













 informatics
informatics geography
geographySimilar presentations:







")


Радиолокационная прокладка
1.
Радиолокационная прокладкаГлавное, что интересует судоводителя при
обнаружении объекта на экране радиолокатора −
насколько опасна наблюдаемая цель.
Радиолокационное наблюдение включает:
1. систематическое наблюдение за обстановкой и
обнаруженными объектами с обязательным
просмотром теневых секторов и периодическим
наблюдением на шкалах дальнего обзора;
2. глазомерную оценку радиолокационной ситуации,
опасности столкновения и отбор объектов для
радиолокационной прокладки;
3. радиолокационную прокладку (ручную или с
помощью автоматизированных средств) с
определением элементов сближения и движения
опасных объектов и выполнение расчётов маневра
расхождения;
4. контроль за изменением радиолокационной
ситуации во время маневра до полного расхождения
судов на безопасном расстоянии.
Владивосток - 2013
2.
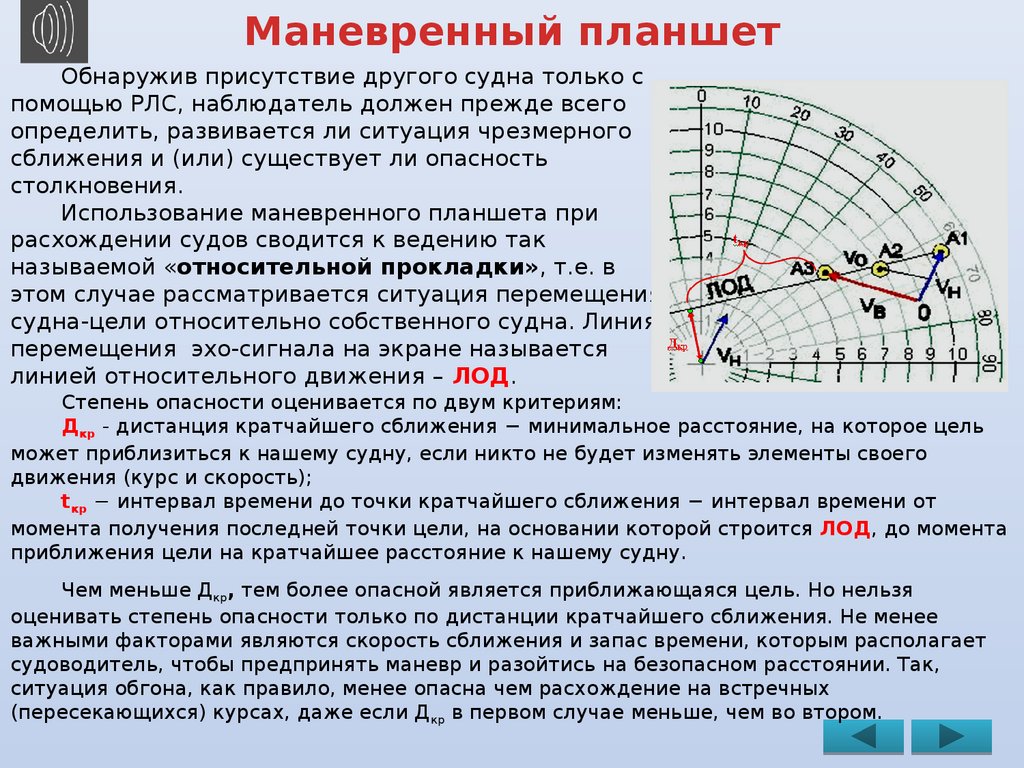
Маневренный планшетОбнаружив присутствие другого судна только с
помощью РЛС, наблюдатель должен прежде всего
определить, развивается ли ситуация чрезмерного
сближения и (или) существует ли опасность
столкновения.
Использование маневренного планшета при
расхождении судов сводится к ведению так
называемой «относительной прокладки», т.е. в
этом случае рассматривается ситуация перемещения
судна-цели относительно собственного судна. Линия
перемещения эхо-сигнала на экране называется
линией относительного движения – ЛОД.
Степень опасности оценивается по двум критериям:
Дкр - дистанция кратчайшего сближения − минимальное расстояние, на которое цель
может приблизиться к нашему судну, если никто не будет изменять элементы своего
движения (курс и скорость);
tкр − интервал времени до точки кратчайшего сближения − интервал времени от
момента получения последней точки цели, на основании которой строится ЛОД, до момента
приближения цели на кратчайшее расстояние к нашему судну.
Чем меньше Дкр, тем более опасной является приближающаяся цель. Но нельзя
оценивать степень опасности только по дистанции кратчайшего сближения. Не менее
важными факторами являются скорость сближения и запас времени, которым располагает
судоводитель, чтобы предпринять маневр и разойтись на безопасном расстоянии. Так,
ситуация обгона, как правило, менее опасна чем расхождение на встречных
(пересекающихся) курсах, даже если Дкр в первом случае меньше, чем во втором.
3.
Маневренный планшетПостроение треугольника скоростей
1.В центре планшета
наносится вектор
скорости нашего
судна. Длина
вектора равна 1/10
величины скорости
судна (6-ти минутный
вектор). Например,
если Vн = 15 узлов,
то откладываем
отрезок, равный 1,5
мили. Направление
вектора совпадает с
курсом нашего
судна.
4.
Маневренный планшетПостроение треугольника скоростей
А1
2. При помощи РЛС
делаются замеры
пеленга и дистанции
встречного судна. В
таблицу
записываются
результаты
измерений.
На планшете по
пеленгу и дистанции
наносится первая
точка – А1 (П1=30º,
Д1=10 миль).
5.
Маневренный планшетПостроение треугольника скоростей
А1
3. В точку А1
параллельно самому
себе переносится и
«втыкается» вектор
скорости нашего
судна.
6.
Маневренный планшетПостроение треугольника скоростей
4. Через 3 минуты
наносится вторая
точка - А2.
А1
А2
Vн
Vв
ЛОД
Соединив А1 и А2,
получаем ЛОД.
Определяется опасность
ситуации сближения.
Рассчитываются
истинные курс и
скорость цели. Для чего:
вектор нашего судна
делится пополам;
из полученной точки
проводится вектор во
точку А2;
переносим вектор в
центр планшета, где
получаем истинный курс
цели;
для определения
скорости необходимо
величину вектора
умножить на 2, т.к.
измерения были
сделаны через 3-х
минутный отрезок.
7.
Маневренный планшетПостроение треугольника скоростей
А1
А2
А3
Vн
Vв
ЛОД
Vв
5. Еще через 3 минуты
наносится третья
точка - А3.
Соединив точки А1
– А2 – А3, получаем
окончательный ЛОД.
Уточняем истинные
курс и скорость цели,
для чего из начала
нашего вектора строим
вектор Vв, который
переносим в центр
планшета (при определении
скорости не надо умножать на
2).
8.
Маневренный планшетПостроение треугольника скоростей
А1
А2
А3
Vв
Vн
tкр
Vв
Д
кр
ЛОД
6. Перпендикуляр,
проведенный из
центра планшета к
ЛОД, определяет Дкр.
Величину tкр
находим, откладывая
по ЛОД 6-ти минутные
отрезки, равные
расстоянию А1 – А3,
до Дкр.
Принимается
решение по выбору
маневра
расхождения.
9.
Маневренный планшетМаневр расхождения курсом
А1
А3
У
1. Необходимо на ЛОД
нанести
упреждающую точку
«У» - положение цели
к моменту окончания
нашего маневра.
Обычно это
6−минутный интервал
(расстояние А1 – А3).
10.
Маневренный планшетМаневр расхождения курсом
А1
А3
У
ОЛОД
2. Из точки «У»
проводим
касательную к
окружности,
величина которой
соответствует
заданной
безопасной
дистанции
расхождения (здесь
2 мили). Эта линия
называется
ожидаемая линия
относительного
движения – ОЛОД.
Так как согласно
Правила 19 МППСС при
обнаружении судна
впереди траверза
рекомендуется отворот
только вправо, то и
ОЛОД должен
измениться вправо.
11.
Маневренный планшетМаневр расхождения курсом
А1
А3
У
ОЛОД
3. Полученную
прямую ожидаемой
линии
относительного
движения ОЛОД
переносим
параллельно самой
себе в точку А3.
12.
Маневренный планшетМаневр расхождения курсом
4. Первоначальный вектор нашего
судна Vс при помощи циркуля
разворачиваем до тех пор, пока
он не пересечется с ОЛОД,
проведенной через А3.
А1
Vc Vн
5. Полученный вектор
Vн переносим в центр
А3
планшета и
определяем новый
курс нашего судна,
который необходим
для расхождения с
У
целью на расстоянии
в 2 мили.
ОЛОД
Vн
Маневр по изменению
курса необходимо
завершить до точки У с
учетом маневренных
характеристик вашего
судна.
После выполнения
маневра – обязательно вновь
определить курс и скорость
цели, т.е. снова построить
треугольник скоростей.
13.
Маневренный планшетМаневр расхождения курсом
А1
А3
У
tвозвр
Vн
6. Момент возвращения к
прежним элементам
движения
определяется точкой
пересечения старого
ЛОД, перенесенного к
2-х мильной зоне, и
нового фактического
ЛОД, полученного
после выполнения
маневра.
Радиолокационное
наблюдение за целью
ведется до тех пор, пока
она не будет пройдена и
окончательно оставлена
позади (примерно 4 – 5 миль
по корме).
14.
Маневренный планшетПроверка маневра курсом на другом судне
В1
А1
Vн
А3
В3
УВ
УА
ОЛОД-А
ОЛОД-В
Vн
ЛОД-В
ЛОД-А
1. Перенести новый
вектор скорости
нашего судна в
начало старого
вектора судна В.
2. Соединить конец
нового вектора
скорости Vн с 3-ей
точкой.
3. Перенести
полученную линию
в упреждающую
точку – У судна В.
4. Эта линия – ОЛОД
судна В после
изменения курса
нашего судна на
новый,
рассчитанный для
расхождения с
судном А.
15.
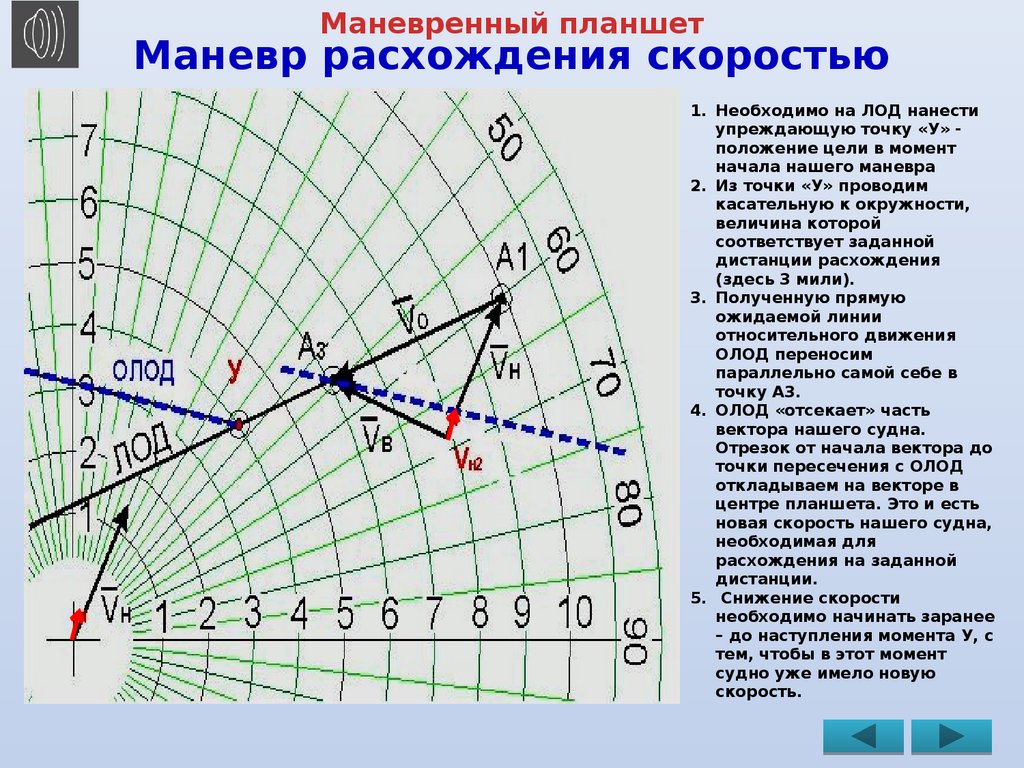
Маневренный планшетМаневр расхождения скоростью
1. Необходимо на ЛОД нанести
упреждающую точку «У» положение цели в момент
начала нашего маневра
2. Из точки «У» проводим
касательную к окружности,
величина которой
соответствует заданной
дистанции расхождения
(здесь 3 мили).
3. Полученную прямую
ожидаемой линии
относительного движения
ОЛОД переносим
параллельно самой себе в
точку А3.
4. ОЛОД «отсекает» часть
вектора нашего судна.
Отрезок от начала вектора до
точки пересечения с ОЛОД
откладываем на векторе в
центре планшета. Это и есть
новая скорость нашего судна,
необходимая для
расхождения на заданной
дистанции.
5. Снижение скорости
необходимо начинать заранее
– до наступления момента У, с
тем, чтобы в этот момент
судно уже имело новую
скорость.
16.
Маневренный планшетОбразец радиолокационной прокладки
17.
Глазомерная оценка радиолокационной ситуацииГлазомерную оценку опасности столкновения можно использовать
только тогда, когда судоводитель понимает принцип построения
треугольника скоростей, т. е. имеет достаточный навык работы на
маневренном планшете.
340
350
330
000
010
020
2
320
030
3
310
300
040
050
1
070
280
Relative
6 minute
vector
080
270
090
260
100
250
110
4
240
120
230
130
140
220
N up
судно 1
пересекает
курс по носу;
судно 2 –
сателлит;
судно 3
пересекает
курс по корме;
судно 4 –
обгоняющее.
060
290
Range 6
(1)NM
210
150
200
160
190
180
170
18.
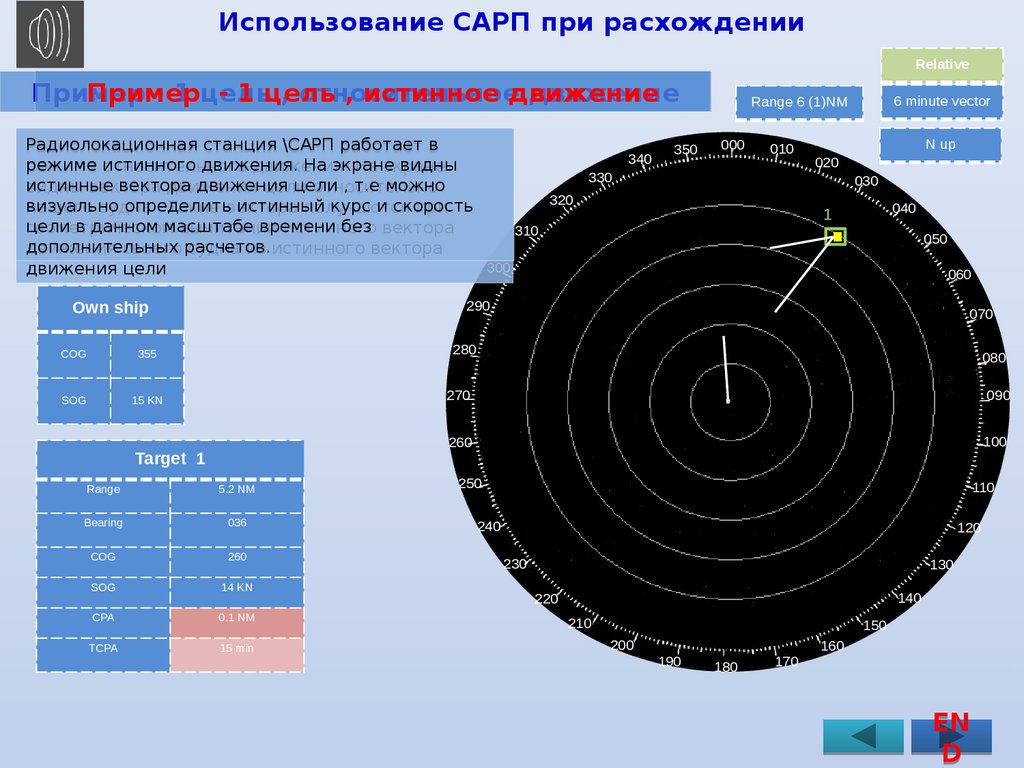
Использование САРП при расхожденииRelative
True
Пример
- 1 цель
, истинное движение
Пример
- 1 цель
, относительное
движение
Радиолокационная станция \САРП работает в
340
режиме истинного
движения.
На экране
видны
относительного
движения.
На экране
330
истинные
вектора
движения
цели
, т.е можно
видны вектора
движения
цели
относительно
320
визуально
определить
истинный
курс и скорость
нашего судна
. Такие вектора
получаются
при
цели
в данном масштабе
времени
без вектора
геометрическом
вычитании
истинного
310
дополнительных
движения своего расчетов.
судна из истинного вектора
300
движения цели
Own ship
COG
355
SOG
15 KN
350
6 minute vector
Range 6 (1)NM
000
010
N up
020
030
040
1
050
060
290
070
280
Target 1
Range
5.2 NM
Bearing
036
COG
260
SOG
14 KN
CPA
0.1 NM
TCPA
15 min
080
270
090
260
100
250
110
240
120
230
130
140
220
210
150
200
160
190
180
170
EN
D