














 geography
geographySimilar presentations:


")
")


")



Определение места судна по трём пеленгам
1. Государственный морской университет морского и речного флота имени адмирала С.О. Макарова Институт МОРСКАЯ АКАДЕМИЯ Кафедра
НавигацииДоцент кафедры Навигации к.п.н., доцент Сличёнок М.Ю.
Тема 4: ОПРЕДЕЛЕНИЕ МЕСТА СУДНА ПО
ВИЗУАЛЬНЫМ ПЕЛЕНГАМ
ЛЕКЦИЯ 4.4
ОПРЕДЕЛЕНИЕ МЕСТА СУДНА ПО ТРЁМ
ПЕЛЕНГАМ
Определение места судна по трём пеленгам. Порядок
выполнения. Причины появления треугольника
погрешностей. «Разгон» треугольника погрешностей.
Оценка точности обсервации.
2. ОПРЕДЕЛЕНИЕ МЕСТА СУДНА ПО ТРЁМ ПЕЛЕНГАМ. ПОРЯДОК ВЫПОЛНЕНИЯ
2Организация
3
1
Т1
ОЛ1
работы и её
содержание при
определении места
по трём компасным
пеленгам
практически не
Т2
отличается от
ОЛ2
Если сторона треугольника не превышает допустимой
определения места
погрешности места (при плавании вблизи берегов 0,1 –
по двум пеленгам.
0,3 мили), считается, что промахи в работе
ОИП3
отсутствуют, и место судна принимается в центре
треугольника.
3.
1Т2
ОЛ2
2
Т1
ОЛ1
3
4.
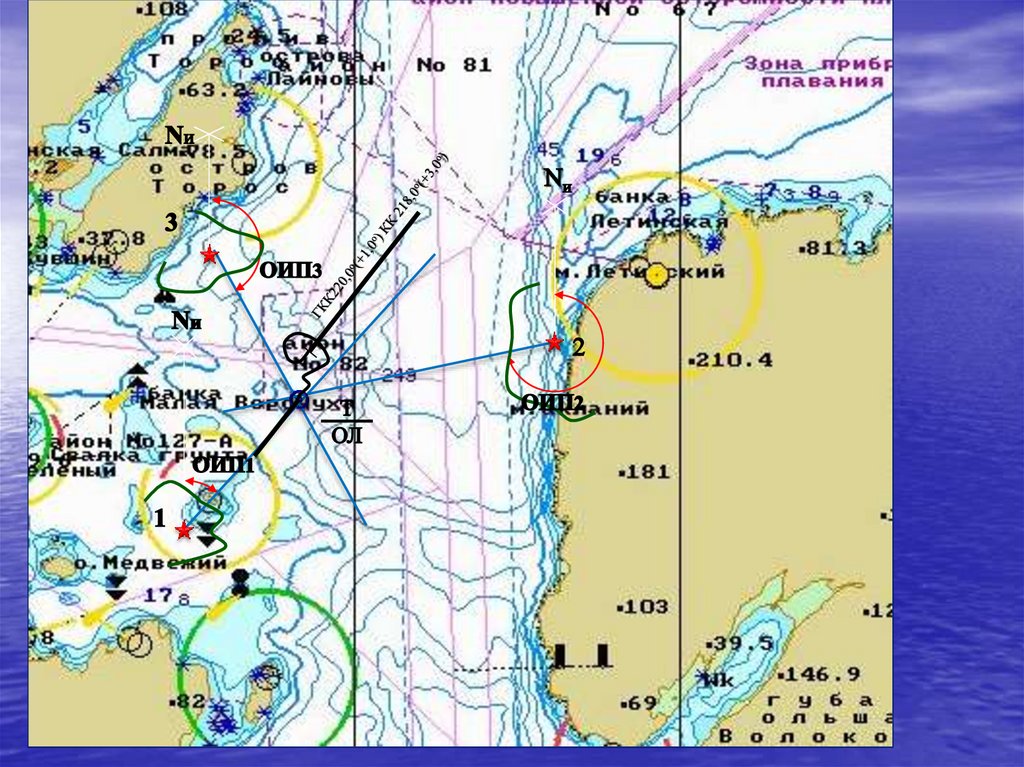
ПОРЯДОК ДЕЙСТВИЙ ПРИ ОПРЕДЕЛЕНИИ МЕСТАСУДНА ПО ТРЁМ КОМПАСНЫМ ПЕЛЕНГАМ
- Подобрать ориентиры
(угол пересечения
пеленгов должен быть не
менее 30°) и опознать
ориентиры на местности;
Nи
Nи
2
ОИП3
Nи
ОИП2
2
Т
ОЛ
ОИП1
1
- Измерить компасные
пеленга на ориентиры, в
момент измерения
последнего зафиксировать
время (Т) и отсчет лага
(ОЛ);
- Исправить измеренные компасные пеленга:
ИП = КП + ΔГК
и проложить на карте линии обратных истинных пеленгов от
ориентиров до их пересечения;
5.
NиNи
ОИП3
1
3
Nи
ОИП2
Т
ОЛ
1
1
ОИП1
- Рассчитать счислимое место судна на
момент Т/ОЛ, снять направление и
величину невязки, сделать запись в
судовой журнал.
6.
7.
ПРИЧИНЫ ПОЯВЛЕНИЯ ТРЕУГОЛЬНИКАПОГРЕШНОСТЕЙ
- Ошибки в опознании ориентиров на местности;
- Промахи в измерении, обработке и прокладке пеленгов;
- Погрешности, обусловленные неодновременностью пеленгования;
- Погрешности в учитываемой поправке курсоуказателя.
8.
ДЛЯ УСТАНОВЛЕНИЯ ПРИЧИН ПОЯВЛЕНИЯТРЕУГОЛЬНИКА НЕОБХОДИМО:
ПОВТОРИТЬ ПЕЛЕНГОВАНИЕ, обратив особое внимание на точность
опознания
ориентиров,
измерения
и
обработки
навигационных
параметров и прокладки изолиний.
Если при повторном определении места ПОЛУЧЕНА ФИГУРА
МЕНЬШИХ РАЗМЕРОВ, ТО ПРИЧИНОЙ ЯВЛЯЕТСЯ НЕТОЧНОСТЬ
В РАБОТЕ ШТУРМАНА.
Если величина ФИГУРЫ ПОГРЕШНОСТЕЙ
ИЗМЕНЕНИЙ,
ТО
ПРИЧИНОЙ
ЯВЛЯЕТСЯ
ПОПРАВКА СИСТЕМЫ КУРСОУКАЗАНИЯ.
ОСТАЛАСЬ БЕЗ
НЕУЧТЕННАЯ
9.
«РАЗГОН» ТРЕУГОЛЬНИКА ПОГРЕШНОСТЕЙb
a
При определении места
получен
сравнительно
большого
треугольника
1
c
погрешностей авс.
2
3
10.
Послеполучения
сравнительно
большого
a
треугольника
погрешностей
карте
авс
на
b′
1
a′
прокладываются
истинные
b
c′
c
пеленги
измененные на одну и ту
же
произвольную
величину
(2-4˚),
результате
появится
треугольник а'b'с';
2-4°
в
2
3
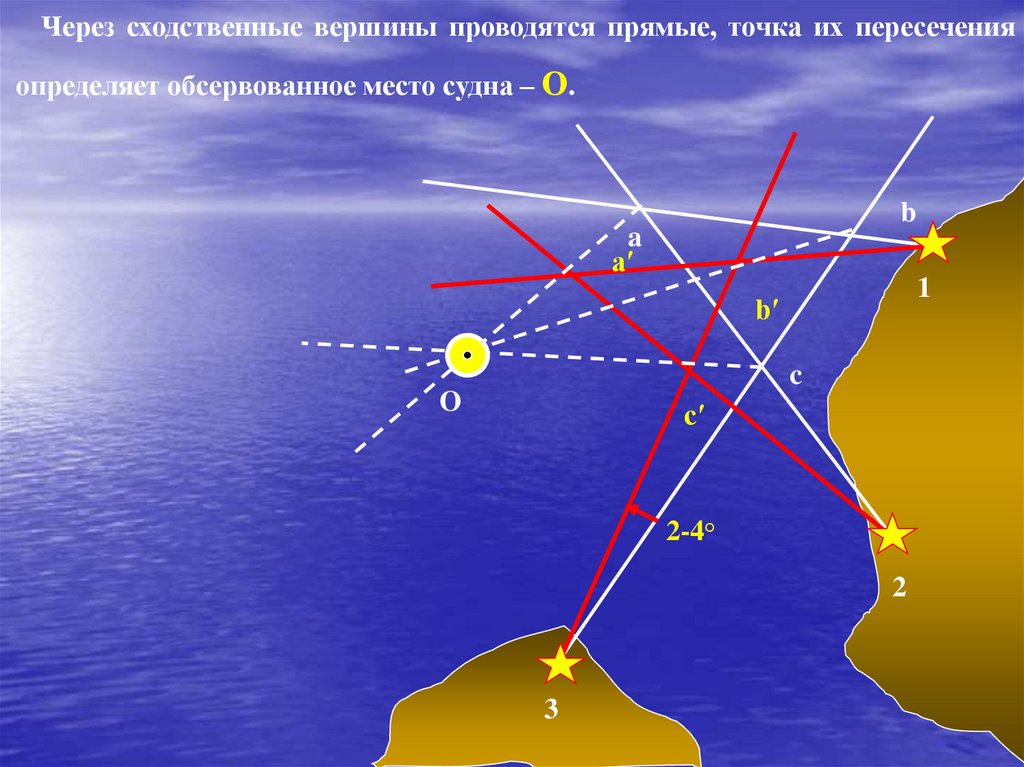
11.
Через сходственные вершины проводятся прямые, точка их пересеченияопределяет обсервованное место судна – О.
b
a
a′
1
b′
c
O
c′
2-4°
2
3
12.
ba
a′
b′
Для уточнения ΔК,
на карте из точки О
измерить ИПi на ориентиры
1
ИП1
c
O
c′
ИП3
и рассчитать ΔК:
2-4°
ΔКi = ИПi – КПi;
ИП2
2
ΔК = 1/3· (ΔК1+ ΔК2 + ΔК3).
3
13.
ДОСТОИНСТВА СПОСОБА:− простота и оперативность определения места;
− высокая точность и надёжность способа;
НЕДОСТАТКИ СПОСОБА:
− зависимость от условий видимости;
− зависимость точности определения места от дистанции до ориентиров.
14.
ОЦЕНКА ТОЧНОСТИ ОБСЕРВОВАННОГО МЕСТАПО ПЕЛЕНГАМ НА ТРИ ОРИЕНТИРА
Точность обсервованного места может оцениваться приближенной формулой:
где mлп(ср) среднее значение СКП линий положения
Θср – среднее квадратическое из острых углов треугольника погрешностей
ρ° - количество градусов в одном радиане
15.
Если все углы треугольника острые, то θср = 60° и формула приобретает вид:Мо = 1,16m лп(ср) ≈ 1,2 m лп(ср)
Если один внутренний угол треугольника тупой, то
θср = (θ1 + θ2)
где θ1, θ2 – острые углы треугольника.
При средних условиях точность определения места потрём пеленгам
оценивается М0 = 1-3 кбт.
Наиболее надежный контроль правильности опознания ориентиров и
Отсутствия грубых ошибок определения места достигается сопоставлением
этих мест со и обсервациями по другим ориентирам и другими способами.
16.
Мо3n = 0.7 Мо2nСПОСОБ ОПРЕДЕЛЕНИЯ МЕСТА СУДНА ПО ВИЗУАЛЬНЫМ
ПЕЛЕНГАМ НА ТРИ БЕРЕГОВЫЕ ОРИЕНТИРА ЯВЛЯЕТСЯ
ОСНОВНЫМ В ПРИБРЕЖНОМ ПЛАВАНИИ В УСЛОВИЯХ
ХОРОШЕЙ ВИДИМОСТИ.