 informatics
informaticsSimilar presentations:


")



")
")


Законы регулирования
1.
ФГБОУ ВПО «Воронежский государственныйаграрный университет имени императора Петра I»
Кафедра электротехники и автоматики
Аксенов Игорь Игоревич
ОСНОВЫ ТАУ
Законы регулирования
г. Воронеж
2.
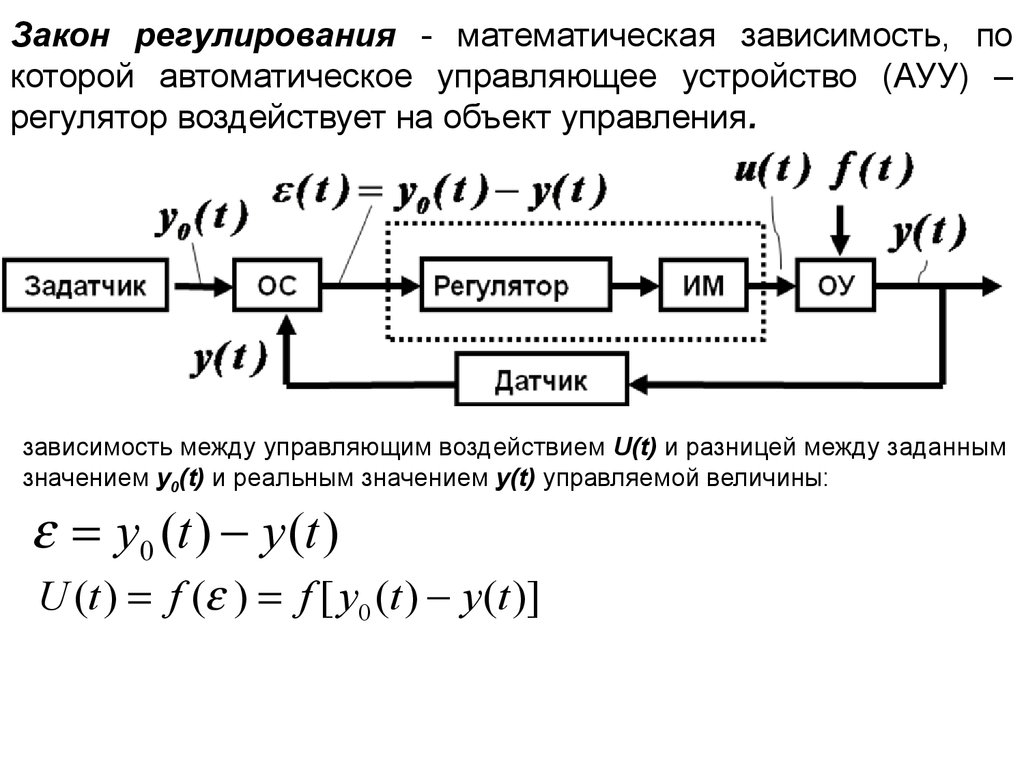
Закон регулирования - математическая зависимость, покоторой автоматическое управляющее устройство (АУУ) –
регулятор воздействует на объект управления.
зависимость между управляющим воздействием U(t) и разницей между заданным
значением y0(t) и реальным значением y(t) управляемой величины:
y0 (t ) y (t )
U (t ) f ( ) f [ y0 (t ) y (t )]
3.
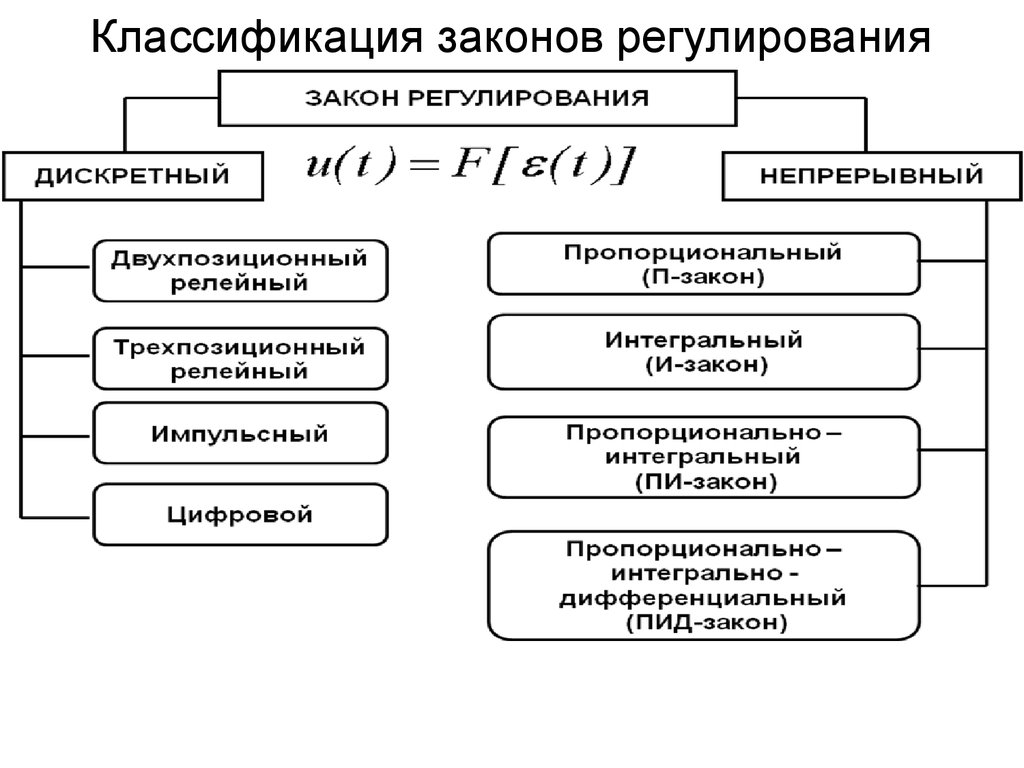
Классификация законов регулирования4.
Релейный закон регулирования (а), схема системы автоматическогорегулирования температуры (б) и кривые процесса регулирования (в)
5.
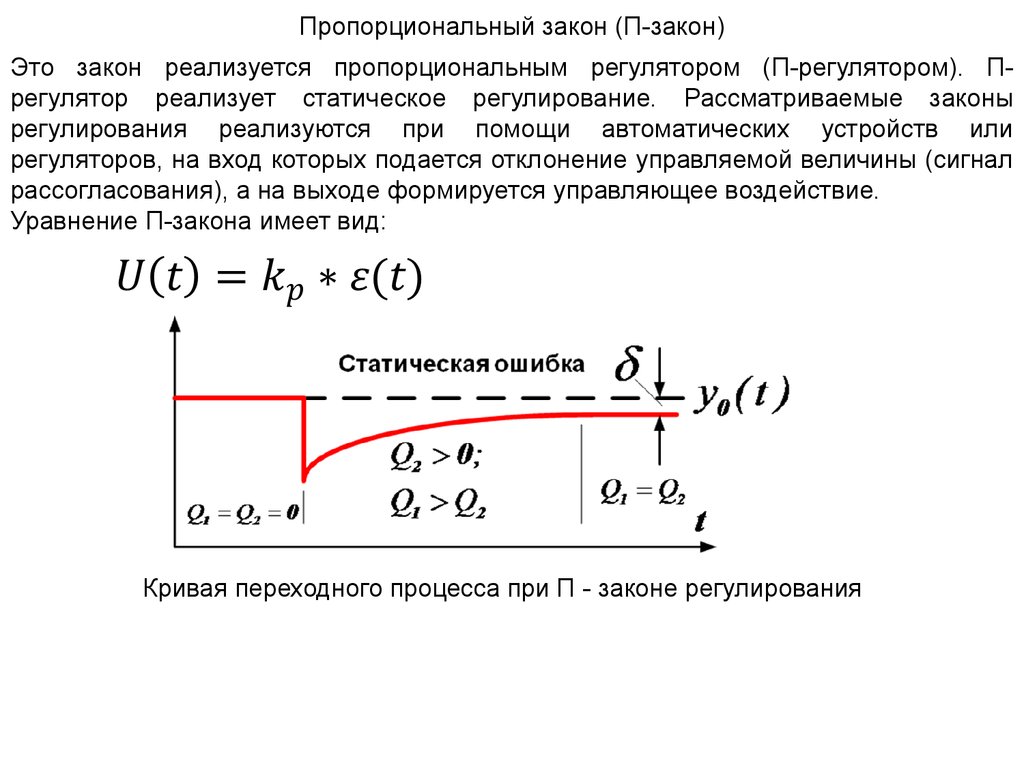
Пропорциональный закон (П-закон)Это закон реализуется пропорциональным регулятором (П-регулятором). Прегулятор реализует статическое регулирование. Рассматриваемые законы
регулирования реализуются при помощи автоматических устройств или
регуляторов, на вход которых подается отклонение управляемой величины (сигнал
рассогласования), а на выходе формируется управляющее воздействие.
Уравнение П-закона имеет вид:
Кривая переходного процесса при П - законе регулирования
6.
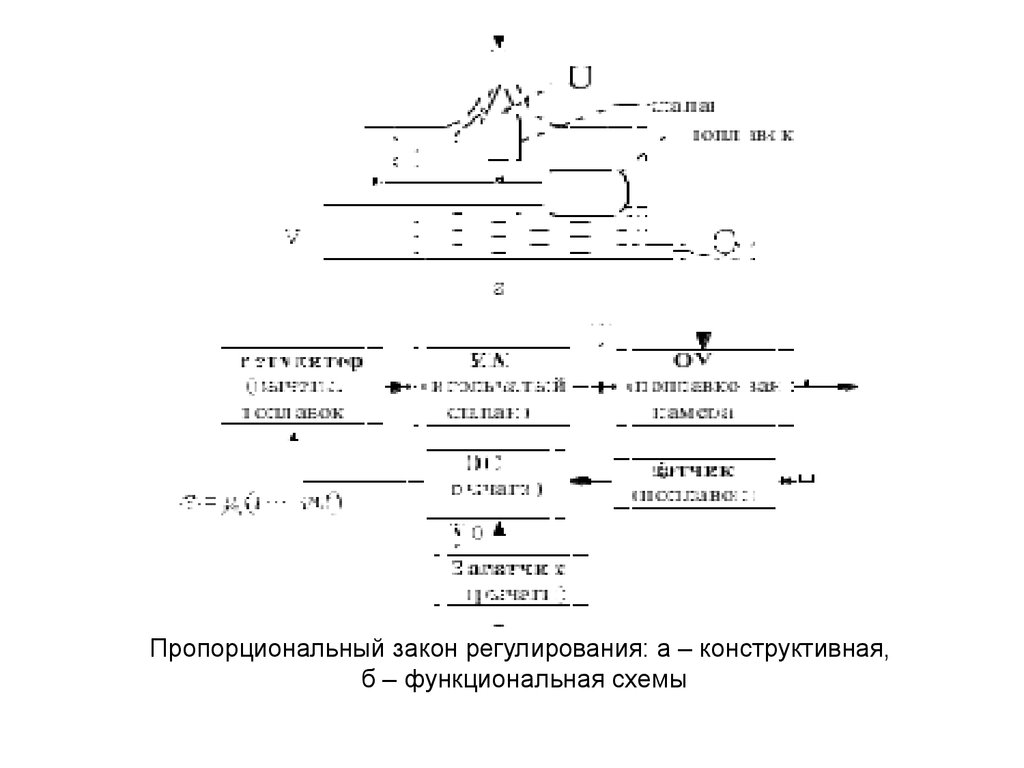
Пропорциональный закон регулирования: а – конструктивная,б – функциональная схемы
7.
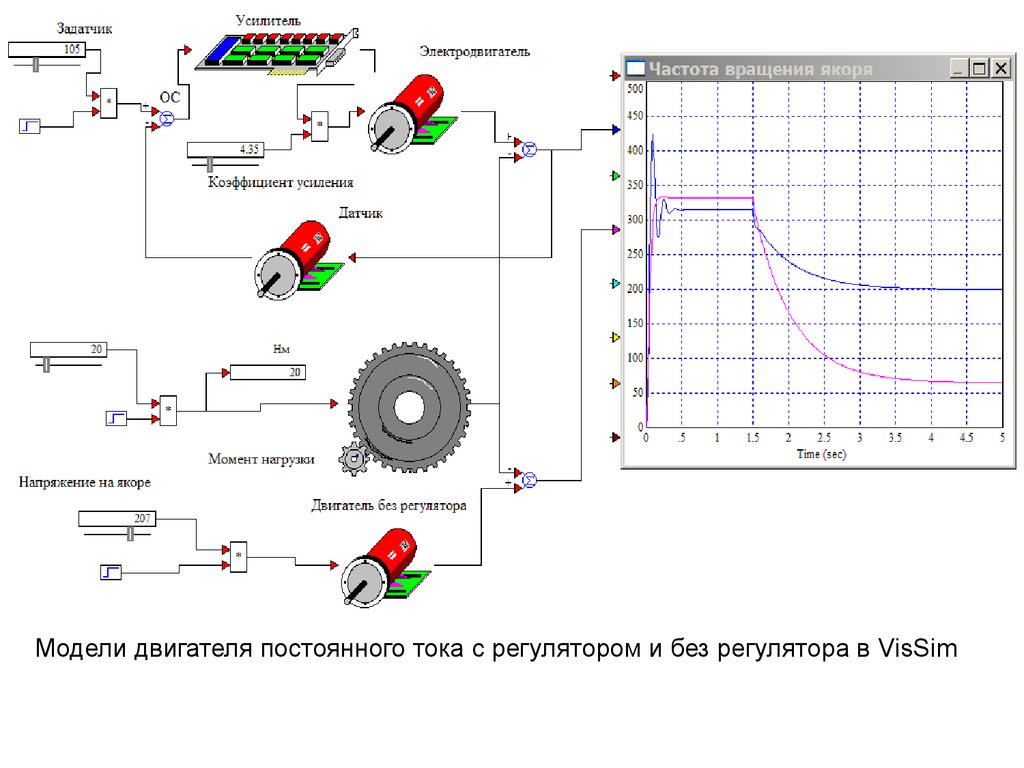
Модели двигателя постоянного тока с регулятором и без регулятора в VisSim8.
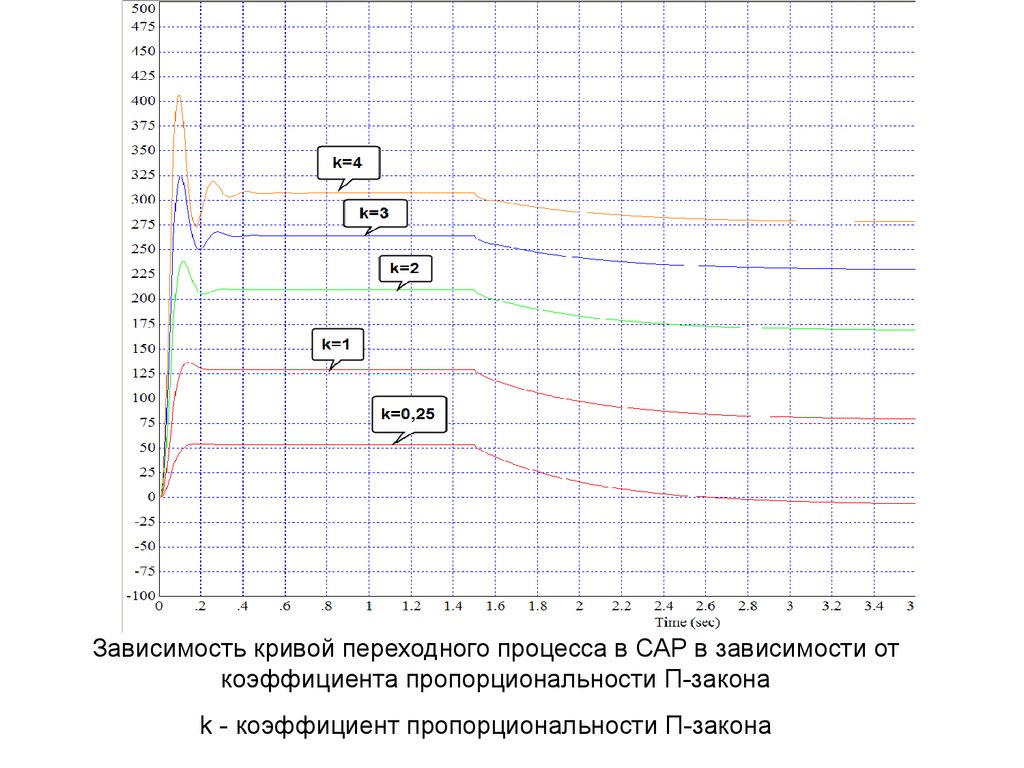
Зависимость кривой переходного процесса в САР в зависимости откоэффициента пропорциональности П-закона
k - коэффициент пропорциональности П-закона
9.
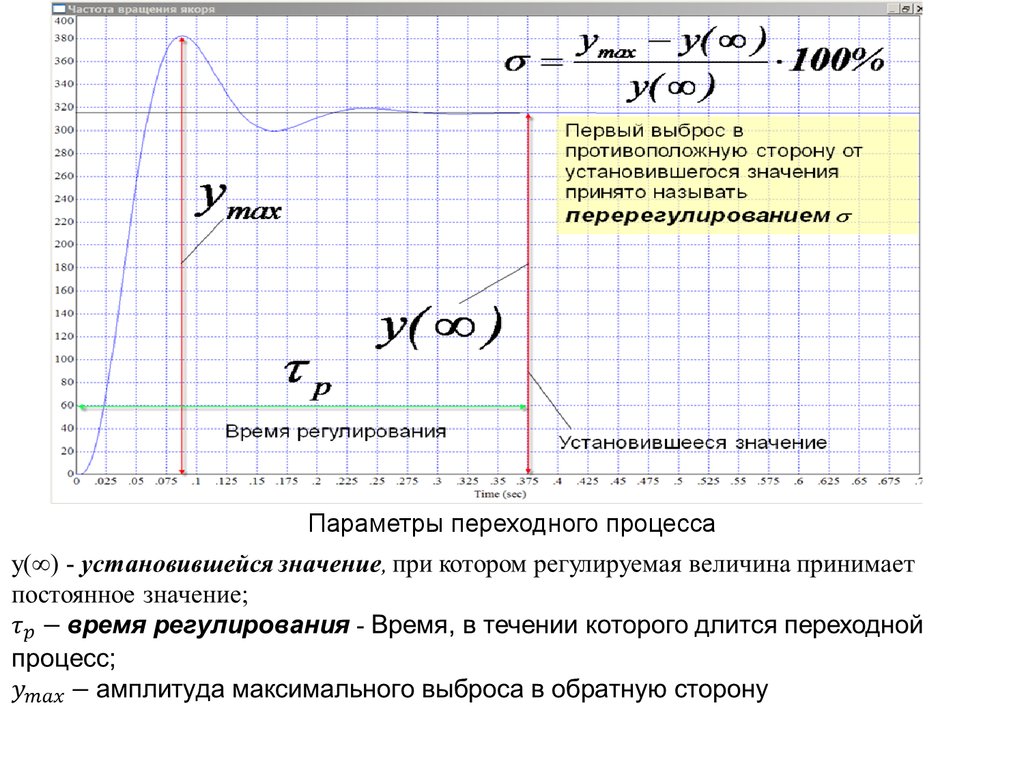
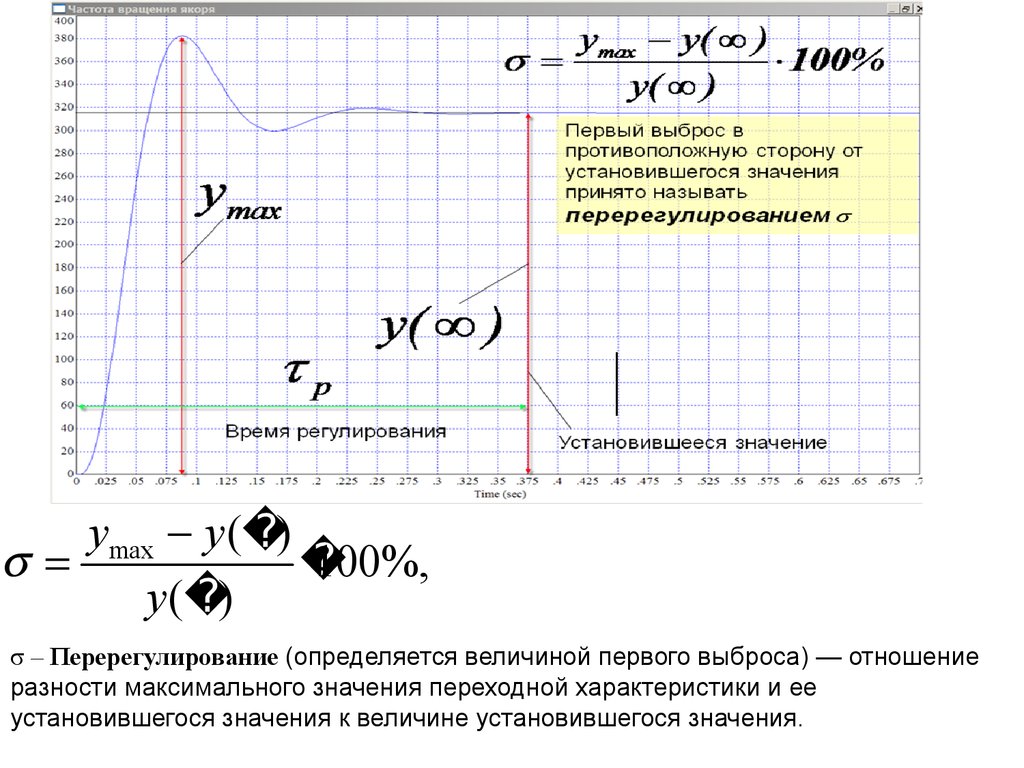
Параметры переходного процесса10.
ymax y ( )100%,
y ( )
σ – Перерегулирование (определяется величиной первого выброса) — отношение
разности максимального значения переходной характеристики и ее
установившегося значения к величине установившегося значения.
11.
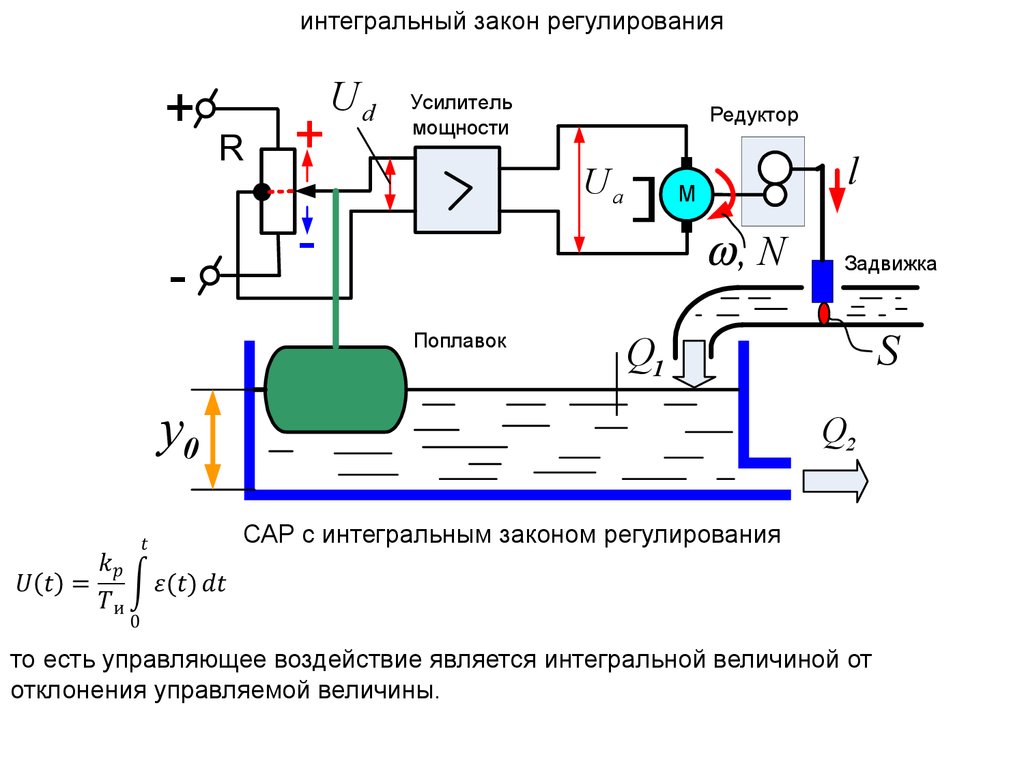
интегральный закон регулирования+
-
R
+
Ud
Усилитель
мощности
Редуктор
Ua
l
M
-
, N
Поплавок
Задвижка
S
Q1
y0
Q2
САР с интегральным законом регулирования
то есть управляющее воздействие является интегральной величиной от
отклонения управляемой величины.
12.
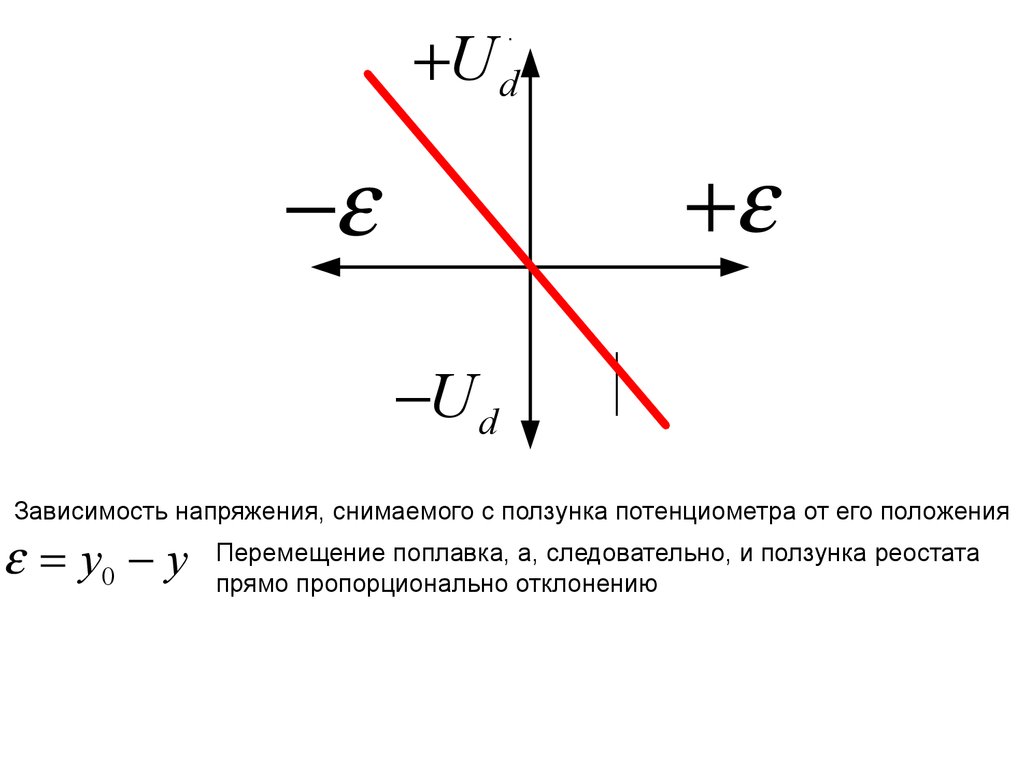
U d.
U d
Зависимость напряжения, снимаемого с ползунка потенциометра от его положения
y0 y
Перемещение поплавка, а, следовательно, и ползунка реостата
прямо пропорционально отклонению
13.
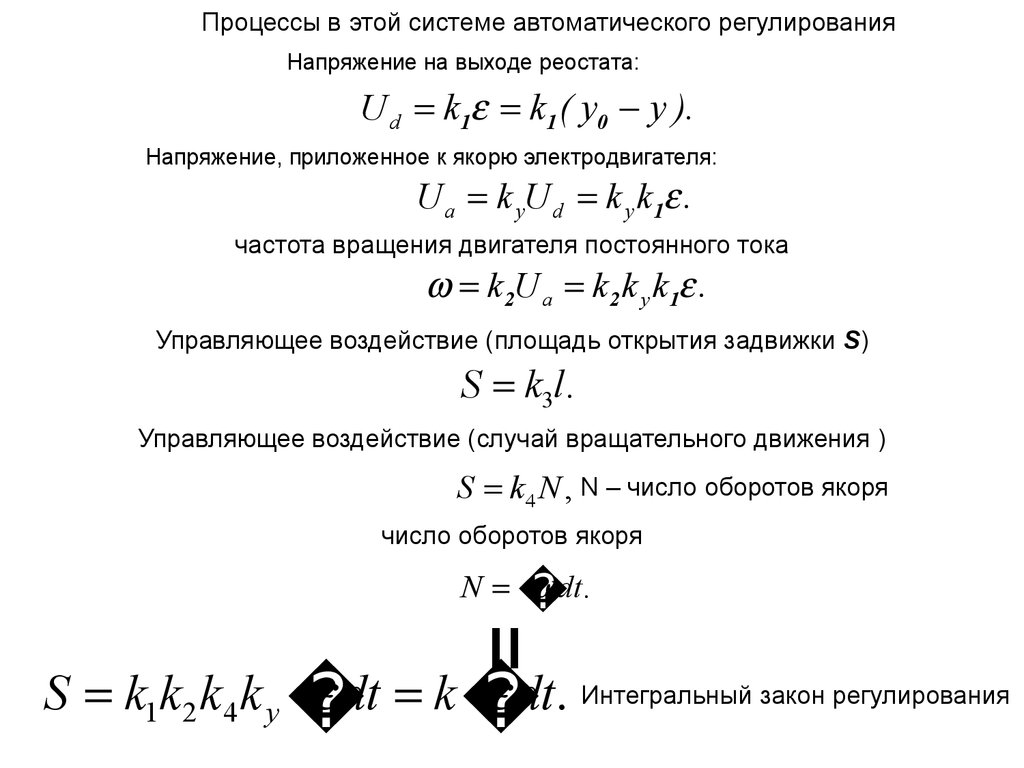
Процессы в этой системе автоматического регулированияНапряжение на выходе реостата:
U d k1 k1 ( y0 y ).
Напряжение, приложенное к якорю электродвигателя:
U a k yU d k y k1 .
частота вращения двигателя постоянного тока
k2U a k2 k y k1 .
Управляющее воздействие (площадь открытия задвижки S)
S k3l.
Управляющее воздействие (случай вращательного движения )
S k4 N , N – число оборотов якоря
число оборотов якоря
N
dt.
=
S k1k2 k4 k y
dt k
dt. Интегральный закон регулирования
14.
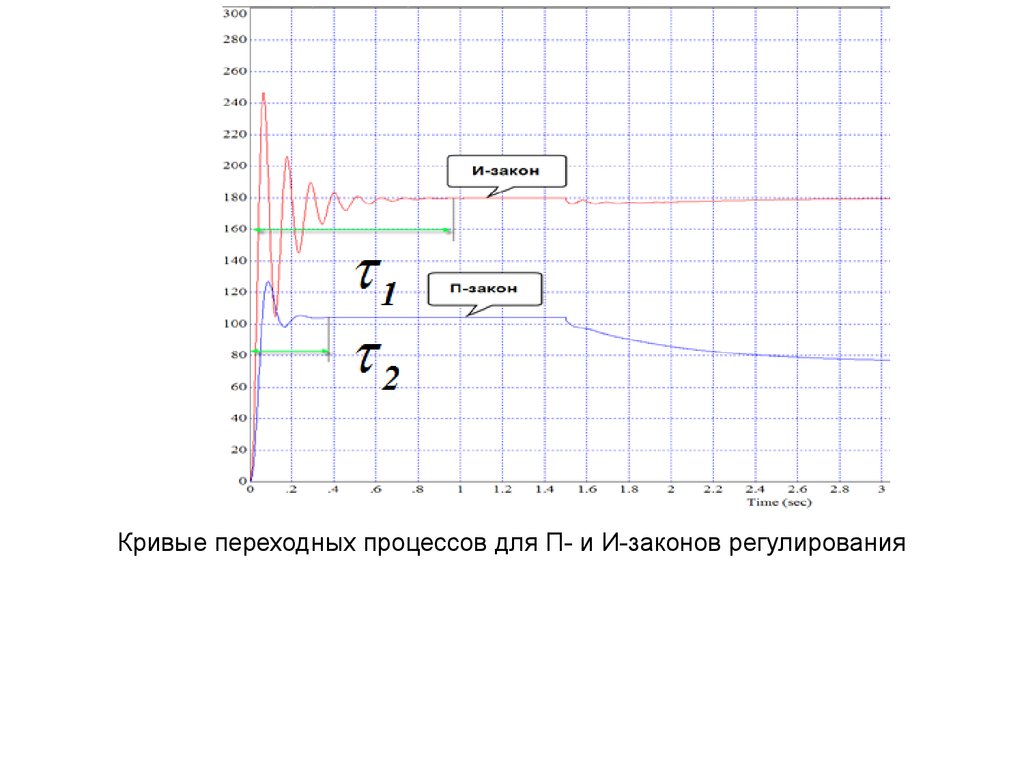
Кривые переходных процессов для П- и И-законов регулирования15.
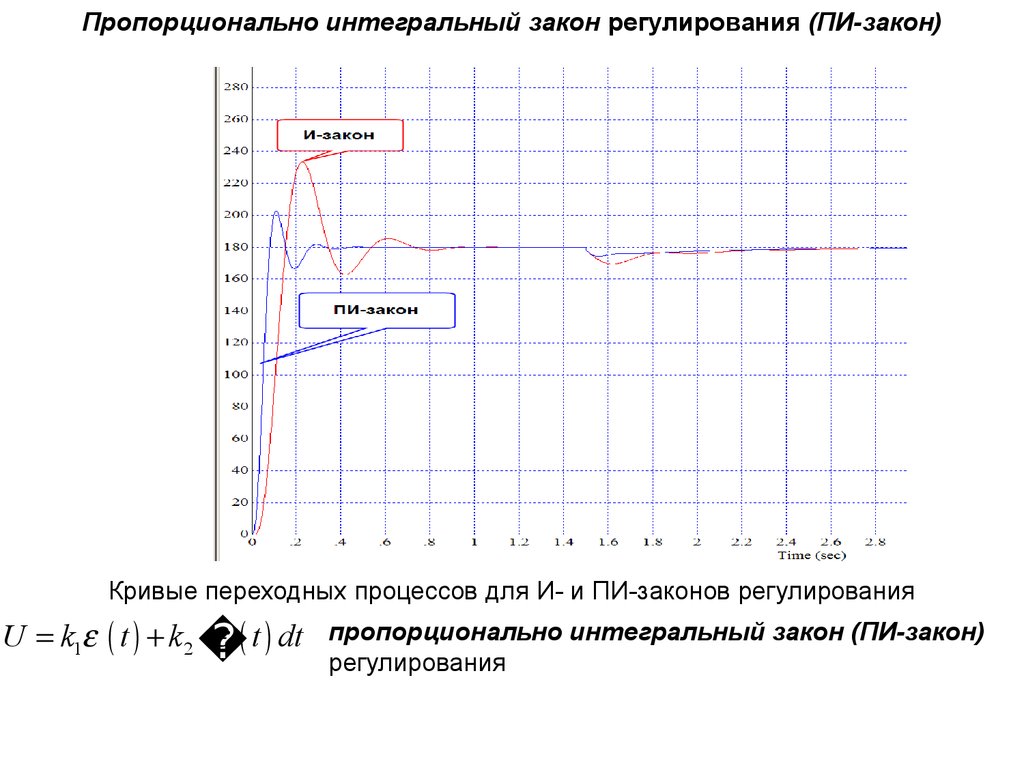
Пропорционально интегральный закон регулирования (ПИ-закон)Кривые переходных процессов для И- и ПИ-законов регулирования
U k1 t k 2
t dt
пропорционально интегральный закон (ПИ-закон)
регулирования
16.
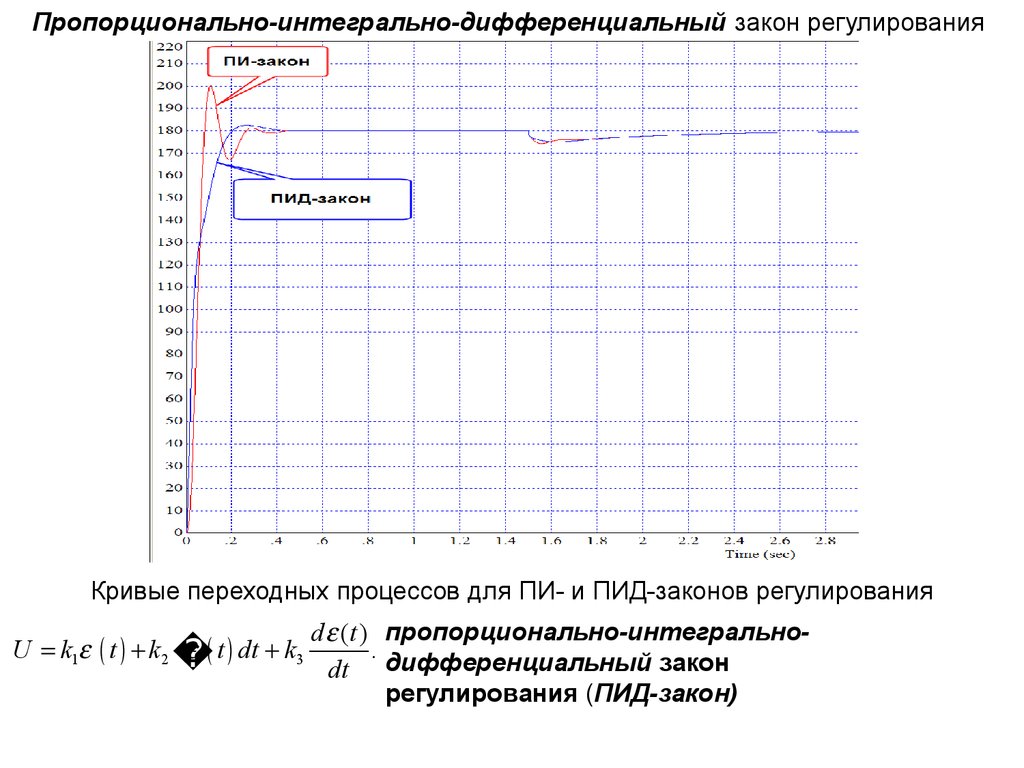
Пропорционально-интегрально-дифференциальный закон регулированияКривые переходных процессов для ПИ- и ПИД-законов регулирования
U k1 t k2
t dt k3
d (t ) пропорционально-интегрально.
dt дифференциальный закон
регулирования (ПИД-закон)