

 Назначение и функции систем автоматизированного управления электроприводами.")











 Типовые узлы и схемы автоматического управления пуском двигателей постоянного тока")




 Типовые узлы схем управления торможением двигателей постоянного тока.")






 Типовые узлы и схемы управления электроприводами асинхронными двигателями с короткозамкнутым ротором")








 Типовые узлы и схемы управления электроприводами с асинхронными двигателями с фазным ротором.")





 Защита в схемах управления электроприводом.")





 Тиристорное управление асинхронным двигателем с короткозамкнутым ротором")








 Контрольная работа №1")

 Понятие об элементах замкнутых систем управления электроприводами.")




 Регуляторы.")










 Датчики координат автоматического электропривода.")





 Датчики скорости")


 Емкостный датчик положения")








 Индуктивные датчики положения")




 Тензодатчики")










 Трансформаторные датчики")





 Пьезодатчики")





 Термоэлектрические датчики")





 Струнные датчики.")



 Фотоэлектрические датчики")






 Ультразвуковые датчики")





 Задающие элементы.")






 Контрольная работа №2")

 Классификация замкнутых автоматических систем по принципу управления")














 Автоматические системы регулирования момента (усилия).")





 Автоматические системы регулирования скорости и положения рабочего органа.")












 Принципы построения систем управления автоматизированным электроприводом")


















 Принцип регулирования частоты вращения асинхронных двигателей изменением напряжения статора.")














 Системы импульсно-фазового управления.(СИФУ)")

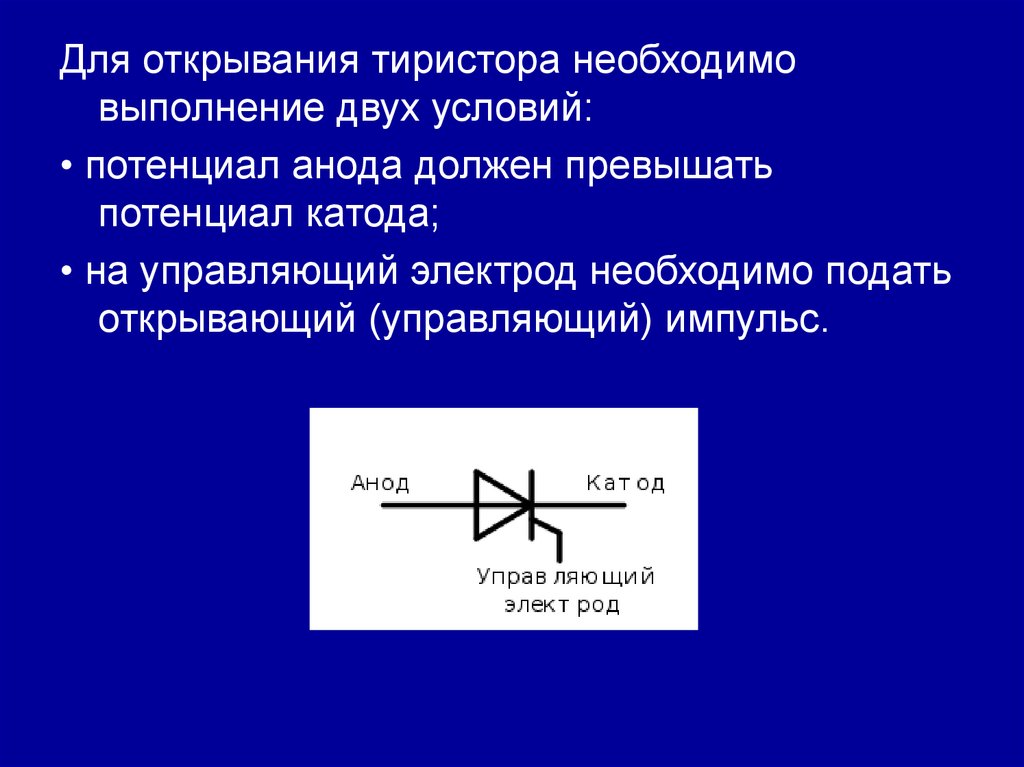
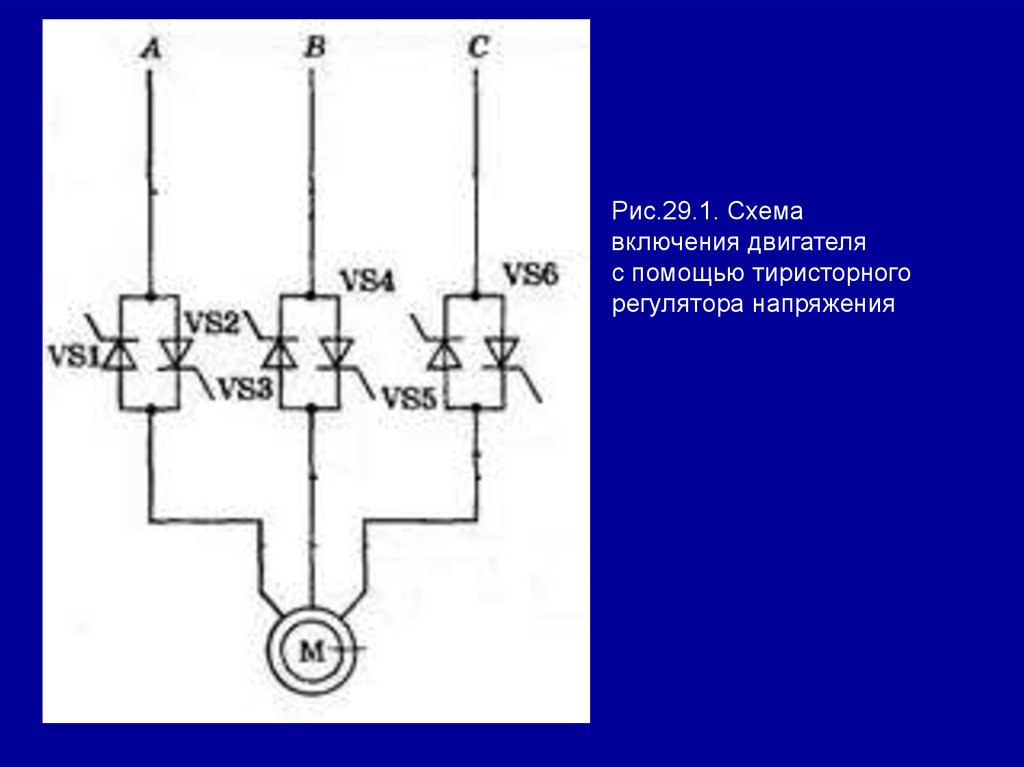






 Схема регулирования частоты вращения асинхронных двигателей изменением напряжения статора с помощью СИФУ")






 Частотный способ регулирования скорости асинхронных двигателей с помощью электромашинных преобразователей.")










 Принцип частотного способа регулирования скорости асинхронных двигателей с помощью статического")













 Частотный способ регулирования скорости асинхронных двигателей с помощью статического преобразователя без")







 Принцип частотного способа регулирования скорости асинхронных двигателей с помощью статического")














 Схема для регулирования скорости асинхронных двигателей с помощью статического преобразователя со звеном")








 Импульсный способ регулирования частоты вращения асинхронных двигателей")












 Контрольная работа № 3.")

 Устройство и основные характеристики шаговых двигателей.")









 Шаговый двигатель в разомкнутой системе управления.")






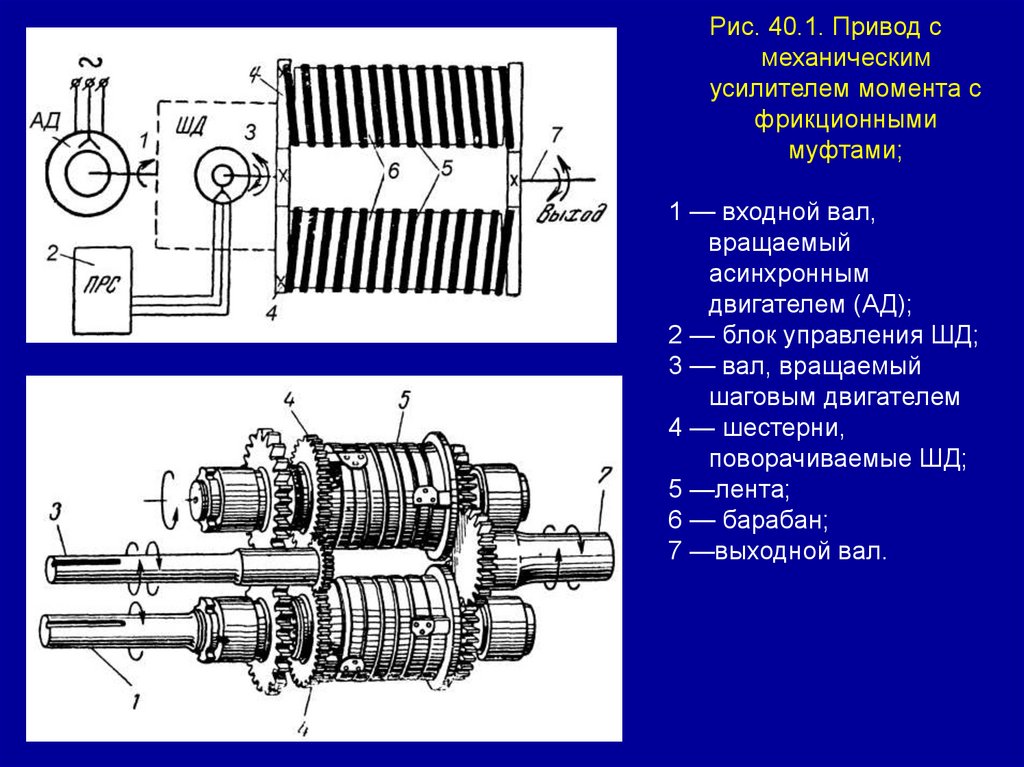
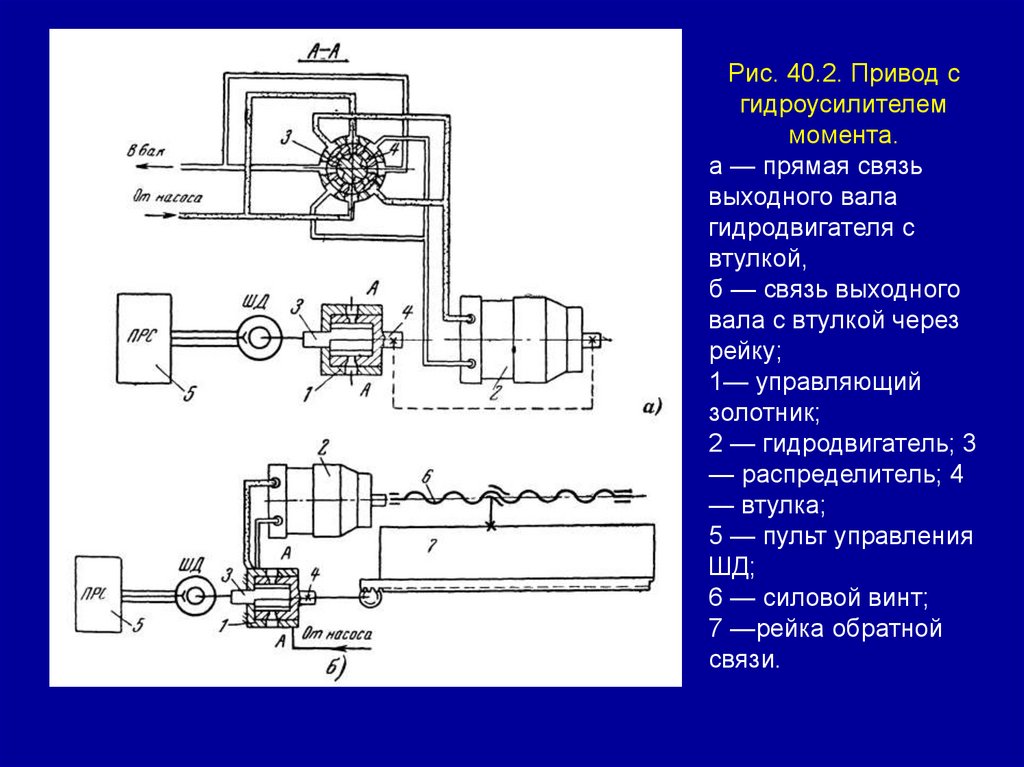
 Усилители момента систем управления с шаговыми двигателями.")





 Замкнутая система управления с шаговым двигателем.")



 Использование шаговых двигателей в периферийных устройствах вычислительных машин.")


 Использование шаговых двигателей в станках с числовым программным управлением.")



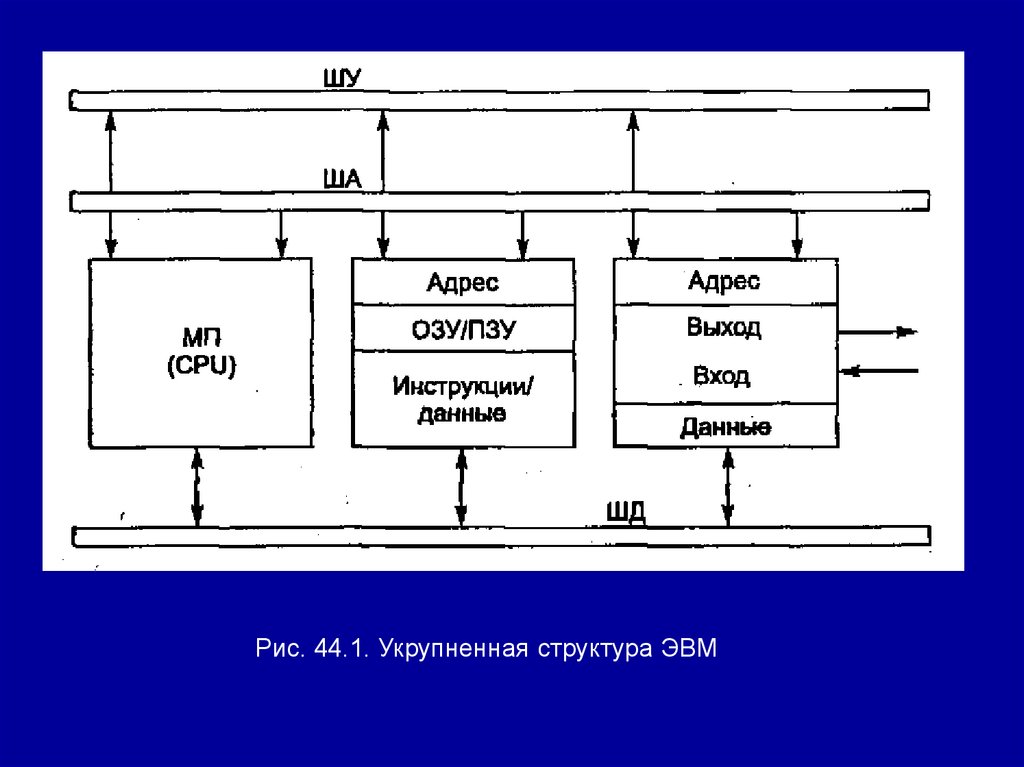
 Общие принципы устройства ЭВМ для управления электроприводами.")












 Основные определения микропроцессорных средств.")








 Память микропроцессорных систем.")





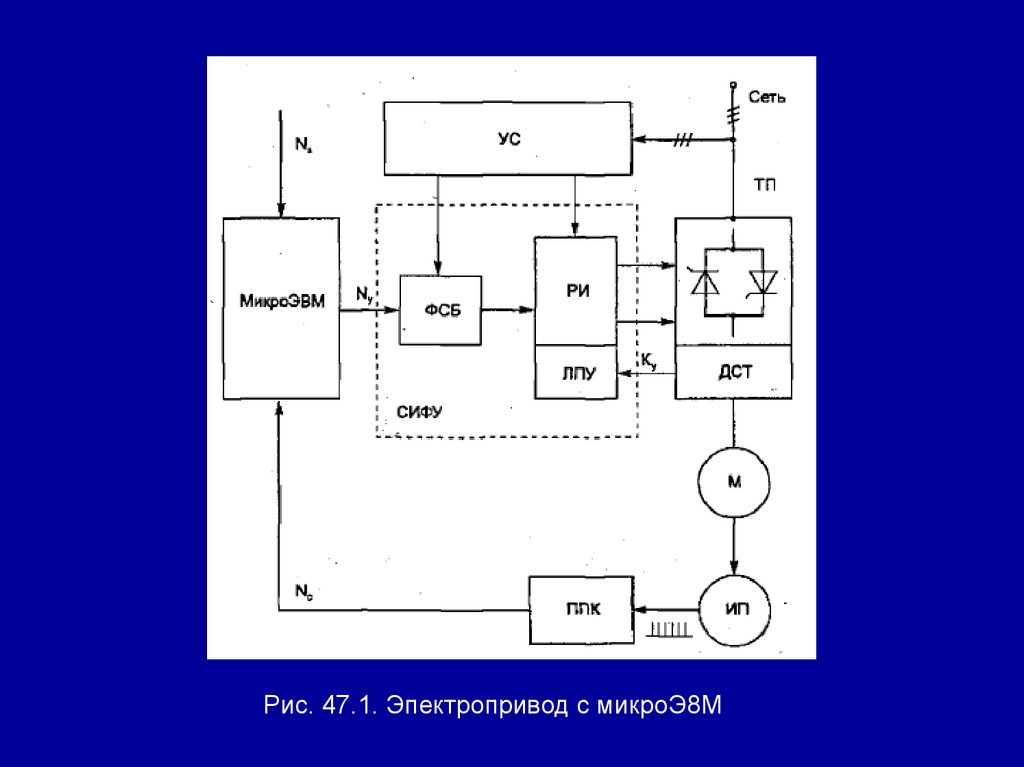
 Функциональные схемы электроприводов с микропроцессорным управлением.")







 Цифровая СИФУ.")








 Контрольная работа № 4.")
 electronics
electronicsSimilar presentations:










Разомкнутые системы автоматизированного управления электроприводами
1. Системы автоматизированного управления электроприводом
2. Тема 1. Разомкнутые системы автоматизированного управления электроприводами.
3. Занятие №1 (2 часа) Назначение и функции систем автоматизированного управления электроприводами.
4.
Автоматизированный электропривод(АЭП) представляет собой
электромеханическую систему,
состоящую из автоматического
управляющего устройства (АУУ),
преобразователя мощности,
передаточного устройства и
электродвигателя, предназначенных
для приведения в движение
исполнительных органов рабочей
машины и управления этим движением.
5.
Электрозадвижка трубопровода –простейший электропривод
6.
Структурная схема такого электроприводаприведена на рис. 1.1.
Электродвигатель и рабочая машина
представляют собой объект управления.
В автоматическое управляющее
устройство, структурная схема которого
дана на рис. 1.2, входят задающее
устройство (ЗУ), корректирующая часть
(КЧ), выполняющая функции
управляющего и формирующего
устройств, и промежуточный усилитель
(ПУ).
7.
Рис. 1.1. Структурная схема автоматизированного электропривода:АУУ — автоматическое управляющее устройство;
Пр — преобразователь; М — электродвигатель;
РМ — рабочий механизм; ОУ — объект управления;
1-3 — обратные связи
8.
Рис. 1.2. Автоматическое управляющее устройствоЗУ - задающее устройство
КЧ - корректирующая часть , выполняющая
функции управляющего и формирующего
устройств,
ПУ - промежуточный усилитель .
9.
Система автоматизированногоуправления электроприводом
(САУЭП)
состоит из автоматического
управляющего устройства и
преобразователя, которые
воздействуют на объект управления.
Выходными параметрами электропривода
являются: скорость, ускорение, угол
поворота, момент, мощность.
10.
В процессе управления этивеличины могут регулироваться по
определенному закону либо
стабилизироваться.
Обозначим, например, задающее
воздействие p(f),
а выходную величину y(t) (рис. 1.3).
11.
Рис. 1.3. Структурная схема САУЭП поразомкнутому циклу.
ЗУ – задающее устройство
УУ — управляющее устройство;
Пр — преобразователь; М — электродвигатель;
РМ — рабочий механизм;
т3, ис , т2, т1, — возмущающие воздействия
12.
Основная задача САУЭП — обеспечитьотработку задающего воздействия,
т.е. выполнение равенства p(t) = y(t)
во все моменты времени работы
электропривода. Но эти функции не
равны, так как в системе существуют
возмущающие воздействия.
К ним относятся нестабильность
напряжения, характеристик элементов
системы, изменение нагрузки и др.
При формировании функции y(t)
необходимо найти оптимальный вариант.
13.
Основные функции САУЭП сводятся к :• управлению процессами пуска, торможения и
реверса электродвигателя,
• стабилизации координат электропривода,
• выполнению слежения за изменяющимися
параметрами,
• программному и адаптивному управлению,
• защите электрических цепей,
• обеспечению заданной последовательности
операций с отдельными элементами и
узлами.
14.
САУЭП — это система, получающая иперерабатывающая информацию.
Она может строиться:
• по разомкнутому циклу,
• по замкнутому циклу,
• по комбинированному циклу.
15.
В разомкнутых системах имеется толькоодин канал информации — задающий.
Выходная величина не воздействует на
входную. Точность отработки заданного
режима невелика.
В разомкнутых системах возможно только
последовательное выполнение работы
элементов схемы: пуск, торможение и
т.д.
16.
В замкнутых системах используются дваканала информации: задающий и канал
обратной связи. Это позволяет
увеличить точность обработки.
В комбинированных системах
объединяются замкнутая и разомкнутая
системы.
Это наиболее совершенные САУЭП
17.
Автоматизированная система управления производством18. Занятие №2 (2 часа) Типовые узлы и схемы автоматического управления пуском двигателей постоянного тока
19.
Пуск двигателя постоянного токапараллельного или независимого
возбуждения осуществляется с
резистором, введенным в цепь якоря.
Резистор необходим для ограничения
пускового тока.
По мере разгона двигателя пусковой
резистор по ступеням выводится.
Когда пуск закончится, резистор будет
полностью зашунтирован.
20.
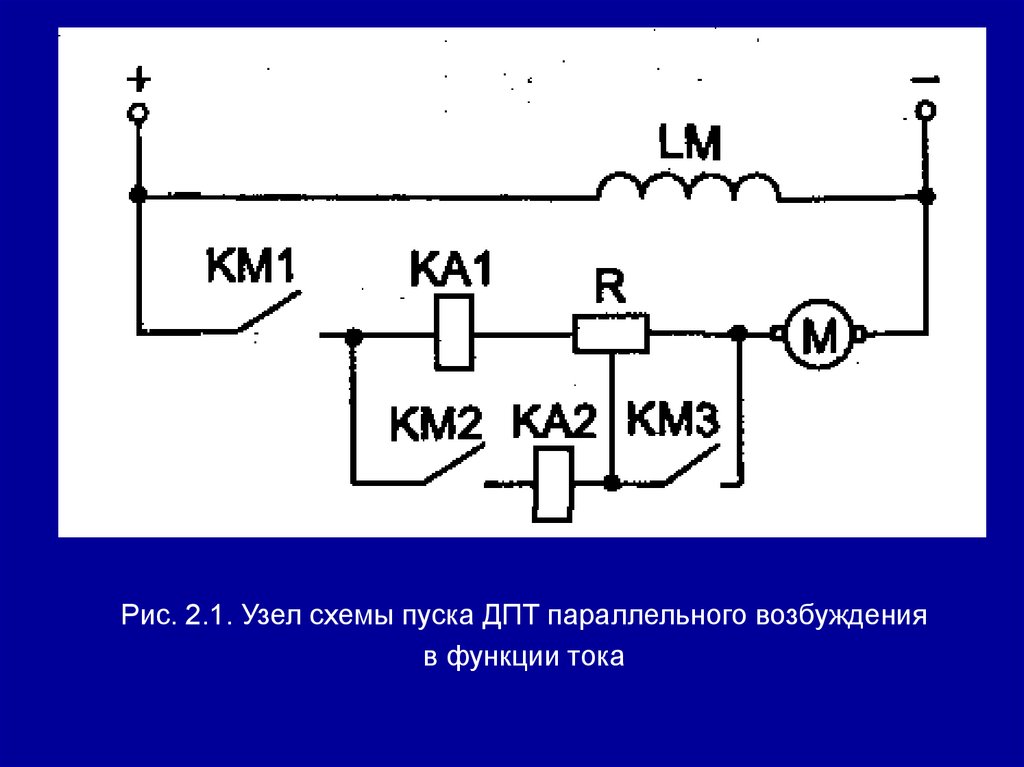
Управление в функции токаосуществляется с помощью реле тока.
Рассмотрим узел схемы пуска ДПТ в
функции тока.
В схеме, приведенной на рис. 2.1.,
применяются реле максимального тока,
которые срабатывают при пусковом
токе I1 и отпадают при минимальном
токе I2 .
21.
Рис. 2.1. Узел схемы пуска ДПТ параллельного возбужденияв функции тока
22.
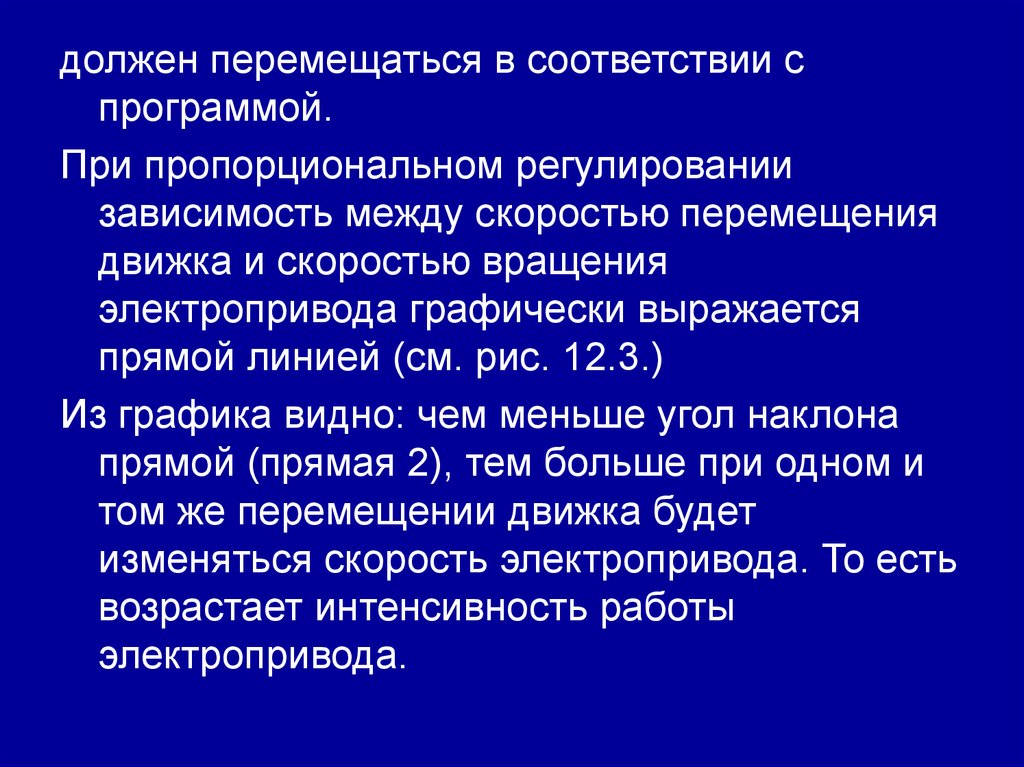
Собственное время срабатываниятоковых реле должно быть меньше
собственного времени срабатывания
контактора. Разгон двигателя
начинается при резисторе, полностью
введенном в цепь якоря. КМ1 замкнут.
По мере разгона двигателя ток
уменьшается, при токе I2 реле КА1
отпадает и своим контактом замыкает
цепь питания контактора КМ2 (на схеме
не показано), который своим контактом
КМ2 шунтирует первую пусковую
ступень резистора.
23.
Аналогично осуществляетсязакорачивание второй пусковой ступени
резистора (реле КА2, контактор КМЗ).
Цепи питания контакторов на схеме не
показаны.
По окончании пуска двигателя резистор в
цепи якоря будет зашунтирован.
24. Занятие №3 (2 часа) Типовые узлы схем управления торможением двигателей постоянного тока.
25.
В системах автоматического управления ДПТприменяется:
• динамическое торможение;
• торможение противовключением;
• рекуперативное торможение(перевод в
генераторный режим).
При динамическом торможении необходимо
обмотку якоря двигателя замкнуть на
добавочное сопротивление, а обмотку
возбуждения оставить под напряжением,
Такое торможение можно осуществить в
функции скорости и в функции времени.
26.
Управление в функции скорости придинамическом торможении можно выполнить
по схеме, приведенной на рис. 3.1.
При отключении контактора КМ1 якорь
двигателя отключается от сети, но на его
зажимах в момент отключения имеется
напряжение.
Реле напряжения KV срабатывает и замыкает
свой контакт в цепи контактора КМ2, который
своим контактом замыкает якорь двигателя
на резистор R,
При скорости, близкой к нулю, реле KV теряет
питание.
27.
Рис. 3.1. Узел схемы автоматического управления динамическимторможением в функции скорости:
а — силовая цепь; б — цепь управления
28.
Дальнейшее торможение от минимальнойскорости до полной остановки происходит
под действием статического момента
сопротивления.
Для увеличения эффективности торможения
можно применить две или три ступени
торможения
Динамическое торможение ДПТ независимого
возбуждения в функции времени
осуществляется по схеме, приведенной на
рис. 3. 2.
29.
Рис. 3.2. Узел схемыдинамического торможения
ДПТ независимого
возбуждения в функции
времени
30.
При работе двигателя реле времени КТвключено, но цепь контактора торможения
КМ2 разомкнута.
Для торможения необходимо нажать кнопку
SB2 «Стоп». Контактор KM1 и реле времени
КТ теряют питание; срабатывает контактор
КМ2, так как контакт КМ 1 в цепи контактора
КМ2 замыкается, а контакт реле времени КТ
размыкается с выдержкой времени.
На время выдержки реле времени контактор
КМ2 получает питание, замыкает свой
контакт и подключает якорь двигателя к
добавочному резистору R.
31.
Осуществляется динамическое торможениедвигателя. В конце его реле КТ после
выдержки времени размыкает свой контакт и
отключает контактор КМ2 от сети.
Дальнейшее торможение до полной
остановки осуществляется под действием
момента сопротивления.
32.
Системы автоматического разгона и торможения широко используются вэлектропоездах
33. Занятие №4 (2 часа) Типовые узлы и схемы управления электроприводами асинхронными двигателями с короткозамкнутым ротором
34.
Управление асинхронными двигателями скороткозамкнутым ротором можно
производить с помощью магнитных
пускателей или контакторов.
При применении двигателей малой мощности,
не требующих ограничения пусковых токов,
пуск осуществляется включением их на
полное напряжение сети.
Простейшая схема управления двигателем
представлена на рис. 4.1.
35.
Рис. 4.1. Схема управления асинхронным двигателем скороткозамкнутым ротором
с нереверсивным магнитным пускателем
36.
Для пуска включается автоматическийвыключатель QF и тем самым подается
напряжение на силовую цепь схемы и цепь
управления.
При нажатии кнопки SB1 «Пуск» замыкается
цепь питания катушки контактора КМ,
вследствие чего его главные контакты в
силовой цепи также замыкаются,
присоединяя статор электродвигателя М к
питающей сети.
Одновременно в цепи управления замыкается
блокировочный контакт КМ, что создает цепь
питания катушки КМ (независимо от
положения контакта кнопки).
37.
Отключение электродвигателя осуществляетсянажатием кнопки SB2 «Стоп».
При этом разрывается цепь питания контактора
КМ, что приводит к размыканию всех его
контактов, двигатель отключается от сети,
после чего необходимо отключить
автоматический выключатель QF,
38.
В схеме предусмотрены следующие видызащит:
• от коротких замыканий — с помощью
автоматического выключателя QF и
предохранителей FU;
• от перегрузок электродвигателя — с помощью
тепловых реле КК (размыкающие контакты
этих реле при перегрузках размыкают цепь
питания контактора КМ, тем самым отключая
двигатель от сети);
39.
• нулевая защита — с помощью контактора КМ(при снижении или исчезновении напряжения
контактор КМ теряет питание, размыкая свои
контакты, и двигатель отключается от сети).
Для включения двигателя необходимо вновь
нажать кнопку SB1 «Пуск».
Если прямой пуск двигателя невозможен и
необходимо ограничить пусковой ток
асинхронного короткозамкнутого двигателя,
применяют пуск на пониженное напряжение.
Для этого в цепь статора включают активное
сопротивление или реактор либо применяют
пуск через автотрансформатор.
40.
На рис. 4.2. приведена схема управленияасинхронным двигателем с короткозамкнутым
ротором с симметричными сопротивлениями
в цепи статора.
Включается автоматический выключатель QF,
подается напряжение на силовую цепь и цепь
управления.
После нажатия на кнопку SB1 срабатывает
контактор КМ1, силовые контакты которого
замыкаются и подключают двигатель к сети с
активными сопротивлениями в цепи статора.
41.
Рис. 4.2. Схема управления асинхронным двигателем скороткозамкнутым ротором с симметричными сопротивлениями в
цепи статора
42.
Одновременно получает питание реле времениКТ, поскольку контакт КМ1 в цепи реле КТ
замыкается.
По истечении времени, равного выдержке
времени реле КТ, замыкается контакт КТ,
вследствие чего контактор КМ 2 срабатывает
и своими контактами шунтирует
сопротивления в цепи статора.
Пуск заканчивается. Для остановки двигателя
нажимается кнопка SB2 «Стоп» и
отключается автоматический выключатель
QF.
43.
Комплекты магнитных пускателей для управления асинхроннымиэлектродвигателями.
44. Занятие №5 (2 часа) Типовые узлы и схемы управления электроприводами с асинхронными двигателями с фазным ротором.
45.
Пуск двигателя с фазным роторомосуществляется с введенными резисторами в
цепи ротора.
Резисторы в цепи ротора служат для
ограничения токов не только в процессе
пуска, но и при реверсе, торможении, а также
при снижении скорости.
По мере разгона двигателя для поддержания
ускорения привода резисторы выводятся.
Когда пуск закончится, резисторы полностью
шунтируются.
46.
На рис. 5.1. приведена схема асинхронногодвигателя с фазным ротором, где с помощью
релейно-контакторной аппаратуры
осуществляется пуск двигателя в две
ступени, причем напряжение подается
одновременно на силовые цепи и цепи
управления с помощью выключателя QF.
Управление двигателем осуществляется в
функции времени. При подаче напряжения в
цепь управления реле времени КТ1, КТ2
срабатывают и размыкают свои контакты.
Далее нажимается кнопка SB1. Это приводит
к срабатыванию контактора КМЗ
47.
Рис. 5.1. Схема пуска асинхронного двигателя с фазным ротором48.
и пуску двигателя с резисторами, введенными вцепи ротора, так как контакторы КМ1 и КМ2
питания не получают.
При включении контактора КМЗ реле КТ1
теряет питание и замыкает свой контакт в
цепи контактора КМ1 через промежуток
времени, равный выдержке времени реле
КТ1.
По истечении указанного времени включается
контактор КМ1, шунтирующий первую
пусковую ступень резисторов.
49.
Одновременно размыкающий контакт КМ1 вцепи реле КТ2 размыкается, реле КТ2 теряет
питание и с выдержкой времени замыкает
свой контакт в цепи контактора КМ2, который
срабатывает через промежуток, равный
выдержке времени реле КТ2, и шунтирует
вторую ступень резисторов в цепи ротора.
50. Занятие №6 (2 часа) Защита в схемах управления электроприводом.
51.
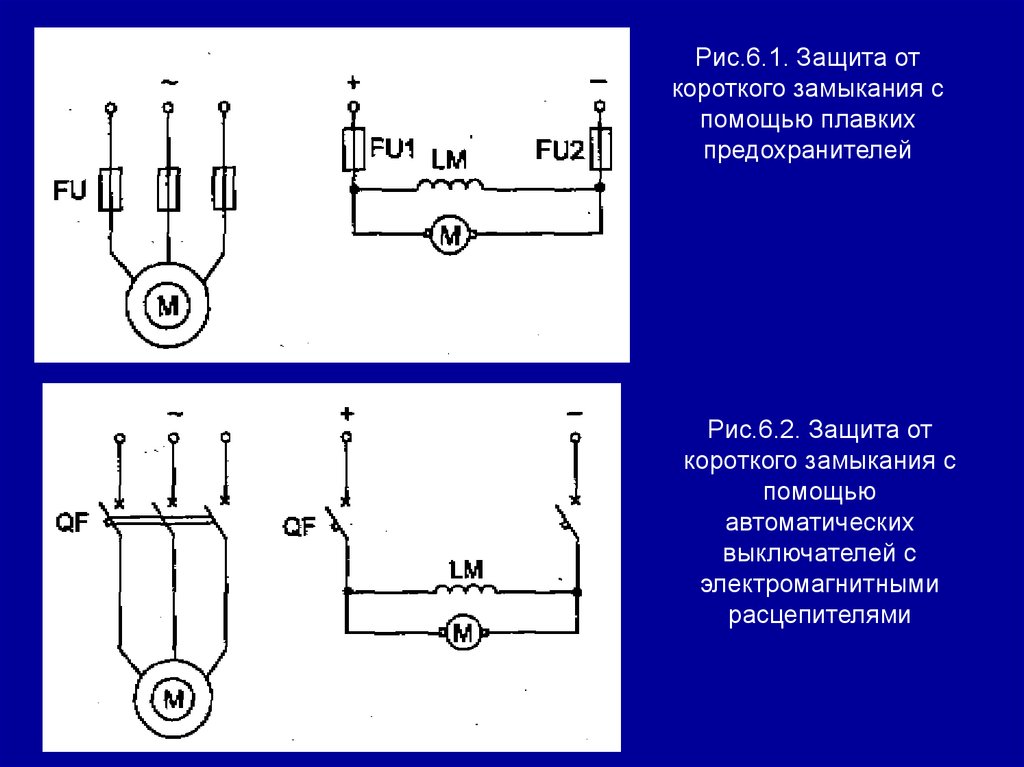
6.1. Защита двигателя от короткого замыканияи перегрузки.
Защита в схемах управления электроприводом
необходима для быстрого отключения цепей
при возникновении аварийного режима
работы. Это способствует сохранению
работоспособности электрооборудования и
повышению надежности работы схем.
Защита от короткого замыкания
осуществляется с помощью плавких
предохранителей, (рис. 6.1.) или
автоматических выключателей с
электромагнитными расцепителями (рис. 6.2).
52.
Рис.6.1. Защита откороткого замыкания с
помощью плавких
предохранителей
Рис.6.2. Защита от
короткого замыкания с
помощью
автоматических
выключателей с
электромагнитными
расцепителями
53.
Силовые цепи в цепи управления можнозащищать одними и теми же аппаратами для
двигателей малой мощности либо иметь
отдельную защиту (рис. 6.3.).
Реле максимального тока КА защищает
силовые цепи от коротких замыканий и
недопустимо больших толчков тока.
Защита двигателя от перегрузки может
осуществляться тепловым реле или
тепловыми расцепителями автоматических
выключателей (рис.6.4.) Тепловые реле
включаются в силовые цепи двигателя, а
контакты этих реле — в цепи управления.
54.
Рис.6.3. Схемазащиты от
коротких
замыканий с
помощью
реле
максимального
тока.
Рис.6.4. Схема
защиты от
коротких
замыканий с
помощью
тепловых реле.
55.
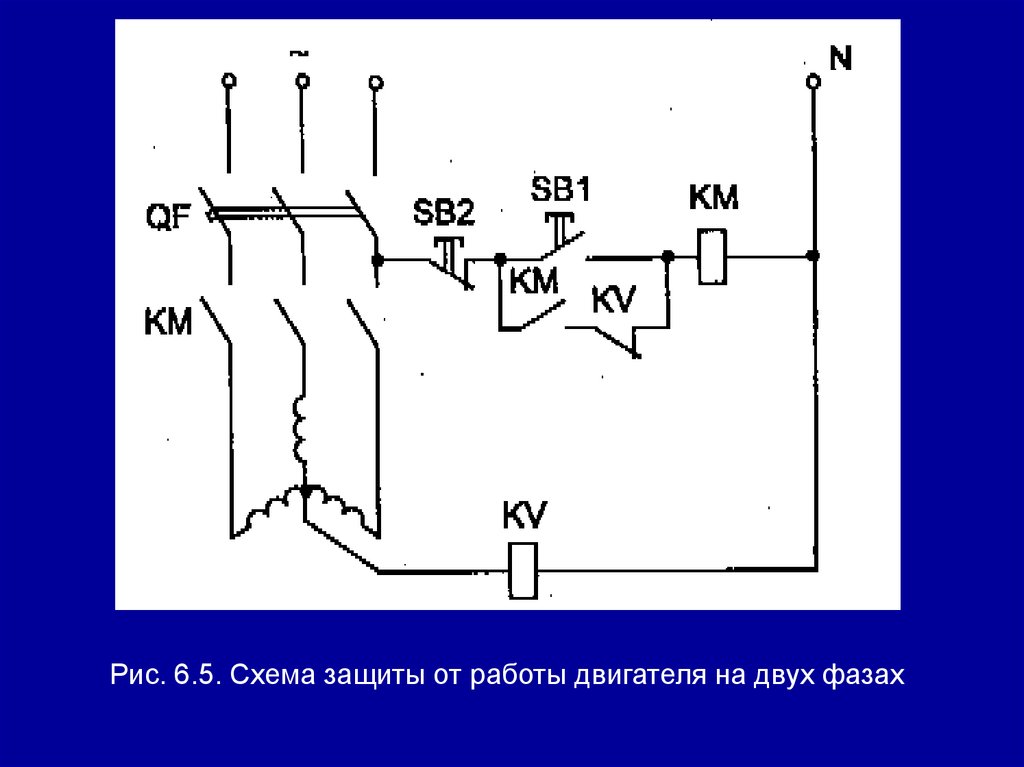
6.2. Защита от работы на двух фазах.В трехфазной силовой цепи при перегорании
одного предохранителя возможна работа на
двух фазах (рис. 6.5.), что приводит к
перегреванию двигателей.
При нормальной трехфазной работе двигателя
напряжение на реле напряжения KV равно
нулю. При обрыве фазы появляется
напряжение на реле KV, которое срабатывает
и размыкает свой контакт в цепи питания
контактора КМ, что приводит к отключению
двигателя от сети.
56.
Рис. 6.5. Схема защиты от работы двигателя на двух фазах57.
6.3. Защита от самозапуска двигателей(нулевая защита).
Такая защита позволяет предотвратить
самозапуск двигателя при исчезновении или
значительном снижении напряжения.
Она осуществляется с помощью контактора.
При исчезновении или снижении напряжения
сети контактор отпадает, размыкая свои
контакты, и двигатель отключается от сети.
58.
6.4. Блокировочные связи в схемах управленияэлектроприводами.
Блокировочные связи обеспечивают
надежность работы схемы, необходимую
последовательность работы отдельных
элементов и предотвращают ошибочные
действия оператора.
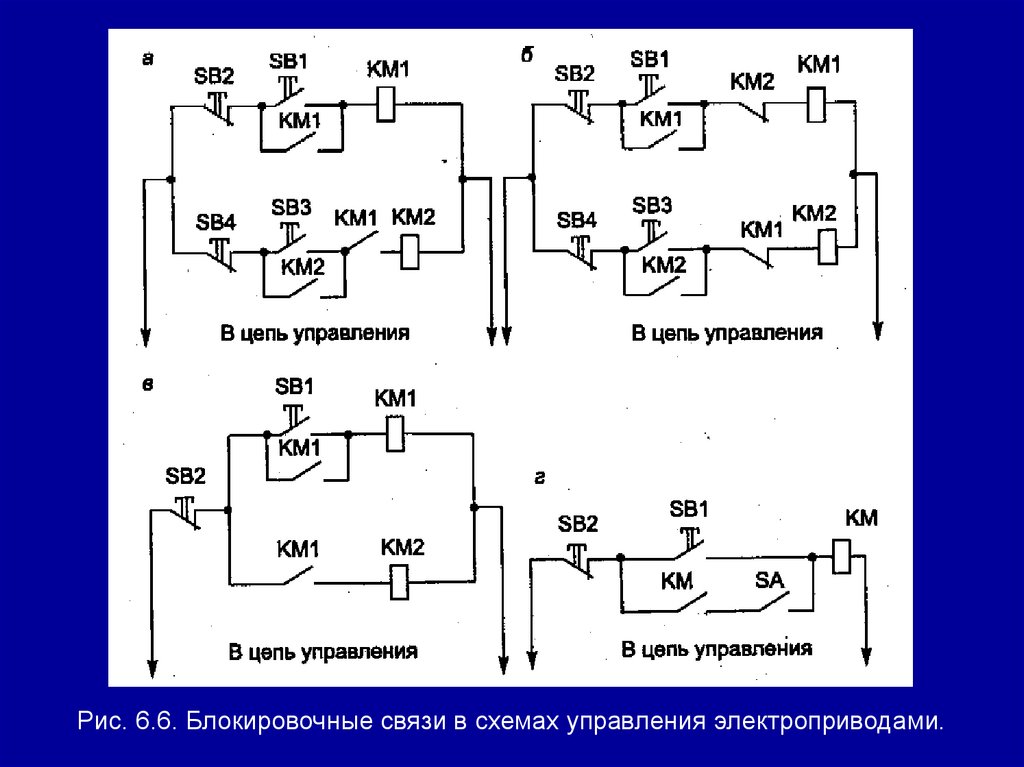
Схема на рис. 6.6, «а» предусматривает
возможность включения второго двигателя
только после включения первого. Блокировка
осуществляется с помощью замыкающего
контакта КМ1 в цепи контактора КМ 2.
59.
Рис. 6.6. Блокировочные связи в схемах управления электроприводами.60.
Схема, приведенная на рис. 6.6. «б»,предусматривает раздельное включение
контакторов. Блокировка осуществляется с
помощью размыкающих контактов КМ1 и КМ2.
Схема на рис. 6.6. «в» позволяет работать двум
двигателям одновременно. Блокировка
осуществляется замыкающим контактом КМ1.
Схема, показанная на рис. 6.6. «г», позволяет
включать кратковременно и длительно
контактор при наладочных работах. При
кратковременной работе ключ SA не включен,
при длительной работе включается ключ SA и
контактор КМ становится на самопитание.
61. Занятие №7 (2 часа) Тиристорное управление асинхронным двигателем с короткозамкнутым ротором
62.
7.1. Понятие о тиристорахТири́стор — полупроводниковый прибор,
выполненный на основе монокристалла
полупроводника с тремя или более p-nпереходами и имеющий два устойчивых
состояния:
• закрытое состояние, то есть состояние
низкой проводимости,
• открытое состояние, то есть состояние
высокой проводимости.
Тиристор можно рассматривать как
электронный выключатель (ключ).
63.
Основное применение тиристоров —управление мощной нагрузкой с помощью
слабых сигналов, а также переключающие
устройства.
Существуют различные виды тиристоров,
которые подразделяются, главным образом,
по способу управления и по проводимости.
Различие по проводимости означает, что
бывают тиристоры, проводящие ток в одном
направлении (например тринистор, см. рис) и
в двух направлениях (например, симисторы,
симметричные динисторы).
64.
Тири́стор —полупроводниковый прибор,
65.
Электрошкафы для тиристорного управления электроустановками.66.
7.2. Тиристорное управлениеасинхронным двигателем с
короткозамкнутым ротором
Для управления асинхронным двигателем
могут использоваться тиристоры в
сочетании с релейно-контакторными
аппаратами.
Тиристоры применяются в качестве
силовых элементов и включаются в
статорную цепь, релейно-контакторные
аппараты включаются в цепь
управления.
67.
Используя тиристоры в качестве силовыхкоммутаторов, можно на статор при пуске
подавать напряжение от нуля до
номинального значения, ограничивать токи и
моменты двигателя, осуществлять
эффективное торможение либо шаговый
режим работы.
Такая схема приведена на рис. 7.1.
Силовая часть схемы состоит из группы
тиристоров VS1...VS4, включенных встречнопараллельно в фазы А и С.
68.
Силовая цепьЦепь управления
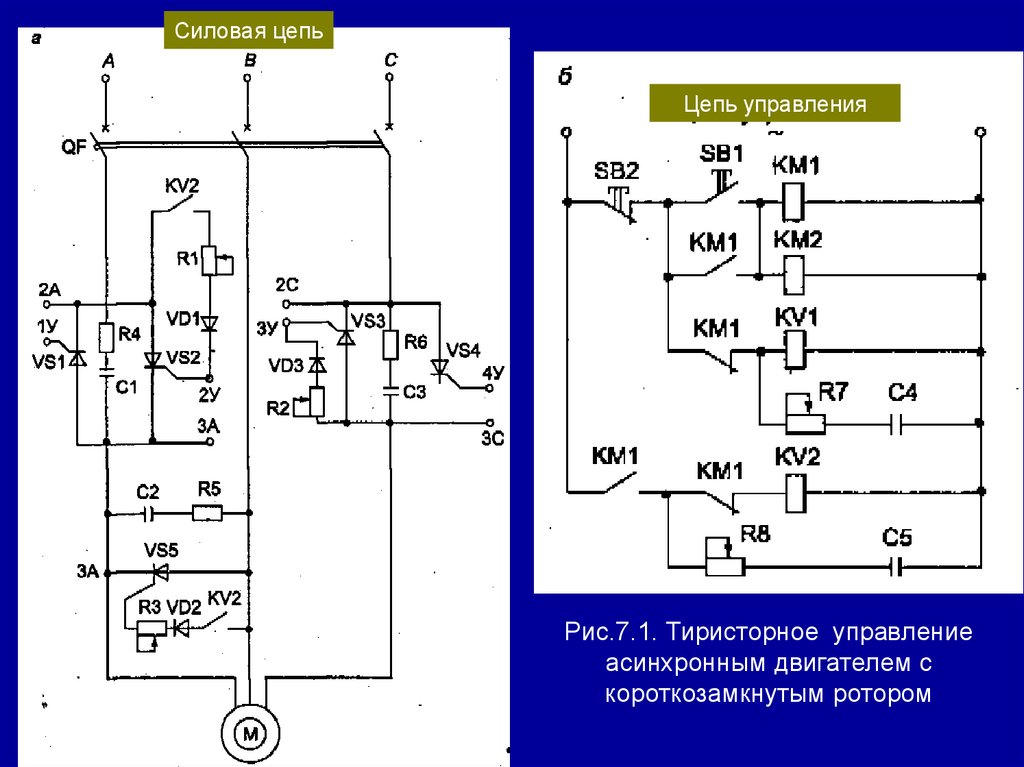
Рис.7.1. Тиристорное управление
асинхронным двигателем с
короткозамкнутым ротором
69.
Рис.7.1.Блок управления
тиристорами — БУ
70.
Между фазами А и В включенкороткозамыкающии тиристор VS5.
Схема состоит из силовой цепи (рис. 7.1, а),
цепи управления (рис. 7.1,б) и блока
управления тиристорами — БУ (рис. 7.1.в).
Для пуска двигателя включается
автоматический выключатель QF, нажимается
кнопка SB1 «Пуск», в результате чего
включаются контакторы КМ1 и КМ2.
На управляющие электроды тиристоров
VS1...VS4 подаются импульсы, сдвинутые на
60º относительно питающего напряжения.
71.
К статору двигателя прикладываетсяпониженное напряжение, что приводит к
снижению пускового тока и пускового
момента.
Размыкающий контакт КМ1 отключает реле KV1
с выдержкой времени, которая определяется
резистором R7 и конденсатором С4.
Размыкающими контактами реле KV1
шунтируются соответствующие резисторы в
блоке управления, и на статор подается
полное напряжение сети.
72.
Для торможения нажимается кнопка SB2«Стоп». Схема управления теряет питание,
отключаются тиристоры VS1 ...VS4.
Это приводит к тому, что на период торможения
включается реле KV2 за счет энергии,
запасенной конденсатором С53 и своими
контактами включает тиристоры VS2 и VS5.
Через фазы А к В статора проходит постоянный
ток, который регулируется резисторами R1 и
R3, Обеспечивается эффективное
динамическое торможение.
73. Занятие №8 (2 часа) Контрольная работа №1
74. Тема 2. Элементы замкнутых систем управления электроприводом .
75. Занятие №9 (2 часа) Понятие об элементах замкнутых систем управления электроприводами.
76.
Под термином «элемент»автоматизированного электропривода
понимается входящее в него,
устройство, выполняющее
определенную функцию управления, в
соответствии с которой входное
воздействие элемента преобразуется в
выходное.
АЭП можно представить в виде
совокупности силовых и управляющих
элементов (рис. 9.1).
77.
Рис. 9.1. Структурная схема автоматизированного электропривода78.
Силовые элементы преобразуют, регулируют иприводят к рабочему органу (РО) механизма
основной поток энергии.
Управляющие элементы формируют,
преобразуют и подводят сигналы управления
к силовым элементам.
К силовым элементам относятся управляемые
преобразователи энергии УПЭ,
электродвигатели (М), передаточные
механизмы (ПМ), рабочие органы машин и
механизмов.
79.
Управляющие элементы можно разделить надве группы:
1) элементы систем управления вентилями
УПЭ, которые преобразуют сигнал
управления с выхода системы
автоматического управления (САУ) в
открывающие импульсы;
2) элементы САУ, формирующие задающие и
управляющие воздействия и определяющие
статические и динамические свойства АЭП.
80.
По функциональному признаку элементывторой группы делятся на следующие виды:
• регуляторы (Р), которые вычисляют разность
сигналов задания и обратной связи
(рассогласование) и на ее основе формируют
управляющее воздействие, приводящее
регулируемую координату к заданному
значению;
• датчики (Д), преобразующие управляемую
координату в электрический сигнал,
используемый как сигнал обратной связи
81.
• задающие элементы (ЗЭ), которыеформируют задающие воздействия,
определяющие технологическую
программу работы АЭЦ
• согласующие элементы (СЭ), которые
согласуют выходные и входные
координаты соединяемых элементов по
роду тока, виду и уровню сигналов и т.п.
82. Занятие №10 (2 часа) Регуляторы.
83.
10.1. Общие сведенияРегуляторы вычисляют разность сигналов
задания и обратной связи (рассогласование)
и на ее основе формируют управляющее
воздействие, приводящее регулируемую
координату к заданному значению;
В САУ используются в основном следующие
типы регуляторов:
• пропорциональный (П),
• интегральный (И),
• пропорционально-интегральный (ПИ),
• пропорционально-интегральнодифференциальный (ПИД).
84.
В зависимости от вида преобразуемыхсигналов различают аналоговые и цифровые
регуляторы.
Аналоговые регуляторы (АР) реализуются на
основе операционных усилителей,
цифровые — на основе специализированных
вычислительных устройств или
микропроцессоров.
Аналоговые регуляторы преобразуют только
аналоговые сигналы, являющиеся
непрерывными функциями времени. При
прохождении через АР преобразуется каждое
мгновенное значение непрерывного сигнала.
85.
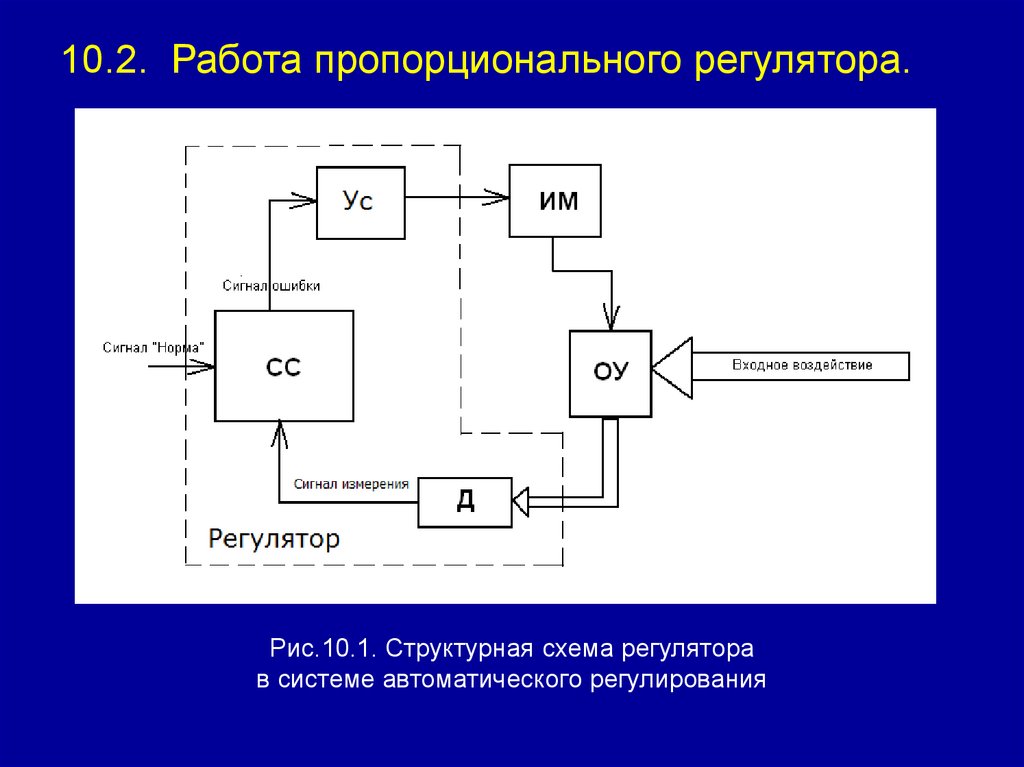
10.2. Работа пропорционального регулятора.Рис.10.1. Структурная схема регулятора
в системе автоматического регулирования
86.
система автоматического управлениявключает:
объект управления (ОУ);
исполнительный механизм (ИМ);
Регулятор
В свою очередь регулятор содержит:
усилитель;
схему сравнения
датчик;
87.
ОУ - объект управления, агрегат ,вкотором происходит технологический
процесс (трубопровод, камера сгорания,
станок, электропечь и т.п.)
ИМ - исполнительный механизм ,
устройство оказывающее управляющее
воздействие на объект
управления.(электропривод заглушкой
трубопровода и т.п.)
88.
СС - схема сравнения , сравнивающаядва сигнала - один измеренный с
датчика, другой сигнал «НОРМА» с
памяти системы управления.
Д - датчик - преобразователь,
преобразует неэлектрический параметр
объекта управления в электрический
сигнал, поступающий на схему
сравнения.
Ус – усилитель электрического сигнала.
89.
Рассмотрим работу системыавтоматического управления с
пропорциональным регулятором
В качестве технологического процесса
возьмем процесс транспортировки
нефти в трубопроводе с постоянным
давлением.
90.
Объектом управления является задвижкатрубопровода, регулирующая сечение
трубопровода и тем самым давление
нефти в нем.
Исполнительным механизмом является
электропривод задвижки.
Остальные элементы входят в
структурную схему регулятора
91.
При транспортировке нефти данная системадолжна обеспечить постоянное давление
нефти в трубопроводе.
Но в процессе прокачки нефти в результате
внешних воздействий давление в скважине
может меняться. Рассматриваемая
автоматическая система регулирования
обеспечивает давление нефти в
трубопроводе постоянным.
92.
Система работает следующим образом:Допустим в результате внешнего воздействия
давление в трубопроводе начинает
уменьшаться.
Датчик выдает электрический сигнал
пропорциональный давлению нефти в
трубопроводе, который подается на схему
сравнения. Одновременно по другому каналу
на схему сравнения подается электрический
сигнал соответствующий норме давления.
В схеме сравнения производится анализ двух
поступающих сигналов и вырабатывается
"сигнал ошибки " или, иначе, сигнал
рассогласования.
93.
В рассматриваемом случае сигнал с датчикабудет меньше сигнала "НОРМА". т.е.
U норма – U датчик = ∆U
Сигнал ошибки имеет положительный знак. Он
подается на усилитель. Усиленный сигнал
подается на исполнительный механизм
(электропривод задвижки). Задвижка
поднимается и давление нефти в
трубопроводе увеличивается. По мере
увеличения давления в трубопроводе сигнал
ошибки уменьшается и исполнительный
механизм призакрывает задвижку.
94.
Таким образом система сама следит задавлением в трубопроводе и поддерживает
его в заданных пределах. В основе работы
системы лежит прямо пропорциональная
зависимость между величиной не
электрического параметра (давление) и
величиной электрического параметра
(напряжение), снимаемой с выхода
регулятора.
Если на вход схемы сравнения подавать по
каналу "НОРМА" программно изменяющийся
сигнал, то система будет отрабатывать
заданную программу изменения параметра.
95.
В пропорциональном регуляторе зависимостьмежду электрическими величинами на его
входе и выходе прямо пропорциональна.
В дифференциальном регуляторе зависимость
между электрическими величинами на его
входе и выходе соответствует первой
производной этих величин.
В интегральном регуляторе зависимость между
электрическими величинами на его входе и
выходе соответствует интегралу этих
величин.
96. Занятие №11 (2 часа) Датчики координат автоматического электропривода.
97.
11.1. Общие определения.В АЭП для получения сигналов обратной
связи по управляемым координатам
используются датчики.
Датчик представляет собой устройство,
информирующее о состоянии
управляемой координаты АЭП путем
взаимодействия с ней и
преобразования реакции на это
взаимодействие в электрический
сигнал.
98.
Управляемыми в АЭП являютсяэлектрические и механические
координаты:
• ток,
• напряжение,
• давление
• уровень жидкости,
• скорость,
• перемещение и т.д.
Для их измерения используют
соответствующие датчики.
99.
Автоматическое управление ,контроль ирегулирование параметров
технологического процесса
предусматривает наличие датчиков для
непосредственного измерения параметров
процесса.
Датчики преобразуют входное воздействие
(температуру, давление, перемещение
объекта, изменение объема) в
электрический сигнал для дальнейшего
использования его в автоматической
системе управления.
100.
Измеряя величину тока можно судить овеличине давления или другого
параметра в рабочей зоне.
101. Датчики
Датчик давленияДатчик перемещения
Датчик температуры
Датчик освещенности
102. Видео: Датчики уровня жидкости смотреть
103. Видео: Датчики температуры Смотреть
104. Занятие №12 (2 часа) Датчики скорости
105.
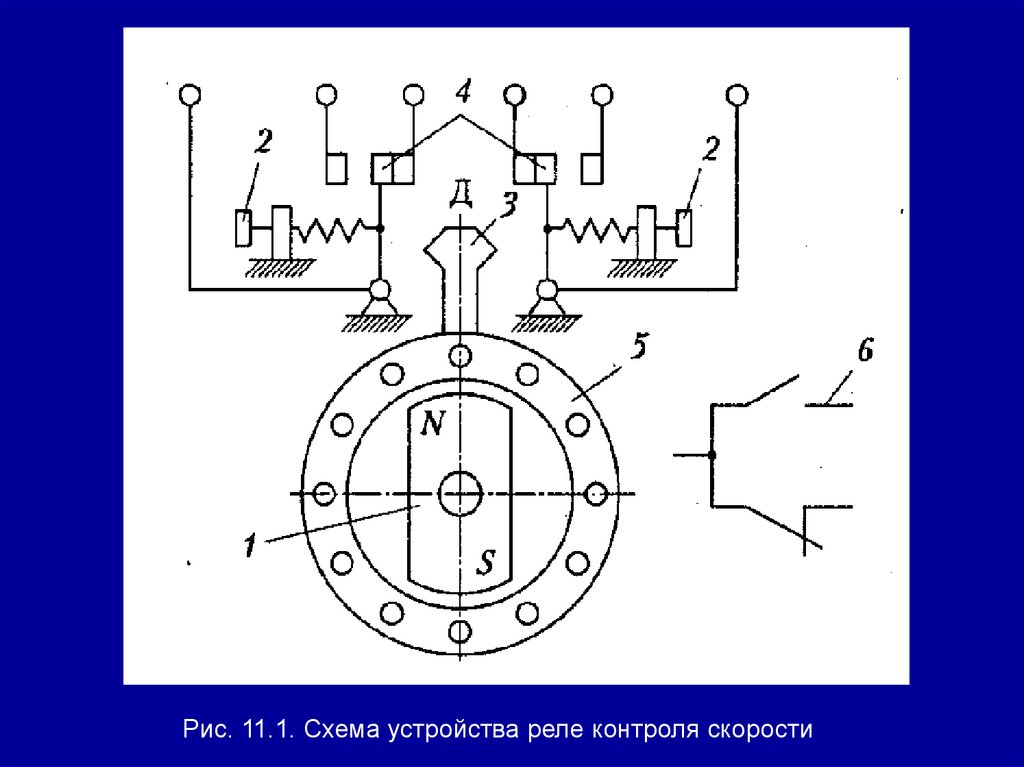
12.1. Электромеханическое реле контроляскорости (РКС).
Работает по принципу асинхронного двигателя.
Ротор реле (рис. 11.1.) представляет собой
постоянный магнит 1, соединенный с валом
двигателя, скорость которого измеряется.
Постоянный магнит помещен внутри
алюминиевого цилиндра 5, имеющего
обмотку в виде беличьей клетки.
Цилиндр может поворачиваться вокруг оси на
небольшой угол и переключать при этом с
помощью упора 3 контакты 4(6).
106.
Электромеханическое реле контроля скорости (РКС).107.
Рис. 11.1. Схема устройства реле контроля скорости108.
При неподвижном двигателе упор занимаетсреднее положение и контакты реле
находятся в «нормальном» положении.
При вращении двигателя и тем самым магнита
1 уже при небольших скоростях на цилиндр 5
начинает действовать вращающий момент,
под влиянием которого он поворачивается и
обеспечивает с помощью упора 3
переключение контактов 4.
При скорости двигателя, близкой нулю, цилиндр
возвращается в среднее положение и
контакты 4 переходят в свое «нормальное»
состояние.
109.
Величина скорости, при которойпереключаются контакты реле, определяется
положением настроечных винтов 2
110. Занятие №13 (2 часа) Емкостный датчик положения
111.
Емкостный датчикположения представляет
собой устройство,
чувствительным
элементом которого
является электрический
конденсатор.
Сила тока в цепи
датчика определяется
формулой:
112.
т.е сила тока вцепи датчика (при неизменном значении
напряжения ) зависит только от
величины емкости конденсатора.
113.
Где: хc - емкостное сопротивлениедатчика
U - напряжение на входе датчика
I - сила тока в цепи датчика
Емкостное сопротивление зависит от частоты
тока и емкости конденсатора:
Где: f = 50 Гц - промышленная частота тока
π = 3,14
С - емкость конденсатора датчика ( Ф)
114.
Электрическийконденсатор
представляет
устройство,
состоящее из
двух
параллельных
металлических
пластин
разделенных
диэлектриком.
115.
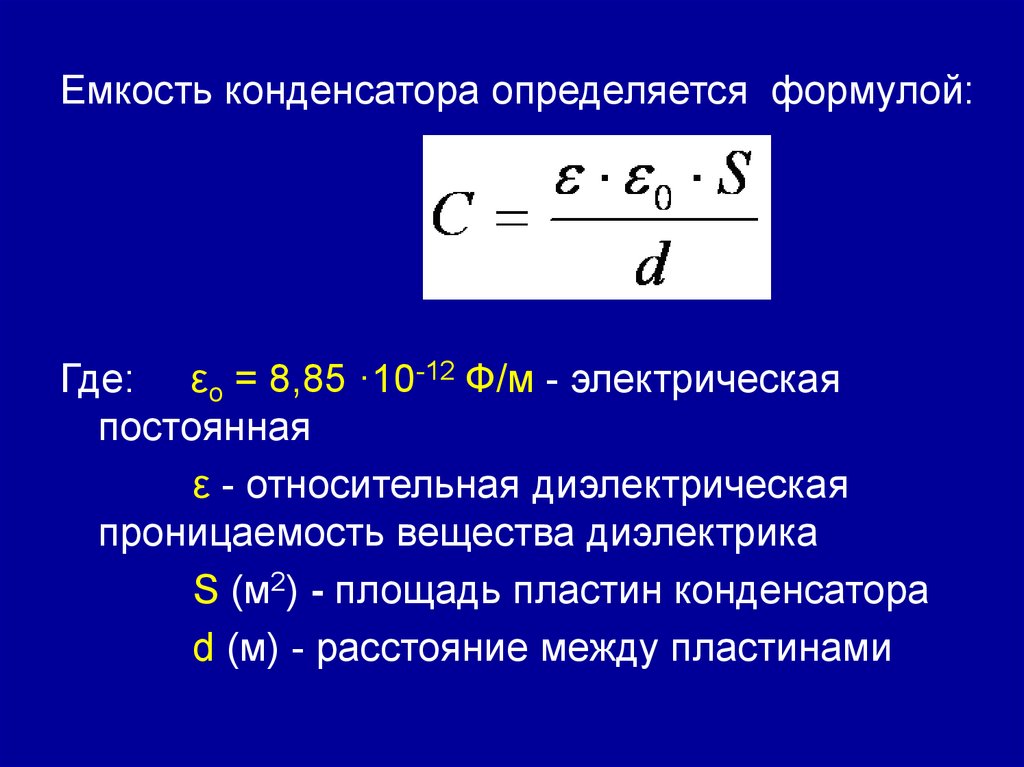
Емкость конденсатора определяется формулой:Где: εо = 8,85 ·10-12 Ф/м - электрическая
постоянная
ε - относительная диэлектрическая
проницаемость вещества диэлектрика
S (м2) - площадь пластин конденсатора
d (м) - расстояние между пластинами
116.
Относительная диэлектрическаяпроницаемость показывает какое вещество
находится между пластинами конденсатора.
Меняя вещества между пластинами можно
изменять емкость конденсатора и
контролировать этот процесс по изменению
тока в цепи емкостного датчика.
Точно также при изменении площади пластин
S и расстояния между ними d изменяется
емкость конденсатора С и соответственно ток
в цепи емкостного датчика.
117.
Емкостный датчикс изменяемой площадью пластин
118.
Емкостный датчикс изменяемым
диэлектриком
119.
Емкостный датчик с изменяемымрасстоянием между пластинами
120. Занятие №14 (2 часа) Индуктивные датчики положения
121.
Сила тока в цепииндуктивного датчика
определяется формулой:
Где: I (A) - сила тока в
цепи датчика
U(В) - напряжение на
входе датчика
хL( Oм) -
индуктивное
сопротивление
122.
Индуктивное сопротивление зависит отчастоты тока и индуктивности катушки
Где: f = 50 Гц - промышленная частота
тока
L (Гн) - индуктивность катушки
тогда:
123.
Таким образом изменениеиндуктивности катушки
приводит
к изменению силы тока в цепи
индуктивного датчика.
124.
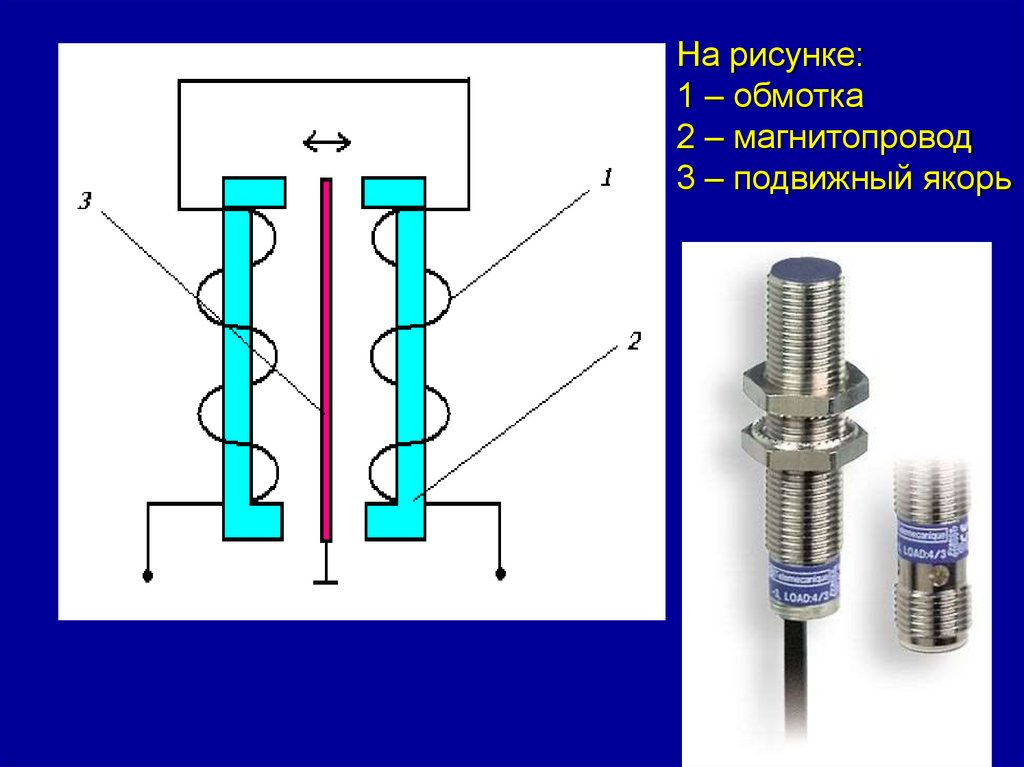
Индуктивные датчики используются дляизмерений небольших перемещений
(неровностей на поверхностях обработки).
Основной частью чувствительного элемента
индуктивного датчика является
магнитопровод с установленной на него
катушкой.
Магнитопровод имеет подвижный якорь,
перемещение которого изменяет
индуктивное сопротивление датчика и,
соответственно, силу тока в его цепи.
125.
На рисунке:1 – обмотка
2 – магнитопровод
3 – подвижный якорь
126. Занятие №15 (2 часа) Тензодатчики
127.
15.1. Общие определения.Тензометрические датчики служат для измерения
деформаций в деталях машин и механизмов.
Они могут также использоваться для измерения
других механических величин
(давления, вибрации, ускорения и др.), которые
предварительно преобразуются в деформацию.
Работа тензодатчиков основана на изменении
активного сопротивления материала при его
механической деформации.
В качестве материала тензодатчиков
используются проводники (в виде проволоки,
фольги или пленки) и полупроводники.
128.
15.2. Устройство и установка проволочныхтензодатчиков
Устройство наиболее распространенного
проволочного тензодатчика показано
на рис. 15.1. На полосу тонкой прочной бумаги
наклеена уложенная зигзагообразно тонкая
проволока. К концам проволоки с помощью
пайки или сварки присоединены выводы из
медной фольги, с помощью которых датчик
подключен в измерительную цепь. Сверху
проволока также защищена от внешних
воздействий тонкой бумагой.
129.
Тензодатчик приклеивают к испытуемой детали,благодаря чему деформацию детали
воспринимает проволочная решетка.
Рис. 15.1. Проволочный
наклеиваемый тензодатчик
130.
15.3. Фольговые, пленочные, угольные иполупроводниковые тензодатчики
Фольговые тензодатчики изготовляют
методом фотохимического травления.
Решетка такого датчика выполняется из
разных сплавов (медь с никелем,
серебро с золотом и др.), которые
обеспечивают достаточную
чувствительность и в то же время
имеют надежное сцепление с
изоляционной основой, на которой
выполняется датчик.
131.
Пленочные тензодатчики изготовляютпутем напыления слоя германия,
теллура, висмута или сульфида свинца
на эластичное изоляционное основание
из слюды или кварца.
В отличие от проволочных, фольговые и
пленочные тензодатчики имеют решетку
не круглого, а прямоугольного сечения с
очень большим отношением ширины к
высоте. По сравнению с проволочными
они имеют ряд преимуществ.
132.
Рис. 15.2. Фольговые тензодатчики133.
Для измерения механических усилий инапряжений используются и угольные
датчики.
Их работа основана на зависимости
активного сопротивления угольных (или
графитовых) контактов от силы
контактного сжатия.
Устройство угольного датчика показано
на рис. 15.3.
134.
Угольные диски 3 зажимаются междуприжимным винтом 6 и упором 5,
воспринимающим измеряемое усилие F.
Давление на угольные диски 3
передается через металлические диски
1, изоляционные прокладки 4 и медные
прокладки 2, имеющие выводы для
включения датчика в измерительную
схему.
135.
Рис.15.3. Угольный тензодатчикF - Измеряемое усилие
1 - Металлические диски
2 - Медные прокладки
3 - Угольные диски
4 - Изоляционные прокладки
5 - Упор
6 - Прижимной винт
136.
В полупроводниковых тензодатчикахиспользуются кристаллические
полупроводниковые материалы.
Наиболее заметен тензоэффект в таких
полупроводниках, как германий Ge, кремний Si,
соединения индия In, галлия Ga.
Чувствительность полупроводникового
тензодатчика зависит от ориентировки действия
сил (кристаллографического направления).
Влияют на чувствительность также наличие
примесей и температура.
137.
Тензодатчики138. Занятие №16 (2 часа) Трансформаторные датчики
139.
Принцип действия трансформаторных датчиковоснован на изменении коэффициента
взаимоиндукции обмоток при перемещении
якоря. На рис. 16.1. показан
трансформаторный датчик с подвижным
якорем.
Обмотка возбуждения w1 питается
напряжением U1 которое создает в
магнитопроводе переменный магнитный
поток Ф.
Во вторичной обмотке w2 индуцируется ЭДС
значение которой зависит от величины
воздушного зазора δ.
140.
Рис. 16.1.Трансформаторный датчик
с подвижным якорем.
141.
Максимальная ЭДС Е2 получается при δ = 0,поскольку при этом магнитное сопротивление
замкнутого магнитопровода минимально и по
нему проходит максимальный магнитный
поток Ф.
С увеличением δ уменьшаются магнитный
поток и соответствующая ему ЭДС Е2.
Такой датчик используется для измерения
малых линейных перемещений, он имеет
серьезный недостаток: зависимость ЭДС Е2
от перемещения якоря х нелинейна и не
проходит через нуль.
142.
На рис. 16.2. показан трансформаторныйдатчик с поворотной обмоткой.
Магнитопровод датчика неподвижен и состоит
из ярма 1 и сердечника 2.
Обмотка возбуждения w1 размещена на ярме 1,
запитана переменным напряжением U1 и
создает в зазоре между ярмом 1 и
сердечником 2 переменный магнитный поток
Ф, амплитудное значение которого
неизменно.
143.
Рис. 16.2.Трансформаторный
датчик с поворотной
обмоткой
144.
В зазоре с равномерным распределениеминдукции размещена поворотная рамка 3
вторичной обмоткой w2 в которой
индуцируется ЭДС Е2, являющаяся выходным
сигналом датчика.
В зависимости от угла поворота α Е2
изменяется от нуля (при α = 0 плоскость
рамки размещена вдоль направления
магнитного потока) до максимального
значения (при α = 90° плоскость рамки
размещена поперек направления магнитного
потока, весь магнитный поток сцеплен с
витками вторичной обмотки w2).
145. Занятие №17 (2 часа) Пьезодатчики
146.
17.1. Принцип действия пьезодатчиков.Работа пьезоэлектрического датчика основана
на физическом явлении, которое называется
пьезоэлектрическим эффектом.
Этот эффект проявляется в некоторых
кристаллах в виде появления на их гранях
электрических зарядов разных знаков при
сжатии кристалла в определенном
направлении. В зависимости от значения
силы сжатия (или растяжения) меняется
количество зарядов, а следовательно, и
разность потенциалов, замеренная между
гранями.
147.
Широко известны пьезоэлектрическиезвукосниматели: игла звукоснимателя
воспринимает все изменения глубины
звуковой дорожки и передает их на
пьезокристалл. Выходное напряжение с пьезокристалла усиливается, и через динамик
мы слышим записанные звуки.
Появление зарядов на гранях в зависимости от
сжатия называется прямым пьезоэффектом.
Существует и обратный пьезоэффект: при
подаче напряжения на грани кристалла
изменяются его размеры (он сжимается или
разжимается).
148.
Основанные на прямом пьезоэффектепьезоэлектрические датчики используются в
автоматике для измерения давлений,
вибраций, ускорений, других параметров
быстропротекаюших процессов.
17.2. Устройство пьезодатчиков
Пьезоэлектрические датчики применяются для
измерения давления, силы, ускорения. На
рис. 17.1. показано устройство
пьезоэлектрического датчика давления с
двумя кварцевыми пластинами.
149.
Измеряемое давление действует на мембрану1, представляющую собой дно корпуса
датчика. Кварцевые пластины 2 зажаты
между металлическими прокладками 3.
Средняя прокладка 3 соединена с выводом 4,
проходящим через экранированную втулку 5
из изоляционного материала. Крышка 6
соединяется с корпусом и через шарик 7
передает давление пластинам, благодаря
чему измеряемое давление распределяется
по поверхности кварцевых пластин более
равномерно.
150.
Рис.17.1.Пьезоэлектрический датчик
давления.
1
2
3
4
5
6
7
- Мембрана,
- Кварцевые пластины
- Металлические прокладки
- Выводы
- Экранированная втулка
- Крышка
- Шарик
151.
Кварцевые пластины обычно расположенытаким образом, что в измерительную схему
подается отрицательный потенциал.
Положительный потенциал подается на
корпус датчика. Для уменьшения утечки
зарядов необходима очень качественная
изоляция.
С этой же целью поверхность кварцевых
пластин тщательно полируют. Использование
двух (а иногда и больше) пластин повышает
выходную ЭДС, поскольку выходные сигналы
пластин складываются.
152. Занятие №18 (2 часа) Термоэлектрические датчики
153.
18.1. Принцип действия термоэлектрическихдатчиков
Работа термоэлектрических датчиков
основана на одном из термоэлектрических
явлений — появлении
термоэлектродвижущей силы (термоЭДС).
Сущность этого явления заключается в
следующем. Если составить электрическую
цепь из двух разнородных металлических
проводников (или полупроводников), причем
с одного конца проводники спаять, а место
соединения (спай) нагреть, то в такой цепи
возникает ЭДС.
154.
Эта ЭДС будет пропорциональна температуреместа спая (точнее — разности температур
места спая и свободных, неспаянных концов).
Коэффициент пропорциональности зависит
от материала проводников и в определенном
интервале температуры остается
постоянным.
Цепь, составленная из двух разнородных материалов, называется термопарой;
проводники, составляющие термопару,
называются термоэлектродами; места
соединения термоэлектродов— спаями.
155.
Спай, помещаемый в среду, температурукоторой надо измерить, называется горячим
или рабочим. Спай, относительно которого
измеряется температура, называется
холодным или свободным.
Возникающая при различии температур
горячего и холодного спаев ЭДС называется
термоЭДС. По значению этой термоЭДС
можно определить температуру.
156.
Рис.18.1. Термопара исхема ее включения
1 – горячий спай
2,3 – холодные спаи.
mV – милливольтметр
157.
Для измерения термоЭДС, вырабатываемойтермопарой, в цепь термопары включают
измерительный прибор (например,
милливольтметр).
Милливольтметр включают, разомкнув
свободный спай (рис. 18.1.)
В случае разомкнутого свободного спая
(рис. 18.1.) у термопары три спая:
один горячий 1 и два холодных 2 и 3, которые
должны иметь постоянную температуру.
158.
159. Занятие №19 (2 часа) Струнные датчики.
160.
19.1. Назначение и принцип действияПринцип действия струнного датчика основан
на зависимости собственной частоты
колебаний натянутой струны длиной l и
массой m от силы натяжения F.
Струнные датчики используются в приборах
для измерения силы, давления, расхода,
температуры и др.
Струнный датчик (рис. 19.1) состоит из струны
1, возбудителя 2 и приемника 3.
Одним концом струна жестко закреплена, а
другим концом соединена с первичным
преобразователем, например мембраной 4.
161.
При изменении давления Р изменяется силанатяжения струны. С помощью возбудителя 2,
которым может быть электромагнит, струна
выводится из состояния равновесия и
начинает колебаться с частотой f,
определяемой давлением Р.
Приемник 3 преобразует перемещение струны
с частотой f в электрический сигнал такой же
частоты. В качестве приемника 3 может
использоваться индуктивный, емкостный или
любой другой датчик. На практике чаще всего
применяют электромагнитный датчик.
162.
Рис. 19.1. Струнный датчикдля измерения давления.
1 – струна
2 – возбудитель
3 – приемник
4 – мембрана
163. Занятие №20 (2 часа) Фотоэлектрические датчики
164.
20.1. Назначение. Типы фотоэлектрическихдатчиков
Фотоэлектрические датчики реагируют на
изменение освещенности.
Как правило, фотоэлектрический датчик
состоит из источника и приемника светового
потока (ПСП).
Источником светового потока может быть сам
объект измерения или специальный
осветитель (например, в виде обычной
лампы накаливания).
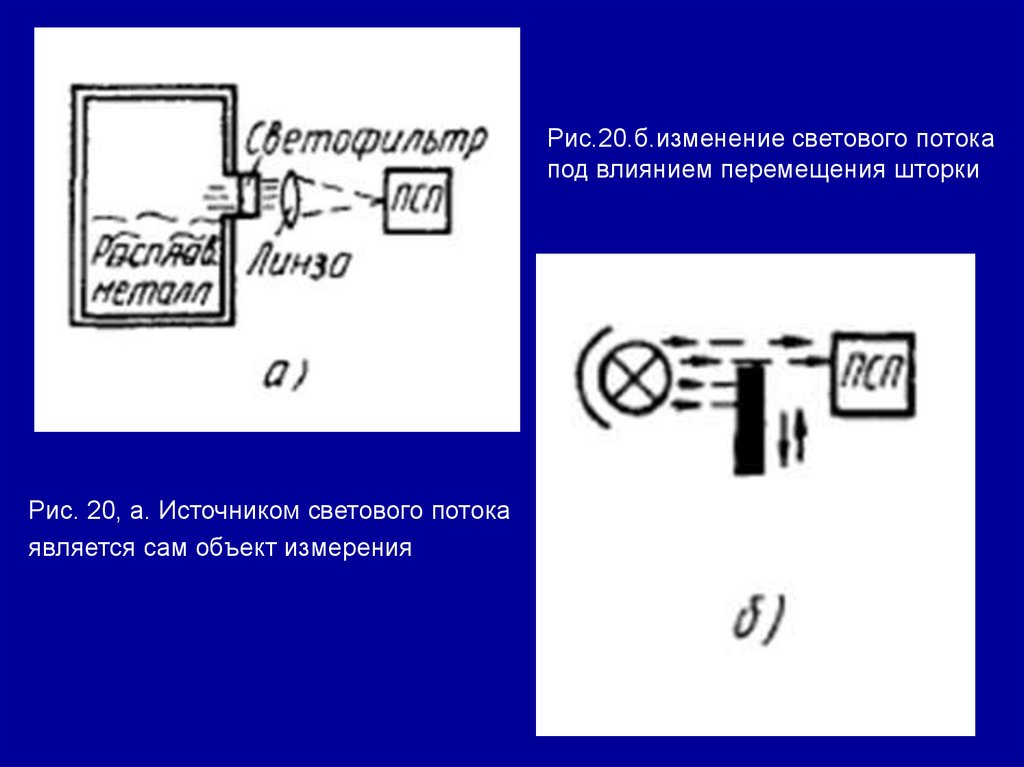
165.
По световому потоку, исходящему отраскаленного или расплавленного металла,
фотоэлектрический пирометр автоматически
измеряет температуру.
В данном случае источником светового потока
является сам объект измерения (рис. 20, а).
Однако чаще используются лампы, создающие
постоянный световой поток, а его изменение
происходит под влиянием перемещения шторки
(рис. 20.б), прохождения света через
контролируемую среду (рис. 20, в), под влиянием
свойств контролируемого объекта, от которого
отражается световой поток (рис. 20, г).
166.
Рис.20.б.изменение светового потокапод влиянием перемещения шторки
Рис. 20, а. Источником светового потока
является сам объект измерения
167.
Рис.20.г. Измерение свойствконтролируемого объекта,
от которого отражается световой поток
Рис.20.в. Измерение света
при прохождении через
контролируемую среду.
168.
В соответствии с этими возможнымивариантами изменения светового потока с
помощью фотоэлектрических датчиков можно
измерять перемещение и подсчитывать
число предметов, определять уровень,
прозрачность, задымленность, цвет
различных материалов, оценивать качество
обработанной поверхности (блеск,
шероховатость, окраска).
В приемниках светового потока
фотоэлектрических датчиков используется
фотоэффект.
169.
Под фотоэффектом понимают изменениесвойств материала при изменении его
освещенности. Различают внешний,
внутренний и вентильный фотоэффект.
Внешний фотоэффект состоит в том, что под
влиянием потока излучения электроны
вылетают из катода электронной лампы и ток
эмиссии зависит от освещенности катода.
Внутренний фотоэффект проявляется в том,
что активное сопротивление
полупроводникового материала зависит от
его освещенности.
170.
При вентильном фотоэффекте между слоямиосвещенного проводника и неосвещенного
полупроводника, разделенных тонким
изоляционным слоем, возникает ЭДС,
которая зависит от освещенности.
20.2. Приемники излучения
фотоэлектрических датчиков
К приемникам излучения на основе внешнего
фотоэффекта относятся электровакуумные
или газонаполненные фотоэлементы,
фотоэлектронные умножители и передающие
электронно-лучевые трубки.
171.
К приемникам излучения на основе внутреннегофотоэффекта относятся фоторезисторы,
фотодиоды и фототриоды.
На рис. 20.2
приведена схема
включения вакуумного
фотоэлемента.
Анод А и катод К
фотоэлемента
находятся в
стеклянном баллоне,
из которого
Рис. 20.2 схема включения
откачан воздух.
вакуумного фотоэлемента
172.
Когда световой поток падает на катод,покрытый активным слоем, электроны
получают энергию, позволяющую им
вылететь из катода.
Это явление называется
фотоэлектронной эмиссией.
Под действием источника питания с ЭДС
Е между катодом и анодом создается
электрическое поле, которое и
заставляет электроны перемещаться от
катода к аноду,
173.
В электрической цепи создается электрическийток, называемый фототоком. Когда действие
света прекращается, ток в фотоэлементе и
внешней электрической цепи исчезает.
174. Занятие №21 (2 часа) Ультразвуковые датчики
175.
21.1. Принцип действия и назначениеультразвуковых датчиков
Работа ультразвуковых датчиков основана на
взаимодействии ультразвуковых колебаний с
измеряемой средой.
К ультразвуковым относят механические
колебания, происходящие с частотой более
20000 Гц, т. е. выше верхнего предела
звуковых колебаний, воспринимаемых
человеческим ухом. Распространение
ультразвуковых колебаний в твердых, жидких
и газообразных средах зависит от свойств
среды.
176.
Например, скорость распространения этихколебаний:
для разных газов находится в пределах от 200
до 1300 м/с,
для жидкостей - от 1100 до 2000 м/с,
для твердых материалов - от 1500 до 8000 м/с.
Очень сильно выражена зависимость скорости
колебаний в газах от давления.
177.
Поясним работу ультразвукового датчика напримере эхолота — прибора для измерения
глубины моря (рис. 21.1).
При подаче переменного напряжения на
пьезоэлемент 1 возбуждаются
ультразвуковые колебания, направленные
вертикально вниз.
Отраженный ультразвуковой импульс
воспринимается пьезоэлементом 2.
Электрический прибор 3 измеряет время t
между посылаемым и принимаемым
импульсами.
178.
Глубина моря пропорциональнаэтому времени и скорости
распространения звука v в
воде:
vt
Н
2
Шкала прибора градуируется
непосредственно в метрах.
Рис. 21.1. Эхолот с
ультразвуковым датчиком
179.
С помощью ультразвуковых датчиковобнаруживают дефекты в
металлических деталях: трещины в
изделиях, полости в отливках и т. д.
Ультразвуковые датчики играют важную
роль в дефектоскопии, в
неразрушающих методах контроля.
Кроме того, ультразвуковые датчики
используются в приборах для
измерения расхода, уровня, давления.
180. Занятие №23 (2 часа) Задающие элементы.
181.
12.1. Задатчик ввода заданияК задающим элементам относятся:
• устройства ввода задания (задатчики
скорости, силы тока и т.д.)
• задатчики интенсивности.
По виду сигналов задающие элементы делятся
на аналоговые и цифровые.
Простейшими задающими элементами
являются потенциометрические. Для
электропривода с малым диапазоном
скорости используется один потенциометр
(рис. 12.1), с большим — два (рис. 12.2).
Потенциометр R1 служит для грубого задания
скорости, R2 — для точного.
182.
Рис.12.1. Потенциометрическийзадатчик скорости.
Рис.12.2. Потенциометрический
задатчик скорости с точным заданием
183.
Для повышения точности задания скоростизадающие элементы питаются
стабилизированным напряжением.
Перемещая движки потенциометров R1 и R2
можно задавать величину управляющего
напряжения, подаваемого на элементы
электропривода.
Современные системы регулирования могут
строится и на бесконтактных элементах
управления.
184.
12.2. Задатчики интенсивности.Задатчик интенсивности формирует
динамические характеристики
электропривода по каналу управления,
задавая время разгона и время торможения.
Например, с помощью потенциометрического
задатчика (см.рис.12.1.) задается входное
напряжение схемы управления
электроприводом. Это значит, что движок
потенциометра R1 должен находиться в
определенном положении. Если требуется по
условиям технологического процесса плавно
изменять скорость, движок потенциометра
185.
должен перемещаться в соответствии спрограммой.
При пропорциональном регулировании
зависимость между скоростью перемещения
движка и скоростью вращения
электропривода графически выражается
прямой линией (см. рис. 12.3.)
Из графика видно: чем меньше угол наклона
прямой (прямая 2), тем больше при одном и
том же перемещении движка будет
изменяться скорость электропривода. То есть
возрастает интенсивность работы
электропривода.
186.
Рис.12.3. Графики задания скорости электропривода:1 – низкая интенсивность; 2 – высокая интенсивность.
187.
Функцию изменения динамическойхарактеристики электропривода (то есть
ускорения электропривода) выполняет
задатчик интенсивности.
В нашем примере задатчик изменяет наклон
характеристики регулятора, увеличивая или
уменьшая разгон электропривода.
Изменение интенсивности может происходить и
при торможении электропривода.
Задатчик интенсивности может быть
реализован в релейно-контактных системах
управления с помощью временных реле, а в
электронных системах с помощью частотных
преобразователей.
188. Занятие №23 (2 часа) Контрольная работа №2
189. Тема №3. Замкнутые системы управления электрическим приводом.
190. Занятие №24 (2 часа) Классификация замкнутых автоматических систем по принципу управления
191.
Замкнутые системы электроприводаклассифицируются по следующим признакам:
• по принципу действия,
• по выходному регулируемому параметру
• по выполняемым функциям.
24.1. Классификация по принципу
действия
По принципу действия системы регулирования
автоматизированных электроприводов
классифицируются следующим образом.
1. Системы электропривода с непрерывным
управлением.
192.
2. Системы электропривода с релейнымуправлением.
3. Системы электропривода с импульсным
управлением.
4. Системы электропривода с цифровым
(например, микропроцессорным)
управлением.
24.2. Системы электропривода с непрерывным
управлением
Это такие системы, в которых каждый из
переменных управляющих параметров
(координат) непрерывно изменяется во
времени или остается постоянным.
193.
Соответственно непрерывно измеряется иподается в систему управления информация
о контролируемых параметрах, в
соответствии с которой осуществляется
непрерывное воздействие на приводной
двигатель. Функциональная схема такой
системы соответствует рис. 24.1.
На рисунках приняты следующие обозначения:
П -управляемый преобразователь,
М - двигатель, Ред - редуктор, РО - рабочий орган,
Peг - регулятор, ИПУ - информационнопреобразовательное устройство,
fMc - возмущение по моменту сопротивления на валу
двигателя.
194.
Рис. 24.1. Функциональная схема системыэлектропривода с непрерывным управлением
195.
В замкнутой системе регулирования сигналуправления U формируется из сигнала
задания Хз и сигнала отрицательной
обратной связи Z, несущего информацию о
фактическом значении регулируемого
параметра Y, которое зависит от возмущений,
действующих на узлы системы и рабочий
орган электропривода.
В результате введения обратной связи ошибка
регулирования уменьшается до допустимого
значения.
196.
Сигнал управления U системы электроприводас обратной связью представляет собой
отклонение (ошибку) регулирования
относительно сигнала задания Х3.
При этом ни одно из возмущений не
измеряется, а их влияние на регулируемый
параметр воспринимается системой по
каналу обратной связи. Следовательно, в
системах с отрицательной обратной связью
по выходному параметру реализуется
управление по отклонению.
197.
Обратная связь представляет собой каналпередачи и преобразования информации с
выхода системы регулирования или ее узлов
на вход с целью формирования
результирующего сигнала управления.
Уравнение сигнала управления U=Xj ± Z.
В зависимости от знака сигнала Z обратная связь
бывает положительной или отрицательной.
Если сигнал обратной связи Z суммируется с
сигналом задания Х3, то обратная связь
называется положительной. Если сигнал
обратной связи Z вычитается из сигнала Х3, то
обратная связь называется отрицательной.
198.
24.3. Системы электропривода с релейнымуправлением
Это системы, у которых в прямом канале
регулирования для управления
электродвигателем имеется силовой
релейный элемент РЭ с двумя устойчивыми
состояниями:
• Uвых = + Uпит, если Uвх > 0;
• Uвых = 0, если Uвх < 0;
Функциональная схема замкнутой системы
электропривода с релейным управлением
приведена на рис. 24.2.
199.
Рис. 24.2. Функциональная схема замкнутой системыэлектропривода с релейным управлением
Рис. 24.3. Регулировочная
характеристика релейного элемента:
Реле включено при любом уровне
входного сигнала, кроме нуля
200.
При имеющемся на входе сигнале управленияU= X3 - Z включается реле и ,соответственно,
электродвигатель и рабочий орган
механизма. Работа электродвигателя
продолжается до тех пор, пока сигнал
отрицательной обратной Z связи не станет
равным сигналу задания X3 (Z= X3).
При этом сигнал управления U= X3 - Z.
становится равным нулю U= X3 – Z= Z – Z=0.
201.
24.4. Системы электропривода с импульснымуправлением.
Это системы, в составе которых в прямой цепи
регулирования имеется импульсный элемент,
преобразующий непрерывный сигнал в
непрерывную последовательность импульсов
с определенными характеристиками.
Наиболее распространен в системах
электропривода широтно-импульсный
преобразователь (ШИМ), который формирует
последовательность импульсов с переменной
длительностью и с постоянными периодом и
амплитудой.
202.
Принцип действия широтно-импульсногомодулятора (преобразователя)
заключается в создании на выходе модулятора
меняющихся по длительности (ширине)
импульсов в зависимости от амплитуды
входного сигнала. (см. рис.24.4.)
На графике видно, что чем больше амплитуда
входного сигнала, тем больше ширина
прямоугольного импульса на выходе ШИМ.
Достоинство ШИМ – возможность
использования цифровых кодов для
управления электроприводом.
203.
Рис.24.4. Принцип действия широтно-импульсного модулятораЖелтая линия – график входного сигнала
Красные – прямоугольные импульсы с выхода ШИМ.
204.
С помощью ШИМ можно создать несложныйЦАП (цифро-аналоговый преобразователь) —
устройство для преобразования цифрового
(обычно двоичного) кода в аналоговый сигнал
(ток, напряжение)
С помощью задания длительности импульсов
можно менять среднее напряжение на
выходе ШИМ и, следовательно управлять
скоростью вращения электропривода.
205.
24.5. Цифровые системы регулирования - этотакие системы, в которых информация о
переменных преобразуется в цифровой код.
Цифровые системы в настоящее время
создаются на базе микропроцессоров,
реализующих в цифровой форме функции
регулятора и информационнопреобразовательного устройства ИПУ.
206. Занятие №25 (2 часа) Автоматические системы регулирования момента (усилия).
207.
По типу выходной регулируемойкоординаты замкнутые системы
электропривода подразделяются на
следующие группы.
• Системы регулирования момента
(усилия).
• Системы регулирования скорости.
• Системы регулирования положения
рабочего органа.
208.
25.1. Системы регулирования момента(усилия).
К этому классу относятся, например,
электроприводы систем натяжения металла в
листопрокатном производстве в металлургии
или системы натяжения пленки в химикотехнологическом производстве тонких
пленок.
Закон регулирования момента (усилия)
рабочего органа определяется
технологическим процессом.
209.
Для примера рассмотрим процесс измеренияусилия натяжения бумажной ленты при
намотке рулонов.
Плавающие валики (см. рис. далее)
устанавливаются на качающихся,
перемещающихся линейно или ротационных
опорах. При изменении натяжения ленты
валик отклоняется от нулевой позиции,
компенсируя отклонение натяжения.
Измерение отклонения (позиции) валика
позволяет, скорректировав параметры
привода лентоведущих валиков и рулонов,
нормализовать величину натяжения.
210.
Рис 25.1.Система контроляплавающего валика
c механическим датчиком
Рис 25.2. Тензометрическая система
контроля натяжения
211.
Для определения позиции валика в старыхсистемах использовались аналоговые
потенциометры (рис 25.1.)
Поскольку эти приборы содержат механические
элементы и их точность со временем
уменьшается.
В тензометрических системах контроля
(рис 25.2.) датчики подключаются к
направляющему валику и измеряют нагрузку
на него, обусловленную натяжением полотна.
После сравнения измеренного значения с
заданным при необходимости выполняется
коррекция параметров приводов
лентоведущих валиков и рулонов.
212.
Достоинства тензометрических систем:высокая точность измерения; универсальность;
компенсация всех факторов, влияющих на
натяжение ленты; большой выбор моделей
разной стоимости, включая системы с
автоматической калибровкой; простота
установки.
Однако при работе с рулонами большого
диаметра системы этого типа не всегда
обеспечивают достаточную стабильность
натяжения в устройствах размотки и намотки.
213. Занятие №26 (2 часа) Автоматические системы регулирования скорости и положения рабочего органа.
214.
26.1. Системы регулирования скорости.используются в электроприводах многих
технологических машин:
металлообрабатывающих станках, прокатных
станах и многих других.
Системы регулирования скорости делятся на
две большие группы.
26.1.1. Системы стабилизации скорости.
В этих системах скорость поддерживается
постоянной, несмотря на воздействие
возмущений.
К таким системам относятся, например
электроприводы бумагоделательных машин.
215.
26.1.2. Системы управления скоростью.В этих системах скорость рабочего органа
регулируется с высокой точностью в
широких пределах в соответствии с
требуемым характером протекания
технологического процесса.
Это, например, электроприводы экскаваторов,
подъемно-транспортных машин и другие.
216.
Рис.26.1. Система программного регулированияскорости вращения рабочего органа шпинделя.
ОВ ЭМУ – обмотка возбуждения ЭМУ.
ЭМУ - электромагнитный усилитель.
Д - двигатель постоянного тока
ОВД – обмотка возбуждения двигателя.
Р – редуктор. ТГ – тахогенератор. У – электронный усилитель.
E - ошибка рассогласования. V - скорость изменения напряжения.
М – момент инерции шпинделя.
217.
Система регулирования работает следующимобразом: с электронного усилителя У
усиленный сигнал рассогласования Е
поступает на обмотку возбуждения ЭМУ (ОВ
ЭМУ), ток, проходящий через ОВ ЭМУ
меняется, изменяя тем самым величину
магнитного потока, действующего на ротор
электромагнитного усилителя (ЭМУ) увеличивая или уменьшая скорость его
вращения, и в зависимости от этих
изменений меняется скорость и направление
вращения двигателя (Д).
218.
Двигатель (Д), редуктор (Р), тахогенератор (ТГ)и шпиндель находятся в жесткой
механической связи, поэтому изменения в
скорости и в направлении вращения
двигателя вызывают соответствующие
изменения в скорости и в направлении
вращения рабочего органа шпинделя, а также
в работе тахогенератора (ТГ), который
передвигает ползунок реостата в сторону
изменения ошибки несогласования E.
219.
26.2. Системы регулирования положениярабочего органа.
Эти системы используются в электроприводах
нажимных винтов прокатных станов, в
роботах и манипуляторах и многих других
промышленных установках.
В этих системах положение рабочего органа
регулируется с заданной точностью в
соответствии с требованиями
технологического процесса.
220.
Существует два типа замкнутых системэлектропривода регулирования положения системы позиционирования и следящие
системы.
Системы позиционирования - это такие
системы, в которых задается исходное и
конечное положение рабочего органа, а
параметры перемещения не контролируются.
Следящие системы электропривода - это
системы регулирования положения, в
которых задается и непрерывно
отрабатывается с заданной точностью вся
траектория движения рабочего органа.
221.
Следящие электроприводы или системыуправления положением представляют собой
замкнутые электроприводы, управляющие
перемещением и обеспечивающие
стабилизацию положения объекта
регулирования относительно некоторой
базовой системы координат.
При этом регулируемая величина (положение
объекта) с той или иной степенью точности
должна соответствовать приложенному к
системе управляющему воздействию.
222.
Следящие электроприводы могут обеспечиватькак линейное, так и угловое перемещение
регулируемого объекта.
Например, это может быть система наведения
солнечной батареи, телескопа и др. или
система управления подачей резца в станке с
программным управлением.
223.
Функциональная схема привода представленана рис. 25.3, :
РП – регулятор положения;
РС – регулятор скорости;
РТ – регулятор тока;
Д – двигатель;
ОР – объект регулирования;
ДП, ДС, ДТ – датчики соответственно
положения, скорости и тока.
224.
Рис. 26.2. Функциональная схема системырегулирования положения рабочего органа.
225.
Как видно из рис. 26.2. электропривод содержиттри контура регулирования: положения,
скорости и тока.
Внутренние контуры регулирования (скорости и
тока) строятся, как это было показано при
рассмотрении систем регулирования
скорости.
Внешний контур содержит датчик положения
объекта относительно базовой системы
координат. Это может быть датчик углового
положения или любой датчик линейного
перемещения.
226.
Сигнал с выхода ДУ сравнивается суправляющим сигналом U0, определяющим
положение объекта.
По результату сравнения РП – вырабатывается
сигнал Uрс регулирования скорости, который,
в конечном счете, обеспечивает вращение
двигателя и перемещение ОР – на заданный
угол или расстояние.
В следящем электроприводе различают два
режима работы: позиционирования и
слежения.
227.
В режиме позиционирования привод долженобеспечить перемещение рабочего органа из
одного исходного положения в другое за время
не больше заданного.
Такое требование выдвигается, например, для
привода рулевой машины. При этом
траектория перемещения чаще всего не имеет
значения.
В режиме слежения привод должен обеспечить
перемещение рабочего органа в соответствии с
управляющим воздействием, изменяющимся
по произвольному закону, при ошибке, не
превышающей заданного значения.
228. Занятие №27 (2 часа) Принципы построения систем управления автоматизированным электроприводом
229.
Проведем систематизацию знаний, полученныхна занятиях 1 – 26.
С давних времён человек стремился заменить
тяжёлый физический труд, который являлся
источником механической энергии (МЭ), на
работу механизмов и машин.
Для этого на транспорте и на
сельскохозяйственных работах, на мельницах
и оросительных системах он использовал
мускульную силу животных, энергию ветра и
воды, а позже – химическую энергию
топлива.
230.
Так появился привод – устройство, состоящееиз трёх существенно различных частей:
• двигателя (Д),
• механического передаточного устройства
(МПУ)
• технологической машины (ТМ).
Назначение двигателя: преобразование
энергии различных видов в механическую
энергию.
Механическое передаточное устройство (МПУ)
предназначено для передачи механической
энергии от двигателя к технологической
машине.
231.
Оно не влияет на количество передаваемоймеханической энергии МЭ (без учёта потерь),
но может изменять её параметры и для
согласования видов движения выполняется в
виде ременной, цепной, зубчатой или других
механических передач.
В технологической машине механическая
энергия (МЭ) используется для изменения
свойств, состояния, формы или положения
обрабатываемого материала или изделия.
232.
В современных приводах в качестве источникамеханической энергии (МЭ) используются
различные электрические двигатели (ЭД).
Они преобразуют электрическую энергию
(ЭЭ) в механическую (МЭ) и поэтому привод
получил название электропривода (ЭП).
Функциональная схема электропривода
приведена на рис. 27.1. В её состав, кроме
названых элементов, входит управляемый
преобразователь (П), с помощью которого
электрическая энергия (ЭЭ) от сети подаётся
к электродвигателю (ЭД).
233.
Рис. 27.1. Функциональная схема электроприводаИзменяя сигнал управления преобразователем Uу,
можно изменять количество ЭЭ, поступающей от сети к
ЭД. В результате этого будет изменяться количество МЭ,
вырабатываемой двигателем и получаемой ТМ. Это, в
свою очередь, приведёт к изменению технологического
процесса, эффективность которого характеризуется
регулируемой величиной y(t).
234.
Различные типы преобразователей ипринципы их работы будут рассмотрены в
следующих уроках.
Отличительной особенностью современного
электропривода является то, что в нём сигнал
управления преобразователем Uу
формируется специальным автоматическим
управляющим устройством (АУУ) без
непосредственного участия человека.
Такое управление называют автоматическим, а
электропривод – автоматизированным (АЭП).
235.
Систему управления АЭП, как и любую другуюсистему автоматического управления, можно
рассматривать как систему, воспринимающую
и перерабатывающую информацию.
В первом канале формируется информация о
требуемом значении регулируемой величины
q(t) (задающее воздействие).
Во втором канале с помощью датчиков может
быть получена информация о
действительном значении регулируемой
величины y(t) или других величинах,
характеризующих ЭП.
236.
Третий канал может подавать в системууправления информацию о возмущающих
воздействиях fi(t) в виде сигнала xi(t).
В зависимости от количества используемых
каналов информации различают три
принципа построения систем управления
автоматизированным электроприводом:
1) принцип разомкнутого управления;
2) принцип замкнутого управления;
3) принцип комбинированного управления.
237.
Рассмотрим функциональные схемы системуправления АЭП.
Систему управления автоматического
электропривода АЭП, построенную по
принципу разомкнутого управления,
называют разомкнутой системой.
В ней используется только один канал
информации – о требуемом значении
регулируемой величины q(t).
Функциональная схема такой системы
управления приведена на рис. 27.2.
238.
Рис. 27.2 - Функциональная схема разомкнутой системы управления АЭПВ узел суммирования на входе АУУ от КО подаётся
информация о q(t). Автоматическое управляющее
устройство формирует сигнал управления
преобразователем Uy, используя только информацию
о величине задающего воздействия q(t), которое на
вход АУУ подаётся от командного органа (КО).
239.
В результате того, что на каждый элементфункциональной схемы оказывают
влияние возмущающие воздействия fi(t),
количество поступающей к
технологической машине механической
энергии, а значит и ход
технологической операции будут
изменяться.
В результате этого действительное
значение регулируемой величины y(t)
может существенно отличаться от
требуемого значения q(t).
240.
Разность между требуемым и действительнымзначением регулируемой величины в называют
ошибкой управления
Δx(t)= q(t)– y(t).
Разомкнутые системы АЭП применяются в том
случае, если появление ошибки управления не
приводит к существенным потерям в
технологии (уменьшению производительности
ТМ, снижению качества продукции и др.)
241.
В противном случае, когда появление ошибкиуправления значительно снижает
эффективность технологического процесса,
для построения системы управления АЭП
используют принцип замкнутого управления.
Называют такую систему замкнутой.
В ней используются два канала информации:
к информации о требуемом значении
регулируемой величины q(t) добавляется
информация о действительном значении
регулируемой величины y(t).
Функциональная схема такой системы
управления приведена на рис.27.3.
242.
Рис. 27.3 - Функциональная схема замкнутой системы управления АЭП.243.
Информация о действительном значениирегулируемой величины y(t) подаётся в узел
суммирования с помощью главной обратной
связи (ГОС). Говорят, что ГОС «замыкает»
систему управления, соединяя её выход с
входом.
Сигнал ГОС y(t), поступает в узел
суммирования со знаком «–» и поэтому ГОС
называется отрицательной обратной связью.
В узле суммирования в результате
алгебраического (с учётом знака) сложения
сигналов q(t) и y(t) осуществляется
определение величины и знака ошибки
управления Δx(t)= +q(t) – y(t).
244.
Сигнал ошибки поступает на вход АУУ.Благодаря этому АУУ, формируя сигнал
управления преобразователем П на
основании информации о реально
существующем соотношении заданного и
действительного значения регулируемой
величины обеспечивает подачу к ЭД такого
количества электрической энергии ЭЭ, а к
технологической машине механической
энергии МЭ, что ошибка управления может
быть уменьшена до допустимой величины
или сведена к нулю
245.
Кроме ГОС, в системе управления могут бытьразличные внутренние по отношению к ГОС
обратные связи (ВОС).
Они контролируют промежуточные параметры
системы, что улучшает качество процесса
управления.
Систему, содержащую только ГОС, называют
одноконтурной,
а имеющую, кроме ГОС, ещё и ВОС –
многоконтурной.
246.
Анализ полученных ранее знаний посистемам управления электроприводом
показывает, что оказывается
невыясненной роль преобразователя П
в функциональной замкнутой и
разомкнутой системе управления
электроприводом. Ведь на вход
преобразователя подается
электрическая энергия и с его выхода
снимается также электрическая
энергия.
В чем смысл ее преобразования?
247.
Ответ на этот вопрос будет дан наследующих занятиях.
А общий смыл работы данного
преобразователя следующий:
По условиям технологического процесса
возникает необходимость
регулирования скорости вращения вала
технологического механизма, его
ускорения, момента на валу и других
параметров.,
248.
Так как технологический механизм черезредуктор связан с электродвигателем,
то для изменения параметров движения
технологического механизма удобно
регулировать указанные параметры на
валу электродвигателя. Скорость,
ускорение и момент вращения вала
электродвигателя можно изменять
изменяя напряжение, ток, фазу ,
полярность тока на входе
электродвигателя. Эти функции и
выполняет преобразователь.
249. Занятие №28 (2 часа) Принцип регулирования частоты вращения асинхронных двигателей изменением напряжения статора.
250.
Одним из возможных способов регулированиячастоты вращения асинхронных двигателей
является изменение напряжения на зажимах
его статора, при этом частота такого
напряжения постоянна и равна частоте
промышленной сети переменного тока.
На рис. 28.1. приведена функциональная схема
рассматриваемого электропривода. Между
зажимами питающей сети и зажимами
статора асинхронного двигателя включен
преобразователь напряжения, при
использовании которого изменяется
напряжение, подводимое к статору двигателя.
251.
Рис.28.1. Функциональная схемарегулирования частоты вращения
асинхронных двигателей изменением
напряжения статора.
252.
Для ознакомления с принципом действиярегулятора напряжения проанализируем
работу однофазной схемы на рис. 28.2.а.
В схеме на рис. 28.2.а. напряжение U
переменного тока синусоидальной формы
подводится к электрической цепи,
содержащей активное сопротивление Rнг
нагрузки и две параллельные цепочки,
каждая из которых содержит ключ К и
неуправляемый вентиль (диод) В.
253.
рис. 28.2.арис. 28.2.б
254.
Допустим, что ключ К1 может замыкатьсятолько в положительный полупериод
напряжения (участок 0—Т/2 на рис.
28.2.б), а в отрицательный полупериод
(участок Т/2—Т на рис. 28.2.б) он
разомкнут.
Ключ К2 работает аналогичным образом,
но только замкнутое его состояние
возможно в отрицательном
полупериоде, а разомкнутое — в
положительном полупериоде.
255.
Рассмотрим работу схемы приследующих условиях:
в начале каждого положительного
полупериода кривой напряжения U ключ
К1 замыкается и остается замкнутым до
конца этого полупериода, а ключ К2 при
этом разомкнут; в течение каждого
отрицательного полупериода состояние
ключей К1 и К2 изменяется на
противоположное.
256.
При указанных условиях в положительныеполупериоды ток протекает по цепи:
зажим 1—ключ К1 — диод В1 — сопротивление
Rнг— зажим 2,
а в отрицательные полупериоды — по цепи:
зажим 2 — Rнг —В2 —К2 - зажим 1.
В этом случае напряжение U все время приложено к сопротивлению Rнг нагрузки, и
по нему проходит непрерывный
синусоидальный ток. (рис.28.2.б.)
257.
Рассмотрим работу схемы при несколько иныхусловиях:
ключ К1 замыкается не в самом начале
положительного полупериода кривой
напряжения, а внутри его .в некоторый
момент времени t31 после начального
момента;
аналогично ключ К2 замыкается не в начале
отрицательного полупериода, а внутри его в
момент времени t31 + T/2, как показано на
рис. 28.2.в.
258.
рис. 28.2.арис. 28.2.в.
259.
В таких условиях в течение каждогополупериода имеются интервалы времени
0 - t31 и Т/2 - t31+ Т/2, когда ток в нагрузке не
проходит, а напряжение на нагрузке равно
нулю.
Часть синусоиды, показанная на среднем
графике рис. 28.2.в, представляет собой
зависимость напряжений на нагрузке от
времени для данного случая.
260.
На рис. 28.2.г показан случай, когда время t32задержки замыкания ключа К1 больше, чем в
предыдущем случае.
Из приведенных графиков видно, что при
появлении задержки в замыкании ключей К1
и К2 форма напряжения на нагрузке
изменяется, а именно:
из синусоиды как бы «вырезается»
определенная часть, причем при увеличении
времени задержки «вырезаемая» часть также
увеличивается.
261.
рис. 28.2.в.рис. 28.2.д.
рис. 28.2.г.
262.
Форма напряжения на нагрузке приналичии описанного запаздывания
становится несинусоидальной.
Известно, что несинусоидальное
напряжение можно представить как
совокупность нескольких
синусоидальных напряжений, каждое из
которых изменяется с определенной
частотой.
263.
Это положение доказано строго математическии формулируется следующим образом:
Если имеется периодическая кривая
несинусоидальной формы, то она может
быть представлена суммой множества
кривых синусоидальной формы,
причем частота первой из них равна частоте
периодического изменения исходной, кривой,
а частоты всех других выше этой основной
частоты и кратны ей.
264.
Из приведенных рассуждений вытекаетследующий вывод:
кривую напряжения на нагрузке при работе
схемы на рис. 28.2.а. можно разложить на
отдельные синусоидальные составляющие,
причем частота изменения первой из них равна
частоте питающего напряжения, а частоты
других составляющих больше, чем первой.
265.
Причем, при изменении указанного вышевремени запаздывания ключей К1 и К2 в
схеме на рис. 25.2.а. изменяются амплитуды
синусоидальных составляющих напряжений.
Следовательно, при изменении времени
задержки t3, показанного на графиках рис.
28.2. изменяется амплитуда первой
гармоники напряжения на нагрузке.
(рис.28.2.д)
В этом смысле можно сказать, что схема на
рис. 28.2.а. является регулятором
напряжения.
266.
Период задержки замыкания ключей в схеме нарис. 28.2.а. обычно выражают не в секундах,
а в градусах.
Поскольку один период синусоидального
напряжения соответствует 360°, то времени
задержки t3 соответствует пропорциональный
этому времени угол α°, определяемый по
соотношению
t3
360
T
267.
Угол α обычно называется угломрегулирования.
В схеме на рис. 28.2.а. показаны ключи К1 и
К2, которые замыкаются и размыкаются в
определенные моменты времени, и
последовательно с ними включенные диоды
В1 и В2. В действительности такие ключи не
применяются.
Практически широко используются в качестве
коммутирующих элементов тиристоры,
принцип работы которых соответствует
работе ключей и диодов в схеме на рис.
28.2.а.
268. Занятие №29 (2 часа) Системы импульсно-фазового управления.(СИФУ)
269.
29.1. Понятие о тиристореТиристор - это переключающий
полупроводниковый прибор, пропускающий
ток в одном направлении.
Тиристор имеет три вывода, один из которых управляющий электрод, можно сказать,
"спусковой крючок" - используется для
резкого перевода тиристора во включенное
состояние. Тиристор, как и диод, проводит в
одном направлении, проявляя себя как
выпрямитель;
270.
Для открывания тиристора необходимовыполнение двух условий:
• потенциал анода должен превышать
потенциал катода;
• на управляющий электрод необходимо подать
открывающий (управляющий) импульс.
271.
Рис.29.1. Схемавключения двигателя
с помощью тиристорного
регулятора напряжения
272.
В регуляторе напряжения в каждый фазныйпровод включаются встречно - параллельно
два тиристора, один из которых работает
условно в положительный полупериод
напряжения сети, а другой в отрицательный.
Регулирование напряжения на выходе
регулятора осуществляется изменением
времени включения каждого тиристора, путем
подачи на тиристор управляющего импульса,
что дает возможность изменять время
протекания тока через тиристор в течение
полупериода напряжения сети и напряжение
на его выходе, подаваемое на нагрузку, в
данном случае на двигатель.
273.
Рис.29.2. График зависимости напряженияна электродвигателе от угла отпирания тиристора
274.
Для управления тиристорамивыпрямителя используется система
импульсно-фазового управления
(СИФУ), выполняющая следующие
функции:
• определение моментов времени, в
которые должны открываться те или
иные конкретные тиристоры; эти
моменты времени задаются сигналом
управления, который поступает с
выхода САУ на вход СИФУ;
275.
• формирование открывающих импульсов,передаваемых в нужные моменты
времени на управляющие электроды
тиристоров и имеющих требуемые
амплитуду, мощность и длительность.
Момент подачи открывающихся импульсов
(см.рис.29.3.) определяется при
равенстве управляющего напряжения
Uупр с пилообразным опорным
напряжением Uпил. В момент равенства
напряжений формируются прямоугольные
импульсы
276.
Рис.29.3. Принцип работы системы импульсно-фазового управления277.
При малой величине управляющегонапряжения угол открытия тиристоров
мал (∆α1 и ∆α3) ;
при большой величине управляющего
напряжения угол открытия тиристоров
увеличивается (∆α2).
278. Занятие №30 (2 часа) Схема регулирования частоты вращения асинхронных двигателей изменением напряжения статора с помощью СИФУ
279.
Рис. 30.1. Схема регулирования частоты вращения асинхронныхдвигателей изменением напряжения статора с использованием
СИФУ и управляемых тиристоров.
280.
Между зажимами сети и статора двигателявключены три пары встречно-параллельно
соединенных тиристоров: Т1—Т2; ТЗ—Т4 и
Т5—Т6.
Управляющие электроды тиристоров
подсоединены к выходам системы
импульсно-фазового управления (СИФУ).
Система импульсно-фазового управления
распределяет управляющие импульсы тока
на все тиристоры и, кроме того, с помощью
подключенного на вход напряжения Uy
управления сдвигает управляющие импульсы
тока для каждого тиристора относительно
соответствующего фазного напряжения
281.
То есть с помощью СИФУ производитсярегулирование угла α управления
тиристорами.
К валу двигателя подсоединен вал
тахогенератора ТГ, э. д. с. етг на зажимах
якоря которого пропорциональна частоте
вращения двигателя етг=γn,
где γ — коэффициент пропорциональности.
Электродвижущая сила тахогенератора
сравнивается с задающим напряжением Uз,
снимаемым с потенциометра ЗП, причем эти
напряжения включены навстречу друг другу.
282.
Разность напряжений Uз и етг, равнаянапряжению управления
Uy=U3 - етг=U3 - γn
поступает на вход СИФУ.
Рассмотрим работу схемы при увеличении
нагрузки на валу двигателя.
Пусть при частоте вращения n1 двигателя таким
образом были подобраны задающий сигнал
U3 и сигнал обратной связи етг, что
напряжение управления определяет угол
регулирования α, равный 75°.
283.
При увеличении нагрузки на валу частотавращения двигателя начнет снижаться,
соответственно начнет уменьшаться и э. д. с.
тахогенератора
етг=γn.
Уменьшение етг вызовет увеличение
напряжения Uy управления, что определит
уменьшение с помощью СИФУ угла
регулирования до значения α=60°.
Напряжение на входе двигателя повысится и
частота вращения его вала увеличится.
284.
Изменяя с помощью потенциометра ЗПзначение задающего напряжения U3, можно
задавать программную скорость вращения
электродвигателя привода, которая затем
будет поддерживаться автоматически в
заданных пределах.
Из изложенного следует, что с помощью
тиристорного регулятора напряжения можно
осуществить пуск, реверсирование,
торможение и регулирование частоты
вращения асинхронного двигателя.
285.
Это говорит о больших возможностяхиспользования асинхронного электропривода
с тиристорными регуляторами напряжения и
определяет широкую область его
применения.
Основными достоинствами рассматриваемой
системы электропривода является ее
относительная простота, надежность,
легкость автоматизации в общей
технологической схеме производства,
удобство управления.
286. Занятие №31 (2 часа) Частотный способ регулирования скорости асинхронных двигателей с помощью электромашинных преобразователей.
287.
Частотный способ является одним изнаиболее перспективных и широко
используемых в настоящее время
способов регулирования частоты
вращения асинхронных двигателей.
Принцип его заключается в том, что,
изменяя частоту питающего двигатель
напряжения, можно в соответствии с
выражением
изменять его частоту вращения
288.
Упрощенная блок-схема частотногорегулируемого электропривода показана на
рис. 31.1.
Необходимым элементом привода является
преобразователь частоты, на вход которого
подается стандартное напряжение сети Uc
(220, 380 В и .т, д.) стандартной
промышленной частоты fс=50 Гц, а с его
выхода снимается переменное напряжение
Uрег регулируемой частоты fpeг .
289.
Рис. 31.1. Упрощенная блок-схема частотногорегулируемого электропривода
290.
Регулирование выходной частотыпреобразователя осуществляется с помощью
управляющего сигнала, изменение которого
определяет в конечном итоге изменение
частоты вращения асинхронного двигателя.
На рис. 31.1. в качестве регулируемого
двигателя показан короткозамкнутый
асинхронный электродвигатель, который
обычно и применяется в этой системе
привода.
291.
Различные типы преобразователей частоты,которые нашли применение в области
частотного регулирования электропривода,
могут быть разделены на две группы,
отличающиеся друг от друга по
используемым техническим средствам и
устройствам.
Первую группу составляют так называемые
машинные или вращающиеся
преобразователи, в которых для получения
переменной частоты используются обычные
или специальные электрические машины.
292.
На рис. 31.2. в качестве примера приведенасхема преобразователя частоты с
синхронным генератором.
Преобразователь состоит из двух частей:
агрегата постоянной скорости, включающего
асинхронный двигатель АД (вместо него
может быть использован и синхронный
двигатель) и приводимый им генератор
постоянного тока ГПТ, и агрегата переменной
скорости, состоящего из регулируемого
двигателя постоянного тока ДПТ,
приводящего во вращение синхронный
генератор переменной частоты СГ.
293.
Рис. 31.2. Электромашинный преобразователь частоты.294.
Двигатель АД питается от сети с частотойfс=50 Гц, а на зажимах генератора СГ частота
может регулироваться.
При изменении с помощью сопротивления R1
тока возбуждения генератора ГПТ
изменяются напряжение, подводимое к якорю
двигателя ДПТ, и частота его вращения.
При этом меняется и частота напряжения на
зажимах генератора СГ (определяемая по
выражению
295.
Где:- частота вращения ротора
генератора СГ;
- число пар полюсов генератора
- частота питания приводных
асинхронных двигателей АД1, АД2 и АДЗ,
подключенных к генератору СГ.
Напряжение на зажимах асинхронных
двигателей регулируется с помощью
сопротивления R3, выключенного в цепь
возбуждения генератора СГ.
296.
Применение этого преобразователя частотыпозволяет плавно регулировать частоту
вращения асинхронных двигателей АД1—
АДЗ в широком диапазоне, однако процессу
регулирования частоты в этой системе
присущи и существенные недостатки.
Как видно из рис. 31.2. для создания
преобразователя необходимо использование
четырех электрических машин, рассчитанных
на полную мощность потребителей (группы
асинхронных двигателей), что определяет
громоздкость установки и ее дороговизну.
297.
Двойное преобразование энергии — энергиипеременного тока частоты f =50 Гц в энергию
постоянного тока и далее опять в энергию
переменного тока регулируемой частоты—
сопровождается выделением потерь энергии
во всей цепи преобразования, что определяет
невысокий к. п. д. системы. Использование
коллекторных машин постоянного тока
требует непрерывного' надзора и ухода, их
работа сопровождается шумом.
298.
Тем не менее машинный преобразовательчастоты, построенный по схеме на рис. 31.2.
использовался для осуществления
индивидуального привода рабочих
рольгангов прокатного стана, а также для
некоторых других производственных
механизмов.
299. Занятие №32 (2 часа) Принцип частотного способа регулирования скорости асинхронных двигателей с помощью статического
преобразователя300.
Большое развитие получила вторая группапреобразователей частоты - так называемые
статические преобразователи.
Название это они получили потому, что система
построена на статических элементах и
устройствах, таких, как полупроводниковые
приборы, конденсаторы, магнитные
усилители и т. д.
Развитие статических преобразователей
частоты особенно ускорилось в связи с
появлением новых мощных
полупроводниковых приборов, в частности
тиристоров.
301.
Большое внимание, которое уделяется вопросусоздания регулируемых статических
преобразователей частоты, определяется
теми высокими технико-экономическими
показателями, которые приобретает
регулируемый частотный электропривод в
случае их использования. Повышается к. п. д.
системы, регулирования (он достигает 0,85—
0,9) и ее быстродействие, устраняется шум
при работе. В дальнейшем изложении
рассматриваются только тиристорные
преобразователи частоты.
302.
Все статические преобразователи частоты (ПЧ)могут быть разделены на две группы:
• преобразователи без звена постоянного тока
с непосредственной связью питающей сети и
нагрузки;
• преобразователи с промежуточным звеном
постоянного тока.
Рассмотрим схему и принцип действия
преобразователя без звена постоянного тока.
303.
Упрощенная блок-схема преобразователячастоты (ПЧ) без звена постоянного тока
показана на рис. 32.1.
Пунктиром обведен собственно ПЧ, который
состоит из силовой части (СЧ) и схемы
управления (СУ). В силовую часть ПЧ,
которая осуществляет преобразование
электрической энергии переменного тока с
постоянными напряжением Uc и частотой fс в
энергию переменного тока с регулируемыми
напряжением Upeг и частотой f рег, входят
тиристоры и в некоторых случаях
согласующие трансформаторы.
304.
Рис. 32.1. Блок-схема преобразователя частоты с непосредственной связью.305.
Схема управления обеспечивает управлениетиристорами силовой части ПЧ с помощью
импульсов напряжения, подаваемых на
управляющие электроды тиристоров в
нужный момент времени.
Принцип получения переменной частоты f рег(и
переменного напряжения Upeг) на выходе ПЧ
этого типа рассмотрим на примере
простейшей схемы на рис. 32.2.,
представляющей лишь силовую часть ПЧ.
306.
Рис. 32.2. К принципу работы преобразователя частотыс непосредственной связью.
307.
Отметим, что эта схема полностью аналогичнасхеме на рис. 28.2.а, однако несколько другой
принцип управления ключами К1 и К2
позволяет осуществлять преобразование
частоты питающего напряжения. Рассмотрим,
каким будет напряжение на нагрузке Upeг при
различных возможных режимах работы
ключей, предположив при этом, что на вход
схемы подано синусоидальное напряжение
Uc стандартной частоты fс (рис. 32.3.а).
308.
1. Если ключи постоянно разомкнуты, тонапряжение на нагрузке отсутствует.
2. При постоянно замкнутых ключах
напряжение на нагрузке Upeг равно
напряжению сети Uc и может быть
изображено синусоидой на рис. 32.3.а.
При этом в силу наличия диодов ток через
каждый ключ проходит только половину
периода Тс напряжения сети,
соответствующего проводящему
направлению данного диода.
309.
Рис. 32.3. Кривыенапряжения на нагрузке.
а — при постоянно
закрытых ключах;
б — при замыкании
ключа K1;
в — при замыкании
ключа К2;
г, д — при поочередном
замыкании ключей.
310.
3. Если постоянно замкнут лишь один изключей, то ПЧ представляет собой
однополупериодную схему выпрямления и
напряжение на нагрузке представляет собой
однополупериодное выпрямленное
напряжение той или иной полярности, как это
показано на рис. 32.3.б и в.
311.
Рис. 32.3. Кривыенапряжения на нагрузке.
а — при постоянно
закрытых ключах;
б — при замыкании
ключа K1;
в — при замыкании
ключа К2;
г, д — при поочередном
замыкании ключей.
312.
4. Допустим теперь, что ключи К1 и К2замыкаются попеременно, на одинаковый
интервал времени (рис.32.3.г.); вначале до
момента времени t1 замкнут К1, затем, в этот
момент времени К1 размыкается и
замыкается К2, оставаясь в этом положении
до момента времени t2, затем К2 размыкается
и вновь замыкается K1 и т. д.
При такой работе ключей на нагрузке
образуется уже переменное напряжение,
состоящее из полусинусоид выпрямленного
напряжения различной полярности.
313.
Если для наглядности заменить реальноенапряжение на нагрузке (рис. 32.3.г.)
привычной нам синусоидой (пунктир на
рисунке), то окажется, что ее период Трег1 и
соответственно частота fpeг1 будут отличаться
от тех же параметров напряжения сети.
Увеличим теперь время замкнутого состояния
каждого из ключей (рис. 32.3.д.). Вновь на
нагрузке образуется напряжение
переменного тока, но уже имеющее новое
значение частоты fpeг2, отличное от fc и fpeг1.
314.
Рис. 32.3. Кривыенапряжения на нагрузке.
а — при постоянно
закрытых ключах;
б — при замыкании
ключа K1;
в — при замыкании
ключа К2;
г, д — при поочередном
замыкании ключей.
315.
Таким образом , меняя продолжительностьпоочередного замыкания ключей К1 и К2,
можно изменять частоту fpeг напряжения
переменного тока на нагрузке.
В этом и заключается принцип регулирования
частоты в ПЧ с непосредственной связью.
Отметим два важных свойства ПЧ этого типа:
регулируемая частота fpeг всегда меньше
частоты сети fс , а переменное напряжение на
нагрузке нё является синусоидальным, хотя и
состоит из частей синусоиды напряжения сети.
Более качественные кривые напряжения на
нагрузке получаются в трехфазных схемах ПЧ.
316. Занятие №33 (2 часа) Частотный способ регулирования скорости асинхронных двигателей с помощью статического преобразователя без
звенапостоянного тока.
317.
Одна из распространенных тиристорных схемтрехфазного ПЧ с непосредственной связью
представлена на рис. 33.1.
Схема состоит из трех одинаковых групп (фаз)
тиристоров, обеспечивающих питание
трехфазной нагрузке zа, zб и zc.
Каждая из групп содержит шесть тиристоров, три
из которых подсоединены анодами ко
вторичным обмоткам трансформатора Тр, а три
другие— катодами к тем же обмоткам.
В схеме имеется нулевой провод, связывающий
нулевую точку трансформатора Тр и общую
точку трехфазной нагрузки, в силу чего схема
на рис. 33.1. обычно называется нулевой.
318.
Рис. 33.1. Схема преобразователя частоты с непосредственной связью.319.
Каждая фаза этой схемы работает независимоот остальных, поэтому для пояснения
принципа ее действия можно рассмотреть
одну из фаз, например фазу А, управляемую
группой I тиристоров T1—Т6.
Предположим, что фазные напряжения на
вторичных обмотках трансформатора Тр
изменяются по синусоидальному закону, как
это показано на рис. 33.2.а, а нагрузка имеет
активный характер. Если тиристоры Т1—Т6
закрыты (управляющие импульсы от СУ не
подаются), то все напряжение
прикладывается к «закрытым» тиристорам и
напряжение на нагрузке zа равно нулю.
320.
Рис. 33.2. Кривые напряжений преобразователя частоты снепосредственной связью,
а — напряжение сети;
б, е — напряжение на нагрузке при преобразовании частоты.
321.
Подадим теперь от СУ открывающие импульсына T1 в момент t1, на Т2 в момент t2 и на ТЗ в
момент t3.
Так как эти моменты времени являются
моментами естественного открытия
тиристоров (потенциал анода тиристора
становится более положительным, чем
катода), они откроются и к нагрузке za будет
приложено напряжение, представляющее
собой участки трех синусоид вторичных
напряжений uа, uб и uс, как это показано на
рис. 33.2.б.
322.
Если теперь снять управляющие импульсы сТ1—ТЗ и подать импульсы на тиристоры Т6,
Т4 и Т5 в моменты t5, t6, t7, являющимися для
них моментами естественного открывания, то
на нагрузке также образуется напряжение в
виде участков синусоид, но уже имеющее
противоположную полярность.
Если теперь осуществлять поочередное
открытие тиристоров Т1—ТЗ и Т4—Т6 в
указанном порядке, то изображенная на рис.
33.2.б кривая и uza будет периодически
повторяться.
323.
Таким образом на нагрузке za образуетсянапряжение переменного тока с периодом
Tрег и частотой fpeг=1 / Tрег.
Нетрудно заметить из рис. 33.2, что период Трег
этого напряжения больше, чем период
сетевого, напряжения Тс, или, что то же
самое, частота напряжения на нагрузке fpeг
меньше, чем частота питающего напряжения
fc.
Зависимость между fpeг и fc в данном трехфазном
преобразователе определяется формулой
324.
Где h = 0,1,2,3…- число открываемыхтиристоров в группе за вычетом одного.
Из формулы видно, что регулируемая
частота fpeг при рассмотренном
принципе управления тиристорами
Т1-Т6 может изменяться лишь дискретно,
в зависимости от числа открывающихся
тиристоров h.
325.
В принципе рассматриваемый ПЧ позволяет и плавнорегулировать выходную частоту fpeг Это достигается
тем, что между моментом снятия управляющих
импульсов с группы тиристоров Т1—ТЗ и моментом
подачи импульсов на тиристоры группы Т4—Т6
искусственно вводится временная пауза ∆tП (см. рис.
33.2.б).
В этом случае выходная частота fpeг определится
выражением
m1 – число фаз
Плавно регулируя паузу ∆tП , можно плавно изменять
выходную частоту fpeг .
326.
Рис. 33.2. Кривые напряжений преобразователя частоты снепосредственной связью,
а — напряжение сети;
б, е — напряжение на нагрузке при преобразовании частоты.
327. Занятие №34 (2 часа) Принцип частотного способа регулирования скорости асинхронных двигателей с помощью статического
преобразователя со звеномпостоянного тока.
328.
Блочная схема преобразователя частоты созвеном постоянного тока показана
на рис. 34.1.
Силовая часть ПЧ этого типа состоит из двух
основных блоков: управляемого выпрямителя
(УВ) и управляемого инвертора (УИ).
Напряжение сети Uc стандартной частоты fс
подается на вход УВ, преобразующего
переменное напряжение Uc в постоянное Е0.
Значение этого напряжения может
регулироваться в широких пределах с
помощью схемы управления (СУУВ).
329.
Рис. 34.1. Блок-схема преобразователя частоты со звеном постоянного тока.330.
Выпрямленное (и регулируемое в общемслучае) напряжение Е0 подается на вход
управляемого инвертора (УИ), которые
преобразует напряжение постоянного тока E0
в трехфазное переменное напряжение Uрег
регулируемой частоты fрег.
Частота выходного напряжения fрег УИ задается
его схемой управления СУУИ в функции
сигнала управления.
Остановимся подробнее на работе
управляемого инвертора, полагая при этом,
что c помощью тех или иных УВ на его вход
подается напряжение постоянного тока Е0
331.
Принцип получения регулируемойчастоты f рег рассмотрим на примере
схемы на рис. 34.2.
Предположим, что трехфазная активная
нагрузка соединена в звезду, а
тиристоры Т1—Т6, собранные в
мостовую схему, с помощью схемы
управления СУУИ могут открываться в
требуемой последовательности и на
любой отрезок времени.
332.
Рис. 34.2. Схема управляемого инвертора.333.
Чаще всего на практике используются схемыПЧ, в которых продолжительность открытого
состояния каждого тиристора λ составляет
половину или треть периода Тpeг выходной
частоты fрег, а сдвиг моментов открытия
тиристоров Т1—Т6 составляет шестую часть
этого периода.
Рассмотрим вначале работу схемы с
Временная токовая диаграмма работы
тиристоров для этого случая показана
на рис. 34.3., где проходящие через нечетные
тиристоры токи фаз Ia, Ib, Ic отложены в
положительном направлении, а проходящие через четные — в отрицательном.
334.
Рис. 34.3. Диаграмма работы тиристоров приТ рег
2
335.
Как видно из этой диаграммы, в каждый моментвремени оказываются включенными три
тиристора из шести, причем за время
периода имеется шесть интервалов (/, //, ///,
IV, V, VI) различных сочетаний открытых и
закрытых состояний тиристоров.
Для определения формы напряжения на
нагрузке рассмотрим схемы включения
нагрузки на каждом из этих шести
интервалов.
336.
Изобразим вначале эту схему для интервала /,где открыты тиристоры T1, Т5 и Т6, в виде
эквивалентной схемы на рис. 34.3. а.
На этом интервале работы ПЧ начала фаз А и
С оказываются включенными на точку +Е0, а
начало фазы В на точку - Е0. Если при этом
сопротивления всех трех фаз одинаковы, то
эквивалентное сопротивление параллельно
соединенных фаз А я С будет в 2 раза
меньше сопротивления фазы В.
Тогда и напряжение на параллельно
соединенных фазах А и С в 2 раза меньше,
чем на фазе В, т. е. составляет величину
337.
Рис, 34.4. Схемы соединения нагрузки.а — на I интервале работы инвертора;
б — на II интервале работы инвертора;
в —на III интервале работы инвертора
338.
Рассмотрим теперь II интервал, на которомпродолжают быть открытыми тиристоры T1 и
Т6, закрылся тиристор Т5 и открылся
тиристор Т2. Получающаяся при этом схема
представлена на рис. 34.4.б.
Как видно, на этом интервале фазы В и С
оказываются включенными параллельно, к
ним прикладывается напряжение
к фазе А — напряжение
На III интервале закрывается тиристор Т6 и
открывается тиристор ТЗ (тиристоры Т1 и Т2
по-прежнему открыты),
339.
в соответствии с чем этому интервалусоответствует схема рис. 34.4.в, в которой
уже фазы А и В оказались включенными
параллельно.
Таким же образом можно изобразить схемы для
IV, V и VI интервалов. Нетрудно заметить, что
они окажутся аналогичными соответственно
схемам для /, // и /// интервалов, но «с другой
'полярностью напряжения на началах фаз.
Если теперь представить графически
напряжение на фазах нагрузки, то оно
изобразится в виде кривых на рис. 34.5.
340.
Рис. 34.5. Напряжение на нагрузке при работе преобразователя частоты при341.
Их рассмотрение позволяет сделать важноезаключение: фазы нагрузки питаются
переменным напряжением, причем
максимумы этого напряжения сдвинуты по
фазам на треть периода.
Другими словами, на нагрузке получилась
стандартная система трехфазного
напряжения переменного тока, но только
несинусоидальной формы.
Несколько другая форма выходного
напряжения ПЧ будет в том случае, если
продолжительность, открытого состояния
каждого тиристора будет составлять треть
периода Трег
342.
регулируемой выходной частоты fрег,а нагрузка будет по-прежнему соединена в
звезду.
Для этого случая токовая диаграмма работы
тиристоров представится в виде рис. 35.6, из
которого видно, что при
в каждый интервал времени открыты лишь два
тиристора.
Это приводит к тому, что в каждом интервале
времени две фазы нагрузки оказываются
последовательно включенными на
напряжение Е0, а третья фаза оказывается
отключенной.
343.
Рис. 34.6. Диаграмма работы тиристоров при344.
В соответствии с этим напряжение на каждой изпоследовательно соединенных фаз равно
Е0/2, а на третьей (свободной) равно нулю.
Кривые фазного напряжения для этого случая
приведены на рис. 34.7.
345.
Рис. 34.7. Напряжение на нагрузке при работе преобразователя частоты при346. Занятие №35 (2 часа) Схема для регулирования скорости асинхронных двигателей с помощью статического преобразователя со звеном
постоянного тока.347.
Одна из распространенных практических схемсиловой части преобразователя частоты
приведена на рис. 35.1.
В этой схеме тиристоры Т7—Т12 образуют
управляемый выпрямитель (УВ). На выходе УВ
включены дроссель L0 и конденсатор С0,
обеспечивающие вместе с диодами Д7- Д12
циркуляцию реактивной мощности.
Назначение тиристоров Т1—Т6 было рассмотрено
выше. Конденсаторы С и индуктивности L
вместе с диодами Д1—Д6 образуют цепи
искусственной коммутации, обеспечивающие
закрытие основных тиристоров Т1—Т6 в нужный
момент времени.
348.
Рис. 35.1. Практическая схема преобразователя частотысо звеном постоянного тока.
349.
Значение (амплитуда) напряжения на выходеПЧ Uрег регулируется изменениtм Е0 на
выходе УВ, а его частота fрег определяется
частотой коммутации тиристоров Т1—Т6,
задаваемой схемой управления СУУИ. I
Приведенная на рис. 35.1. силовая схема ПЧ
является хотя и весьма распространенной, но
далеко не единственной. На практике нашли
применение и другие виды схем ПЧ со
звеном постоянного тока, которые
отличаются схемами УВ, искусственной
коммутации тиристоров или формами
выходного напряжения. Однако общие
принципы их работы остаются теми же.
350.
Сопоставим два рассмотренных вида ПЧ — снепосредственной связью и со звеном
постоянного тока.
Основное преимущество ПЧ с
непосредственной связью состоит в его
более простой силовой схеме с меньшим
числом элементов, поскольку для его работы
не требуется управляемого выпрямителя,
коммутирующих цепей, а также элементов
контура реактивной мощности. В
соответствии с этим и надежность его работы
может оказаться выше, чем у ПЧ со звеном
постоянного тока.
351.
Однако в свою очередь ПЧ с непосредственнойсвязью имеют один очень существенный
недостаток, уже отмеченный выше —
максимальное значение выходной
регулируемой частоты fрег не превосходит
практически 40% частоты питающей сети, что
ограничивает область их применения в
регулируемом электроприводе.
Остановимся на общих показателях частотного
способа регулирования асинхронных
электродвигателей и возможных областях его
применения.
352.
Частотное регулирование является весьмаэкономичным, так как регулирование частоты
вращения двигателя в этой системе не
сопровождается выделением больших потерь
скольжения в роторной цепи, ухудшающих к.
п. д. электропривода и приводящих к
необходимости завышения мощности
двигателя.
Регулирование частоты вращения в этой
системе может осуществляться плавно, в
широком диапазоне, в обе стороны от
естественной характеристики, т. е.
двигатель может иметь частоту
вращения, большую номинальной.
353.
Во многих случаях хорошие показателирегулирования могут быть достигнуты в
разомкнутой системе. При повышенных
требованиях к электроприводу
необходимо использование тех или
иных обратных связей, т. е. применение
замкнутой системы регулирования.
В силу высоких отмеченные показателей
частотный способ регулирования в
настоящее время нашел очень широкое
применение и имеет наилучшие
перспективы развития.
354.
Практически единственно возможнымоказывается частотный электропривод
для привода высокоскоростных
электрошпинделей металло- и
деревообрабатывающих станков,
электроверетен, специальных
экспериментальных установок
(вентиляторы высокоскоростных
аэродинамических труб, различных
испытательных стендов) и т. д.
355.
Частота вращения этих электроприводовДостигает 150 000 об/мин и более.
Получение таких больших частот
(вращения с помощью двигателей
постоянного тока технически
неосуществимо и возможно только при
использовании специальных
короткозамкнутых асинхронных
двигателей при питании их током
«повышенной частоты (до 2500 Гц при
частоте вращения 150 000 об/мин).
356.
Частотное управление нашлоприменение в транспорте для
регулирования частоты вращения
тяговых электродвигателей. Последние
работают в весьма тяжелых условиях
влажности, запыленности, постоянной
смены температур. При этом
асинхронные короткозамкнутые
двигатели оказываются наиболее
пригодными вследствие своей простоты
и надежности.
357.
Широкое внедрение частотногоэлектропривода во многом
определяется также и тем
обстоятельством, что отечественной
промышленностью освоен выпуск
широкой номенклатуры статических
преобразователей частоты. Среди них
— преобразователи для питания
электроинструмента, преобразователи
для питания приводов прядильных
машин, преобразователи широкого
назначения и др.
358. Занятие №36 (2 часа) Импульсный способ регулирования частоты вращения асинхронных двигателей
359.
Для регулирования частоты вращенияасинхронных двигателей широкое
применение находит импульсный способ.
Сущность его заключается в периодическом
(импульсном) изменении какого-либо
параметра двигателя или питающей сети, в
силу чего способ и получил название
импульсного.
Обычно такими параметрами являются
напряжение питающей сети или активные
сопротивления в цепях статора или ротора
двигателя.
360.
Принцип импульсного регулирования частотывращения асинхронного двигателя
рассмотрим на примере работы схемы на
рис. 36.1.
В этой схеме в цепь ротора включена
добавочное активное сопротивление R2д,
которое может закорачиваться трехфазным
ключом К.
Допустим, что двигатель при закороченном
сопротивлении R2д(ключ К замкнут) имеет
естественную механическую характеристику
1 (рис. 36.2.а), а при наличии сопротивления«
(ключ К разомкнут) — искусственную
характеристику //.
361.
Рис.36.1.Схема
импульсного
регулирования.
362.
Рис. 36.2. К принципу импульсного регулирования.а — механические характеристики двигателя;
б — диаграмма работы ключа К
в — изменение частоты вращения двигателя во времени.
363.
Предположим, что ключ К может периодическизамыкаться и размыкаться с некоторой
постоянной частотой и регулируемой в
широком диапазоне длительностью его
замкнутого состояния. Временная диаграмма
работы ключа К может быть
проиллюстрирована рис. 36.2.б, где
обозначено:
t0 — время открытого состояния ключа;
t3 — время его .закрытого состояния;
Т=t3+t0 — время (период) повторяющегося
цикла.
364.
Часто работу такого ключа характеризуютотношением времени закрытого состояния ко
времени цикла и называют скважностью γ:
Тогда можно сказать, что естественная
характеристика 1 двигателя (рис. 36.2,а)
соответствует скважности уз=1 (ключ
замкнут), а искусственная — скважности Y0=0
(ключ разомкнут).
365.
Рис. 36.2. К принципу импульсного регулирования.а — механические характеристики двигателя;
б — диаграмма работы ключа К
в — изменение частоты вращения двигателя во времени.
366.
Если при этом момент нагрузки, равен Мс, тоскважности γ3=1 соответствует частота
зращения nуст.з, , а скважности γ0=0, nуст.0, так
как при этих частотах вращения момент
двигателя равен моменту нагрузки.
Эти два значения являются граничными,
предельными частотами вращения,
определяющими диапазон ее регулирования
при данном Мс,,
367.
Определим теперь, с какой частотой будетвращаться электродвигатель при некотором
промежуточном значении скважности работы
ключа 0<γ<1.
Пусть вначале ключ К был закрыт (γз=1) и
двигатель работал на характеристике I в
точке α, где его момент равен моменту
нагрузки, вращаясь с частотой nуст.з
Уменьшим теперь скважность работы ключа К
до некоторого значения
368.
Тогда в момент времени t1 (рис. 36.2.б,) ключ Кразомкнётся и будет введено в цепь ротора
сопротивление, которому соответствует
характеристика II. При этом точка α с
характеристики I (переместится в положение
точки αI на характеристику II (пунктир на
рисунке), причем в силу механической
инерции практически при постоянной частоте
вращения nуст.а.
Этой частоте вращения на новой
характеристике двигателя соответствует
момент MI, меньший момента нагрузки Мс.
369.
Рис. 36.2. К принципу импульсного регулирования.а — механические характеристики двигателя;
б — диаграмма работы ключа К
в — изменение частоты вращения двигателя во времени.
370.
Поэтому ротор двигателя начнет замедляться ичастота его вращения будет снижаться до тех
пор, пока в момент времени tII,
соответствующий точке αII, ключ К вновь не
замкнется.
При этом изображающая точка переместится в
положение αIII на характеристике I, в которой
момент двигателя МIII уже превышает Мс, и
двигатель начнет разгоняться.
В точке α, соответствующей теперь уже
моменту времени
ключ вновь откроется и весь цикл начнет
повторяться.
371.
Из рис.36.2.a. видно, что частота вращениядвигателя, а тем самым и производственного
механизма колеблется в пределах от
nуст.з до n1 около некоторой средней частоты
вращения nср1, соответствующей заданной
скважности γ1 .
График изменения частоты вращения в
функции времени показан на рис. 36.2.в. в
виде кривой I.
372.
Рис. 36.2. К принципу импульсного регулирования.а — механические характеристики двигателя;
б — диаграмма работы ключа К
в — изменение частоты вращения двигателя во времени.
373.
Уменьшим теперь скважность работы ключа Кдо значения
(пунктир на рис. 36.2.б), т. е. сократим время
закрытого состояния ключа. В этом случае:
частота вращения двигателя за время
увеличившейся паузы t'0 уменьшится до
более низкой частоты вращения (точка aIV на
характеристике II), а за время закрытого
состояния ключа t'3 увеличится лишь до n2
(точка αVI), меньшей, чем начальная частота
вращения nуст.з.
374.
Нетрудно заметить, что уменьшилась и средняячастота вращения двигателя до значения
nср.2, а график частоты вращения в функции
времени (кривая II на рис. 36.2.в) будет
располагаться ниже кривой I,
соответствующей скважности γ1.
Таким образом, изменяя скважность работы
ключа К, можно регулировать среднюю
частоту вращения электродвигателя.
В этом и заключается принцип регулирования
частоты вращения электродвигателей в
схемах импульсного регулирования.
375. Занятие №37 (2 часа) Контрольная работа № 3.
376. Тема 4. Шаговые двигатели в системах автоматического управления.
377. Занятие №38 (2 часа) Устройство и основные характеристики шаговых двигателей.
378.
На рис. 38.1 представлено поперечное сечениетипичного современного шагового двигателя
(ШД);
Это так называемый однопакетный реактивный
двигатель.
Сердечник статора имеет шесть выступающих
зубров, в то время как ротор всего четыре.
Сердечники как ротора, так и статора
выполнены из магнитомягкой стали.
Три набора обмоток расположены, как показано
на рисунке. Каждый набор состоит из двух
катушек, соединенных последовательно.
379.
Рис.38.1.Принципы работы реактивного ШД:1 - сердечник статора; 2 - сердечник ротора
380.
Набор обмоток называется фазой, и,соответственно, машина — трехфазным
двигателем.
Ток на обмотки подается от источника
постоянного тока через переключатели I, II и
III. В положении (I) обмотка фазы I
подключена к источнику через переключатель
I или говорят возбуждена фаза I. Магнитный
поток, возникающий в результате
возбуждения, показан на рисунке стрелками,
В положении (I) два выступающих зубца
статора фазы I, будучи возбужденными,
останавливаются на одной прямой с двумя из
четырех зубцов ротора.
381.
В терминах динамики это положение являетсяположением равновесия. Когда замыканием
переключателя II в дополнение к фазе I
возбуждается фаза II, в зубцах статора,
соответствующих этой фазе, возникает
магнитный поток, как показано на рисунке для
положения (2), и вследствие "натяжения" в
наклонных силовых линиях магнитного поля
возникает вращающий момент. Ротор, в конце
концов, принимает положение (3).
382.
Таким образом, за время выполнения однойоперации переключения ротор
поворачивается на фиксированный угол,
который называется углом шага или шагом, в
данном случае на 15°.
Если теперь разомкнуть переключатель I и
отсоединить от источника питания фазу I,
ротор повернется на следующие 15° и займет
положение (4). Таким образом, угловым
положением ротора в единицах угла шага
можно управлять с помощью процесса
переключения.
383.
Рис.38.1.Принципы работы реактивного ШД:1 - сердечник статора; 2 - сердечник ротора
384.
Если переключения производятпоследовательно, то ротор будет вращаться
шаговыми движениями, причем средней
частотой вращения также можно управлять с
помощью процесса переключения.
в настоящее время для управления ШД в
качестве электронных переключателей
применяют транзисторы, а сигналы на
переключение генерируются цифровыми
интегральными схемами или
микропроцессором (рис.38.2.)
385.
Рис.38.2. Современная система управления ШД:1 - источник постоянного тока; 2 - микропроцессор
3 - транзисторный коммутатор (инвертор); 4 - двигатель
386.
Шаговый двигатель — это электрическийдвигатель, преобразующий цифровой
электрический входной сигнал в механическое
движение.
Система управления, используемая в ШД,
обладает следующими существенными
преимуществами:
• возможна работа без обратной связи, обычно
необходимой для управления положением или
частотой вращения;
• не накапливается ошибка положения;
• ШД совместим с современными цифровыми
устройствами.
387.
ВидеоШаговый двигатель
Смотреть
388. Занятие №39 (2 часа) Шаговый двигатель в разомкнутой системе управления.
389.
39.1. Принцип работы шагового двигателя в системахавтоматического управления.
Как правило, работой ШД управляет электронная
схема, а питание его осуществляется от источника
постоянного тока.
Шаговые двигатели применяют для управления
частотой вращения без применения дорогого контура
обратной связи. Этот принцип используется в
приводе с разомкнутой цепью.
Рассмотрим работу трехфазного двигателя. (рис.39.1.)
Наиболее важной особенностью ШД является то, что на
каждый импульс управления ротор поворачивается
на фиксированный угол, значение которого в
градусах называется шагом.
390.
Рис. 39.1. Структурная схема системы управления шаговым двигателем1 - логический блок; 2 - инвертор; 3 - шаговый двигатель
391.
При получении команды логическая цепь определяет,какая фаза должна быть задействована и посылает
сигнал управления на инвертор, определяющий
значение тока ШД.
Логическая схема обычно монтируется из
транзисторных элементов или интегральных схем.
Если выходной потенциал логической схемы
высокий, возбуждается соответствующая фаза
обмотки, например фаза 1.
Если выходной потенциал низкий, фаза обмотки с этим
номером отключается. Как показано на рис. 39.2.,
двигатель вращается по часовой стрелке при
управляющей последовательности
392.
Рис. 39.2. Диаграммы последовательности входных импульсов управленияи последовательности возбуждения обмоток
393.
направление против часовой стрелки реализуется приобратной последовательности
При этом заранее оговаривается, каким в данных
условиях считать направление вращения по часовой
стрелке.
39.2. Особенности применения шагового двигателя.
Определим особенности управления ШД без обратной
связи и некоторые технические термины.
39.2.1. Маленький угол шага.
Двигатель проворачивается за каждый импульс
управления на определенный фиксированный угол.
Чем меньше шаг, тем большая частота вращения
может быть достигнута.
394.
Одной из особенностей ШД является то, что они могутобеспечивать маленький шаг. Инженерам важно
знать количество шагов за один оборот, т.е. шаговое
число. Соотношение между углом шага φS и шаговым
числом S следующее:
S
360
s
Двигатели, используемые в приводах символьных
дисков печатающих устройств, выполняют 96, 128
или 132 шага за один оборот.
Обычно четырехфазные двигатели имеют шаговое
число 200. Некоторые прецизионные двигатели
обеспечивают 500 или 1000 шагов за один оборот.
Однако шаг простых двигателей составляет 90, 45
или 15°.
395.
39.2.2. Высокая точность частоты вращения.Это важнейший параметр, определяющий качество ШД.
Двигатели конструируют так, чтобы в ответ на входной
импульс они поворачивались на определенный угол и
останавливались в определенном положении.
В силу того, что точность позиционирования без нагрузки
зависит от параметров (физических и конструктивных)
ротора и статора, из-за момента нагрузки имеются
отклонения от конечного положения.
С целью увеличения момента фиксации воздушный зазор
между зубцами ротора и статора выполняется
минимальным. Точность позиционирования зависит
только от характеристик двигателя и инвертора, в то
время как другие параметры схемы управления на нее
не влияют.
396.
39.2.3. Точность позиционирования:а) ошибка углового положения — определяется
как максимальная положительная или
отрицательная ошибка углового положения
(по сравнению с нормированным углом
шага), которая наблюдается при движении
ротора из одного положения равновесия в
следующее;
б) точность позиционирования максимальная
ошибка углового положения для конечного
положения, относящегося ко всему набору
нормированных углов шага, которые
выполняются за полный оборот ротора.
397. Занятие №40 (2 часа) Усилители момента систем управления с шаговыми двигателями.
398.
Шаговый двигатель имеет небольшие усилия насвоем валу и используется в автоматических
системах как задатчик момента.
В замкнутых системах управления сигнал,
пропорциональный углу поворота шагового
двигателя отрабатывается мощным
исполнительным двигателем, уменьшая
сигнал рассогласования до нуля.
В разомкнутых системах для создания
большого усилия на выходном валу
используются усилители момента.
399.
Фрикционный механический усилитель моментарис. 40.1. применен в токарном станке с ЧПУ.
Усилитель состоит из двух муфт, выполненных
в виде барабана со стальной лентой.
Поворот ШД приводит к затягиванию ленты
одного из барабанов и ослаблению другого (в
зависимости от направления поворота).
При этом момент непрерывно вращающегося
асинхронного двигателя передается на
выходной вал. Поворот барабана вновь
приводит к ослаблению ленты.
400.
Рис. 40.1. Привод смеханическим
усилителем момента с
фрикционными
муфтами;
1 — входной вал,
вращаемый
асинхронным
двигателем (АД);
2 — блок управления ШД;
3 — вал, вращаемый
шаговым двигателем
4 — шестерни,
поворачиваемые ШД;
5 —лента;
6 — барабан;
7 —выходной вал.
401.
Система отрабатывает частоту вращения скоэффициентом усиления по моменту 50.
Области применения привода с таким
усилителем весьма разнообразны; однако он
целесообразен при сравнительно малом
диапазоне изменения скорости, так как
потери на скольжение в муфтах,
рассеиваемые в виде тепла, приводят к
нагреву механизма и изнашиванию ленты.
402.
В различных системах получил применениепривод с гидравлическим усилителем на
выходе шагового двигателя.
На входе системы установлен ШД,
поворачивающий цилиндрический
распределитель золотника (рис 40.2.).
При повороте распределителя относительно
втулки одна из полостей гидродвигателя
соединяется с напорным каналом
гидросистемы, а другая со сливом.
Перепад давления приводит к повороту
выходного вала гидродвигателя.
403.
Рис. 40.2. Привод сгидроусилителем
момента.
а — прямая связь
выходного вала
гидродвигателя с
втулкой,
б — связь выходного
вала с втулкой через
рейку;
1— управляющий
золотник;
2 — гидродвигатель; 3
— распределитель; 4
— втулка;
5 — пульт управления
ШД;
6 — силовой винт;
7 —рейка обратной
связи.
404.
При повороте выходного вала гидродвигателямеханически связанная с ним втулка
перекрывает доступ масла в полости
гидродвигателя.
В гидравлическом двигателе возможно
получение значительно лучшего
использования активных материалов
машины, чем в электродвигателе.
405. Занятие №41 (2 часа) Замкнутая система управления с шаговым двигателем.
406.
В системах управления с ШД, рассмотренныхранее импульсы управления поступают от
внешнего источника, и принято допущение, что
ШД в состоянии среагировать на каждый из
них.
Этот способ относится к управлению без
обратной связи. Он имеет свои преимущества
и широко используется в управлении частотой
вращения либо позиционированием. Однако в
таком случае возможности ШД ограничены.
Например, ШД с управлением без обратной
связи может пропустить импульс управления,
если частота следования импульсов или
инерции нагрузки слишком велика.
407.
Возможности ШД могут быть в большойстепени расширены, если использовать
обратную связь по положению или по частоте
вращения. В управлении с обратной связью
необходим датчик положения для
определения положения ротора.
В настоящее время в качестве таких датчиков
наиболее часто применяют оптические,
которые обычно устанавливают на валу
двигателя. Управление с обратной связью
предпочтительнее не только потому, что
исключает ошибки в совершении шага.
Движение ротора более ровное и можно
достигнуть высокой шаговой частоты.
408.
Рис. 41. 1. Схемы управления ШД с обратной связью1 - логический блок; 2 - источник постоянного тока;
3 - коммутатор (инвертор) шагового двигателя;
4 - импульсы обратной связи (числовая информация о
положении) ;
5 - оптический датчик; 6 - шаговый двигатель
409.
Датчик положения (рис.41.2.), являетсякомбинацией непрозрачного диска с 50
маленькими отверстиями, находящимися на
7,2° друг от друга, и четырех пар
фототранзистор—источник света.
На рис. 7.10 показана модель аналогичного
датчика, установленного непосредственно на
валу двигателя. Для простоты показан только
один канал.
410.
Рис. 41.2. Конфигурация оптического датчика обратной связи поположению:
1 - оптический датчик положения ротора; 2 - шаговый двигатель;
3 - логический блок; 4 — обмотки;
411.
Принцип работы оптического датчикаположения ротора показан на рис. 41.3.
На диске 1 чередуются прозрачные и
непрозрачные сектора.
Так он вращается вместе с валом двигателя,
маска 2 периодически пропускает или
блокирует свет.
Выходной сигнал датчика формируется в
требуемом виде как цифровой сигнал.
412.
Рис. 41.3. Принцип работы оптического датчикаположения ротора:
1 — вращающийся диск; 2 - неподвижная маска;
3 - чувствительный элемент; 4 - источник света
413. Занятие №42 (2 часа) Использование шаговых двигателей в периферийных устройствах вычислительных машин.
414.
Серийное печатающее устройство являетсяавтоматическим, печатающим в каждый такт
времени по одному символу.
Конструкции печатающих устройств различных
фирм мало отличаются друг от друга.
Схема печатания может быть рассмотрена по
рис. 42.1.
415.
Рис. 42.1. Конструкция печатающего устройства:1 - бумага; 2 - символьный диск; 3 - молоточек;
4 - шаговый двигатель для движения бумаги; 5 - редуктор;
6 - серводвигатель постоянного тока;
7 - шаговый двигатель для подачи ленты;
8 - шаговый двигатель для передвижения каретки;
9 - направляющие; 10 — проволочный тросик.
416.
Количество символов может быть 64, 96, 128или 132. Два последних числа используют в
символьных дисках, работающих с латинским
и японским алфавитами.
В основном ШД применяют для поворотов
символьного диска в схеме управления без
обратной связи при скорости печатания
порядка 30 символов в секунду. Для высоких
скоростей берут ШД, управляемые по схеме с
обратной связью.
Шаговый или серводвигатель постоянного тока
используют для перемещения каретки.
417.
Шаговый двигатель с постоянным магнитом суглом шага 45 или 90° применяют для
продвижения ленты, а также валика прогона
бумаги.
Применение шаговых двигателей в
двухкоординатном
XY-графопостроителе.
ШД используют для передвижения пера в
графопостроителе, который служит для
получения графического изображения
результатов вычислений.
418.
Рис. 42.2. Механизмуправления XYграфопостроителя.
1 - блок шкивов на каретке
пера;
2 - огибающая Y;
3 — стальной гибкий кабель
в нейлоновой оплетке;
4 - демпфер;
5 -пластиковый шкив на
шаровом подшипнике;
6 -поворотный шкив;
7 - шаговый двигатель
419. Занятие №43 (2 часа) Использование шаговых двигателей в станках с числовым программным управлением.
420.
43.1. XY-столы и вращающиеся столы.Устройство для управления положением на
плоскости, использующее два ШД для
управления движением по направлениям X и
Y, называется XY -столом.
Конструктивная схема этого устройства
показана на рис. 43.1.
Вращающимся столом с цифровым
управлением также можно управлять с
помощью ШД (рис. 43.2.). В этих устройствах
механическая обработка выполняется после
позиционирования или вращения.
421.
Рис. 43.1. XY-стол с числовым программным управлением.422.
Рис. 43.1. Вращающийся стол с числовым программным управлением.423.
43.2. Фрезерные станки.Движением детали по трем осям во фрезерных
станках с числовым программным
управлением можно управлять с помощью
трех ШД.
На рис. 43.3. изображены два двигателя для
управления движением по осям X и Y, а
третий, управляющий движением по оси Z и
расположенный под столом, не показан.
424.
Рис. 43.3. Принципработы фрезерного
станка с числовым
программным
управлением,
использующего три ШД:
1 - вращающий
двигатель фрезы;
2 - деталь;
3 - фреза;
4 - шаговый двигатель.
425. Тема 5. Микропроцессорные автоматизированные системы
426. Занятие №44 (2 часа) Общие принципы устройства ЭВМ для управления электроприводами.
427.
Системы управления современнымитехнологическими объектами
(металлорежущими станками, лифтами,
складскими комплексами, прокатными
станами и т.д.), основу которых составляет
автоматизированный электропривод,
осуществляют обработку большого объема
информации с целью выработки
управляющих воздействий (логических,
цифровых или аналоговых), поступающих на
электроприводы.
Такие системы управления выполняются на
основе цифровых устройств — ЭВМ.
428.
Все цифровые вычислительные устройства —от супербольших рабочих станций до
встроенной в автоматизированный
электропривод микропроцессорной системы
управления — имеют аналогичную
архитектуру и в значительной мере общие
характерные свойства.
Укрупненные структуры ЭВМ и микроЭВМ
совпадают и могут быть представлены в виде
схемы, приведенной на рис. 44.1
429.
Рис. 44.1. Укрупненная структура ЭВМ430.
Эта схема предполагает программный принципуправления для решения широкого круга
задач на основе составленной оператором
программы, т.е. набора инструкций,
автоматически обрабатываемых ЭВМ.
Микропроцессорные управляющие
вычислительные машины (УВМ), или для
краткости просто микроЭВМ, являются одной
из разновидностей микропроцессорных
средств вычислительной техники. Они
реализуются на основе функционально
законченных изделий, построенных на базе
БИС.
431.
В отличие от ЭВМ общего назначения, которыепредназначены для разнообразных
вычислительных операций в темпе времени,
определяемом самой машиной,
микропроцессорные УВМ можно определить
как программно-управляемые ЭВМ для
специализированных применений в реальном
времени, таких, как управление
технологическими комплексами и другими
объектами, работа в различных
измерительных комплексах и приборах, где
темп вычислений диктуется технологическим
процессом.
432.
Например, управление работой ядерныхреакторов, процессом варки стали и чугуна,
пуском ракет, автоматической посадкой
летательных аппаратов и др.
УВМ функционируют как системы с обратной
связью, получая в определенные такты
времени информацию от датчиков объекта
управления, производя необходимые
вычисления в соответствии с заранее
записанной программой и формируя
результаты обработки для направления их в
исполнительные устройства {в том числе
электроприводы).
433.
Принцип программного управления процессомобработки данных делает микроЭВМ
универсальным устройством, так как
позволяет реализовать требуемый для
конкретного применения алгоритм
взаимодействия с объектом.
При этом особенности конкретного алгоритма
учитываются путем разработки прикладного
или специального программного обеспечения
и выбора необходимых функциональных
модулей системы.
434.
Архитектура микроЭВМ или микропроцессора(МП) — это совокупность аппаратных,
микропрограммных и программных средств,
создающих организованную вычислительную
среду, необходимую для обработки данных в
соответствии с назначением микроЭВМ.
Вычисления, задаваемые программой,
осуществляются центральным процессором
(ЦП).
Его функция заключается в выборке команд из
памяти и выполнении заданных ими
операций.
435.
Рис. 44.1. Укрупненная структура ЭВМ436.
Помимо этого, ЦП осуществляет управлениевсеми процессами преобразования и
передачи информации как внутри ЦП, так и
во всей вычислительной системе.
Основная память (ОП) служит для хранения
команд программы, в соответствии с которой
обрабатывается информация, а также
числовых констант, исходных, промежуточных
данных и результатов вычислений.
437.
С точки зрения функционального устройстваОП имеет две разновидности:
постоянное запоминающее устройство (ПЗУ),
которое предназначено для хранения команд
программы и часто применяемых числовых
констант, и
оперативное запоминающее устройство (ОЗУ),
служащее для хранения промежуточных
данных и результатов вычислений.
Конструктивно ОП состоит из ячеек памяти,
каждая из которых имеет адрес в виде
двоичного числа и содержит некоторое
количество запоминающих элементов.
438.
Количество элементов в ячейке памяти обычноравно числу разрядов двоичных чисел, с
которыми оперирует процессор. Число,
хранимое в ячейке памяти, называют словом.
Основная память выполняется в виде модулей
емкостью по 1...16К слов, а общее число
модулей определяется спецификой
применения микроЭВМ. Максимальное число
ячеек (слов) в составе ОП определяется
разрядностью двоичного числа, которым
кодируется адрес ячейки. В большинстве
микроЭВМ это 16-разрядное число, которое
можно представить так: 216 = 65 536 адресов.
439.
Для упрощения записи обычно обозначают 210 1024 в виде двоичной тысячи и записывают:210 = IK. С учетом этого емкость ОП в
приведенном примере равна
216 = 26·210 — 64К слов.
Устройства ввода осуществляют прием
информации от различных носителей
(перфокарт, клавиатур, датчиков
технологических величин и т.д.) и
преобразование ее (в случае необходимости)
в двоичный код.
440.
Устройства вывода преобразуют электрическиесигналы, поступающие из памяти, которые
несут в себе информацию о результатах
обработки данных в форму, удобную для
дальнейшего использования (перфолента,
магнитный диск, печатный текст, изображение
на экране видеотерминала и др.).
В отдельных случаях цифровые сигналы
преобразуются в аналоговую форму. Иногда
ввод и вывод реализуются одним физическим
устройством, которое в этом случае
называется устройством ввода-вывода (УВВ).
441.
Большинство мини- и микроЭВМ устроенытаким образом, что все функциональные
блоки подключены параллельно к единому
каналу связи, который называется
магистралью.
В процессе обмена информацией по каналу
связи участвуют два типа устройств, активное
(инициатор обмена) и пассивное.
В качестве активного устройства обычно
выступает центральный процессор. При
параллельном подключении пассивных
устройств обмена к магистрали необходимо
знать, с каким именно устройством должен
произойти обмен.
442.
Рис. 44.1. Укрупненная структура ЭВМ443.
Для этого каждое из устройств снабжаетсяадресом, а в составе магистрали
предусматриваются специальные линии, по
которым сообщается информация в двоичной
форме в параллельном формате об адресе
пассивного устройства. Совокупность этих
линий в магистрали образует шину адреса
(ША). Передача самой информации в
параллельном формате производится также
по линиям, которые образуют шину данных
(ШД). В составе магистрали существует еще
один набор линий, по которым передаются
различные управляющие сигналы и которые
образуют шину управления (ШУ).
444. Занятие №45 (2 часа) Основные определения микропроцессорных средств.
445.
К настоящему времени в областимикропроцессорной техники сложилась
определенная терминология.
Микропроцессор (МП) — это программноуправляемое устройство, предназначенное
для обработки цифровой информации и
управления процессом этой обработки,
Микропроцессор как программноуправляемое устройство содержит в своем
составе элементы, позволяющие настроить
его на выполнение любых функций, т.е.
реализовать любую зависимость между
входными и выходными
последовательностями сигналов.
446.
Микропроцессор является универсальнымсредством автоматики в смысле реализации
заданных функций.
Для решения определенной задачи МП должен
быть запрограммирован соответствующим
образом, ему должен быть обеспечен обмен
информацией с другими устройствами, к
числу которых относятся в первую очередь
запоминающие устройства и устройства
ввода-вывода.
447.
Микропроцессорная система (МПС) — этосовокупность взаимосвязанных устройств,
состоящая из одного или нескольких МП,
памяти (ЗУ), УВВ и ряда других устройств,
предназначенных для выполнения четко
определенных функций.
МикроЭВМ — это конструктивно оформленная
МПС, имеющая в своем составе панель
управления, устройства связи с внешними
объектами, источник питания и снабженная
программным обеспечением.
448.
Микроконтроллер (МК) — это устройство,выполняющее функции логического анализа
и управления. Например, МК управляют
работой внешних устройств микроЭВМ:
накопителей на ГМД, печатающих устройств,
графопостроителей и т.д.
МК имеет меньшую аппаратную сложность за
счет сокращения функций по выполнению
арифметических операций; в то же время он
имеет более развитые функции логического
управления.
449.
Микропроцессорный комплект (МПК)интегральных схем (ИС) — это совокупность
микропроцессорных ИС, однотипных по
конструктивно-технологическому
исполнению, для которых обеспечена
функциональная, структурная,
информационная и энергетическая
совместимость для использования в МПС.
Микропроцессорная система автоматического
управления (МПСАУ) — это система со
встроенными в нее средствами
микропроцессорной техники (МПТ).
450.
Взаимосвязь основных средств МПТ в составеМПСАУ показана на рис. 39.1., где
подчеркнута модульность и магистральность.
МП является составной частью МПС и
соответственно микроЭВМ и МПСАУ и
содержит в своем составе АЛУ, УУ и блок
регистров (БРг), в который входят:
аккумулятор, регистры адреса, общего
назначения, состояния, флажковые,
стековые, программный счетчики и т.д.
451.
Рис. 45.1. Взаимосвязь основных средств микропроцессорной техники452.
Кроме МП (одного или нескольких) МПС содержитЗУ (ОЗУ и ПЗУ), УВВ и ряд других устройств и
является одной из составных частей МПСАУ
(рис. 39.2.).
Взаимодействие составляющих частей МПСАУ
осуществляется посредством шин ША, ШД, ШУ,
а также шин измерения, контроля и
управления.
Связь с объектом (или процессом)
осуществляется через УСО, который содержит:
мультиплексор М, демультиплексор ДМ, датчик
Д, исполнительный механизм ИМ
453.
(например, электромагнит золотника гидро- илипнсвмосистемы), электропривод ЭП,
многоканальные ЦАП и АЦП , а также
мультиплексоров М и демультиплексоров ДМ.
454.
Рис. 45.2. Взаимосвязь основных средств микропроцессорной техники МПСАУ455. Занятие №46 (2 часа) Память микропроцессорных систем.
456.
Память определяется как функциональнаячасть МПС, предназначенная для записи,
хранения и воспроизведения (выдачи)
информации.
В целом весь комплекс технических средств,
реализующий функцию памяти, называется
запоминающим устройством (ЗУ), а
отдельные элементы ЗУ — запоминающими
элементами (ЗЭ)
Основные операции с памятью: запись —
занесение информации в память и
считывание — выборка информации из
памяти.
457.
Обе эти операции называются обращением кпамяти.
К основным характеристикам систем памяти и
отдельных ИС памяти относятся:
• информационная емкость памяти (емкость
памяти), определяемая максимально
возможным количеством битов хранимой
информации;
• ширина выборки (разрядность),
определяемая количеством разрядов
информации, записываемой в ЗУ или
извлекаемой из него за одно обращение.
458.
Время обращения (быстродействие)характеризуется обобщенным параметром —
временем цикла обращения к ЗУ, т.е. цикла
считывания (записи), которое определяется
от момента поступления кода адреса до
завершения всех процессов в микросхеме
при считывании (записи) информации.
При работе с памятью говорят также о времени
доступа к памяти, т.е. времени, необходимом
лая вывода информации из памяти на ШД
после адресации нужной области памяти.
Время доступа обусловливается
организацией памяти и скоростью работы
схем, на которых выполнена память.
459.
Потребляемая мощность указывается исходя израсчета на один бит и может быть различной
для режимов хранения и обращения.
Важной характеристикой ЗУ является его
способность сохранять информацию при
отключении питания. Здесь различают
энергонезависимые и знергозависимые ЗУ.
По способу хранения информации различают
статические и динамические ЗУ.
По способу доступа (обращения) к памяти
различают два класса ЗУ: с произвольным
доступом (адресные) и с последовательным
доступом.
460.
По функциональному назначению большинствотипов ЗУ разделяется на следующие группы:
• сверхоперативные ЗУ(СОЗУ);
• оперативные ЗУ (ОЗУ);
• постоянные ЗУ(ПЗУ);
• перепрограммируемые, ЗУ (ППЗУ);
• буферные ЗУ (БЗУ), служащие для
согласования различных типов ЗУ между
собой и с ВЗУ;
• стековые ЗУ,
• внешние ЗУ(ВЗУ), предназначенные для
хранения больших объемов информации
461. Занятие №47 (2 часа) Функциональные схемы электроприводов с микропроцессорным управлением.
462.
Микропроцессорное управлениеэлектроприводами широко используется в
станках с ЧПУ, промышленных и
транспортных роботах, автоматических
линиях, оборудовании металлургической,
химической промышленности и т.д.
В настоящее время микропроцессорные
системы используются практически везде, где
применяется силовая преобразовательная
техника.
463.
Основные достоинства МПС в управленииэлектроприводами:
• гибкость системы, обеспечиваемая
возможностью реализации различных
способов управления программными
средствами;
• обеспечение заданной точности
регулирования;
• возможность изменения параметров
регуляторов, работающих в реальном
времени;
• унификация аппаратуры.
464.
Широкое применение микропроцессорныхсредств управления электроприводом не
означает полного отказа от элементов
аналоговой техники.
Анализ многочисленных электроприводов
позволяет сделать вывод, что в настоящее
время предпочтение отдается аналоговоцифровой структуре, в которой границей,
разделяющей аналоговую н цифровую части
системы, является контур регулирования
тока.
465.
Пример электропривода постоянного тока стиристорным преобразователем приведен на
рис. 47.1.
Его основными функциональными узлами
являются:
• микроЭВМ,
• СИФУ с устройством синхронизации (УС),
• реверсивный тиристорный преобразователь
(ТП) сдатчиками состояния тиристоров (ДСТ)
• измерительный преобразователь ИП
перемещений.
466.
Рис. 47.1. Эпектропривод с микроЭ8М467.
Алгоритмы, требующие большого объемавычислений, реализованы аппаратно.
К ним относятся:
• формирование кода скорости,
• фазосмещение импульсов управления
тиристорами,
• логика раздельного управления тиристорного
преобразователя.
468.
Программным путем реализуются следующиефункции управления:
• прием и обработка дискретной информации
измерительного преобразователя
«перемещение — цифровой код» (ППК),
• расчет кода Ny управляющего воздействия в
соответствии с применяемыми законами
управления.
Программным путем реализованы регуляторы
стандартной настройки в контурах положения
и скорости.
469.
Для управления двигателем М применяетсяреверсивный ТП с раздельным управлением,
обеспечивающим лучшие массогабаритные
показатели.
ТП имеет лучшие динамические показатели при
мостовой схеме соединения вентилей.
Одновременная работа групп вентилей при
встречно-параллельной схеме ТП
исключается логическим переключающим
устройством (ЛПУ), получающим сигналы от
ДСТ.
470.
Фазосмещение импульсов управления ТПосуществляется единой для всех каналов
СИФУ с устройством синхронизации УС.
УС формирует код цифровой развертки,
поступающий в фазосдвигающий блок ФСБ.
Код жестко синхронизирован с началом и
концом интервала напряжения сети.
Распределитель импульсов РИ формирует
отпирающие импульсы по тиристорам ТП с
учетом фазы напряжения питания.
471.
ЛПУ осуществляет выбор группы тиристоров познаковому разряду кода управления Ку при
отсутствии тока в ТП, что фиксирует ДСТ.
В качестве ИП применяется фотоэлектрический
датчик. Обработка сигналов датчика с целью
получения кода скорости Nc производится в
ППК, режим работы которого зависит от
абсолютного значения частоты вращения
вала двигателя. Переключение режимов
осуществляется сигналом от микроЭВМ.
472. Занятие №48 (2 часа) Цифровая СИФУ.
473.
СИФУ должна обеспечиватьзапаздывание на расчетное время
импульса управления тиристором
относительно момента перехода через
нуль напряжения питания (момента его
естественного отпирания).
Реализация задержки возможна
программным путем или с помощью
внешнего устройства, называемого
таймером, который фактически
выполняет функцию реле времени.
474.
Программный способ реализациивременных задержек имеет несколько
недостатков. Во-первых, когда
выполняется программа отсчета
времени, МП не может выполнять
какую-либо программу. Он начнет
работать по другим программам лишь
при выполнении программы задержки.
Во-вторых, если требуется большое
время задержки, то необходимо
использовать при программировании
несколько регистров.
475.
Первый способ в современномэлектроприводе с МПС практически не
применяется из-за недостаточного
быстродействия МП.
Рассматриваемая задача легко решается
с помощью программируемого
аппаратного таймера {III). Таймер
представляет собой счетчик на
вычитание, начальное состояние
которого устанавливается программным
путем.
476.
Таймер имеет специальный вход, накоторый подаются тактовые импульсы
от генератора тактовых импульсов либо
от другого источника. Когда содержимое
счетчика становится равным нулю,
счетчик вырабатывает импульсный
сигнал на выходе.
Возможны два варианта схем
формирования управляющих
импульсов.
477.
Рис. 48.1. Первый вариант схемы формированияуправляющих импульсов цифровых СИФУ
478.
В первой схеме (рис. 48.1.) сигналом ШУв таймер ПТ записывается код,
соответствующий рассчитанной ЭВМ
временной задержке импульса от
начала отсчета. Отсчитав заданную
задержку времени, таймер посылает
сигнал программе управления
прерыванием, и микроЭВМ прерывает
процесс вычислений и выдает в
дешифратор код, соответствующий
нужному номеру тиристора,
включаемого в данный момент.
479.
Здесь код расшифровывается и выдаетсяимпульс на управляющий электрод
тиристора.
Во второй смехе (рис. 42.2.) микроЭВМ
одновременно с выдачей в таймер (ПТ)
временной задержки на дешифратор
сообщает код, соответствующий номеру
управляемого тиристора.
480.
Рис. 48.2. Второй вариант схемы формированияуправляющих импульсов цифровых СИФУ
481.
При переполнении таймеравырабатывается импульс, который
поступает на схему управления,
состоящую из схем И (по количеству
тиристоров преобразователя), где
производится также усиление сигналов.
В обеих схемах заполнение таймеров
производится сигналами генератора G.