









 electronics
electronicsSimilar presentations:



")




 и микроконтроллерах")

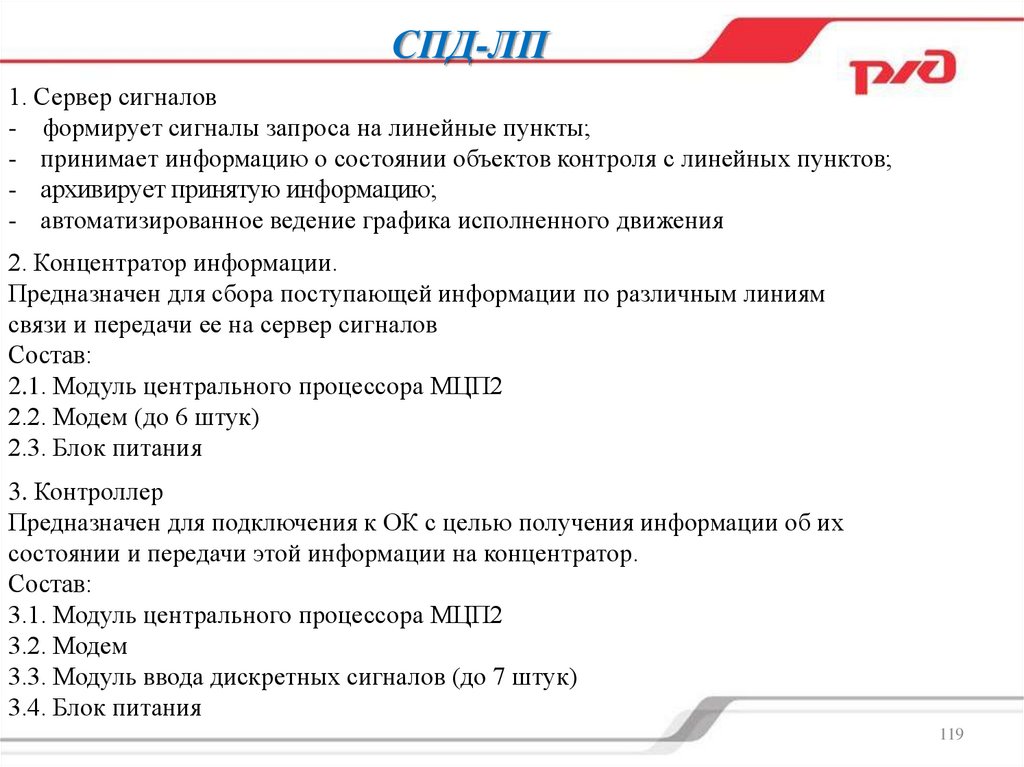
Микропроцессорные информационноуправляющие системы
1.
РОАТ Кафедра СУТИМикропроцессорные информационноуправляющие системы
(Для студентов РОАТ)
Лекции в презентациях
Лунев С. А.
Москва
1
2.
ЛИТЕРАТУРА1. Микропроцессорные информационно-управляющие системы железнодорожного
транспорта/А.В.Горелик, В.Ю.Горелик, А.Е.Ермаков, О.П.Ермакова. М.: РОАТ – 2011 г. 230 с.
2. Однокристальные микро-ЭВМ/А.В.Боборыкин, Г.П. Липовецкий и др. М.: МИКАП, 1994. 400 с.
3. Микроконтроллеры, архитектура, программирование, интерфейс. /В.Б. Бродин, М.И.
Шагурин. Справочник. М.: ЭКОМ, 1999, -398 с.
2
3.
Положительные свойства релейных систем1. Высокая устойчивость к электромагнитным помехам (особенно
возникающим при грозовых явлениях) и к климатическим факторам
(особенно к повышенной температуре)
2. Подтвержденные эксплуатацией высокие показатели
безопасности железнодорожных реле
3. Наглядность схем обеспечивающих безопасность, что позволяет
широкому кругу специалистов вносить изменения, и контролировать
условия обеспечения безопасности движения
4. Большой срок эксплуатации
Серьезные аргументы, чтобы в настоящее время полностью не отказываться
от реле
3
4.
Проблемы релейных систем1. Большой износ технических средств
2. Медленное внедрение современных технических средств и технологий:
- не удовлетворяют современным требованиям комплексной
автоматизации перевозочного процесса;
- сдерживают массовое внедрение информационных технологий
3. Не обеспечивают внедрение безлюдных технологий по обслуживанию
технических средств ЖАТ
4. Ограниченные возможности в решении ряда новых функциональных задач
(протоколирование действий ДСП, архивирование работы устройств с целью
анализа и выявления предотказных состояний, накопление маршрутов и их
реализация по времени или по очереди, контроль аналоговых параметров и их
передача в системы высшего порядка и др
5. Рост эксплуатационных затрат:
- большой объем устройств с истекшим сроком службы;
- низкая надежность элементной базы;
- отсутствие средств диагностики
Сдерживающий фактор при решении задач снижения
эксплуатационных расходов ОАО «РЖД»
4
5.
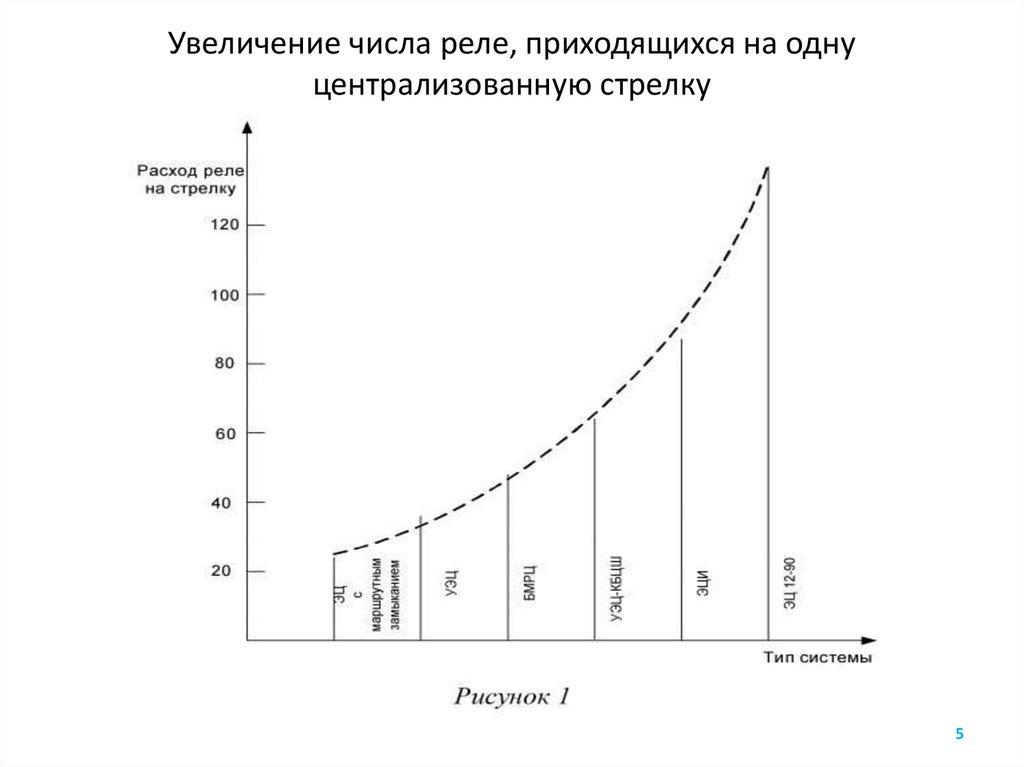
Увеличение числа реле, приходящихся на однуцентрализованную стрелку
5
6.
Эффективность микропроцессорных СЖАТ1. Сокращение площадей служебно-технических помещений – размещение
необходимой аппаратуры в малогабаритных компоновочных шкафах или модулях
2. Создание автоматизированного рабочего места дежурного по станции
(АРМ ДСП), в составе которого содержатся видеомониторы с клавиатурой
вместо громоздких пультов-табло и манипуляторов
3. Создание автоматизированного рабочего места электромеханика (АРМ ШН),
позволяющее более качественно решать вопросы технической диагностики
4. Расширение функциональных возможностей систем, таких как:
- выполнение функций контролируемых пунктов ДЦ;
- телеизмерение, диагностика;
- протоколирование и архивация (функции «черного ящика»)
5. Простое взаимодействие с любыми аппаратно-программными
комплексами для создания единой автоматизированной системы
управления перевозочным процессом
6. Сокращение объемов проектирования
6
7.
Проблемы внедрения МПИУС на сети железных дорогОсновные причины, усложняющие внедрение новых микропроцессорных систем:
- значительная степень избыточности, приводящая к снижению надёжности и
недопустимо высокой цене;
- необходимость резервирования оборудования, при этом должны быть разные
схемные и программные решения одной логической функции, мажоритарное
принятие решения;
- большая протяженность железных дорог и соответственно инерционность
внедрения;
- быстро изменяющая номенклатура изделий, что затрудняет обслуживание и
ремонт;
- суровые климатические условия повышают требования к качеству изготовления,
приёмки в эксплуатацию и к самой эксплуатации
- сложность в подготовке специалистов
7
8.
Микро-ЭВМ – основа информационноуправляющей системыМИКРОПРОЦЕССОР - самостоятельное или входящее в состав микроЭВМ устройство обработки информации, выполненное в виде одной или
нескольких больших интегральных схем.
Микропроцессор отдельно от других элементов микропроцессорного
устройства (МПУ) практически не используется (за исключением
однокристальных микро-ЭВМ). В составе микропроцессорного комплекта он
образует микро-ЭВМ.
микро-ЭВМ (микропроцессорная ЭВМ) - электронная вычислительная машина
основу, которой составляет микропроцессор, дополненный запоминающим
устройством, устройствами ввода-вывода данных и набором средств связи.
Отличается малыми габаритными размерами, удобством эксплуатации, низкой
стоимостью. микро-ЭВМ является универсальным, программно - управляемым
устройством, т. е. настраивается на выполнение тех или иных функций с
помощью хранимой в ее памяти программы.
8
9.
МИКРОПРОЦЕССОРНАЯ СИСТЕМА – множество микропроцессорныхэлементов, находящихся в отношениях и связях друг с другом, образующих
определенную целостность, единство, имеющих единый системный подход в
системотехнике, анализе и т. д..
Организация
микропроцессорных
информационно-управляющих
систем
определяется видом периферийного оборудования, возможностями подключения
дополнительных вычислительных устройств и способом связи основных
элементов системы между собой.
Обобщённая схема микроконтроллера нижнего уровня информационноуправляющей системы на основе однокристальной микро-ЭВМ может содержать
следующие функциональные узлы:
- микропроцессор (МП);
- внешний или внутренний генератор стабильной частоты (ЗГ);
- оперативное запоминающее устройство (ОЗУ);
- постоянное запоминающее устройство (ПЗУ);
9
10.
- параллельный порт ввода – вывода;- последовательный порт ввода – вывода;
- преобразователь напряжение – код (АЦП);
- преобразователь код – напряжение (ЦАП);
- гальваническую развязку между микро-ЭВМ и объектами управления и
контроля (ISO);
- усилители аналоговых сигналов (УАС);
- усилители дискретных сигналов (УДС);
- жидкокристаллический индикатор (ЖКИ);
- матричную клавиатуру (МКЛ);
- часы реального времени с независимым источником питания (TIME);
- блок питания (БП);
- другие (зависят от потребности).
В зависимости от поставленной задачи отдельные элементы архитектуры микроЭВМ могут отсутствовать.
10
11.
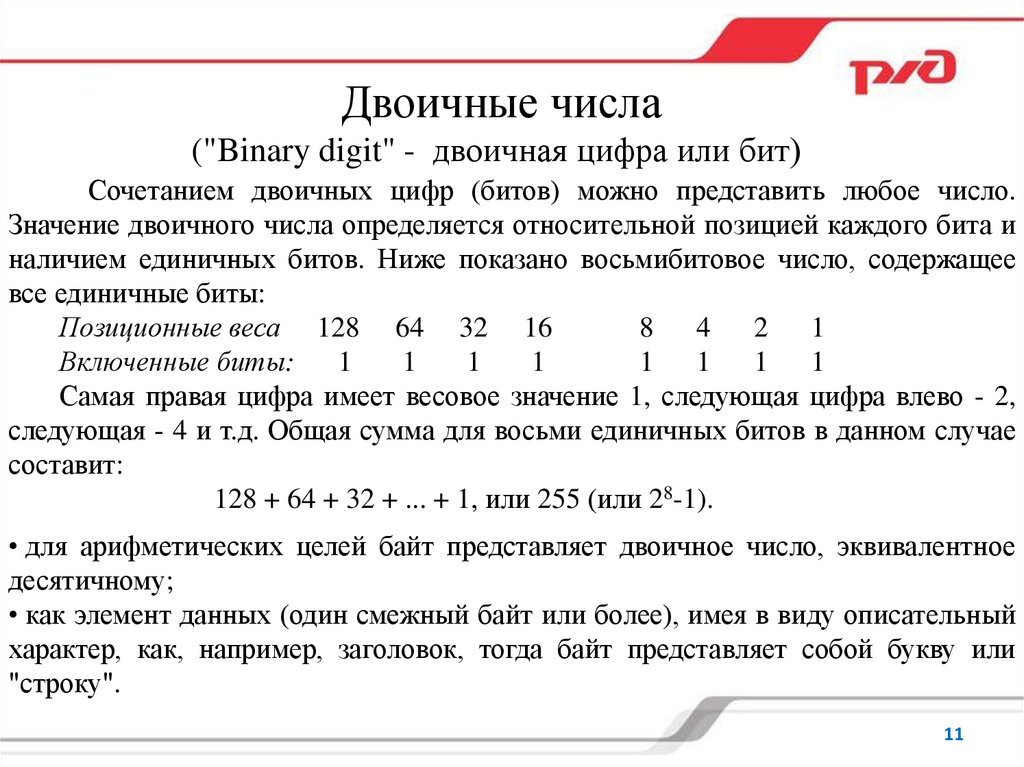
Двоичные числа("Binary digit" - двоичная цифра или бит)
Сочетанием двоичных цифр (битов) можно представить любое число.
Значение двоичного числа определяется относительной позицией каждого бита и
наличием единичных битов. Ниже показано восьмибитовое число, содержащее
все единичные биты:
Позиционные веса 128 64 32 16
8
4 2 1
Включенные биты:
1
1
1
1
1
1 1 1
Самая правая цифра имеет весовое значение 1, следующая цифра влево - 2,
следующая - 4 и т.д. Общая сумма для восьми единичных битов в данном случае
составит:
128 + 64 + 32 + ... + 1, или 255 (или 28-1).
• для арифметических целей байт представляет двоичное число, эквивалентное
десятичному;
• как элемент данных (один смежный байт или более), имея в виду описательный
характер, как, например, заголовок, тогда байт представляет собой букву или
"строку".
11
12.
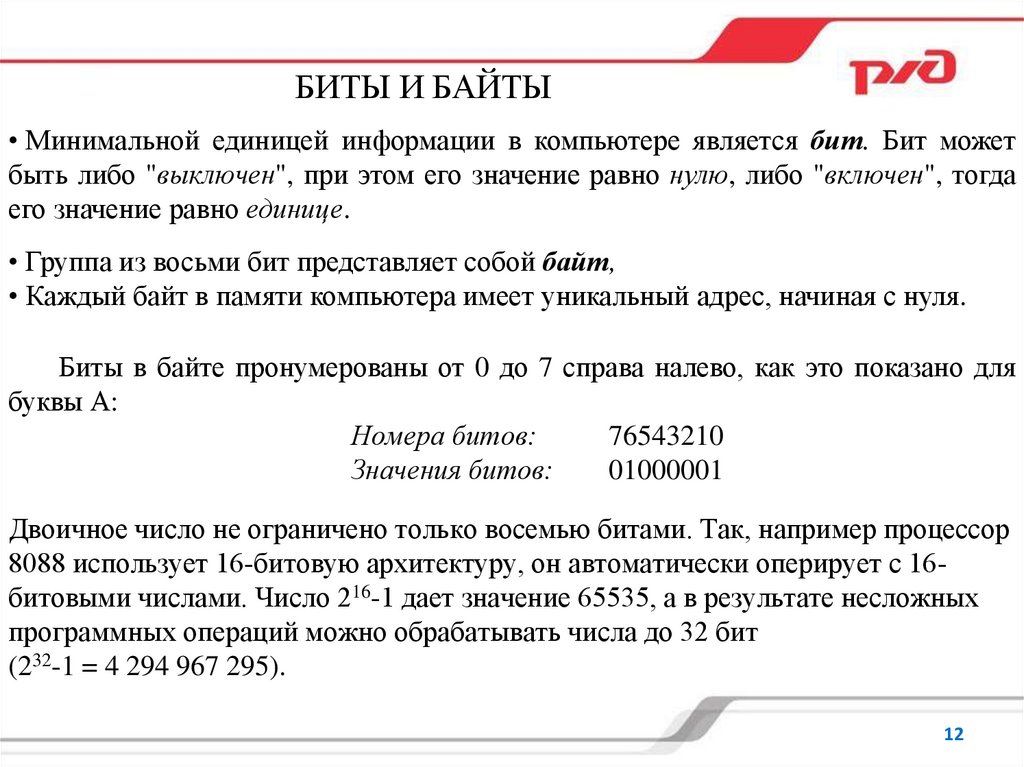
БИТЫ И БАЙТЫ• Минимальной единицей информации в компьютере является бит. Бит может
быть либо "выключен", при этом его значение равно нулю, либо "включен", тогда
его значение равно единице.
• Группа из восьми бит представляет собой байт,
• Каждый байт в памяти компьютера имеет уникальный адрес, начиная с нуля.
Биты в байте пронумерованы от 0 до 7 справа налево, как это показано для
буквы А:
Номера битов:
76543210
Значения битов:
01000001
Двоичное число не ограничено только восемью битами. Так, например процессор
8088 использует 16-битовую архитектуру, он автоматически оперирует с 16битовыми числами. Число 216-1 дает значение 65535, а в результате несложных
программных операций можно обрабатывать числа до 32 бит
(232-1 = 4 294 967 295).
12
13.
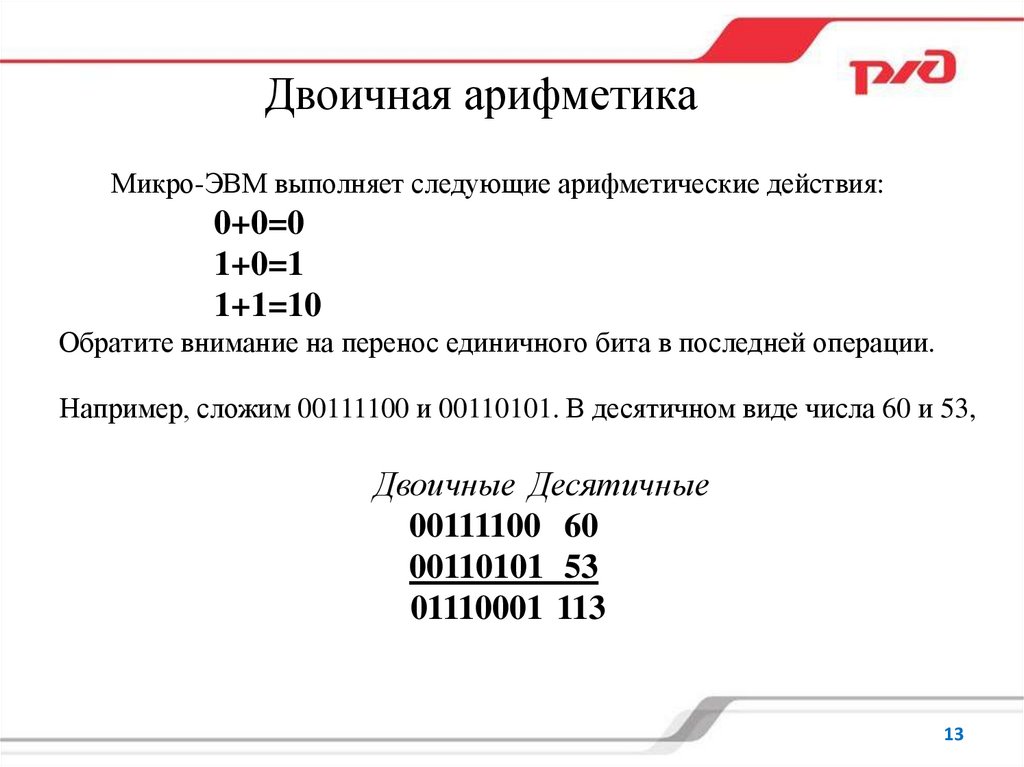
Двоичная арифметикаМикро-ЭВМ выполняет следующие арифметические действия:
0+0=0
1+0=1
1+1=10
Обратите внимание на перенос единичного бита в последней операции.
Например, сложим 00111100 и 00110101. В десятичном виде числа 60 и 53,
Двоичные Десятичные
00111100 60
00110101 53
01110001 113
13
14.
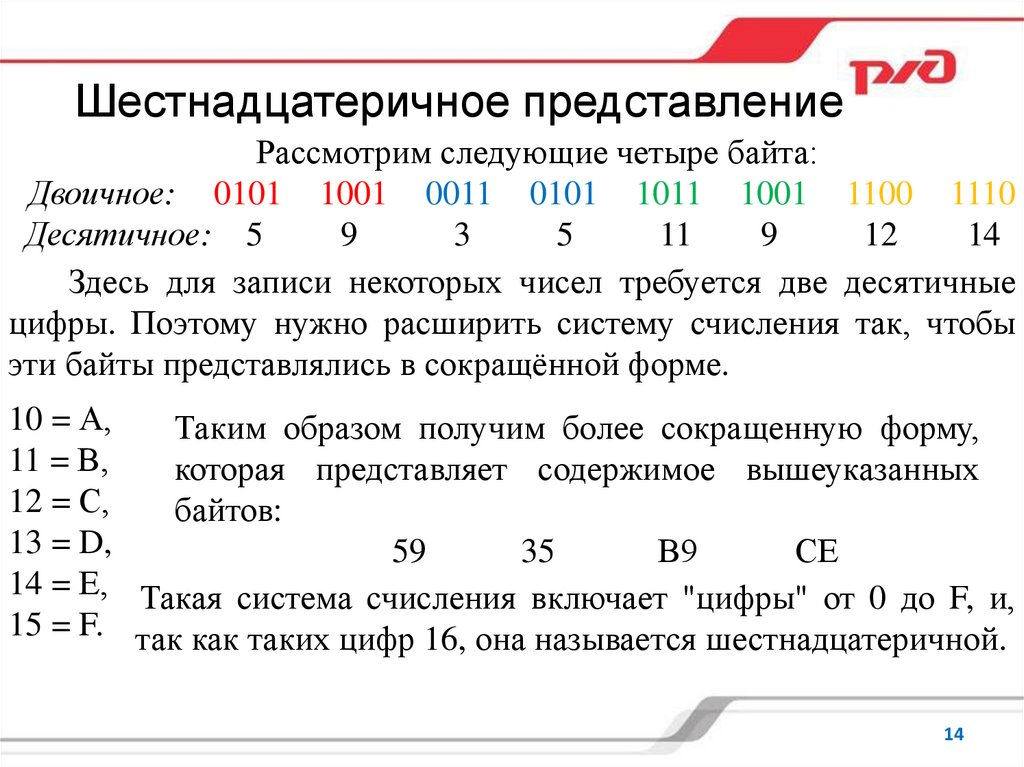
Шестнадцатеричное представлениеРассмотрим следующие четыре байта:
Двоичное: 0101 1001 0011 0101 1011 1001 1100 1110
Десятичное: 5
9
3
5
11
9
12
14
Здесь для записи некоторых чисел требуется две десятичные
цифры. Поэтому нужно расширить систему счисления так, чтобы
эти байты представлялись в сокращённой форме.
10 = А,
Таким образом получим более сокращенную форму,
11 = В,
которая представляет содержимое вышеуказанных
12 = С,
байтов:
13 = D,
59
35
В9
СЕ
14 = Е, Такая система счисления включает "цифры" от 0 до F, и,
15 = F. так как таких цифр 16, она называется шестнадцатеричной.
14
15.
Шестнадцатеричное представлениеТаблица
Двоич. Дес. Шест. Двоич. Дес. Шест.
0000
0
0
1000
8
8
0001
1
1
1001
9
9
0010
2
2
1010
10
А
0011
3
3
1011
11
В
0100
4
4
1100
12
С
0101
5
5
1101
13
D
0110
6
6
1110
14
E
0111
7
7
1111
15
F
15
16.
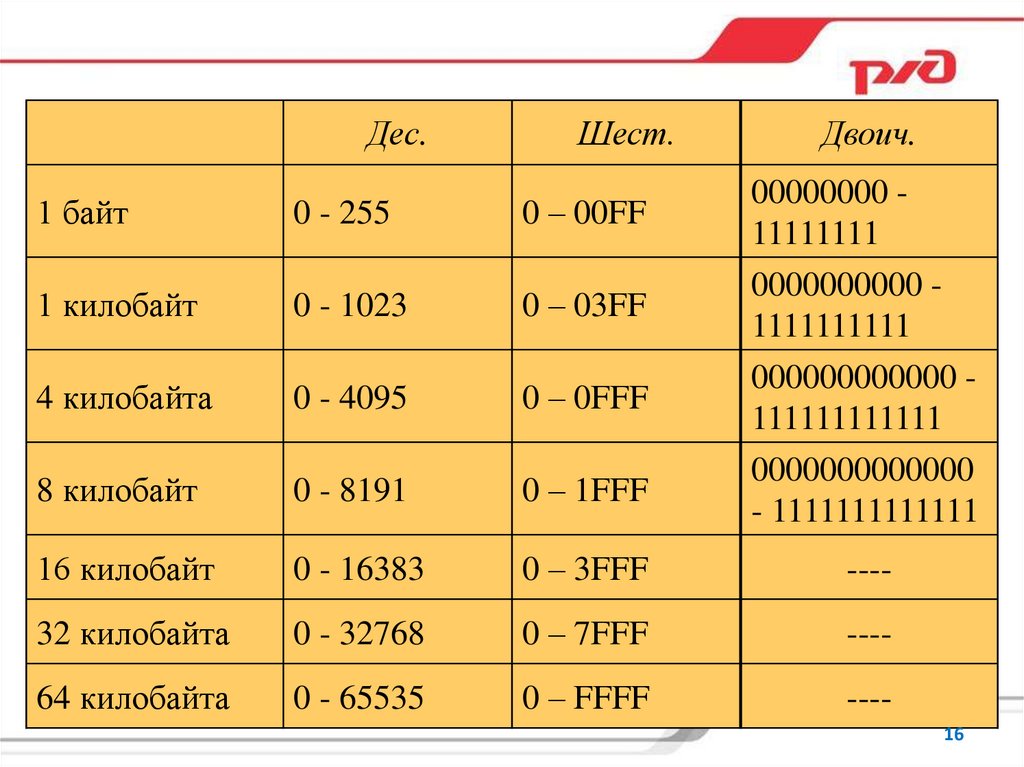
Дес.Шест.
Двоич.
1 байт
0 - 255
0 – 00FF
00000000 11111111
1 килобайт
0 - 1023
0 – 03FF
4 килобайта
0 - 4095
0 – 0FFF
0000000000 1111111111
000000000000 111111111111
8 килобайт
0 - 8191
0 – 1FFF
0000000000000
- 1111111111111
16 килобайт
0 - 16383
0 – 3FFF
----
32 килобайта
0 - 32768
0 – 7FFF
----
64 килобайта
0 - 65535
0 – FFFF
---16
17.
Существует множество микро-ЭВМ с различными характеристиками и современем их параметры фирмы-разработчики улучшают, но все они имеют общие
принципы построения. Для предметного рассмотрения выберем одну из
наиболее популярных - однокристальную микро-ЭВМ серии MCS-51
Микро-ЭВМ семейства Intel 8051 имеют следующие
особенности:
- внутреннюю память программ ПЗУ объемом 4 Кбайт;
аппаратные
- внутреннее ОЗУ объемом 128 байт;
- четыре двунаправленных побитно настраиваемых восьмиразрядных порта
ввода-вывода;
- два 16-разрядных таймера-счетчика;
- встроенный тактовый генератор;
- возможность адресации 64 Кбайт внешней памяти программ и 64 Кбайт
внешней памяти данных;
- две линии запросов на прерывание от внешних устройств;
- интерфейс для последовательного обмена информацией с другими
микроконтроллерами или персональными компьютерами.
17
18.
1819.
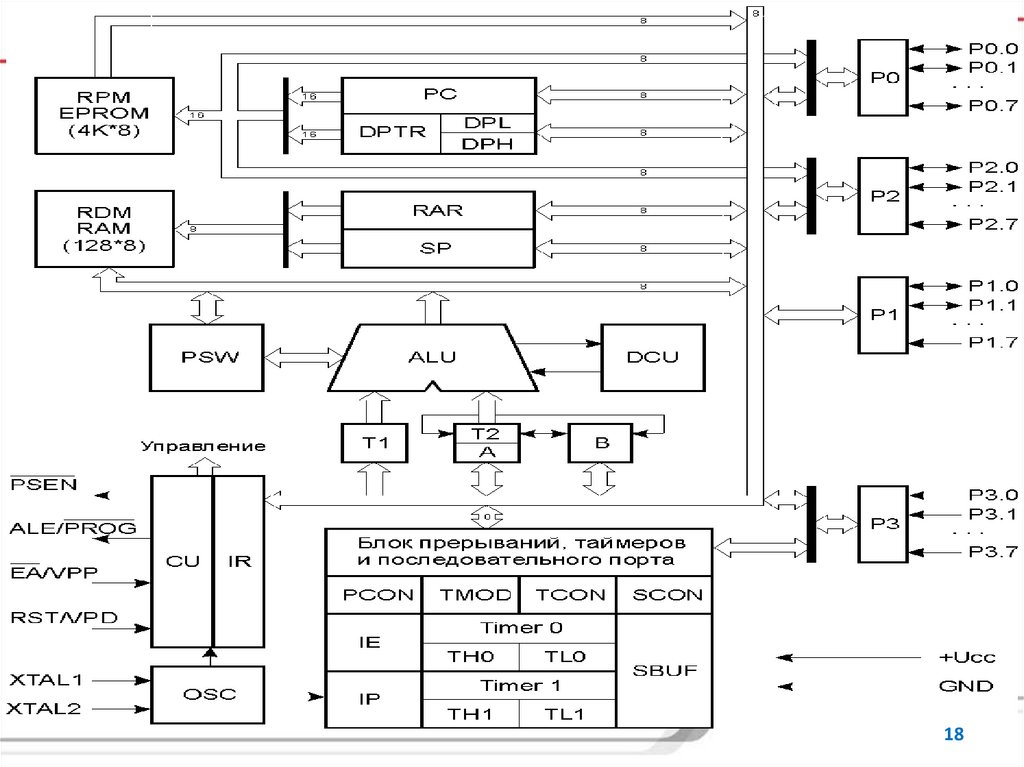
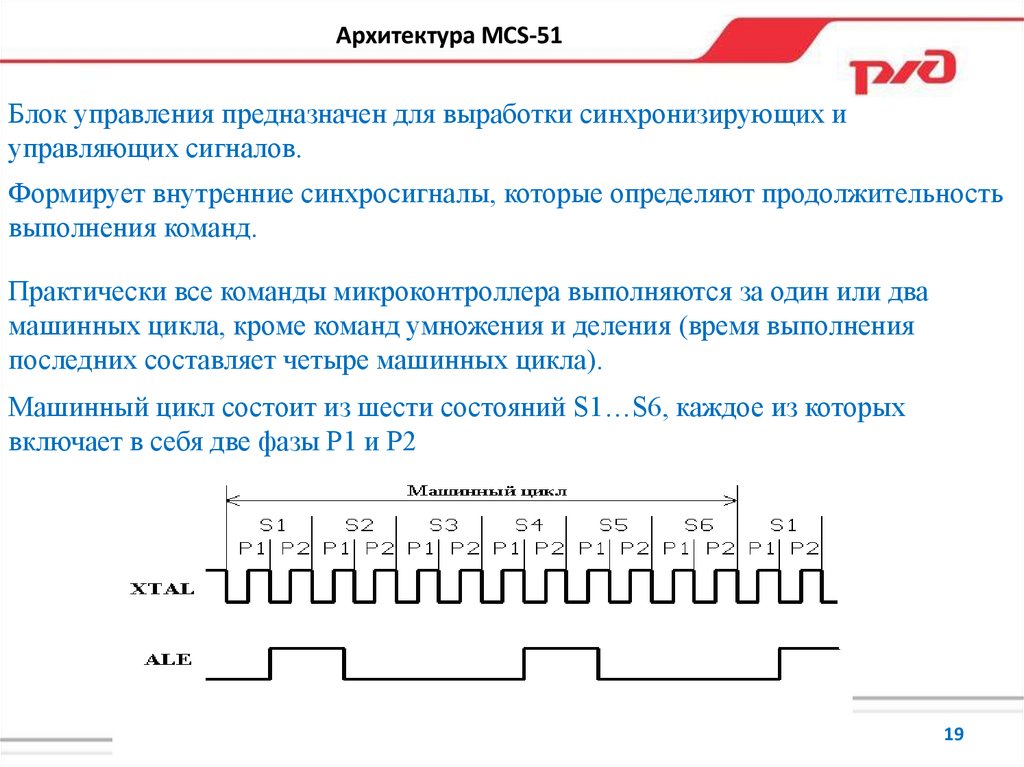
Архитектура MCS-51Блок управления предназначен для выработки синхронизирующих и
управляющих сигналов.
Формирует внутренние синхросигналы, которые определяют продолжительность
выполнения команд.
Практически все команды микроконтроллера выполняются за один или два
машинных цикла, кроме команд умножения и деления (время выполнения
последних составляет четыре машинных цикла).
Машинный цикл состоит из шести состояний S1…S6, каждое из которых
включает в себя две фазы P1 и P2
19
20.
Длительность каждой фазы равна периоду следования синхроимпульсов, которыйзадается частотой кварцевого резонатора, подключаемого к выводам XTAL1 и
XTAL2 микроконтроллера
Таким образом, длительность каждого машинного цикла ТЦ равна двенадцати
периодам тактовых импульсов
Tц 12 1 f BQ
где f BQ частота синхронизации МКC-51
Для синхронизации работы остальных компонентов МПС можно использовать
сигнал ALE, который дважды формируется в течении одного машинного цикла
20
21.
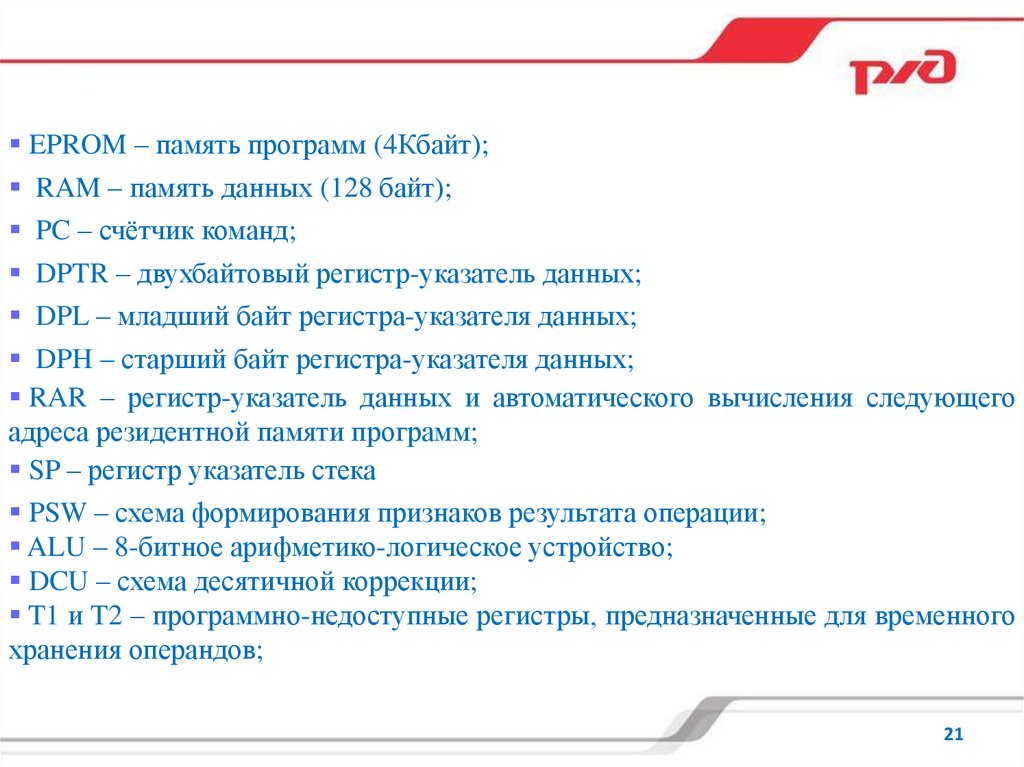
EPROM – память программ (4Кбайт);RAM – память данных (128 байт);
PC – счётчик команд;
DPTR – двухбайтовый регистр-указатель данных;
DPL – младший байт регистра-указателя данных;
DPH – старший байт регистра-указателя данных;
RAR – регистр-указатель данных и автоматического вычисления следующего
адреса резидентной памяти программ;
SP – регистр указатель стека
PSW – схема формирования признаков результата операции;
ALU – 8-битное арифметико-логическое устройство;
DCU – схема десятичной коррекции;
T1 и T2 – программно-недоступные регистры, предназначенные для временного
хранения операндов;
21
22.
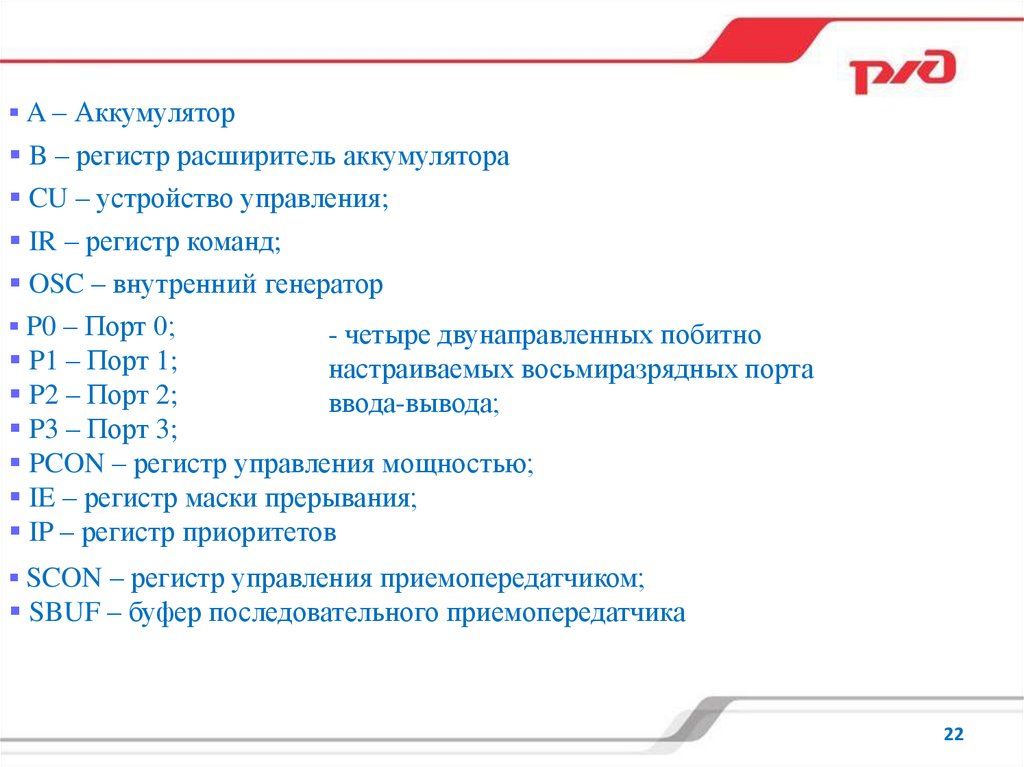
A – АккумуляторB – регистр расширитель аккумулятора
CU – устройство управления;
IR – регистр команд;
OSC – внутренний генератор
P0 – Порт 0;
- четыре двунаправленных побитно
P1 – Порт 1;
настраиваемых восьмиразрядных порта
P2 – Порт 2;
ввода-вывода;
P3 – Порт 3;
PCON – регистр управления мощностью;
IE – регистр маски прерывания;
IP – регистр приоритетов
SCON – регистр управления приемопередатчиком;
SBUF – буфер последовательного приемопередатчика
22
23.
TMOD – регистр режимов таймеров счетчиков;TCON – регистр управления статуса таймеров;
TIMER0 – таймер 0;
TH0 – старший байт таймера 0;
TL0 – младший байт таймера 0;
TIMER1 – таймер 1;
TH1 – старший байт таймера 1;
TL1 – младший байт таймера 1.
23
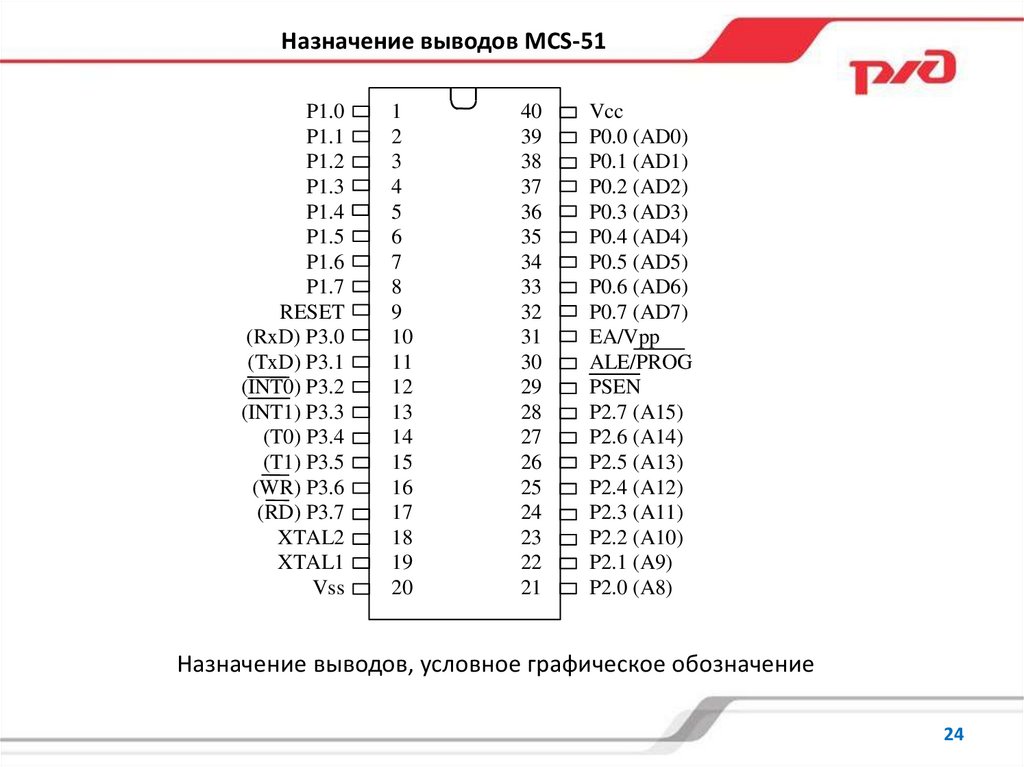
24.
Назначение выводов MCS-51P1.0
P1.1
P1.2
P1.3
P1.4
P1.5
P1.6
P1.7
RESET
(RxD) P3.0
(TxD) P3.1
(INT0) P3.2
(INT1) P3.3
(T0) P3.4
(T1) P3.5
(WR) P3.6
(RD) P3.7
XTAL2
XTAL1
Vss
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
40
39
38
37
36
35
34
33
32
31
30
29
28
27
26
25
24
23
22
21
Vcc
P0.0 (AD0)
P0.1 (AD1)
P0.2 (AD2)
P0.3 (AD3)
P0.4 (AD4)
P0.5 (AD5)
P0.6 (AD6)
P0.7 (AD7)
EA/Vpp
ALE/PROG
PSEN
P2.7 (A15)
P2.6 (A14)
P2.5 (A13)
P2.4 (A12)
P2.3 (A11)
P2.2 (A10)
P2.1 (A9)
P2.0 (A8)
Назначение выводов, условное графическое обозначение
24
25.
Vss – потенциал общего провода ("земли");Vcc – основное напряжение питания +5 В;
XTAL1, XTAL2 – выводы для подключения кварцевого резонатора;
RESET – вход общего сброса микроконтроллера;
PSEN – разрешение внешней памяти программ, выдается только при обращении к
внешнему ПЗУ;
ALE – строб адреса внешней памяти;
ЕА – отключение внутренней программной памяти, уровень 0 на этом входе
заставляет микроконтроллер выполнять программу только из внешнего ПЗУ,
игнорируя внутреннее;
P0 – восьми битный двунаправленный порт ввода/вывода информации: при
работе с внешними ОЗУ и ПЗУ по линиям порта в режиме временного
мультиплексирования выдается адрес внешней памяти, после чего
осуществляется передача или прием данных;
P1 – восьми битный двунаправленный порт ввода/вывода: каждый разряд порта
может быть запрограммирован как на ввод, так и на вывод информации,
независимо от состояния других разрядов, также этот порт используется при
программировании внутренней памяти программ;
25
26.
P2 – восьми битный двунаправленный порт, аналогичный Р1; кроме того, выводыэтого порта используются для выдачи адресной информации при обращении к
внешней памяти программ или данных (если используется 16-битовая адресация
последней).
Р3 – восьми битный двунаправленный порт, аналогичный Р1; кроме того, выводы
этого порта могут выполнять ряд альтернативных функций, которые
используются при работе таймеров, порта последовательного ввода-вывода,
контроллера прерываний, и внешней памяти программ и данных:
RxD – последовательные данные приёмника;
TxD – последовательные данные передатчика;
INT0 – вход внешнего прерывания 0;
INT1 – вход внешнего прерывания 1;
T0 – вход таймера/счётчика 0;
T1 – вход таймера/счётчика 1;
WR – выход стробирующего сигнала при записи во внешнюю память;
RD – выход стробирующего сигнала при чтении из внешней памяти.
26
27.
Схема включения микро-ЭВММинимальная схема включения
микро-ЭВМ семейства MCS-51
При подаче питания формируется импульс
сброса RESET. В программном счетчике
устанавливается адрес первой ячейки
внутренней памяти программ, дальнейшая
работа процессора определяется кодами ПЗУ.
27
28.
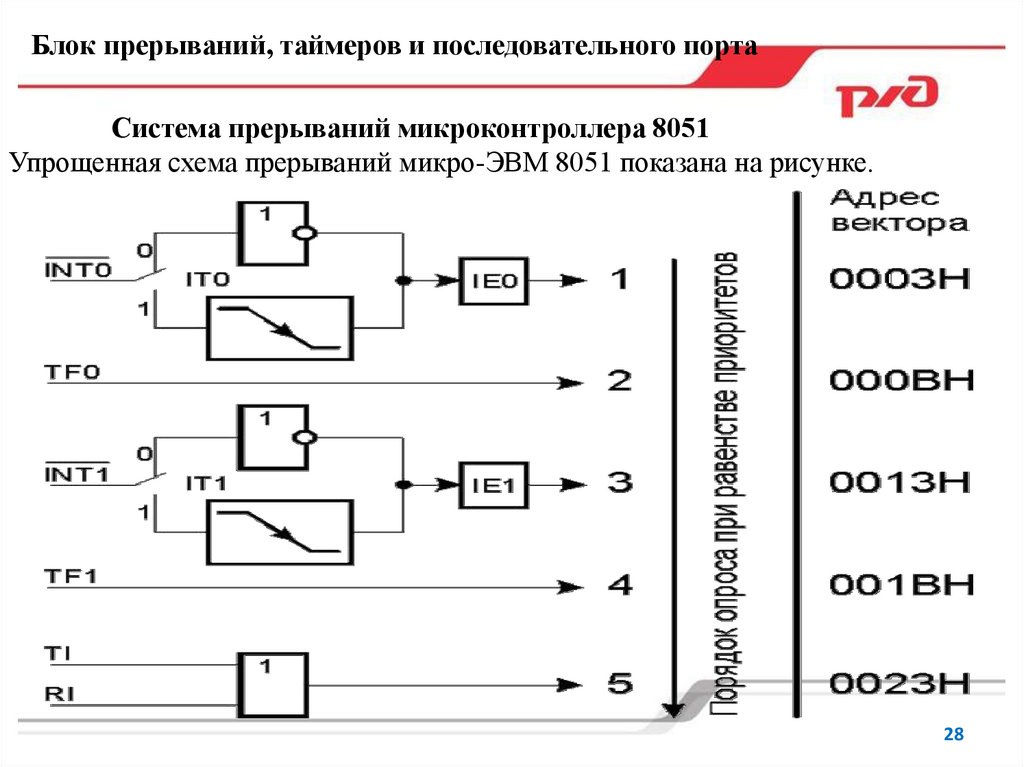
Блок прерываний, таймеров и последовательного портаСистема прерываний микроконтроллера 8051
Упрощенная схема прерываний микро-ЭВМ 8051 показана на рисунке.
28
29.
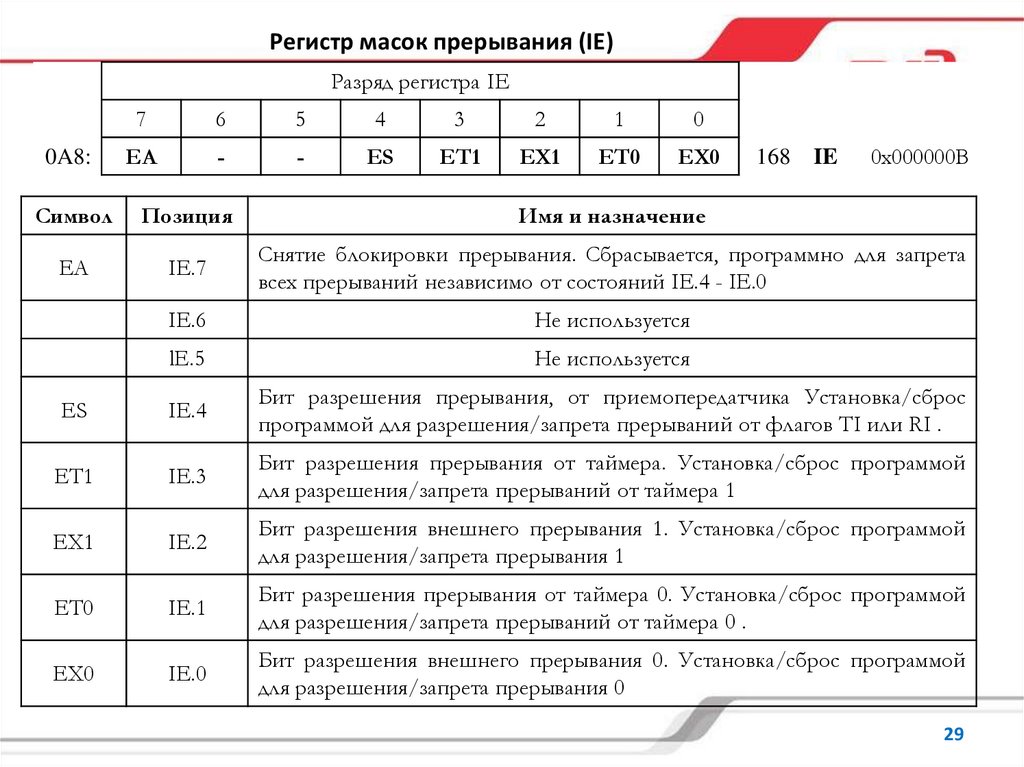
Регистр масок прерывания (IE)Разряд регистра IE
0A8:
7
6
5
4
3
2
1
0
EA
-
-
ES
ET1
EX1
ET0
EX0
168
IE
0x000000B
Символ
Позиция
Имя и назначение
EA
IE.7
Снятие блокировки прерывания. Сбрасывается, программно для запрета
всех прерываний независимо от состояний IE.4 - IE.0
IE.6
Не используется
lE.5
Не используется
ES
IE.4
Бит разрешения прерывания, от приемопередатчика Установка/сброс
программой для разрешения/запрета прерываний от флагов TI или RI .
ET1
IE.3
Бит разрешения прерывания от таймера. Установка/сброс программой
для разрешения/запрета прерываний от таймера 1
EX1
IE.2
Бит разрешения внешнего прерывания 1. Установка/сброс программой
для разрешения/запрета прерывания 1
ET0
IE.1
Бит разрешения прерывания от таймера 0. Установка/сброс программой
для разрешения/запрета прерываний от таймера 0 .
EX0
IE.0
Бит разрешения внешнего прерывания 0. Установка/сброс программой
для разрешения/запрета прерывания 0
29
30.
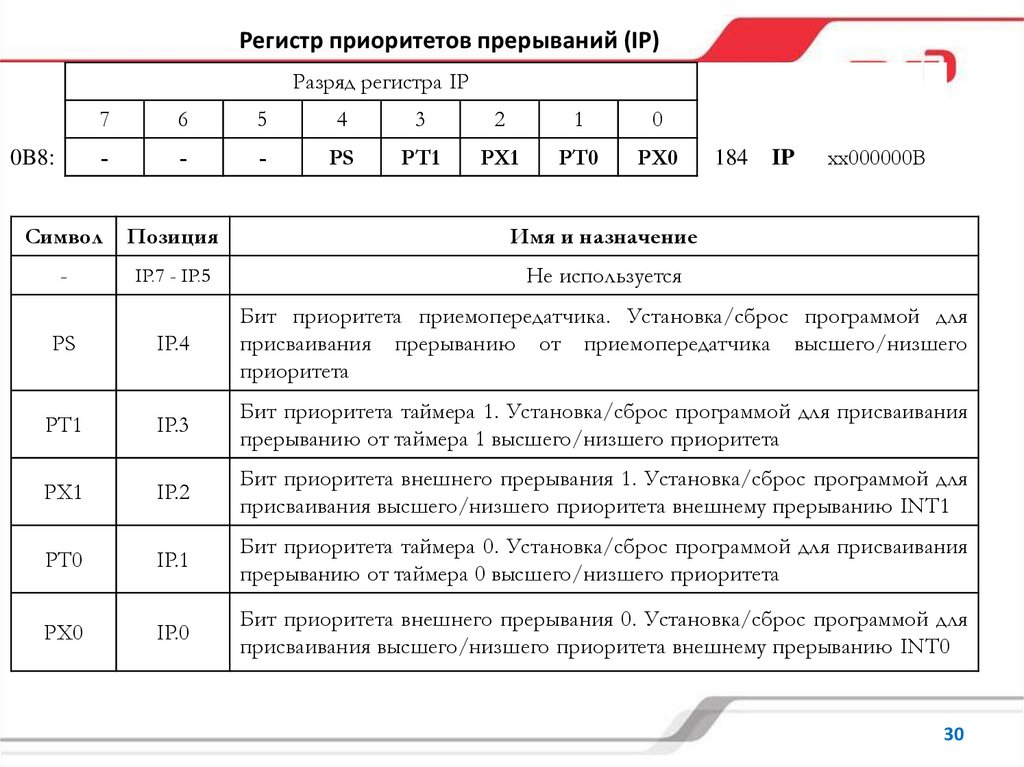
Регистр приоритетов прерываний (IP)Разряд регистра IP
0B8:
7
6
5
4
3
2
1
0
-
-
-
PS
PT1
PX1
PT0
PX0
184
IP
xx000000B
Символ
Позиция
Имя и назначение
-
IP.7 - IP.5
Не используется
PS
IP.4
Бит приоритета приемопередатчика. Установка/сброс программой для
присваивания прерыванию от приемопередатчика высшего/низшего
приоритета
РТ1
IP.3
Бит приоритета таймера 1. Установка/сброс программой для присваивания
прерыванию от таймера 1 высшего/низшего приоритета
РХ1
IP.2
Бит приоритета внешнего прерывания 1. Установка/сброс программой для
присваивания высшего/низшего приоритета внешнему прерыванию INT1
РТ0
IP.1
Бит приоритета таймера 0. Установка/сброс программой для присваивания
прерыванию от таймера 0 высшего/низшего приоритета
РХ0
IP.0
Бит приоритета внешнего прерывания 0. Установка/сброс программой для
присваивания высшего/низшего приоритета внешнему прерыванию INT0
30
31.
Особенности обслуживания прерыванийСистема прерываний формирует аппаратный вызов соответствующей
подпрограммы обслуживания, если она не заблокирована одним из следующих
условий:
в данный момент обслуживается запрос прерывания равного или высокого
уровня приоритета;
текущий машинный цикл – не последний в цикле выполняемой команды;
выполняется команда возврата из подпрограммы или любая команда, связанная
с обращением к регистрам IЕ или IP.
По аппаратно сформированному коду вызова система прерывания помещает в
стек только содержимое счетчика команд (PC) и загружает в него адрес вектора
соответствующей подпрограммы обслуживания.
По адресу вектора должна быть расположена команда безусловной передачи
управления к начальному адресу подпрограммы обслуживания прерывания.
Подпрограммы обслуживания прерывания должны завершаться командой возврата, по
которой в счетчик команд перезагружается из стека сохраненный адрес возврата в
основную программу.
31
32.
Таймеры / счетчики микро-ЭВМ семейства 8051В базовых моделях семейства имеются два программируемых 16-битных
таймера/счетчика (T/C0 и T/C1), которые могут быть использованы как в качестве
таймеров, так и в качестве счетчиков внешних событий.
В первом случае содержимое соответствующего таймера/счетчика (Т/С)
инкрементируется в каждом машинном цикле, т.е. через каждые 12 периодов
колебаний кварцевого резонатора.
Во втором оно инкрементируется под воздействием перехода из 1 в 0 внешнего
входного сигнала, подаваемого на соответствующий вывод (T0, T1) микро-ЭВМ
Так как на распознавание периода требуются два машинных цикла, максимальная
частота подсчета входных сигналов равна 1/24 частоты резонатора.
На длительность периода входных сигналов ограничений сверху нет. Для
гарантированного прочтения входной сигнал должен удерживать значение 1, как
минимум, в течение одного машинного цикла микро-ЭВМ.
Для управления режимами работы Т/С и для организации их взаимодействия с
системой прерываний используются два регистра специальных функций (TCON
и TMOD)
32
33.
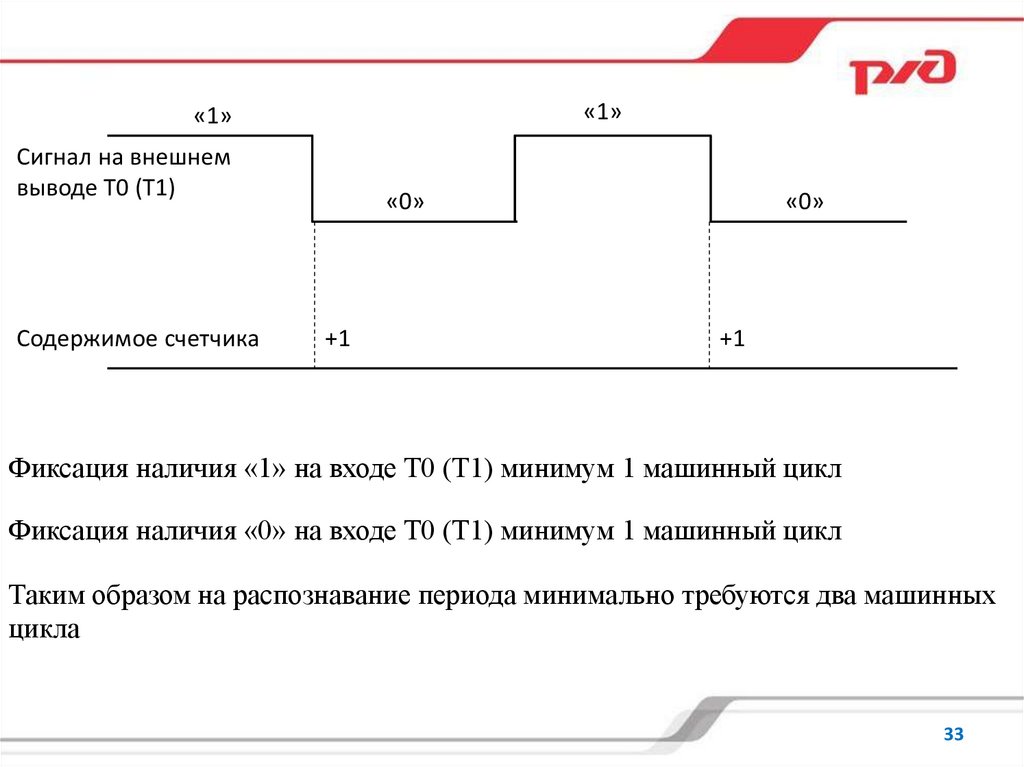
«1»«1»
Сигнал на внешнем
выводе Т0 (Т1)
Содержимое счетчика
«0»
+1
«0»
+1
Фиксация наличия «1» на входе Т0 (Т1) минимум 1 машинный цикл
Фиксация наличия «0» на входе Т0 (Т1) минимум 1 машинный цикл
Таким образом на распознавание периода минимально требуются два машинных
цикла
33
34.
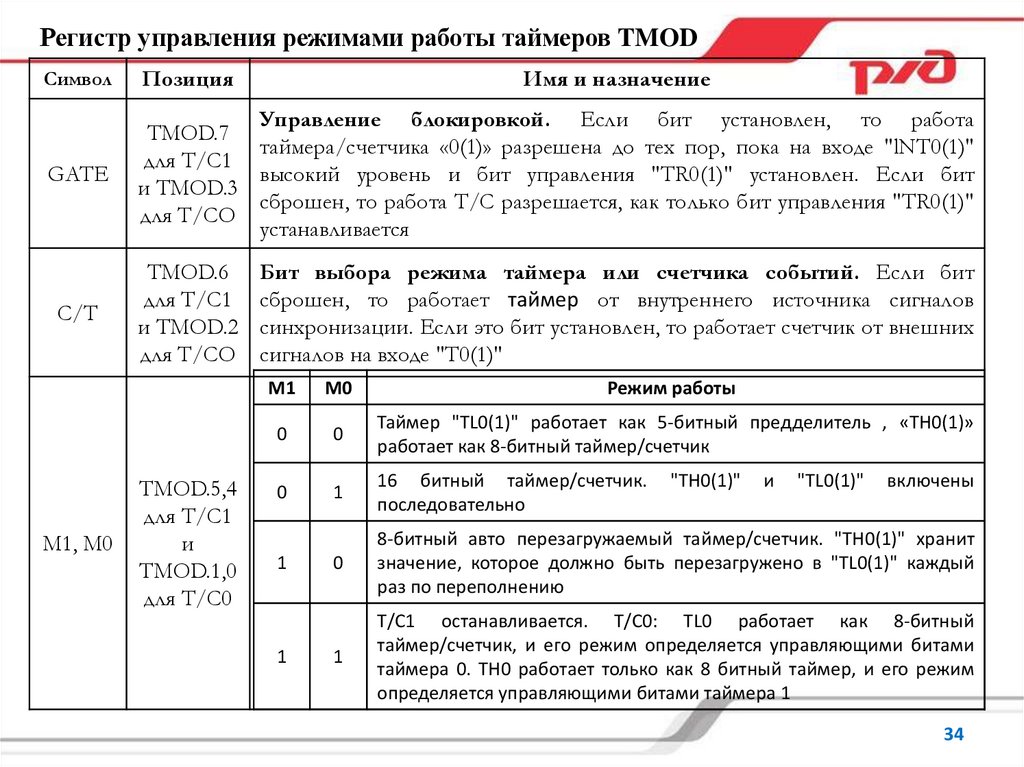
Регистр управления режимами работы таймеров TMODСимвол
Позиция
GATE
Управление блокировкой. Если бит установлен, то работа
TMOD.7
таймера/счетчика «0(1)» разрешена до тех пор, пока на входе "lNT0(1)"
для Т/С1
высокий уровень и бит управления "TR0(1)" установлен. Если бит
и TMOD.3
сброшен, то работа Т/С разрешается, как только бит управления "TR0(1)"
для Т/СО
устанавливается
С/Т
M1, М0
TMOD.6
для T/C1
и TMOD.2
для Т/СО
TMOD.5,4
для T/C1
и
TMOD.1,0
для Т/С0
Имя и назначение
Бит выбора режима таймера или счетчика событий. Если бит
сброшен, то работает таймер от внутреннего источника сигналов
синхронизации. Если это бит установлен, то работает счетчик от внешних
сигналов на входе "T0(1)"
M1
M0
Режим работы
0
0
Таймер "TL0(1)" работает как 5-битный предделитель , «TН0(1)»
работает как 8-битный таймер/счетчик
0
1
16 битный таймер/счетчик.
последовательно
0
8-битный авто перезагружаемый таймер/счетчик. "TH0(1)" хранит
значение, которое должно быть перезагружено в "TL0(1)" каждый
раз по переполнению
1
Т/С1 останавливается. Т/С0: TL0 работает как 8-битный
таймер/счетчик, и его режим определяется управляющими битами
таймера 0. TH0 работает только как 8 битный таймер, и его режим
определяется управляющими битами таймера 1
1
1
"TH0(1)"
и
"TL0(1)"
включены
34
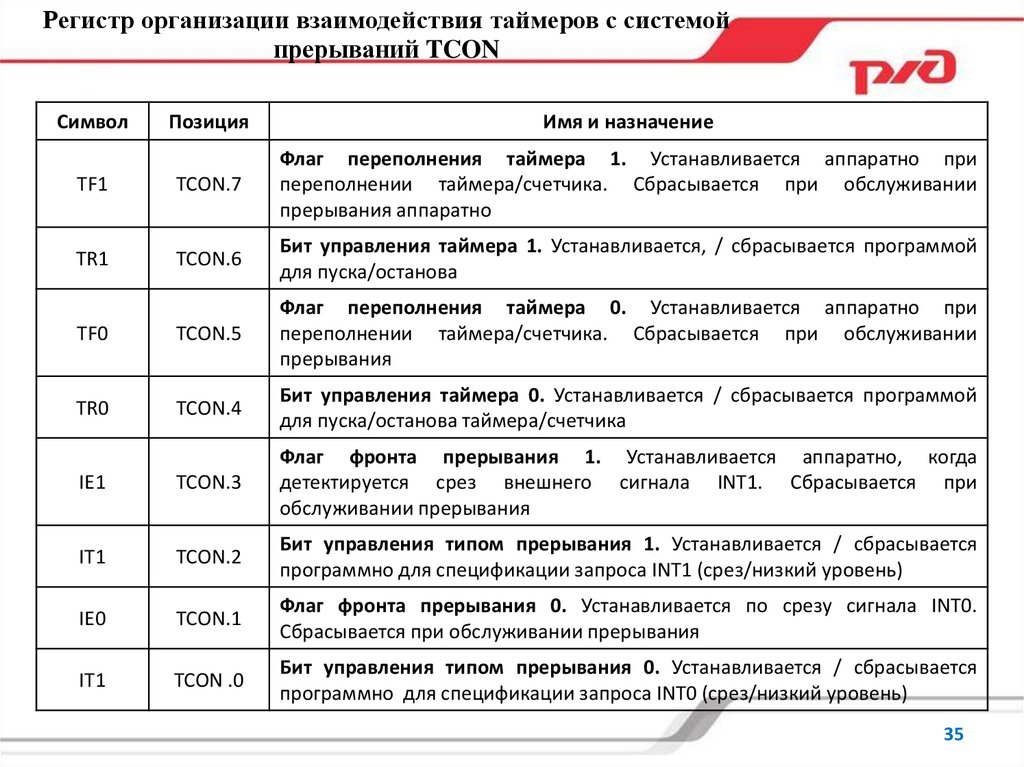
35.
Регистр организации взаимодействия таймеров с системойпрерываний TCON
Символ
Позиция
Имя и назначение
TF1
TCON.7
Флаг переполнения таймера 1. Устанавливается аппаратно при
переполнении таймера/счетчика. Сбрасывается при обслуживании
прерывания аппаратно
TR1
TCON.6
Бит управления таймера 1. Устанавливается, / сбрасывается программой
для пуска/останова
TF0
TCON.5
Флаг переполнения таймера 0. Устанавливается аппаратно при
переполнении таймера/счетчика. Сбрасывается при обслуживании
прерывания
TR0
TCON.4
Бит управления таймера 0. Устанавливается / сбрасывается программой
для пуска/останова таймера/счетчика
IE1
TCON.3
Флаг фронта прерывания 1. Устанавливается аппаратно, когда
детектируется срез внешнего сигнала INT1. Сбрасывается при
обслуживании прерывания
IT1
TCON.2
Бит управления типом прерывания 1. Устанавливается / сбрасывается
программно для спецификации запроса INT1 (срез/низкий уровень)
IE0
TCON.1
Флаг фронта прерывания 0. Устанавливается по срезу сигнала INT0.
Сбрасывается при обслуживании прерывания
IT1
TCON .0
Бит управления типом прерывания 0. Устанавливается / сбрасывается
программно для спецификации запроса INT0 (срез/низкий уровень)
35
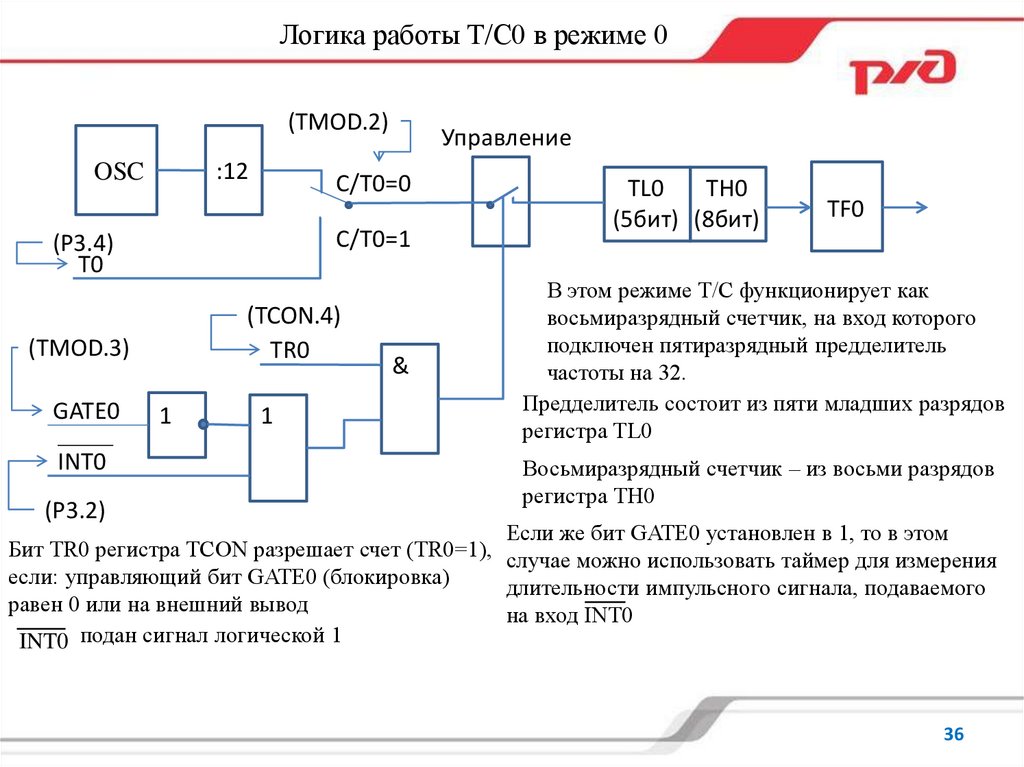
36.
Логика работы Т/С0 в режиме 0(TMOD.2)
:12
OSC
С/Т0=0
С/Т0=1
(P3.4)
Т0
(TCON.4)
ТR0
(TMOD.3)
GATE0
INT0
(P3.2)
Управление
1
1
&
ТL0
ТH0
(5бит) (8бит)
TF0
В этом режиме Т/C функционирует как
восьмиразрядный счетчик, на вход которого
подключен пятиразрядный предделитель
частоты на 32.
Предделитель состоит из пяти младших разрядов
регистра TL0
Восьмиразрядный счетчик – из восьми разрядов
регистра ТН0
Если же бит GATE0 установлен в 1, то в этом
Бит TR0 регистра TCON разрешает счет (TR0=1), случае можно использовать таймер для измерения
если: управляющий бит GATE0 (блокировка)
длительности импульсного сигнала, подаваемого
равен 0 или на внешний вывод
на вход INT0
подан
сигнал
логической
1
INT0
36
37.
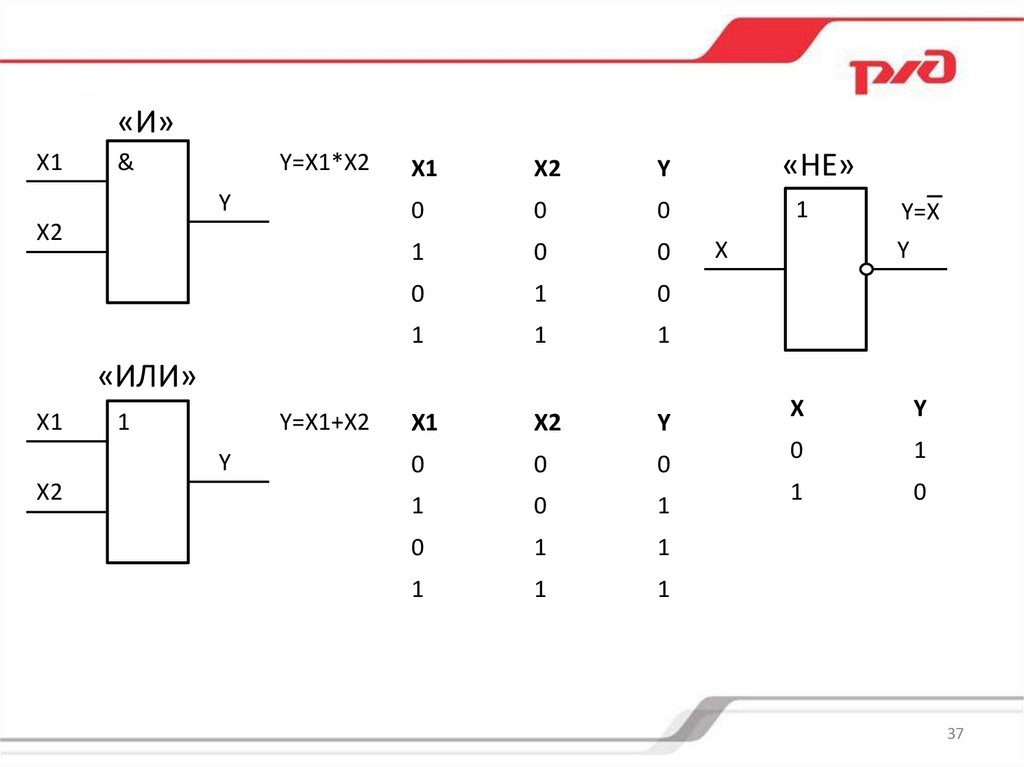
«И»Х1
&
Y=X1*X2
Y
Х2
X1
X2
Y
0
0
0
1
0
0
0
1
0
1
1
1
X1
X2
Y
0
0
0
1
0
1
0
1
1
1
1
1
«НЕ»
1
Y=X
Y
X
Y
0
1
1
0
Х
«ИЛИ»
Х1
1
Y=X1+X2
Y
Х2
37
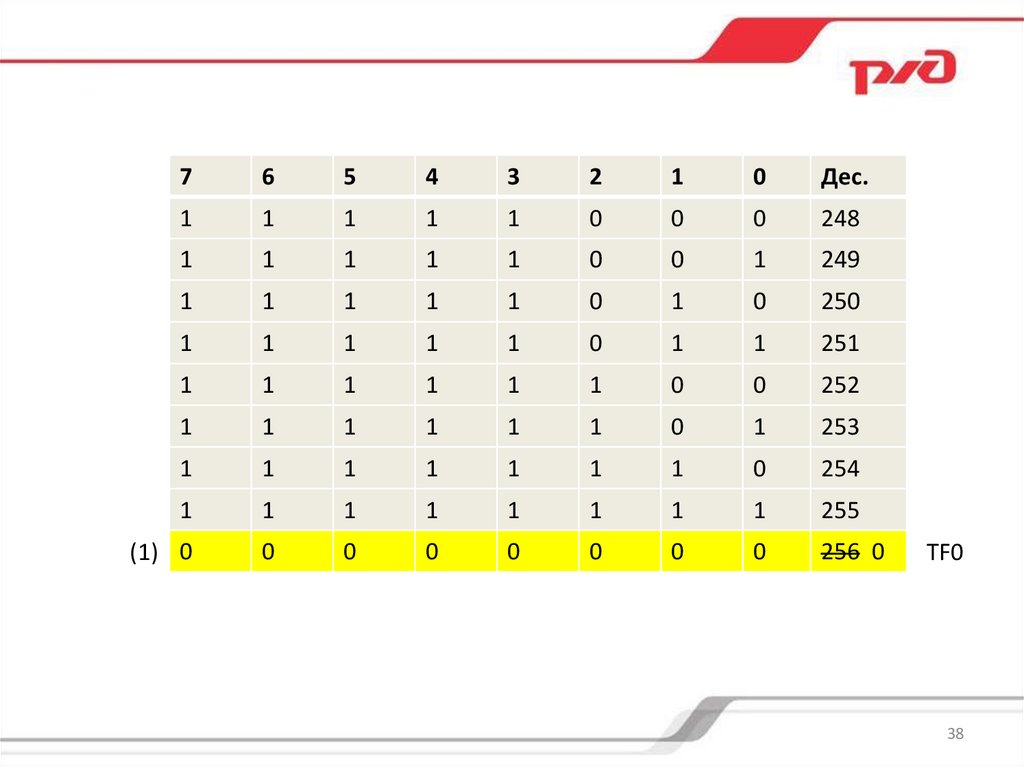
38.
76
5
4
3
2
1
0
Дес.
1
1
1
1
1
0
0
0
248
1
1
1
1
1
0
0
1
249
1
1
1
1
1
0
1
0
250
1
1
1
1
1
0
1
1
251
1
1
1
1
1
1
0
0
252
1
1
1
1
1
1
0
1
253
1
1
1
1
1
1
1
0
254
1
1
1
1
1
1
1
1
255
(1) 0
0
0
0
0
0
0
0
256 0
ТF0
38
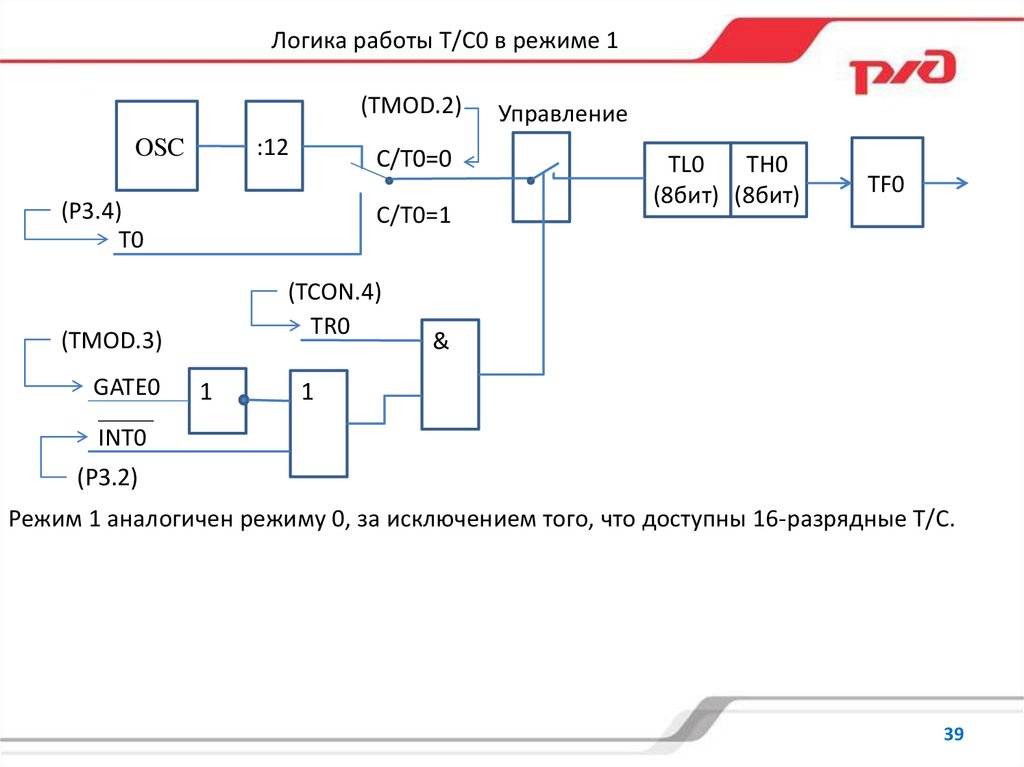
39.
Логика работы Т/С0 в режиме 1(TMOD.2)
:12
OSC
С/Т0=0
(P3.4)
Т0
С/Т0=1
(TCON.4)
ТR0
(TMOD.3)
GATE0
1
Управление
ТL0
ТH0
(8бит) (8бит)
TF0
&
1
INT0
(P3.2)
Режим 1 аналогичен режиму 0, за исключением того, что доступны 16-разрядные Т/C.
39
40.
Логика работы Т/С1 в режиме 2(TMOD.6)
:12
OSC
С/Т1=0
(P3.5)
Т1
(TMOD.7)
GATE1
INT1
(P3.3)
С/Т1=1
(TCON.6)
ТR1
1
Управление
ТL1
(8 бит)
TF1
&
&
1
ТH1
(8 бит)
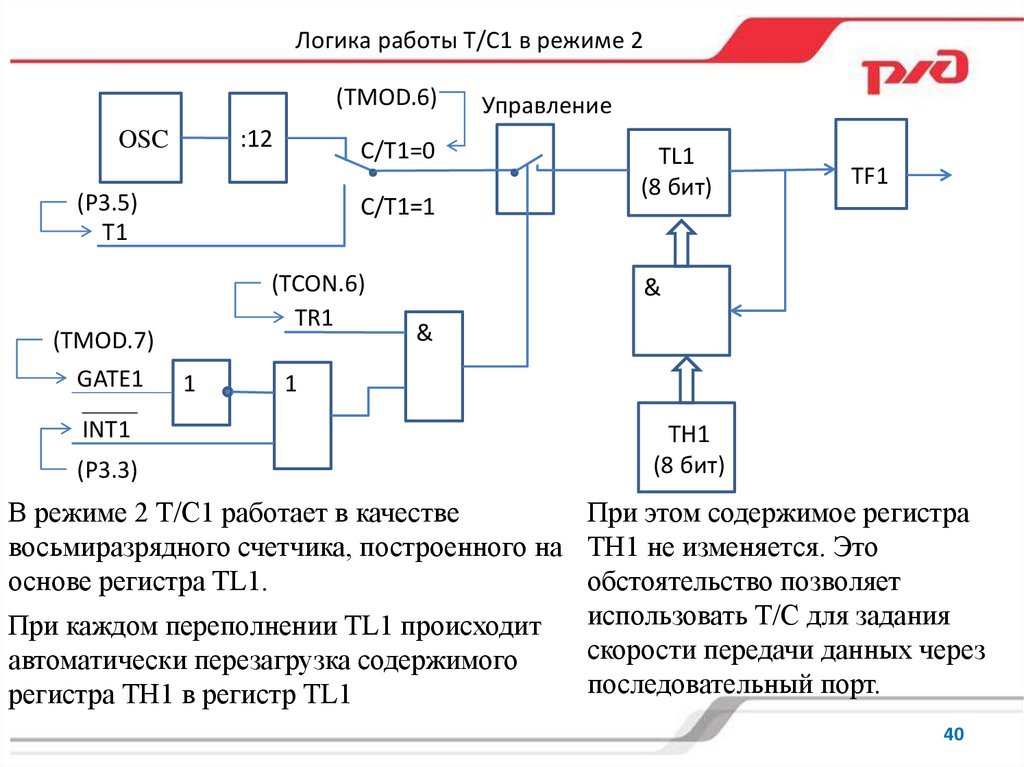
В режиме 2 Т/C1 работает в качестве
При этом содержимое регистра
восьмиразрядного счетчика, построенного на ТН1 не изменяется. Это
основе регистра TL1.
обстоятельство позволяет
использовать Т/С для задания
При каждом переполнении TL1 происходит
скорости передачи данных через
автоматически перезагрузка содержимого
последовательный порт.
регистра ТН1 в регистр ТL1
40
41.
Логика работы Т/С0 в режиме 3ТR1
(TCON.6)
Управление
:12
OSC
С/Т0=0
ТL0
(8бит)
TF0
(TMOD.2)
(TCON.4)
(TMOD.3)
GATE0
TF1
Управление
С/Т0=1
Т0
(P3.4)
ТH0
(8бит)
1
ТR0
&
1
INT0
(P3.2)
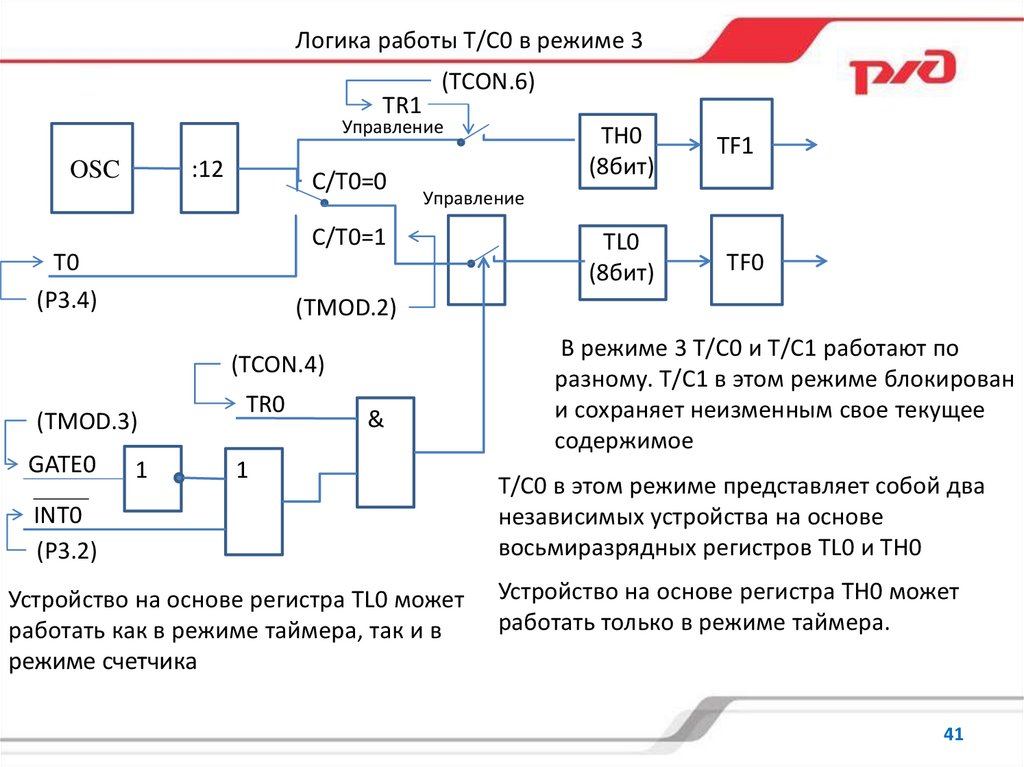
Устройство на основе регистра TL0 может
работать как в режиме таймера, так и в
режиме счетчика
В режиме 3 Т/C0 и Т/C1 работают по
разному. Т/C1 в этом режиме блокирован
и сохраняет неизменным свое текущее
содержимое
Т/С0 в этом режиме представляет собой два
независимых устройства на основе
восьмиразрядных регистров TL0 и TН0
Устройство на основе регистра TH0 может
работать только в режиме таймера.
41
42.
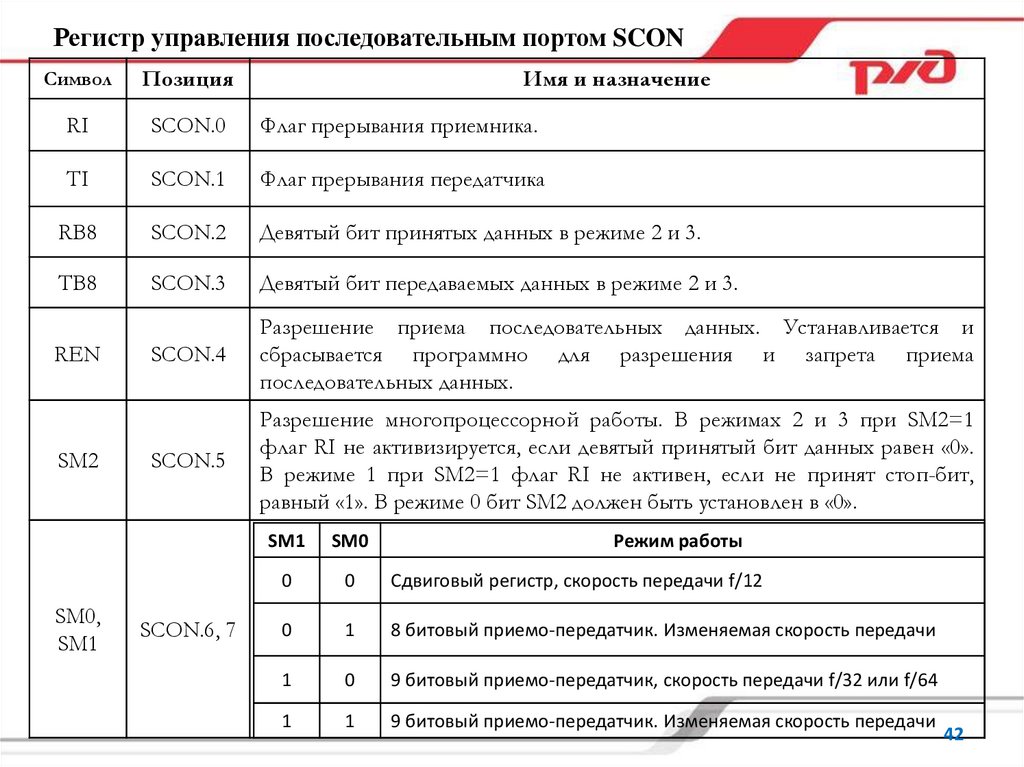
Регистр управления последовательным портом SCONСимвол
Позиция
RI
SCON.0
Флаг прерывания приемника.
TI
SCON.1
Флаг прерывания передатчика
RB8
SCON.2
Девятый бит принятых данных в режиме 2 и 3.
TB8
SCON.3
Девятый бит передаваемых данных в режиме 2 и 3.
SCON.4
Разрешение приема последовательных данных. Устанавливается и
сбрасывается программно для разрешения и запрета приема
последовательных данных.
SCON.5
Разрешение многопроцессорной работы. В режимах 2 и 3 при SM2=1
флаг RI не активизируется, если девятый принятый бит данных равен «0».
В режиме 1 при SM2=1 флаг RI не активен, если не принят стоп-бит,
равный «1». В режиме 0 бит SM2 должен быть установлен в «0».
REN
SM2
SM0,
SM1
SCON.6, 7
Имя и назначение
SM1
SM0
Режим работы
0
0
Сдвиговый регистр, скорость передачи f/12
0
1
8 битовый приемо-передатчик. Изменяемая скорость передачи
1
0
9 битовый приемо-передатчик, скорость передачи f/32 или f/64
1
1
9 битовый приемо-передатчик. Изменяемая скорость передачи
42
43.
Блок последовательного интерфейсаБлок последовательного интерфейса предназначен для организации ввода/вывода
информации по последовательному каналу
Последовательный интерфейс (последовательный порт) микроконтроллера может
работать в одном из четырех режимов:
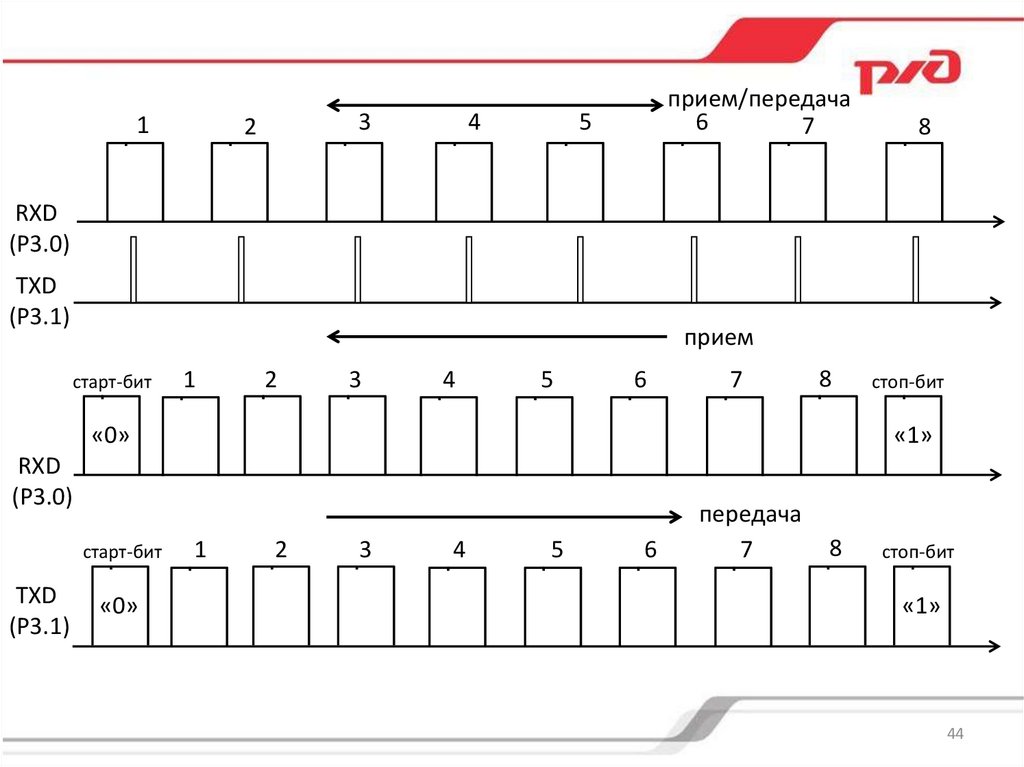
Режим 0. Информация передается и принимается через вход приемника RxD
(вывод Р3.0). Через выход передатчика TxD (вывод Р3.1) выдаются импульсы
синхронизации, стробирующие каждый передаваемый или принимаемый бит
информации. Формат посылки – 8 бит. Частота приема и передачи равна fcpu/12.
Режим 1. Информация передается через выход передатчика TxD (Р3.1), а
принимается через вход приемника RxD (Р3.0). Формат посылки – 10 бит: стартбит (логический ноль), восемь бит данных и стоп-бит (логическая единица).
Частота приема и передачи задается Т/С 1.
43
44.
13
2
4
прием/передача
6
7
5
8
RXD
(P3.0)
TXD
(P3.1)
прием
старт-бит
1
2
3
4
5
6
7
8
«0»
«1»
RXD
(P3.0)
старт-бит
TXD
(P3.1)
«0»
стоп-бит
1
2
3
4
5
6
передача
7
8
стоп-бит
«1»
44
45.
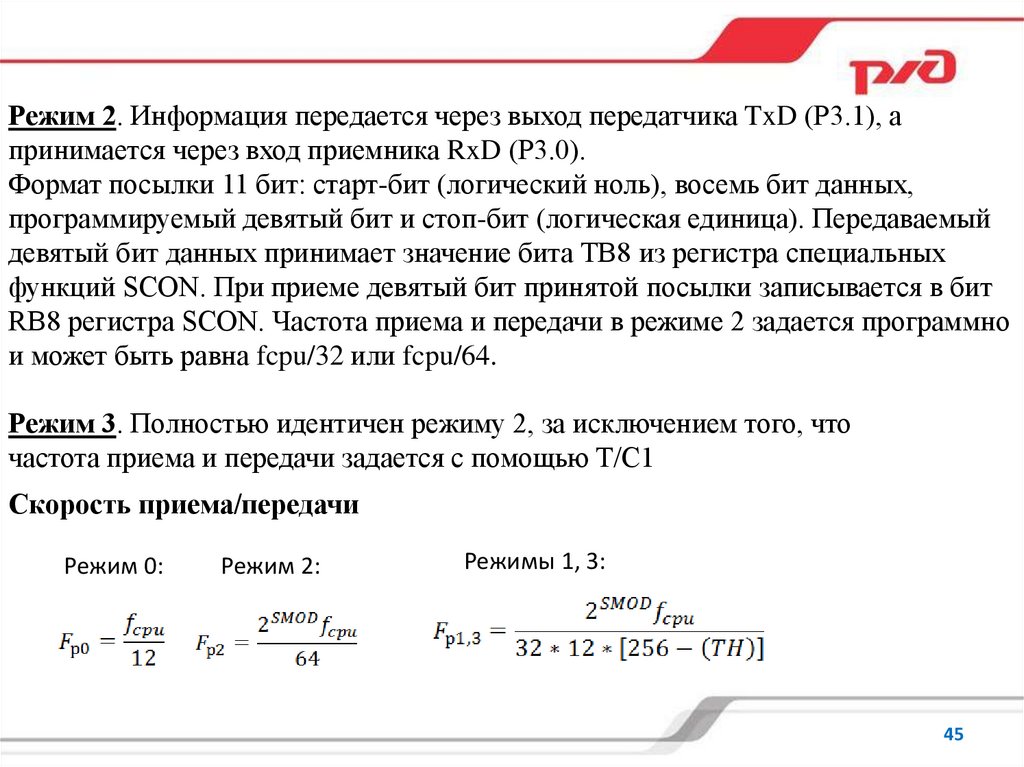
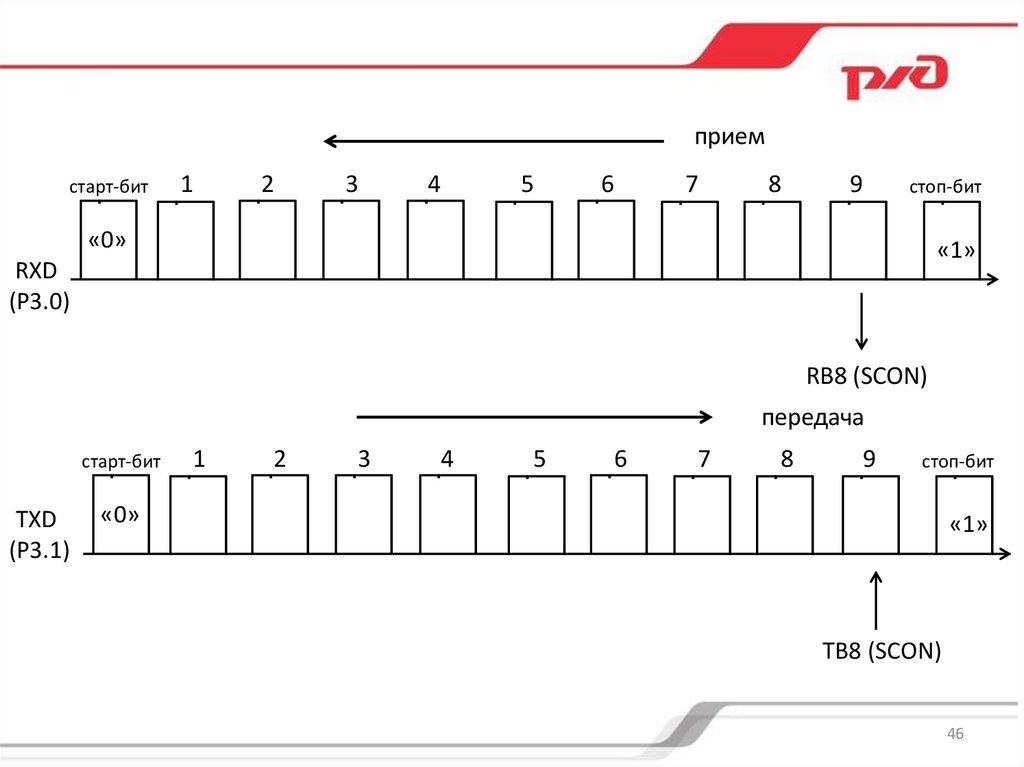
Режим 2. Информация передается через выход передатчика TxD (Р3.1), апринимается через вход приемника RxD (Р3.0).
Формат посылки 11 бит: старт-бит (логический ноль), восемь бит данных,
программируемый девятый бит и стоп-бит (логическая единица). Передаваемый
девятый бит данных принимает значение бита ТВ8 из регистра специальных
функций SCON. При приеме девятый бит принятой посылки записывается в бит
RB8 регистра SCON. Частота приема и передачи в режиме 2 задается программно
и может быть равна fcpu/32 или fcpu/64.
Режим 3. Полностью идентичен режиму 2, за исключением того, что
частота приема и передачи задается с помощью Т/С1
Скорость приема/передачи
Режим 0:
Режим 2:
Режимы 1, 3:
45
46.
приемстарт-бит
1
2
3
4
5
6
7
8
9
стоп-бит
«0»
«1»
RXD
(P3.0)
RВ8 (SCON)
передача
старт-бит
TXD
(P3.1)
1
2
3
4
5
6
7
8
9
стоп-бит
«0»
«1»
ТВ8 (SCON)
46
47.
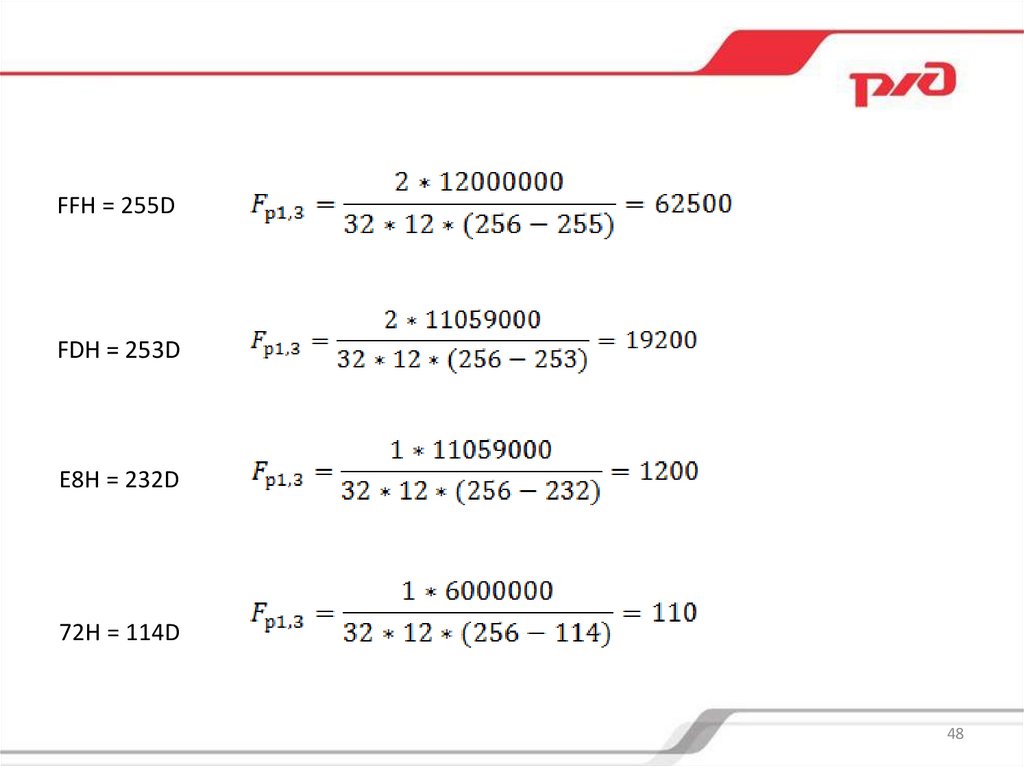
В таблице приведен ряд стандартных скоростей последовательногообмена и то, как они могут быть реализованы с помощью T/C1 в режимах
1 и 3.
Режимы работы
последовательного
порта
Частота
генератора, МГц
Скорость, кБод
Бит SMOD
Регистр
ТН1
0
12
1000
х
х
2
12
375
1
х
1, 3
12
62.5
1
FFH
1, 3
11,059
19.2
1
FDH
1, 3
11,059
4.8
0
FAH
1, 3
11,059
1.2
0
E8H
1, 3
6
0.110
0
72H
47
48.
FFH = 255DFDH = 253D
E8H = 232D
72H = 114D
48
49.
Интерфейсы последовательноговвода вывода информации
Электрические интерфейсы RS-232, RS-422, RS-423 (V.10), RS-485, токовая петля
Последовательные интерфейсы различаются способом передачи электрических сигналов.
Существует ряд международных стандартов: RS-232C, RS-422A, RS-423A, RS-485
RS-232C / V.28
L=12 м
9
V=20 Кбит/с
В RS-232 есть передатчик и приемник
сигналов, которые имеются в каждом
устройстве
Выход передатчика одного устройства (TX) соединяется со
входом приемника другого устройства (RX)
49
50.
При этом обеспечивается полудуплексный режим связи, то есть, приемник ипередатчик могут работать одновременно
Недостаток этого интерфейса – низкая помехозащищенность.
Это происходит из-за того, что применяются несимметричные передатчики и
приемники, то есть сигнал в соединительный кабель и на прием, и на передачу
формируется относительно общего провода – земли. Любая наводка,
существующая даже в экранированном кабеле, может привести к сбою связи,
потере отдельных битов информации
Интерфейсы RS-422 и RS-485 используют симметричную передачу сигнала
Главное отличие RS-485 от RS-232 – все приемники и передатчики работают на
одну пару проводов, являющуюся линией связи.
Провод земли при этом не используется, а сигнал в линии формируется
дифференциальным методом. Он передается одновременно по двум проводам
(«А» и «В»)
Информативной является разность потенциалов между проводниками А и В.
дифференциальное выходное напряжение должно лежать в диапазоне 1,5-5 В.
50
51.
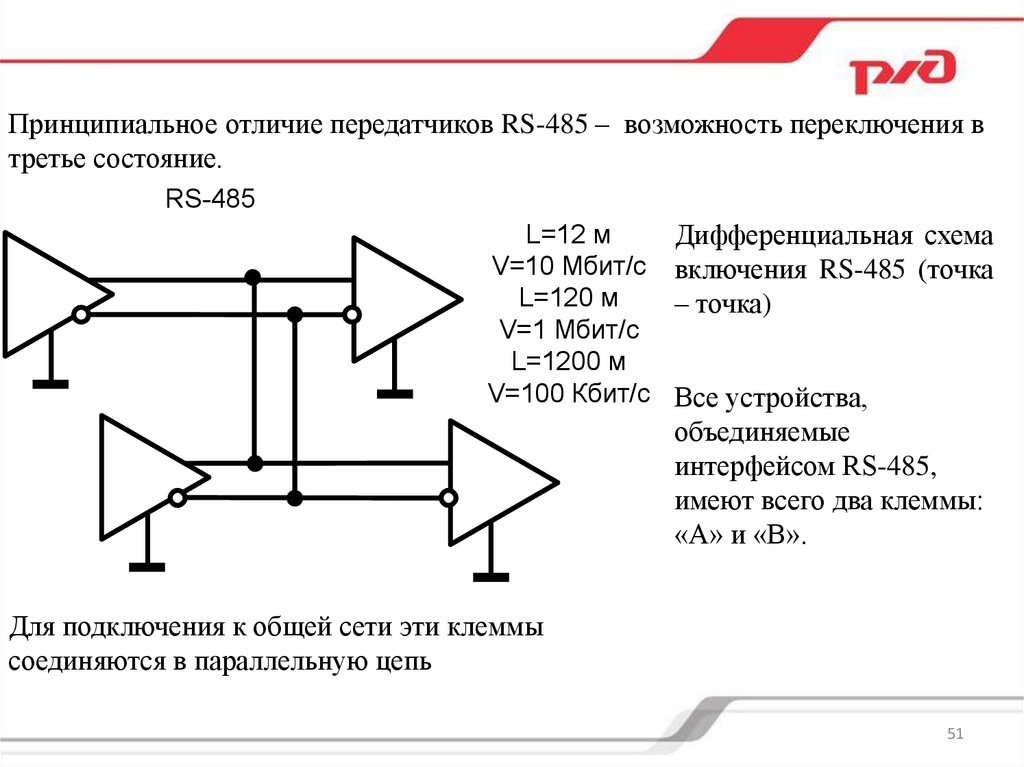
Принципиальное отличие передатчиков RS-485 – возможность переключения втретье состояние.
RS-485
L=12 м
V=10 Мбит/с
L=120 м
V=1 Мбит/с
L=1200 м
V=100 Кбит/с
Дифференциальная схема
включения RS-485 (точка
– точка)
Все устройства,
объединяемые
интерфейсом RS-485,
имеют всего два клеммы:
«А» и «В».
Для подключения к общей сети эти клеммы
соединяются в параллельную цепь
51
52.
Во многих случаях функционально-логических возможностей однокристальногоМК бывает недостаточно. Поэтому можно расширить микропроцессорную
систему относительно простыми средствами
МПС, построенные на МК51, допускают расширение памяти данных и программ
до 64 Кбайт
При обращении к ВПП микроконтроллер
МК51 формирует 16 - разрядный адрес,
младший байт которого выдается через
порт Р0, а старший - через порт Р2.
Причем порт Р0 используется в режиме
временного мультиплексирования: в
начале каждого машинного цикла
обращения к ВПП через порт Р0
выдается младший байт адреса,
который должен быть записан во
внешний регистр RG по
отрицательному фронту сигнала ALE
Низкий уровень сигнала PME,
разрешает выборку байта данных из
ПЗУ, который затем поступает на
линии порта Р0 и вводится в
микроконтроллер
52
53.
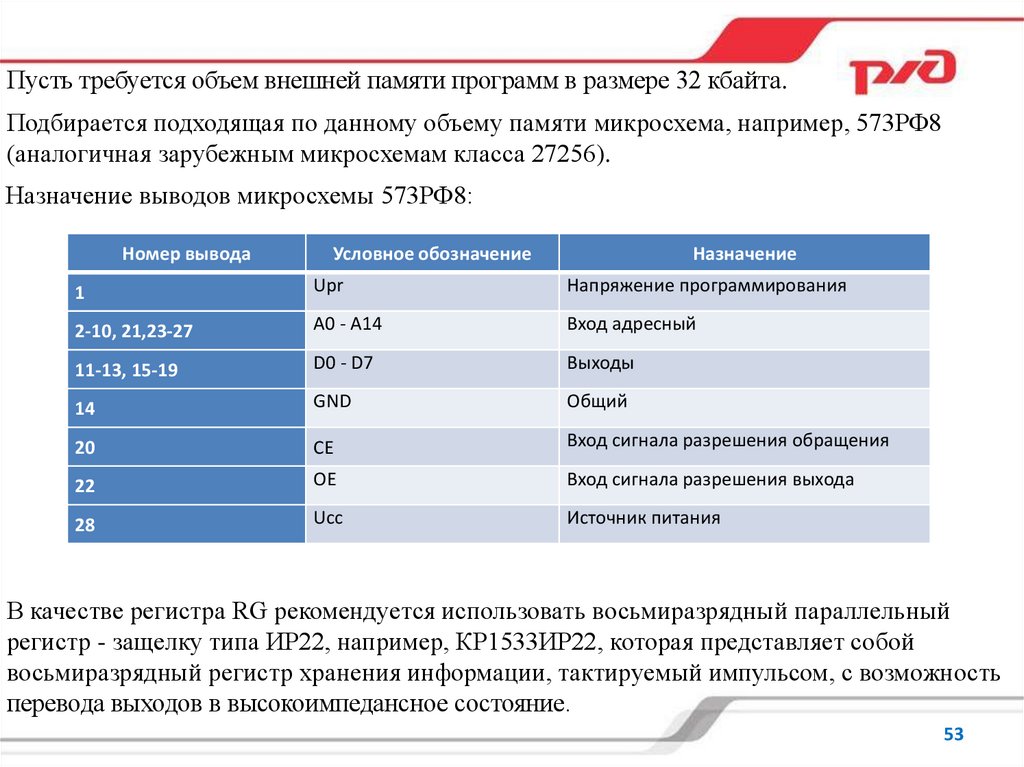
Пусть требуется объем внешней памяти программ в размере 32 кбайта.Подбирается подходящая по данному объему памяти микросхема, например, 573РФ8
(аналогичная зарубежным микросхемам класса 27256).
Назначение выводов микросхемы 573РФ8:
Номер вывода
Условное обозначение
Назначение
1
Upr
Напряжение программирования
2-10, 21,23-27
A0 - A14
Вход адресный
11-13, 15-19
D0 - D7
Выходы
14
GND
Общий
20
CE
Вход сигнала разрешения обращения
22
OE
Вход сигнала разрешения выхода
28
Ucc
Источник питания
В качестве регистра RG рекомендуется использовать восьмиразрядный параллельный
регистр - защелку типа ИР22, например, КР1533ИР22, которая представляет собой
восьмиразрядный регистр хранения информации, тактируемый импульсом, с возможность
перевода выходов в высокоимпедансное состояние.
53
54.
Высокоимпедансное состояние, высокоомное состояние, Z-состояние илисостояние «Выключено» — состояние вывода цифровой микросхемы, при
котором сопротивление между её внутренней схемой, подключённой к данному
выводу, и внешней схемой очень велико.
Высокоимпедансное логическое состояние — состояние выхода логического
устройства, при котором он обладает высоким сопротивлением (импедансом), то
есть фактически отключен от подсоединённого к нему проводника.
Введение в схему высокоимпедансного состояния позволяет подключать к одному
проводнику несколько логических выходов, при условии что они не создают
конфликтов состояния (одновременное наличие сигналов 0 и 1).
54
55.
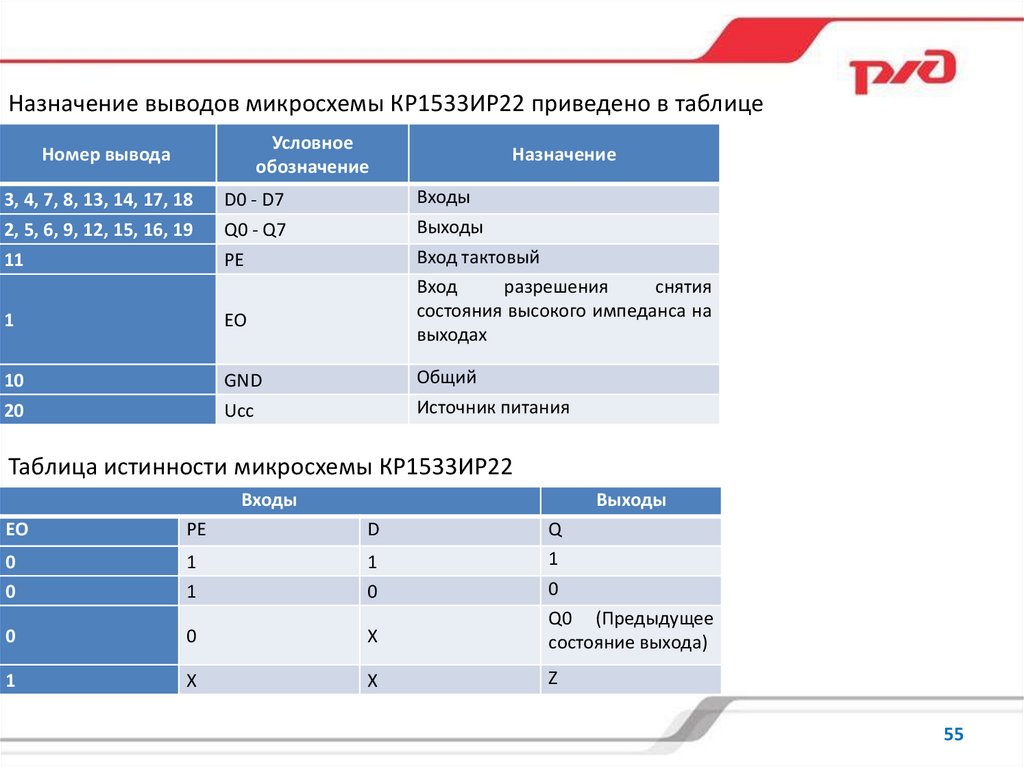
Назначение выводов микросхемы КР1533ИР22 приведено в таблицеУсловное
обозначение
Номер вывода
Назначение
3, 4, 7, 8, 13, 14, 17, 18
D0 - D7
Входы
2, 5, 6, 9, 12, 15, 16, 19
Q0 - Q7
11
PE
1
EO
Выходы
Вход тактовый
Вход
разрешения
снятия
состояния высокого импеданса на
выходах
10
GND
Общий
20
Ucc
Источник питания
Таблица истинности микросхемы КР1533ИР22
Входы
Выходы
EO
PE
D
0
0
1
1
1
0
0
0
X
Q
1
0
Q0 (Предыдущее
состояние выхода)
1
X
X
Z
55
56.
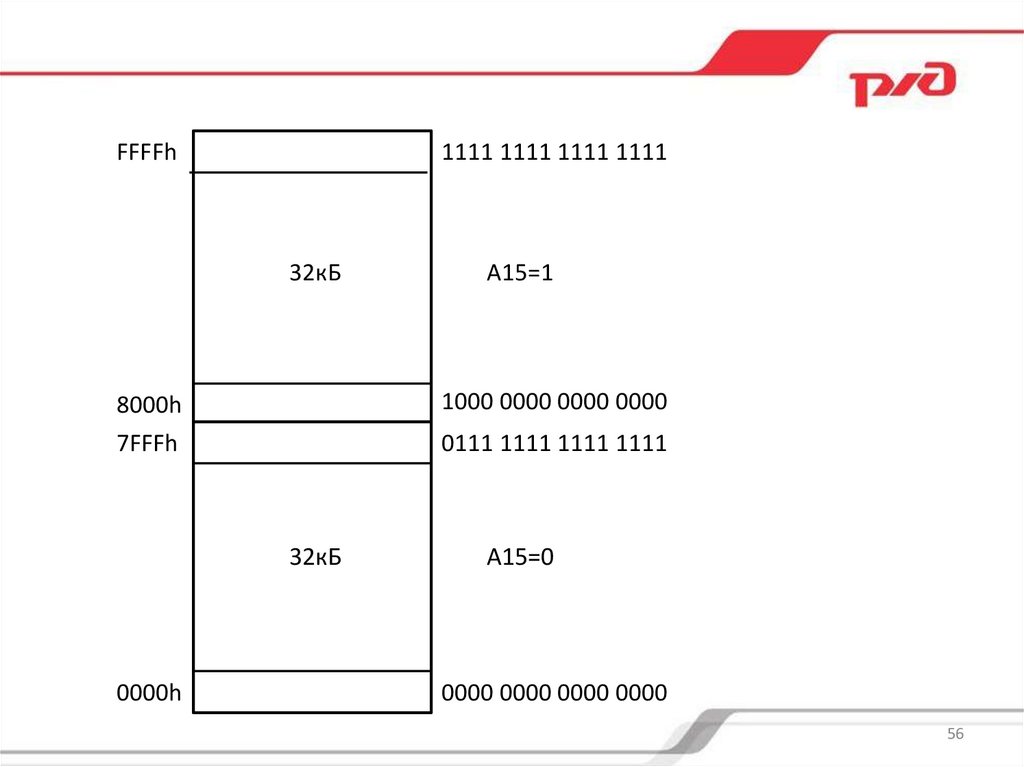
FFFFh1111 1111 1111 1111
32кБ
1000 0000 0000 0000
8000h
7FFFh
0111 1111 1111 1111
32кБ
0000h
A15=1
A15=0
0000 0000 0000 0000
56
57.
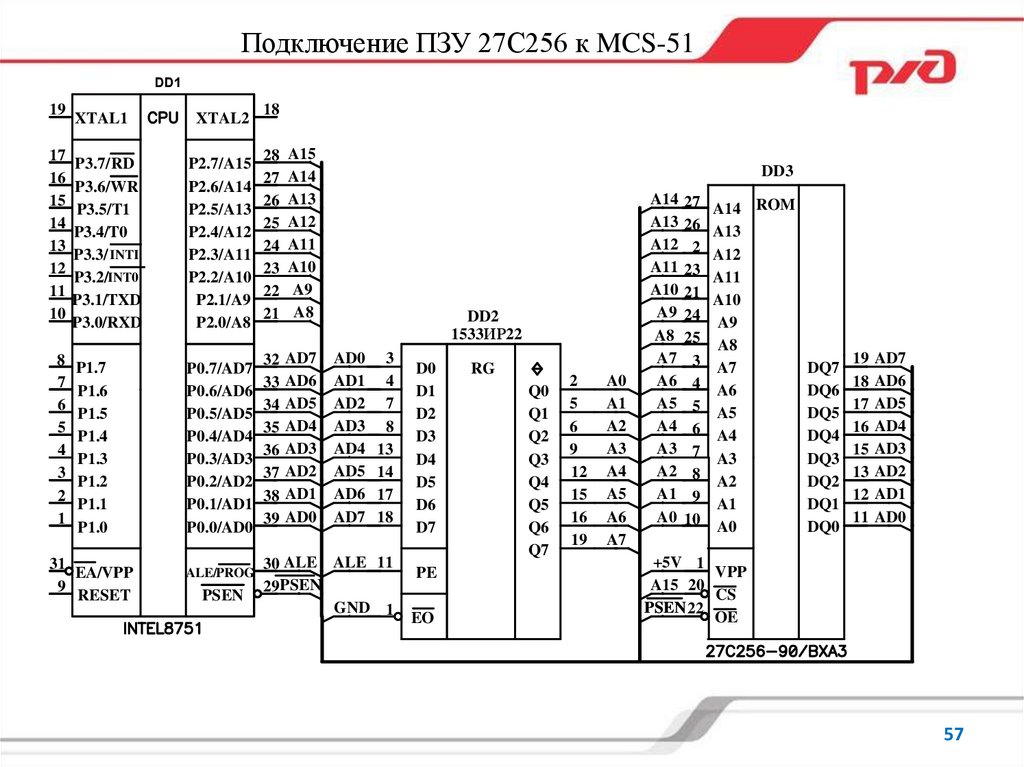
Подключение ПЗУ 27С256 к MCS-51DD1
19
17
16
15
14
13
12
11
10
8
7
6
5
4
3
2
1
XTAL1
XTAL2
P3.7/RD
P3.6/WR
P3.5/T1
P3.4/T0
P3.3/ INTI
P3.2/INT0
P3.1/TXD
P3.0/RXD
P2.7/A15
P2.6/A14
P2.5/A13
P2.4/A12
P2.3/A11
P2.2/A10
P2.1/A9
P2.0/A8
P1.7
P1.6
P1.5
P1.4
P1.3
P1.2
P1.1
P1.0
P0.7/AD7
P0.6/AD6
P0.5/AD5
P0.4/AD4
P0.3/AD3
P0.2/AD2
P0.1/AD1
P0.0/AD0
31
EA/VPP
9
RESET
ALE/PROG
PSEN
18
28
27
26
25
24
23
22
21
A15
A14
A13
A12
A11
A10
A9
A8
32
33
34
35
36
37
38
39
AD7
AD6
AD5
AD4
AD3
AD2
AD1
AD0
DD3
DD2
1533ИР22
AD0
AD1
AD2
AD3
AD4
AD5
AD6
AD7
3
4
7
8
13
14
17
18
30 ALE ALE 11
29PSEN
GND 1
D0
D1
D2
D3
D4
D5
D6
D7
PE
EO
RG
Q0
Q1
Q2
Q3
Q4
Q5
Q6
Q7
2
5
6
9
12
15
16
19
A0
A1
A2
A3
A4
A5
A6
A7
A14
A13
A12
A11
A10
A9
A8
A7
A6
A5
A4
A3
A2
A1
A0
27
26
2
23
21
24
25
3
4
5
6
7
8
9
10
A14 ROM
A13
A12
A11
A10
A9
A8
19 AD7
A7
DQ7
18 AD6
A6
DQ6
17 AD5
A5
DQ5
16 AD4
A4
DQ4
15 AD3
A3
DQ3
13 AD2
A2
DQ2
12 AD1
A1
DQ1
11 AD0
A0
DQ0
+5V 1
VPP
A15 20
CS
PSEN 22
OE
57
58.
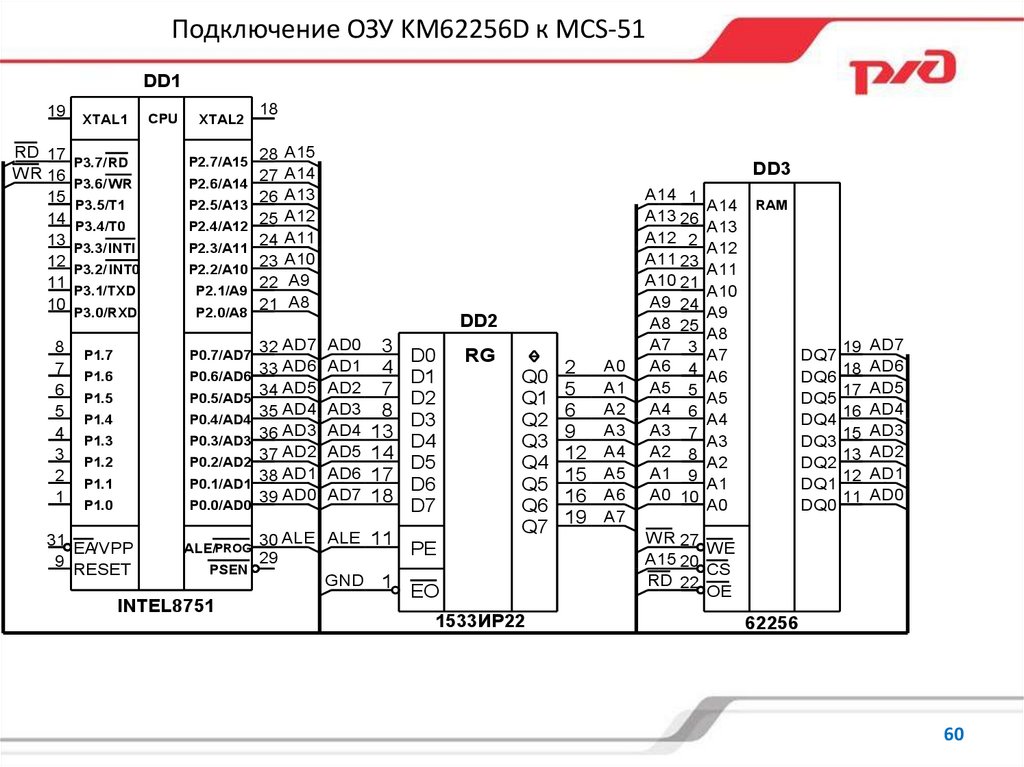
В некоторых МПС, рассчитанных на обработку больших массивов данных, РПДможет оказаться недостаточно. В этом случае возникает необходимость
использования внешнего оперативного запоминающего устройства (ОЗУ),
которое может быть подключено к микроконтроллеру МК51
При этом максимальный объем ОЗУ,
подключаемого к микроконтроллеру
МК51, может достигать 64 Кбайт.
Так же как и при работе с ВПП, байт
адреса, выдаваемый через порт Р0,
должен быть зафиксирован во внешнем
регистре по отрицательному фронту
сигнала ALE, т.к. в дальнейшем линии
порта Р0 используются для чтения или
записи информации в/из МК-51. При этом
чтение информации стробируется
сигналом RD, а запись - сигналом WR.
58
59.
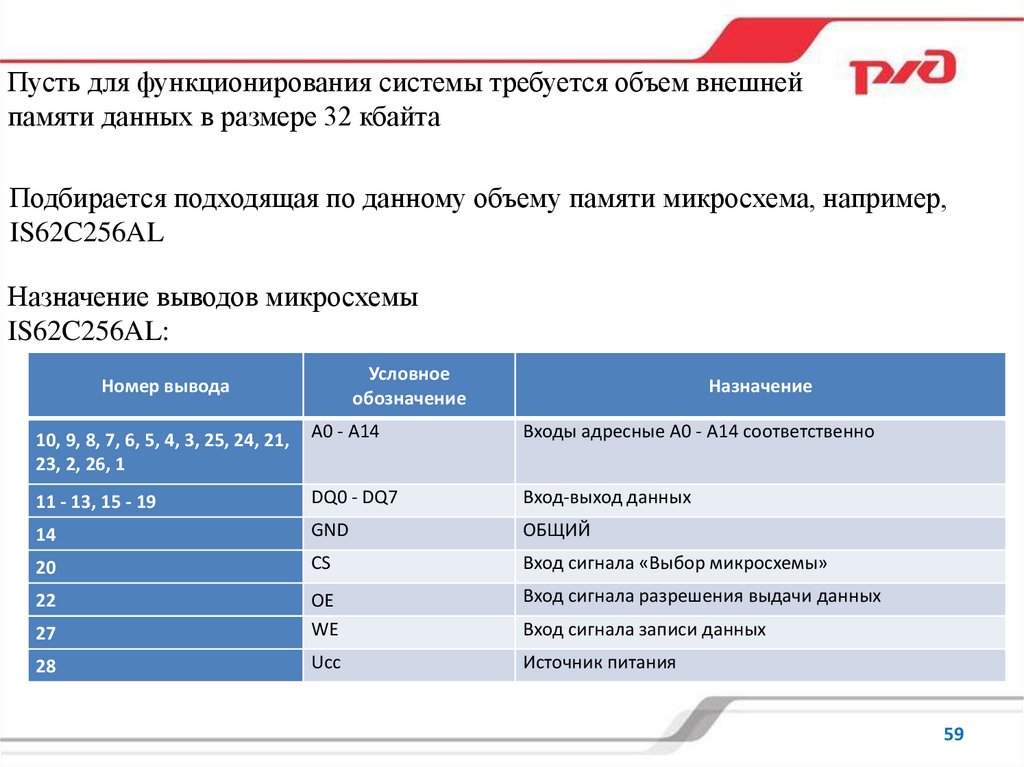
Пусть для функционирования системы требуется объем внешнейпамяти данных в размере 32 кбайта
Подбирается подходящая по данному объему памяти микросхема, например,
IS62C256AL
Назначение выводов микросхемы
IS62C256AL:
Условное
обозначение
Номер вывода
Назначение
10, 9, 8, 7, 6, 5, 4, 3, 25, 24, 21,
23, 2, 26, 1
А0 - А14
Входы адресные А0 - А14 соответственно
11 - 13, 15 - 19
DQ0 - DQ7
Вход-выход данных
14
GND
ОБЩИЙ
20
CS
Вход сигнала «Выбор микросхемы»
22
Вход сигнала разрешения выдачи данных
27
ОЕ
WE
28
Ucc
Источник питания
Вход сигнала записи данных
59
60.
Подключение ОЗУ KM62256D к MCS-51DD1
19 XTAL1
RD 17
WR 16
15
14
13
12
11
10
8
7
6
5
4
3
2
1
CPU
XTAL2
P3.7/RD
P2.7/A15
P3.6/ WR
P2.6/A14
P3.5/T1
P2.5/A13
P3.4/T0
P2.4/A12
P3.3/ INTI
P2.3/A11
P3.2/ INT0
P2.2/A10
P3.1/TXD
P2.1/A9
P3.0/RXD
P2.0/A8
P1.7
P0.7/AD7
P1.6
P0.6/AD6
P1.5
P0.5/AD5
P1.4
P0.4/AD4
P1.3
P0.3/AD3
P1.2
P0.2/AD2
P1.1
P0.1/AD1
P1.0
P0.0/AD0
31 EA/VPP
9 RESET
18
28
27
26
25
24
23
22
21
A15
A14
A13
A12
A11
A10
A9
A8
DD3
DD2
32 AD7
33 AD6
34 AD5
35 AD4
36 AD3
37 AD2
38 AD1
39 AD0
AD0
AD1
AD2
AD3
AD4
AD5
AD6
AD7
3
4
7
8
13
14
17
18
D0
D1
D2
D3
D4
D5
D6
D7
30 ALE ALE 11
PE
29
PSEN
GND 1
RG
Q0
Q1
Q2
Q3
Q4
Q5
Q6
Q7
ALE/PROG
INTEL8751
EO
1533ИР22
2
5
6
9
12
15
16
19
A0
A1
A2
A3
A4
A5
A6
A7
A14 1
A13 26
A12 2
A11 23
A10 21
A9 24
A8 25
A7 3
A6 4
A5 5
A4 6
A3 7
A2 8
A1 9
A0 10
A14
A13
A12
A11
A10
A9
A8
A7
A6
A5
A4
A3
A2
A1
A0
RAM
DQ7
DQ6
DQ5
DQ4
DQ3
DQ2
DQ1
DQ0
19
18
17
16
15
13
12
11
AD7
AD6
AD5
AD4
AD3
AD2
AD1
AD0
WR 27
WE
A15 20
CS
RD 22
OE
62256
60
61.
R210K
P3.1/TXD
R3
10K
R1
10K
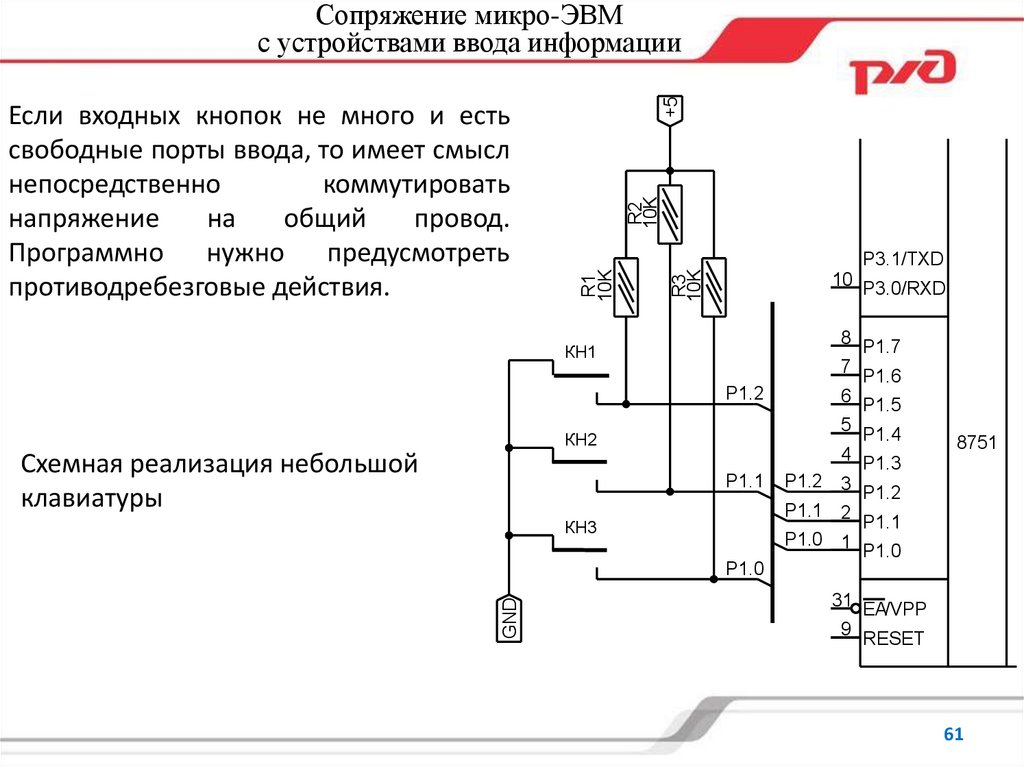
Если входных кнопок не много и есть
свободные порты ввода, то имеет смысл
непосредственно
коммутировать
напряжение
на
общий
провод.
Программно нужно предусмотреть
противодребезговые действия.
+5
Сопряжение микро-ЭВМ
с устройствами ввода информации
10 P3.0/RXD
8
КН1
P1.2
КН2
Схемная реализация небольшой
клавиатуры
P1.1
КН3
P1.7
7 P1.6
6
P1.5
5
P1.4
4 P1.3
8751
P1.2 3
P1.2
P1.1 2
P1.1
P1.0 1
P1.0
GND
P1.0
31 EA/VPP
9
RESET
61
62.
Устранение дребезга контактовПри работе МК с датчиками, имеющими механические или электромеханические
контакты (кнопки, клавиши, реле, клавиатуры), возникает явление, называемое
дребезгом. Это явление заключается в том, что при замыкании контактов
возможно появление отскока контактов, которое приводит к переходному
процессу.
При этом сигнал с контакта может быть воспринят МК как случайная
последовательность нулей и единиц.
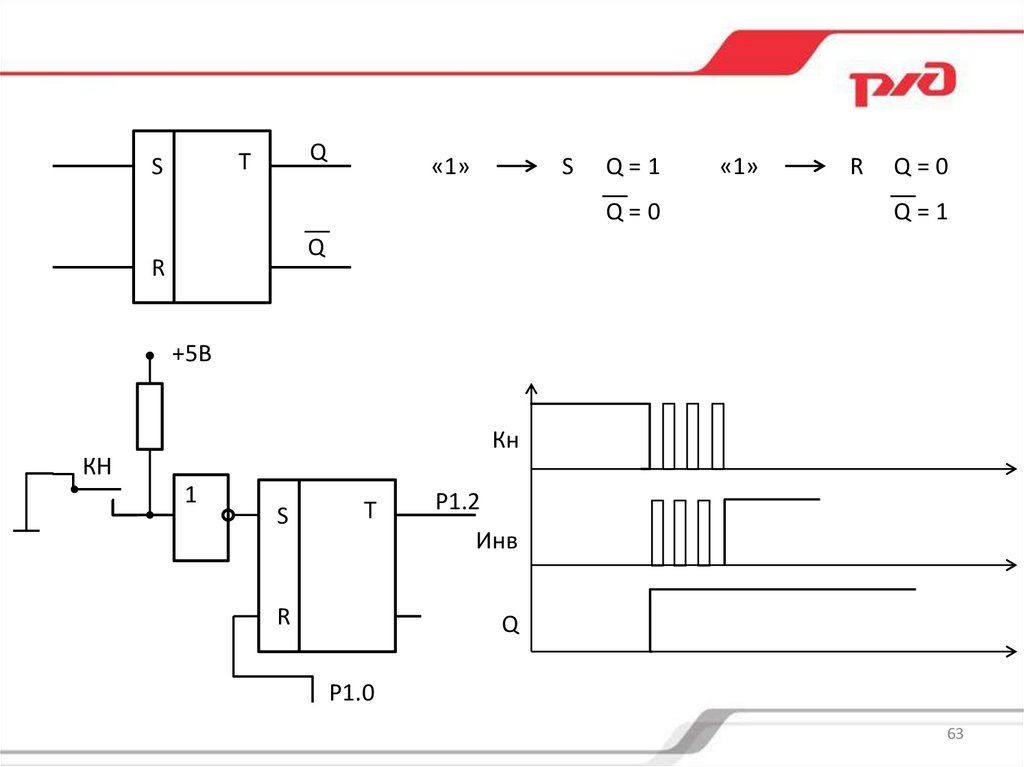
Подавить это нежелательное явление можно двумя способами:
1. Схемотехническим путем с использованием буферного триггера
2. Программными средствами:
2.1. Подсчет заданного числа совпадающих значений сигнала
2.2. Временная задержка
Суть первого способа состоит в многократном считывании сигнала с контакта.
Подсчет удачных опросов (т.е. опросов, обнаруживших, что контакт устойчиво
замкнут) ведется программным счетчиком. Если после серии удачных опросов
встречается неудачный, то подсчет начинается сначала. Контакт считается
устойчиво замкнутым (дребезг устранен), если последовало N удачных опросов.
62
63.
QТ
S
«1»
S
Q=1
Q=0
Т
«1»
R
Q=0
Q=1
Q
R
+5B
Кн
КН
1
1
Т
S
Р1.2
Инв
Т
R
Q
Р1.0
63
64.
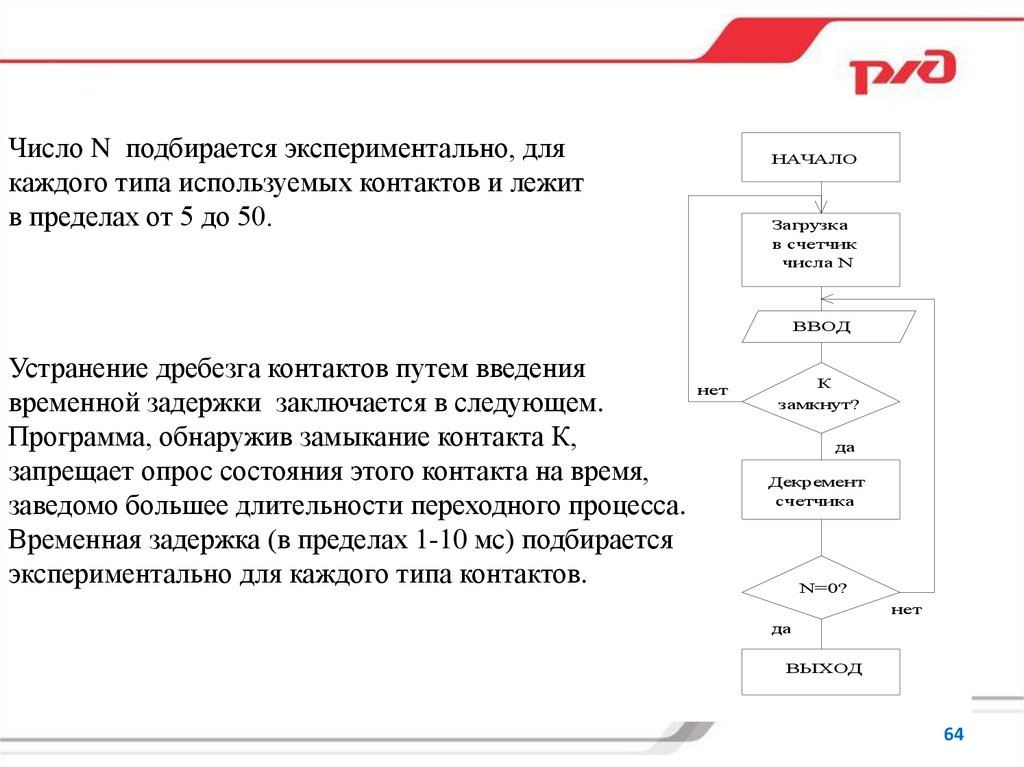
Число N подбирается экспериментально, длякаждого типа используемых контактов и лежит
в пределах от 5 до 50.
НАЧАЛО
Загрузка
в счетчик
числа N
ВВОД
Устранение дребезга контактов путем введения
временной задержки заключается в следующем.
Программа, обнаружив замыкание контакта К,
запрещает опрос состояния этого контакта на время,
заведомо большее длительности переходного процесса.
Временная задержка (в пределах 1-10 мс) подбирается
экспериментально для каждого типа контактов.
нет
К
замкнут?
да
Декремент
счетчика
N=0?
нет
да
ВЫХОД
64
65.
DD1+5
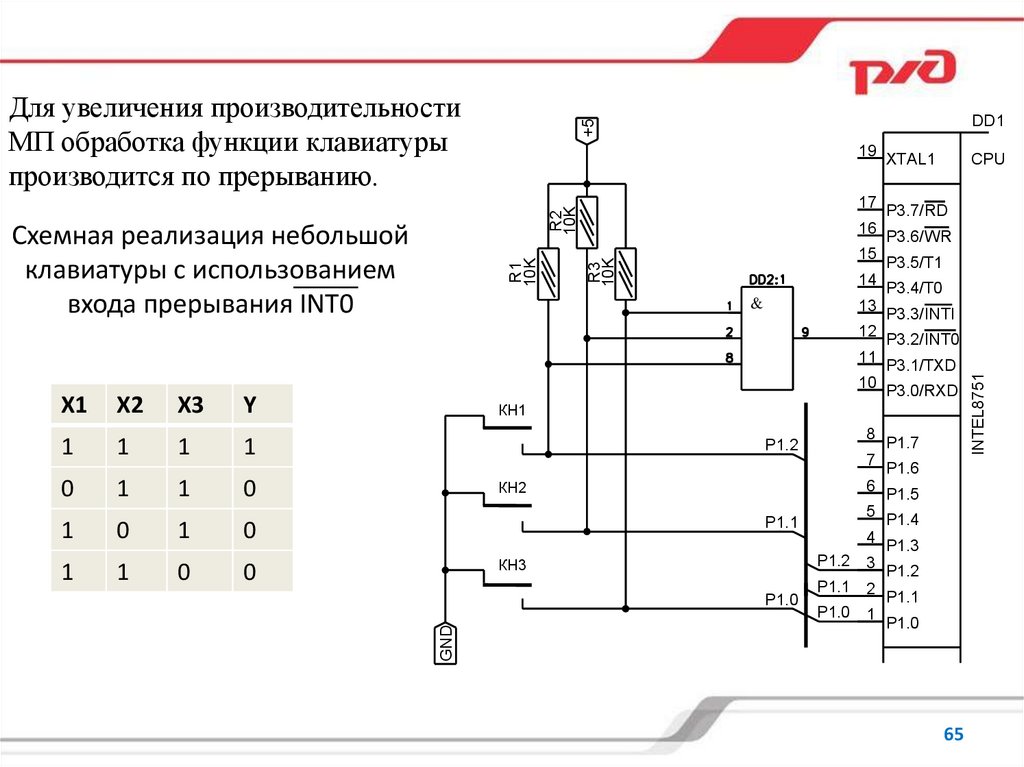
Для увеличения производительности
МП обработка функции клавиатуры
производится по прерыванию.
19
CPU
17 P3.7/RD
16 P3.6/WR
R2
10K
15
P3.5/T1
14 P3.4/T0
13 P3.3/INTI
R3
10K
R1
10K
Схемная реализация небольшой
клавиатуры с использованием
входа прерывания INT0
XTAL1
&
12
P3.2/INT0
X1
X2
X3
Y
1
1
1
1
0
1
1
0
1
0
1
0
1
0
КН1
8
P1.2
P1.7
7
P1.6
6 P1.5
5 P1.4
КН2
P1.1
4
P1.2
КН3
0
P1.0
GND
1
P3.1/TXD
10 P3.0/RXD
P1.1
P1.0
P1.3
3
P1.2
2 P1.1
1
P1.0
65
INTEL8751
11
66.
Расширение каналов ввода/вывода информацииЧисло линий ввода/вывода микроконтроллера МК-51 во многих
реальных применениях оказывается недостаточным.
Для расширения каналов ввода/вывода обычно используют такие стандартные
схемотехнические приемы как сканирование матрицы датчиков, опрос группы
канальных приемо-передатчиков с тремя состояниями на выходе,
мультиплексирование входных данных, стробируемый параллельный вывод
информации, использование быстродействующего последовательного канала
связи и т.д
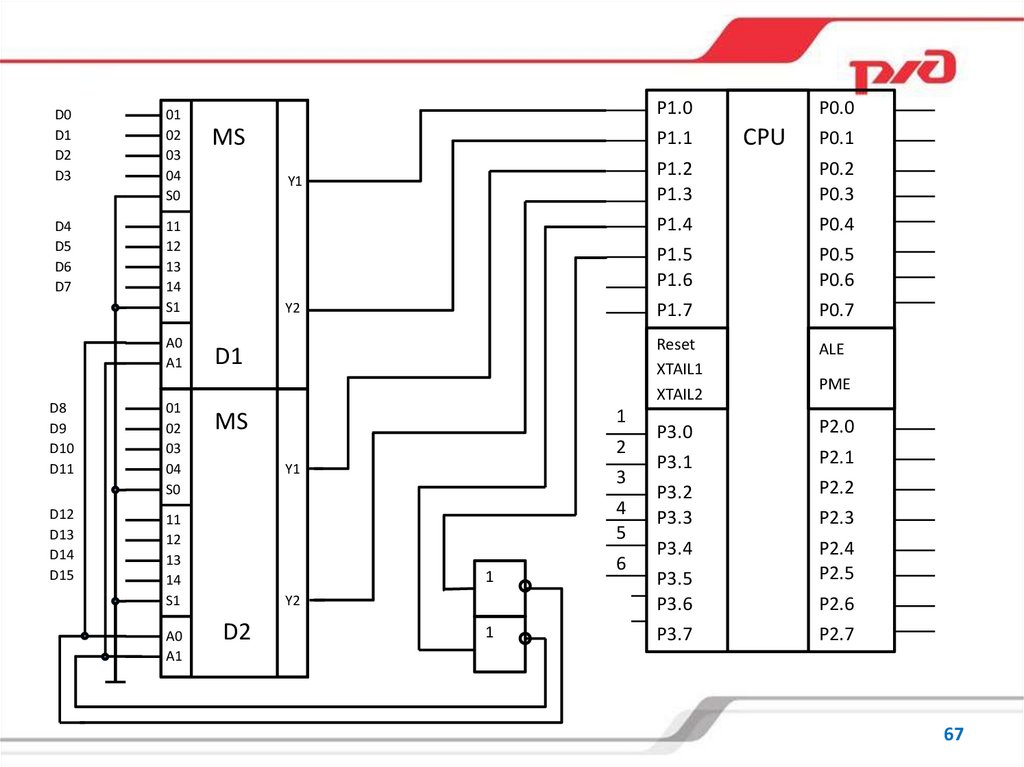
В качестве примера расширения числа линий ввода информации рассмотрим
фрагмент схемы, приведенной на рисунке
Микросхемы D1 и D2 представляют собой сдвоенные мультиплексоры типа 4 в 1
и могут передавать информацию от 16 двоичных датчиков на четыре линии порта
Р1 (Р1.0...Р1.3) микроконтроллера МК51.
Выводы Р1.4 и Р1.5 используются для выбора группы, состоящей из 4-х датчиков,
опрашиваемых в данный момент времени.
Так как нагрузочная способность выходных буферов портов ввода/вывода
невысока, то рекомендуется использовать буферные схемы
66
67.
D0D1
D2
D3
01
02
03
04
S0
D4
D5
D6
D7
11
12
13
14
S1
A0
A1
D8
D9
D10
D11
D12
D13
D14
D15
01
02
03
04
S0
Р1.0
MS
Y1
Y2
D1
1
MS
2
Y1
3
4
5
11
12
13
14
S1
A0
A1
Р1.1
1
Y2
D2
1
6
Р0.0
CPU
Р0.1
Р1.2
Р1.3
Р0.2
Р0.3
Р1.4
Р0.4
Р1.5
Р1.6
Р0.5
Р0.6
Р1.7
Р0.7
Reset
XTAIL1
XTAIL2
ALE
Р3.0
Р2.0
Р3.1
Р2.1
Р3.2
Р3.3
Р2.2
Р3.4
Р2.4
Р2.5
Р3.5
Р3.6
Р3.7
PME
Р2.3
Р2.6
Р2.7
67
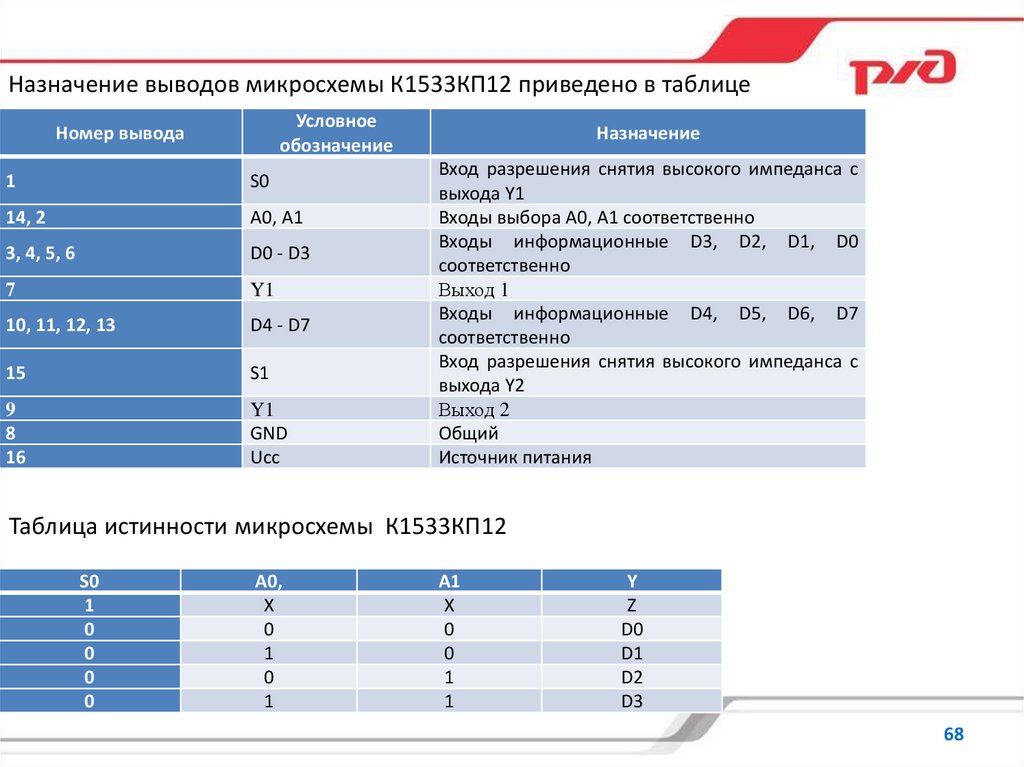
68.
Назначение выводов микросхемы К1533КП12 приведено в таблицеУсловное
обозначение
Номер вывода
1
S0
14, 2
А0, А1
3, 4, 5, 6
D0 - D3
7
Y1
10, 11, 12, 13
D4 - D7
15
S1
9
8
16
Y1
GND
Ucc
Назначение
Вход разрешения снятия высокого импеданса с
выхода Y1
Входы выбора А0, А1 соответственно
Входы информационные D3, D2, D1, D0
соответственно
Выход 1
Входы информационные D4, D5, D6, D7
соответственно
Вход разрешения снятия высокого импеданса с
выхода Y2
Выход 2
Общий
Источник питания
Таблица истинности микросхемы К1533КП12
S0
1
0
0
0
0
A0,
X
0
1
0
1
A1
X
0
0
1
1
Y
Z
D0
D1
D2
D3
68
69.
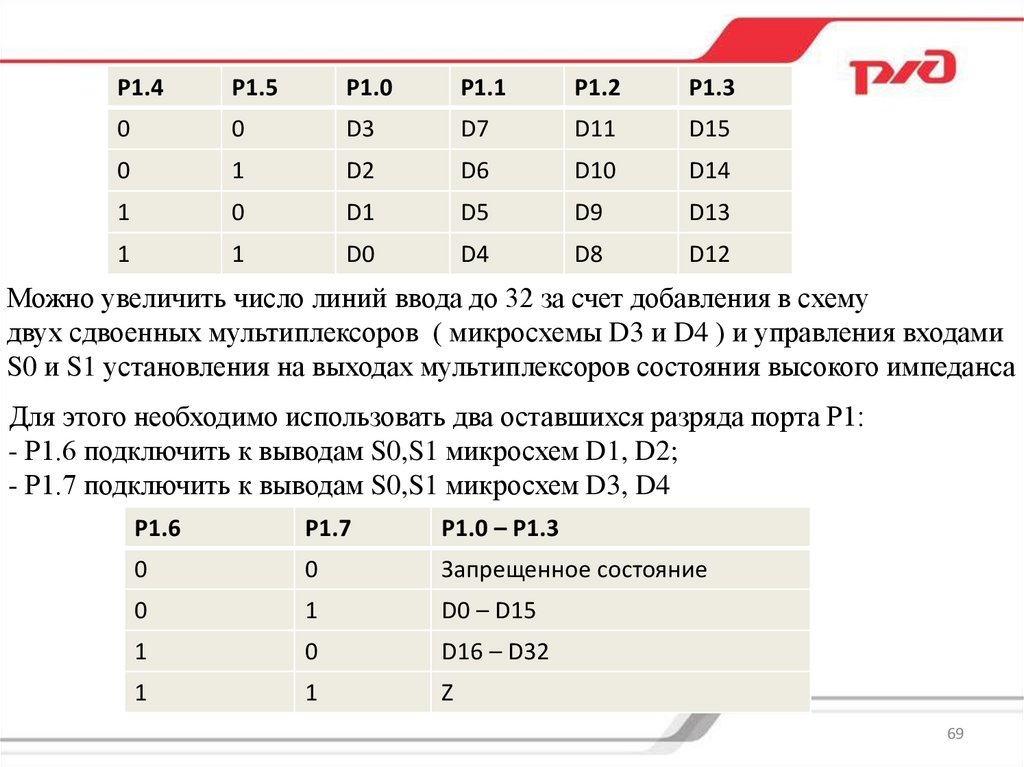
Р1.4Р1.5
Р1.0
Р1.1
Р1.2
Р1.3
0
0
D3
D7
D11
D15
0
1
D2
D6
D10
D14
1
0
D1
D5
D9
D13
1
1
D0
D4
D8
D12
Можно увеличить число линий ввода до 32 за счет добавления в схему
двух сдвоенных мультиплексоров ( микросхемы D3 и D4 ) и управления входами
S0 и S1 установления на выходах мультиплексоров состояния высокого импеданса
Для этого необходимо использовать два оставшихся разряда порта Р1:
- Р1.6 подключить к выводам S0,S1 микросхем D1, D2;
- Р1.7 подключить к выводам S0,S1 микросхем D3, D4
Р1.6
Р1.7
Р1.0 – Р1.3
0
0
Запрещенное состояние
0
1
D0 – D15
1
0
D16 – D32
1
1
Z
69
70.
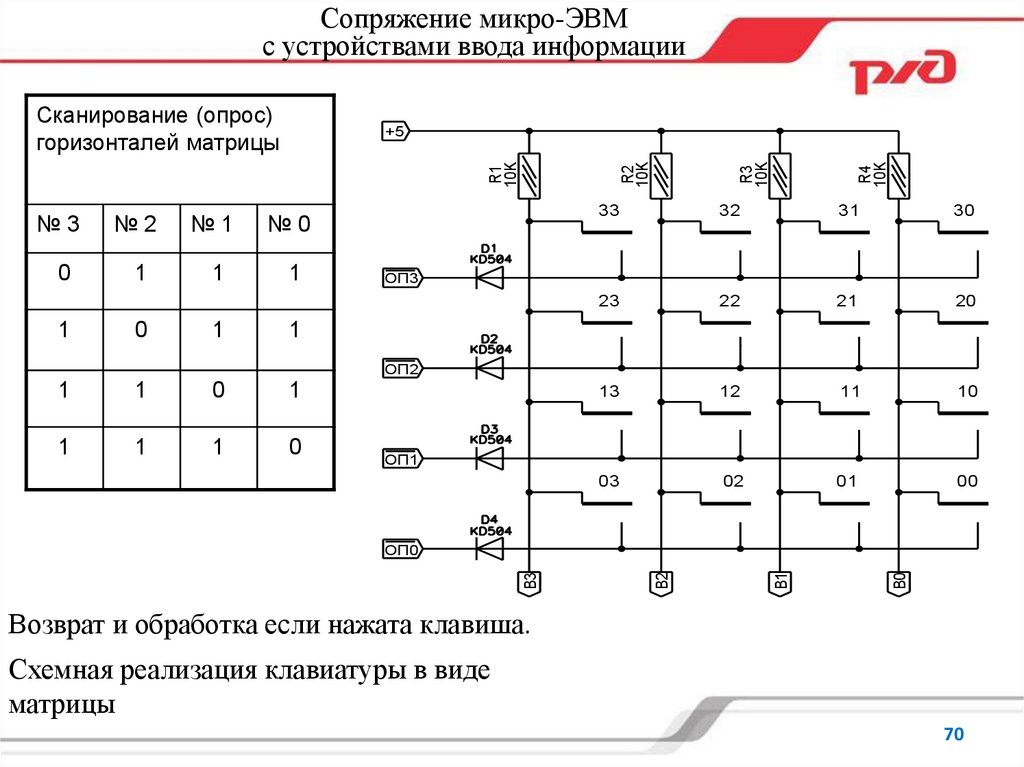
Сопряжение микро-ЭВМс устройствами ввода информации
Сканирование (опрос)
горизонталей матрицы
№3
№2
№1
№0
0
1
1
1
1
0
1
R4
10K
R3
10K
R2
10K
R1
10K
+5
33
32
31
30
23
22
21
20
13
12
11
10
03
02
01
00
OП3
1
OП2
1
1
0
1
1
1
1
0
OП1
B0
B1
B2
B3
ОП0
Возврат и обработка если нажата клавиша.
Схемная реализация клавиатуры в виде
матрицы
70
71.
Диоды предназначены для защитытокового ключа порта от замыкания на
другие линии опроса в случае
одновременного нажатия двух и более
клавиш
При появлении хотя бы одного нуля на шине возврата должна происходить
остановка сканирования шины опроса и определение кода нажатой клавиши.
Далее необходимо возобновить сканирование с целью определения момента
размыкания контакта клавиши и ожидания нового ввода кода. Моменты
коммутации должны сопровождаться противодребезговой задержкой.
71
72.
Расширение каналов вывода информации обычно достигается за счетиспользования нескольких регистров, стробируемых различными
синхросигналами, либо за счет использования последовательного канала связи.
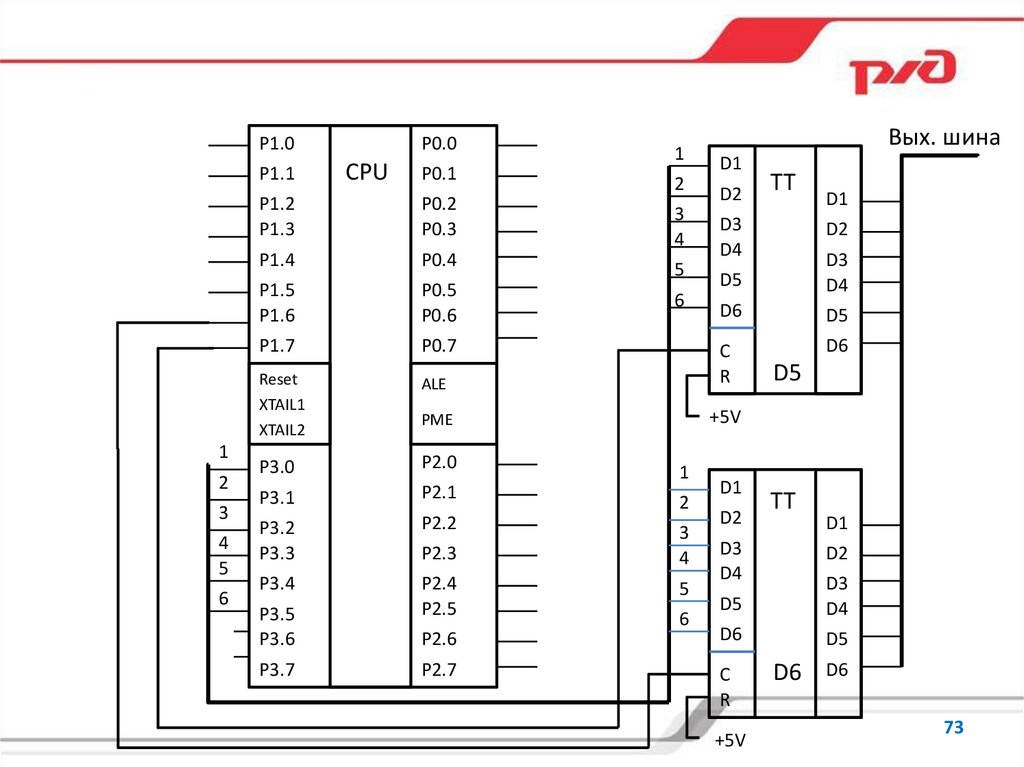
Шести разрядные данные устанавливаются на выходах параллельных регистров
D5, D6 последовательно во времени, по мере подачи на их тактовые входы
стробирующих импульсов, вырабатываемых на выходах Р1.6 и Р1.7
микроконтроллера.
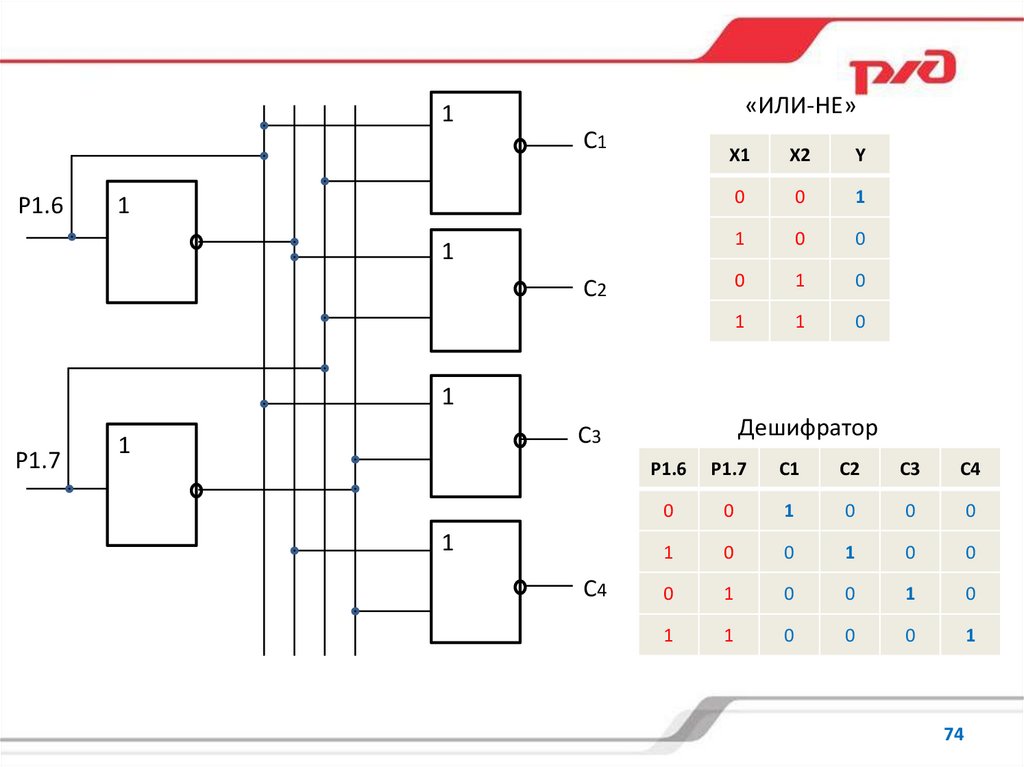
Разрядность выводимой информации в рассматриваемом примере легко может
быть увеличена до 24 бит, если стробирующие импульсы формировать с
помощью дешифратора 2 в 4. При этом адресные входы дешифратора следует
подключить к выводам Р1.6 и Р1.7, а его выходы – к тактовым входам
соответствующих параллельных регистров
72
73.
Р1.0Р1.1
1
2
3
4
5
6
Р0.0
CPU
Р0.1
1
2
Р1.2
Р1.3
Р0.2
Р0.3
Р1.4
Р0.4
Р1.5
Р1.6
Р0.5
Р0.6
Р1.7
Р0.7
Reset
XTAIL1
XTAIL2
Р3.0
Р2.0
Р3.1
Р2.1
Р3.2
Р3.3
Р2.2
Р2.3
3
4
Р3.4
Р2.4
Р2.5
5
Р3.5
Р3.6
Р3.7
3
4
Вых. шина
D1
D2
TT
D3
D4
D1
D2
D5
D3
D4
D6
D5
D6
ALE
C
R
PME
+5V
5
6
1
2
D1
D2
D5
TT
D3
D4
D1
D2
D5
D3
D4
Р2.6
D6
D5
Р2.7
C
R
6
+5V
D6
D6
73
74.
«ИЛИ-НЕ»1
С1
Р1.6
X1
X2
Y
0
0
1
1
0
0
0
1
0
1
1
0
1
1
С2
1
Р1.7
Дешифратор
С3
1
1
С4
Р1.6
Р1.7
С1
С2
С3
С4
0
0
1
0
0
0
1
0
0
1
0
0
0
1
0
0
1
0
1
1
0
0
0
1
74
75.
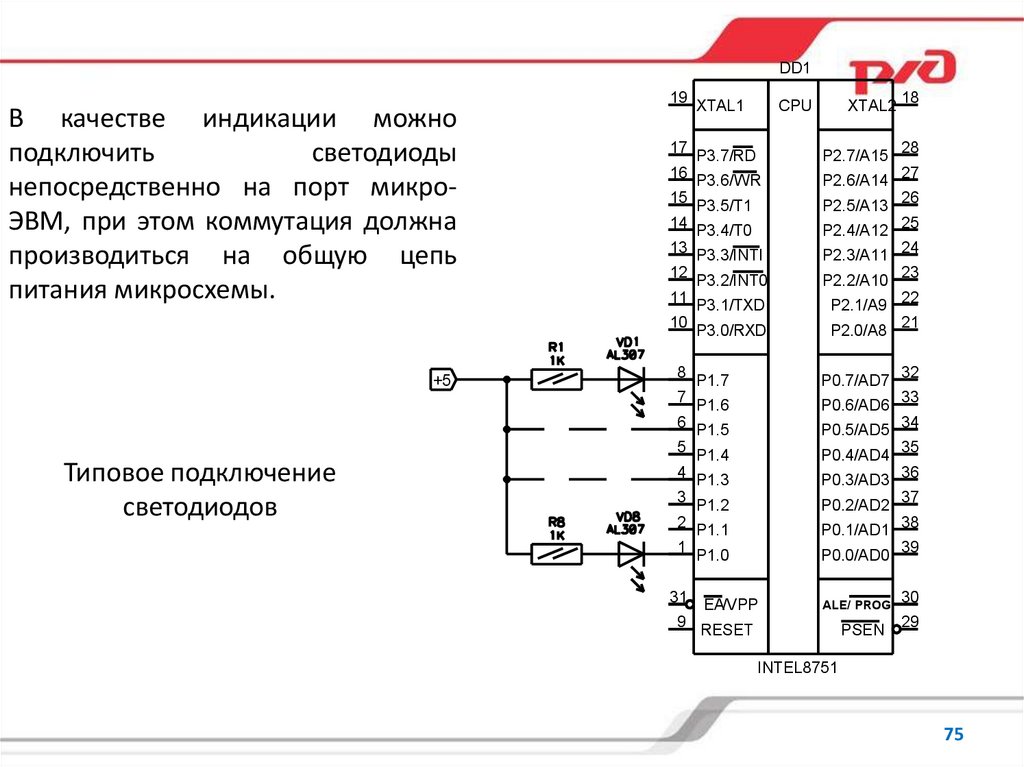
DD1В качестве индикации можно
подключить
светодиоды
непосредственно на порт микроЭВМ, при этом коммутация должна
производиться на общую цепь
питания микросхемы.
+5
Типовое подключение
светодиодов
19 XTAL1
XTAL2 18
CPU
17 P3.7/RD
16 P3.6/WR
P2.7/A15 28
P2.6/A14 27
15 P3.5/T1
14 P3.4/T0
P2.5/A13 26
P2.4/A12 25
13 P3.3/INTI
12 P3.2/INT0
P2.3/A11 24
P2.2/A10 23
11 P3.1/TXD
10 P3.0/RXD
P2.1/A9 22
P2.0/A8 21
8
P1.7
P0.7/AD7
32
7 P1.6
6 P1.5
P0.6/AD6 33
P0.5/AD5 34
5 P1.4
4 P1.3
P0.4/AD4 35
P0.3/AD3 36
3 P1.2
2 P1.1
P0.2/AD2 37
P0.1/AD1 38
1
31
P1.0
P0.0/AD0
EA/VPP
ALE/ PROG
9 RESET
PSEN
39
30
29
INTEL8751
75
76.
Лампа накаливанияБ
СПБ
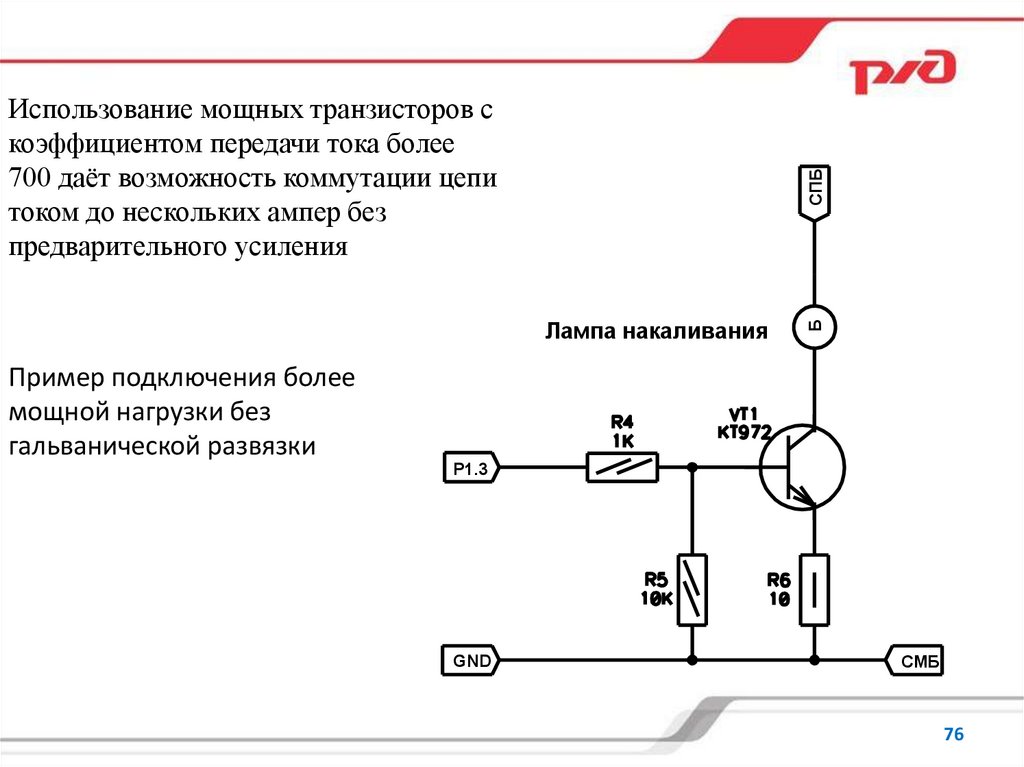
Использование мощных транзисторов с
коэффициентом передачи тока более
700 даёт возможность коммутации цепи
током до нескольких ампер без
предварительного усиления
Пример подключения более
мощной нагрузки без
гальванической развязки
P1.3
GND
СМБ
76
77.
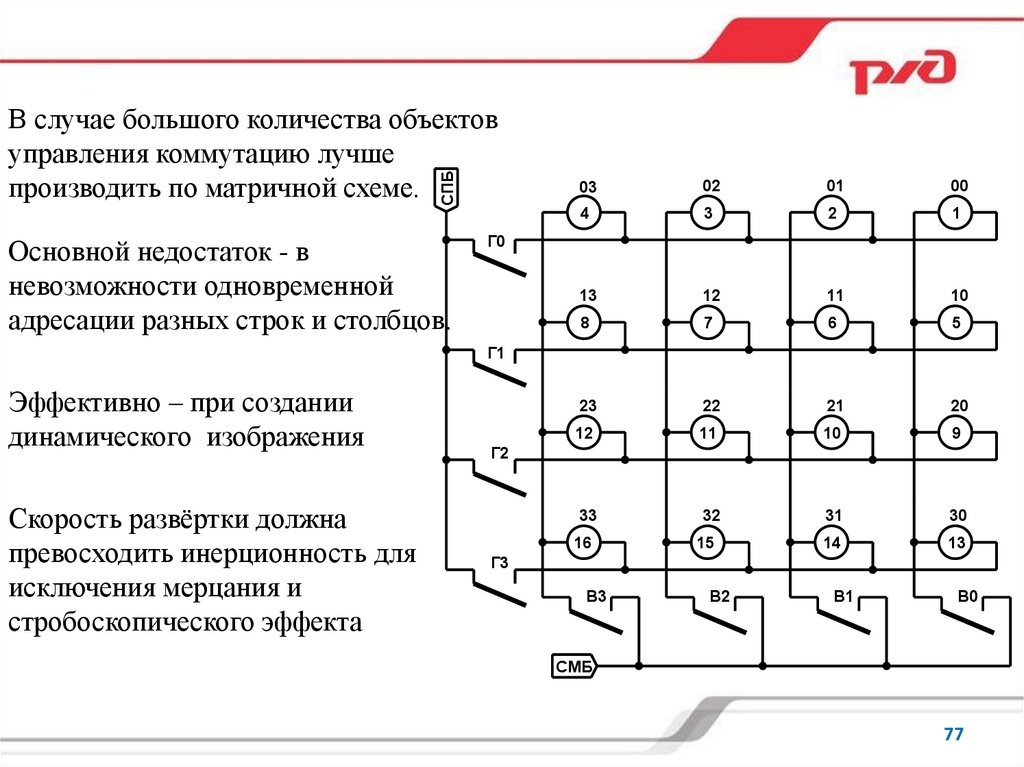
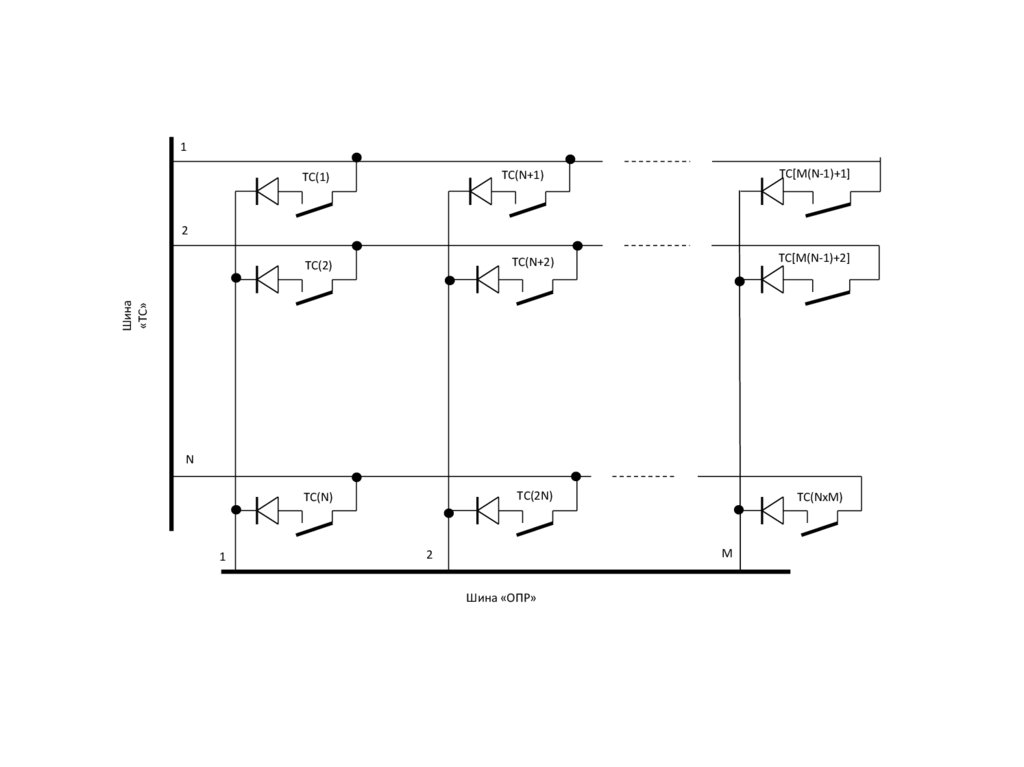
CПБВ случае большого количества объектов
управления коммутацию лучше
производить по матричной схеме.
Основной недостаток - в
невозможности одновременной
адресации разных строк и столбцов.
03
02
01
00
4
3
2
1
13
12
11
10
8
7
6
5
23
22
21
20
12
11
10
9
33
32
31
30
14
13
Г0
Г1
Эффективно – при создании
динамического изображения
Скорость развёртки должна
превосходить инерционность для
исключения мерцания и
стробоскопического эффекта
Г2
16
15
Г3
В3
В2
В1
В0
СМБ
77
78.
10
2
МикроЭВМ
7
3
6
4
5
Каждое устройство в системе имеет свой уникальный адрес
78
79.
1514
13
12
1 DC
Дешифратор адреса
микропроцессорной
информационно 1
1
управляющей
системы
1
23
2
4
8
К155ИД10
0
1
2
3
4
5
6
7
8
9
2
3
4
5
6
7
8
9
10
DC
1
22
21
20
18
19
2
4
8
C1
C2
0
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
К155ИД3
2
3
4
5
6
7
8
9
10
11
13
14
15
16
17
C1
D1
DC
2
D2
D1
D3
3
D4
A1
13 A2
B1
B2
15
B3
14 C2
B4
D2
7
6
5
4
9
10
11
12
К155ИД4
В соответствии с сигналами на
адресных входах появляется
сигнал низкого уровня на одном из
выходов дешифратора
Как правило – наличие входов управления, разрешающих/запрещающих
дешифрацию
При запрете дешифрации – на всех выходах сигнал высокого уровня
79
80.
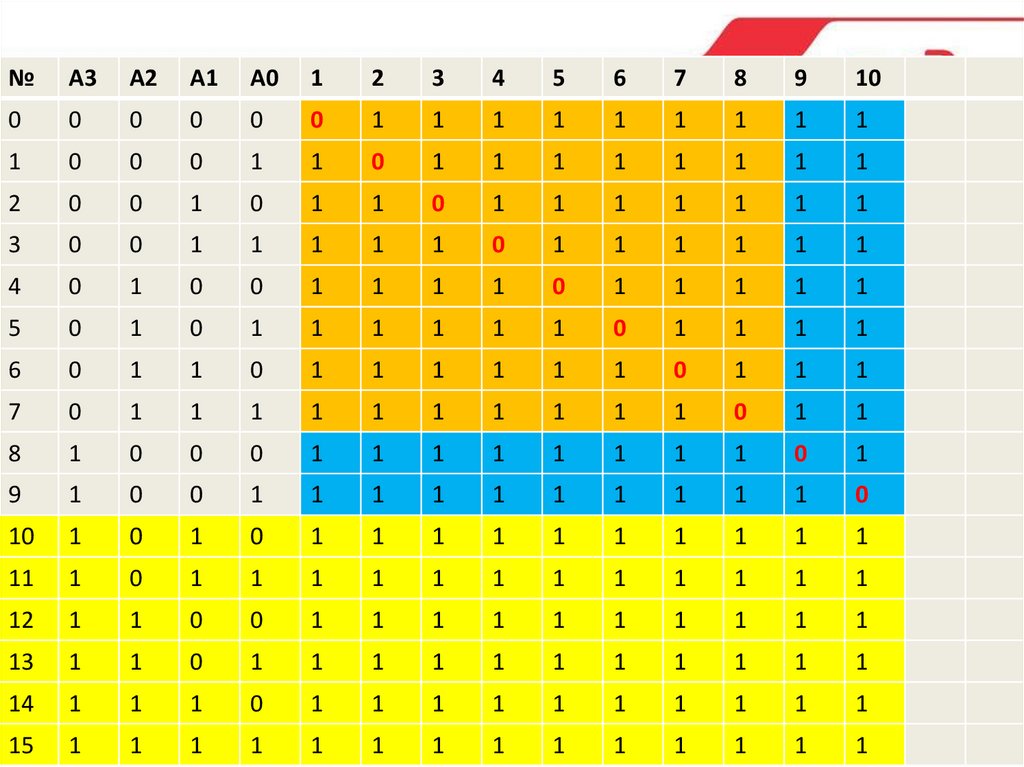
ИД10Преобразует четырехразрядный двоичный код, поступающий на входы А0 - А3 в
сигнал низкого уровня, появляющийся на одном из выходов 0 - 9 .
Если десятичный эквивалент входного кода превышает 9, то на всех выходах
0 -9 появятся напряжения высоких уровней (1010, 1011, 1100, 1101, 1110, 1111)
Может применяться для дешифрации трехзначного двоичного кода, поступающего
на входы А0 – А2.
Вход А3 можно использовать как разрешающий с низким активным уровнем.
80
81.
№А3
А2
А1
А0
1
2
3
4
5
6
7
8
9
10
0
0
0
0
0
0
1
1
1
1
1
1
1
1
1
1
0
0
0
1
1
0
1
1
1
1
1
1
1
1
2
0
0
1
0
1
1
0
1
1
1
1
1
1
1
3
0
0
1
1
1
1
1
0
1
1
1
1
1
1
4
0
1
0
0
1
1
1
1
0
1
1
1
1
1
5
0
1
0
1
1
1
1
1
1
0
1
1
1
1
6
0
1
1
0
1
1
1
1
1
1
0
1
1
1
7
0
1
1
1
1
1
1
1
1
1
1
0
1
1
8
1
0
0
0
1
1
1
1
1
1
1
1
0
1
9
1
0
0
1
1
1
1
1
1
1
1
1
1
0
10
1
0
1
0
1
1
1
1
1
1
1
1
1
1
11
1
0
1
1
1
1
1
1
1
1
1
1
1
1
12
1
1
0
0
1
1
1
1
1
1
1
1
1
1
13
1
1
0
1
1
1
1
1
1
1
1
1
1
1
14
1
1
1
0
1
1
1
1
1
1
1
1
1
1
15
1
1
1
1
1
1
1
1
1
1
1
1
1
1
81
82.
ВходыАдрес
Выходы
Разрешение
А1
А2
D1
C1
D1
D2
D3
D4
X
X
1
X
1
1
1
1
0
0
0
1
0
1
1
1
1
0
0
1
1
0
1
1
0
1
0
1
1
1
0
1
1
1
0
1
1
1
1
0
X
X
X
0
1
1
1
1
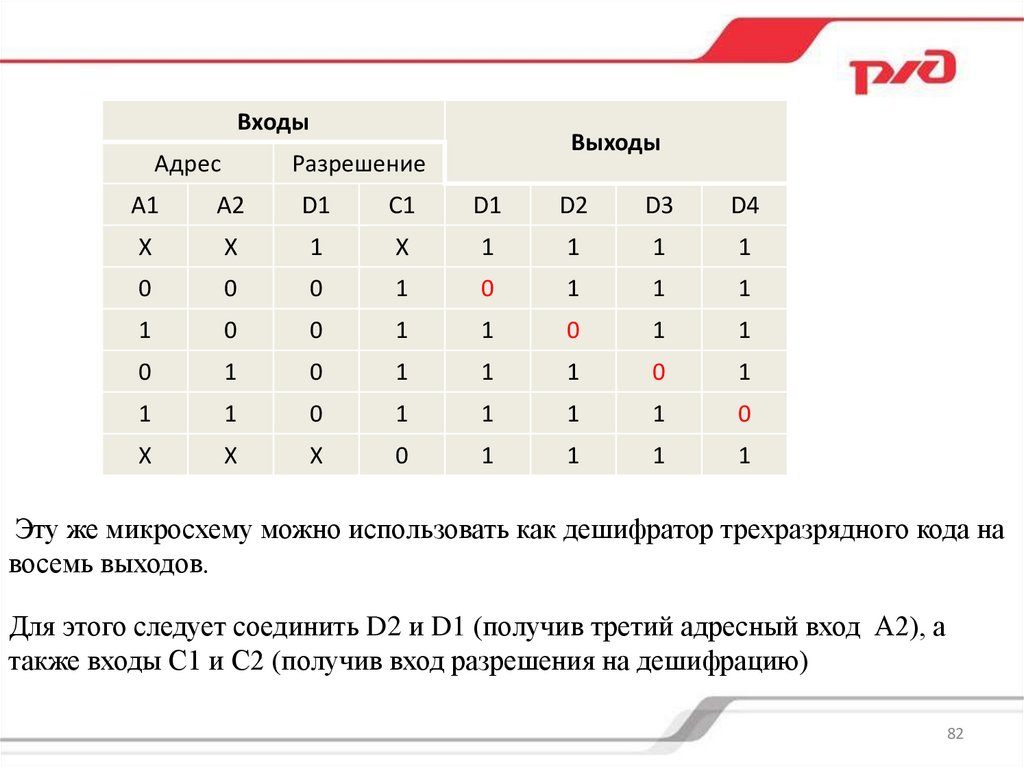
Эту же микросхему можно использовать как дешифратор трехразрядного кода на
восемь выходов.
Для этого следует соединить D2 и D1 (получив третий адресный вход А2), а
также входы С1 и С2 (получив вход разрешения на дешифрацию)
82
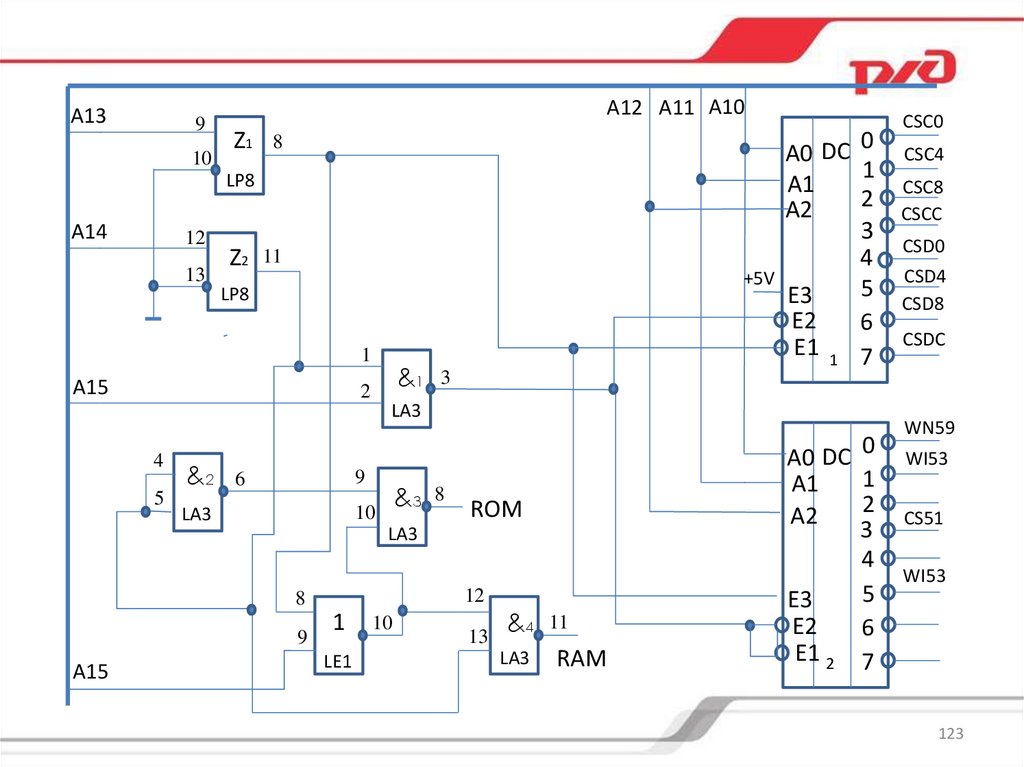
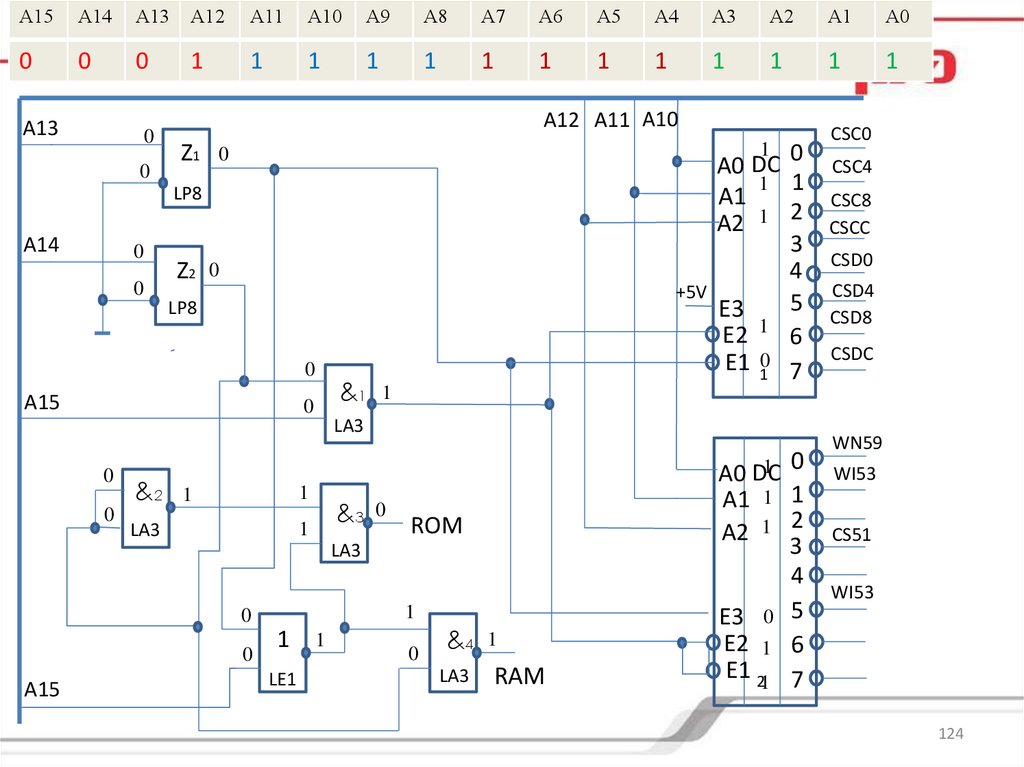
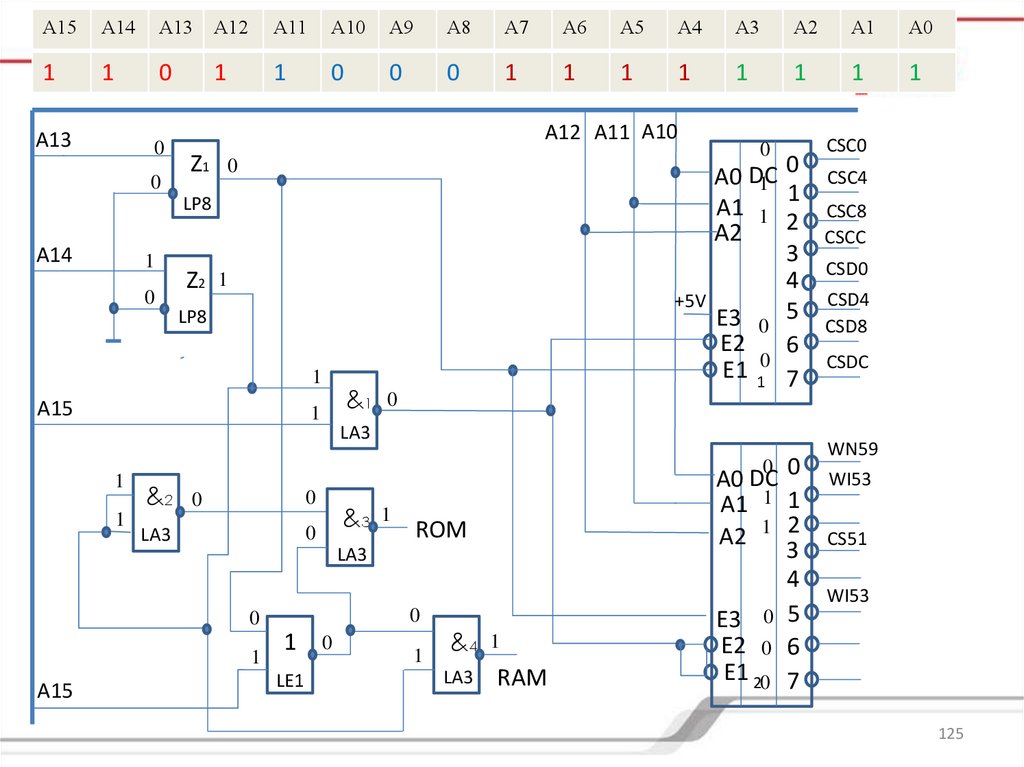
83.
Дешифратор адресамикропроцессорной
информационно управляющей системы
ША
RD/WR
DC1 Q0
Q1
A
Q2
Q3
Q4
CS
Q5
DC2 Q0
Q1
A
Q2
Q3
RDIO/WRIO
Q4
CS
Q5
CS0
CS1
CS2
CS3
CS4
CS5
CS6
CS7
CS8
CS9
CS10
CS11
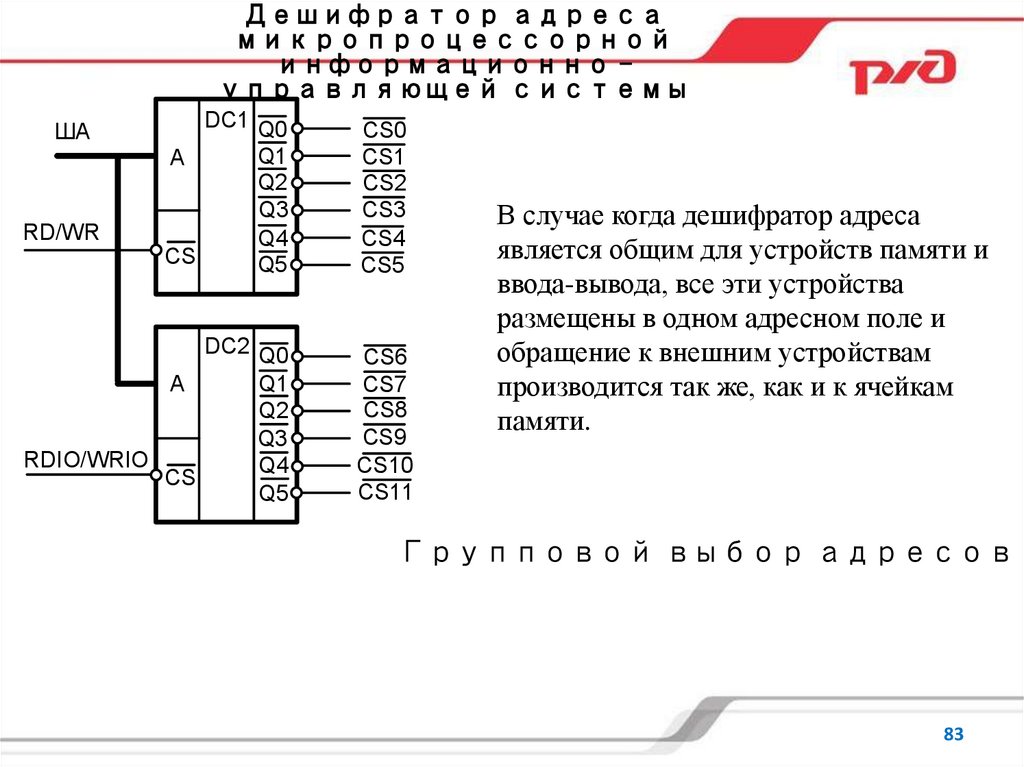
В случае когда дешифратор адреса
является общим для устройств памяти и
ввода-вывода, все эти устройства
размещены в одном адресном поле и
обращение к внешним устройствам
производится так же, как и к ячейкам
памяти.
Групповой выбор адресов
83
84.
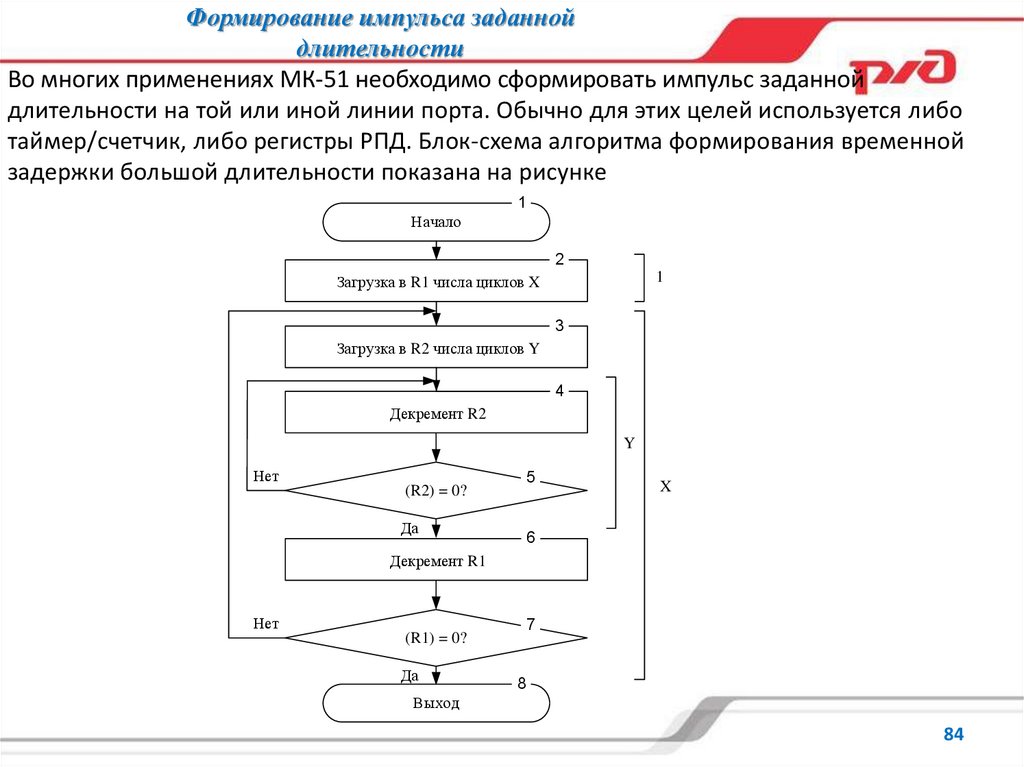
Формирование импульса заданнойдлительности
Во многих применениях МК-51 необходимо сформировать импульс заданной
длительности на той или иной линии порта. Обычно для этих целей используется либо
таймер/счетчик, либо регистры РПД. Блок-схема алгоритма формирования временной
задержки большой длительности показана на рисунке
1
Начало
2
1
Загрузка в R1 числа циклов X
3
Загрузка в R2 числа циклов Y
4
Декремент R2
Y
Нет
5
(R2) = 0?
Да
X
6
Декремент R1
Нет
7
(R1) = 0?
Да
8
Выход
84
85.
Данный алгоритм для формирования временной задержки использует так называемыевложенные циклы.
На начальном этапе в регистр R1 загружается число “большого” цикла X (блок 2), а в
регистр R2 – число “малого” цикла Y (блок 3).
Эти две команды выполняются за один машинный цикл.
С помощью блоков 4, 5 подпрограммы содержимое регистра R2 уменьшается до 0 и
осуществляется переход к блоку 6 подпрограммы.
Этот цикл удобнее организовать с помощью команды условного перехода, которая
выполняется МК-51 за 2 машинных цикла.
Аналогично организуется и “большой” цикл (блоки 6, 7).
Таким образом, длительность временной задержки, формируемой с помощью этого
алгоритма, в машинных циклах можно рассчитать по формуле:
t ЗЦ 1 (1 2 Y 2) X
85
86.
Время задержки в секундах рассчитывается по формуле:tЗ
1
f BQ
12 1 (3 2 Y ) X
Если задана длительность импульса, формируемого с помощью рассмотренного
алгоритма, то необходимо подобрать такие X и Y, чтобы выполнялось условие:
t З t ЗАД
Для того чтобы МК-51 сформировал импульс с точностью плюс/минус 1
машинный цикл в подпрограмму необходимо добавить команду “нет операции”,
число которых можно рассчитать по формуле:
N
t ЗАД t З
12
f BQ
Если число команд «нет операции», необходимых для “подгонки” задержки,
получится больше 5, то рекомендуется для этих целей использовать локальный
цикл, который вставляется в тело подпрограммы после блока 7.
86
87.
АЦП МПИУСИз
всего
многообразия
существующих
методов
аналого-цифрового
преобразования в интегральной технологии нашли применение в основном три:
1) метод прямого (параллельного) преобразования;
2) метод последовательного приближения (поразрядного уравновешивания);
3) метод интегрирования.
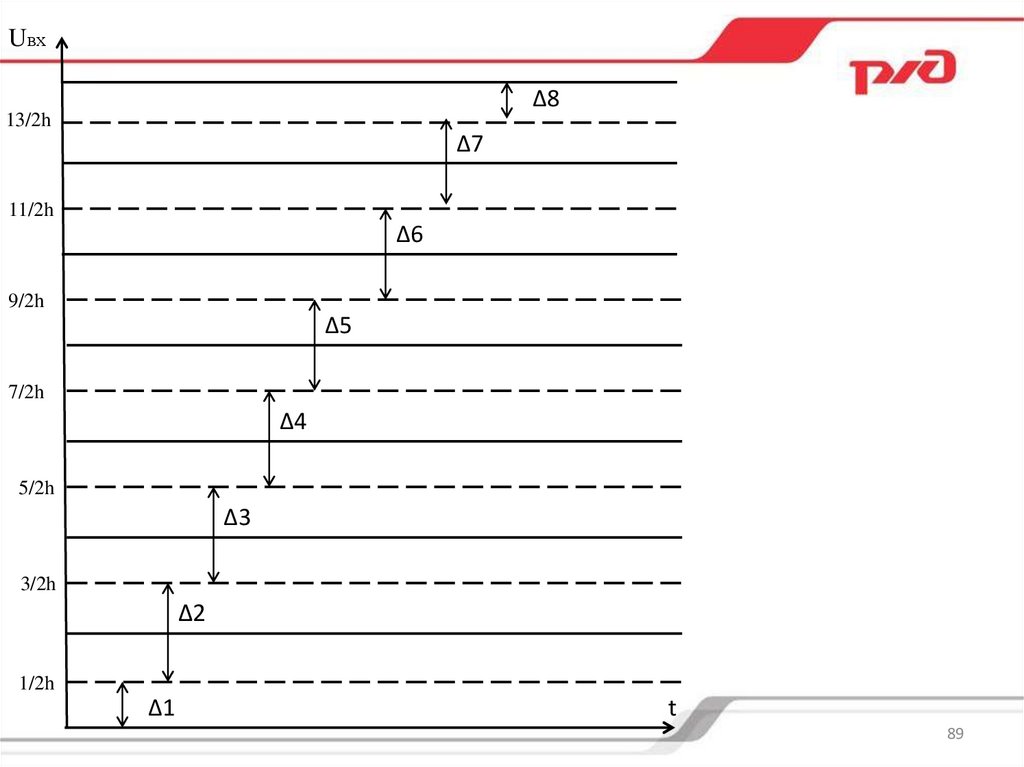
В АЦП с параллельным преобразованием входной сигнал прикладывается
одновременно ко входам всех компараторов. В каждом компараторе он
сравнивается с опорным сигналом, значение которого эквивалентно определенной
кодовой комбинации. Опорный сигнал снимается с узлов резистивного делителя,
питаемого от источника опорного напряжения. Число возможных кодовых
комбинаций (а следовательно, число компараторов) равно 2m - 1, где т — число
разрядов АЦП. АЦП прямого преобразования обладают самым высоким
быстродействием среди других типов АЦП, определяемым быстродействием
компараторов и задержками в логическом дешифраторе
87
88.
Недостатком их являетсянеобходимость в большом количестве
компараторов. Так, для 8-разрядного
АЦП требуется 255 компараторов. Это
затрудняет реализацию многоразрядных
(свыше 6-8 разрядов) АЦП в
интегральном исполнении. Кроме того,
точность преобразования
ограничивается точностью и
стабильностью каждого компаратора и
резистивного делителя.
АЦП с параллельным преобразованием
88
89.
UвхΔ8
13/2h
Δ7
11/2h
Δ6
9/2h
Δ5
7/2h
Δ4
5/2h
Δ3
3/2h
Δ2
1/2h
Δ1
t
89
90.
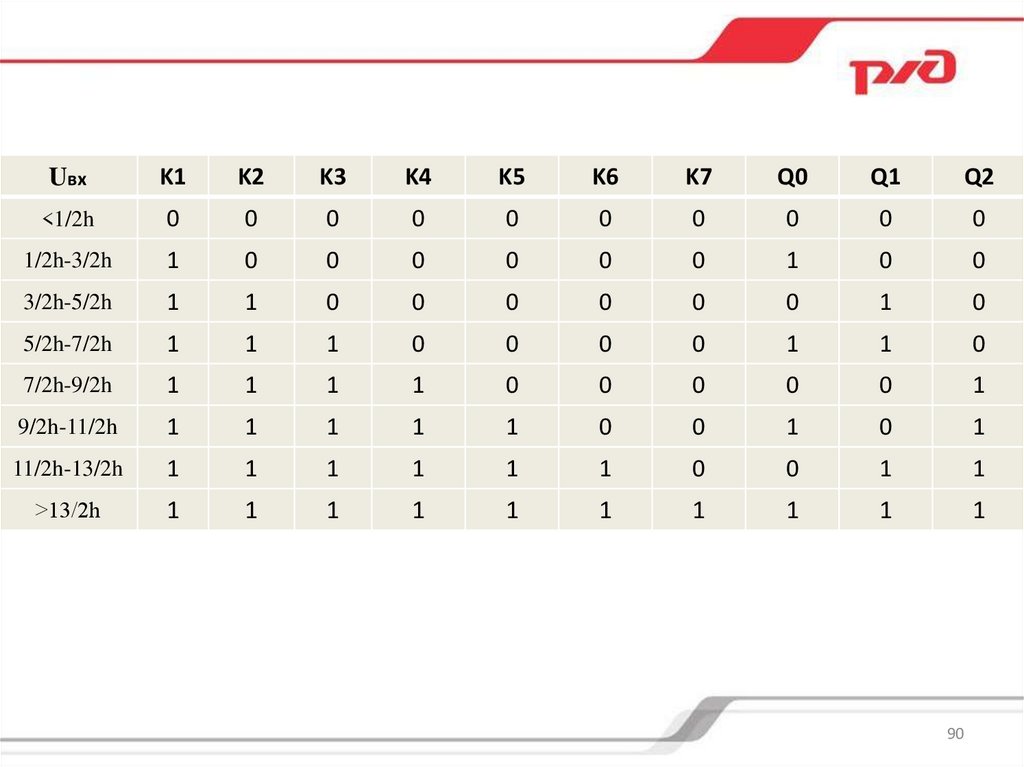
UвхK1
K2
K3
K4
K5
K6
K7
Q0
Q1
Q2
<1/2h
0
0
0
0
0
0
0
0
0
0
1/2h-3/2h
1
0
0
0
0
0
0
1
0
0
3/2h-5/2h
1
1
0
0
0
0
0
0
1
0
5/2h-7/2h
1
1
1
0
0
0
0
1
1
0
7/2h-9/2h
1
1
1
1
0
0
0
0
0
1
9/2h-11/2h
1
1
1
1
1
0
0
1
0
1
11/2h-13/2h
1
1
1
1
1
1
0
0
1
1
˃13/2h
1
1
1
1
1
1
1
1
1
1
90
91.
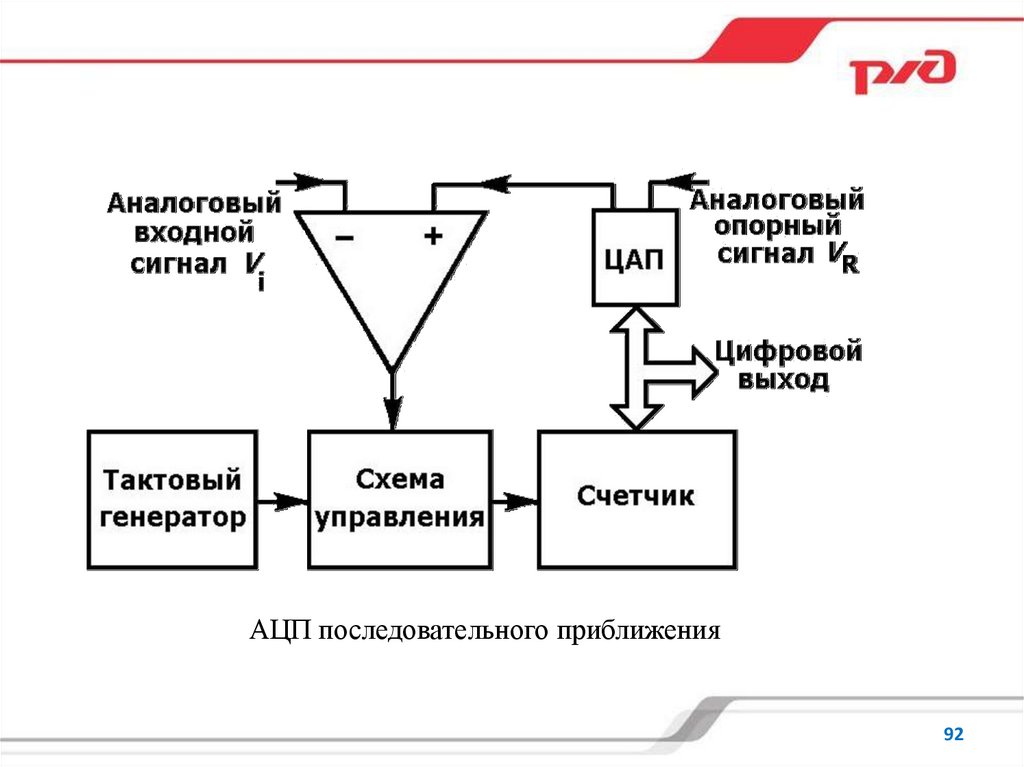
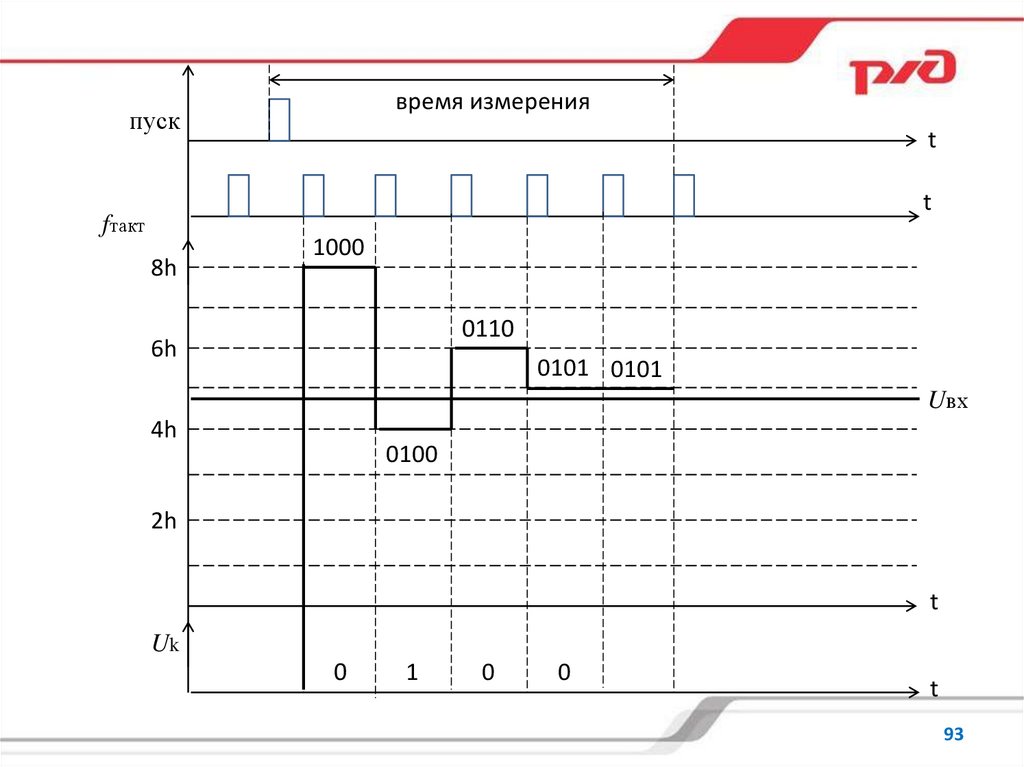
АЦП последовательного приближения состоит из следующих узлов:1. Компаратор. Он сравнивает входную величину и текущее значение «весового»
напряжения.
2. Цифро-аналоговый преобразователь. Он генерирует «весовое» значение
напряжения на основе поступающего на вход цифрового кода.
3. Регистр последовательного приближения. Он осуществляет алгоритм
последовательного приближения, генерируя текущее значение кода, подающегося
на вход ЦАП.
Достоинством устройства является относительно высокая скорость
преобразования: время преобразования N-битного АЦП составляет N тактов.
91
92.
АЦП последовательного приближения92
93.
время измеренияпуск
t
t
fтакт
8h
1000
0110
6h
0101 0101
Uвх
4h
0100
2h
t
Uk
0
1
0
0
t
93
94.
Наиболее простыми по структуре среди интегрирующих преобразователейявляются АЦП с преобразованием напряжения в частоту, построенные на базе
интегрирующего усилителя и аналогового компаратора. Погрешность их
преобразования определяется нестабильностью порога срабатывания компаратора
и постоянной времени интегратора. Более высокими метрологическими
характеристиками обладают АЦП, реализованные по принципу двойного
интегрирования, поскольку при этом практически удается исключить влияние на
погрешность преобразования нестабильности порога срабатывания компаратора и
постоянной времени интегратора.
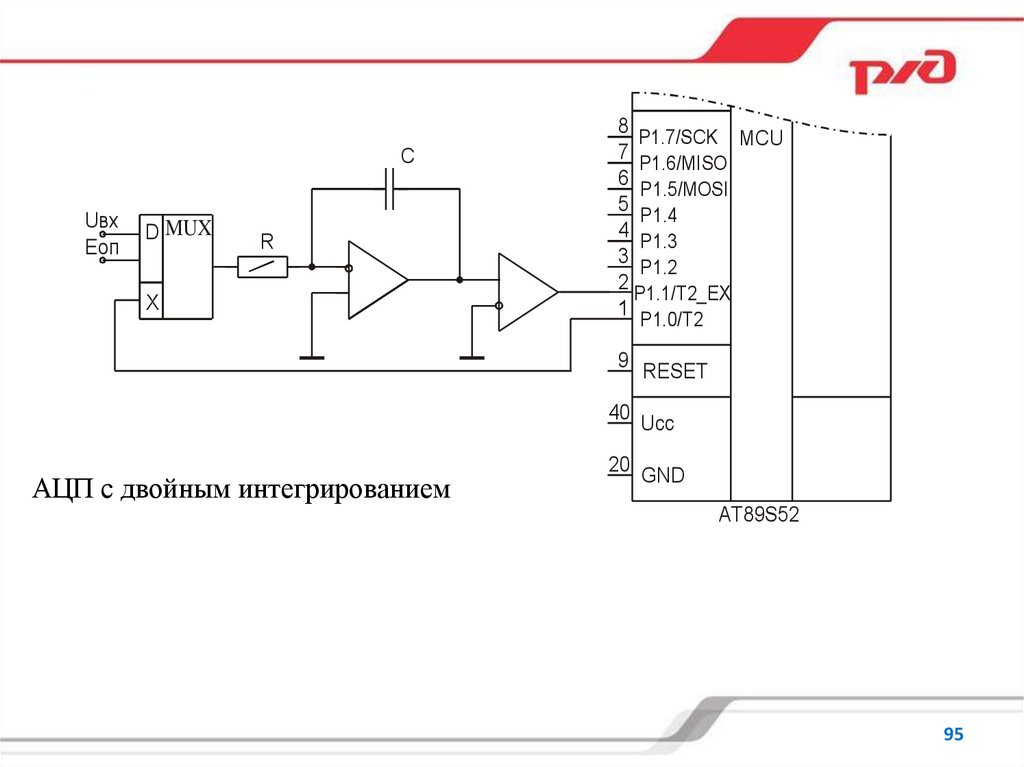
Схема реализации АЦП двойного интегрирования на МК-51 показана на рисунке.
Первоначально на вход интегратора подается отрицательное напряжение Еоп.
При этом на выходе интегратора через некоторое время установится
отрицательный уровень, а на выходе компаратора будет сформирован сигнал 0.
94
95.
CUвх
Еоп
D MUX
R
X
8 P1.7/SCK
MCU
7 P1.6/MISO
6 P1.5/MOSI
5 P1.4
4
P1.3
3 P1.2
2
P1.1/T2_EX
1 P1.0/T2
9 RESET
40
АЦП с двойным интегрированием
20
Ucc
GND
AT89S52
95
96.
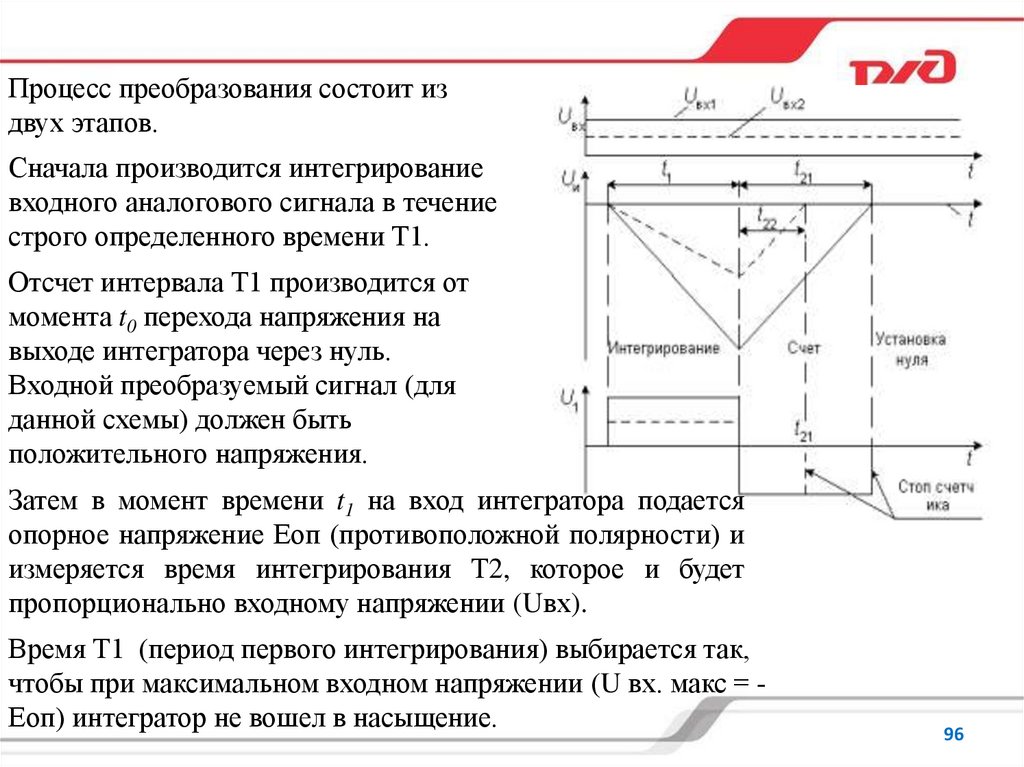
Процесс преобразования состоит издвух этапов.
Сначала производится интегрирование
входного аналогового сигнала в течение
строго определенного времени Т1.
Отсчет интервала Т1 производится от
момента t0 перехода напряжения на
выходе интегратора через нуль.
Входной преобразуемый сигнал (для
данной схемы) должен быть
положительного напряжения.
Затем в момент времени t1 на вход интегратора подается
опорное напряжение Еоп (противоположной полярности) и
измеряется время интегрирования Т2, которое и будет
пропорционально входному напряжении (Uвх).
Время Т1 (период первого интегрирования) выбирается так,
чтобы при максимальном входном напряжении (U вх. макс = Еоп) интегратор не вошел в насыщение.
96
97.
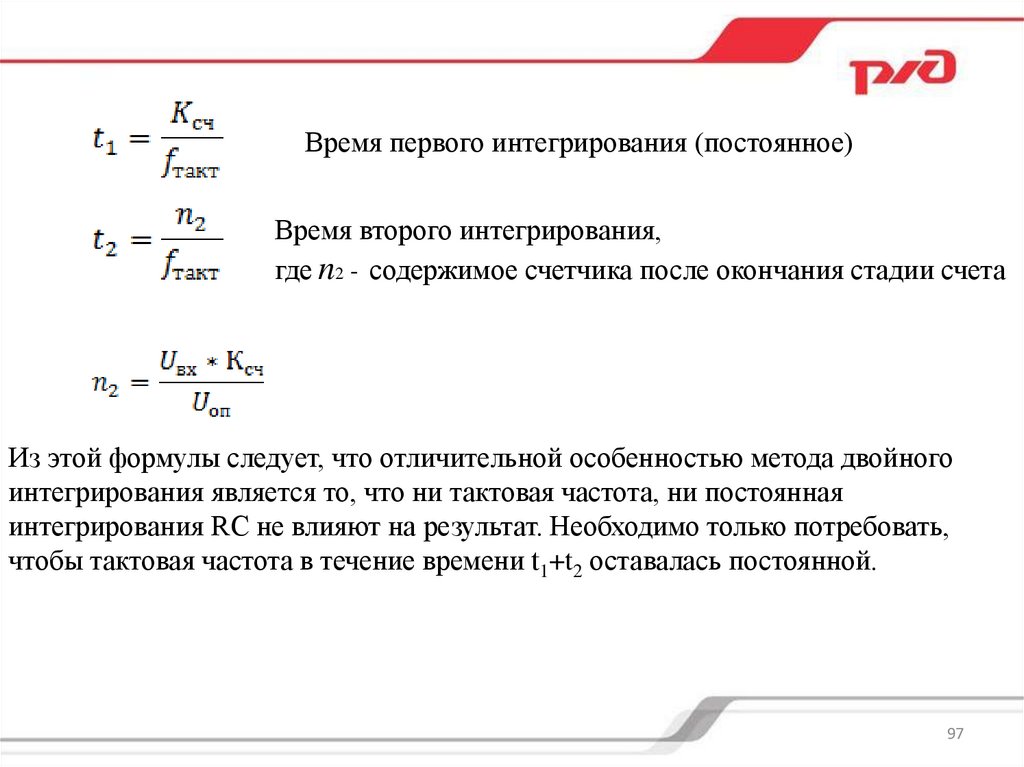
Время первого интегрирования (постоянное)Время второго интегрирования,
где n2 - содержимое счетчика после окончания стадии счета
Из этой формулы следует, что отличительной особенностью метода двойного
интегрирования является то, что ни тактовая частота, ни постоянная
интегрирования RC не влияют на результат. Необходимо только потребовать,
чтобы тактовая частота в течение времени t1+t2 оставалась постоянной.
97
98.
Цифро-аналоговые преобразователиЦифро-аналоговый преобразователь (ЦАП) предназначен для автоматического
преобразования входных величин, представленных числовыми кодами, в
соответствующие им значения непрерывно изменяющихся во времени (т.е.
аналоговых) величин.
В схемах ЦАП обычно используется представление двоичного числа, состоящего
из нескольких разрядов, в виде суммы степеней числа 2.
Каждый разряд (если в нем записана единица) преобразуется в аналоговый
сигнал, пропорциональный числу 2 в степени, равной номеру разряда
В схеме ЦАП, показанной на рисунке, весовые коэффициенты каждого разряда
задаются последовательным делением опорного напряжения с помощью
резистивной матрицы типа R–2R,представляющей собой многозвенный делитель
напряжения.
В данной схеме ЦАП используются двухпозиционные ключи, которые
подсоединяют резисторы 2R либо ко входу операционного усилителя (при 1 в
данном разряде), либо к общему нулевому проводу.
98
99.
RUоп
1
2R
2R
2R
0
R
R
1
0
1
2R
0
1
2R
Roc
0
Uвых
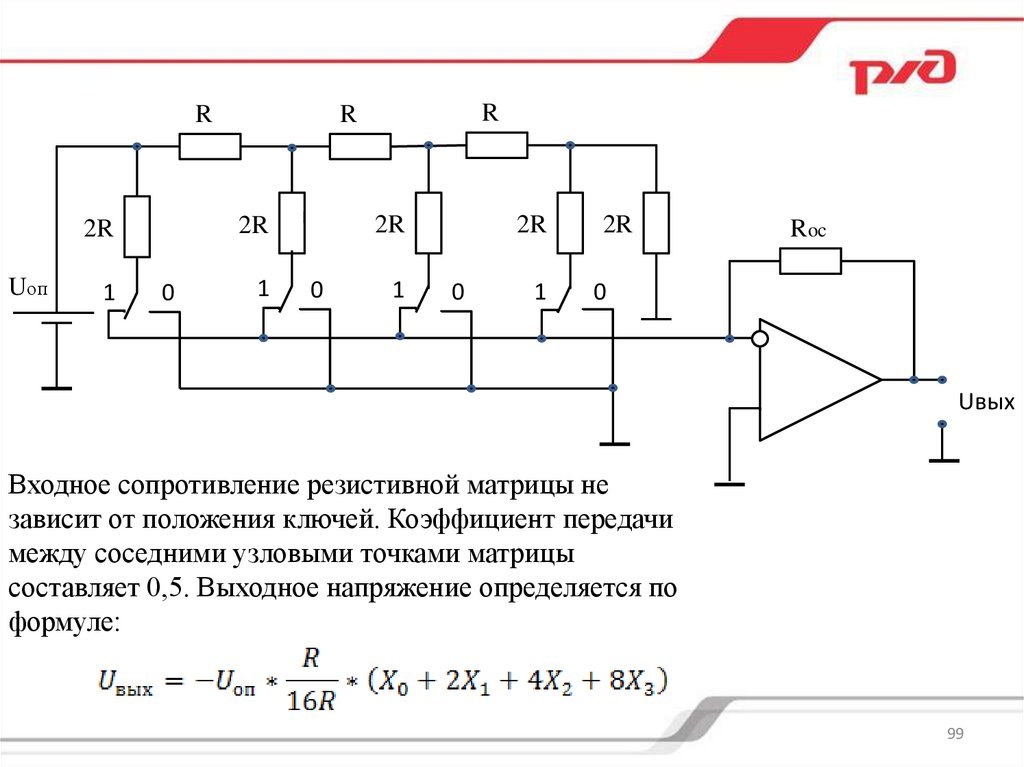
Входное сопротивление резистивной матрицы не
зависит от положения ключей. Коэффициент передачи
между соседними узловыми точками матрицы
составляет 0,5. Выходное напряжение определяется по
формуле:
99
100.
Классификация микропроцессорных информационноуправляющих систем на железнодорожном транспортеК основным таким системам относятся:
1) автоматизированные системы управления и контроля движения поездов;
2) автоматизированные системы управления расформированием составов на
сортировочных станциях;
3) автоматизированные системы диспетчерского контроля;
4) информационные системы обслуживания пассажиров.
Автоматизированные системы управления и контроля движения поездов
1) микропроцессорные системы автоблокировки;
2) микропроцессорные системы электрической централизации;
3) системы диспетчерского управления движением поездов;
4) микропроцессорные устройства контроля исправности подвижного состава;
5) микропроцессорные локомотивные системы обеспечения безопасности
движения поездов;
6) автоматизированные комплексы для испытания и диагностирования
узлов подвижного состава.
100
101.
Основные преимущества микропроцессорных систем1. Более высокий уровень надежности
2. Наличие встроенного диагностического контроля состояния аппаратных
средств
3. Сокращение капитальных вложений и эксплуатационных затрат
4. Улучшение условий труда эксплуатационного персонала
5. Возможность протоколировать и архивировать информацию
Основной проблемой создания МПИУС является обеспечение безопасности их
функционирования для процесса движения поездов.
Все методы построения безопасных систем управления основаны на введении в
устройства этих систем некоторой избыточности, которая позволяет исключать
возможность появления или своевременно обнаруживать и парировать опасные
отказы аппаратуры или сбои программных средств.
101
102.
Обеспечение безопасности в микропроцессорных информационно-управляющихсистемах
Недостатки полупроводниковой элементной базы по сравнению с релейной :
1. Низковольтные электронные компоненты обладают высокой
чувствительностью к внешним воздействиям
2. Невозможность создания полностью безопасной системы (в отличии от реле
(однонаправленный отказ) не имеют четкой направленности отказов в сторону
защитных состояний, последствия которых сложно предугадать);
3. Рабочие характеристики электронных компонентов с течением времени
могут меняться;
4. Высокая сложность электронных компонентов затрудняет предотвращение
систематических ошибок на этапе производства, а также контроль за
происходящим в технической системе процессами и изменением ее состояния.
102
103.
Структура программного обеспеченияПрограммное обеспечение (ПО)
Прикладное ПО
ПО
централизации
Системное ПО
Базы данных
Управление периферийным
оборудованием
Функции индикации
Функции управления
Функции ведения
диалога
Функции
протоколирования
Функции
информационного
обмена
Функции речевого
информирования
Другие функции
Управление вычислительными
процессами и ресурсами
Топологические данные
Данные настройки
специфических функций
Данные настройки
информационного
обмена
Конфигурация ЛВС
Конфигурация
аппаратных средств
Другие данные по
станции
Инициализация оборудования
Драйверы оборудования и
шрифтов
104.
Обеспечение безопасности в микропроцессорных системах:1. Избыточность позволяет исключить случайные ошибки в
микропроцессорных комплексах.
Пример аппаратной избыточности (системы 2оо2, 2оо3 и 2×2оо2).
Во всех системах обеспечивается резервирование с целью
повышения безопасности. В системах 2оо3 и 2×2оо2 – повышение
готовности к работе на случай возникновения неисправностей
(снижает вероятность задержек в поездной работе).
2. Диверситет помогает исключить систематические
ошибки при проектировании:
2.1. Аппаратный (в вычислительных каналах используется
аппаратное
обеспечение,
созданное
разными
группами
разработчиков);
2.2. Программный (1. За счет применения в вычислительных
каналах разных операционных систем Windows и Linux; 2. при
описании функций централизаций или задании данных,
описывающих топологию путевого развития.
105.
Обеспечение безопасности в микропроцессорных централизациях2 из 2 (2оо2)
Ввод
2 из 3 (2оо3)
Ввод
&
&
Вывод
&
Двойная система
2 из 2 (2×(2оо2))
Ввод
&
&
&
≥1
≥1
Вывод
Вывод
105
106.
Структура системы EBIlock 950106
107.
Структурная схема системы EBI lock-950Основной
компьютер
АРМ ДСП
ЦП
Резервный
компьютер
АРМ ПТО
Модемы
АРМ ШН
Петля
связи 1
КС1
Петля
. . .
связи 12
..
КС2
АРМ МУ
КС15
УБП
Шкаф ОК
ОК1
ОК2
. . .
ОК8
К напольным объектам
107
108.
Одним из перспективных направлений перехода накомпьютерные средства в устройствах станционной
автоматики является применение релейно-компьютерных или
релейно-процессорных (гибридных) систем, в которых
логические функции управления выполняются с помощью
вычислительных средств, а непосредственное управление
станционными объектами и функции обеспечения безопасности
реализуются традиционными средствами на электромагнитных
реле.
Примером гибридной системы релейно-процессорной
централизации (РПЦ) является система «Диалог-Ц».
108
109.
109110.
Электрическая схема контроля одногодвухпозиционного объекта платы УМВ-64/8-S
релейно-процессорная централизация «ЭЦ-МПК»
+5 В
П
1/3ПК
R1
R3
К контроллеру
М
R2
УМВ-64/8S
ТС-72
110
111.
Принципиальная схема управления релеплаты УДО-48P
А
R
М
ИР
VT
Реле типа РЭЛ (НМШ)
VR
П
LED
+5 В
УДО-48Р
ТУ-48
111
112.
К системам диспетчерского управления движением поездов относитсядиспетчерская централизация (ДЦ)
Диспетчерская централизация применяется для управления из центрального
поста (ЦП) стрелками и сигналами промежуточных станций, называемых
линейными пунктами (ЛП).
С одного ЦП можно управлять линейными пунктами одного или нескольких
диспетчерских участков.
ДЦ позволяет поездному диспетчеру (ДНЦ) руководить движением поездов на
участке и непосредственно управлять стрелками и сигналами на ЛП без участия
дежурных по соответствующим станциям.
В комплекс устройств ДЦ обязательно входят автоблокировка (или другие
устройства, обеспечивающие контроль свободности перегона) на перегонах, ЭЦ
на станциях и аппаратура телемеханики.
Устройства ДЦ должны обеспечивать:
1. Управление из одного пункта стрелками и светофорами раздельных пунктов
диспетчерского круга
112
113.
2. Контроль положения и свободности стрелок и изолированных участков,занятости перегонов и путей на станциях, индикацию показаний станционных
светофоров.
3. Возможность передачи отдельных станций на резервное или автономное
управление
4. Автоматическую запись графика исполненного движения (ГИД) поездов.
5. Передачу команд ТУ, безопасность выполнения которых определяется только
устройствами ДЦ и действиями оператора (ответственные команды)
Для устройств передачи информации основным методом обеспечения
безопасности является введение информационной избыточности в кодовые
комбинации управляющих и информационных сигналов (ТУ и ТС)
Это достигается передачей их помехозащищенными кодами с минимальным
кодовым расстоянием не менее dmin = 4.
dmin = r + s + 1
113
114.
ЦентрСтанция 1
D
Рабочая
станция
«Связь»
В
А
В
Станция 2
А
КП1
В
Станция 30
А
В
КП30
КП2
С
А
С
С
1
1
2
1
2
3
ЛВС
Обходной канал ТЧ
114
115.
1ТС[M(N-1)+1]
ТС(N+1)
ТС(1)
2
ТС(N+2)
ТС(N)
ТС(2N)
ТС[M(N-1)+2]
Шина
«ТС»
ТС(2)
N
1
ТС(NxM)
M
2
Шина «ОПР»
116.
БРКПвх8
МГР 1
вх1
Интерфейс RS-485
вх9
МГР 2
вх16
индикация
ШД
CPU
МВИ
вх24
МГР 3
вх17
интерфейс
программ
адрес МГР
вх32
МГР 4
вх25
узел
конф.
БП
18-36В
117.
Структурная схема БКПМСтык В
модем
4
COM1
ЦП G5066
LPT
модем
COM2
4
шина ISA
Устройство
индикации
5
4
3
7
6
Стык С
модем
Расширитель сом портов
1
Стык А
8
4
2
порт
параллельного
вывода
кросс-плата
блок гальванических развязок
Конвертер RS232/RS422(485)
c гальванической развязкой
Расш.
4
2
УЛ СПОК
к БРКП
4
АПК ДК
(СПД ЛП)
4
РПЦ
(МПЦ)
4
стык В группового
цифрового канала
ПК
к дешифратору
команд ТУ
но
нр
Т
118.
расш.Подключение БРКП к БКПМ
2 к БРКП
RS-485
БКПМ
БРКП1
БРКП2
БРКП32
119.
СПД-ЛП1. Сервер сигналов
- формирует сигналы запроса на линейные пункты;
- принимает информацию о состоянии объектов контроля с линейных пунктов;
- архивирует принятую информацию;
- автоматизированное ведение графика исполненного движения
2. Концентратор информации.
Предназначен для сбора поступающей информации по различным линиям
связи и передачи ее на сервер сигналов
Состав:
2.1. Модуль центрального процессора МЦП2
2.2. Модем (до 6 штук)
2.3. Блок питания
3. Контроллер
Предназначен для подключения к ОК с целью получения информации об их
состоянии и передачи этой информации на концентратор.
Состав:
3.1. Модуль центрального процессора МЦП2
3.2. Модем
3.3. Модуль ввода дискретных сигналов (до 7 штук)
3.4. Блок питания
119
120.
+5Vрелейная
С
Р
Пульт ДСП
Rогр
выход
МС
120
121.
МЦП-2№
п/п
Адрес
1
0000÷1FFF
ПЗУ
2
4000÷5FFF
ОЗУ
3
С000÷С0FF
0-я позиция, 1-й модуль МДВ
4
С400÷C4FF
1-я позиция, 2-й модуль МДВ
5
С800÷C8FF
2-я позиция, 3-й модуль МДВ
6
СC00÷CCFF
3-я позиция, 4-й модуль МДВ
7
D000÷D0FF
4-я позиция, 5-й модуль МДВ
8
D400÷D4FF
5-я позиция, 6-й модуль МДВ
9
D800÷D8FF
6-я позиция, 7-й модуль МДВ
10
DC00÷DCFF
7-я позиция, модем
11
E000÷E001
Контроллер прерываний
12
E400÷E403
Таймер 1
13
EC00÷EС01
Последовательный интерфейс
14
F400÷F403
Таймер 2
Объект
121
122.
ZХ2
LP8
Х1
&
Y=X1 (X2=0)
Y=1 (X2=1)
Y=X1*X2
Х2
LA3
Х1
1
Х2
LE1
Y=X1+X2
Управляющие
входы
Х1
Адресные
входы
Дешифратор адреса
0
A0 DC
1
A1
2
A2
3
4
E3
E2
E1
5
6
7
E3, E2, E1 – разрешение/запрет дешифрации
Запрет – выходы (0 – 7) =«1»
Разрешение – 100
Разрешение – «0» на одном выходе в соответствии с таблицей:
122
123.
А139
10
А12 А11 А10
Z1
8
LP8
А14
12
13
Z2
11
+5V
LP8
1
А15
&1
2
4
5
&2
LA3
9
6
LA3
3
&3
10
8
ROM
LA3
12
8
9
А15
1
LE1
0
A0 DC
1
A1
2
A2
3
4
5
E3
E2
6
E1 1 7
10
13
&4
LA3
11
RAM
A0 DC 0
1
A1
2
A2
3
4
5
E3
E2
6
E1 2 7
CSC0
CSC4
CSC8
CSCC
CSD0
CSD4
CSD8
CSDC
WN59
WI53
CS51
WI53
123
124.
А15А14
А13
А12
А11
А10
А9
А8
А7
А6
А5
А4
А3
А2
А1
А0
0
0
0
1
1
1
1
1
1
1
1
1
1
1
1
1
А13
0
0
А12 А11 А10
Z1
0
LP8
А14
0
0
Z2
0
A0 DC
1 1
A1
A2 1 2
3
4
5
E3
E2 1 6
E1 10 7
1
0
+5V
LP8
0
А15
&1
0
1
LA3
0
0
&2
1
1
LA3
&3
1
0
ROM
LA3
1
0
0
А15
1
LE1
1
0
&4
LA3
1
RAM
1 0
A0 DC
A1 1 1
A2 1 2
3
4
E3 0 5
E2 1 6
E1 21 7
CSC0
CSC4
CSC8
CSCC
CSD0
CSD4
CSD8
CSDC
WN59
WI53
CS51
WI53
124
125.
А15А14
А13
А12
А11
А10
А9
А8
А7
А6
А5
А4
А3
А2
А1
А0
1
1
0
1
1
0
0
0
1
1
1
1
1
1
1
1
А13
0
0
А12 А11 А10
Z1
0
LP8
А14
1
0
Z2
1
+5V
LP8
1
А15
&1
1
1
1
&2
LA3
&3
0
1
ROM
LA3
0
0
1
А15
1
LE1
0
A0 DC
1
1
A1 1
2
A2
3
4
E3 0 5
E2
6
0
E1 1 7
LA3
0
0
0
0
0
1
&4
LA3
1
RAM
0
A0 DC 0
A1 1 1
A2 1 2
3
4
E3 0 5
E2 0 6
E1 20 7
CSC0
CSC4
CSC8
CSCC
CSD0
CSD4
CSD8
CSDC
WN59
WI53
CS51
WI53
125
126.
модемК
К1821
КИ
ПЗУ
ША
ДША
ОЗУ
МЦП-2
Шина данных
МДВ-3
МДВ-3
МДВ-3
1-29ОК
1-29ОК
1-29ОК
МДВ-3
МДВ-3
МДВ-3
МДВ-3
1-29ОК
1-29ОК
1-29ОК
1-29ОК
126