
Similar presentations:
")









К лаб №3
1.
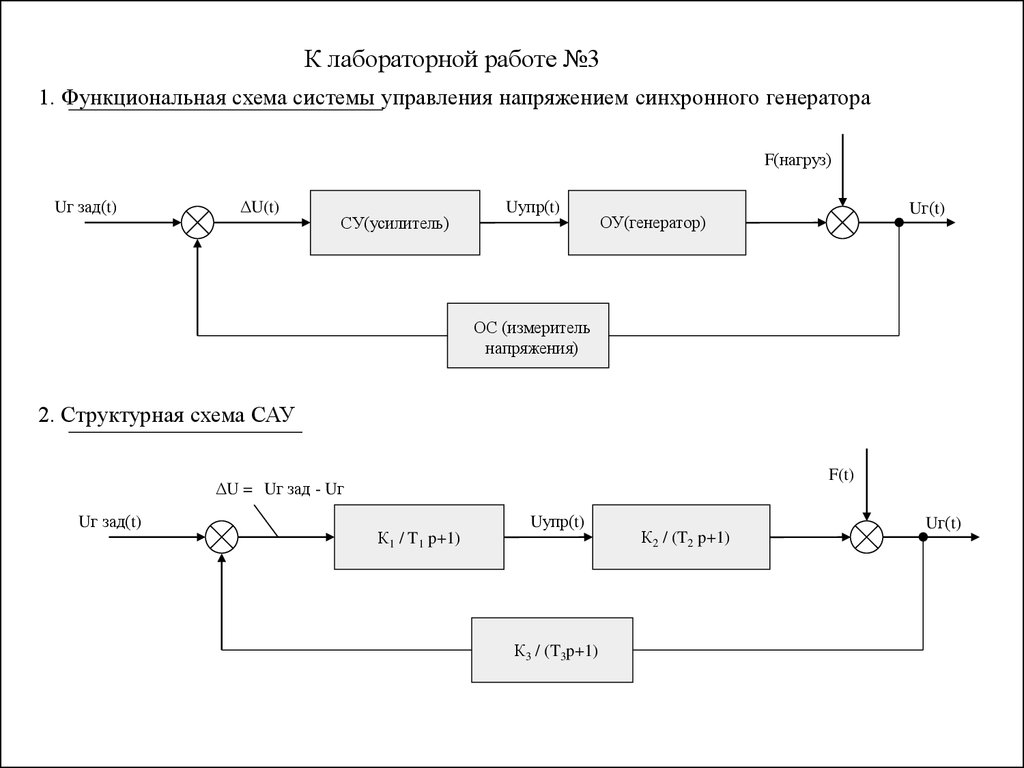
К лабораторной работе №31. Функциональная схема системы управления напряжением синхронного генератора
F(нагруз)
Uг зад(t)
ΔU(t)
СУ(усилитель)
Uупр(t)
Uг(t)
ОУ(генератор)
ОС (измеритель
напряжения)
2. Структурная схема САУ
F(t)
ΔU = Uг зад - Uг
Uг зад(t)
К1 / T1 p+1)
Uупр(t)
К3 / (T3p+1)
К2 / (T2 p+1)
Uг(t)
2.
uгW uг з (p)
3. Расчет передаточной функции
uг
W uг з (p) = Uг(р) / Uгз(р) (при этом считаем, что F(t) = 0)
uг
W uг з (p) = Wпц(р) / 1+ Wпц(р) Wос(р) =
К1 К 2
Т1 р 1 Т 2 р 1
=
К1 К 2 К 3
1
Т1 р 1 Т 2 р 1 Т 3 р 1
К К Т р 1
= Т Т Т р 3 (Т Т Т Т Т Т 1 ) р2 2 3 (Т Т Т ) р 1 К К К
1 2 3
1 2
1 3
2 3
1
2
3
1
2
3
4. Расчет передаточной функции
uг
W F (p),
в предположении, что Uг з(t) = 0
uг
W F (p) = Uг(р) / F(p)
Для расчета перестраиваем структурную схему так, чтобы входом был сигнал F(t),
а выходом Uг(t).
F(t)
Uг(t)
К2 / (T2 p+1)
К1 / T1 p+1)
К3 / (T3p+1)
3.
uгW F (p) =
Тогда:
=
1
=
К1 К 2 К 3
1
Т1 р 1 Т 2 р 1 Т 3 р 1
Т1Т 2Т 3 р 3 (Т1Т 2 Т1Т 3 Т 2Т 3 ) р 2 (Т1 Т 2 Т 3 ) р 1
Т1Т 2Т 3 р 3 (Т1Т 2 Т1Т 3 Т 2Т 3 ) р 2 (Т1 Т 2 Т 3 ) р 1 К1 К 2 К 3
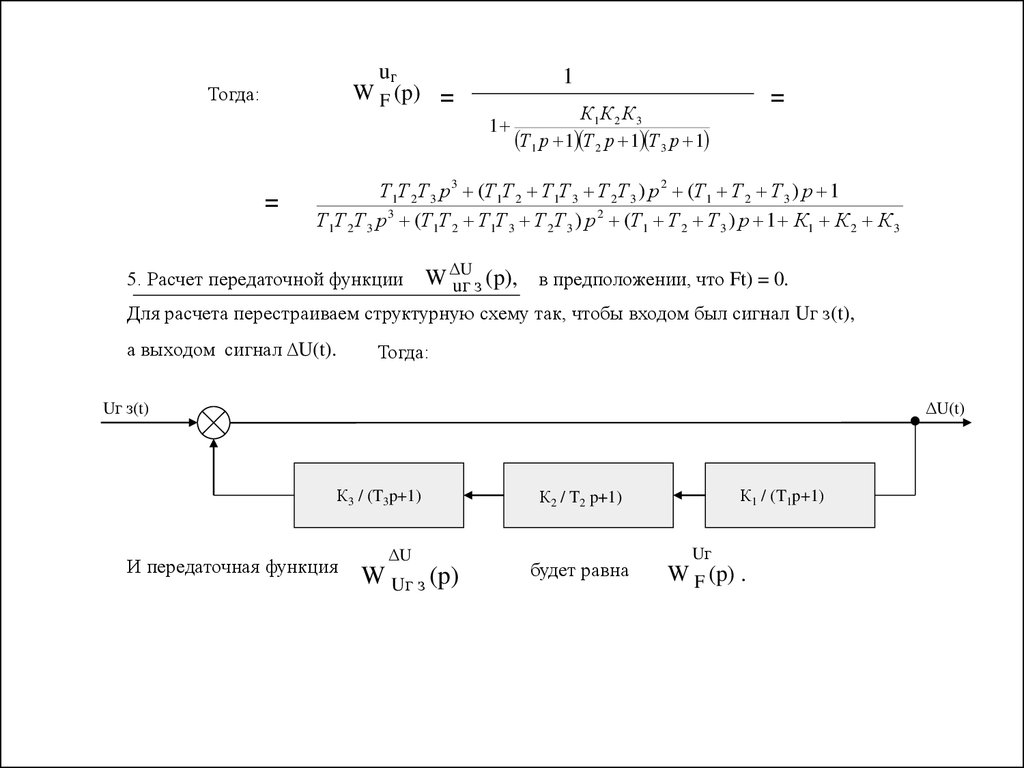
5. Расчет передаточной функции
W ΔU
uг з (p), в предположении, что Ft) = 0.
Для расчета перестраиваем структурную схему так, чтобы входом был сигнал Uг з(t),
а выходом сигнал ΔU(t).
Тогда:
Uг з(t)
ΔU(t)
К3 / (T3p+1)
И передаточная функция
ΔU
W Uг з (p)
К1 / (T1p+1)
К2 / T2 p+1)
будет равна
Uг
W F (p) .
4.
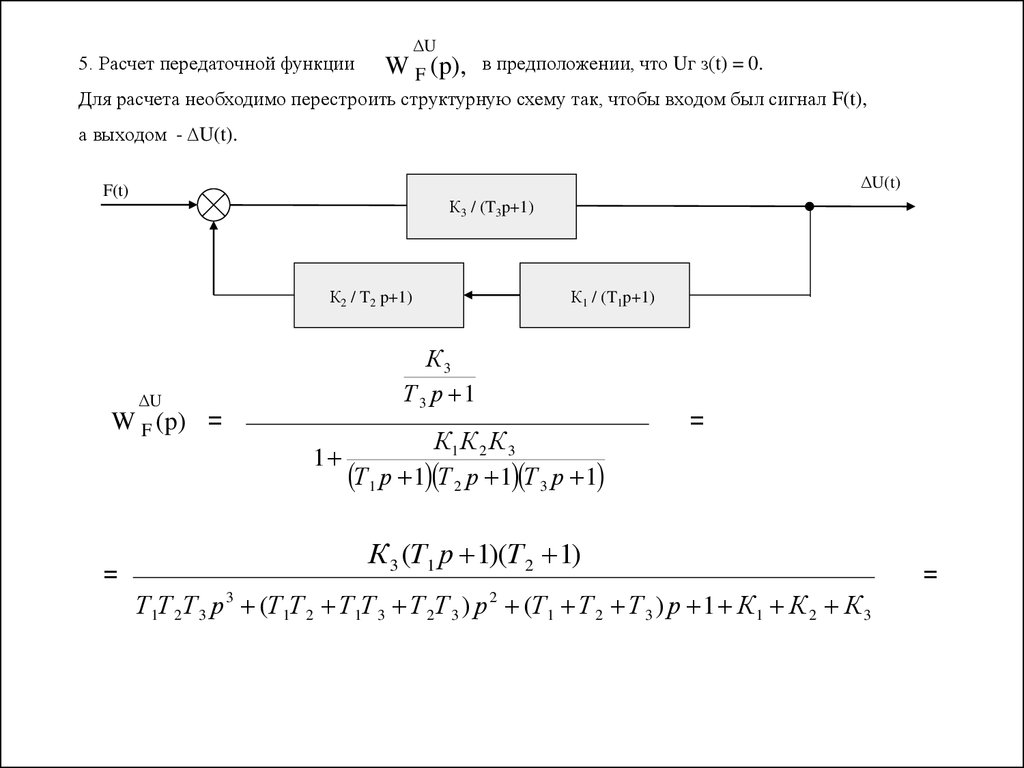
5. Расчет передаточной функцииΔU
W F (p),
в предположении, что Uг з(t) = 0.
Для расчета необходимо перестроить структурную схему так, чтобы входом был сигнал F(t),
а выходом - ΔU(t).
ΔU(t)
F(t)
К3 / (T3p+1)
К2 / T2 p+1)
К3
Т3 р 1
ΔU
W F (p) =
=
К1 / (T1p+1)
К1 К 2 К 3
1
Т1 р 1 Т 2 р 1 Т 3 р 1
=
К 3 (Т1 р 1)(Т 2 1)
Т1Т 2Т 3 р (Т1Т 2 Т1Т 3 Т 2Т 3 ) р (Т1 Т 2 Т 3 ) р 1 К1 К 2 К 3
3
2
=
5.
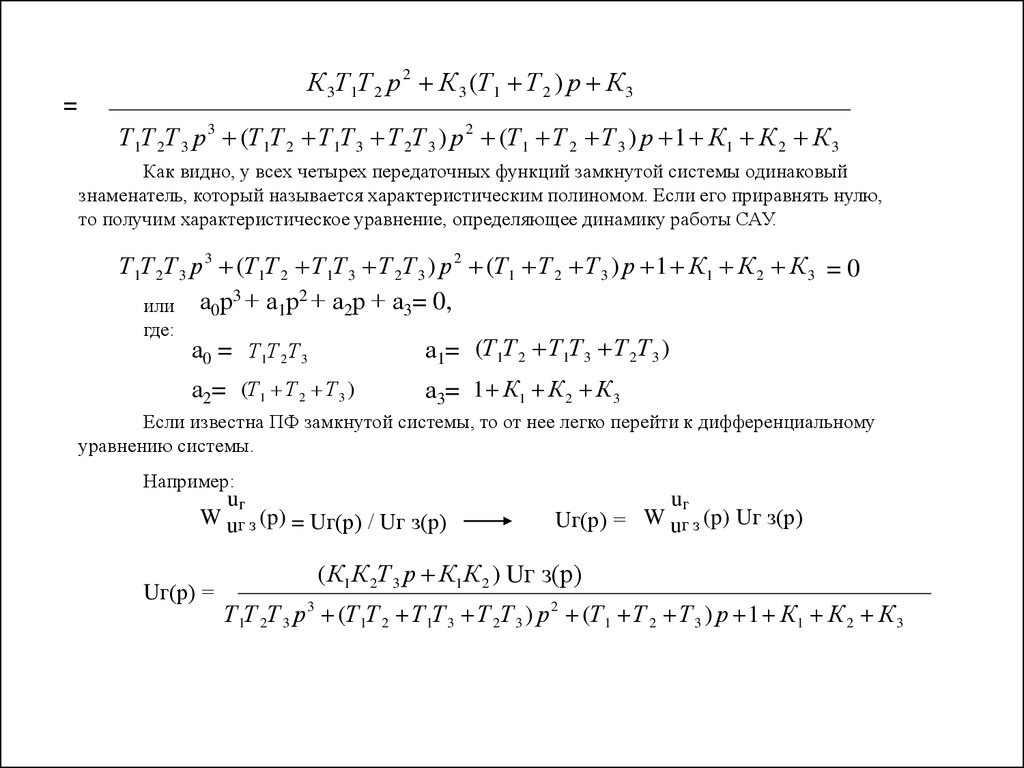
=К 3Т 1Т 2 р 2 К 3 (Т 1 Т 2 ) р К 3
Т1Т 2Т 3 р 3 (Т1Т 2 Т1Т 3 Т 2Т 3 ) р 2 (Т1 Т 2 Т 3 ) р 1 К1 К 2 К 3
Как видно, у всех четырех передаточных функций замкнутой системы одинаковый
знаменатель, который называется характеристическим полиномом. Если его приравнять нулю,
то получим характеристическое уравнение, определяющее динамику работы САУ.
Т1Т 2Т 3 р 3 (Т1Т 2 Т1Т 3 Т 2Т 3 ) р 2 (Т1 Т 2 Т 3 ) р 1 К1 К 2 К 3 = 0
3
2
или а0р + а1р + а2р + а3= 0,
где:
а0 = Т1Т 2Т 3
а1= (Т1Т 2 Т1Т 3 Т 2Т 3 )
а2= (Т1 Т 2 Т 3 )
а3= 1 К1 К 2 К 3
Если известна ПФ замкнутой системы, то от нее легко перейти к дифференциальному
уравнению системы.
Например:
uг
W uг з (p) = Uг(р) / Uг з(р)
Uг(р) =
uг
Uг(р) = W uг з (p) Uг з(р)
( К1 К 2Т 3 р К1 К 2 ) Uг з(р)
Т1Т 2Т 3 р 3 (Т1Т 2 Т1Т 3 Т 2Т 3 ) р 2 (Т1 Т 2 Т 3 ) р 1 К1 К 2 К 3
6.
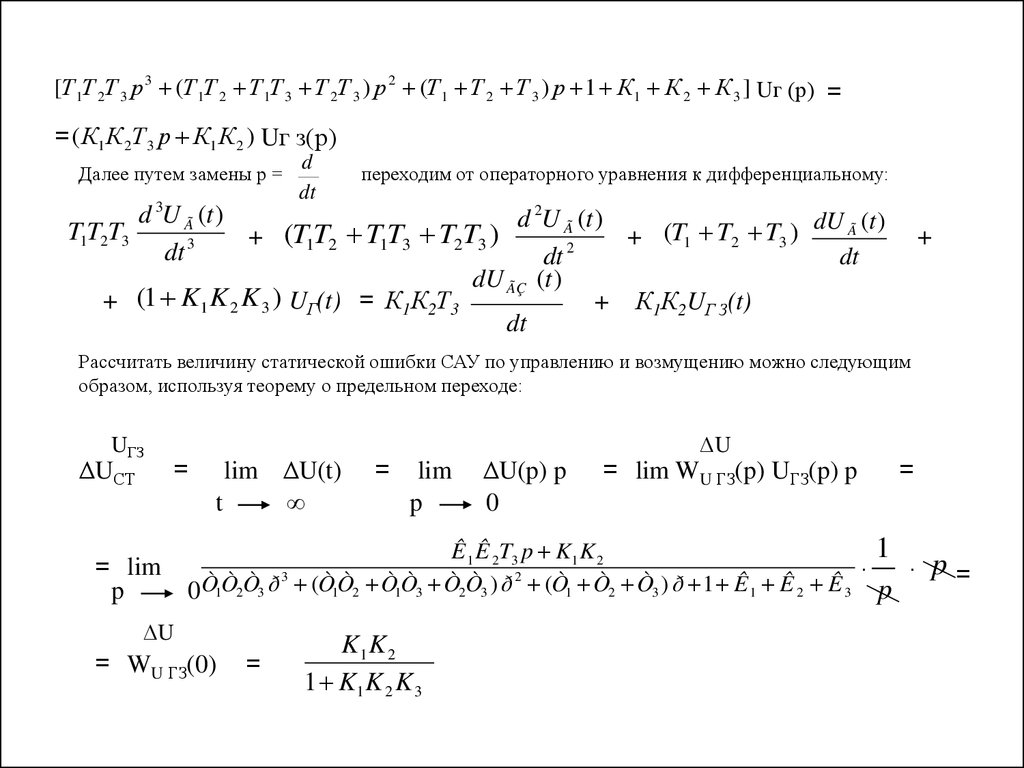
[Т1Т 2Т 3 р 3 (Т1Т 2 Т1Т 3 Т 2Т 3 ) р 2 (Т1 Т 2 Т 3 ) р 1 К1 К 2 К 3 ] Uг (р) == ( К1 К 2Т 3 р К1 К 2 ) Uг з(р)
Далее путем замены р =
d
dt
переходим от операторного уравнения к дифференциальному:
2
d 3U Ã (t )
d
U Ã (t )
dU Ã (t )
T1T2T3
(
T
T
T
)
(
T
T
T
T
T
T
)
+
+
1
2
3
3
1 2
1 3
2 3
dt
dt 2
dt
dU ÃÇ (t )
(
1
K
K
K
)
+
+ К1К2UГ З(t)
1 2 3 UГ(t) = К1К2Т3
dt
+
Рассчитать величину статической ошибки САУ по управлению и возмущению можно следующим
образом, используя теорему о предельном переходе:
UГЗ
ΔUСТ
=
= lim
p
lim ΔU(t)
t
∞
=
lim
p
ΔU(p) p
0
ΔU
= lim WU ГЗ(p) UГЗ(p) p
Ê 1 Ê 2T3 p K1 K 2
.
3
2
Ò
Ò
Ò
ð
(
Ò
Ò
Ò
Ò
Ò
Ò
)
ð
(
Ò
Ò
Ò
)
ð
1
Ê
Ê
Ê
1 2
1 3
2 3
1
2
3
1
2
3
0 1 2 3
ΔU
= WU ГЗ(0)
=
K1 K 2
1 K1 K 2 K 3
=
1 .
p=
p