





















")





 electronics
electronicsSimilar presentations:
")
")








Вычисление физического адреса
1. Вычисление физического адреса
2.
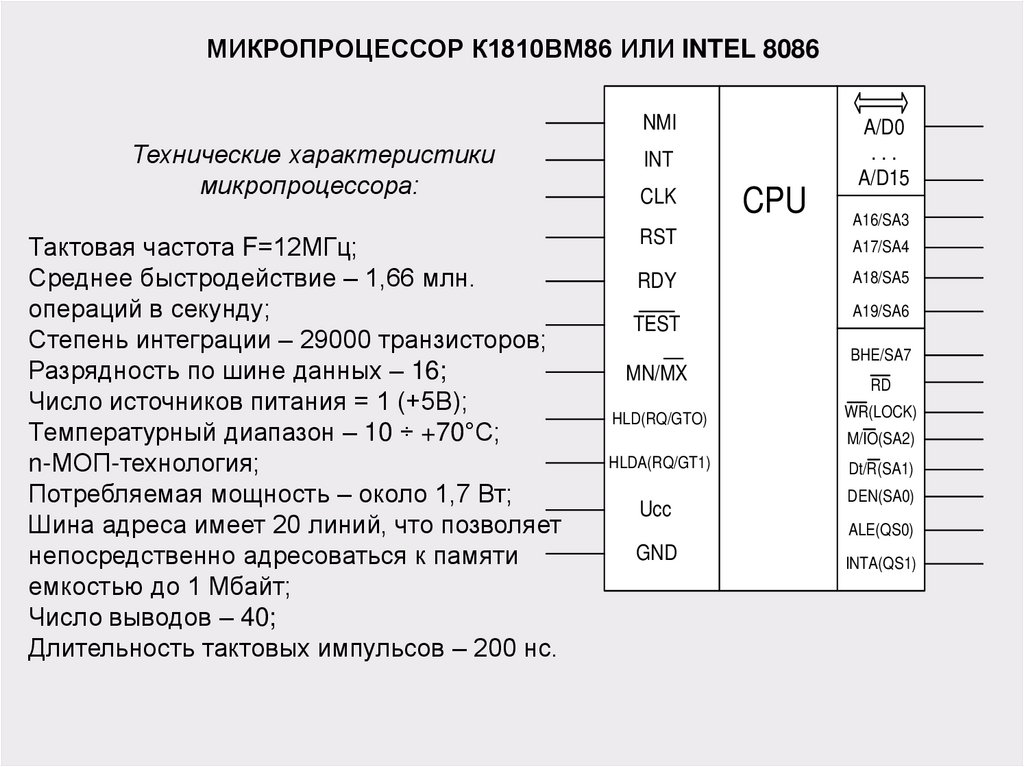
МИКРОПРОЦЕССОР К1810ВМ86 ИЛИ INTEL 8086NMI
Технические характеристики
микропроцессора:
Тактовая частота F=12МГц;
Среднее быстродействие – 1,66 млн.
операций в секунду;
Степень интеграции – 29000 транзисторов;
Разрядность по шине данных – 16;
Число источников питания = 1 (+5В);
Температурный диапазон – 10 ÷ +70°С;
n-МОП-технология;
Потребляемая мощность – около 1,7 Вт;
Шина адреса имеет 20 линий, что позволяет
непосредственно адресоваться к памяти
емкостью до 1 Мбайт;
Число выводов – 40;
Длительность тактовых импульсов – 200 нс.
INT
CLK
RST
RDY
TEST
CPU
A/D0
...
A/D15
A16/SA3
A17/SA4
A18/SA5
A19/SA6
BHE/SA7
MN/MX
HLD(RQ/GTO)
RD
WR(LOCK)
M/IO(SA2)
HLDA(RQ/GT1)
Ucc
Dt/R(SA1)
DEN(SA0)
ALE(QS0)
GND
INTA(QS1)
3.
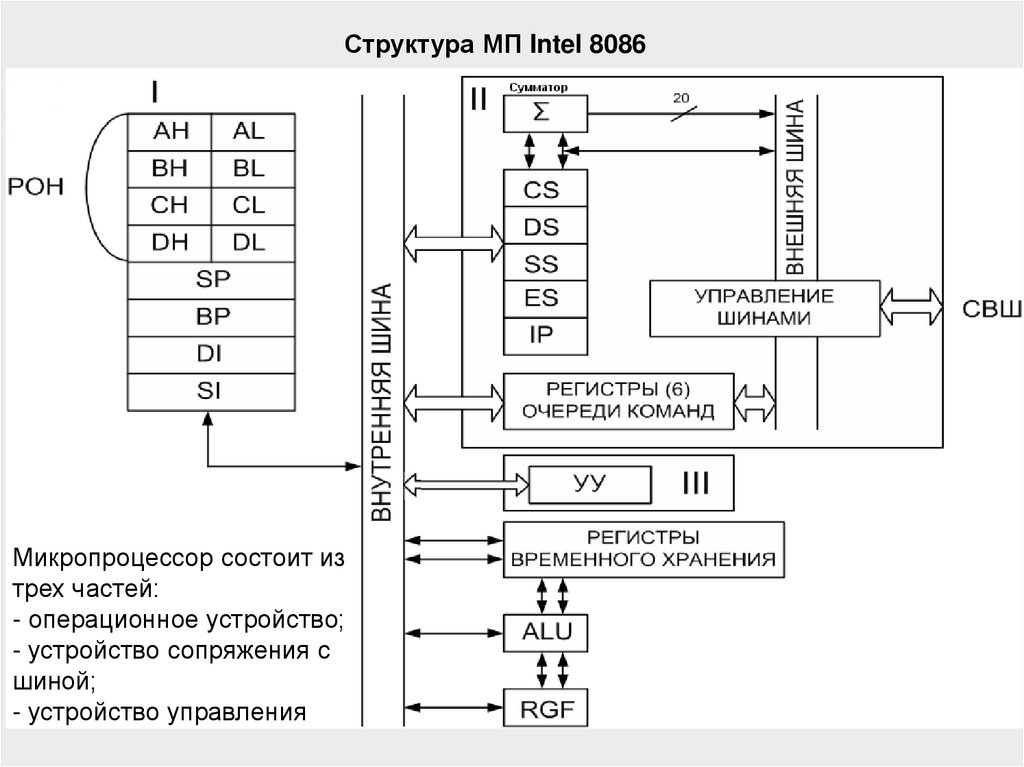
Структура МП Intel 8086Микропроцессор состоит из
трех частей:
- операционное устройство;
- устройство сопряжения с
шиной;
- устройство управления
4.
Система прерываний в МП Intel 8086ВНЕШНИЕ
ПРЕРЫВАНИЯ
МАСКИРУЕМЫЕ
ПРЕРЫВАНИЯ
INTR (тип n)
НЕМАСКИРУЕМЫЕ
ПРЕРЫВАНИЯ
NMI (тип 2)
Программные прерывания
Данные прерывания
осуществляются по 2-байтной
команде INTn или по
однобайтной команде INT3.
СИСТЕМА ПРЕРЫВАНИЙ
ПРОГРАММНЫЕ
ПРЕРЫВАНИЯ
ВНУТРЕННИЕ
ПРЕРЫВАНИЯ
Ошибка деления (тип 0)
Команда INTR
n (тип n)
Переполнение (тип 4)
PIC или ВУ
Команда INT3 (тип 3)
Пошаговый режим
(тип 1)
Внешние прерывания
Внешние прерывания бывают маскируемые и
немаскируемые. Если прерывание маскируемое,
Внутренние прерывания
то запрос может быть от контроллера прерываний
Внутренние прерывания
или внешнего устройства.
характеризуются типом, который
либо предопределен, либо
содержится в коде команды.
5.
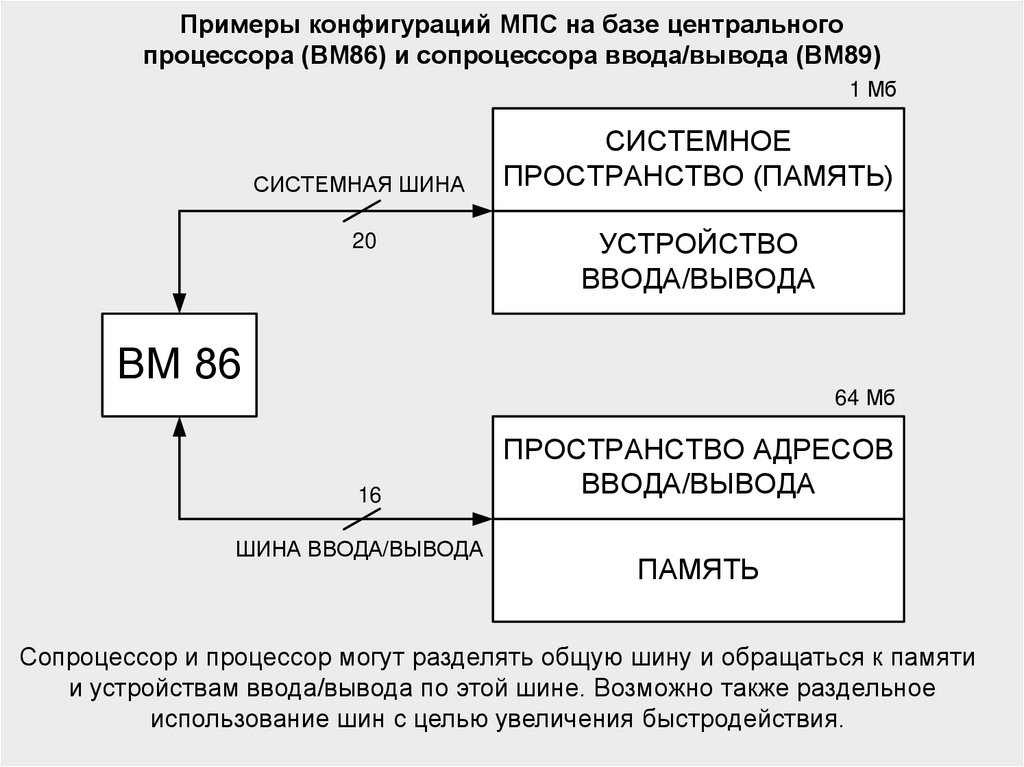
Примеры конфигураций МПС на базе центральногопроцессора (ВМ86) и сопроцессора ввода/вывода (ВМ89)
1 Мб
СИСТЕМНАЯ ШИНА
20
СИСТЕМНОЕ
ПРОСТРАНСТВО (ПАМЯТЬ)
УСТРОЙСТВО
ВВОДА/ВЫВОДА
ВМ 86
64 Мб
16
ШИНА ВВОДА/ВЫВОДА
ПРОСТРАНСТВО АДРЕСОВ
ВВОДА/ВЫВОДА
ПАМЯТЬ
Сопроцессор и процессор могут разделять общую шину и обращаться к памяти
и устройствам ввода/вывода по этой шине. Возможно также раздельное
использование шин с целью увеличения быстродействия.
6.
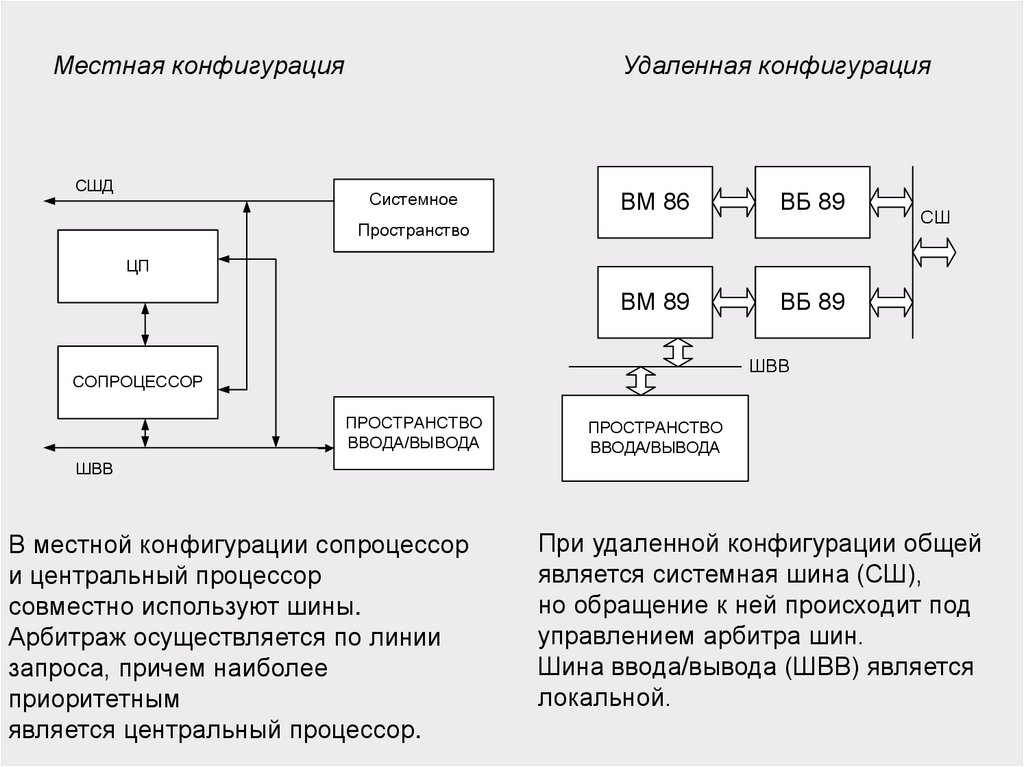
Местная конфигурацияСШД
Удаленная конфигурация
Системное
СП
ВМ 86
ВБ 89
ВМ 89
ВБ 89
Пространство
СШ
ЦП
ШВВ
СОПРОЦЕССОР
ПРОСТРАНСТВО
ВВОДА/ВЫВОДА
ПРОСТРАНСТВО
ВВОДА/ВЫВОДА
ШВВ
В местной конфигурации сопроцессор
и центральный процессор
совместно используют шины.
Арбитраж осуществляется по линии
запроса, причем наиболее
приоритетным
является центральный процессор.
При удаленной конфигурации общей
является системная шина (СШ),
но обращение к ней происходит под
управлением арбитра шин.
Шина ввода/вывода (ШВВ) является
локальной.
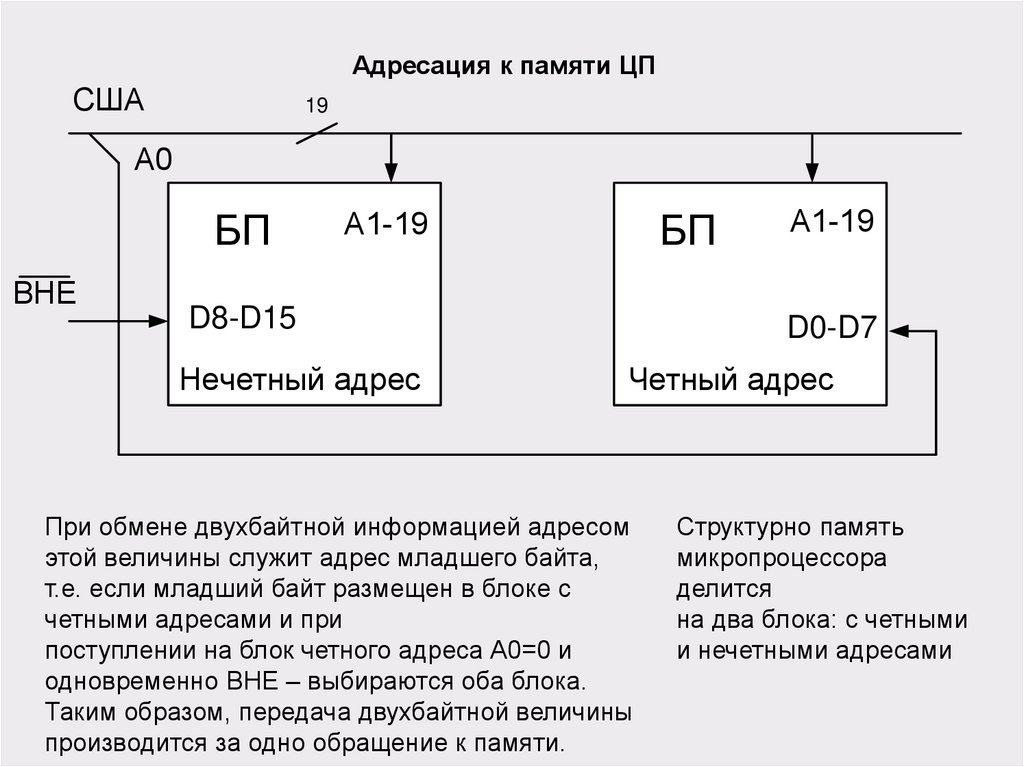
7.
Адресация к памяти ЦПСША
19
А0
БП
ВНЕ
А1-19
БП
D8-D15
Нечетный адрес
А1-19
D0-D7
Четный адрес
При обмене двухбайтной информацией адресом
этой величины служит адрес младшего байта,
т.е. если младший байт размещен в блоке с
четными адресами и при
поступлении на блок четного адреса А0=0 и
одновременно ВНЕ – выбираются оба блока.
Таким образом, передача двухбайтной величины
производится за одно обращение к памяти.
Структурно память
микропроцессора
делится
на два блока: с четными
и нечетными адресами
8.
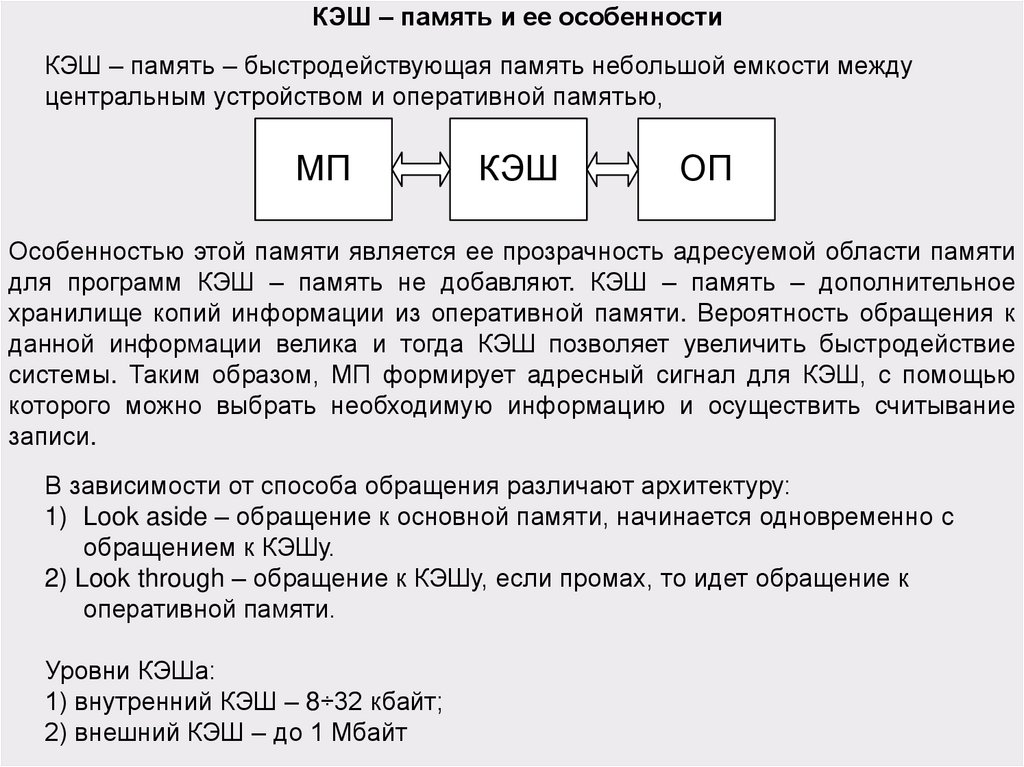
КЭШ – память и ее особенностиКЭШ – память – быстродействующая память небольшой емкости между
центральным устройством и оперативной памятью,
МП
КЭШ
ОП
Особенностью этой памяти является ее прозрачность адресуемой области памяти
для программ КЭШ – память не добавляют. КЭШ – память – дополнительное
хранилище копий информации из оперативной памяти. Вероятность обращения к
данной информации велика и тогда КЭШ позволяет увеличить быстродействие
системы. Таким образом, МП формирует адресный сигнал для КЭШ, с помощью
которого можно выбрать необходимую информацию и осуществить считывание
записи.
В зависимости от способа обращения различают архитектуру:
1) Look aside – обращение к основной памяти, начинается одновременно с
обращением к КЭШу.
2) Look through – обращение к КЭШу, если промах, то идет обращение к
оперативной памяти.
Уровни КЭШа:
1) внутренний КЭШ – 8÷32 кбайт;
2) внешний КЭШ – до 1 Мбайт
9.
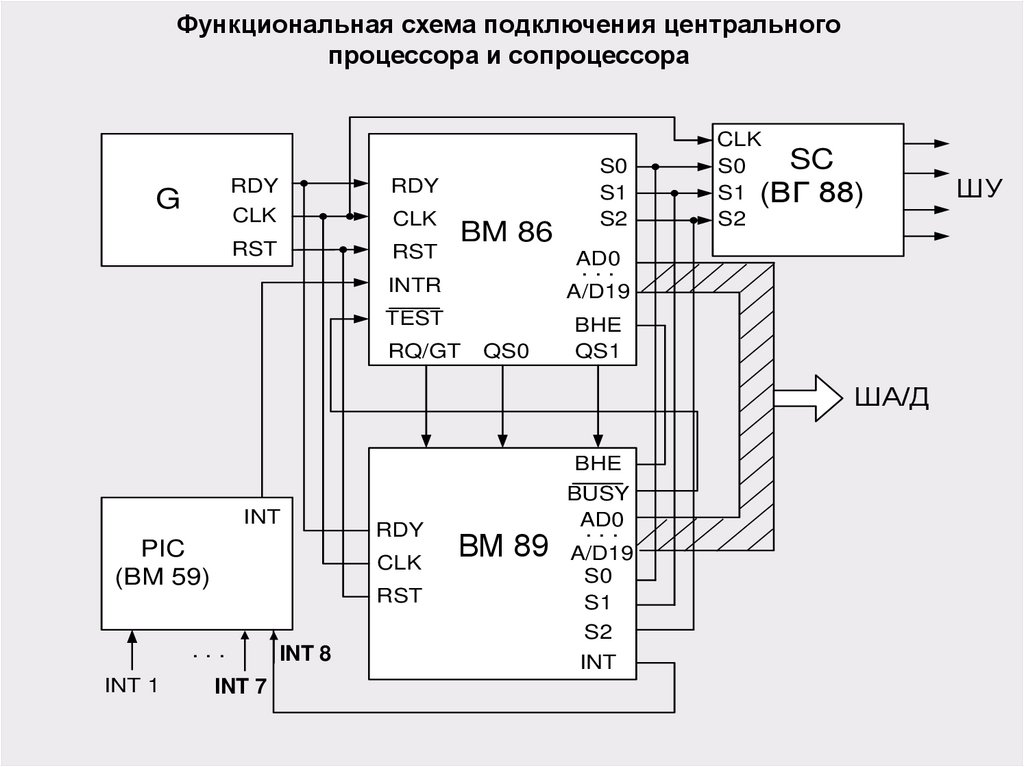
Функциональная схема подключения центральногопроцессора и сопроцессора
G
RDY
RDY
CLK
CLK
RST
RST
BM 86
S0
S1
S2
CLK
SC
S0
S1 (ВГ 88)
S2
AD0
...
INTR
A/D19
TEST
BHE
QS1
RQ/GT
QS0
ША/Д
BHE
INT
PIC
(BM 59)
CLK
RST
...
INT 1
RDY
INT 7
BM
ВМ 86
89
BUSY
AD0
...
A/D19
S0
S1
S2
INT 8
INT
ШУ
10.
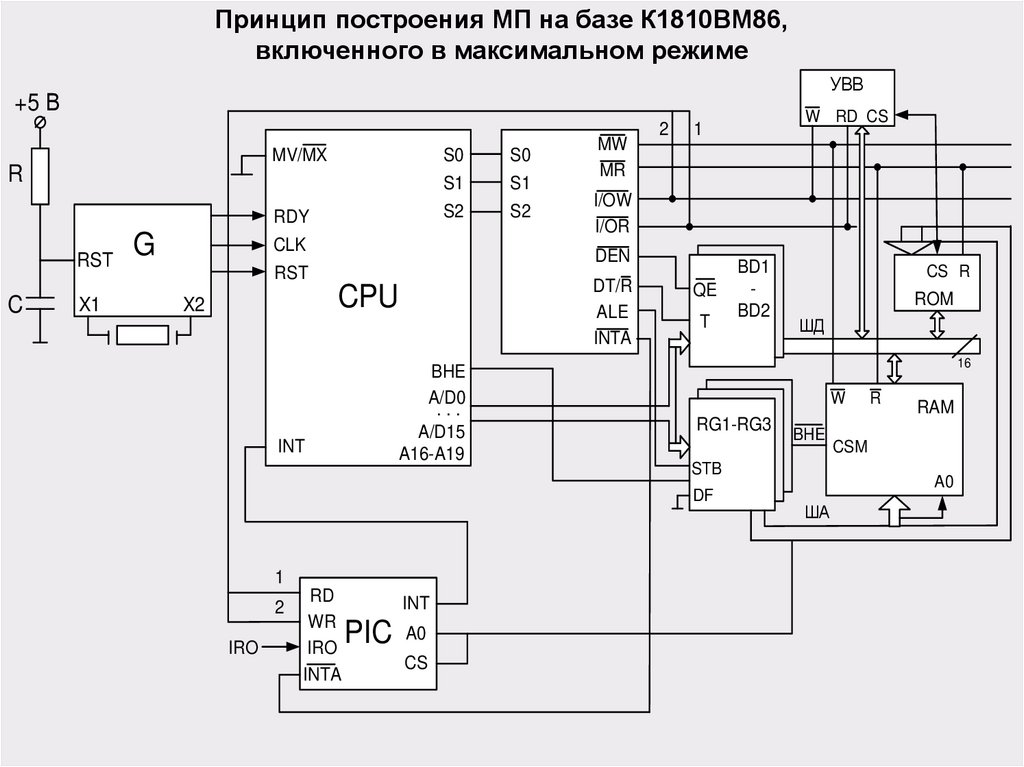
Принцип построения МП на базе К1810ВМ86,включенного в максимальном режиме
УВВ
+5 В
MV/MX
R
RDY
RST
C
X1
G
S0
S0
S1
S1
S2
S2
CLK
I/OW
I/OR
DT/R
ALE
INTA
CPU
BHE
A/D0
...
A/D15
A16-A19
INT
QE
T
2
IRO
RD
WR
IRO
INTA
INT
PIC
A0
CS
BD1
BD2
CS R
ROM
ШД
16
W
RG1-RG3
BHE
STB
DF
1
W RD CS
1
DEN
RST
X2
MW
MR
2
R
RAM
CSM
A0
ША
11.
МИКРОКОНТРОЛЛЕРЫВнутренние компоненты МК:
АЛУ, устройство управления, регистры, счетчик
команд, стековый указатель, имеется внутренняя
(резидентная) память программ, внутренняя память
данных,
последовательный
и
параллельный
интерфейсы, таймеры-счетчики, сторожевой таймер,
генератор, АПЦ-преобразователь, ШИМ и др.
Достоинства микроконтроллеров:
- дешевизна;
- простота;
- компактность;
- RISC-архитектура.
12.
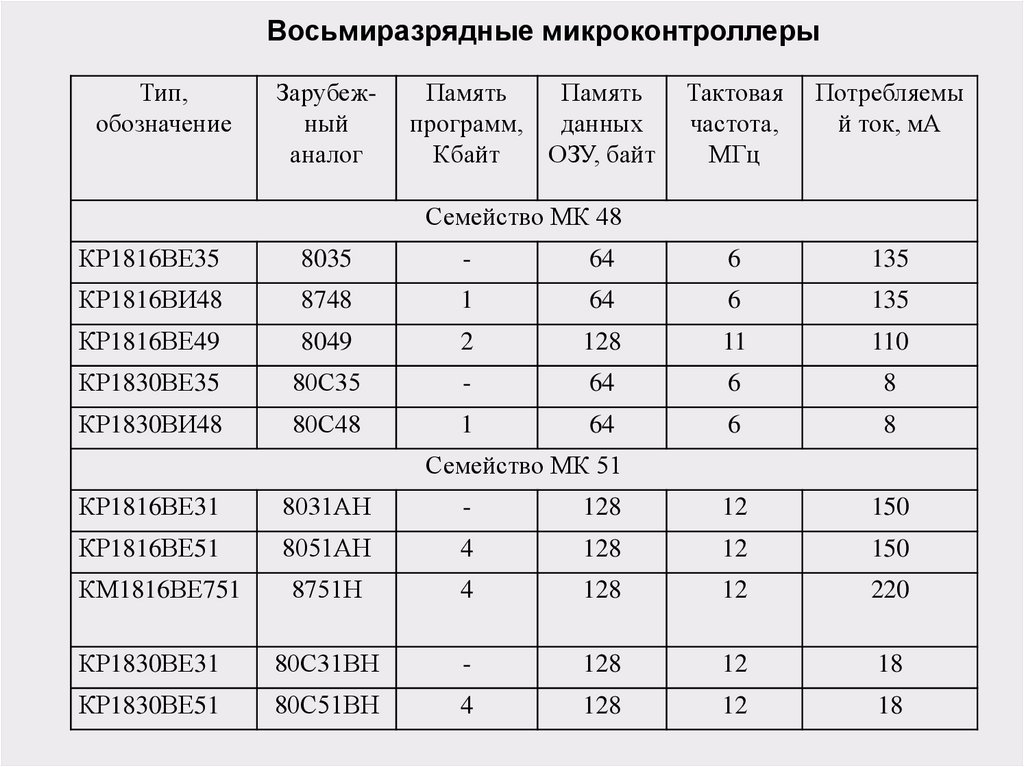
Восьмиразрядные микроконтроллерыТип,
обозначение
Зарубежный
аналог
Память
Память
программ, данных
Кбайт
ОЗУ, байт
Тактовая
частота,
МГц
Потребляемы
й ток, мА
Семейство МК 48
КР1816ВЕ35
8035
-
64
6
135
КР1816ВИ48
8748
1
64
6
135
КР1816ВЕ49
8049
2
128
11
110
КР1830ВЕ35
80С35
-
64
6
8
КР1830ВИ48
80С48
1
64
6
8
Семейство МК 51
КР1816ВЕ31
8031АН
-
128
12
150
КР1816ВЕ51
8051АН
4
128
12
150
8751Н
4
128
12
220
КР1830ВЕ31
80С31ВН
-
128
12
18
КР1830ВЕ51
80С51ВН
4
128
12
18
КМ1816ВЕ751
13.
Р1.0Р1.1
Р1.2
Порт Р1.3
Р1.4
1
Р1.5
Р1.6
Р1.7
СБР/АП
ВХПР
ВЫХПЕР
ЗПР0
Порт ЗПР1
3
Т0
Т1
ЗП
ЧТ
Х2
Х1
ОБЩ
(RST/VPD)
(RXD)
(TXD)
(INT0)
(INT1)
(WR)
(RD)
(XTAL2)
(XTAL1)
(VSS)
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
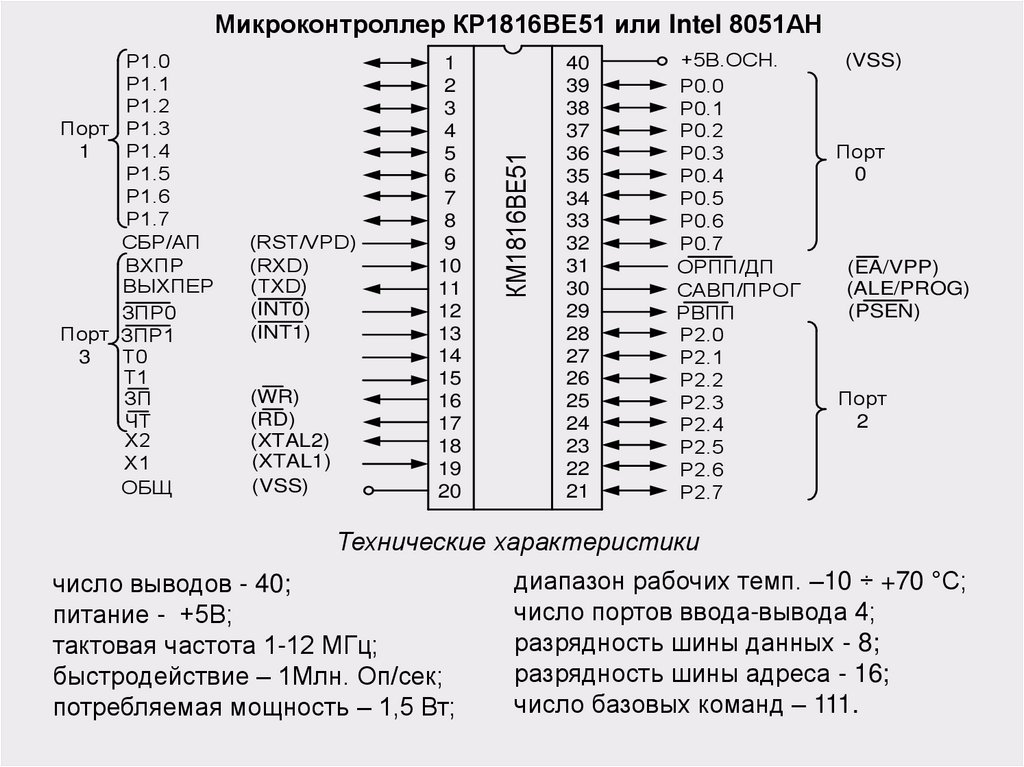
КМ1816ВЕ51
Микроконтроллер КР1816ВЕ51 или Intel 8051АН
40
39
38
37
36
35
34
33
32
31
30
29
28
27
26
25
24
23
22
21
+5В.ОСН.
Р0.0
Р0.1
Р0.2
Р0.3
Р0.4
Р0.5
Р0.6
Р0.7
ОРПП/ДП
САВП/ПРОГ
РВПП
Р2.0
Р2.1
Р2.2
Р2.3
Р2.4
Р2.5
Р2.6
Р2.7
(VSS)
Порт
0
(EA/VPP)
(ALE/PROG)
(PSEN)
Порт
2
Технические характеристики
число выводов - 40;
питание - +5В;
тактовая частота 1-12 МГц;
быстродействие – 1Млн. Оп/сек;
потребляемая мощность – 1,5 Вт;
диапазон рабочих темп. –10 ÷ +70 °С;
число портов ввода-вывода 4;
разрядность шины данных - 8;
разрядность шины адреса - 16;
число базовых команд – 111.
14.
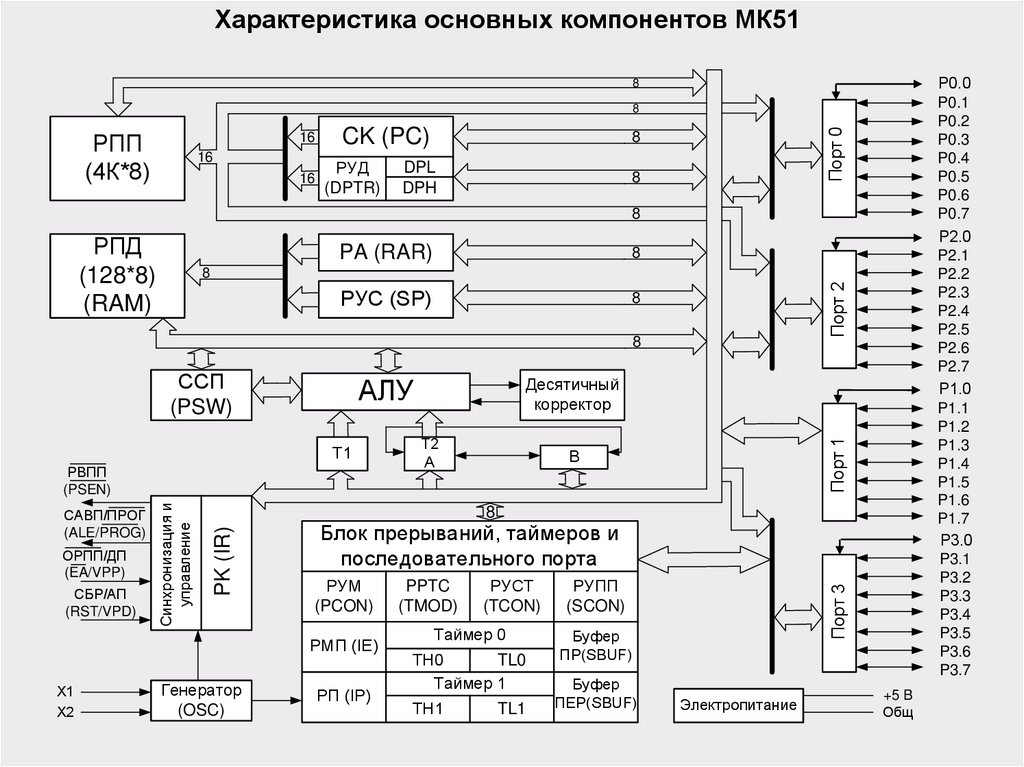
Характеристика основных компонентов МК51Р0.0
P0.1
P0.2
P0.3
P0.4
P0.5
P0.6
P0.7
Р2.0
P2.1
P2.2
P2.3
P2.4
P2.5
P2.6
P2.7
Р1.0
P1.1
P1.2
P1.3
P1.4
P1.5
P1.6
P1.7
Р3.0
P3.1
P3.2
P3.3
P3.4
P3.5
P3.6
P3.7
8
РПП
(4К*8)
16
16
16
CK (PC)
РУД
(DPTR)
Порт 0
8
8
DPL
DPH
8
8
РПД
(128*8)
(RAM)
PA (RAR)
8
РУС (SP)
8
Порт 2
8
8
АЛУ
Т1
СБР/АП
(RST/VPD)
Блок прерываний, таймеров и
последовательного порта
РУМ
(PCON)
РМП (IE)
Х1
Х2
В
Генератор
(OSC)
РП (IP)
PPTC
(TMOD)
РУСТ
(TCON)
Таймер 0
ТН0
TL0
Таймер 1
ТН1
TL1
РУПП
(SCON)
Порт 3
ОРПП/ДП
(EA/VPP)
Т2
А
8
PK (IR)
САВП/ПРОГ
(ALE/PROG)
Синхронизация и
управление
РВПП
(PSEN)
Десятичный
корректор
Порт 1
ССП
(PSW)
Буфер
ПР(SBUF)
Буфер
ПEР(SBUF)
Электропитание
+5 B
Общ
15.
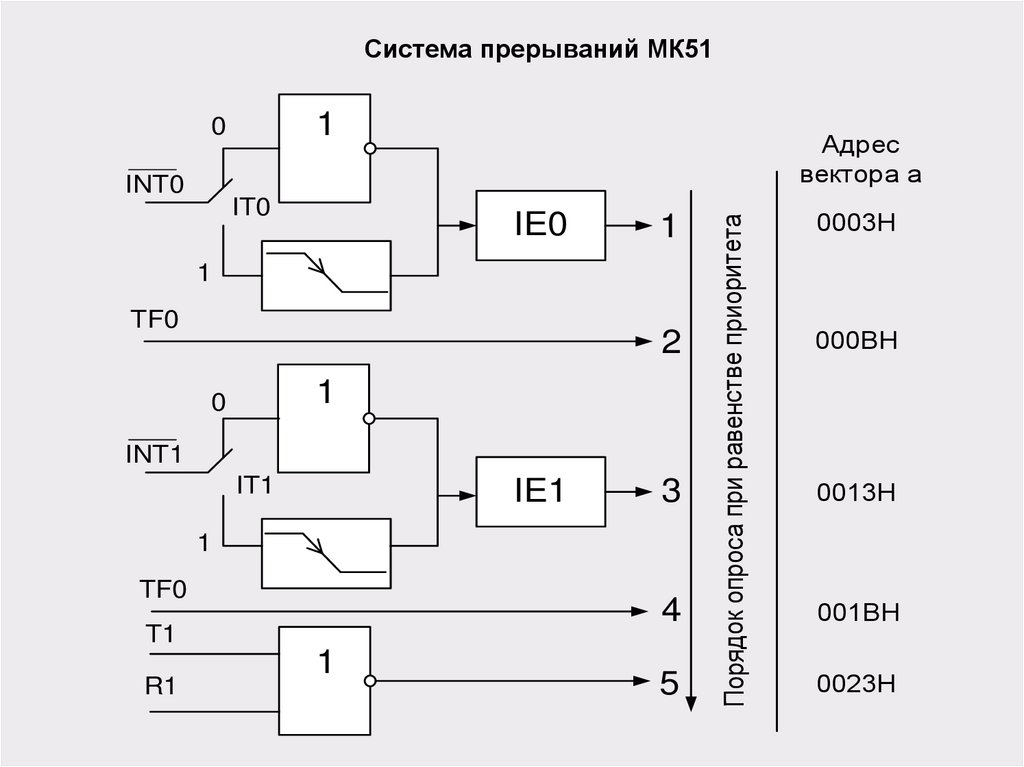
Система прерываний МК511
0
Адрес
вектора а
IT0
IE0
1
1
TF0
2
1
0
INT1
IT1
IE1
3
1
TF0
4
T1
R1
1
5
Порядок опроса при равенстве приоритета
INT0
0003Н
000ВН
0013Н
001ВН
0023Н
16.
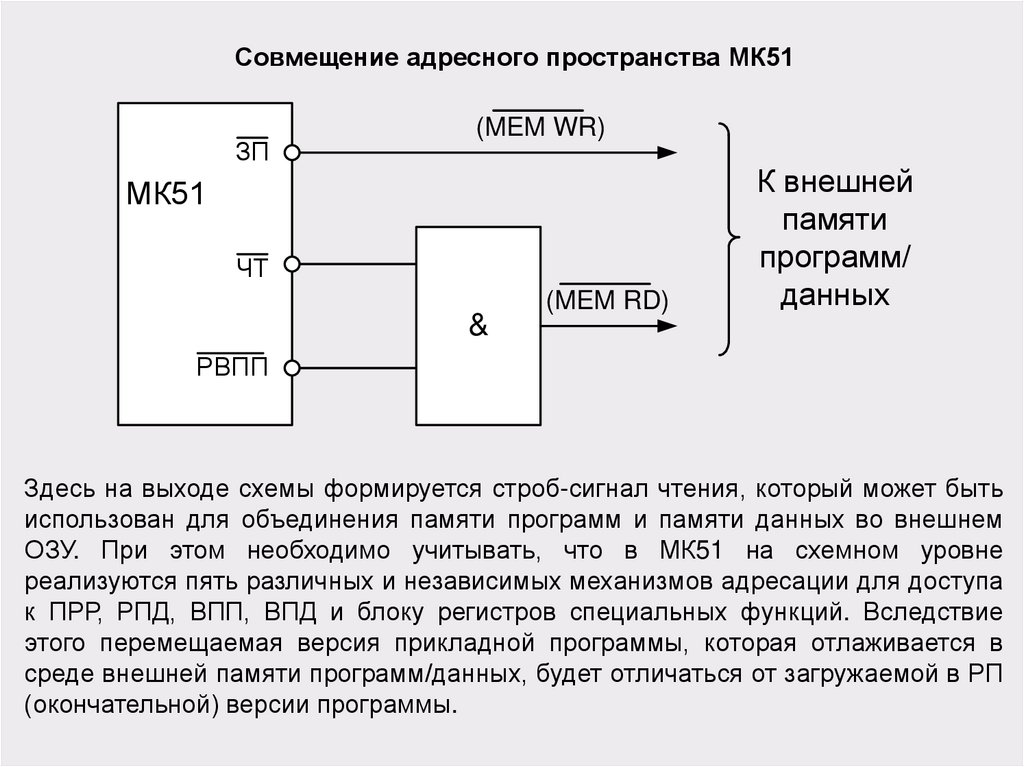
Совмещение адресного пространства МК51ЗП
(MEM WR)
МК51
ЧТ
&
(MEM RD)
К внешней
памяти
программ/
данных
РВПП
Здесь на выходе схемы формируется строб-сигнал чтения, который может быть
использован для объединения памяти программ и памяти данных во внешнем
ОЗУ. При этом необходимо учитывать, что в МК51 на схемном уровне
реализуются пять различных и независимых механизмов адресации для доступа
к ПРР, РПД, ВПП, ВПД и блоку регистров специальных функций. Вследствие
этого перемещаемая версия прикладной программы, которая отлаживается в
среде внешней памяти программ/данных, будет отличаться от загружаемой в РП
(окончательной) версии программы.
17. Последовательности выборки и выполнения команд
18. Программирование МК
C1BQ
C2
19. Запись бита защиты Бит защиты РПП, будучи установлен, запрещает доступ к РПП любыми внешними средствами
C1BQ
C2
20. Система команд в МК51
• Система команд в МК51• Система команд МК51 содержит 111 базовых команд, которые
удобно разделить по функциональному признаку на пять групп:
• команды передачи данных;
• арифметических операций;
• логических операций;
• передачи управления;
• операций с битами.
• Большинство команд (94) имеют формат один или два байта и
выполняются за один или два машинных цикла. При тактовой
частоте 2 МГц длительность машинного цикла составляет 1 мкс.
На рисунке показаны 13 типов команд МК51. Первый байт
команды любых типа и формата всегда содержит код операции
(КОП). Второй и третий байты содержат либо адреса
операндов, либо непосредственные операнды.
21. Типы операндов и форматы команд Состав операндов МК51 включает в себя операнды четырех типов: биты, 4-битные цифры, байты и
16-битные слова22.
Группа команд передачи данныхНазвание команды
Мнемокод
КОП
Т
Б
Ц
Операция
Пересылка в
аккумулятор из
регистра (n = 0 - 7)
MOV A, Rn
11101rrr
1
1
1
(A) = (Rn)
Пересылка в
аккумулятор прямо
адресуемого байта
MOV A, ad
11100101
3
2
1
(A) = (ad)
1110011i
1
1
1
(A) = ((Ri))
MOV A, #d
01110100
2
2
1
(A) = #d
MOV Rn, A
11111rrr
1
1
1
(Rn) = (A)
MOV Rn, ad
10101rrr
3
2
2
<font size="4
Пересылка в
аккумулятор байта из MOV A, @Ri
РДП (i = 0, 1)
Загрузка в
аккумулятор
константы
Пересылка в регистр
из аккумулятора
Пересылка в регистр
прямо адресуемого
байта
23.
Схема подключения МК к клавиатуре и дисплею сиспользованием контроллера, клавиатуры и дисплея
МК51
SMS
SMC
G
RS
CLK
RS
DD1
КР580 ВД79
Клавиатура
_
*
/
RL3
0
1
2
3
8
9
A
B
F1
RL4
4
C
F2
RL5
5
6
7
D
F3
E
F
F4
F5
P0.0
...
P0.7
DB0
...
DB7
RL0
P3.6
P3.7
P1.0
P1.1
ALE
WR
RD
AO
IRQ
CLK
RL1
RL2
RL6
RS
RL7
CS
CNTL
VD1-VD3
Shift
PCKD
1
SL0
SL1
2
3
SL2
DC
DD3
BD
OB
OA
0
1
2
3
0
1
2
3
4
4
5
6
7
5
6
7
R
4
4
HG
...
abcdefgh
24.
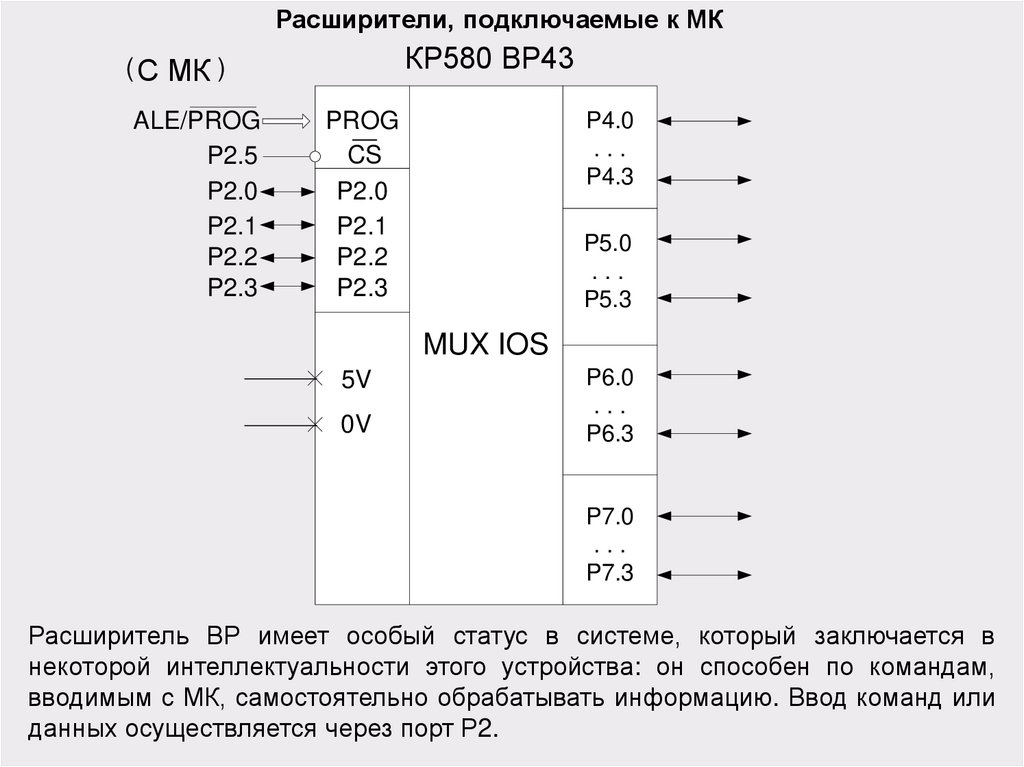
Расширители, подключаемые к МККР580 ВР43
( С МК )
ALE/PROG
P2.5
P2.0
P2.1
P2.2
P2.3
PROG
CS
P2.0
P2.1
P2.2
P2.3
P4.0
...
P4.3
P5.0
...
P5.3
MUX IOS
5V
0V
P6.0
...
P6.3
P7.0
...
P7.3
Расширитель ВР имеет особый статус в системе, который заключается в
некоторой интеллектуальности этого устройства: он способен по командам,
вводимым с МК, самостоятельно обрабатывать информацию. Ввод команд или
данных осуществляется через порт Р2.
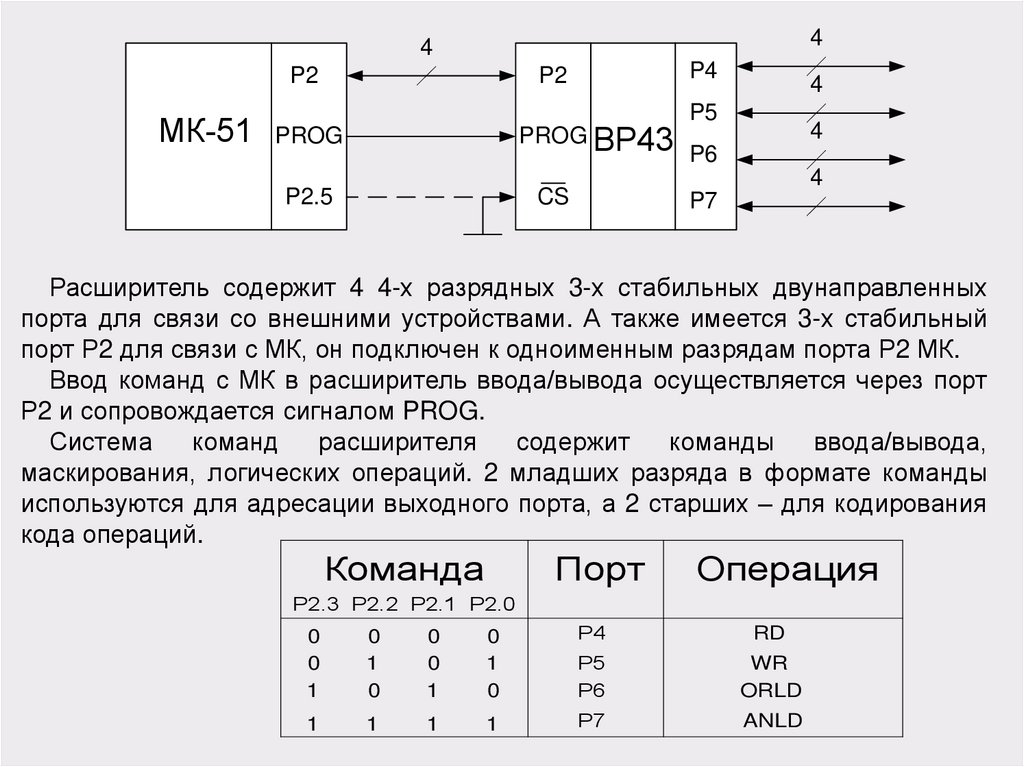
25.
44
P2
МК-51
P4
P2
PROG ВР43
PROG
P2.5
4
P5
4
P6
4
CS
P7
Расширитель содержит 4 4-х разрядных 3-х стабильных двунаправленных
порта для связи со внешними устройствами. А также имеется 3-х стабильный
порт Р2 для связи с МК, он подключен к одноименным разрядам порта Р2 МК.
Ввод команд с МК в расширитель ввода/вывода осуществляется через порт
Р2 и сопровождается сигналом PROG.
Система
команд
расширителя
содержит
команды
ввода/вывода,
маскирования, логических операций. 2 младших разряда в формате команды
используются для адресации выходного порта, а 2 старших – для кодирования
кода операций.
Команда
Порт
Операция
Р2.3 Р2.2 Р2.1 Р2.0
0
0
1
0
1
0
0
0
1
0
1
0
Р4
RD
Р5
Р6
WR
ORLD
1
1
1
1
Р7
ANLD
26.
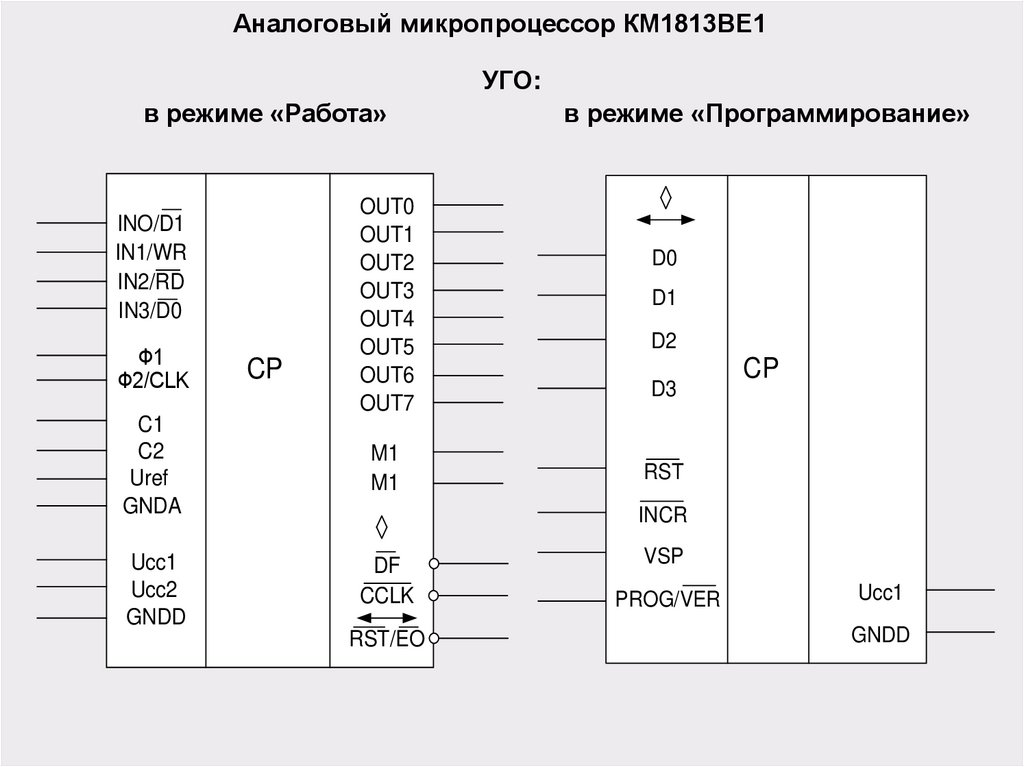
Аналоговый микропроцессор КМ1813ВЕ1УГО:
в режиме «Работа»
INO/D1
IN1/WR
IN2/RD
IN3/D0
Ф1
Ф2/CLK
CP
OUT0
OUT1
OUT2
OUT3
OUT4
OUT5
OUT6
OUT7
C1
C2
Uref
GNDA
M1
M1
Ucc1
Ucc2
GNDD
DF
CCLK
в режиме «Программирование»
D0
D1
D2
D3
CP
RST
INCR
RST/EO
VSP
PROG/VER
Ucc1
GNDD
27.
Технические характеристики КМ1813ВЕ1:1. Способ управления – микропрограммный;
2. Способ синхронизации – от внешнего или внутреннего генератора;
3. Разрядность АЛУ – 27 бит;
4. Разрядность данных – 25 бит;
5. Объем ПЗУ – 192*24 бит;
6. Объем ОЗУ – 40*26 бит;
7. Разрядность команд – 24 бит;
8. Устройство ввода/вывода – аналоговые и цифровые;
9. Число разрядов АЦП и ЦАП – 9 (8 + знак);
10. Число каналов ввода – 4;
11. Число каналов вывода – 8.
Микросхема КМ1813ВЕ1 представляет собой однокристальную
программируемую микро-ЭВМ с аналоговыми устройствами ввода/вывода,
предназначенную для цифровой обработки сигналов в реальном масштабе
времени.
На КМ1813ВЕ1 реализуют типовые функциональные узлы: фильтры нижних
и верхних частот, содержащие до 20 комплексных пар полюсов и нулей (фильтр
40-го порядка), детекторы, выпрямители, ограничители, умножители и делители
25-разрядных двоичных чисел, генераторы колебаний и функции –
аппроксимацмя, нелинейных функций.
28.
Структура системы самоконтроляМикропроцессор
Адаптер
Срыв
ОШ
Блок контроля
(счетчики)
Основная память
Дополнительная память
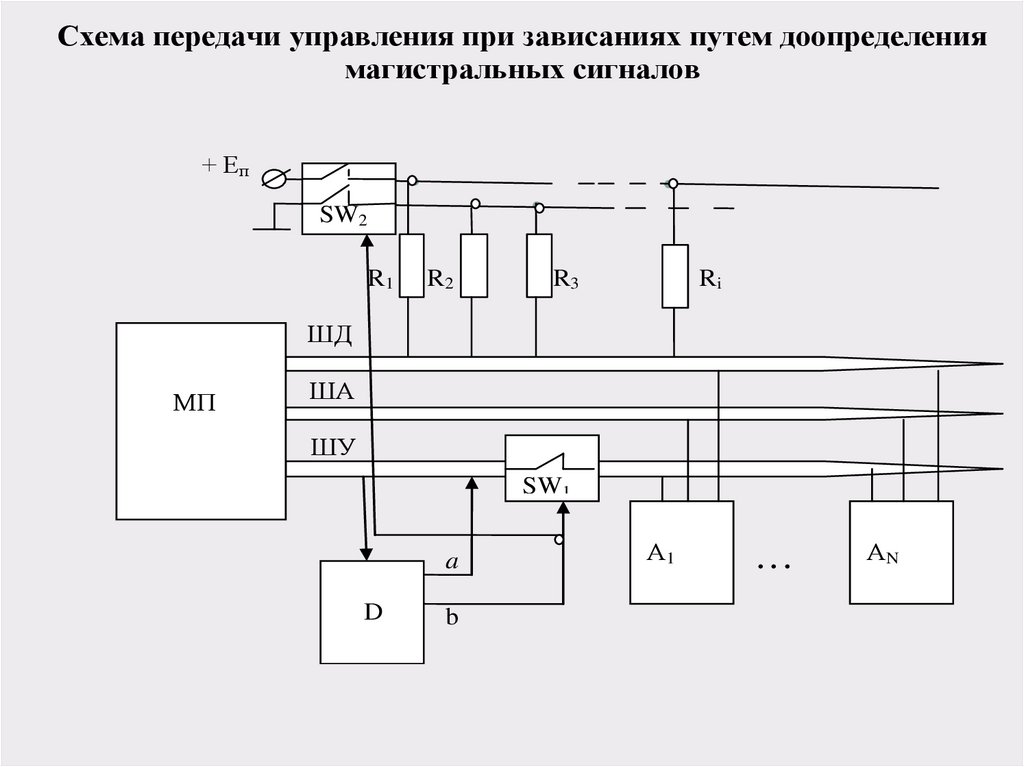
29.
Схема передачи управления при зависаниях путем доопределениямагистральных сигналов
+ Еп
SW2
aаа
R1
R2
R3
Ri
ШД
МП
ША
ШУ
SW1
Aaf
D
МП
a
А1
b
МП
...
АN
МП
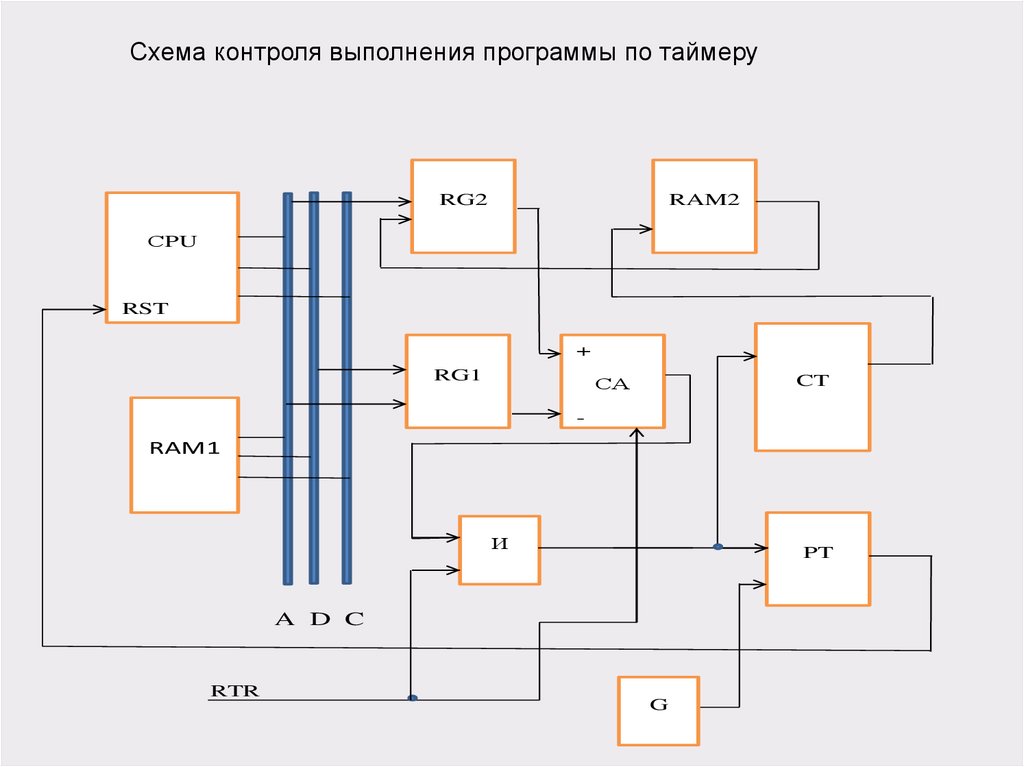
30.
Схема контроля выполнения программы по таймеруRG2
RAM2
СPU
RST
+
RG1
CT
СА
-____
RAM1
И
PT
A D C
RTR
G
31.
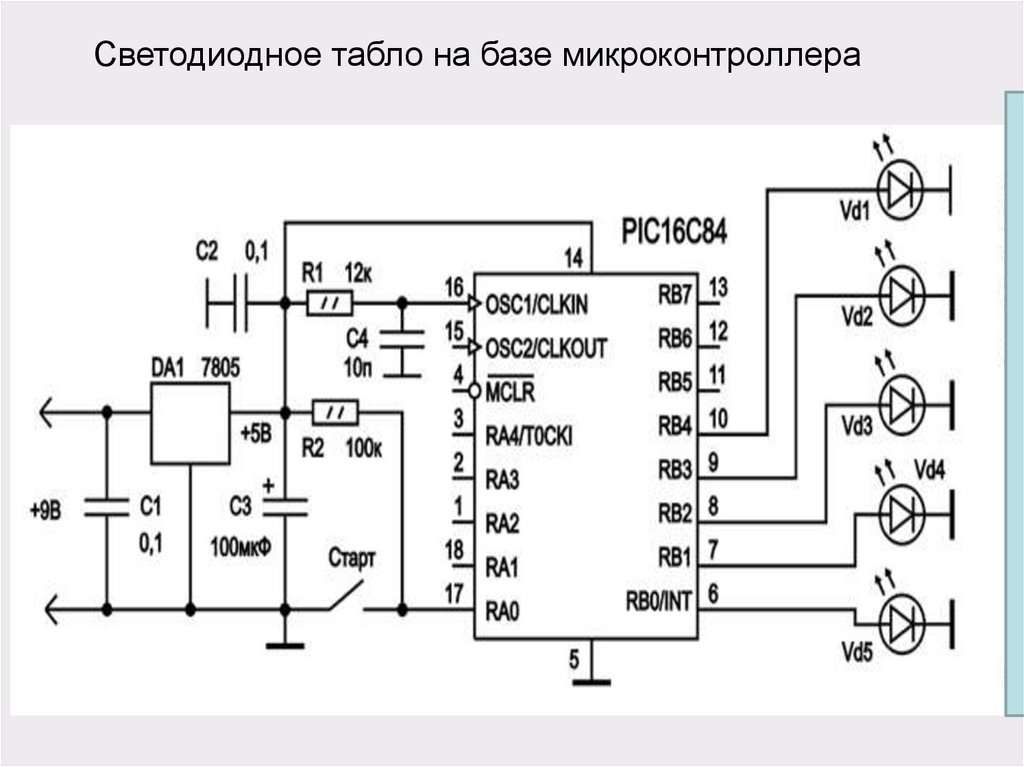
Светодиодное табло на базе микроконтроллера32.
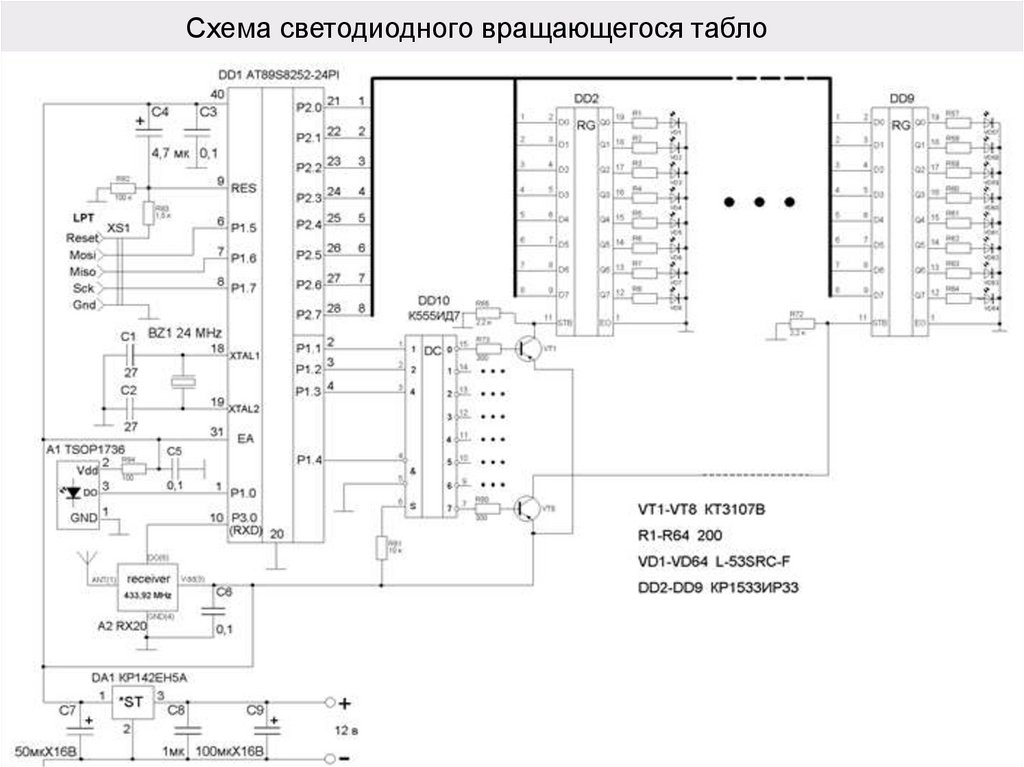
Схема светодиодного вращающегося табло33. Структурная схема терморегулятора
34. Решение задачи охлаждения пропорциональным методом регулирования
35. Двухпозиционный метод терморегулирования
36. Динамика процесса термостабилизации двухпозиционным методом
37. Структурная схема и уравнение ПИД - регулятора
Структурная схема и уравнение ПИД регулятора38. Структурная схема устройства
39. Принципиальная схема стенда
40. Алгоритм управляющей программы для микроконтроллера
41. Виды задач, подлежащих решению в ходе практических занятий
Физическийобъект
охлаждение
термостабилизация
42. Графический интерфейс системы управления стендом
43. Пример решения задачи охлаждения
44. Стабилизация температуры двухпозиционным методом
45. Стабилизация температуры двухпозиционным методом (динамика процесса)
46. Влияние пропорциональной составляющей ПИД-регулятора на динамику процесса термостабилизации
47. Влияние пропорциональной составляющей ПИД-регулятора на динамику процесса термостабилизации
48.
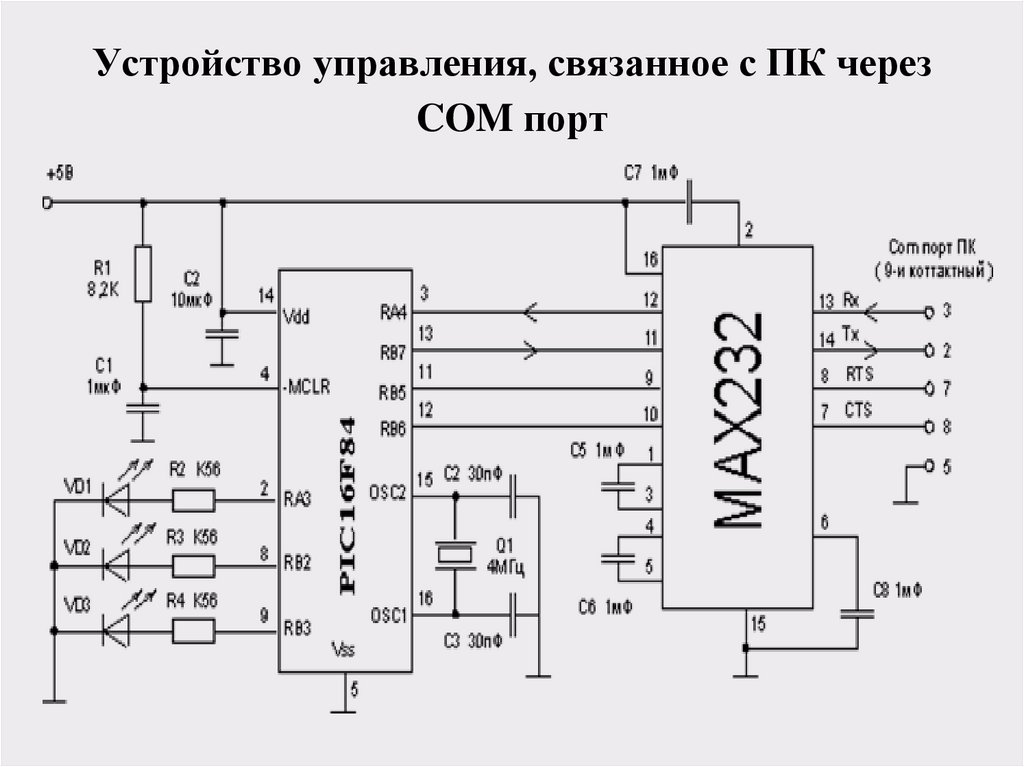
Устройство управления, связанное с ПК черезCOM порт
49.
Схема для просмотра ПЗУ микроконтроллера50.
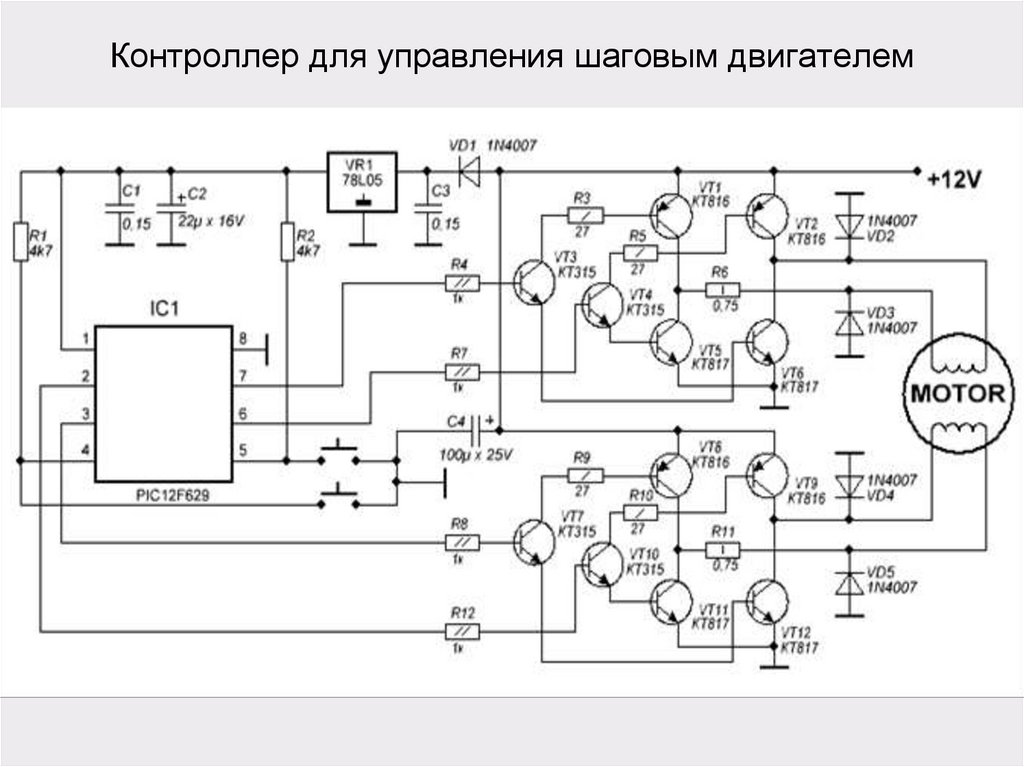
Контроллер для управления шаговым двигателем51.
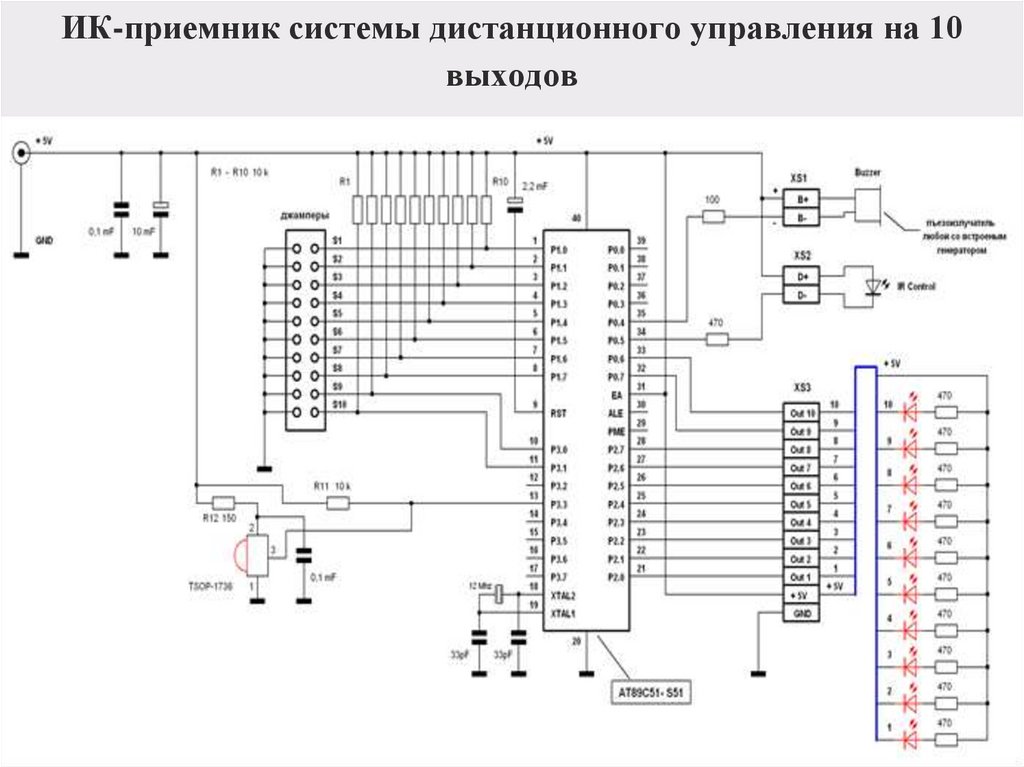
ИК-приемник системы дистанционного управления на 10выходов