






































 electronics
electronicsSimilar presentations:










Типы электрических машин. Лекция 1
1. Типы электрических машин
1.Электрические машины переменного токаСинхронные машины: генераторы,
двигатели, компенсаторы.
Асинхронные машины: двигатели
2.Электрические машины постоянного тока
Двигатели и генераторы
2.
Асинхронные машины(асинхронные двигатели)
3.
95% приводовпроизводственных механизмов
имеют в своем составе
асинхронный двигатель
(насосно-компрессорные, кузнечнопрессовые, подъемно-транспортные
системы; устройства
электропривода станков;
медицинское оборудование и
бытовые приборы)
4. Асинхронные машины:
Асинхронная машина — это электрическая машинапеременного тока, частота вращения ротора которой не
равна (в двигательном режиме меньше) частоте вращения
магнитного поля, создаваемого током обмотки статора.
Второе название асинхронных
машин — индукционные
вследствие того, что ток в
обмотке ротора индуцируется
вращающимся полем статора.
5.
Достоинства:• простота конструкции
• низкая себестоимость
• надежность (нет легко повреждающихся частей)
• высокий срок службы
• высокий пусковой момент
• высокая перегрузочная способность
• может работать с длительной перегрузкой, допускает частые пуски и
реверсы
Основной недостаток - сложность регулирования частоты вращения
.
6. История создания асинхронных машин:
Приоритет в создании асинхронного двигателяпринадлежит Николе Тесла, который в Будапеште
весной 1882 г. решил проблему создания вращающегося
магнитного поля при помощи неподвижной многофазной
обмотки переменного тока, а в 1884 г. в Страсбурге
продемонстрировал
действующую
модель
своего
двигателя.
Ни́кола Тесла
(1856-1943) — физик,
инженер, изобретатель
в области
электротехники и
радиотехники.
7. История создания асинхронных машин:
Вклад в развитие асинхронныхдвигателей внес Галилео Феррарис,
который в 1885 г. в Италии построил
модель
асинхронного
двигателя
мощностью 3 Вт.
Заслуга Феррариса в том, что сделав
ошибочный вывод о небольшом к.п.д.
асинхронного двигателя и о
нецелесообразности применения
систем переменного тока, он привлек
внимание многих инженеров к
проблеме совершенствования
асинхронных машин.
Галилер Феррарис
(1847 -1897),
Итальянский физик и
инженер-электрик.
8. История создания асинхронных машин:
В 1889 г. Доливо-Добровольскийполучил
патент
на
трехфазный
асинхронный
двигатель
с
короткозамкнутым
ротором
типа
«беличья клетка», а в 1890 г. —
патенты в Англии и Германии на
трёхфазный асинхронный двигатель с
фазным ротором.
Михаил Осипович Доли́воДоброво́льский (1861-1919) — русский
электротехник польского
происхождения, один из создателей
техники трёхфазного переменного
тока, немецкий предприниматель.
9.
Мощность асинхронных двигателейсоставляет от десятков мегаватт до
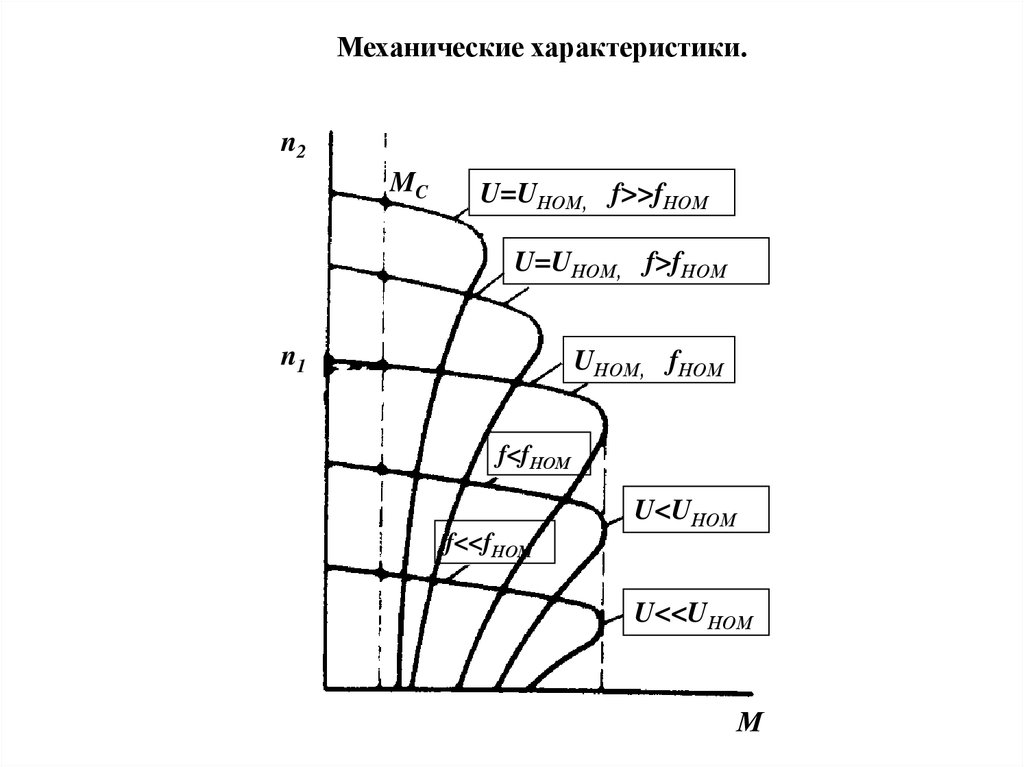
долей ватт.
Выпускаются двигатели в виде серий,
охватывающих определенный набор
мощностей, частот вращения и
напряжений. Машины одной серии
имеют общее конструктивное
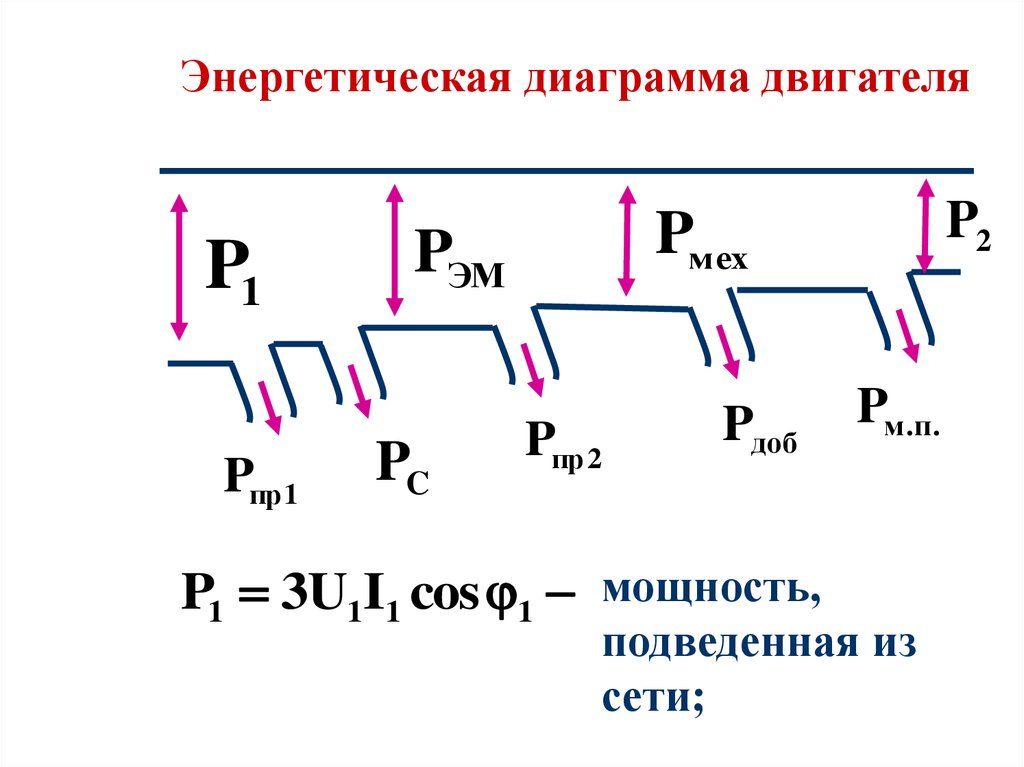
решение, технологию изготовления и
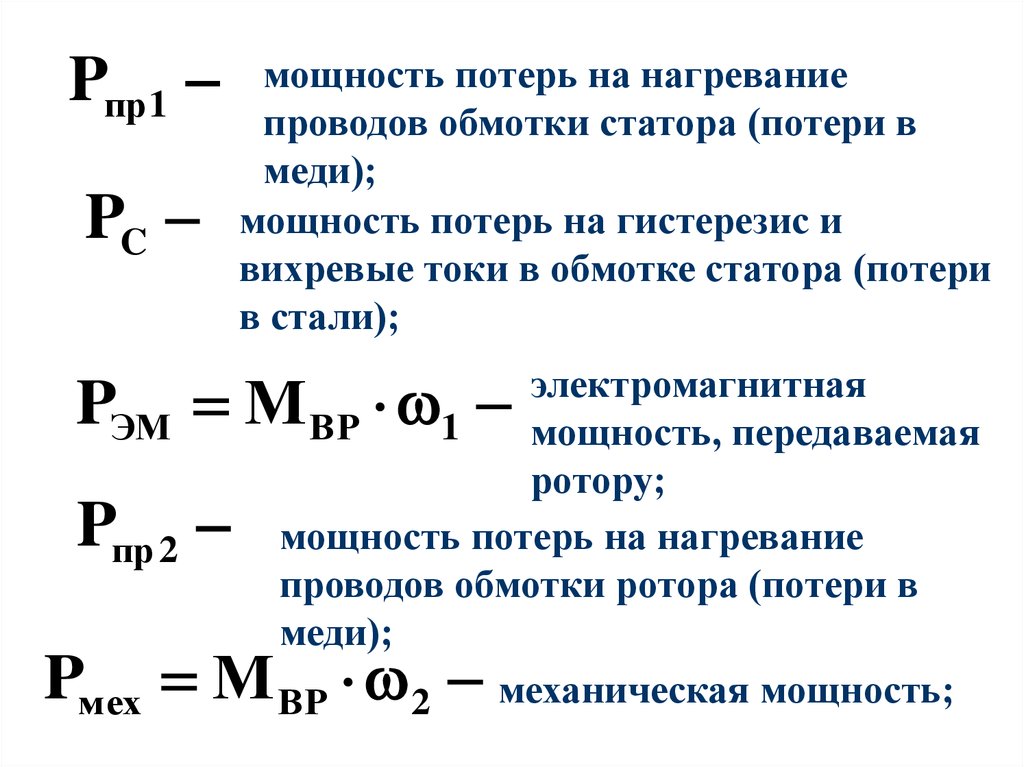
однотипность материалов (4А от
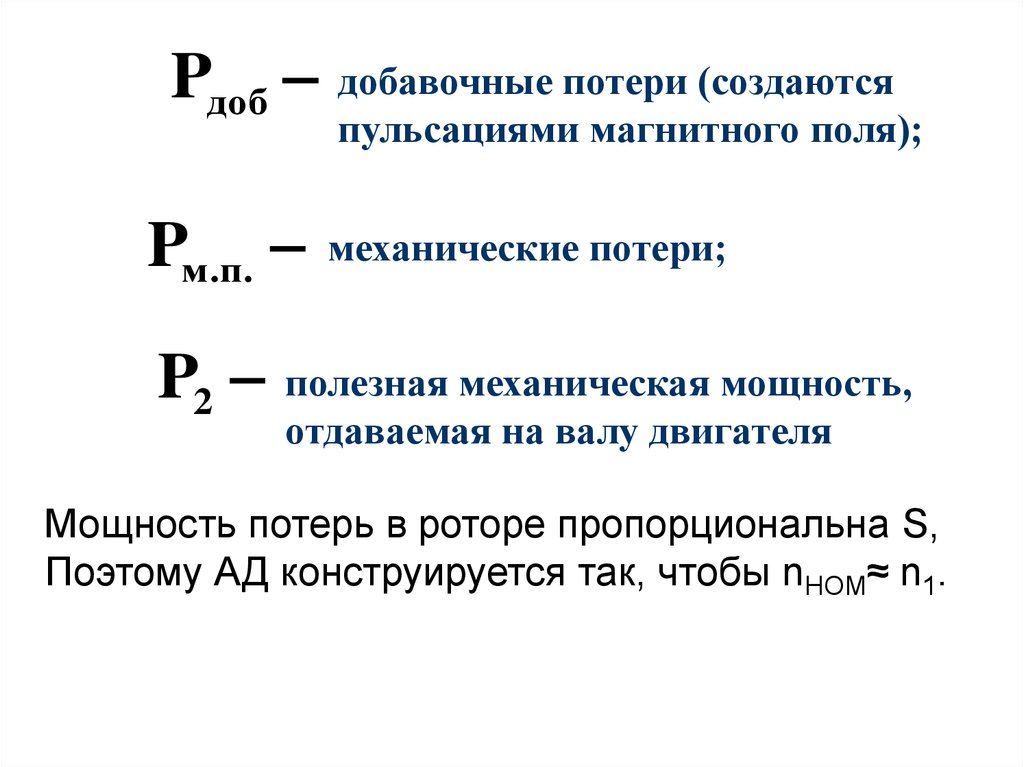
0,06до 400 кВт).
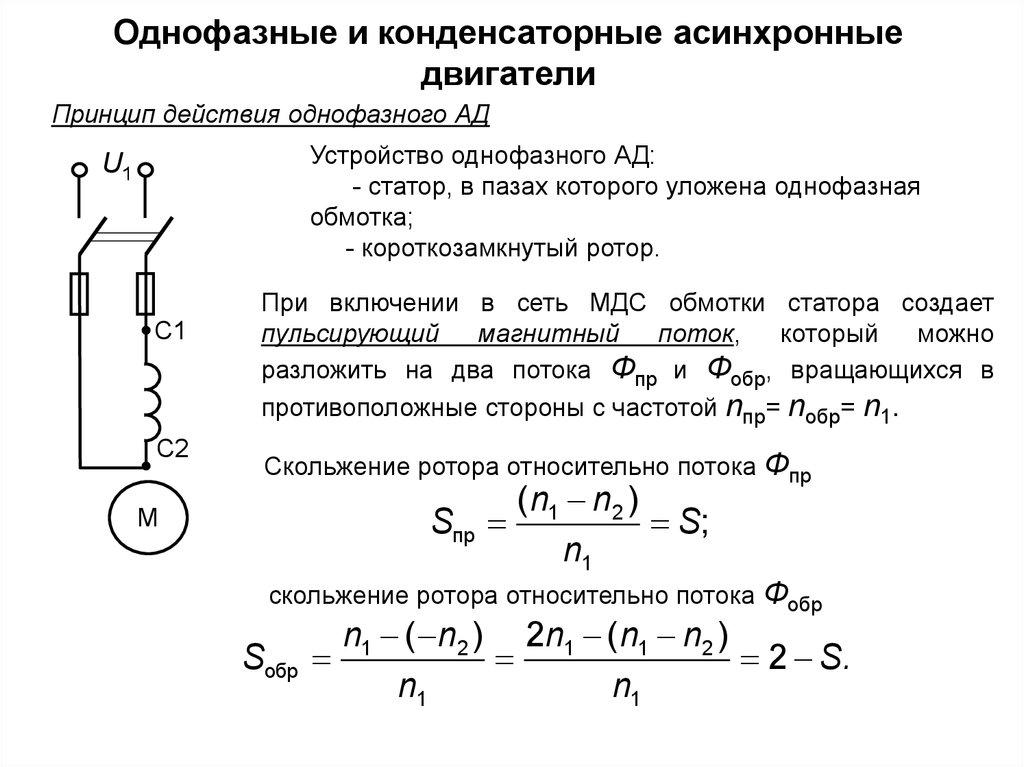
10. В основе устройства АД лежит свойство 3х фазных систем создавать вращающееся магнитное поле
Принцип действия АДN
+
S
n1 Частота вращения
n2
магнитного поля n1
Частота вращения рамки n2
По закону Ампера на рамку,
пересекаемую магнитным полем,
действует сила, создающая
вращающий момент.
11.
При этом n2< n1, т.к. момент силывозникает только при пересечении
витка магнитным полем.
Устройства, у которых скорость
вращения ротора (рамки)
не совпадает со скоростью вращения
магнитного поля, называются
асинхронными.
12.
Относительное отставаниечастоты вращения ротора от
частоты вращения магнитного
поля называется скольжением “S”
n1 n2
S
n1
Sn = n1 – n2 называется частотой
скольжения
13.
Устройствоасинхронной машины
14.
Асинхронная машинасостоит из двух частей:
неподвижной – статора и
вращающейся – ротора.
15.
Конструкция статораСердечник статора – полый
цилиндр, собранный из отдельных
колец, штампованных из листов
электротехнической стали (0,5 мм).
Кольца изолированы друг от друга
слоями лака (для уменьшения
потерь на гистерезис и вихревые
токи)
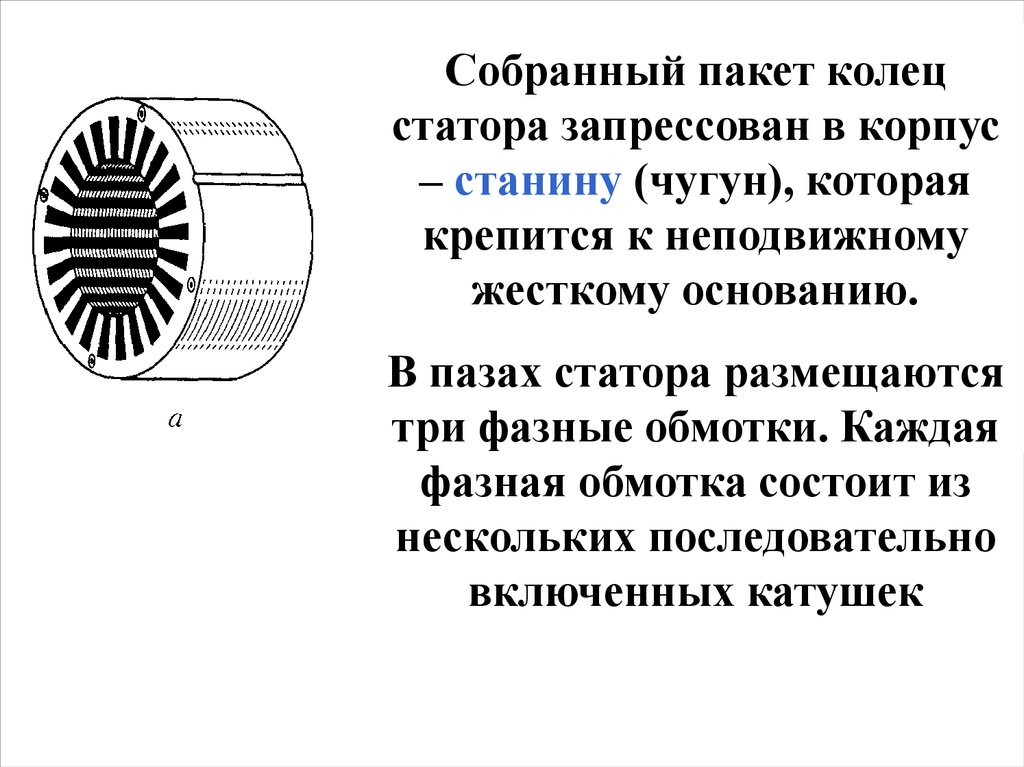
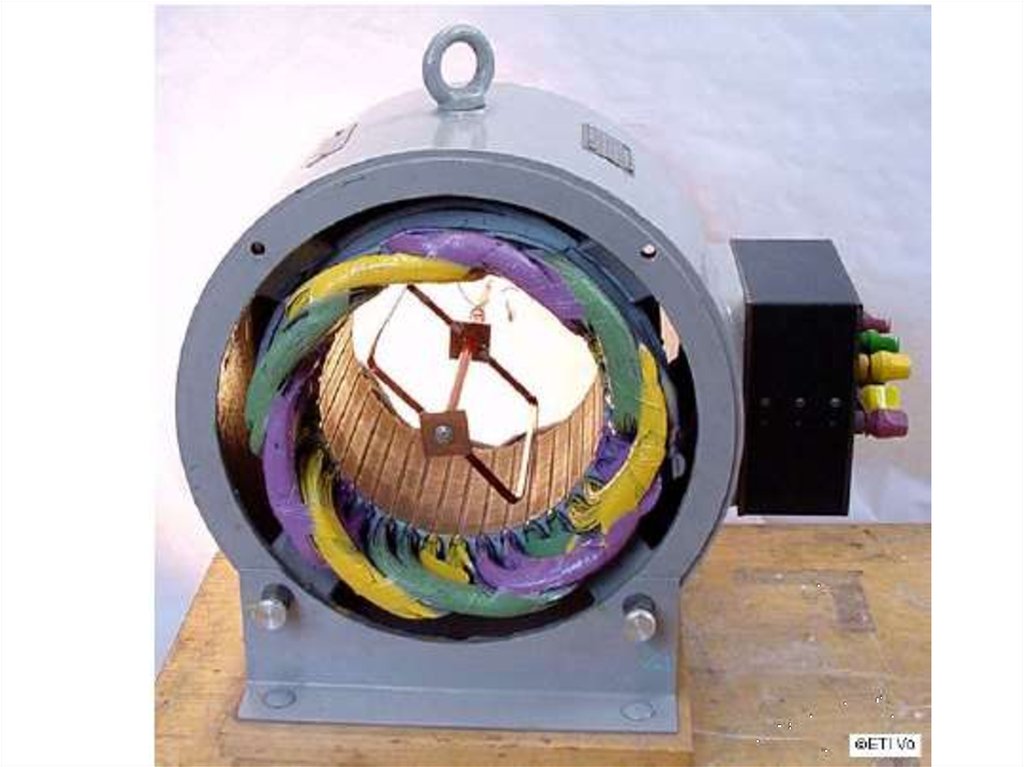
16.
Собранный пакет колецстатора запрессован в корпус
– станину (чугун), которая
крепится к неподвижному
жесткому основанию.
В пазах статора размещаются
три фазные обмотки. Каждая
фазная обмотка состоит из
нескольких последовательно
включенных катушек
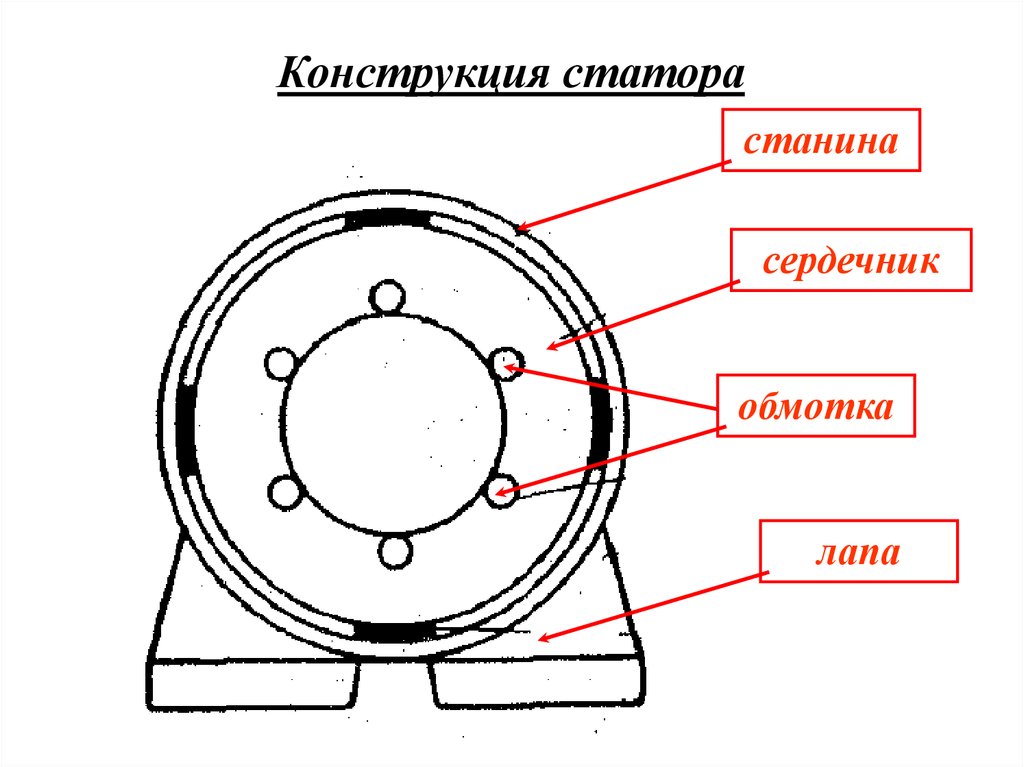
17.
Конструкция статорастанина
сердечник
обмотка
лапа
18.
19.
1 – станина;2 – внутренняя поверхность
листов;
3 – трехфазная обмотка
20. Устройство асинхронного двигателя:
Устройство статораасинхронного двигателя:
1 - сердечник,
2 - обмотка,
3 - станина,
4 - щиток
Сердечник 1 статора набирается из стальных пластин
толщиной 0,35 или 0,5 мм. Пластины штампуют с
впадинами (пазами), изолируют лаком или окалиной для
уменьшения потерь на вихревые токи, собирают в
отдельные пакеты и крепят в станине 3 двигателя.
21.
Начала и концы фаз обмоток статоравыведены на клеммник, закреплённый на
станине. Обмотка статора может быть
соединена по схеме звезда или треугольник.
Выбор схемы соединения обмотки статора
зависит от линейного напряжения сети и
паспортных данных двигателя. В паспорте
трёхфазного двигателя задаются линейные
напряжения сети и схема соединения
обмотки статора. Например, 660/380, Y/∆.
Данный двигатель можно включать в сеть
с Uл = 660В по схеме звезда или в сеть с
Uл=380В – по схеме треугольник.
22. Устройство асинхронного двигателя:
Соединение зажимов нащитке двигателя
при включении обмотки
статора:
а - треугольником,
б - звездой
23.
На щитке машины, закреплённом настанине, приводятся данные: РН, UН, IН,
nН, а также тип машины.
РН – это номинальная полезная
мощность (на валу)
UН и IН – номинальные значения
линейного напряжения и тока для
указанной схемы соединения.
Например, 380/220, Y/∆, IНY/IН∆.
nН – номинальная частота вращения в
об/мин.
24.
Тип машины, например, задан в виде4A315S8.
Это асинхронный двигатель (А) четвёртой
серии защищённого исполнения.
315 – высота оси вращения в мм;
S – установочные размеры (они задаются в
справочнике);
8 – число полюсов машины.
25. Устройство асинхронного двигателя:
Короткозамкнутый роторРотор короткозамкнутого
асинхронного двигателя:
а - устройство,
б - обмотка;
1 - сердечник,
2 - проводники,
3 - медные кольца
Короткозамкнутая обмотка ротора выполняется по типу
беличьего колеса (изо, б). В пазах ротора укладывают
массивные стержни, соединенные на торцовых сторонах
медными кольцами.
26.
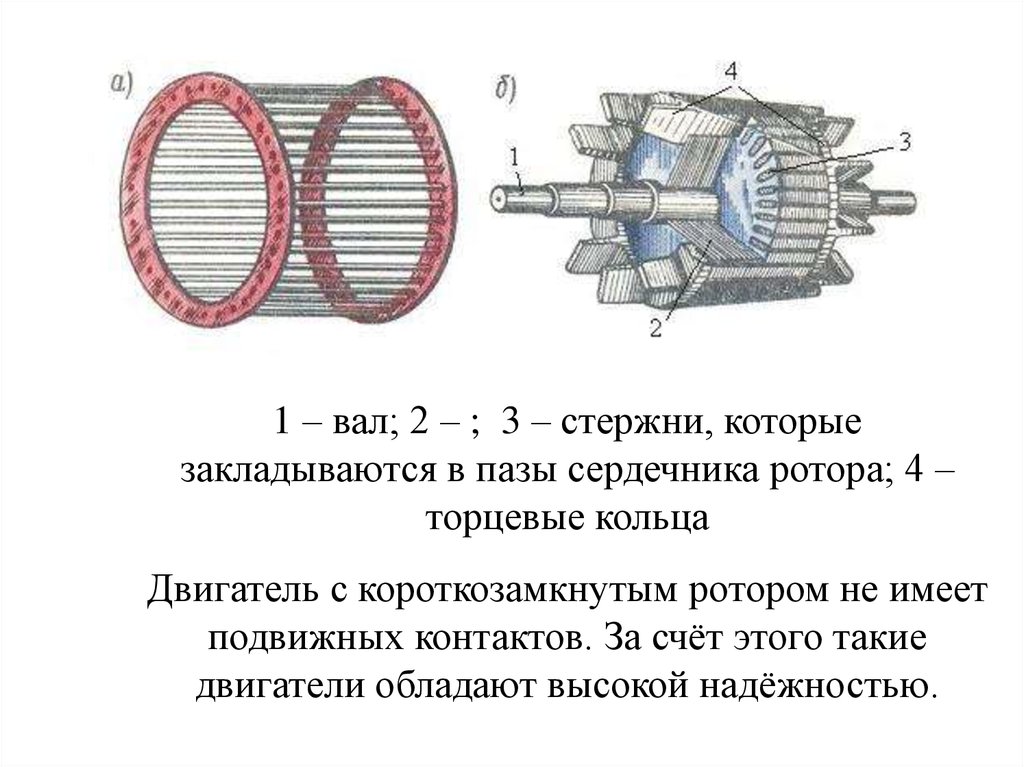
1 – вал; 2 – ; 3 – стержни, которыезакладываются в пазы сердечника ротора; 4 –
торцевые кольца
Двигатель с короткозамкнутым ротором не имеет
подвижных контактов. За счёт этого такие
двигатели обладают высокой надёжностью.
27.
28.
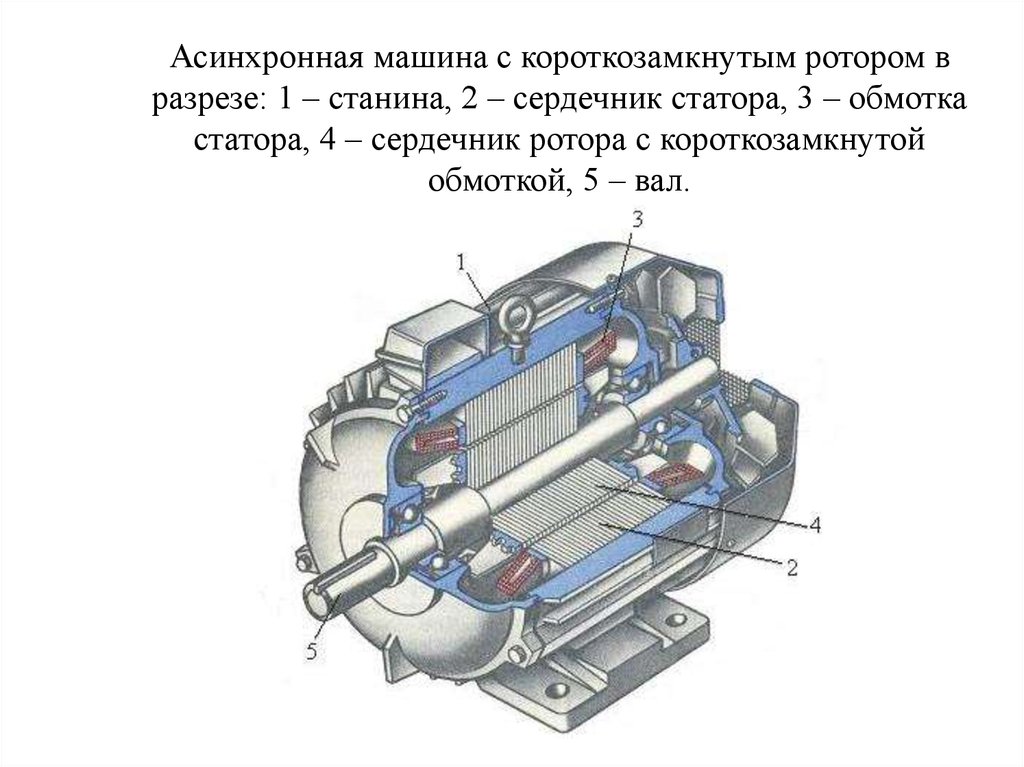
Асинхронная машина с короткозамкнутым ротором вразрезе: 1 – станина, 2 – сердечник статора, 3 – обмотка
статора, 4 – сердечник ротора с короткозамкнутой
обмоткой, 5 – вал.
29. Устройство асинхронного двигателя:
Асинхронные двигатели с короткозамкнутым роторомимеют небольшой пусковой момент и значительный
пусковой ток, что является существенным недостатком
«беличьей клетки».
Достоинства - легкость в изготовлении, и отсутствие
электрического контакта со статической частью машины,
что гарантирует долговечность и снижает затраты на
обслуживание.
30. Устройство асинхронного двигателя:
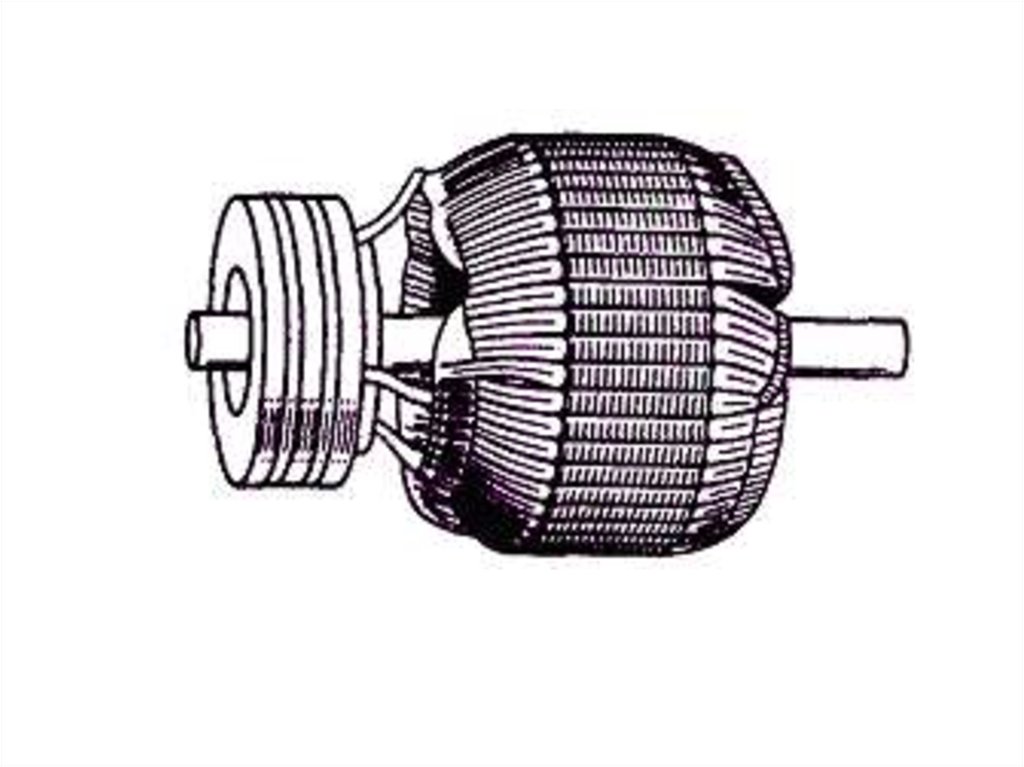
Фазный роторФазная обмотка ротора выполнена подобно
статорной, т. е. проводники соответствующим образом
соединены между собой, образуя трехфазную систему.
Обмотки трех фаз соединены звездой. Начала этих
обмоток подключены к трем контактным медным
кольцам, укрепленным на валу ротора.
Обладают лучшими пусковыми и регулировочными
свойствами.
31.
Обмотка фазного роторавыполняется изолированным
проводом (обычно трехфазная с тем
же числом катушек, что и обмотка
статора).
Три конца фазных обмоток ротора
соединяются звездой, а свободные
концы соединяются с тремя
контактными кольцами (чугун или
медь), укрепленными на валу
машины.
32.
33.
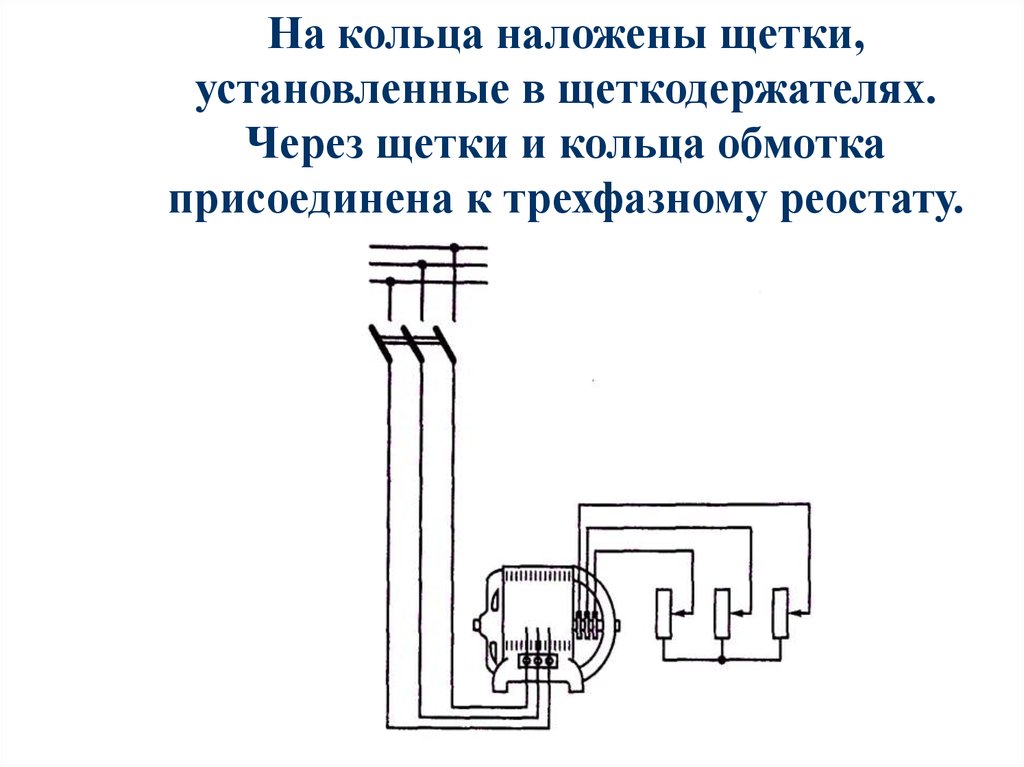
На кольца наложены щетки,установленные в щеткодержателях.
Через щетки и кольца обмотка
присоединена к трехфазному реостату.
34.
Короткозамкнутый роторФазный ротор
35.
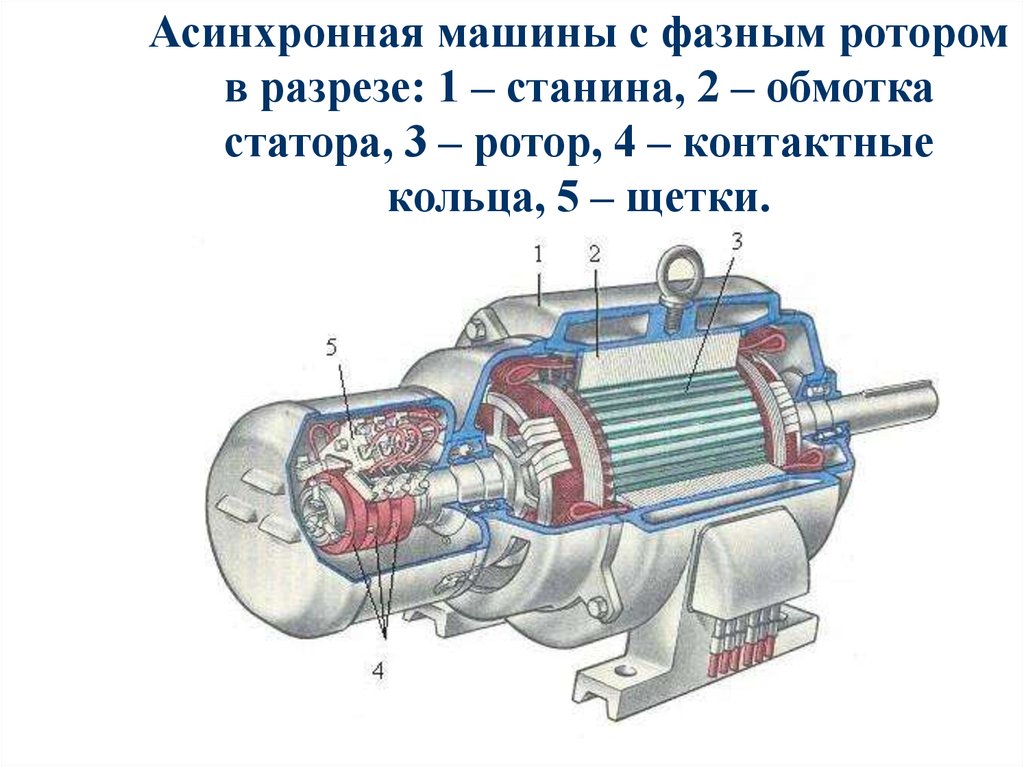
Асинхронная машины с фазным роторомв разрезе: 1 – станина, 2 – обмотка
статора, 3 – ротор, 4 – контактные
кольца, 5 – щетки.
36. Коллекторный узел
37.
38. Устройство асинхронного двигателя:
Наиболее существенным недостатком являетсяотносительно низкий коэффициент мощности (cosφ).
У асинхронного двигателя cosφ при полной нагрузке
может достигать значений 0,85—0,9; при недогрузках
двигателя его cosφ резко уменьшается и при холостом
ходе составляет 0,2—0,3.
39. Устройство асинхронного двигателя:
В целях повышения коэффициента мощностиасинхронных двигателей воздушный зазор стремятся
делать возможно меньшим, доводя его у малых
двигателей (порядка 2—5 кВт) до 0,3 мм.
В двигателях большой мощности воздушный зазор
приходится увеличивать по конструктивным
соображениям, но все же он не превышает 2—2,5 мм.
40.
СтаторСоздание
вращающегося
магнитного поля
41.
Если три катушки,расположенные под углом 120
друг относительно друга,
включить в трехфазную сеть
переменного тока, а в центре этой
окружности поместить
магнитную стрелку на оси, то
стрелка придет во вращение.
Следовательно, эти три катушки
создают вращающееся магнитное
поле.
42.
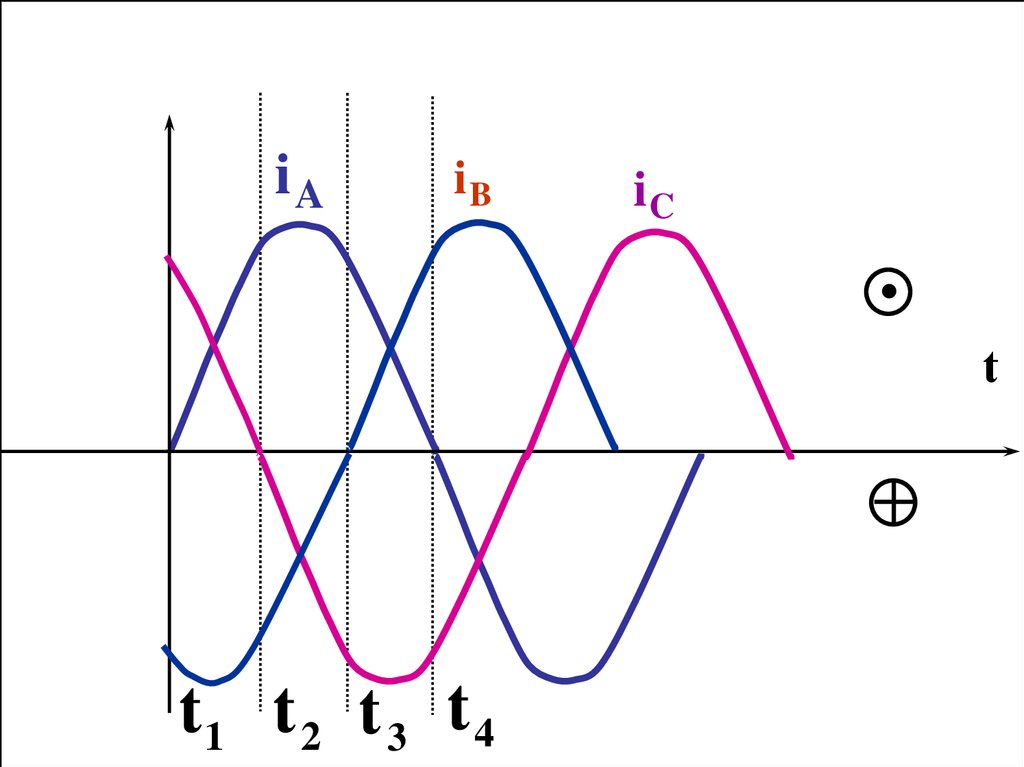
iAiB
iC
t
t1 t 2 t 3 t 4
43.
Выбираем моменты времени черезодну шестую часть периода. Для
каждого из этих моментов
последовательно изобразим
направления результирующего
магнитного поля внутри статора
трехфазной машины, которая имеет
три обмотки по одному витку.
Начала обмоток обозначим буквами
А, В, С, а концы – X, Y, Z.
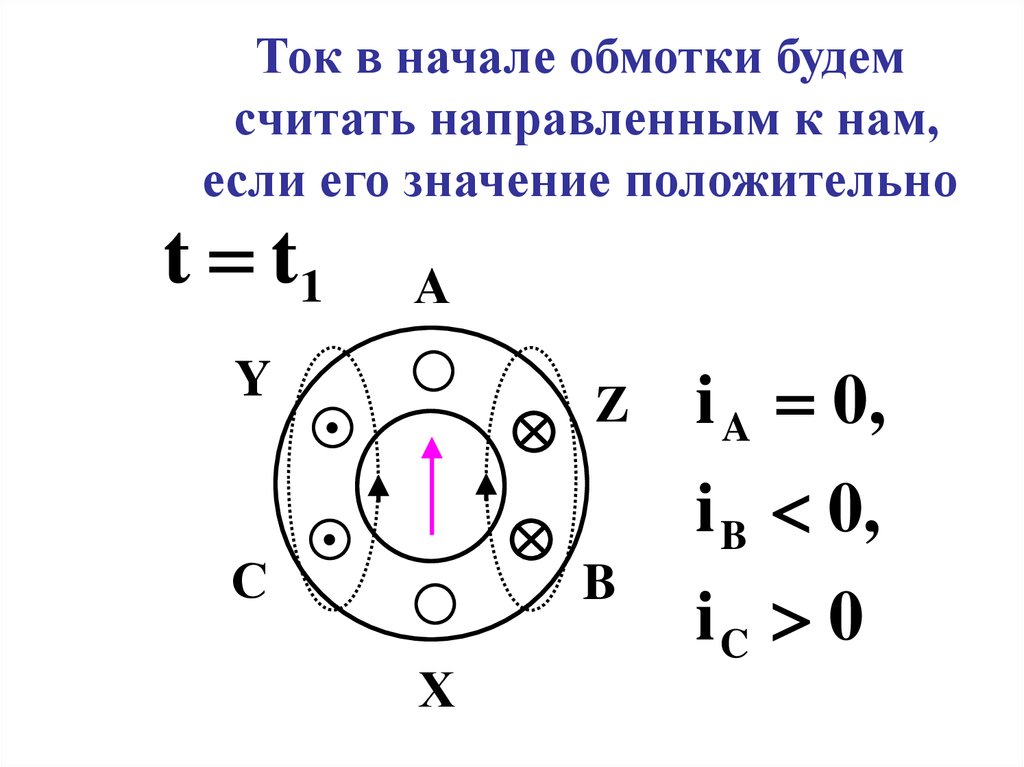
44.
Ток в начале обмотки будемсчитать направленным к нам,
если его значение положительно
t t1
А
Y
С
Х
Z
i A 0,
i B 0,
B
iC 0
45.
t t2А
Y
С
Z
Х
i A 0,
i B 0,
B
iC 0
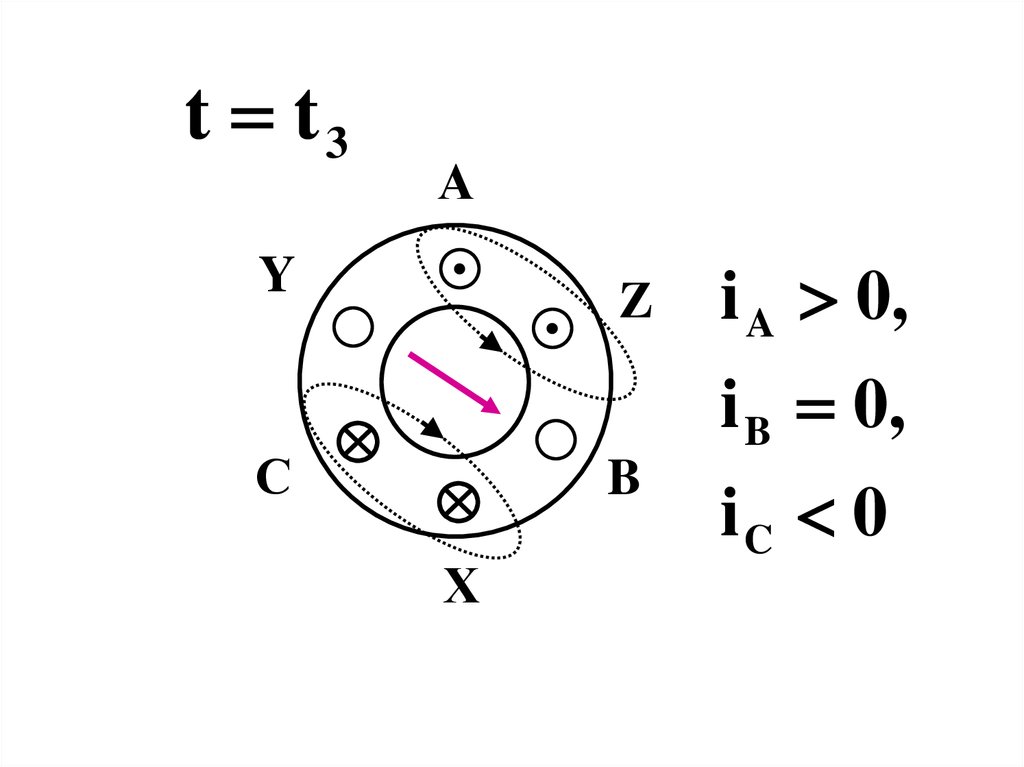
46.
t t3А
Y
С
Z
i A 0,
i B 0,
Х
B
iC 0
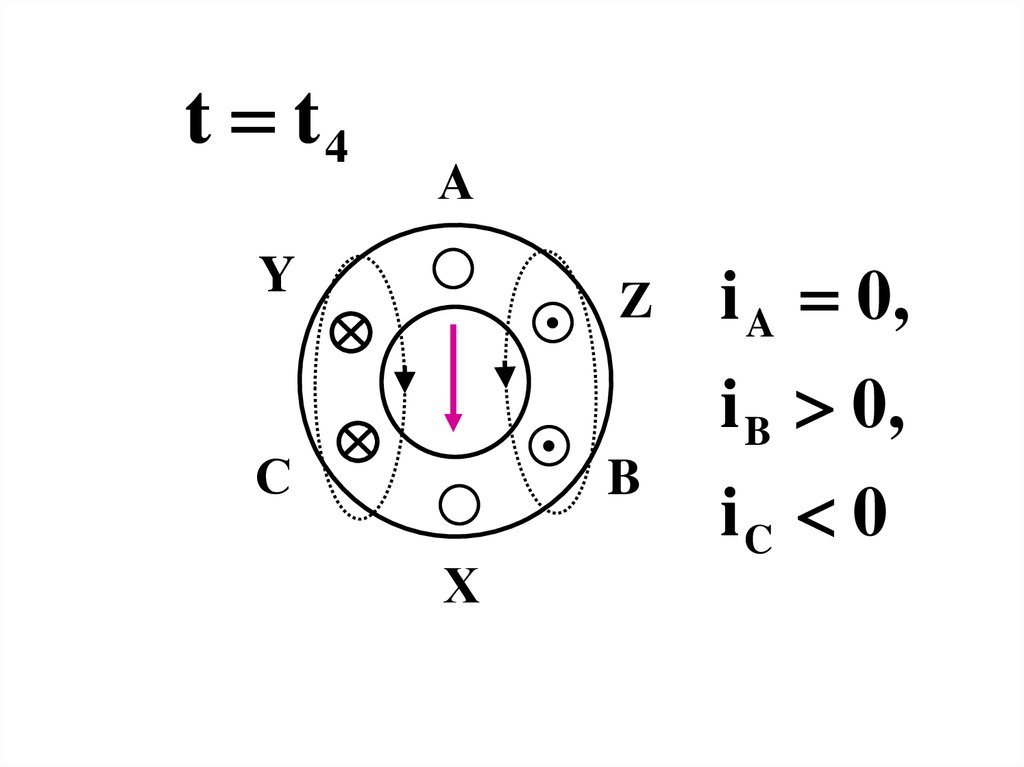
47.
t t4Y
С
А
Z
i A 0,
i B 0,
B
Х
iC 0
48.
За период направление суммарногомагнитного поля сделает один оборот.
В этом случае обмотка статора создаст
магнитное поле с одной парой
полюсов (р=1).
При стандартной частоте
переменного тока f=50 Гц частота
вращения магнитного поля статора
двухполюсной машины
nС 50 60 3000 об / мин
49.
Таким образом, внутри статорасуществует постоянное по значению
равномерно вращающееся
магнитное поле.
Основное условие создания такого
поля – пространственный и
временной сдвиг токов на 120
градусов.
50.
Если поменять любые две фазыместами, то изменится направление
вращения магнитного поля
(реверсирование)
Видоизменив обмотку статора, можно
получить вращающееся магнитное
поле с несколькими парами полюсов.
Если каждая фаза будет состоять из
двух катушек, cдвинутые на 1800, то
магнитное поле будет иметь 2 пары
полюсов (р=2)
51.
В этом случае частота вращения полябудет в 2 раза меньше, чем для р=1.
Число пар полюсов можно сделать
любым, при этом частота вращения
магнитного поля будет определяться
по формуле:
60f
nC
, об / мин
p
52.
Частоты вращения магнитногополя
p
nC
1
2
3
4
5
3000 1500 1000 750 600
53.
Режимы работы трехфазнойасинхронной машины
Режим двигателя: на обмотку статора
подается симметричная система токов и
в машине создается вращающееся
магнитное поле с частотой вращения nC.
Силовые линии этого поля пересекают
обмотку ротора, и в ней по закону
электромагнитной индукции наводится
ЭДС, и по обмотке ротора протекают
токи.
54.
Взаимодействие вращающегосямагнитного поля и токов ротора создает
вращающий момент, увлекающий ротор
за вращающимся магнитным полем.
Если этот момент достаточно велик, то
ротор приходит во вращение и его
установившаяся частота вращения n2
соответствует равенству вращающего
момента МВР тормозному МТ,
приложенному к валу от приводимого
во вращения механизма и внутренних
сил трения.
55.
Относительную разность частотвращения магнитного поля и ротора
называют скольжением:
n1 n2
s
n1
В режиме двигателя, т.е. преобразование
электрической энергии в механическую
0 s 1
56.
Режим генератораЕсли на работающем двигателе ротор
разогнать с помощью двигателя до
частоты > n1 в том же направлении, то
машина перейдет в генераторный режим
и избыток механической мощности
преобразуется в электрическую.
s 0
57.
Режим электромагнитного тормоза (S ≥ 1).Ротор вращается в направлении,
противоположном направлению вращения
поля статора.
Это возможно при реверсе (поле поменяло
направление вращения, а ротор все еще
вращается в противоположном направлении
(если МТ>МВР).
Применяется для быстрой остановки
двигателя, для торможения приводного
механизма (крановые и подъемные устройства
при спуске грузов)
58.
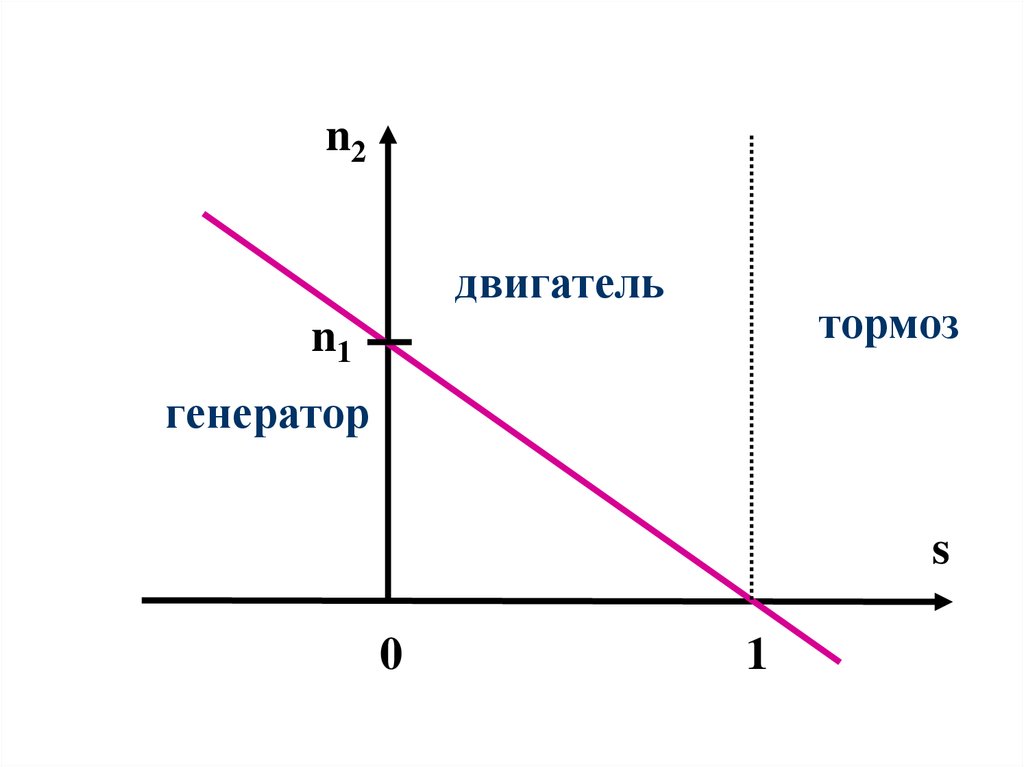
n2двигатель
тормоз
n1
генератор
s
0
1
59.
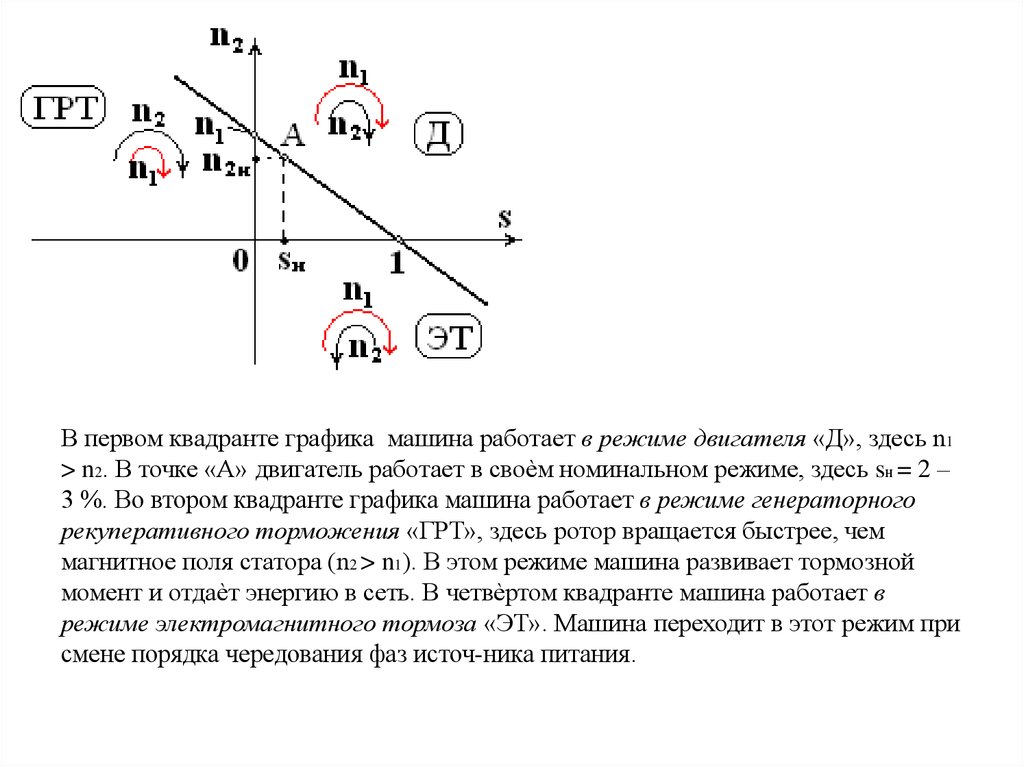
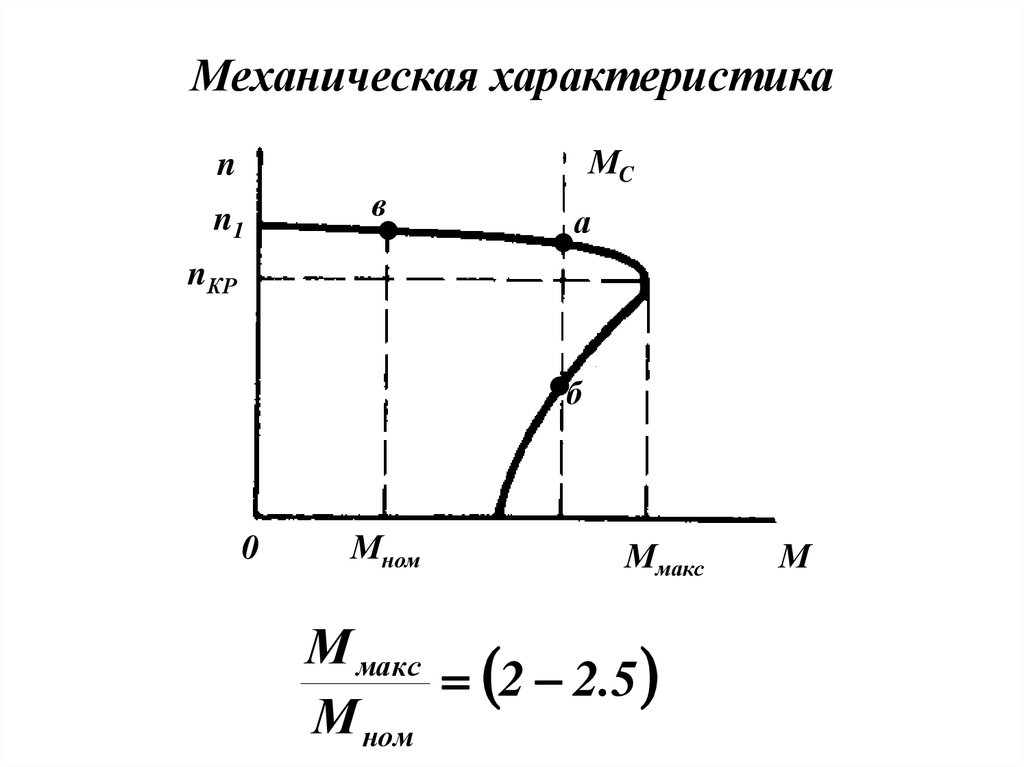
В первом квадранте графика машина работает в режиме двигателя «Д», здесь n1> n2. В точке «А» двигатель работает в своѐм номинальном режиме, здесь sн = 2 –
3 %. Во втором квадранте графика машина работает в режиме генераторного
рекуперативного торможения «ГРТ», здесь ротор вращается быстрее, чем
магнитное поля статора (n2 > n1). В этом режиме машина развивает тормозной
момент и отдаѐт энергию в сеть. В четвѐртом квадранте машина работает в
режиме электромагнитного тормоза «ЭТ». Машина переходит в этот режим при
смене порядка чередования фаз источ-ника питания.
60. Влияние скольжения на работу асинхронных машин
• Работающие под нагрузкой АД имеет:n1=const, n2 =f(s) – т.е зависит от
величины нагрузки на вал машины.
S
• С увеличением нагрузки n2
Магнитное поле чаще пересекает
обмотки ротора, ток в ротора растет и
магнитное поле ротора размагничивает поле
статора, что вызывает автоматическое
увеличение тока в статоре, т.е увеличивается
отбор мощности из сети
61.
С уменьшением нагрузки на вал машины,по аналогии, уменьшается отбор
мощности от сети.
Это автоматическое саморегулирование
асинхронной машины.
Мт
n2
s
Е2
I2
Мв
р
Мвр = Мт
n2
62. Влияние S на частоту э.д.с. ротора и ее величину
E1= 4.44 f1w1ФМE2= 4.44 f2s w2ФМ
f1-частота сети,
f2s – частота изменения магнитного
поля во вращающемся роторе
W1 и W2- число витков в фазных
обмотках статора и ротора,
ФМ – магнитный поток статора
f1 ≠ f2s
63.
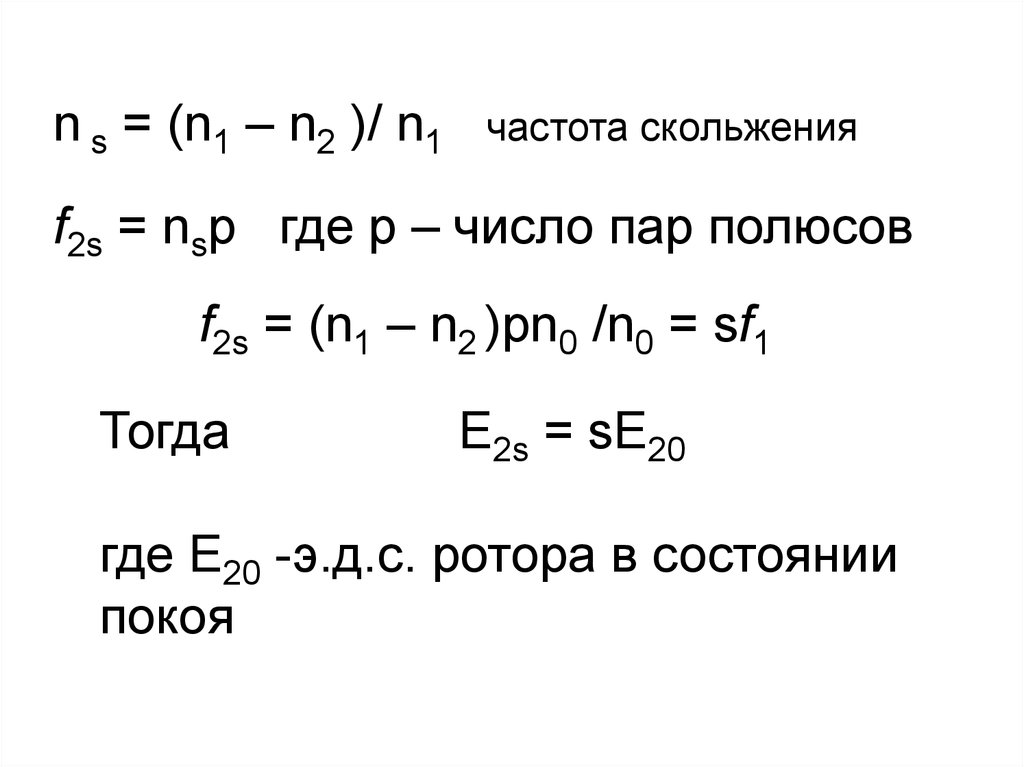
n s = (n1 – n2 )/ n1частота скольжения
f2s = nsp где р – число пар полюсов
f2s = (n1 – n2 )pn0 /n0 = sf1
Тогда
Е2s = sE20
где E20 -э.д.с. ротора в состоянии
покоя
64. Влияние S на индуктивное сопротивление ротора и на ток в роторе
Комплексное сопротивление ротораZP = R2+ jX2
R2<<X2
X2s = w2L
X2s = 2πf2sL = 2πf1sL =
X20s
I 20
I2S
1
2
2
R
X 20 S
2
65.
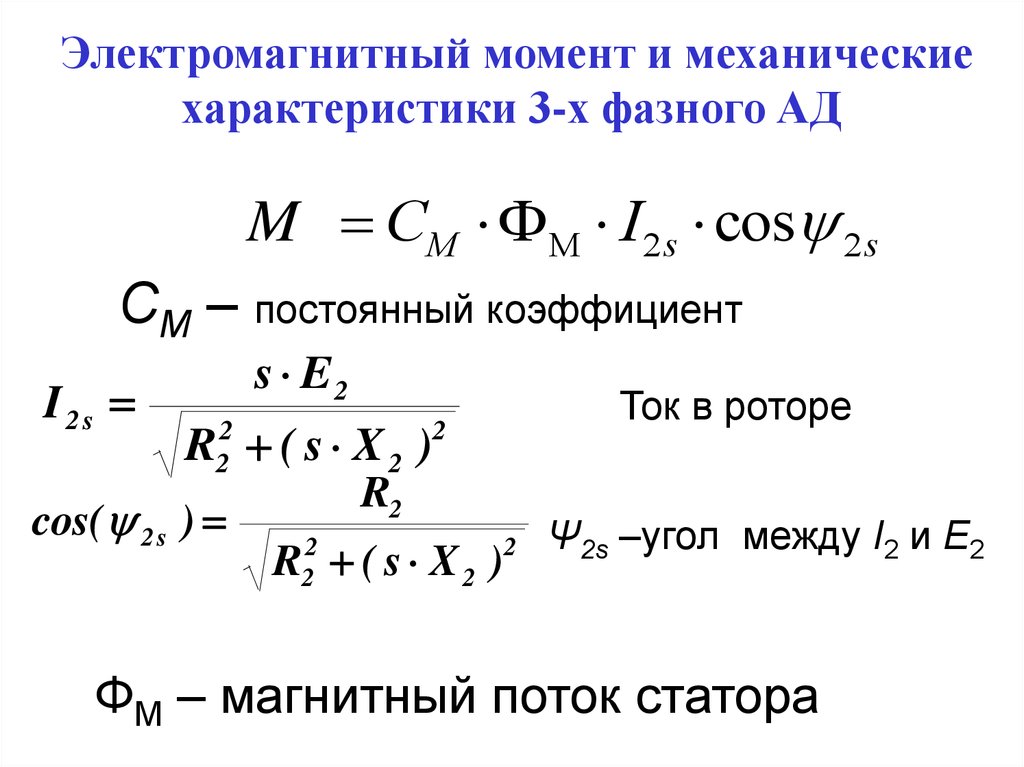
Электромагнитный момент и механическиехарактеристики 3-х фазного АД
M СМ ФМ I 2 s cos 2 s
CМ – постоянный коэффициент
I2s
s E2
Ток в роторе
R22 ( s X 2 )2
cos( 2 s )
R2
R ( s X2 )
2
2
2
Ψ2s –угол между I2 и Е2
ФМ – магнитный поток статора
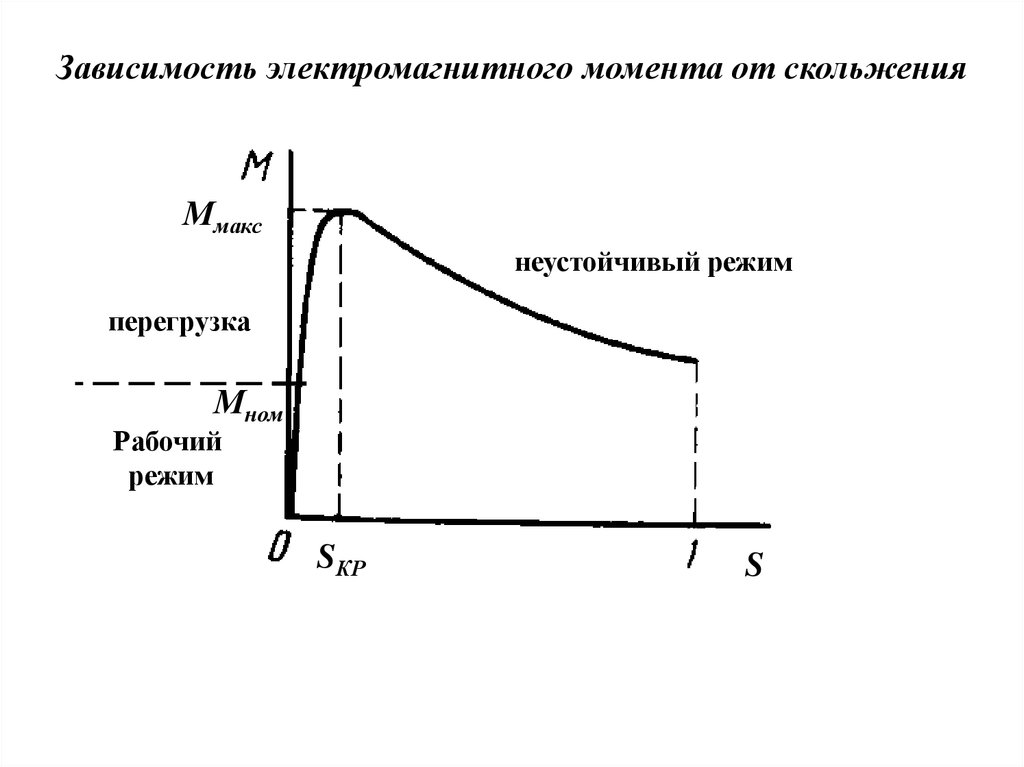
66.
Зависимость электромагнитного момента от скольженияМмакс
неустойчивый режим
перегрузка
Мном
Рабочий
режим
SКР
S
67.
M f SУчасток от 0 до МНОМ
R2
M B S I 2 cos 2
I1 M
Z2
MB M
Участок от МНОМ до ММАХ это
возможная перегрузка
68.
Участок Ммах до МПУСК (S = 1)это неустойчивый режим.
S S KP I 2 const cos 2
MB
M
Для расчета момента можно использовать
уравнение Клосса.
M
2M H
S KP
S
S
S KP
PH
M H 9550
nH
69.
Механическая характеристикаМC
n
n1
в
а
nКР
б
0
Мном
Ммакс
М макс
2 2.5
М ном
М
70. Рабочие характеристики АД
MB,I1,n2 cosφ1η
MB
cosφ
η
n2
I1
P2
71.
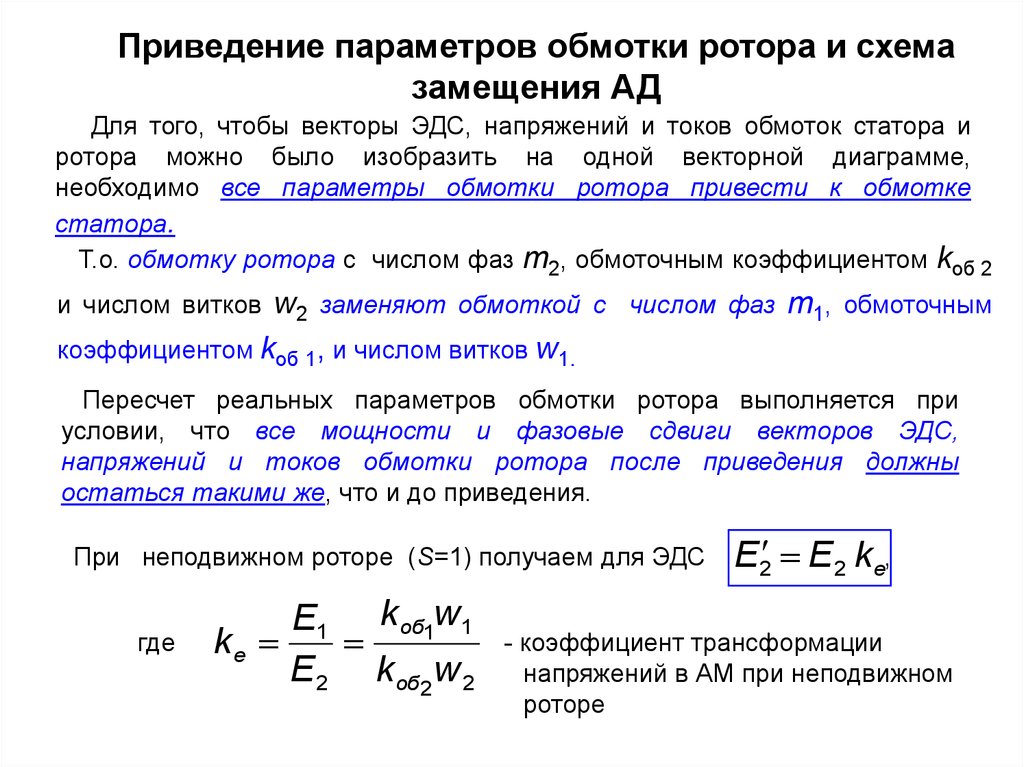
Приведение параметров обмотки ротора и схемазамещения АД
Для того, чтобы векторы ЭДС, напряжений и токов обмоток статора и
ротора можно было изобразить на одной векторной диаграмме,
необходимо все параметры обмотки ротора привести к обмотке
статора.
Т.о. обмотку ротора с числом фаз m2, обмоточным коэффициентом kоб 2
и числом витков
w2 заменяют обмоткой с числом фаз m1, обмоточным
коэффициентом kоб 1, и числом витков w1.
Пересчет реальных параметров обмотки ротора выполняется при
условии, что все мощности и фазовые сдвиги векторов ЭДС,
напряжений и токов обмотки ротора после приведения должны
остаться такими же, что и до приведения.
При неподвижном роторе (S=1) получаем для ЭДС
где
E1 kоб1w1
ke
E2 kоб2 w 2
E2 E2 ke,
- коэффициент трансформации
напряжений в АМ при неподвижном
роторе
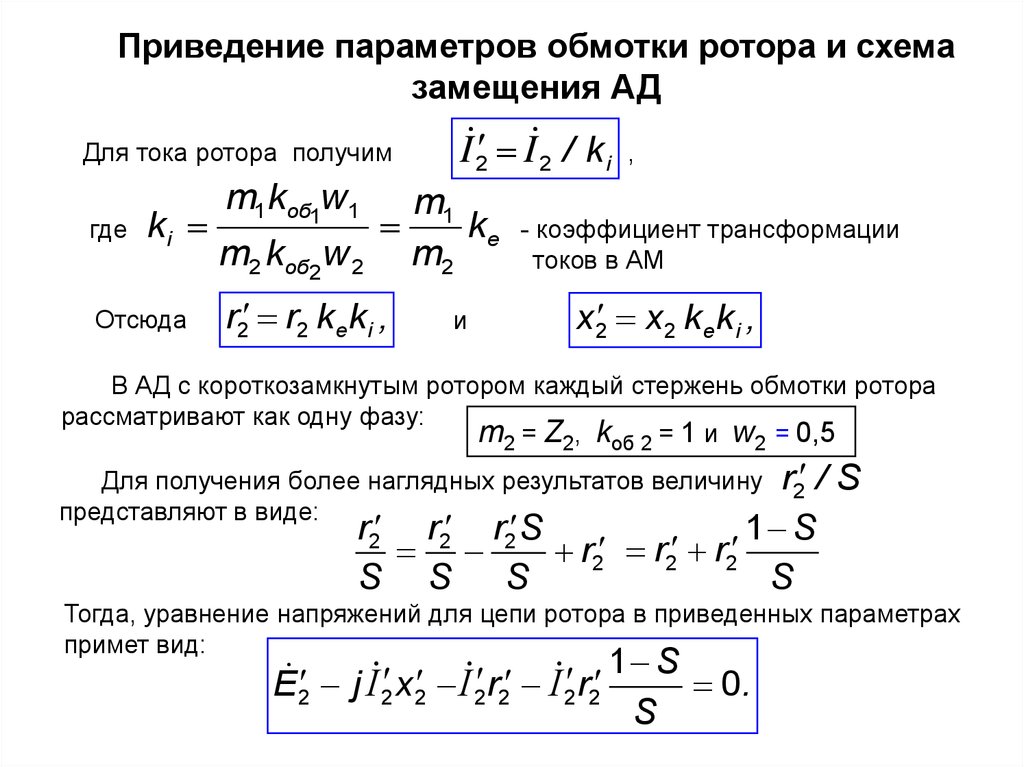
72.
Приведение параметров обмотки ротора и схемазамещения АД
Для тока ротора получим
где
I 2 I 2 / k i
m1 kоб1w1
m1
ki
ke
m2 kоб2 w 2 m2
Отсюда
r2 r2 ke ki ,
и
,
- коэффициент трансформации
токов в АМ
x2 x2 ke ki ,
В АД с короткозамкнутым ротором каждый стержень обмотки ротора
рассматривают как одну фазу:
m2 = Z2, kоб 2 = 1 и w2 = 0,5
r2 / S
1 S
r2 r2 r2 S
r2 r2 r2
S
S S
S
Для получения более наглядных результатов величину
представляют в виде:
Тогда, уравнение напряжений для цепи ротора в приведенных параметрах
примет вид:
1 S
E2 j I 2 x2 I 2r2 I 2r2
0.
S
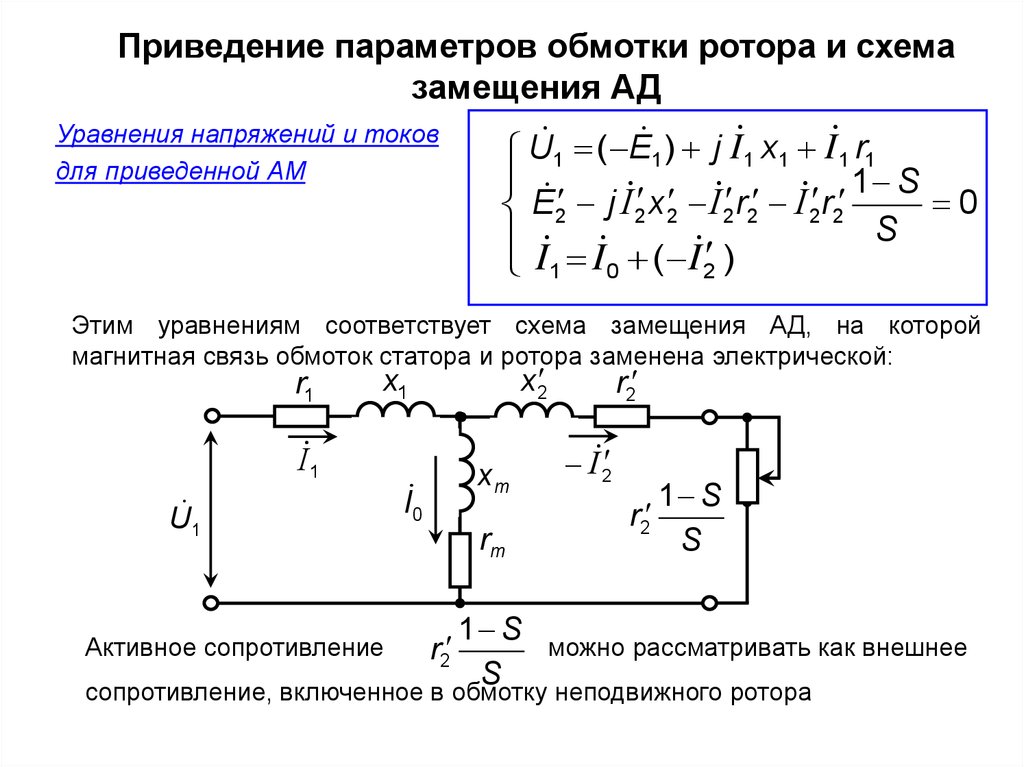
73.
Приведение параметров обмотки ротора и схемазамещения АД
Уравнения напряжений и токов
U 1 ( E 1 ) j I 1 x1 I 1 r1
для приведенной АМ
1 S
E
j
I
x
I
r
I
r
0
2
2 2
2 2
2 2
S
I I ( I )
1 0
2
Этим уравнениям соответствует схема замещения АД, на которой
магнитная связь обмоток статора и ротора заменена электрической:
r1
x2
x1
I 1
U 1
Активное сопротивление
xm
I 0
rm
r2
r2
I 2
1 S
r2
S
1 S
можно рассматривать как внешнее
S
сопротивление, включенное в обмотку неподвижного ротора
74.
Приведение параметров обмотки ротора и схемазамещения АД
АД аналогичен трансформатору, работающему на активную нагрузку.
Сопротивление
r2
1 S
- единственный переменный элемент схемы
S
замещения. Значение этого сопротивления определяется скольжением, и,
следовательно, механической нагрузкой на валу двигателя.
В режиме холостого хода:
M2=0 и S 0, при этом
r2
1 S
S
Если момент нагрузки на валу АД превышает его вращающий момент
Mс> M2 и двигатель останавливается, то S=1
при этом r2
1 S
0,что соответствует режиму короткого замыкания.
S
Более удобной для практического применения является Г-образная
схема замещения АД, у которой намагничивающий контур вынесен на
входные зажимы схемы
75.
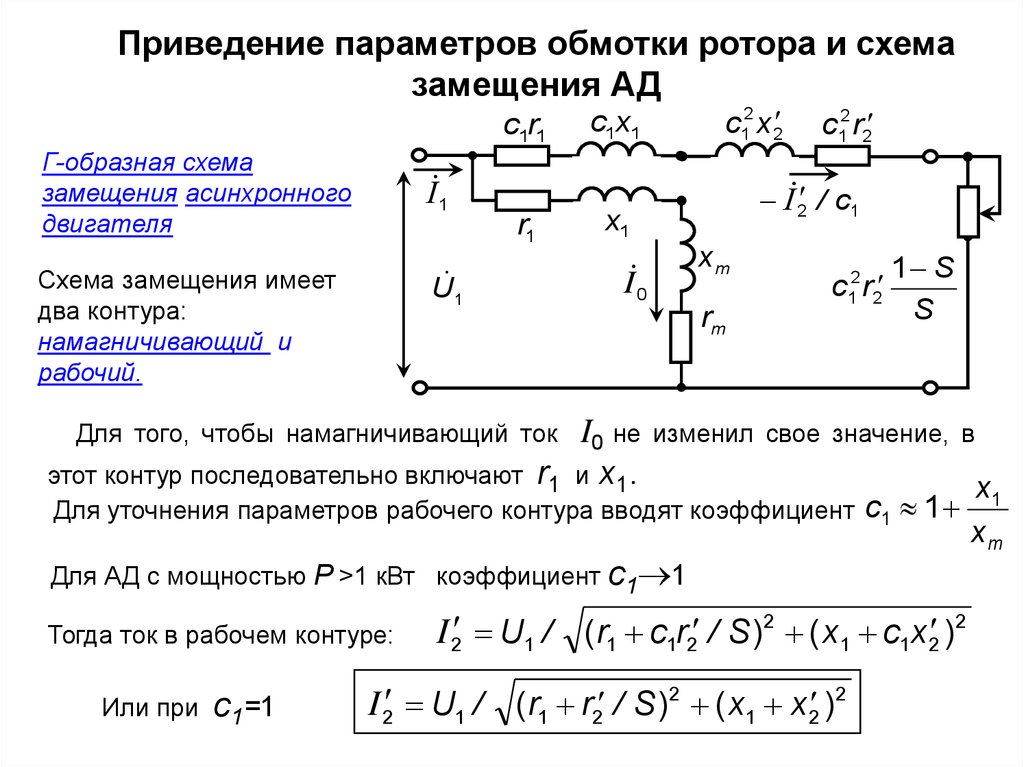
Приведение параметров обмотки ротора и схемазамещения АД
с1r1
Г-образная схема
замещения асинхронного
двигателя
I 1
Схема замещения имеет
два контура:
намагничивающий и
рабочий.
с12 x 2
с1x1
I 2 / с1
x1
r1
xm
I 0
U 1
с12 r2
с r
rm
I0 не
r 1 и x 1.
Для того, чтобы намагничивающий ток
2
1 2
1 S
S
изменил свое значение, в
этот контур последовательно включают
Для уточнения параметров рабочего контура вводят коэффициент
с1 1
Для АД с мощностью P >1 кВт коэффициент с1 1
Тогда ток в рабочем контуре:
Или при
с1=1
I 2 U1 / (r1 c1r2 / S )2 ( x1 c1x2 )2
I 2 U1 / (r1 r2 / S )2 ( x1 x2 )2
x1
xm
76.
Электромагнитный момент имеханические характеристики АД
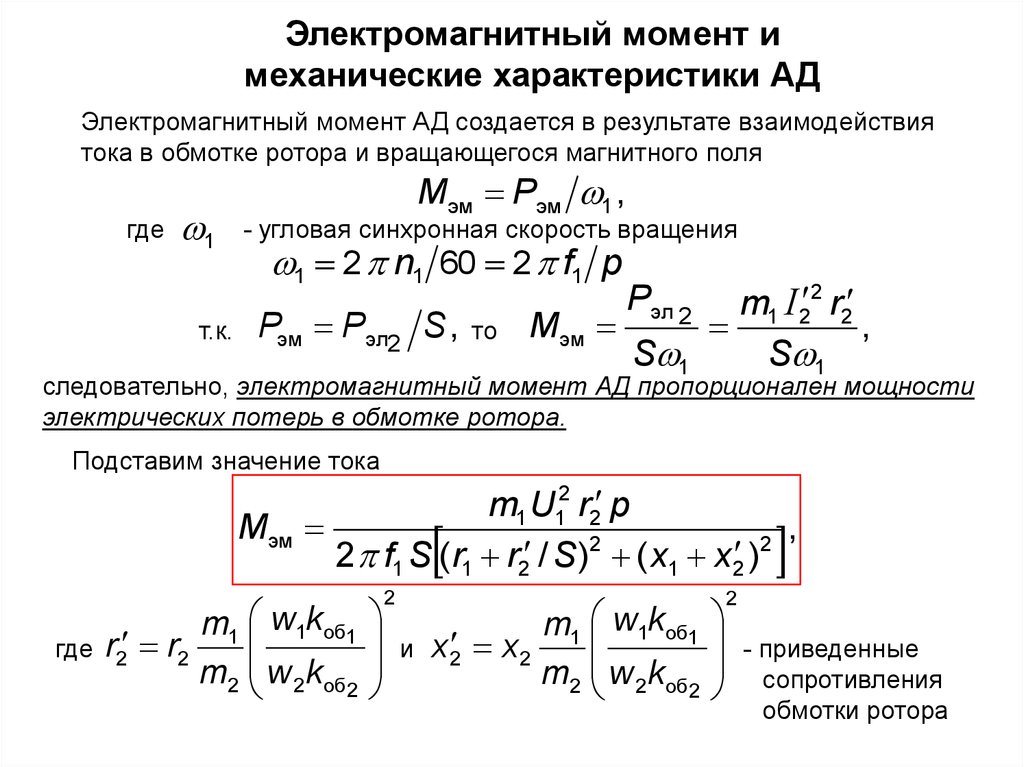
Электромагнитный момент АД создается в результате взаимодействия
тока в обмотке ротора и вращающегося магнитного поля
где
1
т.к.
Мэм Рэм 1 ,
- угловая синхронная скорость вращения
1 2 n1 60 2 f1 p
Pэм Рэл2 S ,
то
Мэм
m1 I 2 2 r2
,
S 1
S 1
Рэл 2
следовательно, электромагнитный момент АД пропорционален мощности
электрических потерь в обмотке ротора.
Подставим значение тока
Мэм
где
m1 U12 r2 p
,
2
2
2 f1 S (r1 r2 / S ) ( x1 x2 )
m1 w1kоб1
r2 r2
m2 w 2kоб2
2
и
m1 w1kоб1
x2 x2
m2 w 2kоб2
2
- приведенные
сопротивления
обмотки ротора
77.
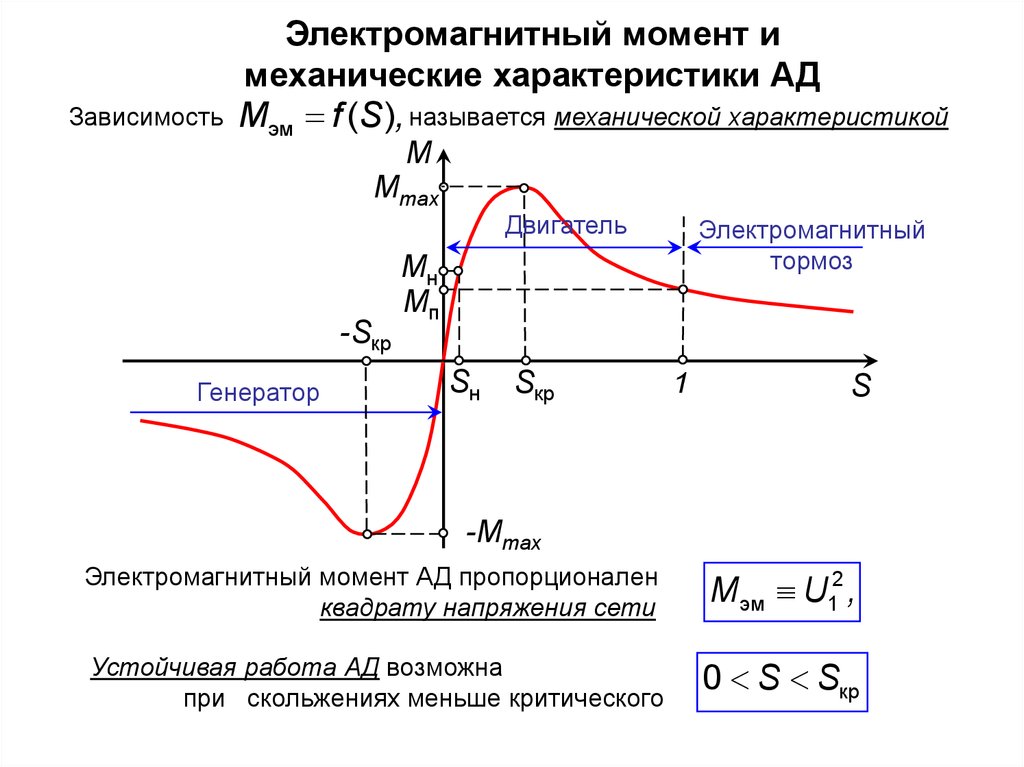
ЗависимостьЭлектромагнитный момент и
механические характеристики АД
Мэм f (S ), называется механической характеристикой
M
Mmax
Двигатель
-Sкр
Генератор
Электромагнитный
тормоз
Mн
Mп
Sн
Sкр
1
S
-Mmax
Электромагнитный момент АД пропорционален
квадрату напряжения сети
М эм U12 ,
Устойчивая работа АД возможна
при скольжениях меньше критического
0 S Sкр
78.
Рабочие характеристики АДК рабочим характеристикам относятся зависимости от полезной мощности :
при U1 – const
и f1 – const
- частоты вращения
- коэффициента полезного действия
- коэффициента мощности
- тока статора
n2 n1(1 S)
M2 f (P2 ),
сos 1 f (P2 ),
и
I1 f (P2 )
n2 f (P2 )
S Pэл2 / Pэм - скольжение АД и его частота
вращения определяются отношением электрических потерь к электромагнитной мощности
r2
r2 r2
0
f (P2 ),
- полезного момента (момента на валу)
Скоростная характеристика
n2
n1
n2 f (P2 ),
Увеличение активного сопротивления
ротора r2 приводит к росту наклона
характеристики.
P2
79.
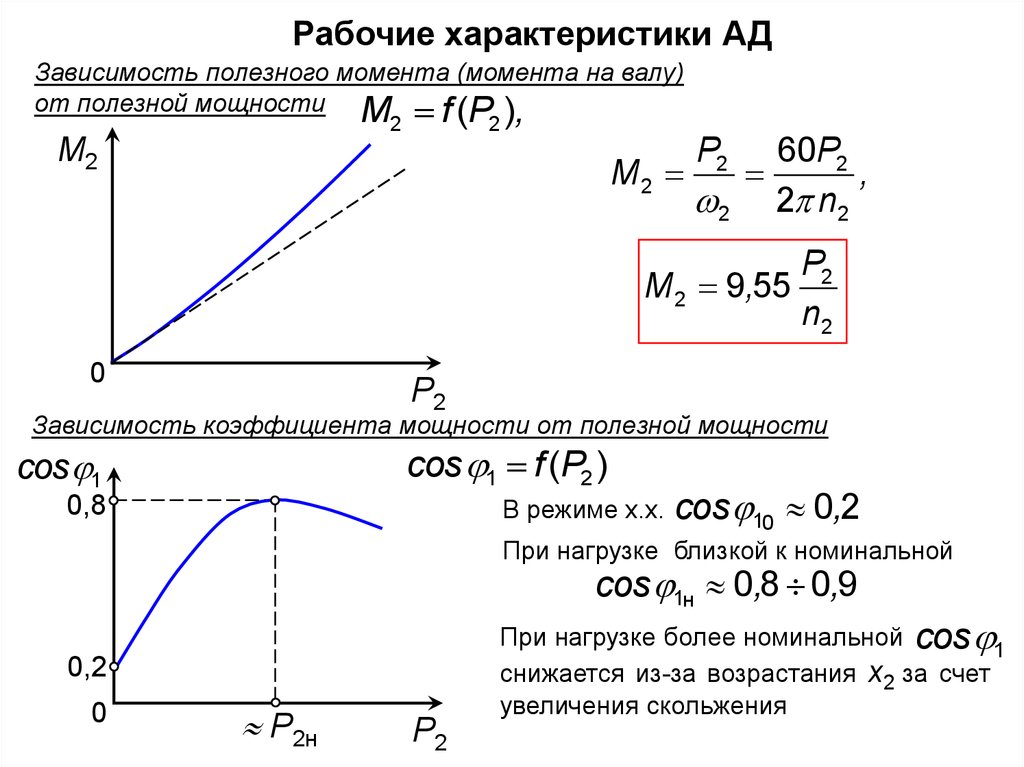
Рабочие характеристики АДЗависимость полезного момента (момента на валу)
от полезной мощности M f (P ),
2
М2
2
P2
60P2
M2
,
2 2 n2
P2
M 2 9,55
n2
0
P2
Зависимость коэффициента мощности от полезной мощности
cos 1 f (P2 )
cos 1
0,8
В режиме х.х.
cos 10 0,2
При нагрузке близкой к номинальной
cos 1н 0,8 0,9
0,2
0
P2н
P2
При нагрузке более номинальной cos 1
снижается из-за возрастания x2 за счет
увеличения скольжения
80.
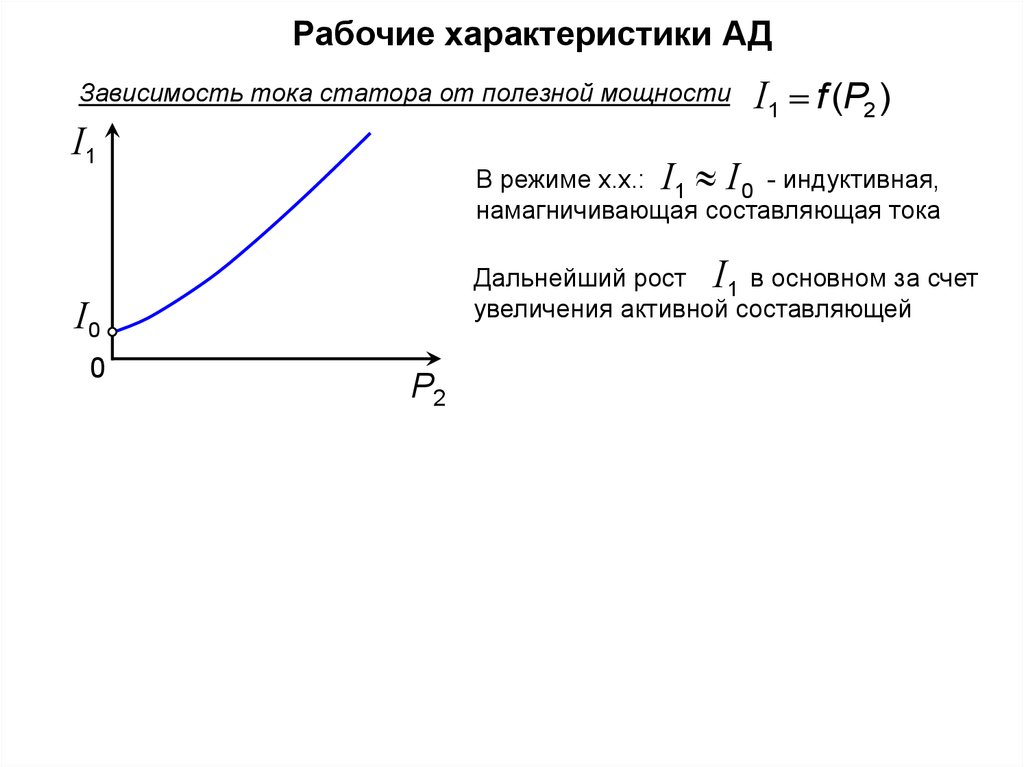
Рабочие характеристики АДЗависимость тока статора от полезной мощности
I1
В режиме х.х.: I1 I 0 - индуктивная,
намагничивающая составляющая тока
Дальнейший рост I1 в основном за счет
увеличения активной составляющей
I0
0
I1 f (P2 )
P2
81. Пуск и регулирование частоты вращения асинхронных двигателей
Пусковые свойства АД определяются значениямипускового тока I п и пускового момента Мп:
U1
В момент
пуска
IП
( r1 r2 )2 ( x1 x 2 )2
m1 U12 r2 p
МП
2 f1 (r1 r2 )2 ( x1 x2 )2
S =1
Два пути улучшения пусковых свойств АД:
1) Уменьшение
2) Увеличение
r.2
U1
снижение и I п, и
Мп
снижение I п и увеличение
Мп
Пуск асинхронных двигателей с к. з. ротором
а) пуск непосредственным включением в сеть:
пусковой ток Iп =
(5 ÷7) Iн , но значительный Мп
Применяется в АД мощностью до (30÷50) кВт
82.
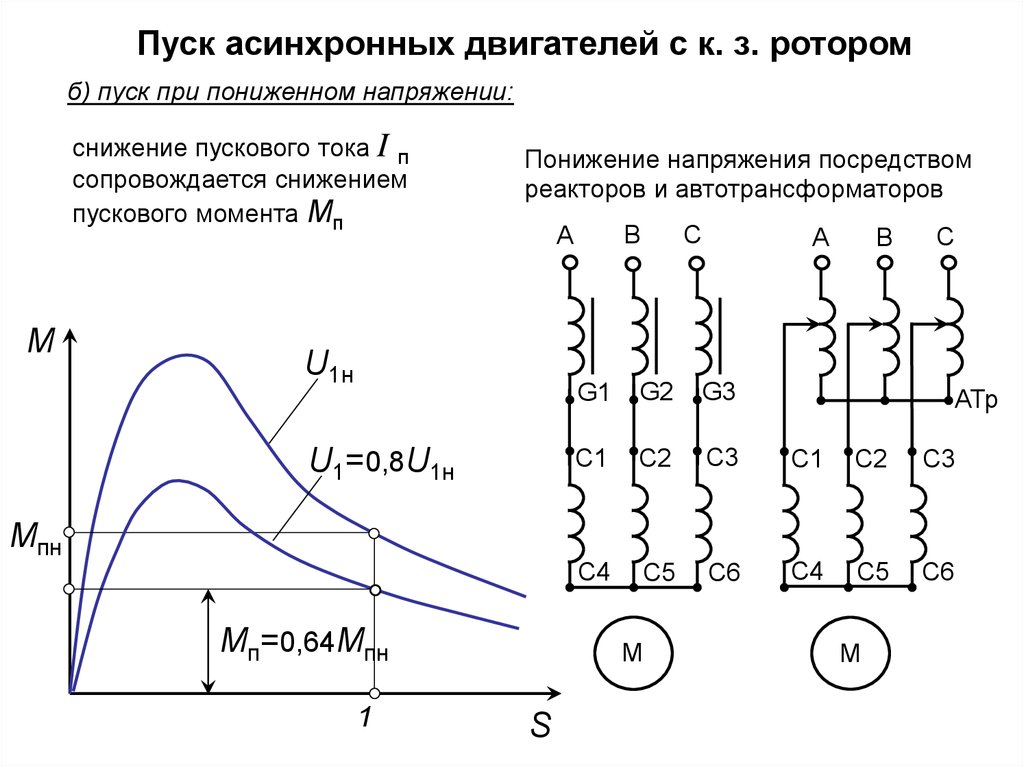
Пуск асинхронных двигателей с к. з. роторомб) пуск при пониженном напряжении:
снижение пускового тока I п
сопровождается снижением
пускового момента Мп
M
Понижение напряжения посредством
реакторов и автотрансформаторов
U1н
U1=0,8U1н
Mпн
Mп=0,64Mпн
1
В
А
С
G1
G2
G3
С1
С2
С3
С1
С2
С3
С4
С5
С6
С4
С5
С6
М
S
С
В
А
АТр
М
83.
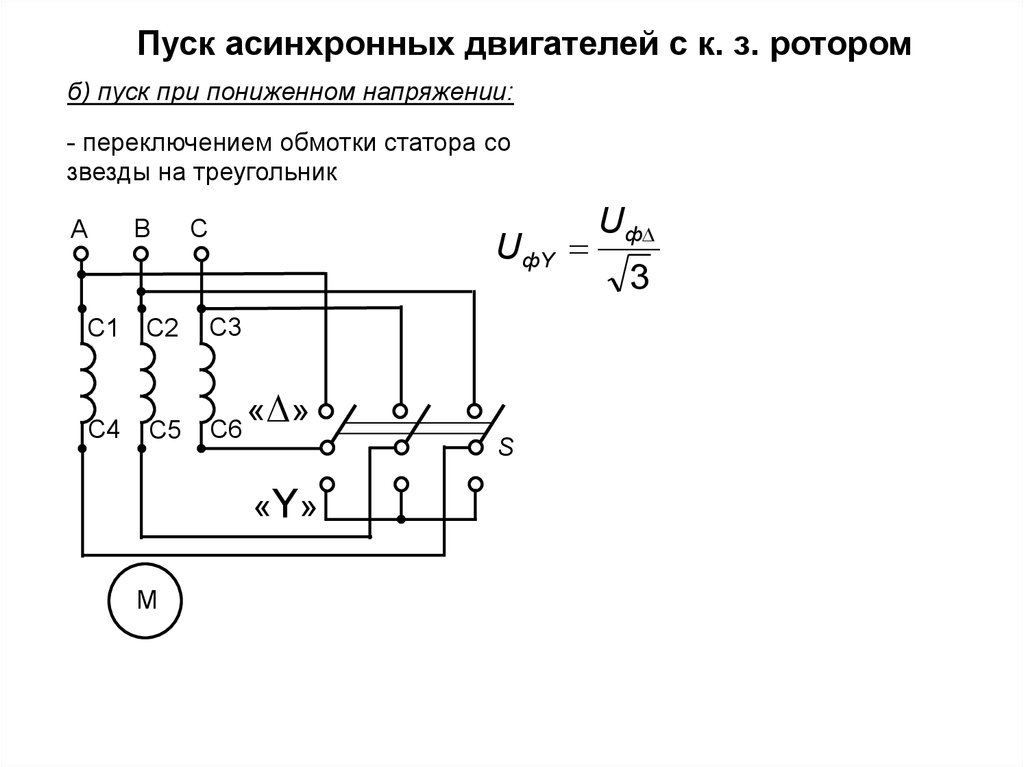
Пуск асинхронных двигателей с к. з. роторомб) пуск при пониженном напряжении:
- переключением обмотки статора со
звезды на треугольник
А
В
С
UфY
С1
С2
С3
С4
С5
С6
«∆»
S
«Y»
М
Uф
3
84. Пуск асинхронных двигателей с фазным ротором
СВ
А
ПР
С2
1
2
3
С4 С5
С6
С1
3
M
С3
2
1
Ммакс
Mн
Sн
1
S
85. АД с КЗР и улучшенными пусковыми характеристиками
- двигатель с глубокими пазами на роторе- эффект «вытеснения тока»
h
h
Пуск
Работа
S=1
Sн= 0,05
J, А/мм2
f2 = f1·S = f1
- пазы ротора «бутылочной формы»
J, А/мм2
f2 = f1·S = 0,05·f1
- двигатель с двумя клетками
на роторе
пусковая
рабочая
86.
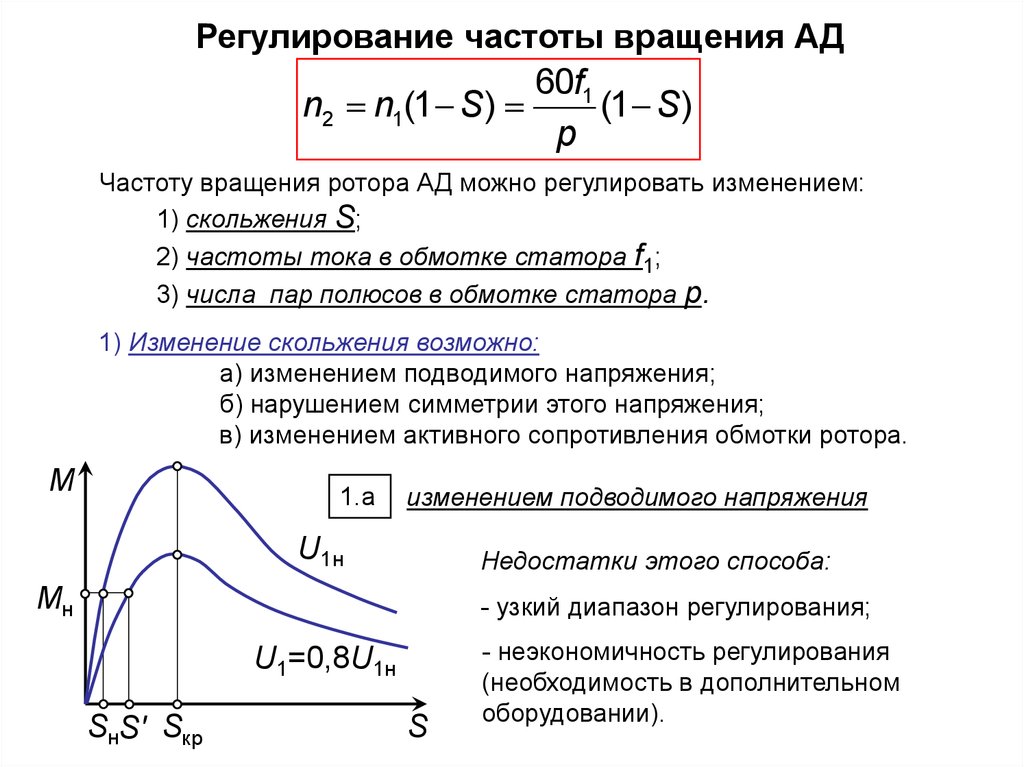
Регулирование частоты вращения АД60f1
n2 n1(1 S )
(1 S )
p
Частоту вращения ротора АД можно регулировать изменением:
1) скольжения S;
2) частоты тока в обмотке статора f1;
3) числа пар полюсов в обмотке статора p.
1) Изменение скольжения возможно:
а) изменением подводимого напряжения;
б) нарушением симметрии этого напряжения;
в) изменением активного сопротивления обмотки ротора.
M
1.а
изменением подводимого напряжения
U1н
Недостатки этого способа:
Mн
- узкий диапазон регулирования;
U1=0,8U1н
SнS' Sкр
S
- неэкономичность регулирования
(необходимость в дополнительном
оборудовании).
87.
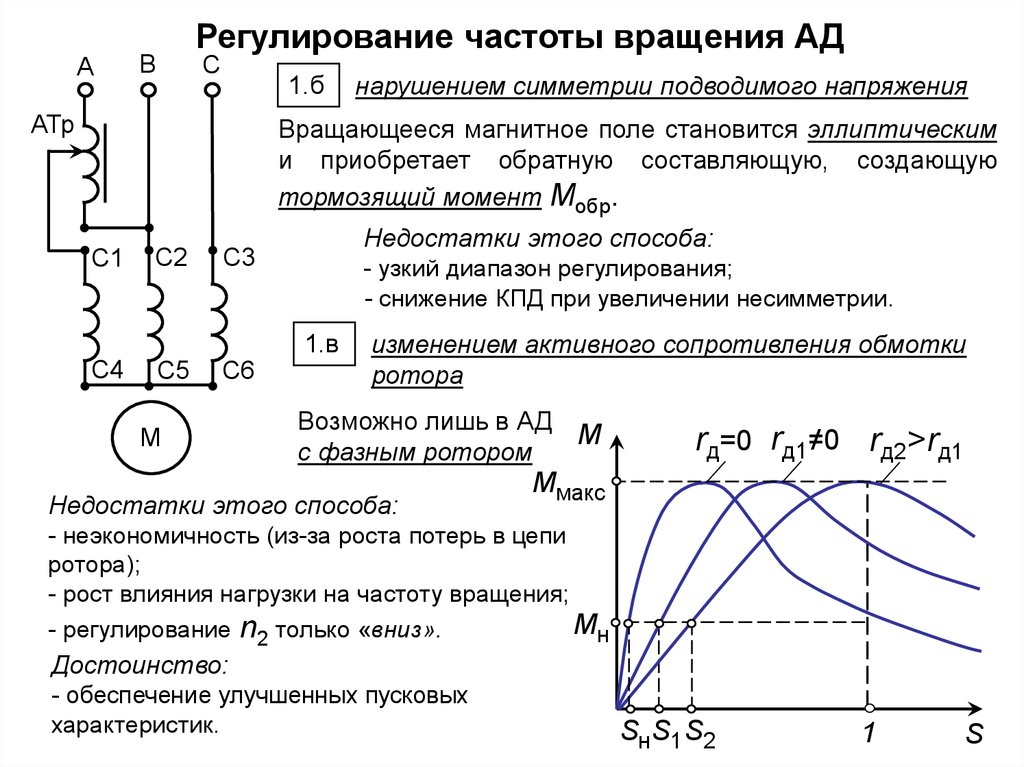
АРегулирование частоты вращения АД
В
С
1.б
АТр
нарушением симметрии подводимого напряжения
Вращающееся магнитное поле становится эллиптическим
и приобретает обратную составляющую, создающую
тормозящий момент Мобр.
С1
С4
С2
С5
Недостатки этого способа:
С3
С6
М
- узкий диапазон регулирования;
- снижение КПД при увеличении несимметрии.
1.в
изменением активного сопротивления обмотки
ротора
Возможно лишь в АД
M
с фазным ротором
Недостатки этого способа:
rд=0 rд1≠0 rд2>rд1
Ммакс
- неэкономичность (из-за роста потерь в цепи
ротора);
- рост влияния нагрузки на частоту вращения;
Mн
- регулирование n2 только «вниз».
Достоинство:
- обеспечение улучшенных пусковых
характеристик.
SнS1 S2
1
S
88.
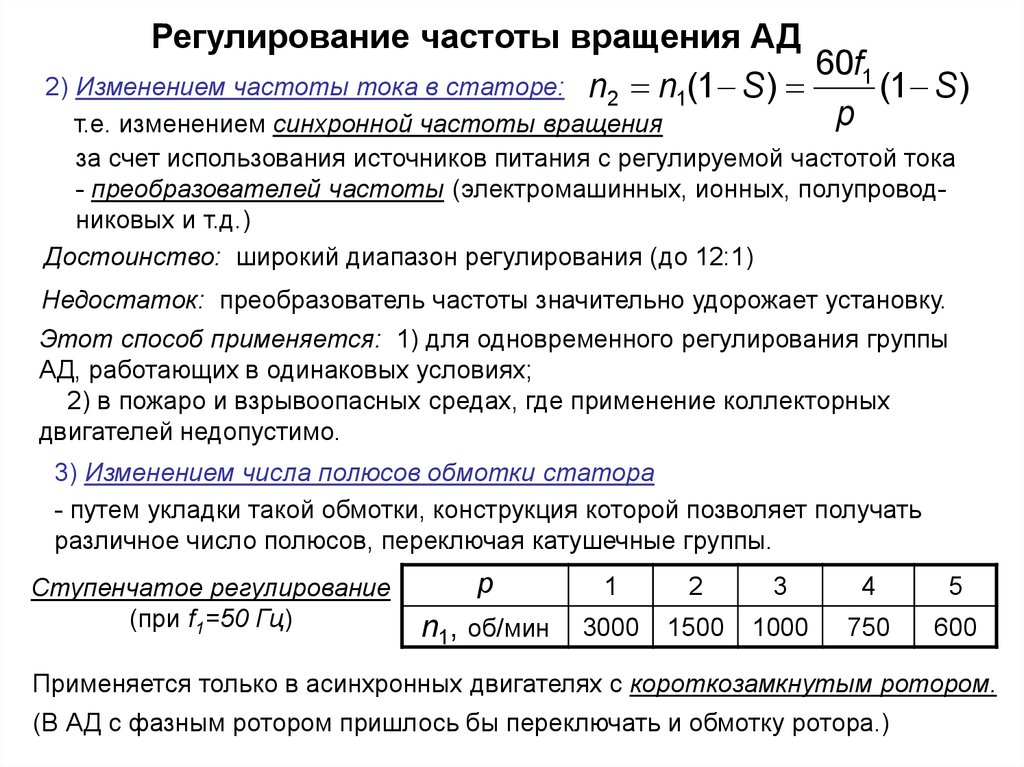
Регулирование частоты вращения АД60f1
2) Изменением частоты тока в статоре: n2 n1(1 S )
(1 S )
p
т.е. изменением синхронной частоты вращения
за счет использования источников питания с регулируемой частотой тока
- преобразователей частоты (электромашинных, ионных, полупроводниковых и т.д.)
Достоинство: широкий диапазон регулирования (до 12:1)
Недостаток: преобразователь частоты значительно удорожает установку.
Этот способ применяется: 1) для одновременного регулирования группы
АД, работающих в одинаковых условиях;
2) в пожаро и взрывоопасных средах, где применение коллекторных
двигателей недопустимо.
3) Изменением числа полюсов обмотки статора
- путем укладки такой обмотки, конструкция которой позволяет получать
различное число полюсов, переключая катушечные группы.
Ступенчатое регулирование
(при f1=50 Гц)
p
1
2
3
4
5
n1, об/мин
3000
1500
1000
750
600
Применяется только в асинхронных двигателях с короткозамкнутым ротором.
(В АД с фазным ротором пришлось бы переключать и обмотку ротора.)
89.
Пуск 3-х фазного АД в ходПусковые
свойства
определяются
величинами:
пусковым током,
начальным пусковым моментом,
плавностью и экономичностью пускового
процесса,
длительностью пуска.
Пусковые свойства АД определяются
особенностями его конструкции, в частности
устройством ротор
90.
§ 8.1 Пуск АД с фазным роторомМ
R2
R2+Rp1
R2+Rp2
1
МНОМ 1
2
3
2
3
SНОМ
1
S
91.
Пуск АД с короткозамкнутым роторомПрямой пуск. Применим для АД с
короткозамкнутым ротором мощностью Р2
100 кВт.
Для пуска необходим рубильник или
масляный выключатель.
I пуск
I ном
5.5 7
92.
Пуск при пониженном напряжении.Для уменьшения Iпуск на время понижают
напряжение между выводами фазных
обмоток
статора,
включив
последовательно с обмоткой статора
трехфазную катушку индуктивности.
Такой способ уменьшение Iпуск вызывает
уменьшение Мпуск, пропорционального
квадрату напряжения.
93.
Использование АД с короткозамкнутымротором специальной конструкции
1. Обмотка ротора - двойная беличья
клетка, т.е. ротор снабжен 2 клетками,
лежащими одна над другой: наружной —
пусковой (из марганцовистой латуни) и
внутренней — рабочей (из меди).
2. применение АД с глубоким пазом.
Обмотка
ротора
изготовляется
из
прямоугольных стержней малой ширины и
большой высоты, которые помещаются в
глубокие пазы в сердечнике ротора.
94.
Регулирование частоты вращения 3-хфазного АД
Частота вращения ротора
60 f
n2
(1 s )
p
АД с короткозамкнутым ротором:
- метод частотного регулирования:
-метод изменения числа пар полюсов
вращающегося магнитного поля.
АД с фазным ротором - метод реостатного
регулирования.
95.
Метод частотного регулированияЭто
плавное
регулирование
частоты вращения магнитного поля
путем регулирования частоты тока в
обмотках статора
Достоинства:
-плавность и большой диапазон
регулирования частоты,
-экономичность, т.к. не выделяются
дополнительные потери.
96.
Схема включения АД с частотнымрегулированием скорости
сеть
f = 50 Гц
выпрямитель
U = var
инвертор
f1 = var U1 = var
97.
Механические характеристики.n2
MC
U=UНОМ, f>>fНОМ
U=UНОМ, f>fНОМ
n1
UНОМ, fНОМ
f<fНОМ
U<UНОМ
f<<fНОМ
U<<UНОМ
М
98.
Метод изменения числа пар полюсовОснован на изменении числа пар
полюсов вращающегося магнитного поля
статора, т. е. на изменении частоты
вращения магнитного поля n1 = 60 f1/р
2 f зависит только от р
При f1 =const П
p
1 способ (у АД небольшой мощности): на статор
поместить две отдельные обмотки.
2 способ (у АД большой мощности): путем
изменения схемы соединения катушек одной
обмотки статора, что приведет к изменению
числа пар полюсов
99.
Метод реостатного регулированияПрименяется у АД с фазным ротором.
В
цепь
обмотки
ротора
вводится
трехфазный реостат, рассчитанный на
длительный режим работы и называют
регулировочным реостатом.
100.
Комплексная мощность трехфазногоасинхронного двигателя
S P jQ
1
1
1
3U1I 1 cos 1 3U 1I 1 sin 1
где
P1 , Q1
активная и реактивная
мощности двигателя
101.
Активная мощность определяетсреднюю мощность необратимого
преобразования электрической
энергии в механическую, тепловую и
другие виды энергии, а реактивная
мощность – максимальную мощность
обмена энергией между источником и
магнитным полем двигателя
102. Коэффициент полезного действия АД
P2P1
Р2 - полезная мощность на валу
Р1 – мощность потребляемая из сети
103.
Энергетическая диаграмма двигателяP1
Pпр 1
PЭМ
PC
P2
Pмех
Pпр 2
Pдоб
P1 3U1I1 cos 1 мощность,
Pм.п.
подведенная из
сети;
104.
Pпр 1PC
мощность потерь на нагревание
проводов обмотки статора (потери в
меди);
мощность потерь на гистерезис и
вихревые токи в обмотке статора (потери
в стали);
P
М
P
электромагнитная
ЭМ
ВР
1
мощность, передаваемая
ротору;
мощность потерь на нагревание
пр 2
проводов обмотки ротора (потери в
меди);
Pмех М ВР 2 механическая мощность;
105.
Pдоб добавочные потери (создаютсяпульсациями магнитного поля);
Pм.п.
механические потери;
P2 полезная механическая мощность,
отдаваемая на валу двигателя
Мощность потерь в роторе пропорциональна S,
Поэтому АД конструируется так, чтобы nНОМ≈ n1.
106.
Однофазные и конденсаторные асинхронныедвигатели
Принцип действия однофазного АД
Устройство однофазного АД:
- статор, в пазах которого уложена однофазная
обмотка;
- короткозамкнутый ротор.
U1
С1
С2
При включении в сеть МДС обмотки статора создает
пульсирующий
магнитный
поток,
который
можно
разложить на два потока Фпр и Фобр, вращающихся в
противоположные стороны с частотой nпр= nобр= n1.
Скольжение ротора относительно потока Фпр
(n1 n2 )
Sпр
S;
n1
М
скольжение ротора относительно потока Фобр
Sобр
n1 ( n2 ) 2n1 (n1 n2 )
2 S.
n1
n1
107.
Однофазные и конденсаторные асинхронныедвигатели
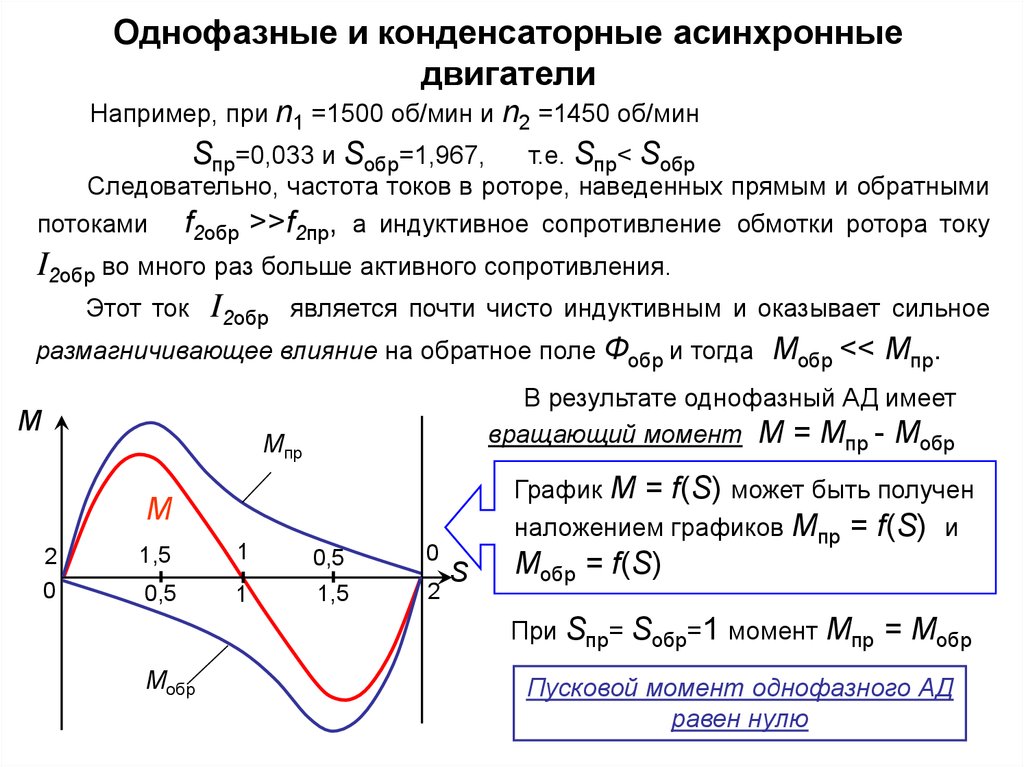
Например, при n1 =1500 об/мин и n2 =1450 об/мин
Sпр=0,033 и Sобр=1,967,
т.е. Sпр< Sобр
Следовательно, частота токов в роторе, наведенных прямым и обратными
потоками f2обр >>f2пр, а индуктивное сопротивление обмотки ротора току
I2обр во много раз больше активного сопротивления.
Этот ток I2обр является почти чисто индуктивным
и оказывает сильное
размагничивающее влияние на обратное поле Фобр и тогда
M
В результате однофазный АД имеет
вращающий момент M = Mпр - Mобр
Mпр
График M = f(S) может быть получен
наложением графиков Mпр = f(S) и
M
2
0
Mобр << Mпр.
1,5
1
0,5
0
0,5
1
1,5
2
S
Mобр = f(S)
При Sпр= Sобр=1 момент Mпр
Mобр
= Mобр
Пусковой момент однофазного АД
равен нулю
108.
Однофазные и конденсаторные асинхронныедвигатели
Для создания пускового момента необходимо во время пуска создать
вращающееся магнитное поле.
С этой целью применяют пусковую обмотку В.
U1
Обмотки А и В располагают на статоре
со смещением на 90 эл. градусов.
Пуск
С1
А
IА
С2
М
ФЭ
В
П2
IВ
Токи в обмотках статора IА и IВ должны быть
сдвинуты по фазе на 900.
U1
IВ
В
А
IА
А+ В=900
П1
Для этого в цепь пусковой обмотки включают
фазосмещающий элемент (чаще всего С).
После достижения частоты вращения близкой к номинальной пусковую
обмотку отключают.
109.
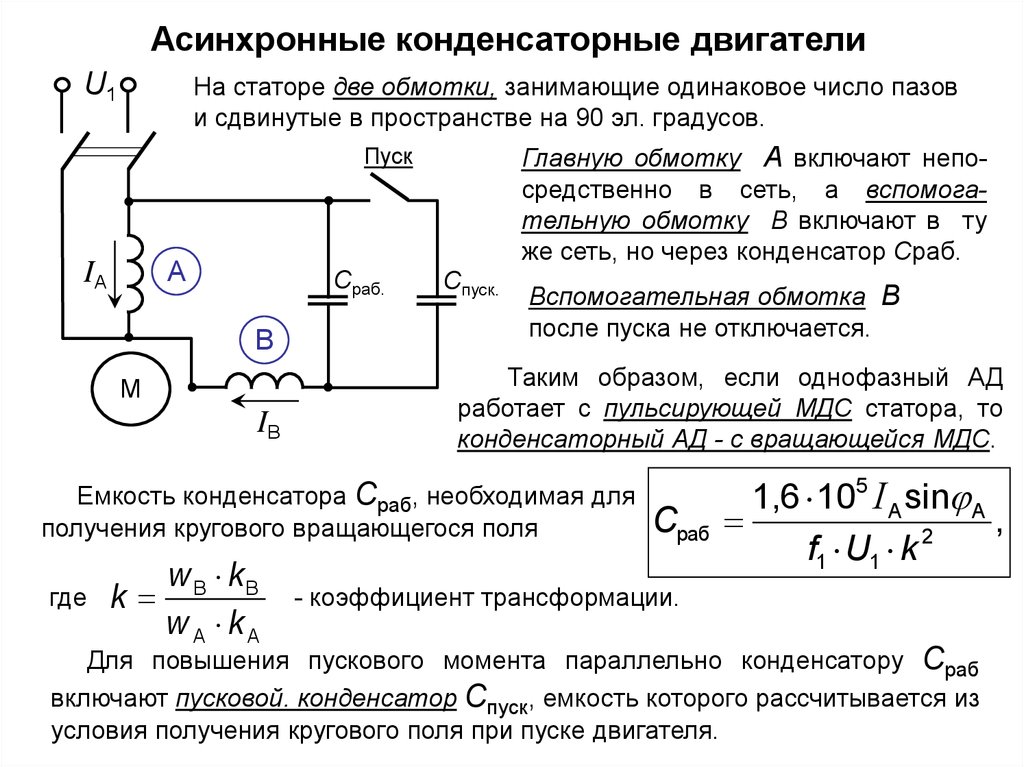
Асинхронные конденсаторные двигателиU1
На статоре две обмотки, занимающие одинаковое число пазов
и сдвинутые в пространстве на 90 эл. градусов.
Главную обмотку А включают непосредственно в сеть, а вспомогательную обмотку В включают в ту
же сеть, но через конденсатор Сраб.
Пуск
А
IА
Сраб.
В
М
IВ
Спуск.
Вспомогательная обмотка В
после пуска не отключается.
Таким образом, если однофазный АД
работает с пульсирующей МДС статора, то
конденсаторный АД - с вращающейся МДС.
Емкость конденсатора Сраб, необходимая для
получения кругового вращающегося поля
где
w B kB
k
w A kA
Сраб
1,6 105 I A sin A
,
2
f1 U1 k
- коэффициент трансформации.
Для повышения пускового момента параллельно конденсатору Сраб
включают пусковой. конденсатор Спуск, емкость которого рассчитывается из
условия получения кругового поля при пуске двигателя.