








 mechanics
mechanicsSimilar presentations:






")



Прикладные методы решения задач строительной механики
1. СТРОИТЕЛЬНАЯ МЕХАНИКА
ЛекцияПрикладные методы решения задач
строительной механики
Доцент кафедры
«Самолетостроение»
к.т.н. Мухин Д.В.
2.
Рассмотренная в предыдущей лекции основная система уравнений теорииупругости в частных производных» как правило, не позволяет получить
точное решение даже для сравнительно простых и идеализированных
расчетных моделей реальных конструкций. В связи с этим на практике
широкое распространение получили приближенные методы решения,
изложению которых посвящена данная лекция.
Приближенные методы можно условно разделить на три класса —
континуальные, дискретные и дискретно-континуальные.
К континуальным относят методы, согласно которым рассчитываемая
система рассматривается как сплошная среда (континиум), причем
описывающие
ее поведение функции,
например
перемещения,
аппроксимируются гладкими функциями координат.
Дискретные методы, интенсивное развитие которых в последние годы
связано с совершенствованием вычислительной техники, основаны на
замене задачи об определении непрерывных искомых функций задачей о
приближенном отыскании значений этих функций в конечном числе точек
рассчитываемой конструкции.
Дискретно-континуальные методы совмещают дискретное описание
искомых функций по одной координате с построением непрерывного
решения по другой.
3.
1. Континуальные методы1.1 Метод Ритца—Тимошенко
Метод, предложенный В. Ритцем и распространенный С. П. Тимошенко на
задачи строительной механики, позволяет получить приближенное (а в
отдельных случаях и точное) решение в перемещениях на основе
вариационного принципа Лагранжа.
Идею метода, рассмотрим на примере решения пространственной задачи
теории упругости.
Для построения приближенного решения три перемещения и, v, w представим
в виде следующих рядов:
u Ai U i x, y, z ,
i
v Bi Vi x, y, z ,
i
w Ci Wi x, y, z .
i
В функции Ui, Vi, Wi называются аппроксимирующими и выбираются заранее.
Внося представленные в виде рядов функции перемещений u, v, w в
выражение полной энергии Э и выполняя интегрирование, получим:
Э Э A1 , A2 ... Ai , B1 , B2 ...Bi , C1 , C2 ...Ci .
Поскольку полная энергия превратилась таким образом в функцию от
коэффициентов, то условие минимума ее, следующее из принципа Лагранжа,
будет реализоваться обращением в нуль всех производных от полной энергии
по коэффициентам рядов.
4.
Разрешающая система уравнений будет иметь вид:Э
Э
Э
0,
0,
0.
Ai
Bi
Ci
Поскольку полная энергия есть квадратичная функция от перемещений, то
данные уравнения будут представлять собой систему линейных
алгебраических уравнений, причем количество этих уравнений всегда будет
равно количеству членов (коэффициентов), вводимых в рядах и,
следовательно, система будет полной относительно определяемых
коэффициентов. Найдя в результате решения этой системы коэффициенты Ai,
Вi, Сi можно далее по формулам рядов определить перемещения, а затем
деформации и напряжения, т. е. получить полное решение задачи.
Таким образом, основная идея метода, кардинально упрощающая решение и,
естественно, определяющая его приближенный характер, связана с тем, что
искомые перемещения отыскиваются в классе заранее заданных функций,
которые выбираются на основе опыта, интуитивно или на основе решений
более простых задач. В результате минимизации полной энергии
отыскивается распределение перемещений, наиболее близкое к истинному в
энергетическом смысле, а в некоторых случаях может быть найдено и
истинное поле перемещений, если оно содержится в заданном классе
функций.
5.
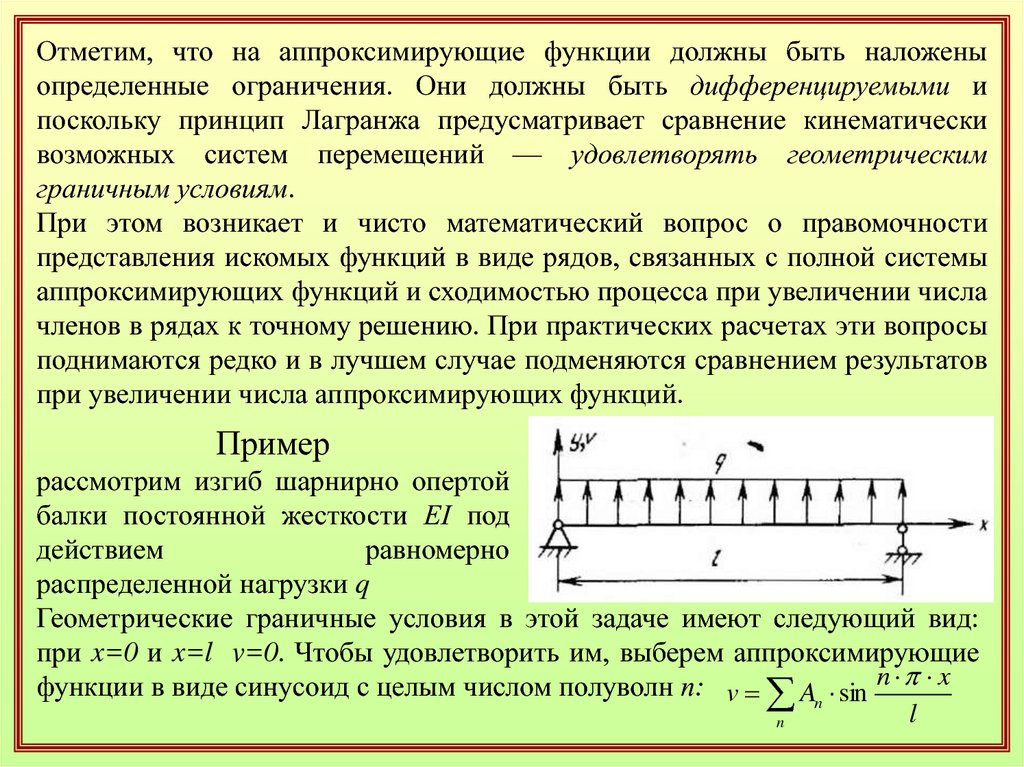
Отметим, что на аппроксимирующие функции должны быть наложеныопределенные ограничения. Они должны быть дифференцируемыми и
поскольку принцип Лагранжа предусматривает сравнение кинематически
возможных систем перемещений — удовлетворять геометрическим
граничным условиям.
При этом возникает и чисто математический вопрос о правомочности
представления искомых функций в виде рядов, связанных с полной системы
аппроксимирующих функций и сходимостью процесса при увеличении числа
членов в рядах к точному решению. При практических расчетах эти вопросы
поднимаются редко и в лучшем случае подменяются сравнением результатов
при увеличении числа аппроксимирующих функций.
Пример
рассмотрим изгиб шарнирно опертой
балки постоянной жесткости ΕΙ под
действием
равномерно
распределенной нагрузки q
Геометрические граничные условия в этой задаче имеют следующий вид:
при x=0 и x=l v=0. Чтобы удовлетворить им, выберем аппроксимирующие
функции в виде синусоид с целым числом полуволн п: v An sin n x
n
l
6.
Преобразование исходного функционалаu 2 v 2 w 2 u v w 2
Э G
x
y
z
2
x
y
z
V
2
2
2
G u v v w w u
2 y x z y x z
u v w
3
2
t 2 G 3 t dx dy dz
2 G 3
2
x y z
X v u Yv v Z v w ds X u Y v Z w dx dy dz.
S
V
для случая произвольной балки, нагруженной распределенной нагрузкой
приведено в предыдущей лекции, функционал имеет вид
EJ 2 EF 2
Э
v
u0 q v dx
2
2
0
l
Так как в точке x=0 перемещение равно нулю то u0=0
EJ
2
Э v q v dx
2
0
l
7.
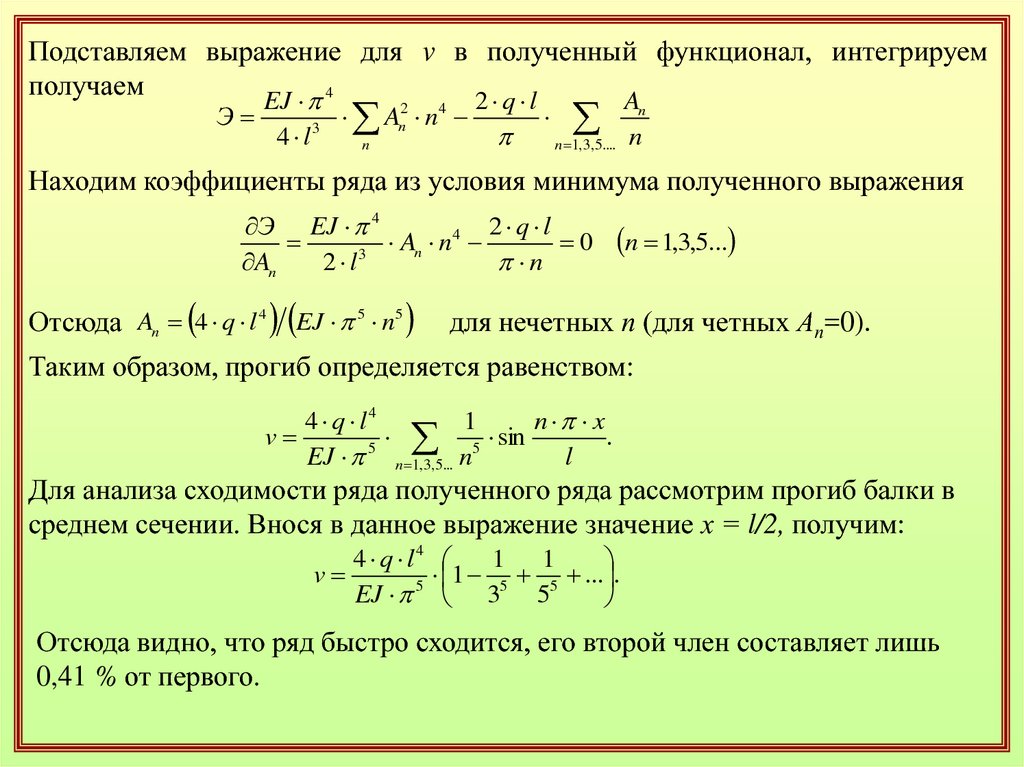
Подставляем выражение для v в полученный функционал, интегрируемполучаем
EJ 4
2 q l
An
2
4
Э
A
n
n n
4 l3
n 1, 3, 5.... n
Находим коэффициенты ряда из условия минимума полученного выражения
Э EJ 4
2 q l
4
A
n
0
n
An
2 l3
n
Отсюда An 4 q l 4 EJ 5 n5
n 1,3,5...
для нечетных п (для четных Ап=0).
Таким образом, прогиб определяется равенством:
4 q l4
1
n x
v
sin
.
EJ 5 n 1,3,5... n5
l
Для анализа сходимости ряда полученного ряда рассмотрим прогиб балки в
среднем сечении. Внося в данное выражение значение х = l/2, получим:
4 q l4
1 1
v
1
...
.
EJ 5 35 55
Отсюда видно, что ряд быстро сходится, его второй член составляет лишь
0,41 % от первого.
8.
Отметим, что сходимость построенного ряда падает при егодифференцировании. Так, например, нормальное напряжение определяется
через изгибающий момент, то есть через вторую производную от прогиба,
для которой ряд будет иметь следующий вид:
4 q l2
1
n x
v
sin
.
3
3
EJ n 1,3,5... n
l
что для среднего сечения дает
4 q l2
v
EJ 3
1 1
1 3 3 ... .
3 5
Здесь второй член составляет уже 3,7 % от первого. Что показывает, что при
решении задачи в перемещениях с точностью до конечного количества
слагаемых ряда точность определения перемещений выше точности
определения напряжений.
9.
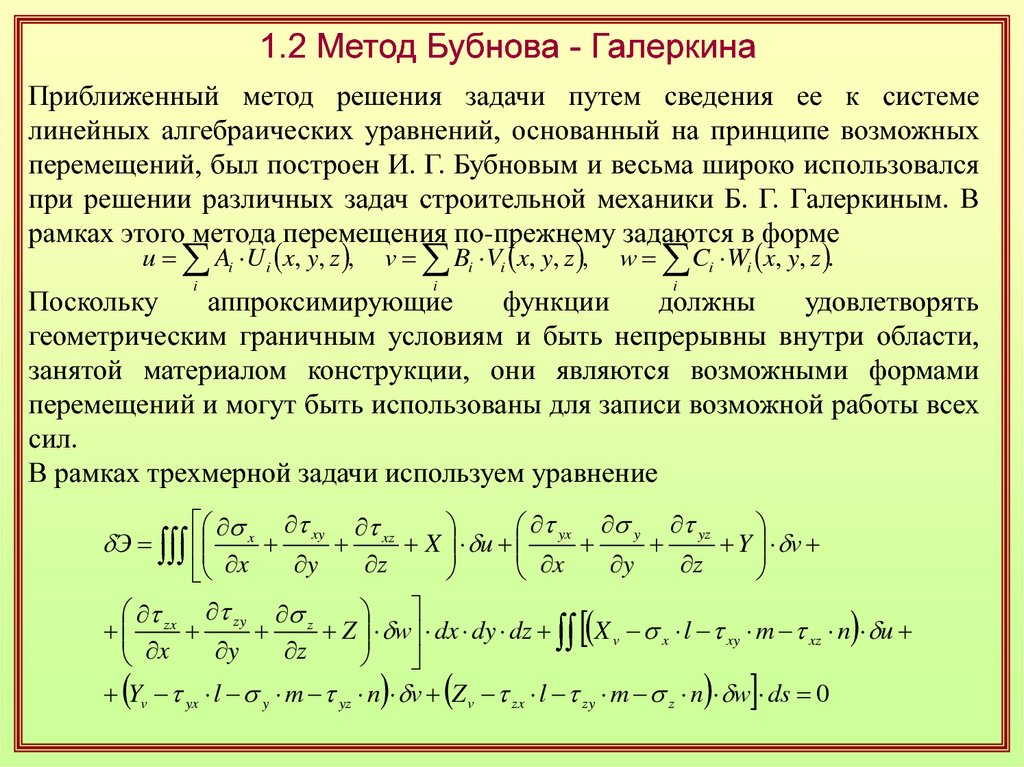
1.2 Метод Бубнова - ГалеркинаПриближенный метод решения задачи путем сведения ее к системе
линейных алгебраических уравнений, основанный на принципе возможных
перемещений, был построен И. Г. Бубновым и весьма широко использовался
при решении различных задач строительной механики Б. Г. Галеркиным. В
рамках этого метода перемещения по-прежнему задаются в форме
u Ai U i x, y, z ,
i
v Bi Vi x, y, z ,
i
w Ci Wi x, y, z .
i
Поскольку
аппроксимирующие
функции
должны
удовлетворять
геометрическим граничным условиям и быть непрерывны внутри области,
занятой материалом конструкции, они являются возможными формами
перемещений и могут быть использованы для записи возможной работы всех
сил.
В рамках трехмерной задачи используем уравнение
x xy xz
yx y yz
X u
Y v
y
z
y
z
x
x
Э
zx zy z
Z w dx dy dz X v x l xy m xz n u
x
y
z
Yv yx l y m yz n v Z v zx l zy m z n w ds 0
10.
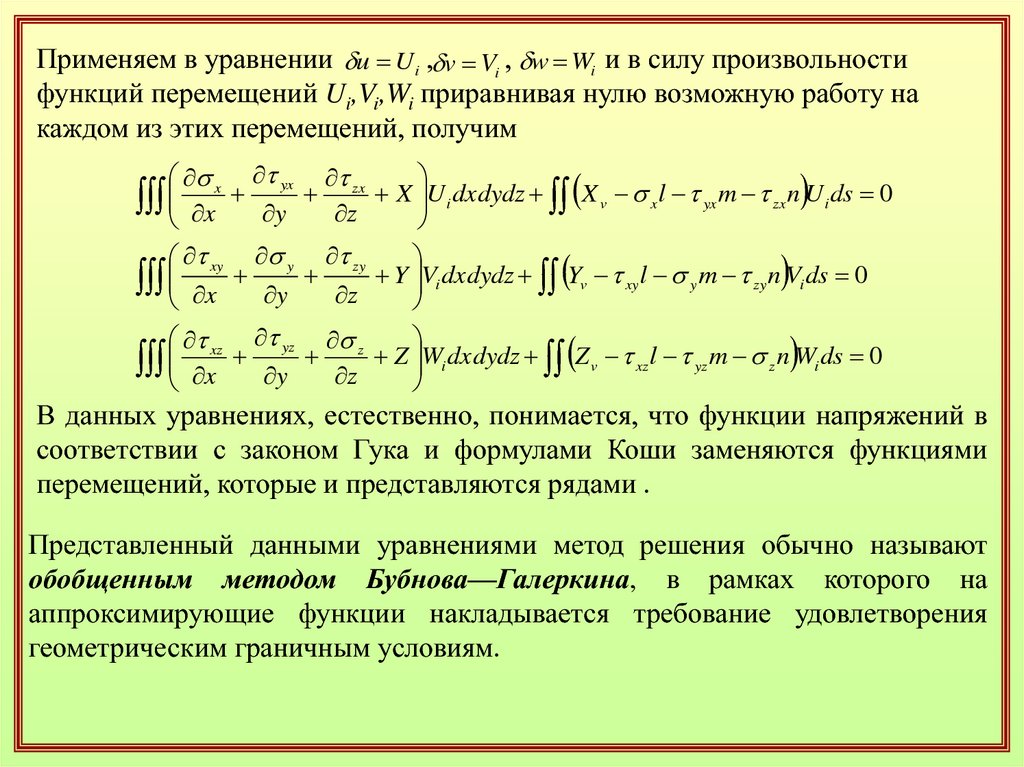
Применяем в уравнении u U i , v Vi , w Wi и в силу произвольностифункций перемещений Ui,Vi,Wi приравнивая нулю возможную работу на
каждом из этих перемещений, получим
x yx zx
U i dxdydz X v xl yx m zxn U i ds 0
X
x y z
xy y zy
Y
x y z Vi dxdydz Yv xyl y m zyn Vi ds 0
xz yz z
Z
x y z Wi dxdydz Z v xzl yz m z n Wi ds 0
В данных уравнениях, естественно, понимается, что функции напряжений в
соответствии с законом Гука и формулами Коши заменяются функциями
перемещений, которые и представляются рядами .
Представленный данными уравнениями метод решения обычно называют
обобщенным методом Бубнова—Галеркина, в рамках которого на
аппроксимирующие функции накладывается требование удовлетворения
геометрическим граничным условиям.
11.
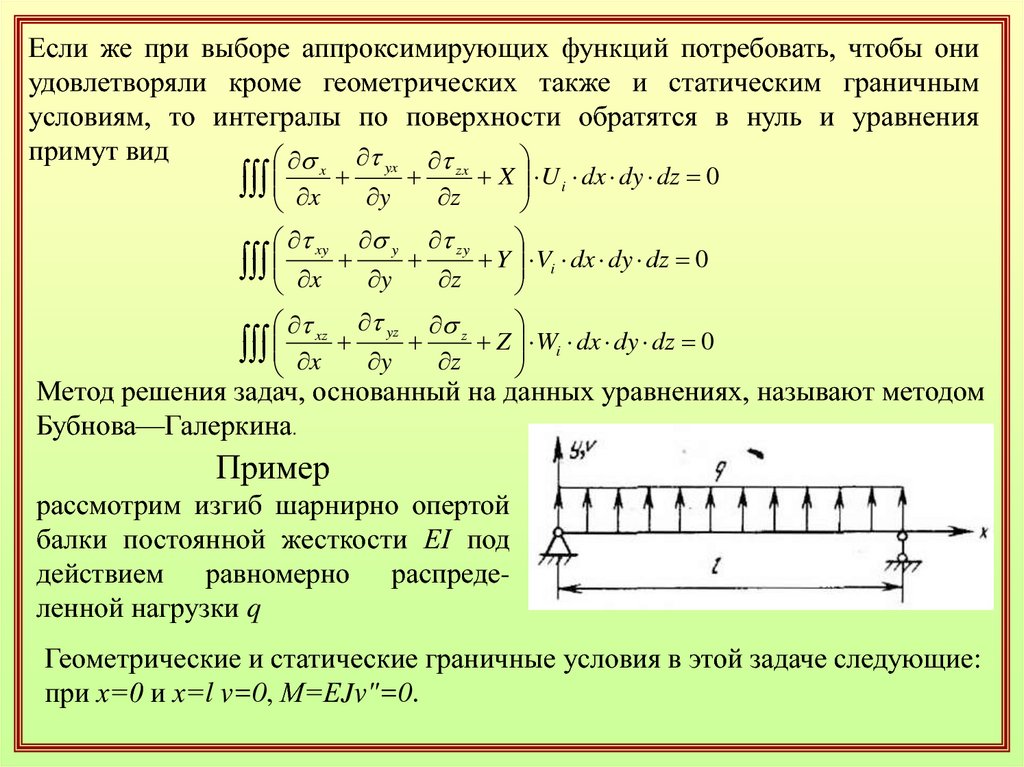
Если же при выборе аппроксимирующих функций потребовать, чтобы ониудовлетворяли кроме геометрических также и статическим граничным
условиям, то интегралы по поверхности обратятся в нуль и уравнения
примут вид
yx
x
zx
x y z X U i dx dy dz 0
xy y zy
Y
x y z Vi dx dy dz 0
xz yz z
Z
x y z Wi dx dy dz 0
Метод решения задач, основанный на данных уравнениях, называют методом
Бубнова—Галеркина.
Пример
рассмотрим изгиб шарнирно опертой
балки постоянной жесткости ΕΙ под
действием равномерно распределенной нагрузки q
Геометрические и статические граничные условия в этой задаче следующие:
при х=0 и х=l v=0, Μ=ΕJv"=0.
12.
При задании прогиба v в форме v An sin n xl
n
каждая из аппроксимирующих функций будет удовлетворять геометрическим
и статическим граничным условиям при целочисленных значениях
параметра n.
Записывая «возможную» работу сил, когда уравнение равновесия
представляется уравнением изогнутой оси балки, полученное в примере 1
предыдущей лекции
EJ v q
EJ v
l
получим
IV
q sin
0
n x
dx 0
l
Внося сюда v и выполняя интегрирование, получим
2l
n l
An EJ
0
q
l
2
n
4
откуда
4 q l4
An
EJ 5 n5
Т.е. функция v определяется так же, как и при расчете методом Ритца—
Тимошенко
13.
Сделаем одно замечание, общее для обоих рассмотренных методов.Процедуру выбора аппроксимирующих функций в рядах можно упростить,
если учесть, что между функциями Ui, Vi и Wi для каждого конкретного
номера i имеется определенное статическое соответствие, следующее из
уравнений равновесия, записанных в функциях перемещений. Указанного
статического соответствия, очевидно, можно всегда достичь, если выразить
компоненты перемещений через одну функцию путем удовлетворения части
уравнений равновесия. Рассмотрим, например, уравнения Ламе,
t
2 G 3 X 0,
x
x
t
G 2v G
2 G 3 Y 0,
y
y
t
G 2 w G
2 G 3 Z 0,
z
z
G 2u G
предполагая, что температурное воздействие и объемные силы отсутствуют,
т. е. t=0 и X=Y=Ζ=0. Введем разрешающую функцию φ по формулам
2
2
2
2
u
x z
v
y z
w
z 2
2 1
14.
Подставляя данные выражения в уравнения Ламе, можно убедиться в том,что первые два уравнения удовлетворяются тождественно, а третье
принимает вид 2 2 0
Если теперь задать функцию φ в виде ряда Ai i то согласно
i
представлению функций перемещений в виде рядов и определения функции
φ, получим
где
u Ai U i , v Ai Vi , w Ai Wi ,
i
i
i
2 i
2 i
2 i
Ui
, Vi
, Wi 2 2 1 2 i
x z
y z
z
При этом функции должны быть выбраны так, чтобы компоненты Ui, Vi и Wi
обязательно удовлетворяли заданным в задаче геометрическим граничным
условиям, что же касается коэффициентов Ai, то они могут определяться и в
соответствии с методом Ритца—Тимошенко или в соответствии с методом
Бубнова—Галеркина.
15.
1.3 Метод Власова—КанторовичаЭтот метод был сформулирован в одни и те же годы В.З. Власовым
применительно к построению приближенного расчета тонкостенных
пространственных систем и Л. В. Канторовичем применительно к расчету
изгибаемой пластинки. В отличие от изложенных выше двух методов,
согласно которым задача сводится к системе алгебраических уравнений,
рассматриваемый метод позволяет свести ее к системе обыкновенных
дифференциальных уравнений. Трудоемкость расчета при этом возрастает,
однако, как правило, увеличивается и точность. Согласно методу Власова—
Канторовича, который применяется обычно для решения двумерных задач,
неизвестные перемещения (одно или два) задаются в виде суммы
произведений двух функций, одно из семейств которых зависит только от
одной координаты и выбирается, а второе, зависящее от второй координаты,
определяется в результате расчета:
f n fin x in y
i
Пусть каждая из компонент перемещений fn (в конкретных задачах это будет
u, v, w) представляется представленным рядом, в котором функции φin
выбираются. Тогда полная энергия Э превратится в следующий функционал:
Э F x, f in , f in , f in dx
16.
Минимум этого функционала в соответствии с принципом Лагранжа будетреализовываться уравнениями Эйлера—Лагранжа
F d F d 2 F
0 i 1,2,3 ,
f in dx f in dx 2 fin
а естественные граничные условия определяют обобщенные статические
граничные условия.
Полученные уравнения будут представлять собой систему обыкновенных
линейных дифференциальных уравнений (второго или четвертого порядка).
Таким образом, представление перемещений в форме произведения
независимых функций сводит задачу, описываемую уравнениями в частных
производных к системе обыкновенных дифференциальных уравнений. В
связи с этим метод Власова—Канторовича часто называют методом
приведения к обыкновенным дифференциальным уравнениям.
Следует заметить, что аппроксимирующие функции φin при расчете
косоугольных и скошенных систем оказываются функциями от двух
координат. Рассматриваемую процедуру расчета можно распространить и на
трехмерную задачу, которую можно свести к системе двумерных уравнений,
если аппроксимирующие функции будут выбираться одномерными, или к
системе обыкновенных уравнений, если аппроксимирующие функции будут
выбираться двумерными.
17.
2. Конечно-разностные методы2.1 Метод сеток (Метод конечных разностей )
В предыдущем вопросе были рассмотрены континуальные методы, в
соответствии с которым искомое распределение перемещений или
напряжений отыскивается в виде разложений по системам выбираемых
гладких функций. Эти методы, как правило, позволяют получить
приближенное аналитическое решение, однако, пользуясь ими, не всегда
удается получить практически приемлемое решение многих важных задач. В
последние годы в связи с развитием вычислительной техники получили
широкое распространение численные методы, основанные на дискретном
представлении
рассчитываемой
конструкции
и
соответствующих
математических зависимостей.
Поскольку основой ряда таких методов является конечноразностное
представление операции дифференцирования, получим некоторые основные
конечно-разностные формулы для двумерных задач.
18.
В предыдущем вопросе были рассмотрены континуальные методы, в Пустьимеем некоторую дифференцируемую функцию f(х, у), которая описывает
геометрические или силовые факторы упругой системы. Разложим функцию
f(х, у) в направлении х в ряд Тейлора в окрестности заданной точки k, т. е.
x f x 2 2 f
2
f k 1 f k
1! x k
2! x
x 3 3 f
3
3! x
k
... ,
k
x f x 2 2 f
f k 1 f k
1! x k
2! x 2
x 3 3 f
3
3
!
k
x
... ,
k
где Δx — шаг сетки вдоль оси х (расстояние между точками k-1, k, k+1),
который будем считать постоянным. Оставив в этих разложениях члены до
второй производной включительно, сложением и вычитанием получим
формулы для вычисления первой и второй производных в центральных
разностях с погрешностью порядка Δx/2
1
f
f k 1 f k 1 ,
x k 2 x
2 f
2
x
1
2 f k 1 2 f k f k 1 .
x
Очевидно, такой же вид будут иметь
формулы для вычисления производных
в точке k в направлении оси у.
19.
Пользуясь полученными формулами иправилом умножения конечно-разностных операторов можно построить соотношения для вычисления производных
в центральных разностях любого
порядка в обыкновенных или в частных
производных.
В частности, для производных, наиболее часто встречающихся в задачах
строительной механики, эти формулы имеют следующий вид
1
f
f b f a ;
x k 2 x
f
1
f d f c ;
y k 2 y
2 f
2
y
1
2 f c f d 2 f k ;
k y
3 f
3
x
1
2 f a 2 f b f m f n ;
3
2
x
k
2 f
2
x
1
2 f a f b 2 f k ;
k x
2 f
1
f h fl f e f g ;
x
y
4
x
y
k
3 f
3
y
1
2 f c 2 f d f p f q ;
3
2
y
k
3 f
1
2 f a 2 fb f h fl f e f g ;
2
2
x y k 2 x y
20.
3 f1
2
2 f c 2 f d f h fl f e f g ;
2
x
y
2
x
y
k
4 f
4
x
1
4 6 f k 4 f a 4 f b f m f n ;
k x
4 f
4
y
1
4 6 f k 4 f c 4 f d f p f q ;
k y
4 f
1
2 2 2
4 f k 2 f a 2 fb 2 f c 2 f d f e f g f h fl
2
x y k x y
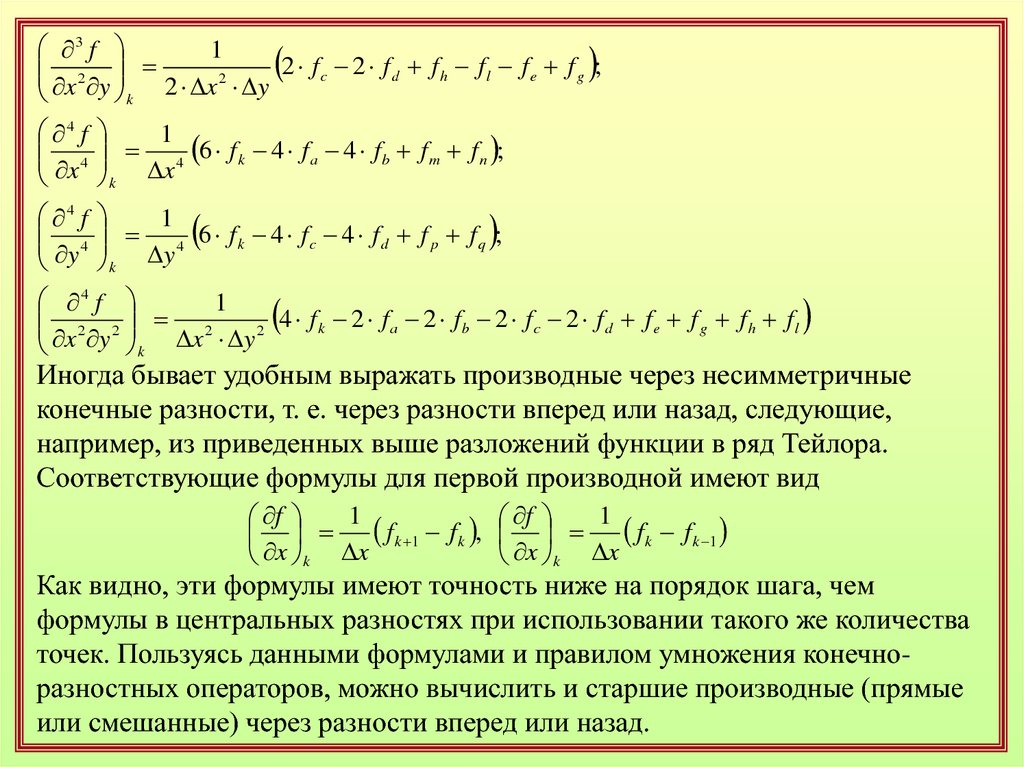
Иногда бывает удобным выражать производные через несимметричные
конечные разности, т. е. через разности вперед или назад, следующие,
например, из приведенных выше разложений функции в ряд Тейлора.
Соответствующие формулы для первой производной имеют вид
1
f
f k 1 f k , f 1 f k f k 1
x k x
x k x
Как видно, эти формулы имеют точность ниже на порядок шага, чем
формулы в центральных разностях при использовании такого же количества
точек. Пользуясь данными формулами и правилом умножения конечноразностных операторов, можно вычислить и старшие производные (прямые
или смешанные) через разности вперед или назад.
21.
Таким образом, на основании полученных выражений можно записать вконечных разностях любые производные функций, входящих в различные
соотношения строительной механики, в частности, в дифференциальное
уравнение, дифференциальные выражения для граничных условий или в
подынтегральное выражение функционала потенциальной энергии. Характер
использования приведенных формул зависит от принятого метода решения
конкретной задачи.
Рассмотрим дискретный метод, основанный на численном решении
дифференциальных уравнений (обыкновенных или в частных производных)
в задачах о напряженно-деформированном состоянии или устойчивости
упругой системы. Решение состоит в сведении дифференциальных
уравнений вместе с соответствующими граничными условиями к системе
алгебраических уравнений. При этом, если система описывается
обыкновенными дифференциальными уравнениями, соответствующий
метод носит название метода конечных разностей, а если решаются
уравнения в частных производных, он называется также методом сеток. В
первом случае интервал интегрирования делится на участки длиной Δх, а во
втором — область, занимаемая телом, делится ортогональной сеткой на
прямоугольники со сторонами Δх,Δy (как при выводе конечно разностных
выражений для производных).
22.
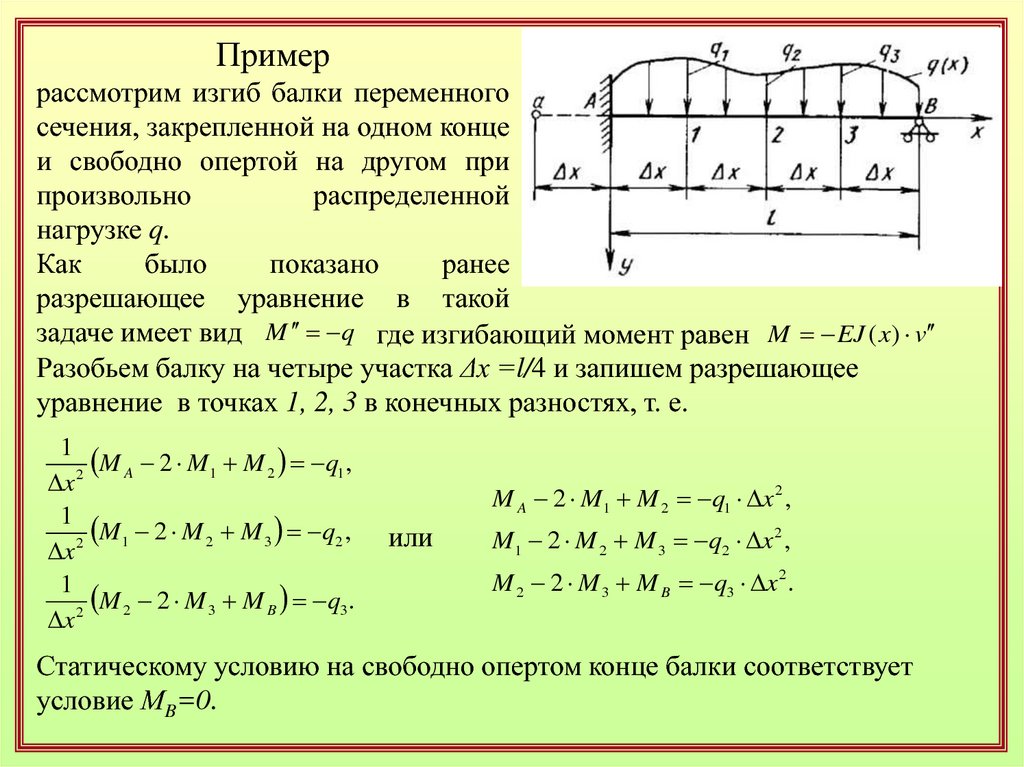
Примеррассмотрим изгиб балки переменного
сечения, закрепленной на одном конце
и свободно опертой на другом при
произвольно
распределенной
нагрузке q.
Как
было
показано
ранее
разрешающее уравнение в такой
задаче имеет вид M q где изгибающий момент равен M EJ ( x) v
Разобьем балку на четыре участка Δх =l/4 и запишем разрешающее
уравнение в точках 1, 2, 3 в конечных разностях, т. е.
1
M A 2 M 1 M 2 q1 ,
2
x
1
M 1 2 M 2 M 3 q 2 ,
2
x
1
M 2 2 M 3 M B q3.
2
x
M A 2 M 1 M 2 q1 x 2 ,
или
M 1 2 M 2 M 3 q2 x 2 ,
M 2 2 M 3 M B q3 x 2 .
Статическому условию на свободно опертом конце балки соответствует
условие МB=0.
23.
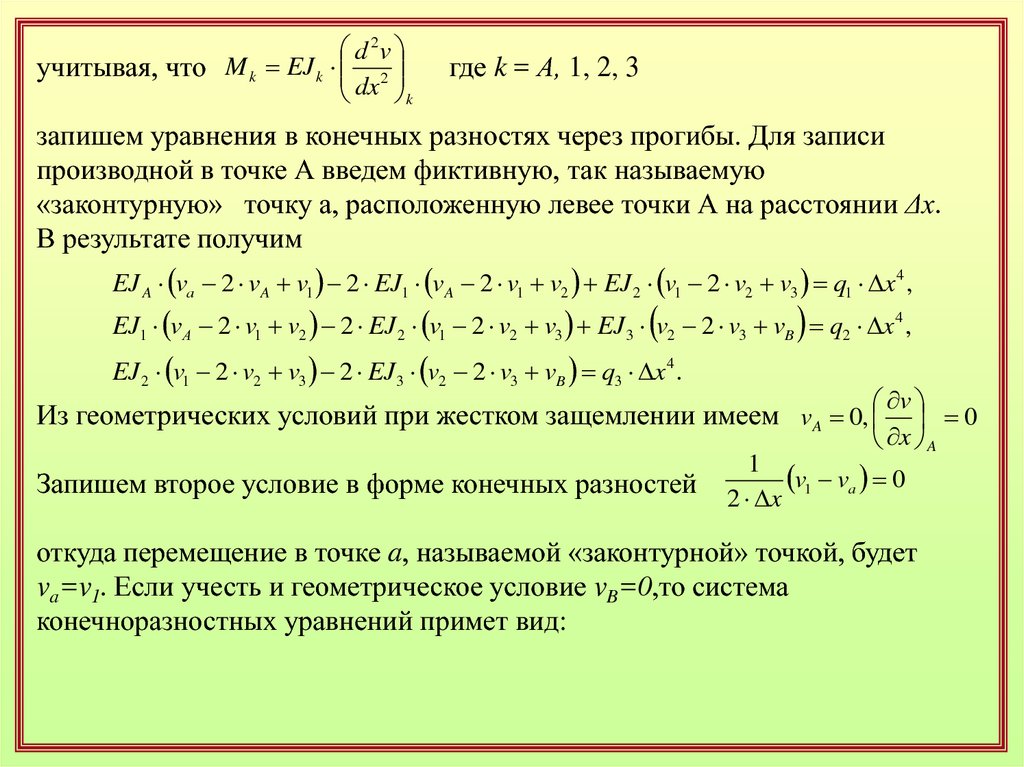
d 2vучитывая, что M k EJ k 2
dx k
где k = А, 1, 2, 3
запишем уравнения в конечных разностях через прогибы. Для записи
производной в точке А введем фиктивную, так называемую
«законтурную» точку а, расположенную левее точки А на расстоянии Δх.
В результате получим
EJ A va 2 v A v1 2 EJ1 v A 2 v1 v2 EJ 2 v1 2 v2 v3 q1 x 4 ,
EJ1 v А 2 v1 v2 2 EJ 2 v1 2 v2 v3 EJ 3 v2 2 v3 vB q2 x 4 ,
EJ 2 v1 2 v2 v3 2 EJ 3 v2 2 v3 vB q3 x 4 .
v
0
x A
Из геометрических условий при жестком защемлении имеем vA 0,
Запишем второе условие в форме конечных разностей
1
v1 va 0
2 x
откуда перемещение в точке a, называемой «законтурной» точкой, будет
va=v1. Если учесть и геометрическое условие vB=0,то система
конечноразностных уравнений примет вид:
24.
EJ A 2 v1 2 EJ1 v2 2 v1 EJ 2 v1 2 v2 v3 q1 x 4 ,EJ1 v2 2 v1 2 EJ 2 v1 2 v2 v3 EJ 3 v2 2 v3 q2 x 4 ,
EJ 2 v1 2 v2 v3 2 EJ 3 v2 2 v3 q3 x 4 .
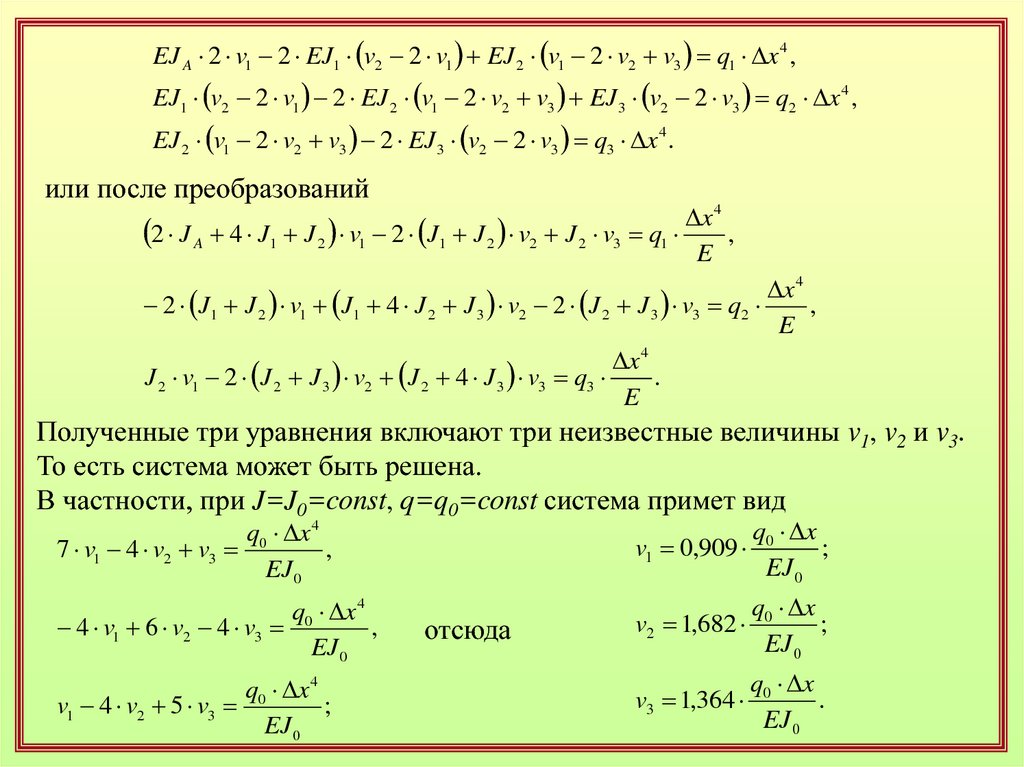
или после преобразований
x 4
2 J A 4 J1 J 2 v1 2 J1 J 2 v2 J 2 v3 q1 ,
E
x 4
2 J1 J 2 v1 J1 4 J 2 J 3 v2 2 J 2 J 3 v3 q2
,
E
x 4
J 2 v1 2 J 2 J 3 v2 J 2 4 J 3 v3 q3
.
E
Полученные три уравнения включают три неизвестные величины v1, v2 и v3.
То есть система может быть решена.
В частности, при J=J0=const, q=q0=const система примет вид
q0 x 4
7 v1 4 v2 v3
,
EJ 0
v1 0,909
q0 x
;
EJ 0
q0 x 4
4 v1 6 v2 4 v3
,
EJ 0
v2 1,682
q0 x
;
EJ 0
v3 1,364
q 0 x
.
EJ 0
q0 x 4
v1 4 v2 5 v3
;
EJ 0
отсюда
25.
По найденному прогибу можно определить в каждом сечении изгибающиймомент, а следовательно, и напряжения. Например, в сечении А имеем
d 2v
M A EJ A 2
dx А
или в форме конечных разностей
M A EJ A
1
va v1 2 vА
x 2
В частности, при J J 0 , q q0 M А 1,818 q0 x 2 0,114 q0 l 2
(точное значение ) M А 0,125 q0 l 2
26.
2.2 Вариационно-разностный методМетод представляет собой сочетание вариационного и конечно-разностного
методов и применяется для решения как одномерных, так и двумерных задач.
Согласно этому методу производные искомой функции, входящие в
подынтегральное выражение функционала полной энергии, записываются в
форме конечных разностей, а соответствующий интеграл заменяется суммой.
Далее на основании соответствующего вариационного принципа
определяются значения искомой функции в узлах сетки, соответствующие
экстремуму дискретного аналога функционала. Алгебраические уравнения, из
которых определяются эти значения, получаются из условий минимума, т. е.
I
0,
f i
где i — номер узла сетки; fi — значение искомой функции в i-м узле;
I–дискретный аналог функционала полной энергии. Так как I зависит
квадратично от fi, то условия минимума обеспечивают линейность
алгебраических уравнений.
27.
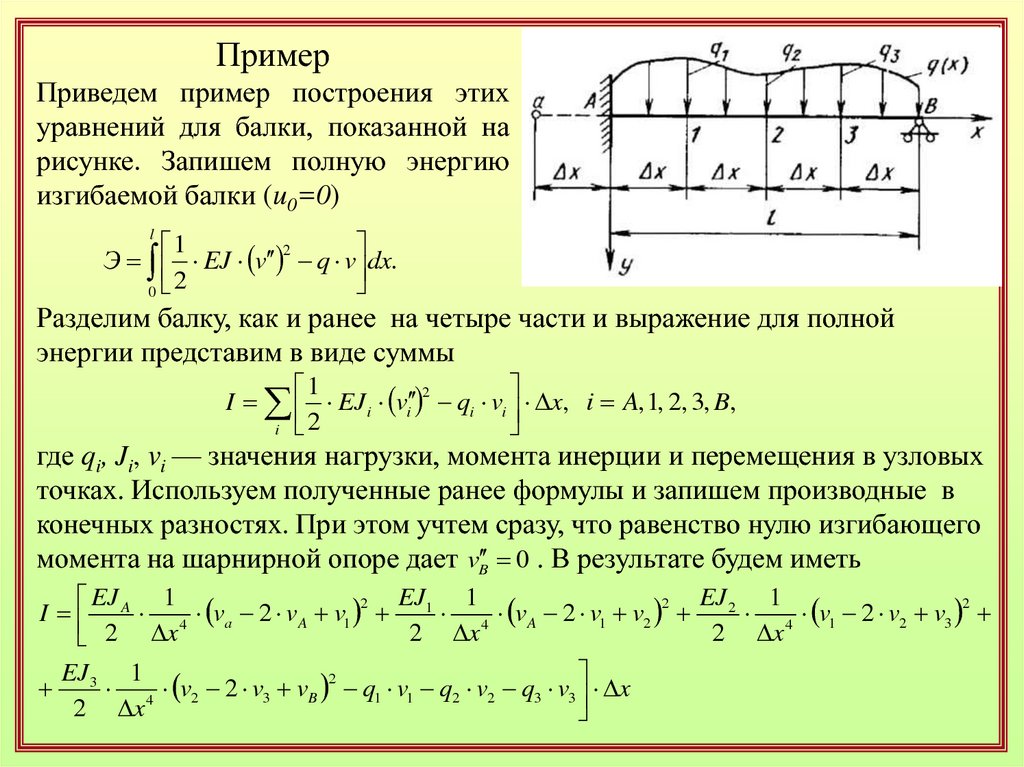
ПримерПриведем пример построения этих
уравнений для балки, показанной на
рисунке. Запишем полную энергию
изгибаемой балки (u0=0)
1
2
Э EJ v q v dx.
2
0
l
Разделим балку, как и ранее на четыре части и выражение для полной
энергии представим в виде суммы
1
2
I EJ i vi qi vi x, i A, 1, 2, 3, B,
i 2
где qi, Ji, vi — значения нагрузки, момента инерции и перемещения в узловых
точках. Используем полученные ранее формулы и запишем производные в
конечных разностях. При этом учтем сразу, что равенство нулю изгибающего
момента на шарнирной опоре дает v B 0 . В результате будем иметь
1
EJ
1
EJ
1
EJ
2
2
2
I A 4 va 2 v A v1 1 4 v A 2 v1 v2 2 4 v1 2 v2 v3
2 x
2 x
2 x
EJ
1
2
3 4 v2 2 v3 vB q1 v1 q2 v2 q3 v3 x
2 x
28.
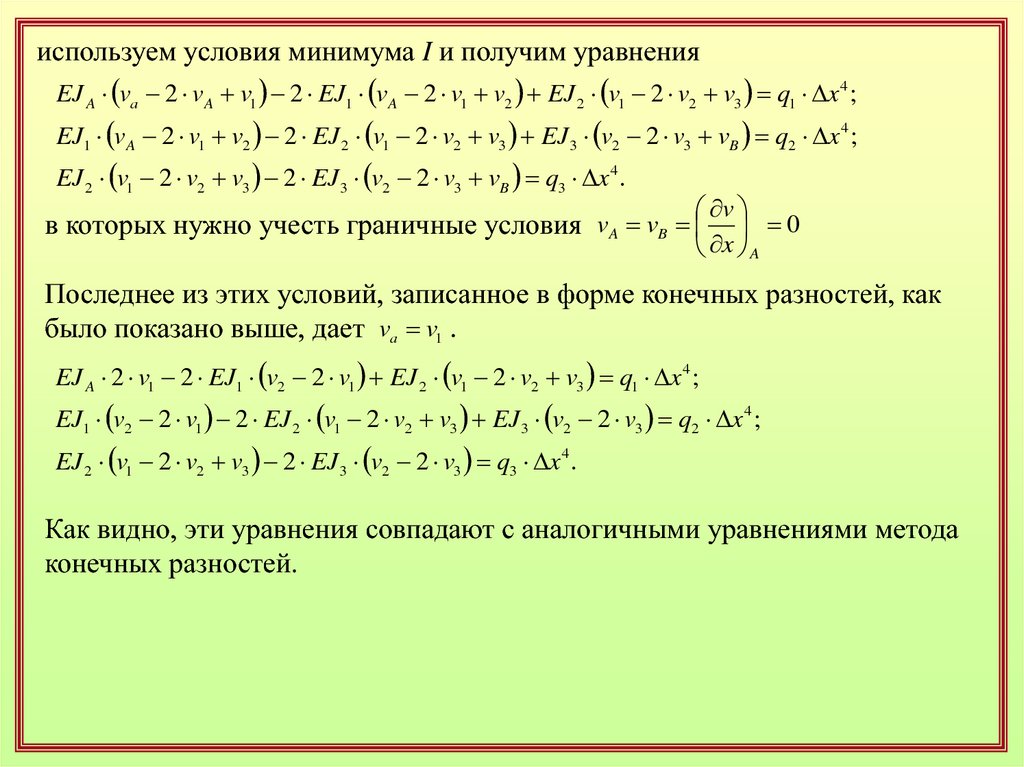
используем условия минимума I и получим уравненияEJ A va 2 v A v1 2 EJ1 v A 2 v1 v2 EJ 2 v1 2 v2 v3 q1 x 4 ;
EJ1 v A 2 v1 v2 2 EJ 2 v1 2 v2 v3 EJ 3 v2 2 v3 vB q2 x 4 ;
EJ 2 v1 2 v2 v3 2 EJ 3 v2 2 v3 vB q3 x 4 .
v
в которых нужно учесть граничные условия vA vB 0
x A
Последнее из этих условий, записанное в форме конечных разностей, как
было показано выше, дает va v1 .
EJ A 2 v1 2 EJ1 v2 2 v1 EJ 2 v1 2 v2 v3 q1 x 4 ;
EJ1 v2 2 v1 2 EJ 2 v1 2 v2 v3 EJ 3 v2 2 v3 q2 x 4 ;
EJ 2 v1 2 v2 v3 2 EJ 3 v2 2 v3 q3 x 4 .
Как видно, эти уравнения совпадают с аналогичными уравнениями метода
конечных разностей.
29.
2.3 Дифференциально-разностный метод (метод прямых)Метод применяется для решения неодномерных задач, описываемых
уравнениями с частными производными. Решение при этом сводится к
решению системы обыкновенных дифференциальных уравнений. Для этого
рассматриваемое тело (пластина или оболочка) вдоль одного из направлений
разбивается на полосы выбранной ширины (шаг разбиения). Границы этих
полос представляют собой линии (в частности, прямые), параллельные
другому направлению. Если производные исходного уравнения записать по
порядку разбиения в форме конечных разностей, то для другого порядка
разбиения получим систему обыкновенных дифференциальных уравнений (т.
е. уравнений вдоль линий). Граничные условия задачи в одном направлении
учитываются при записи производных в форме конечных разностей, а в
другом— при решении соответствующих обыкновенных дифференциальных
уравнений.
30.
ПримерВ качестве примера рассмотрим уравнение
Пуассона, с которым связано решение ряда
задач теории упругости и строительной
механики. В частности, для задачи о
перемещениях мембраны это уравнение
имеет вид
2w 2w
q
x 2 y 2
N
где q, N — внешнее поперечное давление и внутренние нормальные усилия;
w(х,у) — искомая, функция прогибов.
Будем считать, что прямоугольная мембрана по краям жестко закреплена (см.
рис). Приведем прямые у0=0, у1=-b/4, у2=b/4, у3=-b/2, у4=b/2. Разделив
мембрану на четыре полосы шириной Δу=b/4, и запишем уравнение
Пуассона в форме конечных разностей в направлении оси у.
2 w0
1
q
w
2
w
w
;
1
0
2
x 2 y 2
N
2 w2
1
q
w
2
w
w
.
0
2
4
x 2 y 2
N
2 w1
1
q
w
2
w
w
;
3
1
0
x 2 y 2
N
31.
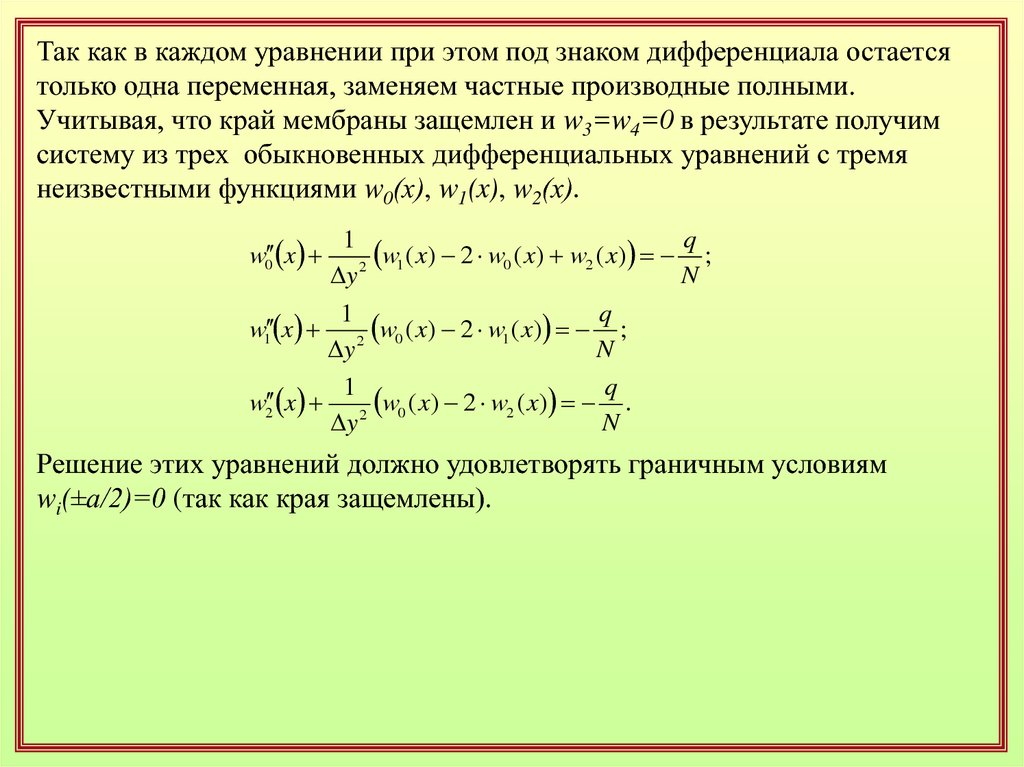
Так как в каждом уравнении при этом под знаком дифференциала остаетсятолько одна переменная, заменяем частные производные полными.
Учитывая, что край мембраны защемлен и w3=w4=0 в результате получим
систему из трех обыкновенных дифференциальных уравнений с тремя
неизвестными функциями w0(х), w1(x), w2(х).
w0 x
1
q
w
(
x
)
2
w
(
x
)
w
(
x
)
;
1
0
2
y 2
N
1
q
w1 x 2 w0 ( x) 2 w1 ( x) ;
y
N
1
q
w2 x 2 w0 ( x) 2 w2 ( x) .
y
N
Решение этих уравнений должно удовлетворять граничным условиям
wi(±а/2)=0 (так как края защемлены).
32.
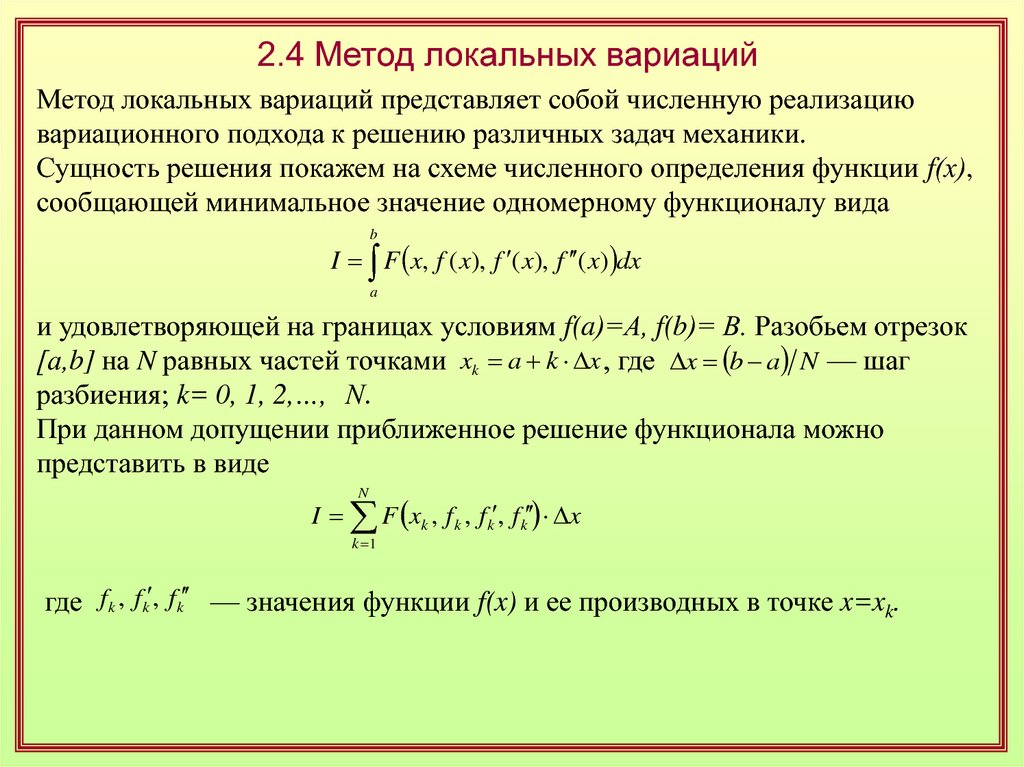
2.4 Метод локальных вариацийМетод локальных вариаций представляет собой численную реализацию
вариационного подхода к решению различных задач механики.
Сущность решения покажем на схеме численного определения функции f(х),
сообщающей минимальное значение одномерному функционалу вида
b
I F x, f ( x), f ( x), f ( x) dx
a
и удовлетворяющей на границах условиям f(a)=А, f(b)= В. Разобьем отрезок
[а,b] на N равных частей точками xk a k x , где x b a N — шаг
разбиения; k= 0, 1, 2,…, Ν.
При данном допущении приближенное решение функционала можно
представить в виде
N
I F xk , f k , f k , f k x
k 1
где f k , f k , f k — значения функции f(x) и ее производных в точке x=xk.
33.
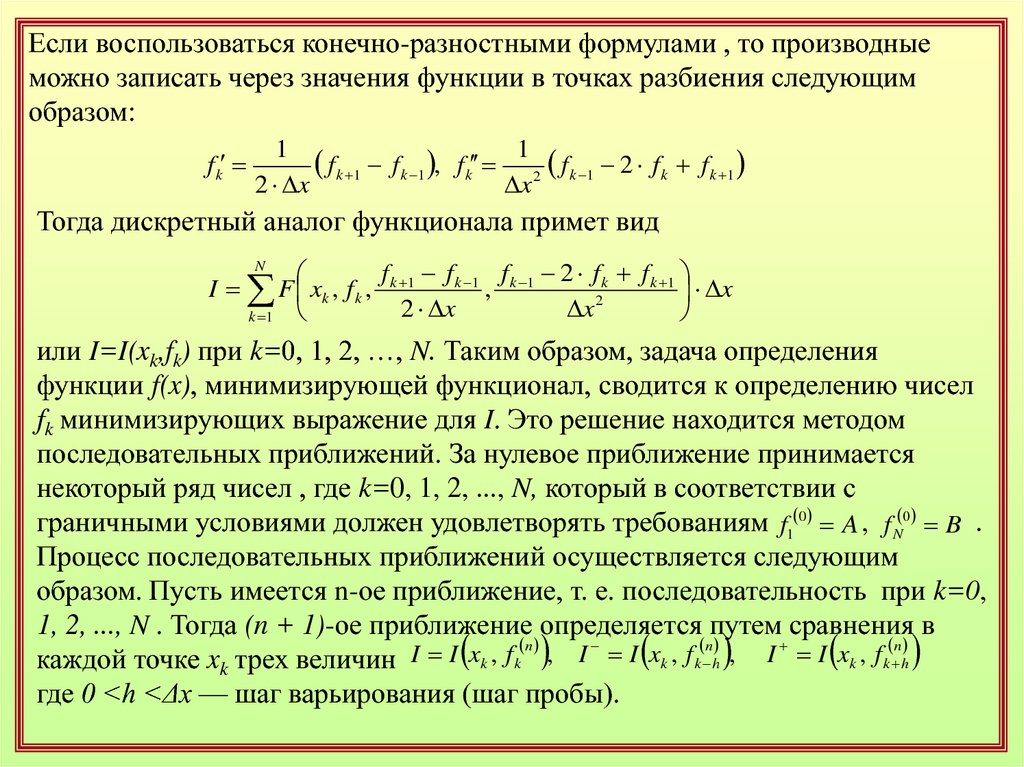
Если воспользоваться конечно-разностными формулами , то производныеможно записать через значения функции в точках разбиения следующим
образом:
f k
1
f k 1 f k 1 , f k 1 2 f k 1 2 f k f k 1
2 x
x
Тогда дискретный аналог функционала примет вид
f f k 1 f k 1 2 f k f k 1
I F xk , f k , k 1
,
x
2
2
x
x
k 1
N
или I=I(xk,fk) при k=0, 1, 2, …, N. Таким образом, задача определения
функции f(x), минимизирующей функционал, сводится к определению чисел
fk минимизирующих выражение для I. Это решение находится методом
последовательных приближений. За нулевое приближение принимается
некоторый ряд чисел , где k=0, 1, 2, ..., N, который в соответствии с
граничными условиями должен удовлетворять требованиям f1 0 A , f N 0 B .
Процесс последовательных приближений осуществляется следующим
образом. Пусть имеется n-ое приближение, т. е. последовательность при k=0,
1, 2, ..., N . Тогда (n + 1)-ое приближение определяется путем сравнения в
n
n
n
каждой точке xk трех величин I I xk , f k , I I xk , f k h , I I xk , f k h
где 0 <h <Δх — шаг варьирования (шаг пробы).
34.
nn
n
В каждой точке из трех значений f k , f k h , f k h для (n+1)-го приближения
берется то значение, которое дает меньшую из трех величин I, I+, I- . При
фиксированном h приближения проводятся до тех пор, пока I, I+, Iстановятся (с заданной точностью) равными. После этого шаг уменьшают и
проводится очередная серия приближений. Весь процесс приближений
заканчивается при совпадении (с заданной точностью) значений всех или I,
I+, I- в двух последующих приближениях при достаточно малых h и Δx.
35.
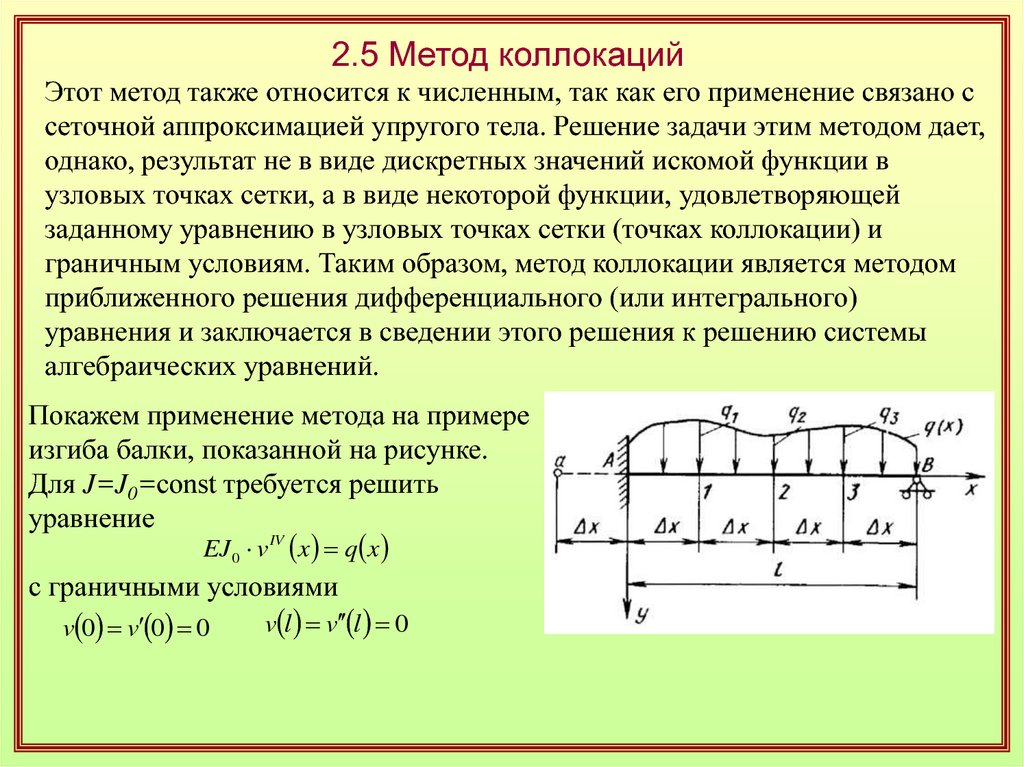
2.5 Метод коллокацийЭтот метод также относится к численным, так как его применение связано с
сеточной аппроксимацией упругого тела. Решение задачи этим методом дает,
однако, результат не в виде дискретных значений искомой функции в
узловых точках сетки, а в виде некоторой функции, удовлетворяющей
заданному уравнению в узловых точках сетки (точках коллокации) и
граничным условиям. Таким образом, метод коллокации является методом
приближенного решения дифференциального (или интегрального)
уравнения и заключается в сведении этого решения к решению системы
алгебраических уравнений.
Покажем применение метода на примере
изгиба балки, показанной на рисунке.
Для J=J0=const требуется решить
уравнение
EJ 0 v IV x q x
с граничными условиями
v 0 v 0 0
v l v l 0
36.
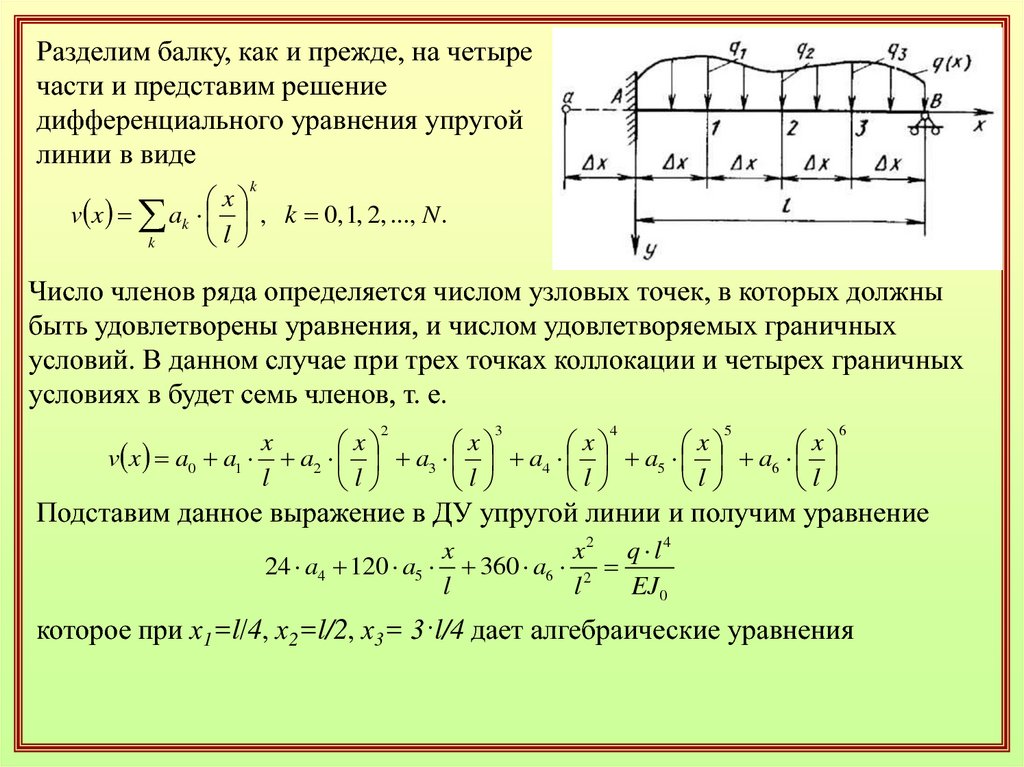
Разделим балку, как и прежде, на четыречасти и представим решение
дифференциального уравнения упругой
линии в виде
k
x
v x ak , k 0, 1, 2, ..., N .
l
k
Число членов ряда определяется числом узловых точек, в которых должны
быть удовлетворены уравнения, и числом удовлетворяемых граничных
условий. В данном случае при трех точках коллокации и четырех граничных
условиях в будет семь членов, т. е.
2
3
4
5
x
x
x
x
x
x
v x a0 a1 a2 a3 a4 a5 a6
l
l
l
l
l
l
6
Подставим данное выражение в ДУ упругой линии и получим уравнение
x
x2 q l 4
24 a4 120 a5 360 a6 2
l
l
EJ 0
которое при х1=l/4, х2=l/2, х3= 3·l/4 дает алгебраические уравнения
37.
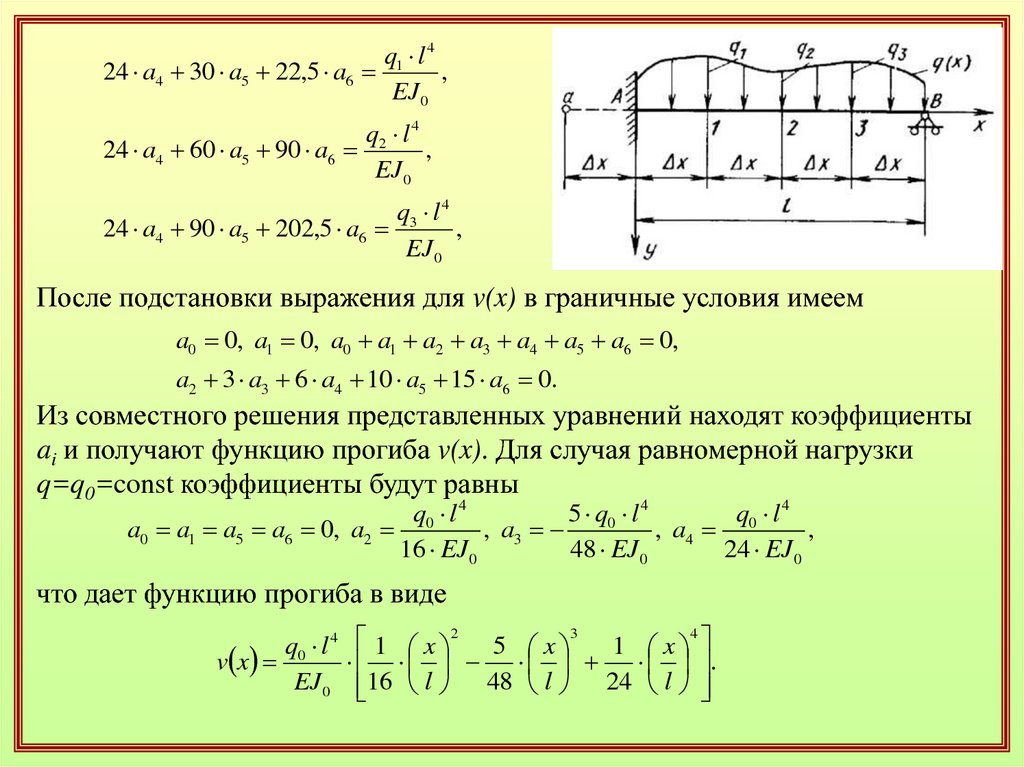
q1 l 424 a4 30 a5 22,5 a6
,
EJ 0
q2 l 4
24 a4 60 a5 90 a6
,
EJ 0
q3 l 4
24 a4 90 a5 202,5 a6
,
EJ 0
После подстановки выражения для v(x) в граничные условия имеем
a0 0, a1 0, a0 a1 a2 a3 a4 a5 a6 0,
a2 3 a3 6 a4 10 a5 15 a6 0.
Из совместного решения представленных уравнений находят коэффициенты
ai и получают функцию прогиба v(x). Для случая равномерной нагрузки
q=q0=const коэффициенты будут равны
q0 l 4
5 q0 l 4
q0 l 4
a0 a1 a5 a6 0, a2
, a3
, a4
,
16 EJ 0
48 EJ 0
24 EJ 0
что дает функцию прогиба в виде
q0 l 4
v x
EJ 0
1 x 2 5 x 3 1 x 4
.
16 l 48 l 24 l