непосредственной нагрузки и косвенный метод. Метод
непосредственной
нагрузки
заключается
в
опытном
исследовании двигателя в диапазоне нагрузок от холостого
хода до режима номинальной нагрузки с измерением
необходимых параметров. Этот метод обычно применяется для
двигателей мощностью не более 10 – 15 кВт. С ростом
мощности двигателя усложняется задача его нагрузки, растут
непроизводительный расход электроэнергии и загрузка
электросети. Применение этого метода ограничивается еще и
тем, что не всегда представляется возможным создать
испытательную установку по причине отсутствия требуемого
оборудования и недопустимости перегрузки электросети.
97. Опытное определение параметров и расчет рабочих характеристик АД. Сл. 95
Широкое применение получил более универсальныйкосвенный метод, применение которого не ограничивается
мощностью двигателя. Этот метод заключается в выполнении
двух экспериментов: опыта холостого хода и опыта короткого
замыкания.
Опыты ХХ и КЗ асинхронных двигателей в основном
аналогичны таким же опытам трансформаторов. Но они
имеют и некоторые особенности, обусловленные главным
образом наличием у двигателя вращающейся части – ротора.
Кроме того, при переходе из режима ХХ в режим КЗ
параметры обмоток двигателя (активные и индуктивные
сопротивления) не остаются неизменными, что объясняется
зубчатой поверхностью статора и ротора. Все это создает
некоторые затруднения в проведении опытов и в
последующей обработке их результатов.
98. Опытное определение параметров и расчет рабочих характеристик АД. Сл. 96
Опыт холостого ходаПитание асинхронного двигателя при опыте ХХ
осуществляется через индукционный регулятор напряжения
ИР (см. рис.) или регулировочный автотрансформатор,
позволяющие изменять напряжение в широких пределах. При
этом вал двигателя должен быть свободным от механической
нагрузки. Опыт начинают с повышенного напряжения питания
U 1 1,15 U 1ном , затем постепенно понижают напряжение до
0 ,4 U 1ном так, чтобы снять показания приборов в 5 – 7 точках.
При этом один из замеров должен соответствовать
номинальному напряжению U 1 ном . Измеряют
линейные
значения напряжений и токов и вычисляют их средние
значения:
U cp
I 0 cp
U AB U BC U CA
;
3
I0 A I0 B I0C
,
3
99. Опытное определение параметров и расчет рабочих характеристик АД. Сл. 97
а затем в зависимости от схемы соединения обмотки статораопределяют фазные значения напряжения и тока ХХ:
при соединении в звезду
U1
U cp
3
;
I 0 I 0 cp ;
при соединении в треугольник
U 1 U cp ;
I0
I 0 cp
3
.
Ваттметр W измеряет активную мощность P0 , потребляемую двигателем в режиме ХХ, которая включает в себя
электрические потери в обмотке статора m1 I 02 r1 , магнитные
потери в сердечнике статора Pc и механические потери Pтр :
P0 m1 I 02 r1 Pc Pтр .
r1 – активное сопротивление фазы обмотки
Здесь
статора, измеренное непосредственно после отключения
двигателя от сети, чтобы обмотки не успели охладиться.
100. Опытное определение параметров и расчет рабочих характеристик АД. Сл. 98
Схема включения трехфазного асинхронного двигателяпри опытах ХХ и КЗ
101. Опытное определение параметров и расчет рабочих характеристик АД. Сл. 99
Сумма магнитных и механических потерь двигателя:P Pc Pтр Р0 m1 I r1 .
/
0
2
0
Коэффициент мощности для режима ХХ:
cos 0
P0
.
m1 U 1 I 0
По
результатам
измерений
и
вычислений
строят
характеристики ХХ I 0 , P0 , P0/ , cos 0 f(U 1 ), на которых
/
отмечают значения величин I 0 ном , P0нно , P0нно , cos 0нно ,
соответствующие номинальному напряжению U 1 ном (см. рис.).
/
Если график P0 f ( U 1 ) продолжить до пересечения с
осью ординат ( U1 0 ), то получим величину потерь Pтр . Это разделение магнитных и механических потерь основано на том, что
при неизменной частоте сети f 1 частота вращения двигателя в
режиме ХХ n0 , а следовательно, и механические потери
Pтр неизменны. В то же время магнитный поток прямо пропорционален ЭДС статора E 1 .
102. Опытное определение параметров и расчет рабочих характеристик АД. Сл. 100
Характеристики ХХ трехфазного асинхронного двигателя(3,0 кВт, 220/380 В, 1430 об/мин)
103. Опытное определение параметров и расчет рабочих характеристик АД. Сл. 101
Для режима ХХ U1 E1 , а потому при U 1 0 и магнитныйпоток 0 , а следовательно, и магнитные потери Pc 0.
Определив величину механических потерь Pтр , можно
вычислить магнитные потери:
Pc P0 Pтр .
Для асинхронных двигателей с фазным ротором в опыте
холостого хода определяют коэффициент трансформации
напряжений между обмотками статора и ротора. Этот
коэффициент с достаточной точностью может быть определен
по
отношению
средних
арифметических
линейных
(междуфазовых)
напряжений
статора
к
аналогичным
напряжениям ротора.
104. Опытное определение параметров и расчет рабочих характеристик АД. Сл. 102
Схема замещения АДСхема замещения АД при холостом ходе
105. Опытное определение параметров и расчет рабочих характеристик АД. Сл. 103
106. Опытное определение параметров и расчет рабочих характеристик АД. Сл. 104
Опыт короткого замыканияСхема соединений асинхронного двигателя при опыте КЗ
остается, как и в опыте ХХ. Но при этом измерительные
приборы должны быть выбраны в соответствии с пределами
измерения тока, напряжения и мощности. Ротор двигателя
следует жестко закрепить, предварительно установив его в
положение, соответствующее среднему току КЗ. С этой целью
к двигателю подводят небольшое напряжение ( U к 0 ,1 U 1ном )
и, медленно поворачивая ротор, следят за показаниями
амперметра, стрелка которого будет колебаться в зависимости
от положения ротора двигателя. Объясняется это взаимным
смещением зубцовых зон ротора и статора, вызывающего
колебания индуктивных сопротивлений обмоток двигателя.
Предельное значение тока статора при опыте КЗ
устанавливают исходя из допустимой токовой нагрузки
питающей сети и возможности провести опыт в минимальный
срок, чтобы не вызвать опасного перегрева двигателя.
107. Опытное определение параметров и расчет рабочих характеристик АД. Сл. 105
Для двигателей мощностью до 1 кВт возможно прове-дениеопыта начиная с номинального напряжения
U к U 1ном .
В этом случае предельный ток I к ( 5 7 ) I 1ном . Для
двигателей большой мощности сила предельного тока I к ( 2 ,5 5 ) I 1ном .
При выполнении опыта КЗ в учебных целях можно ограничиться
предельной силой I к ( 1 ,5 2 ,5 ) I 1 ном . При выполнении
опыта КЗ желательно соединение обмотки статора звездой.
Определив диапазон изменения тока статора при опыте КЗ,
опыт начинают с предельного значения этого тока, установив на
индукционном регуляторе соответствующее напряжение КЗ
Uк .
Затем постепенно
снижают это напряжение до значения,
при котором ток
достигает нижнего
предела установленного
Iк
диапазона его значений. При этом снимают показания приборов
для 5 – 7 точек, одна из которых должна соответствовать
номинальному току статора
( I к I 1ном ).
Продолжительность
опыта
должна
быть
минимально
возможной. После снятия последних показаний приборов
двигатель следует отключить и сразу же провести замер
активного сопротивления фазы обмотки статора r1/ , чтобы
определить температуру обмотки.
108. Опытное определение параметров и расчет рабочих характеристик АД. Сл. 106
Характеристики КЗ трехфазного асинхронного двигателя(3,0 кВт, 220/380 В, 1430 об/мин)
109. Опытное определение параметров и расчет рабочих характеристик АД. Сл. 107
Схема замещения АД при коротком замыкании110. Опытное определение параметров и расчет рабочих характеристик АД. Сл. 108
Круговая диаграмма асинхронной машиныПредставим схему замещения асинхронного двигателя в
упрощенном виде (см. рис.), где R r r ; X x x ;
R2 r1 c1 r / s ;
/
2
/ 1
2
X 2 x1 c1 x .
1
m
1
1
m
Упрощенная схема замещения асинхронного двигателя
Ветвь намагничивания R1 j X 1 не содержит переменных
параметров, поэтому векторная . диаграмма для нее содержит
лишь
два вектора: вектор тока I 0
и
вектор
напряжения
.
0
U 1 , сдвинутые по фазе относительно друг друга на угол
(см. след. рис. а).
111. Опытное определение параметров и расчет рабочих характеристик АД. Сл. 109
Схема замещения и векторная диаграмма АД112. Опытное определение параметров и расчет рабочих характеристик АД. Сл. 110
Построение круговой диаграммы АД1. Откладываем I o под углом o.
2. Откладываем I к под углом к .
3. H G делим пополам.
4. Проводим линию HK 2 | | оси абсцисс.
5. Проводим линию H K .
6. Через средину H K проводим перпендикуляр до
Точка С есть центр круга.
7. Отрезок K 2 K делим в отношении R1 / R2 .
8. Проводим линию НK1 до Т.
HK 2.
113. Опытное определение параметров и расчет рабочих характеристик АД. Сл. 111
Круговая диаграмма асинхронного двигателя114. Опытное определение параметров и расчет рабочих характеристик АД. Сл. 112
Круговая диаграмма асинхронного двигателя115. Опытное определение параметров и расчет рабочих характеристик АД. Сл. 113
P1 – потребляемая мощность;Pэм – электромагнитная мощность;
Pмех – механическая мощность;
P2
– полезная мощность.
ОН – идеальный ток холостого хода;
OH – реальный ток холостого хода;
НД – приведенный ток холостого хода;
ОД – ток статора;
Ое – реактивный ток статора;
Де – активный ток статора;
mi
mp
– масштаб тока;
– масштаб мощности;
116. Опытное определение параметров и расчет рабочих характеристик АД. Сл. 114
ОД – S1 – полная мощность двигателя;Ое – Q1– реактивная мощность двигателя;
Де – P1 – активная мощность двигателя;
Да – P2 – полезная мощность;
Дв – Pмех – механическая мощность;
Дс – Pэм – электромагнитная мощность;
Дd – мощность рабочего контура;
de ( pэл.o pCT 1 )
– мощность холостого хода;
сd – pэл1 – потери в меди статора;
вс – pэл.2 – потери в меди ротора;
ав – ( p мех pдоб ) – механические и добавочные потери.
Де
cos 1 ;
ОД
117. Опытное определение параметров и расчет рабочих характеристик АД. Сл. 115
Да P2;
Де P1
вс pэл 2
S
Дс Pэм
H S 0,
H S So ,
(скольжение);
– идеальный холостой ход;
– реальный холостой ход;
Д S S н – номинальный режим;
M S S к – критическая тока;
K S 1,0 – короткое замыкание (пуск);
T S – электромагнитный тормоз.
118. Опытное определение параметров и расчет рабочих характеристик АД. Сл. 116
Круговая диаграмма асинхронного двигателя119. Опытное определение параметров и расчет рабочих характеристик АД. Сл. 117
Рабочий участок круговой диаграммы120. Опытное определение параметров и расчет рабочих характеристик АД. Сл. 118
Перемещая точку Д от точкиследующие данные:
до точки М, записываем
121. Опытное определение параметров и расчет рабочих характеристик АД. Сл. 119
Рабочие характеристики асинхронного двигателя122. Пуск в ход асинхронных двигателей. Сл. 120
Пуск в ход асинхронных двигателей1. Пуск в ход двигателя с фазным ротором.
2. Пуск в ход короткозамкнутых двигателей.
3. Пуск в ход двигателей специального исполнения.
4. Сравнение пусковых и рабочих свойств асинхронных
двигателей.
Пуск – это совокупность операций, обеспечивающих
разгон ротора двигателя до необходимых оборотов.
При пуске s = 1,0.
123. Пуск в ход асинхронных двигателей. Сл. 121
Пуск АД с фазным роторомПусковые характеристики:
Мп
;
Мн
Iп
;
Iн
t
– время запуска
124. Пуск в ход асинхронных двигателей. Сл. 122
М п 0,9 М max ;1
I'2п I1п ;
I'2
U1ф
2
2
R '2 R 'доб .
R
X
X
'
1
2
1
S
.
Схема включения пускового реостата (а) и построение графика
пускового момента (б) асинхронного двигателя с фазным ротором
125. Пуск в ход асинхронных двигателей. Сл. 123
Влияние активного сопротивления обмотки ротора намеханическую характеристику асинхронного двигателя
126. Пуск в ход асинхронных двигателей. Сл. 124
Влияние сопротивления цепи ротора на ток, момент искольжение двигателя
127. Пуск в ход асинхронных двигателей. Сл. 125
Пуск в ход короткозамкнутых двигателейПри пуске короткозамкнутого двигателя решаются две
проблемы:
1. Обеспечить разгон.
2. Обеспечить минимальное воздействие на сеть.
M ПУСК M НАГР .
Разгон обеспечивается при:
Минимальное воздействие на сеть обеспечивается
снижением пускового тока.
U1
I ПУСК
;
ZK
I 2 П
U1
R1 R2 X 1 X 2
R1 R1e Rд ;
2
2
;
X 1 X 1e X д .
128. Пуск в ход асинхронных двигателей. Сл. 126
Пусковые характеристики:Мп
0 ,8...1 ,0 ;
Мн
Iп
7...10.
Iн
на
переключение обмотки статора с
R1
U1
I' 2 п I 1 п
R1 R' 2 Rk ;
R'2
X1
Y:
X'2
I'2п
I1п
Y
X 1 X' 2 X k ;
I1п
Z k Rk jX k ;
I1п
Δ
I1п
Δ
Y
U 1ф
Zk
Uл
;
3 Z k
U1л 3
;
Zk
3.
U 1 л U 1ф ;
129. Пуск в ход асинхронных двигателей. Сл. 127
Пуск в ход короткозамкнутых двигателейПри пуске короткозамкнутого двигателя решаются две
проблемы:
1. Обеспечить разгон.
2. Обеспечить минимальное воздействие на сеть.
Разгон обеспечивается при:
M ПУСК M НАГР .
Минимальное воздействие на сеть обеспечивается
снижением пускового тока:
I ПУСК
I 2 П
U1
.
ZK
U1
R1 R2 X 1 X 2
2
2
.
130. Пуск в ход асинхронных двигателей. Сл. 128
Пусковые характеристики:Мп
0 ,8...1 ,0 ;
Мн
Iп
7...10.
Iн
на
переключение обмотки статора с
R1
U1
I' 2 п I 1 п
R1 R' 2 Rk ;
R'2
X1
Y:
X'2
I'2п
I1п
Y
X 1 X' 2 X k ;
I1п
Z k Rk jX k ;
I1п
Δ
I1п
Δ
Y
U 1ф
Zk
Uл
;
3 Z k
U1л 3
;
Zk
3.
U 1 л U 1ф ;
131. Пуск в ход асинхронных двигателей. Сл. 129
Схема включения (а) и графики изменения момента и тока(фазного) при пуске (б) асинхронного двигателя с
короткозамкнутым ротором переключением обмотки статора со
звезды на треугольник
132. Пуск в ход асинхронных двигателей. Сл. 130
Схема реакторного (а) и автотрансформаторного (б) способовпуска асинхронных двигателей с короткозамкнутым ротором
133.
33
4
2
1
5
4
1
а
Снижение напряжения во время пуска:
б – автотрансформатором
а – индуктивным сопротивлением
б
134. Пуск в ход асинхронных двигателей. Сл. 132
Вспециальных
короткозамкнутых
двигателях
обеспечивается одновременное повышение пускового момента и
снижение пускового тока за счет изменения сопротивления
роторной цепи. Используется эффект вытеснения тока и его
влияние на активное и индуктивное сопротивление обмотки
ротора. Для усиления эффекта вытеснения используют
специальные формы пазов роторов.
Нормальные пазы
Глубокие пазы
Двойные (двухклеточные) пазы
135. Пуск в ход асинхронных двигателей. Сл. 133
Двухклеточный двигательР
При пуске
RП RP ;
XП XP .
+
+
+
+
П
136. Пуск в ход асинхронных двигателей. Сл. 134
Двухклеточный ротор:а – устройство; б – распределение плотности тока в рабочей и
пусковой клетках при пуске и работе двигателя
R1
R'П /S
X'П
R'Р /S
X'Р
X1
Xm
U1
Rm
137. Пуск в ход асинхронных двигателей. Сл. 135
MД
MП
MР
S
0
1,0
Механическая характеристика двухклеточного асинхронного
двигателя
138. Пуск в ход асинхронных двигателей. Сл. 136
Глубокопазный двигательРотор с глубокими пазами:
а – устройство; б – распределение плотности тока ротора по высоте
стержня при пуске и при работе двигателя
139. Пуск в ход асинхронных двигателей. Сл. 137
Бутылочная форма стержней ротораМ
S'
0
1,0
140. Пуск в ход асинхронных двигателей. Сл. 138
Схема замещения глубокопазного АДR1
X1
R'2 /S
Xm
U1
Rm
~
R2 f1 ( s );
~
X 2 f 2 ( s ).
X'2
141.
+Робоча обмотка
ф'
ф''
+
bпр
Формы паза двухклеточного
двигателя:
а – с двумя стержнями
б - с одним стержнем
bп
а
hпр
+
Пускова обмотка
б
Лінія основного потоку
а
Рис. Вытеснение тока в проводнике, который
находится в пазу: а – картина поля,
б – распределение плотности тока,
в – эквивалентный проводник при вытеснении тока
б
в
142. Пуск в ход асинхронных двигателей. Сл. 140
Сравнение механических характеристик АД с нормальными (Н)пазами на роторе, глубокопазных (Г) и с двойной клеткой (Д)
M
Д
Mнг
Mп
Г
Н
S
0
Sн
Пусковой ток
1,0
Пусковой момент
H - I П (7 8 ) І Н ;
Н - М П ( 0 ,7 1 ,1 ) М Н ;
Г - I П ( 5 7 ) І Н ;
Г - М П ( 1 ,1 1 ,6 ) М Н ;
Д - I П ( 4 5 ) І Н .
Д - М П ( 1 ,6 2 ,5 ) М Н .
143. Регулирование частоты вращения асинхронных двигателей. Сл. 141
Регулирование частоты вращенияасинхронных двигателей
1. Способы регулирования частоты вращения АД
2. Регулирование изменением скольжения.
3. Регулирование изменением частоты вращения поля
статора.
4. Многоскоростные асинхронные двигатели.
Способы регулирования
n n1 ( 1 S );
S
PЭЛ 2
60 f 1
; n1
;
PЭМ
p
Р ЭЛ 2 m 2 I 22 R2 ; PЭМ m2 E2 I 2 cos 2 m2 K U 1 I 2 cos 2 .
144. Регулирование частоты вращения асинхронных двигателей. Сл. 142
Регулирование изменением скольжения:1. Изменение R2 ;
2. Изменение
U1 .
M M НГ KФ Ф I 2 cos 2 ;
I R2
s
;
K U 1 cos 2
2
2
m1 I r2/
s
;
1 M
M НГ
I2
;
K Ф Ф cos 2
Ф
/2
2
U1
.
4 ,44 W1 K об f 1
145. Регулирование частоты вращения асинхронных двигателей. Сл. 143
Влияние напряжения на видмеханической характеристики асинхронного двигателя
146. Регулирование частоты вращения асинхронных двигателей. Сл. 144
Регулирование частоты вращенияизменением напряжения для исполнительных АД
147. Регулирование частоты вращения асинхронных двигателей. Сл. 145
Влияние активного сопротивления обмотки ротора намеханическую характеристику асинхронного двигателя
148. Регулирование частоты вращения асинхронных двигателей. Сл. 146
Механические характеристики (а) и схема включения (б)асинхронного двигателя при регулировании частоты вращения
изменением симметрии трехфазной системы
149. Регулирование частоты вращения асинхронных двигателей. Сл. 147
Регулирование изменением частоты вращения поля60 f 1
.
p
1. Изменение частоты f 1 .
n1
2. Изменение числа пар полюсов р.
150. Регулирование частоты вращения асинхронных двигателей. Сл. 148
Можно считать, чтоE1 U 1 4 ,44 Ф f 1 W1 kоб 1 ;
При Ф соnst :
U1
const ;
f1
nmax
20 30.
nmin
М ma х
const ;
При K м
Мн
M max
m1 p U 12 A U 12
;
2
4 f 1 хк
f1
A U 12
Kм 2
const ,
f1 M н
следовательно
U1
const .
f1
151. Регулирование частоты вращения асинхронных двигателей. Сл. 149
Многоскоростные двигателиСхемы включения обмотки статора на разное число полюсов
152. Регулирование частоты вращения асинхронных двигателей. Сл. 150
Схемы переключения числа полюсов и механическиехарактеристики в режимах постоянного момента (а) и
постоянной скорости (б)
153. Регулирование частоты вращения асинхронных двигателей. Сл. 151
154. Тормозные режимы асинхронных двигателей. Сл. 152
Тормозные режимы асинхронных двигателей1. Характеристики тормозных режимов.
2. Генераторное торможение.
3. Динамическое торможение.
4. Электромагнитный тормоз:
а) противовключение;
б) противовращение.
5. Асинхронный генератор.
155. Тормозные режимы асинхронных двигателей. Сл. 153
Генераторное торможениеn n1
Достоинства:
Недостатки:
1. Простота.
2. Экономичность.
1. Высокая частота вращения.
156. Тормозные режимы асинхронных двигателей. Сл. 154
Динамическое торможениеСхема ДТ
Достоинства:
Недостатки:
1. Простота.
2. Экономичность.
1. Необходим источник постоянного тока.
2. Отсутствие тормозного момента при n=0.
157. Тормозные режимы асинхронных двигателей. Сл. 155
Электромагнитный тормозДостоинства:
Недостатки:
1. Наиболее эффективный и надежный
способ торможения.
2. Возможность стопорения.
1. Неэкономичность.
158. Тормозные режимы асинхронных двигателей. Сл. 156
Круговая диаграмма АМПри переходе в генераторный режим реактивная мощность
не изменяет знака (т.е. остается потребляемой из сети) и идет
на создание основного поля машины Фо и полей рассеяния Ф 1
и Ф 2 .
Таким образом необходим источник реактивной энергии
(возбуждение). Таким источником может быть либо сеть, либо
индивидуальный
источник
(конденсаторная
батарея,
синхронный компенсатор).
159. Тормозные режимы асинхронных двигателей. Сл. 157
Активная энергия (мощность) поступает с вала машины и,обеспечив все механические и электрические потери, выходит
на зажимы статора. На схеме замещения асинхронной машины
скольжение s в генераторном режиме имеет отрицательный
знак и тем самым делает все сопротивление отрицательным
или генерирующим.
Если необходимо использовать асинхронный генератор при
отсутствии сети (за счет самовозбуждения) то используется
конденсаторная батарея как источник реактивной мощности.
Асинхронный генератор
с самовозбуждением
160. НЕСИМЕТРИЧНЫЕ РЕЖИМЫ РАБОТЫ АД
НЕСИМЕТРИЧНЫЕ РЕЖИМЫ РАБОТЫ АДКрайние случаи несимметрии:
1) Однофазный режим. При обрыве линейного провода АД
переходит в однофазный режим, при котором в зазоре
машины создается пульсирующее магнитное поле, которое по
методу симметричных составляющих можно разложить на два
поля: прямой и обратной последовательности. Скольжение
для поля прямой последовательности определяется также как
и для симметричного режима:
Sn р
n1 n2
.
n1
Скольжение для поля обратной последовательности:
Sобр
n1 n1 (1 S )
2 Sпр .
n1
161. НЕСИМЕТРИЧНЫЕ РЕЖИМЫ РАБОТЫ АД
Графики механических характеристик для поля прямой (Мпр)и обратной последовательности (Мобр) приведены на рис.
График результирующей механической характеристики (Мрез)
получается графическим суммированием Мрез = Мпр+ Мобр.
Mc
M
A
Mпр
Sн
1
Mрез
2
S
Mобр
Если обрыв линейного провода произошел на ходу, то при
том же моменте сопротивления растет скольжение, что приведет
к увеличению электрических потерь в роторе и перегреву ротора
и машины в целом.
162. НЕСИМЕТРИЧНЫЕ РЕЖИМЫ РАБОТЫ АД
Чтобы этого не происходило необходимо отключитьдвигатель с помощью специальных реле контроля обрыва фазы
или, если АД работает в ответственной установке (например, в
приводе насоса), необходимо снизить нагрузку АД на (30 – 50
)% Если обрыв линейного провода произошел до включения АД
в сеть, то после включения АД не сможет запуститься, так как
согласно результирующей механической характеристики при
пульсирующем поле пускового момента нет (М=0 при s =1).
2)
Работа при открытом треугольнике (обрыв внутри
треугольника).
Обмотка статора создает эллиптическое вращающееся поля и
механическая характеристика будет как на рисунке выше
(пунктиром).
Нужно снизить нагрузку на 15 –20 %. Пусковой момент есть.
163. НЕСИМЕТРИЧНЫЕ РЕЖИМЫ РАБОТЫ АД
3) Обрыв фазы ротораПри этом создается одноосный момент, который смещает
критическое скольжение:
Mрез
M
Mпр
Mc
0
0,5
Mобр
1 S
Pэл 2 s Pэм . Двигатель работает с половинной скоростью.
164. НЕСИМЕТРИЧНЫЕ РЕЖИМЫ РАБОТЫ АД
Работа АД в неноминальных режимаха) Изменение частоты питающего напряжения
Если U1 U1ном const ,
то при
U 1 E1
магнитный поток определяется из:
U1
Фm
.
4.44 f1 W1 K об
Электромагнитный вращающий момент:
M Cm Фm I 2 cos 2 ,
откуда ток ротора:
I2
M
.
Cm Ф m cos 2
Следовательно, изменение частоты приводит к изменению
магнитного потока
Ф m , тока ротора I 2 и нагрузочной
составляющей I 2' тока статора.
165. НЕСИМЕТРИЧНЫЕ РЕЖИМЫ РАБОТЫ АД
f1 Ф m I 0 cosУменьшение частоты f1 на 10%
Ф
вызывает увеличение тока I на 20 – 30%
0
Так как ток I 0 – практически реактивный,
это приводит к снижению cos .
При увеличении частоты
f1
I0
пропорционально увеличивается частота вращения ротора n 2.
Если АД работает по вентиляторной характеристике, то
нагрузочный момент возрастает в квадрате – кубе частоты. Это
приводит к увеличению тока ротора.
f1 n2 M C ( f 2 , f 3 ) Фm I 2
При возрастании f 1 на 10 %, ток ротора (по вентиляторной
характеристике) увеличивается примерно в 1,5 раза, приводит к
перегреву.
166. НЕСИМЕТРИЧНЫЕ РЕЖИМЫ РАБОТЫ АД
При неизменном нагрузочном моменте( M c const )
увеличение f 1снижает устойчивость АД, так как снижается
2
максимальный момент пропорциональный f1 .
M max
m1 U12
.
'
2 f1 ( x1 x2 ) L 2 f1
Частота не должна отличаться от номинальной на
б) Изменение подведенного напряжения
Пусть
f1 f н const;
M M ст const;
U1 0,8 U1н .
U 1 E1 I1 Z1;
I1 Z1 0
U 1 E1 4.44 f1 W1 Kоб1 Фm .
5%.
167. НЕСИМЕТРИЧНЫЕ РЕЖИМЫ РАБОТЫ АД
ФВ1
В
А
Фн
IОН IОА IОВ
IOA (25 40)% I1H ;
I OB 70% I1H для насыщенных АД
U1Н
U1
I1
I1н
1
-I'2н
Iо
I'2
2
I'2н
-I'2
E1=E'2
Iон
Фм
Фмн
168. НЕСИМЕТРИЧНЫЕ РЕЖИМЫ РАБОТЫ АД
Пусть U 1 увеличится на 20%M M ст const;
f1 f н const;
U 1 Фm I
I2
I1
M C mФm I 2 cos ψ 2 const
U1
U1Н
I1н
I1
1
-I'2
Iон
I'2н
2
I'2
-I'2н
E1=E'2
Iо
Фмн
Фм
169. Индукционный регулятор напряжения и фазорегулятор. Сл. 158
Индукционный регулятор напряжения ифазорегулятор
Индукционный
регулятор
напряжения
(ИР)
представляет собой асинхронную машину с фазным ротором,
предназначенную для плавного регулирования напряжения.
Рассмотрим
работу
трехфазного
ИР,
получившего
преимущественное
применение.
Ротор
ИР
заторможен
посредством червячной передачи, которая не только удерживает
его в заданном положении, но и позволяет плавно поворачивать
его относительно статора. Обмотки статора и ротора в ИР имеют
автотрансформаторную связь (рис. а), поэтому ИР иногда
называют поворотным автотрансформатором.
Напряжение сети U 1 подводится к обмотке ротора, при
этом ротор создает вращающееся магнитное поле, наводящее в
обмотке ротора ЭДС E 1 U 1 , а в обмотке статора – ЭДС E 2 .
170. Индукционный регулятор напряжения и фазорегулятор. Сл. 159
Схемы соединения индукционного регулятора напряжения (а) ифазорегулятора (б)
171. Индукционный регулятор напряжения и фазорегулятор. Сл. 160
Фазовый сдвиг этих ЭДС относительно друг друга зависитот взаимного пространственного положения осей обмоток
статора и ротора, определяемого углом . При 0 оси
обмоток совпадают, вращающееся поле одновременно
сцепляется с обеими обмотками и ЭДС E 1 и E 2 совпадают
по фазе ( при этом E 2 и U 1 находятся в противофазе ). При
180 эл. град. ЭДС E 1 и E 2 окажутся в противофазе (
E 2 и U 1 совпадают по фазе ). Если пренебречь внутренними
падениями напряжения, то напряжение на выходе ИР
определяется геометрической суммой:
U 2 U1 E2 .
При повороте ротора концы векторов E 2 и U описывают
2
U 2 изменяется
окружность ( рис. б ), при этом
от
U 2 max U 1 E 2 при
U 2 min U 1 E 2 при 0 до
180 эл. град.( рис. в). Поворот ротора осуществляется
либо вручную штурвалом, либо дистанционно включением
исполнительного двигателя.
172. Индукционный регулятор напряжения и фазорегулятор. Сл. 161
Векторные диаграммы индукционного регулятора напряженияИР применяются во всех случаях, где необходима плавная
регулировка
напряжения,
например
в
лабораторных
исследованиях.
173. Индукционный регулятор напряжения и фазорегулятор. Сл. 162
Фазорегулятор (ФР). Предназначен для изменения фазывторичного
напряжения
относительно
первичного
при
неизменном вторичном напряжении. В отличии от ИР обмотки
ротора и статора ФР электрически не соединены друг с другом,
т. е. имеют трансформаторную связь (смотри предыдущий
рисунок б), поэтому ФР иногда называют поворотным
трансформатором.
Изменение фазы вторичного напряжения осуществляется
поворотом ротора относительно статора. Первичной обмоткой в
ФР обычно является обмотка статора. Фазорегуляторы
применяются в устройствах автоматики (для фазового
управления) и измерительной технике (для поверки ваттметров
и счетчиков).
174. Асинхронный преобразователь частоты. Сл. 163
Асинхронный преобразователь частотыКак известно, частота тока в роторе асинхронной
машины зависит от скольжения ( f 2 s f 1 ). Это
свойство
асинхронных
машин
используется
в
асинхронных
преобразователях частоты (АПЧ).
Обмотку статора АПЧ подключают к трехфазной сети с
частотой f 1 , а ротор приводят во вращение приводным
двигателем (ПД) в направлении против вращения поля статора
(см. рис.). В этом случае в обмотке ротора наводится ЭДС E 2
частотой f 2 f 1 , так как скольжение s 1. Указанная ЭДС
через контактные кольца и щетки создает на выходе АПЧ
напряжение. Если требуется получить на выходе АПЧ
напряжение частотой f 2 f 1 , то ротор вращают в направлении
вращения поля статора с частотой вращения n2 n1 (при этом
s 1 ).
Мощность
на
выходе
АПЧ
складывается
из
электромагнитной мощности Pэм , передаваемой
в
обмотку
ротора вращающимся полем статора, и механической мощности
приводного двигателя PПД , т.е. P2 Pэм PПД .
175. Асинхронный преобразователь частоты. Сл. 164
Схема включения асинхронного преобразователя частотыСоотношение между мощностями Pэм и PПД зависит от
скольжения. Так, при работе АПЧ со скольжением s 2 эти
мощности равны и ротор половину мощности получает от
статора, а половину – от приводного двигателя.
176. Асинхронный преобразователь частоты. Сл. 165
При необходимости плавной регулировки частоты навыходе АПЧ в качестве приводного двигателя применяют
электродвигатель с плавной регулировкой частоты вращения,
например двигатель постоянного тока. Однако чаще всего АПЧ
используют для получения определенной частоты тока f 2 и в
качестве приводного применяют асинхронный или синхронный
двигатель.
177. Электрические машины синхронной связи. Сл. 166
Электрические машины синхронной связиВ современной технике часто возникает необходимость в
синхронизации вращения или поворота осей механизмов. Эта
задача успешно решается с помощью системы синхронной
связи.
Синхронной связью называют электрическую связь,
которая
обеспечивает
одновременное
вращение
или
одновременный поворот двух (или более) находящихся на
расстоянии друг от друга и механически не связанных валов.
Распространены два вида систем синхронной связи: система
«электрического
вала»
(синхронного
вращения)
–
трансформаторный режим и система «передачи угла»
(синхронного поворота) – индикаторный режим.
Системы электрического вала применяют для синхронного
(одновременного) вращения нескольких механизмов, имеющих
значительные нагрузочные моменты на валу. Для привода таких
механизмов применяют обычные асинхронные двигатели с
фазным ротором. При этом обмотки роторов электрически
соединяют друг с другом, а обмотки статоров включают в общую
сеть трехфазного тока.
178. Электрические машины синхронной связи. Сл. 167
Системы передачи угла (синхронного поворота) применяютдля дистанционного управления или контроля положения в
пространстве каких-либо устройств. Обычно такая система
выполняется на небольших асинхронных машинах (однофазных
или трехфазных), называемых сельсинами.
Наибольшее применение получили однофазные сельсины.
Такой сельсин имеет однофазную обмотку возбуждения и
трехфазную обмотку синхронизации, соединенную звездой.
Одна из обмоток располагается на роторе, а другая – на
статоре.
Простейшая
синхронная
передача,
называемая
индикаторной, содержит два сельсина: сельсин-датчик (СД) и
сельсин-приемник (СП) (см. рис.). При включении обмоток
возбуждения в сеть на напряжение U 1 в каждом из сельсинов
создается магнитный поток возбуждения . В обмотке синхронизации СД этот поток наводит ЭДС E Д , а в обмотке синхронизации СП – ЭДС EП . Эти ЭДС направлены встречно.
179. Электрические машины синхронной связи. Сл. 168
Если роторы СД и СП занимают одинаковые положенияотносительно своих статоров, то E Д E П и система находится
в равновесии. Если же ротор СД повернуть на некоторый угол Д ,
то ЭДС в обмотке синхронизации СД изменится, равенство ЭДС
нарушится ( E Д E П ) и в цепи синхронизации появится
результирующая ЭДС E E Д E П .
Схема синхронной передачи
180. Электрические машины синхронной связи. Сл. 169
Под действием этой результирующей ЭДС по обмоткамсинхронизации начинает протекать ток синхронизации:
Ic
ZД
E
,
ZП ZЛ
где Z Д , Z П и Z Л – сопротивления обмоток синхронизации
СД и СП и сопротивление линейных проводов.
Ток синхронизации датчика взаимодействует с потоком
возбуждения и создает на роторе СД электромагнитный момент,
направленный встречно повороту ротора датчика, т.е. момент,
противодействующий механизму, поворачивающему ротор СД на
заданный угол Д .
Ток синхронизации СП также взаимодействует с магнитным
потоком возбуждения и создает электромагнитный момент,
направленный в сторону поворота ротора СП. Под действием
этого момента, называемого синхронизирующим, ротор СП
займет такое же положение относительно статора, что и ротор
СД, и в системе восстановится равновесие, так как ЭДС E П и Е Д
станут одинаковыми.
181. Электрические машины синхронной связи. Сл. 170
Если ротор СД вновь повернуть на некоторый угол, то этотже угол поворота будет воспроизведен приемником. При
вращении ротора датчика ротор приемника также будет
вращаться с такой же частотой. Однако угол поворота,
установленный СД, воспроизводится ротором СП с некоторой
ошибкой – рассогласованием. Для поворота ротора приемника
необходимо, чтобы синхронизирующий момент, действующий на
этот
ротор,
преодолел
противодействующий
момент,
обусловленный силами трения в подшипниках и на контактных
кольцах, а иногда еще и полезной нагрузкой на валу приемника.
Ошибка в воспроизведении угла поворота оценивается углом
рассогласования
Д П .
Ротор СП синхронно следует за ротором СД, но угол
рассогласования между роторами сельсинов всегда имеется и
тем больше, чем больше противодействующий момент на валу
СП. Угол рассогласования обычно не превышает 2 ,5 0 , а
у
0
сельсинов высокой точности он не более 0 ,75 .
182. Электрические машины синхронной связи. Сл. 171
Значениеприемника
синхронизирующего
момента
на
роторе
M c M c max sin ,
где M c max – максимальное значение синхронизирующего
0
момента, соответствующее углу рассогласования 90 .
По конструкции сельсины разделяют на контактные, у
которых обмотка на роторе соединена с внешней цепью через
контактные кольца и щетки, и бесконтактные, не имеющие на
роторе обмоток.
Контактные сельсины в принципе не отличаются от
асинхронных двигателей с фазным ротором. На рисунке
показано устройство контактного сельсина. Статор 1 и ротор 2
этого сельсина неявнополюсные, и поэтому обе обмотки
сельсина распределенные. Наличие на роторе двух контактных
колец 3 указывает на расположение на роторе обмотки
возбуждения. Наличие контактных колец – основной недостаток
контактных сельсинов, так как это ведет к неустойчивости
параметров сельсина и снижению его надежности.
183. Электрические машины синхронной связи. Сл. 172
Устройство контактного сельсина184. Электрические машины синхронной связи. Сл. 173
Наиболеесовершенными
являются
бесконтактные
сельсины, разработанные А.Г. Иосифьяном и Д.В. Свечарником.
Эти сельсины не имеют скользящих контактов, так как их обе
обмотки расположены на статоре (см. рис.). Ротор 5
бесконтактного сельсина представляет собой цилиндр из
ферромагнитного
материала,
разделенный
немагнитной
прослойкой на две магнитно изолированные части – полюсы.
Алюминий, который заливают в ротор, является магнитной
изоляцией и одновременно материалом, скрепляющим части
ротора. С торцевых сторон сельсина расположены тороидальные
сердечники
1,
выполненные
из
тонколистовой
электротехнической стали. Внутренняя поверхность этих
сердечников расположена над ротором, а к их внешней
поверхности примыкают стержни внешнего магнитопровода 4.
Однофазную обмотку возбуждения сельсина выполняют в виде
двух дисковых катушек 2, расположенных с противоположных
сторон статора по оси сельсина между обмоткой синхронизации
3 и тороидальными сердечниками.
185. Электрические машины синхронной связи. Сл. 174
Конструктивная схема бесконтактного сельсина186. Электрические машины синхронной связи. Сл. 175
В процессе работы сельсина пульсирующий магнитныйпоток возбуждения замыкается в магнитной системе сельсина,
сцепляясь с трехфазной обмоткой синхронизации на статоре.
Путь замыкания потока показан на рисунке пунктирной линией.
Как видно из этого рисунка, магнитный поток, замыкаясь в
магнитопроводе, проходит через воздушный зазор четыре раза.
По этой причине для создания требуемого магнитного потока в
бесконтактном сельсине необходима значительная МДС. Это
является причиной повышенных габаритов бесконтактного
сельсина по сравнению с контактным.
187. Линейные асинхронные двигатели. Сл. 176
Линейные асинхронные двигателиПодвижная
часть
линейного
двигателя
совершает
поступательное движение, поэтому применение этих двигателей
для привода рабочих машин с поступательным движением рабочего
органа позволяет упростить кинематику механизмов, уменьшить
потери в передачах и повысить надежность механизма в целом.
Возможны
линейные
двигатели
четырех
видов:
электромагнитные
(соленоидные),
магнитоэлектрические
(с
применением постоянного магнита), электродинамические и
асинхронные. Асинхронные (индукционные) линейные двигатели
благодаря простоте конструкции и высокой надежности получили
наибольшее применение.
Для объяснения принципа работы линейного асинхронного
двигателя обратимся к асинхронному двигателю с вращательным
движением ротора. Если статор этого двигателя (рисунок а)
мысленно «разрезать» и «развернуть» так, чтобы он образовал дугу
с углом
(рисунок б), то диаметр ротора увеличится. При этом мы
получим асинхронный
двигатель с дуговым статором.
188. Линейные асинхронные двигатели. Сл. 177
К понятиям о дуговом и линейном двигателяхЧастота вращения (об/мин) магнитного поля статора этого
двигателя (синхронная частота)
n1 n
,
2
0
1
189. Линейные асинхронные двигатели. Сл. 178
Скорость бегущего поля в линейном двигателе:где
Lc
v1 2 f 1 f 1 ,
p
f 1 – частота тока в обмотке статора;
– полюсное деление;
Lc – длина статора (индуктора).
Принцип действия линейного асинхронного двигателя
основан на том, что бегущее поле индуктора , сцепляясь с
короткозамкнутой обмоткой вторичного элемента двигателя,
наводят в ней ЭДС. Возникающие в стержнях этой обмотки токи
взаимодействуют с бегущим полем индуктора и создают на
индукторе и вторичном элементе электромагнитные силы,
стремящиеся линейно переместить подвижную часть двигателя
относительно неподвижной. В некоторых конструкциях линейных
двигателей подвижной частью является индуктор, а в некоторых
– вторичный элемент, называемый в этом случае бегунком. Если
вторичный элемент линейного двигателя невозможно изготовить
с короткозамкнутой обмоткой, то применяют вторичные элементы
в виде полосы из меди, алюминия или ферромагнитной стали.
Наиболее удовлетворительными получаются характеристики
линейного двигателя при составном вторичном элементе,
например выполненном в виде полосы из ферромагнитной
стали, покрытой слоем меди.
190. Линейные асинхронные двигатели. Сл. 179
Основнойнедостаток
асинхронных
двигателей
с
разомкнутым статором – дуговых и линейных – явление краевого
эффекта, представляющего собой комплекс электромагнитных
процессов, обусловленных разомкнутой конструкцией статора. К
нежелательным последствиям краевого эффекта в первую
очередь следует отнести появление «паразитных» тормозных
усилий, направленных против движения подвижной части
двигателя, и возникновение поперечных сил, стремящихся
сместить подвижную часть двигателя в поперечном направлении.
Кроме того, краевой эффект вызывает ряд других нежелательных
явлений, ухудшающих рабочие характеристики линейных
двигателей.
Линейные асинхронные двигатели применяют для привода
заслонок,
ленточных
конвейеров,
подъемно-транспортных
механизмов. На рисунке показано устройство линейного
асинхронного двигателя привода тележки подъемного крана. На
тележке 3 расположен индуктор линейного двигателя, состоящий
из шихтованного сердечника 6, в пазах которого расположена
обмотка 5. Направляющая для колес 2 представляет собой
стальную балку 1, к нижней части которой прикреплена стальная
полоса 4.
191. Линейные асинхронные двигатели. Сл. 180
Линейный асинхронный двигатель привода подъемного крана:1 – стальная балка; 2 – колеса-катки; 3 – тележка; 4 – алюминиевая
полоса; 5 – обмотка индуктора; 6 – шихтованный сердечник
192. Линейные асинхронные двигатели. Сл. 181
Бегущее магнитное поле индуктора наводит в стальнойполосе 4 вихревые токи. Электромагнитные силы возникающие
в результате взаимодействия этих токов с магнитным полем
индуктора, перемещают индуктор (тележку) вдоль стальной
полосы 4.
Линейные асинхронные двигатели значительной мощности
применяют на транспорте в качестве тяговых двигателей. Один
из вариантов такого двигателя показан на рисунке. Здесь
индуктор 2 двигателя подвешен к транспортному средству 1, а
стальная полоса 3 установлена вертикально на основании пути
Fn ,
между рельсами. В этой конструкции поперечная сила
вызванная краевым эффектом, используется полезно, так как
она уменьшает силу давления на несущие оси и колеса и, как
следствие, уменьшает трение качения.
193. Линейные асинхронные двигатели. Сл. 182
Линейный асинхронный двигатель привода железнодорожноготранспортного средства
194. НЕСИМЕТРИЧНЫЕ РЕЖИМЫ РАБОТЫ АД
НЕСИМЕТРИЧНЫЕ РЕЖИМЫ РАБОТЫ АДКрайние случаи несимметрии:
Однофазный режим. При обрыве линейного провода АД
переходит в однофазный режим, при котором в зазоре
машины создается пульсирующее магнитное поле, которое по
методу симметричных составляющих можно разложить на два
поля: прямой и обратной последовательности. Скольжение
для поля прямой последовательности определяется также как
и для симметричного режима:
Sn р
n1 n2
.
n1
Скольжение для поля обратной последовательности:
Sобр
n1 n1 (1 S )
2 Sпр .
n1
Графики механических характеристик для поля прямой (Мпр)
и обратной последовательности (Мобр) приведены на рис.
График результирующей механической характеристики (Мрез)
получается графическим суммированием
Мрез
= Мпр+ Мобр
195. НЕСИМЕТРИЧНЫЕ РЕЖИМЫ РАБОТЫ АД
McM
A
Mпр
Sн
1
Mрез
2
S
Mобр
Если обрыв линейного провода произошел на ходу, то при
том же моменте сопротивления растет скольжение, что
приведет к увеличению электрических потерь в роторе и
перегреву ротора и машины в целом. Чтобы этого не
происходило необходимо отключить двигатель с помощью
специальных реле контроля обрыва фазы или, если АД
работает в ответственной установке (например, в приводе
насоса), необходимо снизить нагрузку АД на (30 – 50 )% Если
обрыв линейного провода произошел до включения АД в сеть,
то после включения АД не сможет запуститься, так как согласно
результирующей
механической
характеристики
при
пульсирующем поле пускового момента нет (М=0 при s =1).
196. НЕСИМЕТРИЧНЫЕ РЕЖИМЫ РАБОТЫ АД
Работа при открытом треугольнике (обрыв внутритреугольника). Обмотка статора создает эллиптическое
вращающееся поля и механическая характеристика будет как на
рисунке выше (пунктиром).
Нужно снизить нагрузку на 15 –20 %. Пусковой момент есть.
Обрыв фазы ротора. При этом создается одноосный момент,
который смещает критическое скольжение:
Mрез
M
Mпр
Mc
0
Pэл 2 s Pэм .
0,5
Mобр
1 S
Двигатель работает с половинной скоростью.
197. Работа АД в неноминальных режимах
Работа АД в неноминальных режимаха) Изменение частоты питающего напряжения
Если U1 U1ном const.
U1
Пусть U1 E1 , тогда
Фm
4.44 f1 W1 K об
;
M Cm Фm I 2 cos 2 ;
M
I2
.
Cm Ф m cos 2
Следовательно, изменение частоты приводит к изменению Ф m,
тока ротора I и нагрузочной составляющей I 2' тока статора
2
f1 Ф m I 0 cos
Уменьшение частоты на 10%
вызывает увеличение тока I 0на 20 – 30%.
Так как I – практически реактивный,
0
это приводит к снижению cos .
Ф
I0
198. Работа АД в неноминальных режимах
При увеличении частоты f 1 пропорционально увеличивается частота вращения ротора n2 . Если АД работает повентиляторной характеристике, то нагрузочный момент
возрастает в квадрате – кубе частоты. Это приводит к
увеличению тока ротора.
f1 n2 M C ( f 2 , f 3 ) Фm I 2
При возрастании f 1 на 10 %, ток ротора (по вентиляторной
характеристике) увеличивается примерно в 1,5 раза, приводит к
перегреву.
При неизменном нагрузочном моменте ( M c const ) увелиf 1 снижает устойчивость АД, так как снижается
чение
2
максимальный момент пропорциональный f1 .
M max
m1 U12
.
'
2 f1 ( x1 x2 ) L 2 f1
Частота не должна отличаться от номинальной на
5%.
199. Работа АД в неноминальных режимах
б) изменение подведенного напряженияПусть f1 f н const;
U1
M M ст const;
U1 0,8 U1н ;
U 1 E1 I1 Z1;
I1 Z1 0
U 1 E1 4.44 f1 W1 Kоб1 Фm .
Ф
В
Фн
А
насыщенных АД
IОН IОА IОВ
В1
IOA (25 40)% I1H ;
IOB 70% I1H для
200. Работа АД в неноминальных режимах
U1НU1
I1
I1н
1
-I'2н
Iо
I'2
2
I'2н
Фм
Iон
Фмн
E1=E'2
Пусть увеличится на 20%
f1 f н const;
-I'2
U 1 Фm I
M M ст const;
M C mФm I 2 cos ψ 2 const
I2
I1
201. Работа АД в неноминальных режимах
U1U1Н
I1н
I1
1
-I'2
Iон
I'2н
2
I'2
-I'2н
E1=E'2
Iо
Фмн
Фм
202. Асинхронные двигатели малой мощности. Сл. 183
Асинхронные двигатели малой мощности1). Общие сведения:
PН – до 500 Вт, 3-х и 1-фазные.
Создание пускового момента в однофазном двигателе:
203. Асинхронные двигатели малой мощности. Сл. 184
2). Однофазные АД.M ПУЛ М ПР М ОБР ;
nпр побр
S ПР
SОБР
60 f 1
п1
;
p
n1 n2
n1
n1 n2 2n1 n1 n2
2 S ПР
n1
n1
f 2 пр f 1 sпр ;
f 2ооб f 1 sобр f 1 ( 2 sпр ).
204. Асинхронные двигатели малой мощности. Сл. 185
Схема включения однофазного асинхронного двигателяРазложение пульсирующего магнитного потока на два вращающихся
205. Асинхронные двигатели малой мощности. Сл. 186
Механические характеристики однофазногоасинхронного двигателя
206. Асинхронные двигатели малой мощности. Сл. 187
Механические характеристики однофазногоасинхронного двигателя
207. Асинхронные двигатели малой мощности. Сл. 188
Векторные диаграммы однофазных АД208. Асинхронные двигатели малой мощности. Сл. 189
Конденсаторный двигательР – разомкнут
FР FП ; F П jF Р .
I П W П К ОБ .П j I P W P К ОБ .Р ;
W P К ОБ .Р
IП j
IР ,
W П К ОБ .П
К
где
W P К ОБ .Р
К
.
W П К ОБ .П
I I P I П ; U U P U П U C .
209. Асинхронные двигатели малой мощности. Сл. 190
Cp ?UP
UC
;
cos P
IП
U C I П xC
;
CP
IП
I П cos P
I П cos P
CP
.
UC
U P
2 f U
K
UП
tg P .
UP
C n 2 ,5 C p ; U C U 2 U П2 U 1 K 2 .
IР
І П
Изменение нагрузки : var, поле эллиптическое.
Р
П
210. Асинхронные двигатели малой мощности. Сл. 191
Механическая характеристикаконденсаторного асинхронного двигателя
211. Асинхронные двигатели малой мощности. Сл. 192
Схема однофазного асинхронного двигателяс пусковой обмоткой
212. Асинхронные двигатели малой мощности. Сл. 193
Получение вращающегося магнитного полядвухфазной системой токов
213. Асинхронные двигатели малой мощности. Сл. 194
Сравнение свойств фазосмещающих элементов:а – активное сопротивление; б – индуктивность; в – емкость; г –
механические характеристики двигателя при различных
фазосмещающих элементах; 1 – активное сопротивление; 2 емкость
214. Асинхронные двигатели малой мощности. Сл. 195
Конденсаторный двигатель:а – с рабочей емкостью; б – с рабочей и пусковой емкостями; в
– механические характеристики; 1 – при рабочей емкости; 2 –
при рабочей и пусковой емкостях
215. Асинхронные двигатели малой мощности. Сл. 196
Схема включения двухфазного двигателя в трехфазную сеть216. Асинхронные двигатели малой мощности. Сл. 197
Схемы соединения обмотки статора трехфазного асинхронногодвигателя при включении его в однофазную сеть
217. Асинхронные двигатели малой мощности. Сл. 198
Схемы соединения обмотки статора трехфазного асинхронногодвигателя при включении его в однофазную сеть
218. Асинхронные двигатели малой мощности. Сл. 199
Схемы соединения обмотки статора трехфазного асинхронногодвигателя при включении его в однофазную сеть
1,6 2,0
M
П
Серия УАД – схемы 1 и 2.
М Н 1,0 1,5
С П СР
RП
219. Асинхронные двигатели малой мощности. Сл. 200
Двигатель с экранированными полюсамиФ
' Ф
"
Ф
Ф
" Ф
Ф
Э
К
220. Асинхронные двигатели малой мощности. Сл. 201
Однофазный двигательс экранированными полюсами
Для создания пускового момента в асинхронных двигателях
малой мощности применяют конструкцию с явно выраженными
экранированными полюсами (рис. а), на которых располагают
однофазную обмотку. Полюсы 1 имеют расщепленную на две
части конструкцию, при этом на одну из частей каждого полюса
надет короткозамкнутый виток (экран) в виде медного кольца 2.
Ротор двигателя короткозамкнутый.
При включении обмотки статора в сеть пульсирующий поток
наводит в короткозакнутом витке (экране) ток, препятствующий
нарастанию магнитного потока в этой части полюса (рис. б). В
результате потоки в обеих частях каждого полюса оказываются
сдвинутыми по фазе относительно друг друга, что приводит к
образованию в двигателе вращающегося магнитного поля.
221. Асинхронные двигатели малой мощности. Сл. 202
Асинхронный двигатель с экранированными полюсами222. Асинхронные двигатели малой мощности. Сл. 203
Асинхронные двигатели с экранированными полюсаминереверсивны – ротор всегда всегда вращается в направлении
от неэкранированной части полюса к экранированной. Обычно
эти двигатели изготовляются мощностью не более 100 Вт и
применяют для привода устройств, не требующих большого
пускового
момента
(электропривод
вентиляторов,
электропроигрывателей
и
т.
пр.).
Промышленностью
изготовляются асинхронные двигатели с экранированными
полюсами серии АД…Е, предназначенные для привода
приборов с вентиляторной нагрузкой. Эти двигатели мощностью
от 2,5 до 25 Вт рассчитаны на работу от сети напряжением 220
В частотой 50 Гц. Кратность пускового момента этих двигателей
M n / M ном 0 ,5 0 ,6.
223. Асинхронные исполнительные двигатели. Сл. 204
Асинхронные исполнительные двигателиВ системах управления, регулирования и контроля
широко применяются управляемые электродвигатели небольшой
мощности. С помощью этих двигателей осуществляется
преобразование электрического сигнала в механическое
перемещение – вращение вала. Такие электродвигатели
называют исполнительными (ИД).
Характер требований, предъявляемых к исполнительным
двигателям, определяется спецификой их работы: частые пуски,
реверсы, постоянно изменяющаяся частота вращения. Основные
требования – отсутствие самохода, т.е. самоторможение при
снятии сигнала управления; широкий диапазон регулирования
частоты вращения; линейность характеристик; большой пусковой
момент;
малая
мощность
управления;
быстродействие
(малоинерционность).
224. Асинхронные исполнительные двигатели. Сл. 205
На статоре асинхронного исполнительного двигателярасположена двухфазная обмотка. Одна из фазных обмоток –
обмотка возбуждения (ОВ) – постоянно включена в сеть с
напряжением U 1 , а на другую – обмотку управления (ОУ) –
напряжение (сигнал управления) U c подается
лишь
при
необходимости включения двигателя.
Схема включения асинхронного исполнительного двигателя
225. Асинхронные исполнительные двигатели. Сл. 206
Для работы двухфазного ИД необходимо вращающеесямагнитное поле, непременным условием возникновения которого
является наличие пространственного и временного сдвигов
между МДС фазных обмоток статора. Пространственный сдвиг
указанных МДС обеспечивается конструкцией обмотки статора,
при которой оси фазных обмоток сдвинуты в пространстве
относительно друг друга обычно на угол 90 эл. град. Временной
(фазный) сдвиг МДС создается либо питанием обмотки статора
двухфазной системой напряжений, либо включением в цепь ОУ
фазовращателя – устройства, позволяющего получать различные
фазовые сдвиги напряжения на его выходе относительно
напряжения на входе, т.е. относительно напряжения на обмотке
возбуждения, либо включением последовательно в цепь ОВ
емкости С.
Последний способ включения ИД применяют наиболее
часто. Обычно значение емкости С выбивают из условия
получения кругового поля при пуске двигателя. По окончании
пускового периода двигатель работает с эллиптическим
вращающимся полем.
226. Асинхронные исполнительные двигатели. Сл. 207
Конструкция ротора:- короткозамкнутый;
- полый немагнитный;
- полый ферромагнитный;
- массивный ферромагнитный.
Способы управления
Различают три основных способа управления: амплитудное,
фазовое
и
амплитудно-фазовое.
При
амплитудном
управлении изменяется только амплитуда напряжения
управления или пропорциональное ей действующее значение
U y этого напряжения. Векторы напряжений управления и
Uy
возбуждения при всех значениях напряжения
образуют
угол
0
(рис. 1).
90
Напряжение управления обычно выражают в относительных
единицах, как отношение U y к напряжению возбуждения U B ,
приведенному к числу витков обмотки управления. Это
отношение называют эффективным коэффициентом сигнала
U / U / k U / U ,
e
y
где U B/ U B ( w y / wB );
трансформации.
B
y
k wB / w y
B
- коэффициент
227. Асинхронные исполнительные двигатели. Сл. 208
Фазовое управление характерно тем, что напряжениеуправления остается неизменным по величине и равным , а
регулирование частоты вращения достигается путем изменения
угла сдвига фаз между векторами напряжений возбуждения и
управления (рис. 2). За коэффициент сигнала при фазовом
управлении принимается синус угла сдвига фаз
между
векторами напряжений U y и U B , т.е. sin .
При амплитудно-фазовом управлении изменяется как
амплитуда напряжения управления, так и угол сдвига фаз между
напряжениями U y и U B , подаваемыми на обмотки статора.
В процессе управления двигателем изменяют сигнал U c на
ОУ, при этом меняется как значение (амплитуда) МДС этой
обмотки, так и ее фазовый сдвиг относительно МДС обмотки
возбуждения. Поэтому рассматриваемый способ управления ИД
называют амплитудно-фазовым.
228. Асинхронные исполнительные двигатели. Сл. 209
1. Амплитудное2. Фазовое
U1=UB
ФЭ
на 900
ОВ
Фазовращатель
ОВ
ОУ
ОУ
229. Асинхронные исполнительные двигатели. Сл. 210
3. Амплитудно-фазовое управлениеC
UB
ОВ
UУ
ОУ
UB
в=var
UУ=var
230. Асинхронные исполнительные двигатели. Сл. 211
При всех методах управления частота вращенияасинхронного двигателя изменяется за счет образования
несимметричного эллиптического магнитного поля, которое
можно представить в виде двух круговых вращающихся полей
прямой
и
обратной
последовательностей.
Изменение
напряжения на обмотке управления по величине или фазе
приводит к изменению соотношений между амплитудами
потоков прямой и обратной последовательностей. В связи с
этим изменяется вид механической характеристики, а
следовательно, и частота вращения двигателя. Уменьшение
частоты вращения достигают путем увеличения эллиптичности
магнитного поля, т.е. путем увеличения поля обратной
последовательности, которое создает тормозной момент.
Однако при этом возрастают и потери мощности в двигателе.
231. Асинхронные исполнительные двигатели. Сл. 212
Одно из основных требований к ИД – отсутствие самохода.Самоход бывает параметрический и технологический. Известно,
что обычные асинхронные двигатели имеют небольшое активное
сопротивление обмотки ротора и работают с малым критическим
скольжением. Такие двигатели непригодны в качестве
исполнительных, так как они обладают самоходом, т.е. при
снятии сигнала управления двигатель будет продолжать работать
как однофазный. Это иллюстрирует рисунок а, на котором точка
А определяет режим работы двигателя с нагрузочным моментом
M ном управления. При снятии сигнала
при наличии сигнала
управления поле статора становится пульсирующим (обмотка
возбуждения постоянно включена в сеть) и режим работы
двигателя определяется точкой В на
характеристике
однофазного двигателя. При этом электромагнитный момент
двигателя останется положительным.
232. Асинхронные исполнительные двигатели. Сл. 213
Устранение самохода в асинхронном исполнительном двигателе233. Асинхронные исполнительные двигатели. Сл. 214
Если же увеличить активное сопротивление ротора, то формакривых прямого M пр обратного M обр и результирующего
М M пр M обр
моментов изменится (рисунок б): максимум
моментов M пр и M обр сместятся
в
область
больших
скольжений ( sкр 1 ). Теперь после прекращения сигнала
управления, т.е. при переходе двигателя в однофазный режим,
электромагнитный момент становится отрицательным MT
(точка В) и оказывает на ротор тормозящее действие, не
допуская самохода. Критерий отсутствия самохода:
r2/
Sm
1;
XK
( S m 4 7).
К
исполнительным двигателям предъявляется также
требование малоинерционности (быстродействия), т.е. при
подаче сигнала управления ротор двигателя должен очень
быстро
достигать
установившейся
частоты
вращения.
Выполнению этого требования способствуют увеличение
пускового момента, уменьшение синхронной частоты вращения
поля статора и снижение момента инерции ротора. При
повышенных частотах питающего напряжения (больших
синхронных частотах вращения) ИД с ротором обычной
(короткозамкнутой) конструкции из-за значительного момента
инерции последнего не обладает требуемым быстродействием.
234. Асинхронные исполнительные двигатели. Сл. 215
В этом случае применяют асинхронные исполнительныедвигатели с полым немагнитным ротором. Полый немагнитный
ротор представляет собой тонкостенный алюминиевый стакан 2,
что, с одной стороны, обеспечивает ротору повышенное активное
сопротивление, а с другой – весьма небольшой момент инерции.
Асинхронный двигатель с полым немагнитным ротором:
1 – внешний статор; 2 – стакан ротора; 3 – внутренний статор;
4 – обмотка статора; 5 – вал; 6 – втулка крепления стакана ротора
235. Асинхронные исполнительные двигатели. Сл. 216
Двигатель имеет два статора: внешний 1 с обмоткой ивнутренний 3 без обмотки, входящий внутрь полого стакана
ротора. Внутренний статор необходим для уменьшения
магнитного сопротивления основному магнитному потоку.
1 2 0 ,15 0 ,25 мм;
стенки 0 ,2 1 мм ;
нм 0 ,5 1,5 мм .
Если
PH 1,5 Вт – обмотка на внутреннем статоре.
По сравнению с исполнительными двигателями обычной
конструкции двигатели с полым немагнитным ротором имеют
повышенные габариты и невысокий КПД. Это объясняется
повышенным зазором между наружным и внутренним
статорами, который складывается из толщины стенки стакана
ротора и двух воздушных зазоров. Как известно, увеличение
воздушного зазора способствует росту намагничивающего тока
двигателя и снижению его КПД.
236. Асинхронные исполнительные двигатели. Сл. 217
Конструкция асинхронного исполнительного двигателяс полым немагнитным ротором
1
2
3
4
6
5
1 – внешний статор;
2 – двухфазная обмотка статора (обмотка возбуждения к
управлению);
3 – магнитопровод внутреннего статора (неподвижный);
4 – вал с закрепленным полым немагнитным алюминиевым
стаканом 5;
6 – корпус статора.
237. Асинхронные исполнительные двигатели. Сл. 218
Характеристики АИД с амплитудным управлениемСистема относительных единиц.
Базовые величины:
1) M по – пусковой момент при круговом вращающемся поле;
2) n1
60 f 1
– синхронная частота вращающегося поля;
p
3) UУ ном – обеспечивает круговое поле при пуске;
4) Pпуск .0 – мощность при круговом вращающемся поле.
Механические характеристики
m f ( ) при const .
n
;
n1
M
m
.
M пуск 0
238. Асинхронные исполнительные двигатели. Сл. 219
Уравнение момента АИД в относительных единицах:m э 0 ,5 ( 1 2э ) .
Уравнение механической
уравнения момента:
характеристики
получим
из
2 ( э m )
.
2
1 э
Для построения механических характеристик задаем
значение " m" при постоянном коэффициенте сигнала " ".
Для построения регулировочных характеристик
задаем значение " э" при m const (m 0; 0,25;
f ( э )
и т. д.)
239. Асинхронные исполнительные двигатели. Сл. 219
m1,0
0,8
0,6 0,75
0,4 0,50
0,2
э 1,0
0,25
0
0,2 0,4 0,6 0,8 1,0
Механические характеристики АИД при амплитудном управлении
UУ
U возб
–
коэффициент сигнала;
α sinβ , e , 0 .
240. Асинхронные исполнительные двигатели. Сл. 220
Регулировочные характеристикиf ( );
e
U/
m const .
UУ
– эффективный коэффициент сигнала.
U возб
возб
U возб
,
K
где К – коэффициент трансформации;
Wвозб K обм. В
K
.
W упр K обм.У
241. Асинхронные исполнительные двигатели. Сл. 221
1,00,8
0,6
0,4
0,2
0
m=0
0,25
0,50
0,75
0,2 0,4 0,6 0,8 1,0 э
242. Асинхронные исполнительные двигатели. Сл. 221
Характеристики АИД с фазовым управлениемЕсли сделать допущение, что k 1 ,
механической характеристики упрощается:
то уравнение
sin m .
Тогда
графики
механических
характеристик
f ( m ) представляются в виде прямых линий.
Если
kто для
1 , реального двигателя графики характеристик
будут искривляться также, как для двигателя с амплитудным
управлением.
243. Асинхронный тахогенератор. Сл. 222
Асинхронный тахогенераторUB ФВ
ОВ
EТР
n
ОГ
Фа
IВЫХ
EВР
UBЫХ
Фd
Zнг
При вращении:
244. Асинхронный тахогенератор. Сл. 223
Выходная характеристика:f вых f сети ;
Евых c n ;
U f ( n );
U ВЫХ Е ВЫХ I ВЫХ Z Г
1. Амплитудная погрешность U %
2. Фазовая погрешность.
Для уменьшения U:
nН
n1
0,2 0,5
:
ΔU
0,5 0,7
U 100%
.
E ВЫХMAX
0,05 0,1% Т Г высокой точн.
:
0,2 2,5% Т Г след. систем. и для изм. n