


 electronics
electronicsSimilar presentations:










Автоматизированный электропривод рольганга толстолистового цеха
1. Автоматизированный электропривод рольганга толстолистового цеха филиала №12 ЗАО «Внешторгсервис»
Магистерская работаВыполнил Жернов Н.С.
Руководитель Столяров В.Н.
Алчевск 2019
2.
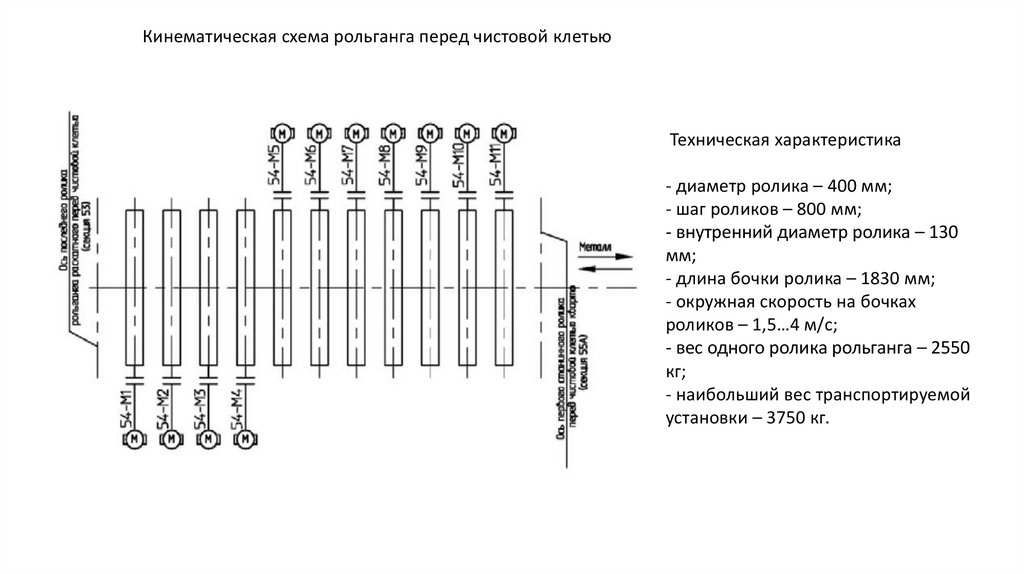
Кинематическая схема рольганга перед чистовой клетьюТехническая характеристика
- диаметр ролика – 400 мм;
- шаг роликов – 800 мм;
- внутренний диаметр ролика – 130
мм;
- длина бочки ролика – 1830 мм;
- окружная скорость на бочках
роликов – 1,5…4 м/с;
- вес одного ролика рольганга – 2550
кг;
- наибольший вес транспортируемой
установки – 3750 кг.
3.
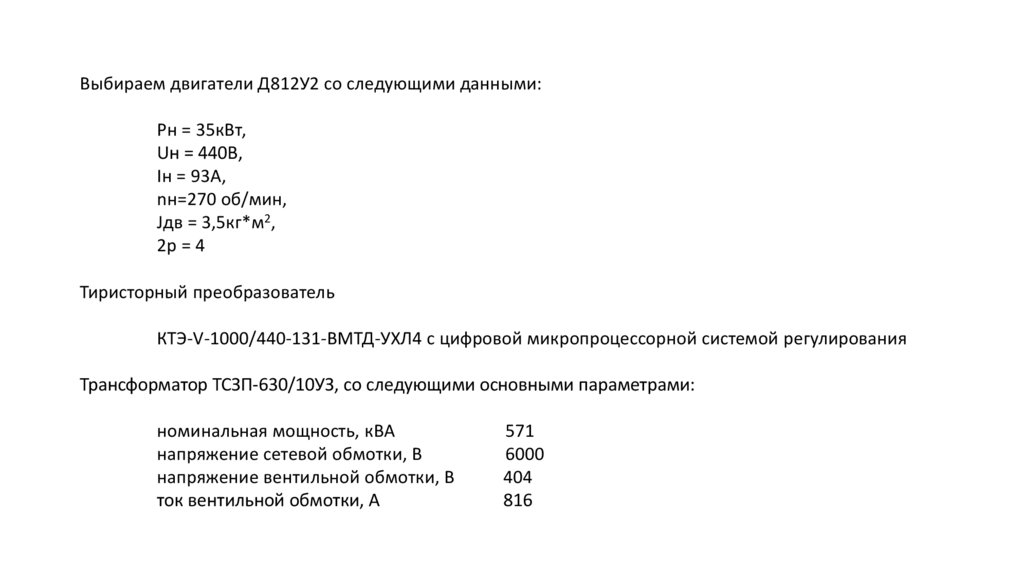
Выбираем двигатели Д812У2 со следующими данными:Рн = 35кВт,
Uн = 440В,
Iн = 93А,
nн=270 об/мин,
Jдв = 3,5кг*м2,
2р = 4
Тиристорный преобразователь
КТЭ-V-1000/440-131-ВМТД-УХЛ4 с цифровой микропроцессорной системой регулирования
Трансформатор ТСЗП-630/10УЗ, со следующими основными параметрами:
номинальная мощность, кВА
напряжение сетевой обмотки, В
напряжение вентильной обмотки, В
ток вентильной обмотки, А
571
6000
404
816
4.
Принципиальная схема силовой части системы электропривода5.
СФU
ЗИС
EП
UРC
UЗИС
КРС
UОС
WРТ(p)
КТП
ТТПр 1
EД
Rэ
Тм СФр
1/ Rэ
Тэ р 1
IC
UОТ
КТ
КС
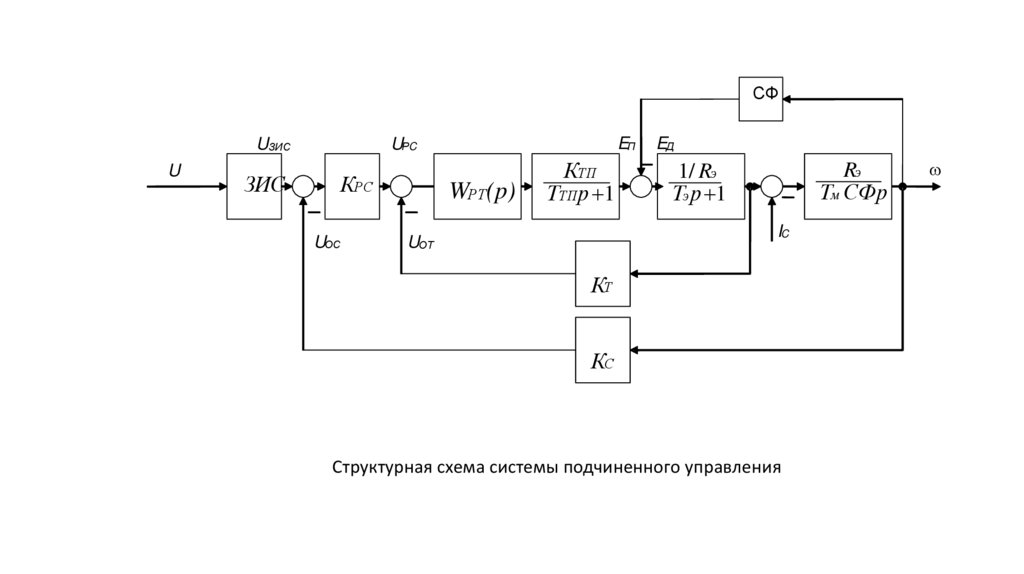
Структурная схема системы подчиненного управления
6.
~6 кВQ1
~220в
Q3
TM1
LF4
SIFC-1
ЗИС
Uзс
Uзис
t
РС P
РТ PI
UZ
6
SIFC-2
t
t
6
-1
Q2
n
n
RS
BA
ADC
RP
BR
M1
...
LM1 ...
M11
LM11
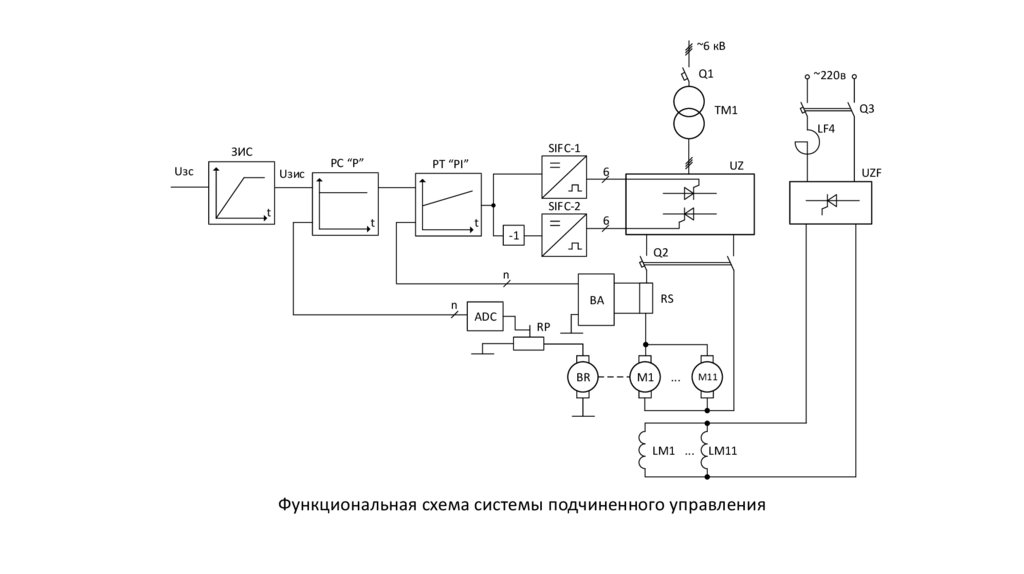
Функциональная схема системы подчиненного управления
UZF
7.
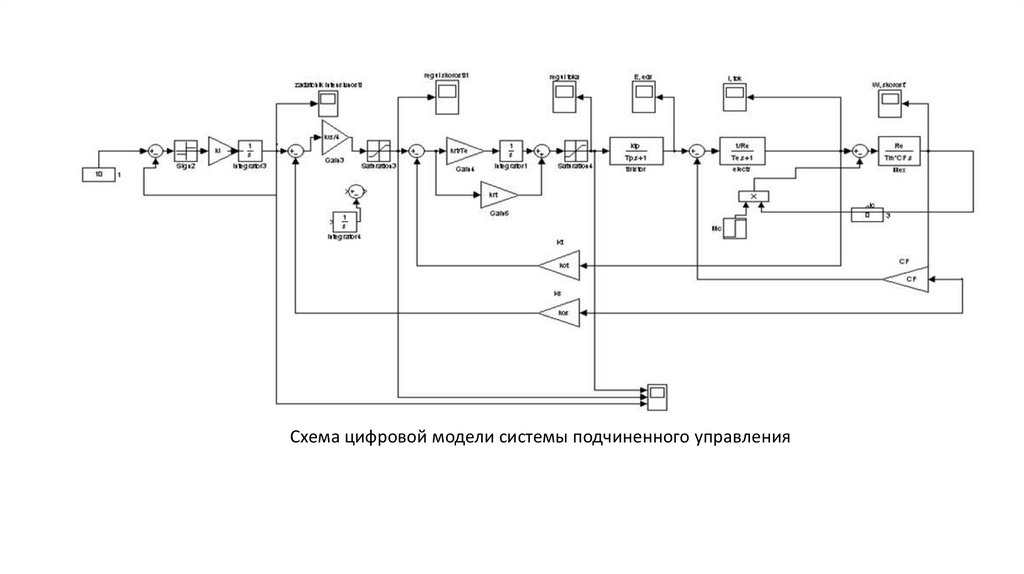
Схема цифровой модели системы подчиненного управления8.
cФUРС
Uз
Kзи
p
Uзис
UРТ
EП
KТП
TПP+1
1/RЭ
TЭP+1
I
RЭ
TМcФP
IC
1
IМ
1
М
K p
P
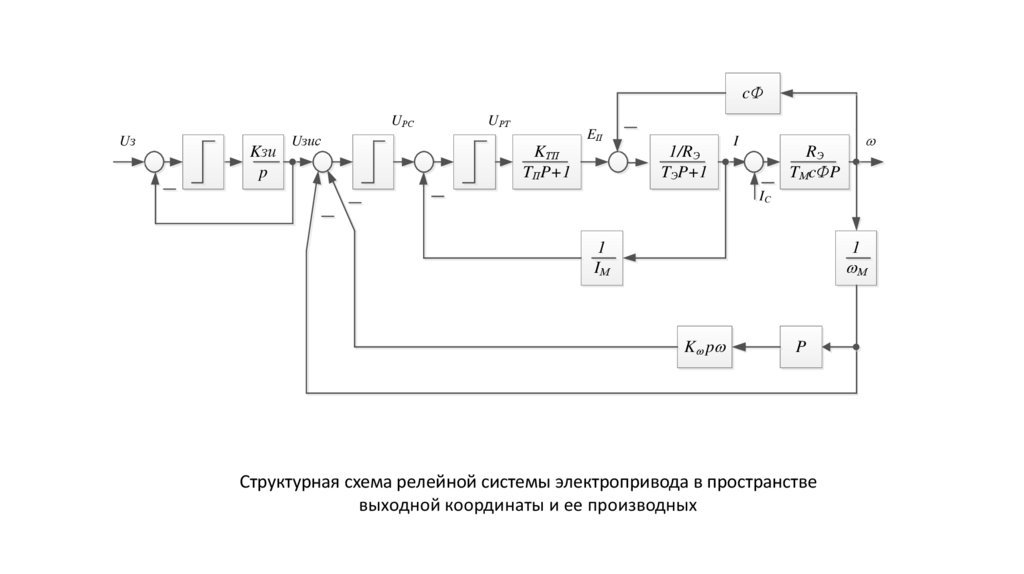
Структурная схема релейной системы электропривода в пространстве
выходной координаты и ее производных
9.
~6 кВQ1
~220в
Q3
TM1
LF4
SIFC-1
ЗИС
Uзс
РС
Uзис
РТ
UZ
6
SIFC-2
t
6
-1
Q2
K i
d/dt
RS
BA
RP
BR
М1
...
LM1 ...
M11
LM11
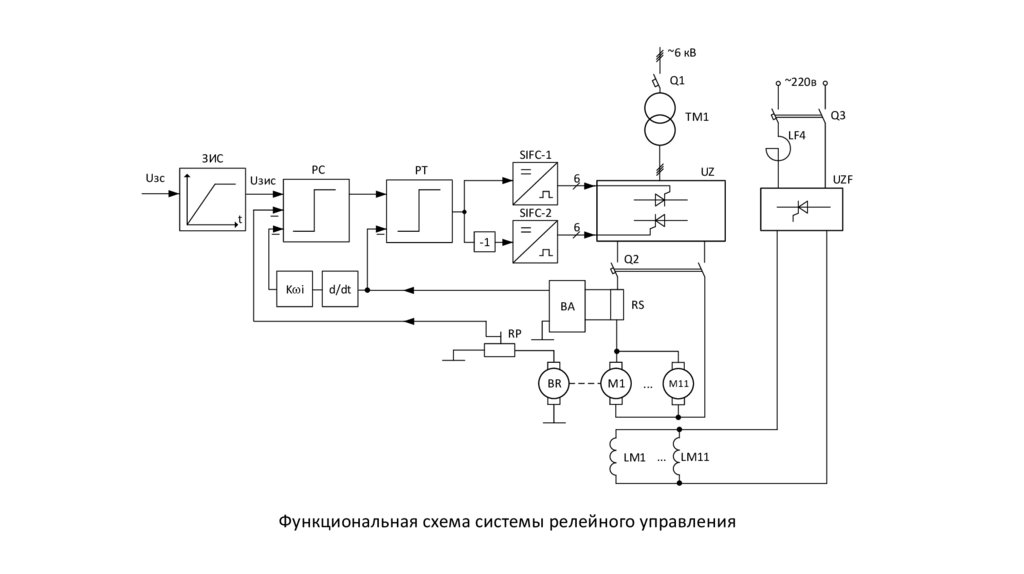
Функциональная схема системы релейного управления
UZF
10.
Схема цифровой модели релейной системы управления11.
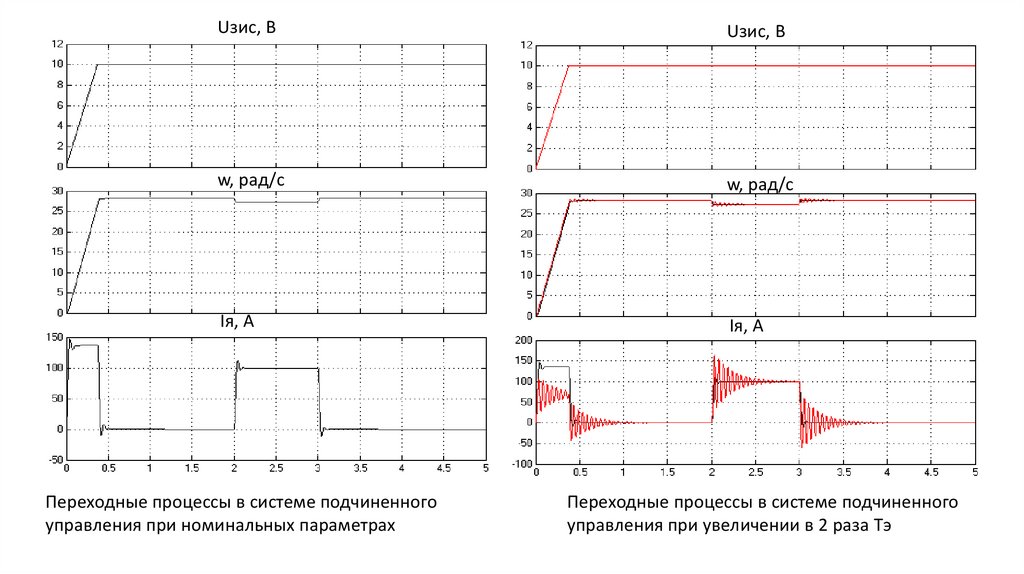
Uзис, ВUзис, В
w, рад/с
w, рад/с
Iя, А
Iя, А
Переходные процессы в системе подчиненного
управления при номинальных параметрах
Переходные процессы в системе подчиненного
управления при увеличении в 2 раза Tэ
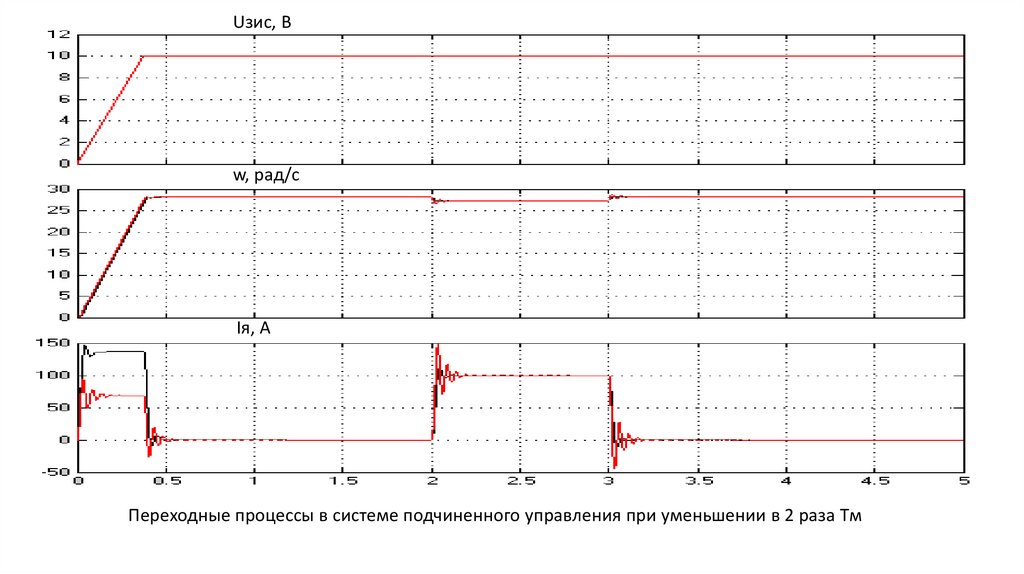
12.
Uзис, Вw, рад/с
Iя, А
Переходные процессы в системе подчиненного управления при уменьшении в 2 раза Tм
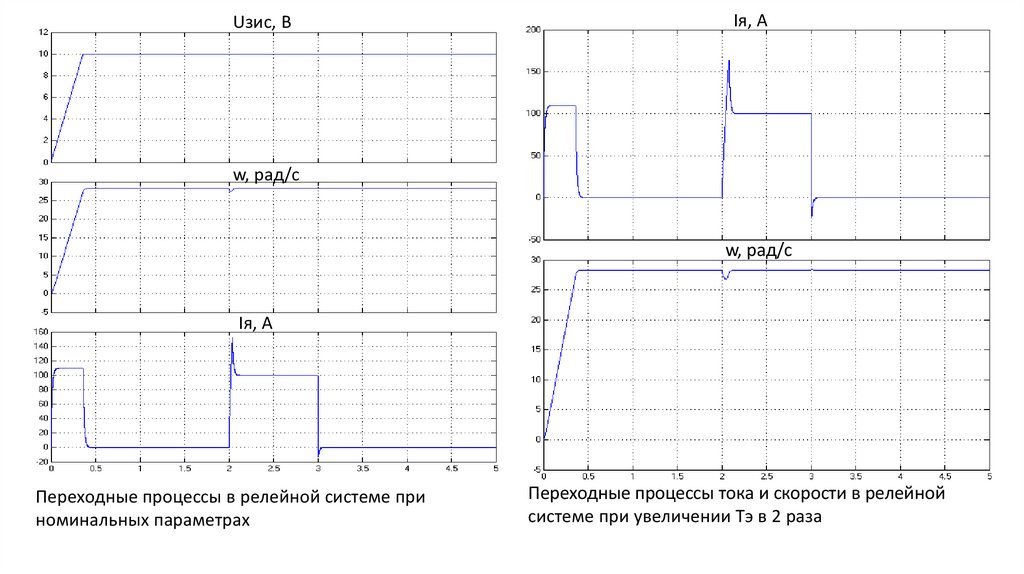
13.
Uзис, ВIя, А
w, рад/с
w, рад/с
Iя, А
Переходные процессы в релейной системе при
номинальных параметрах
Переходные процессы тока и скорости в релейной
системе при увеличении Tэ в 2 раза
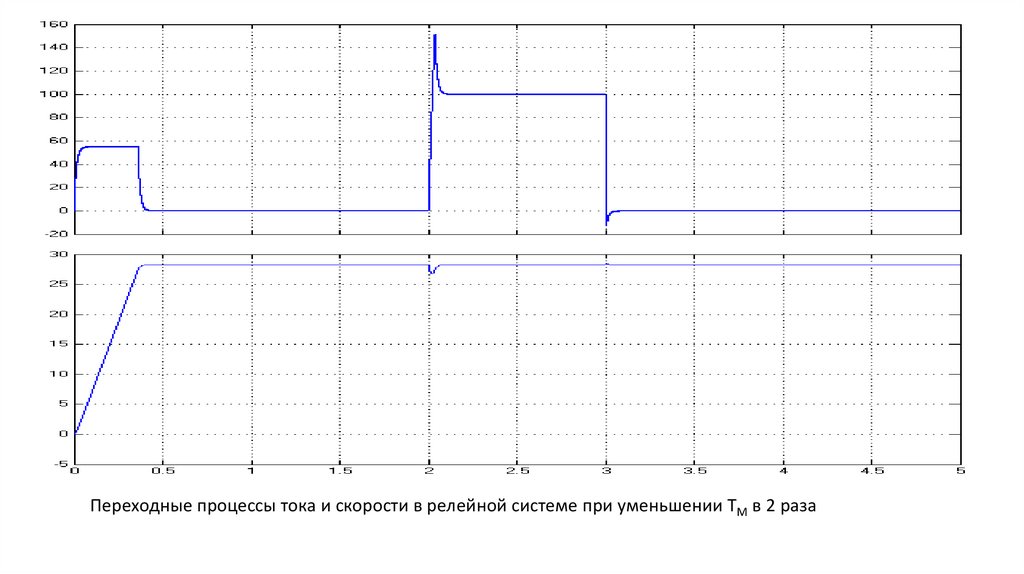
14.
Переходные процессы тока и скорости в релейной системе при уменьшении TМ в 2 раза15.
ВЫВОДЫ- В ходе выполнения магистерской работы были синтезированы: система подчиненного
управления и позиционная система управления электроприводом в пространстве выходной
координаты и ее производных
- В процессе моделирования исследуемых систем при помощи программной среды MatlabSimulink были получены графики переходных процессов при номинальных параметрах
настройки регуляторов, а также при вариации параметров системы (ТЭ и TМ)
- Согласно с полученными результатами было установлено, что релейная система имеет
преимущества перед системой подчиненного управления.
- При смене параметров перерегулирование по току и колебательность релейной системы
значительно меньше, чем системы подчиненного управления
- Релейная система выигрывает в смысле чувствительности к параметрическим и
координатным возмущениям, однако требует мероприятий по обеспечению
помехозащищенности