





























 geography
geographySimilar presentations:


")
")





")
Оcновы определения места судна в море
1.
принципы определения места судна в море. Навигационные параметры ие принципы определения места судна в море
щих координат места судна на любой момент времени непрерывно ведется счисление
ет вопрос. А достаточно ли одного только счисления пути судна для обеспечения
тся нет, далеко не достаточно.
счисление пути судна основывается на показаниях основных штурманских приборов:
в их работе (их показаниях) имеются погрешности, которые при счислении пути судн
указателя – ΔК, для лага – ΔЛ%), но ведь и сами эти поправки известны (определены) с
ешностями.
ит и угол дрейфа (α), выбираемый из таблицы, а сведения о течениях, элементы кото
бий, являются весьма приближенными (см. табл. 12.1).
тей основных элементов счисления
)
Элементы счисления
Компасный курс по гирокомпасу (ГКК)
Компасный курс по магнитному компасу (ККмк)
Поправка гирокомпаса (ΔГК)
Поправка магнитного компаса (ΔМК)
Значение по
±0,3
±0,9
±0,3
±0,5
2.
*а счислением пути судна осуществляется постоянной про
ти учета элементов счисления (погрешности не исключаю
стить больших промахов в счислении пути судна позволя
счисления включает в себя периодическое определение
рением величин, не участвующих в счислении пути, с по
м координат судна от определенного по этим величинам
зывают обсервованным местом судна, а координаты тако
ными координатами (φ0, λ0).
сть коррекции счисления – определения места судна – должна бы
нии времени между определениями места погрешность счислен
в данных условиях определенной (допустимой) величины и обесп
ую безопасность плавания.
ие действия по определению координат места судна называю
ной обсервацией.
3.
*еличин, характеризующих место судна в море и его перемещение в задан
ываются навигационными параметрами (НП).
ционного параметра, снятое со шкалы измерительного прибора, называют из
параметром.
игационный параметр, исправленный всеми необходимыми поправками, назы
(исправленным) навигационным параметром.
дна определяется по визуальным пеленгам на береговые навигационные ори
омощью пеленгатора направление на этот ориентир – измеренный навигацио
нг (КП). Исправив значение компасного пеленга (КП) поправкой курсоуказате
ируется курс на пеленгаторный репитер, получаем значение исправленного н
ть – истинный пеленг (ИП).
ИП = КП + ΔК
(12.1)
удна определяется по двум горизонтальным углам трех навигационных ориен
ное) значение горизонтального угла – измеренный навигационный параметр
нятый со шкал навигационного секстана. Исправив значение отсчета секстана
секстана (i + S) получим уже значение исправленного навигационного парам
ие горизонтального угла (α).
4.
*ти от характера навигационного параметра (значение пеленга на
сстояния до ориентира, значение горизонтального угла между ор
ветствующие навигационные изолинии имеют различный вид.
о, каждому значению навигационного параметра соответству
ная изолиния.
некоторые виды навигационных изолиний для малых расстояний
изуальной видимости ориентиров), при которых сферичностью Зе
и считать ее шаром.
1. Навигационная изолиния при измерении расстояний (изостадия)
Навигационная изолиния расстояния (рис. 1
представляет собой окружность с радиусом,
расстоянию от места судна до навигационно
(до которого измерялось расстояние D). Цен
окружности – место ориентира (т. О). То ест
5.
изопеленЛиния пеленга на пут
навигационной карте
от того, откуда он из
на ориентир или с ор
судно) изображается
(рис. 12.3), в каждой
угол между меридиа
кратчайшим направл
ориентир, есть велич
(ИП). То есть судно в
измерения навигацио
параметра – пеленга
может находиться то
линии, но в любой ег
т. А или в т. В или в т
значение пеленга в л
линии пеленга (изопе
одинаковым.
6.
При измерении горизонталмежду двумя ориентирами
навигационной изолинией б
изогона – окружность, кото
проходит через эти ориент
вмещает измеренный и исп
горизонтальный угол α (рис
есть, судно в момент измер
навигационного параметра
находиться в любой точке (
или в т. В или в т. С) на нав
изолинии – изогоне, так как
угла α в любой ее точке бу
то же ( ОАД = ОВД = ОСД =
7.
*.то фактическое место судна всегда находится на навигационной изолини
етствующего ей навигационного параметра и становится вполне очевидным т
та судна одной навигационной изолинии недостаточно, а значит:
я места судна необходимо иметь не менее двух пересекающихся навигац
м угол их пересечения должен быть более 30° (лучший вариант – 90°).
ые изолинии получают одновременным (или почти одновременным) измерени
нных параметров.
бсервованного места на путевой навигационной карте вместо построения нави
полнительно к ней) используют линию положения – прямую, заменяющую у
изолинии вблизи счислимого места судна.
естве линии положения используется отрезок прямой линии, касательной к н
, расположенной на кратчайшем расстоянии от счислимого места судна (рис.
Линии положения используются для получения н
обсервованного места при плавании судна в откр
когда навигационные ориентиры находятся на бо
удалениях от судна и навигационные изолинии и
на путевой навигационной карте сложными крив
8.
*нные параметры, по которым определяется место судна, измерены од
ромежутки времени и приведены к одному моменту, то полученное по
зывают обсервованным (
).
ционные параметры измерялись разновременно и при значительном п
у моментами их измерений, то полученное по их значениям место судн
рвованным (
).
считать такие промежутки времени, при которых погрешности счисле
шностей навигационных изолиний и практически не будут сказываться
места. Для большинства навигационных способов определения места
равными не более 20 минут.
ия места судна навигационные изолинии, соответствующие разноврем
параметрам должны быть приведены к одному моменту (месту). Э
рафическим или аналитическим способом.
При графическом способе
навигационная изолиния «
9.
** Исключение погрешностей в счислении пути судна достигается путем
систематического контроля за счислением его координат и
периодической их коррекцией.
* Коррекция счисления пути включает в себя периодическое определение
координат судна измерением величин, не участвующих в счислении его
пути.
* Сущность определения места судна состоит в том, что по значениям
измеренных и исправленных навигационных параметров
прокладываются на путевой навигационной карте соответствующие им
навигационные изолинии, в точке пересечения которых находится
обсервованное место судна на момент измерения навигационных
параметров.
* Невязкой счисления называется расхождение одномоментных
счислимых и обсервованных координат судна.
* Навигационные изолинии, дающие обсервованное место судна, должны
быть приведены к одному месту (моменту).
10.
ление места судна по визуальным пеленгам на береговые ориентиориентир (пеленг) измеряется на судне с помощью визуальных и оптических пе
станций.
ех этих приборов измеряются компасные пеленги (КП), так как все они с
ирокомпас, гироазимут, магнитный компас и др.), которые имеют свои поправки (ΔГК
меренные с судна направления на ориентиры должны исправляться поправкой курсо
вки):
итер пеленгатора поступает от магнитного компаса – ΔМК;
итер пеленгатора поступает от гирокомпаса – ΔГК;
итер пеленгатора поступает от гироазимута – ΔГА.
сляция курса на его репитеры идет именно от гирокомпаса.
В результате исправления компасного напра
того курсоуказателя, от которого идет трансл
репитеры пеленгаторов, мы получаем значен
или истинного направления (пеленга) с судн
На морской навигационной карте меркаторск
измеренный компасный пеленг, исправленны
курсоуказателя, прокладывается как прямая
пеленга – изопеленга – прямая линия) для не
11.
12.
*13.
Рис. 7.2. Оформление графического счислениясудна на путевой карте
14.
15.
*итного компаса.
й из точки якорной стоянки линией истинного курса (линией пути) делается
е обозначение компасного курса (ГКК, ККГЛ, ККП);
е компасного курса, заданное рулевому (знак равенства между КК и 127,0° п
на и знак принятой поправки курсоуказателя указывается в скобках.
нией курса позволяет контролировать:
удержания заданного курса (127,0°) рулевым;
нятой и учитываемой поправки курсоуказателя (+2,0°);
проведения направления линии истинного курса на карте (129,0°).
судна по заданному курсу рулевой регулярно (через каждые 15 минут) сверя
ному курсоуказателю (по ГК или по ГА или др.) и по магнитному компасу с до
ному помощнику капитана).
рдинаты судна записываются в судовой журнал:
а с якоря (бочки) и при постановке на якорь (бочку);
16.
арте все условные обозначения делаются в соответствии с «Условным, применяемыми в судовождении».
надписи и линии выполняются на навигационной карте только просты
ричем:
водимых линий должна соответствовать толщине нанесенных на карту
ен быть таким, чтобы после стирания линий и надписей на карте не ос
ые надписи не должны затемнять (накладываться) на графическое изо
и цифр должна быть в 1,5÷2 раза больше высоты цифр, обозначающих
3 мм (но не > 5 мм).
ку начала счисления принимается место судна на якоре (бочке, у прич
о наблюдениям береговых ориентиров или по счислению (рис. 7.2).
17.
*ия погрешностей, возникающих от неодновременного пеленгован
льших скоростях судна, первыми следует измерять пеленги н
оложены ближе всего к диаметральной плоскости судна (пеле
к пеленг на ориентиры близкие к траверзу судна) – рис. 13.4.
13.1.2. Определение места по пеленгам н
ость пеленгования
Рис. 13.5. Определение места су
на два ориентир
ения места по двум пеленгам аналогична методике определения места судна по п
18.
*13.1.3. Определение места судна способом «крюйс-пелен
мости судна имеется только один навигационный ориентир, который нанесен на путевую
ть место судна можно по разновременным наблюдениям одного и того же навигационного
способом «крюйс-пеленг».
7. Способ «крюйс-пеленг»
ния места судна таким способом необходимо (рис. 13.7):
ь компасный пеленг на навигационный ориентир А (КП1), записать время (Т1) и отсчет
На это время (Т1) нанести на путевую карту счислимое место судна (т. а).
19.
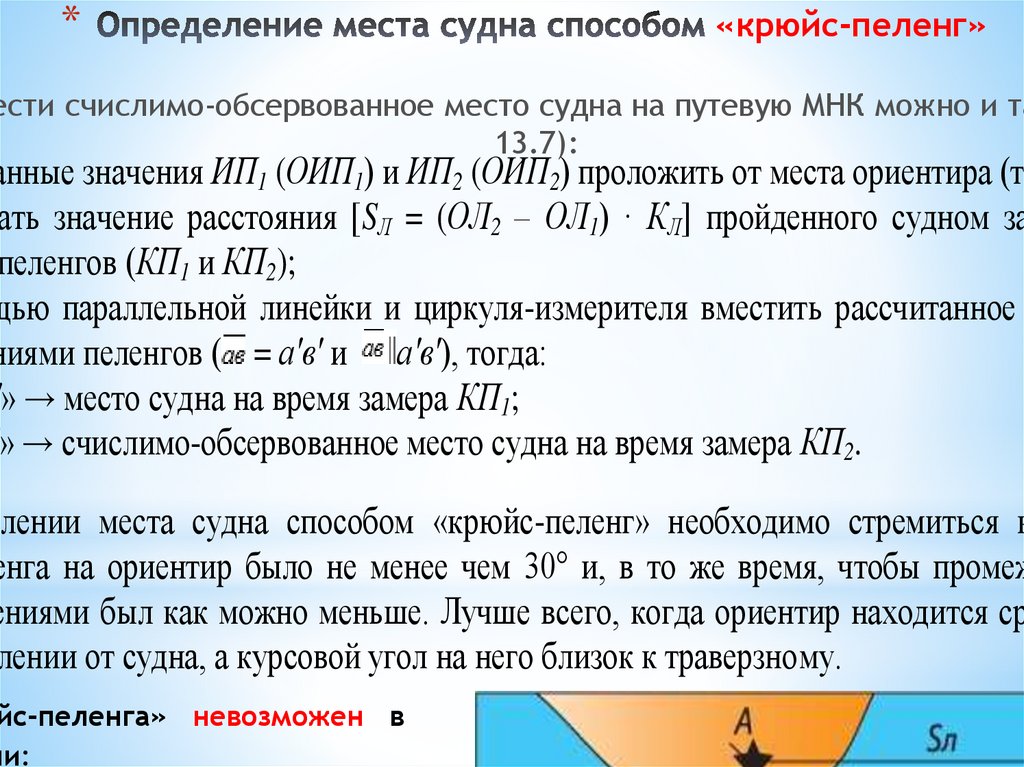
*«крюйс-пеленг»
ести счислимо-обсервованное место судна на путевую МНК можно и та
13.7):
анные значения ИП1 (ОИП1) и ИП2 (ОИП2) проложить от места ориентира (т.
тать значение расстояния [SЛ = (ОЛ2 – ОЛ1) · КЛ] пройденного судном за
пеленгов (КП1 и КП2);
щью параллельной линейки и циркуля-измерителя вместить рассчитанное
ниями пеленгов ( = а′в′ и а′в′), тогда:
′» → место судна на время замера КП1;
′» → счислимо-обсервованное место судна на время замера КП2.
елении места судна способом «крюйс-пеленг» необходимо стремиться к
енга на ориентир было не менее чем 30° и, в то же время, чтобы промеж
ениями был как можно меньше. Лучше всего, когда ориентир находится ср
лении от судна, а курсовой угол на него близок к траверзному.
йс-пеленга» невозможен в
ли:
20.
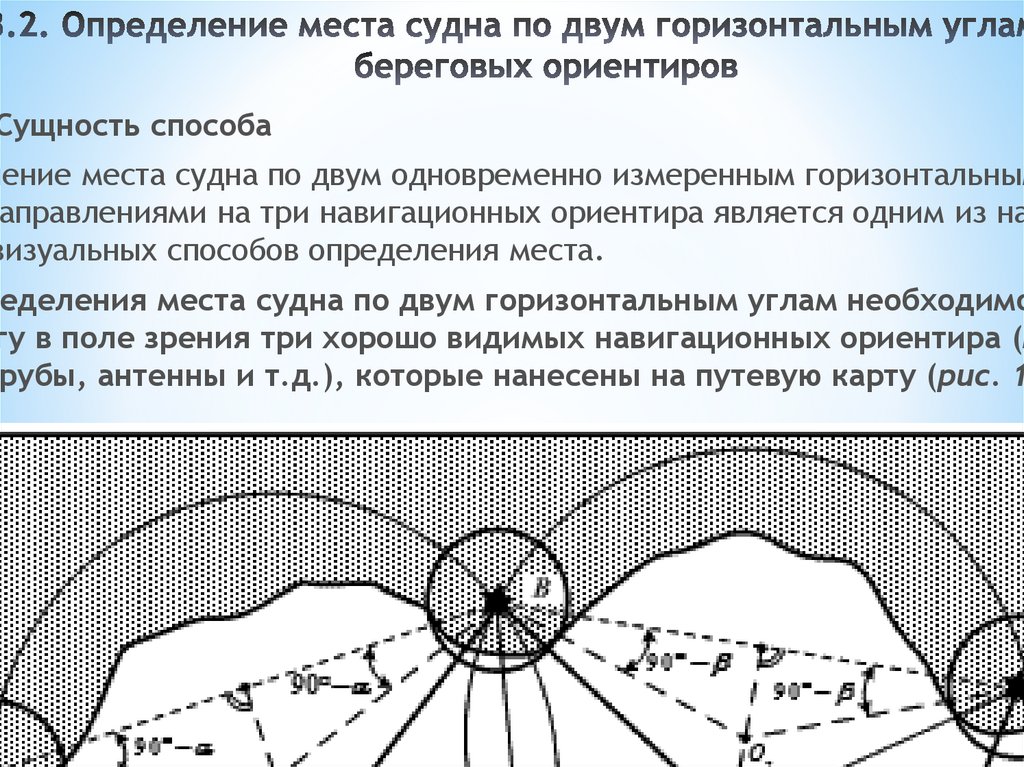
Сущность способаление места судна по двум одновременно измеренным горизонтальным
направлениями на три навигационных ориентира является одним из на
визуальных способов определения места.
ределения места судна по двум горизонтальным углам необходимо
гу в поле зрения три хорошо видимых навигационных ориентира (м
трубы, антенны и т.д.), которые нанесены на путевую карту (рис. 1
21.
зации данного способа:удне одновременно измеряются два горизонтальных угла между ориентирами:
ориентирами А и В;
ориентирами В и С.
е углов производится с помощью навигационного секстана. Величина измеренного с помощью
ью до 0,1′) есть отсчет секстана (ОС).
еты секстана, соответствующие измеренным углам ( α′ → ОС1; β′ → ОС2), исправляются поправ
е i – поправка индекса секстана (определяется наблюдателем); S – инструментальная поправка с
ся из формуляра СНО по значению ОС1 и ОС2).
еренные и исправленные общей поправкой секстана (i + S) углы ( α = ОС1 + (i + S) и β = ОС2 + (i
навигационными параметрами, которым соответствует навигационная изолиния в виде окружн
ответствует окружность, проходящая через ориентиры А и В и вмещающая угол α = АDВ. В
я угла α – судно должно находиться на этой окружности.
ответствует окружность, проходящая через ориентиры В и С и вмещающая угол β = ВЕС. В
я угла судно должно находиться и на этой окружности.
енное нахождение судна на двух окружностях возможно лишь в их общей точке, то есть в
о, эта точка «К» является общей вершиной измеренных углов, а сами углы при этом имеют одну
оторая проходит через средний ориентир В.
22.
* Секстан навигационный измерительныйинструмент
23.
*ние обсервованного места судна
ю карту с помощью протрактора .
Протра
прокла
предн
получе
судна
между
(маяка
тор (pro – перед, tractor – тянущий) – специальный навигационный прибор, пр
можно построить два угла с общей вершиной в центре протрактора.
ор состоит из азимутального круга, разбитого на градусы от 0° до 180° вправ
неек. Средняя линейка прикреплена к азимутальному кругу и неподвижна; кр
падает с делением азимутального круга 0°.
24.
чаях, когда при определении места судна по двум горизонтальным углам по каким-лим отсутствует протрактор, применяется лист кальки (рис. 13.10), посредине которого
ся произвольная прямая линия (КВ), которая принимается за общую сторону измеренн
β. При этой точке (т. К), с помощью штурманского транспортира, строятся измеренны
нные углы α и β ( α = АКВ, β = ВКС). [Точка К на линии КВ берется произвольно,
внизу и посередине листа кальки].
25.
чения обсервованного места судна на путевую карту таким способомимо (рис. 13.8 и рис. 13.11):
26.
*определении места судна по двум горизонтальным углам может быть с
котором обсервованное место получить на путевой карте невозможно.
пределенный случай будет тогда и только тогда, когда судно находи
ужности, проходящей через все три навигационных ориентира (А,
ду которыми измерялись горизонтальные углы α и β (рис. 13.12).
ичие случая неопределенности требует предварительной проверки
можности определения места судна по двум горизонтальным углам.
ирают такие навигационные ориентиры, взаимное расположение котор
лючает случай неопределенности, то есть через них нельзя провести
ужность, а это может быть в следующих случаях:
се три береговых ориентира расположены на одной прямой линии
зко к ней (рис. 13.13);
редний навигационный ориентир должен находиться ближе к судн
крайних (рис. 13.14).
27.
редства и способы определения расстояний до видимых ориентироия до видимых ориентиров в море определяются как визуальными методами так и с
их средств (НРЛС).
ным методам можно отнести:
ние расстояния до ориентира с помощью дальномера;
ние (расчет) расстояния до ориентира по измеренному вертикальному углу данного
а;
ление расстояния глазомерно.
Определение расстояний с помощью дальномеров
меры представляют собой оптические приборы, измеряющие расстояние до видимого
а на основе различных принципов.
тально-базисные дальномеры автоматически решают треугольник по известному
ию (база прибора) и противолежащему углу, измеряемому оптическим устройством.
скопические дальномеры основаны на свойстве человеческого глаза различать глуби
28.
а задача может быть решена двумя путями (рис. 14.3):змерением вертикального угла между вершиной ориентира и
ованием ( β′) или
мерением вертикального угла между вершиной ориентира и урезом во
реговой черты ( β1′).
29.
*Определение места судна по двум расстояниям до ориентиров,
нных по их вертикальным углам
ь навигационный секстан к наблюдениям: выполнить его выверки и определить поправ
ля определения места два ориентира (видимы визуально, нанесены на карту, разнесе
а угол > 30° < 150°).
ным секстаном измерить вертикальные углы этих ориентиров (первым измерять угол
который ближе к траверзу). На момент измерения угла второго ориентира заметить вр
(ОЛ). [С навигационного секстана: ОС1 (ОС2) – отсчет секстана при измерении угла пер
иентира].
истинные значения вертикальных углов ориентиров
+ S) + Δβd′;
+ S) + Δβd′
где
S – инструментальная поправка секстана (из формуляра по ОС1(2));
Δβd′ – поправка за наклонение видимого горизонта. Так как
рефракция для основания и вершины предмета будет примерно одина
поэтому ее можно не учитывать при DУ < De.
30.
способ является наиболее удобным и точным.еренному расстоянию до какого-либо ориентира соответствует
гационная изолиния – окружность с центром в точке ориентира, до
рого измерялось расстояние и радиусом, равным истинному значению
тояния.
получения обсервованного места достаточно одновременно (почти
временно) измерить расстояния до трех ориентиров. Точка пересечен
гационных изолиний – окружностей (их дуг) радиусами D1, D2 и D3 – да
обсервованное место судна.
31.
удна (на экране навигационной РЛС) имеются только два ориентира, до которых возмо судна определяется по расстояниям до 2-х ориентиров.
32.
*«крюйс-расстояние»
удовождения может встретиться и такой случай, когда с судна наблюдается
а возможности взять на него пеленг нет (туман, неисправен курсоуказатель и
ае можно получить счислимо-обсервованное место судна, использовав спо
рис. 14.8.
ет курсом КК 88,0° (+2,0°).
счислению в точке
, измерили расстояние до ориентира (мыс Игольный
м курсом некоторое расстояние S, достаточное для изменения направле
ол не менее 30°, (т. Т2) повторно измерили расстояние до того же ори
тив время (Т2) и отсчет лага (ОЛ2).
сервованное место судна в этом случае найдем, если выполним гео
утевой карте:
ра (т. А) проведем вспомогательную линию параллельную курсу судна (л
(от т. А) пройденное судном расстояние S за время между измерениями расс
Л или Sоб = Vоб · t);
проведем окружность (ее дугу) радиусом, равным истинному расстоянию д
где DР1 – первое измеренное расстояние с РЛС;
проведем окружность (ее дугу) радиусом, равным истинному расстоянию д
где DР2 – второе измеренное расстояние с РЛС.
33.
*пределения места судна относится к комбинированным .
ыми называются такие способы определения места, в которых измеряются различные навигаци
ир и расстояние до него;
ир А и горизонтальный угол между ориентирами А и Б;
ир и глубина места и др.
олее часто употребляемый на практике способ определения места судна по пеленгу на ори
его.
пособа состоит в том, что для его реализации используется всего лишь один ориентир, а навига
ля пеленга и окружность для расстояния – пересекаются под оптимальным углом 90°.
пособ применяется в тех случаях, когда в поле зрения наблюдается лишь один ориентир, а на
онная РЛС (НРЛС).
Методика практического выполнения способа (рис. 14.9).
последовательности (с помощью НРЛС) измерить направление на ориентир (РЛП) и
(дистанцию) до него. Зафиксировать время (Т) и отсчет лага (ОЛ).
34.
сстояния до ориентира по измерению его вертикального углаУсловие
и
ОС
i +S
e (м)
Н (м)
0°07,5′
+ 4,3′
6,0
26,0
D
ие места судна по данным РЛС
№ задачи
1
Условие
φc = 44°45,8′N, λc = 37°07,4′E, м.
Анапский: DP = 101 кб. о. Утриш:
DP = 101 кб. ΔDP = – 0,1 мили. С =
Ответ
С = …°–… мил
90° – 1,0 мили