
 informatics
informatics electronics
electronicsSimilar presentations:


")




")

. Основные понятия")
Z-передаточная функция и весовая последовательность цифрового блока. (Лекция 6)
1. Z- передаточная функция и весовая последовательность цифрового блока.
Цифровой блокПредположим, что числовые последовательности на входе и выходе блока
связаны рекуррентным уравнением:
a 0 u[n] a1 u[n 1] a N u[n N] b 0 e[n] b1 e[n 1] b M e[n M],
a0 0 ,
n 0, 1, 2,
u[m] 0
и
e[m] 0
при
Применяем Z-преобразование и получаем:
a
0
m 0, N M
a1 z 1 a N z N U(z) b 0 b1 z -1 b M z -M E(z)
Передаточная функция блока равна отношению Z-преобразований сигналов:
b 0 b1 z -1 b M z -M b 0 z N b M z N-M
U(z)
D(z)
,
1
N
N
E(z)
a 0 a1 z a N z
a0 z aN
U(z) D(z) E(z)
2.
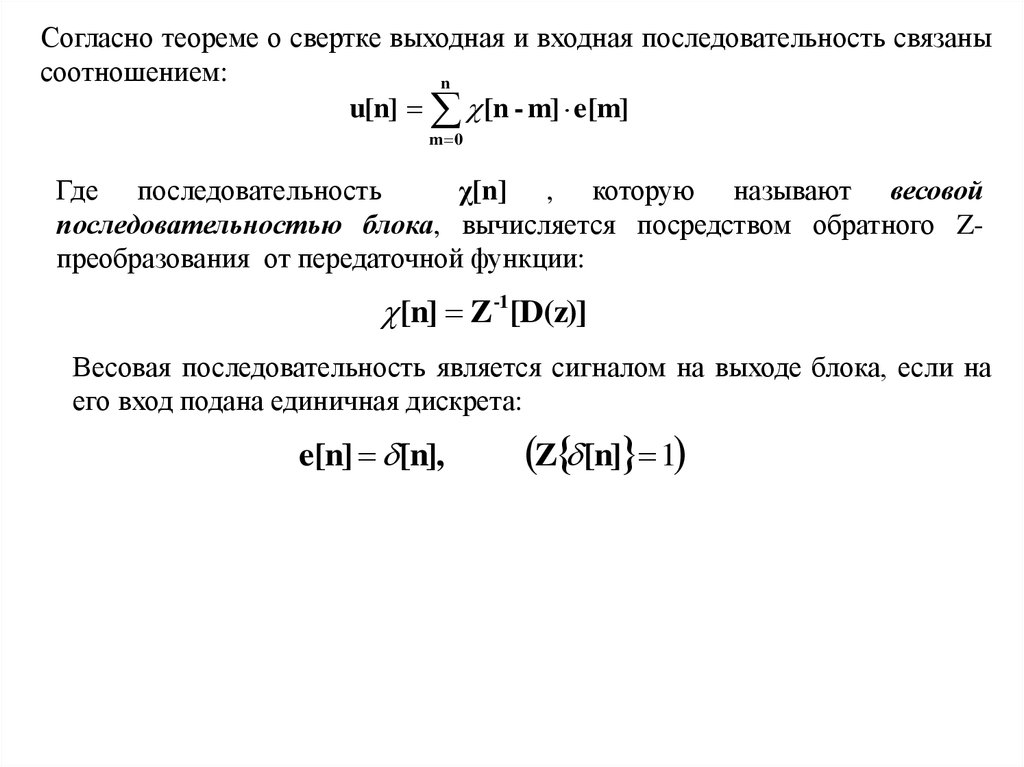
Согласно теореме о свертке выходная и входная последовательность связанысоотношением:
n
u[n] [n - m] e[m]
m 0
Где последовательность
χ[n] , которую называют весовой
последовательностью блока, вычисляется посредством обратного Zпреобразования от передаточной функции:
[n] Z-1[D(z)]
Весовая последовательность является сигналом на выходе блока, если на
его вход подана единичная дискрета:
e[n] [n],
Z [n] 1
3.
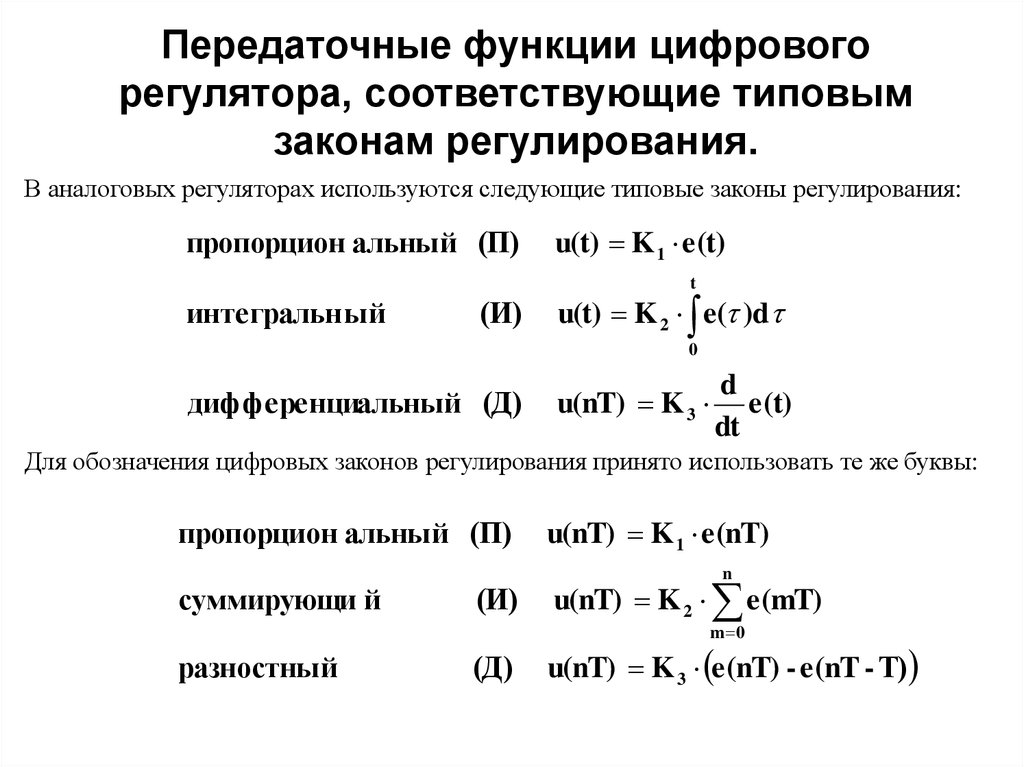
Передаточные функции цифровогорегулятора, соответствующие типовым
законам регулирования.
В аналоговых регуляторах используются следующие типовые законы регулирования:
пропорцион альный (П)
u(t) K 1 e(t)
t
интегральн ый
(И)
u(t) K 2 e( )d
0
дифференциальный (Д)
u(nT) K 3
d
e(t)
dt
Для обозначения цифровых законов регулирования принято использовать те же буквы:
пропорцион альный (П)
u(nT) K 1 e(nT)
n
суммирующи й
(И)
u(nT) K 2 e(mT)
m 0
разностный
(Д)
u(nT) K 3 e(nT) - e(nT - Т)
4.
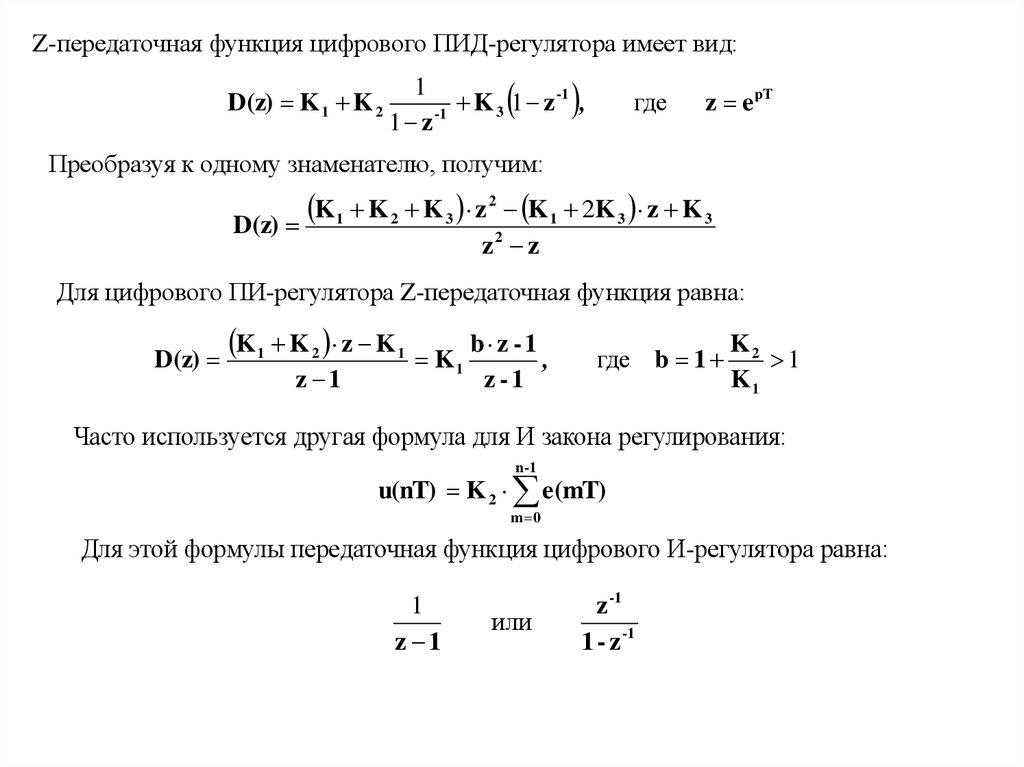
Z-передаточная функция цифрового ПИД-регулятора имеет вид:D(z) K 1 K 2
1
-1
K
1
z
,
3
-1
1 z
где
z epT
Преобразуя к одному знаменателю, получим:
K 1 K 2 K 3 z 2 K 1 2K 3 z K 3
D(z)
z2 z
Для цифрового ПИ-регулятора Z-передаточная функция равна:
D(z)
K 1 K 2 z K 1 K
z 1
b z -1
,
1
z -1
где b 1
K2
1
K1
Часто используется другая формула для И закона регулирования:
n -1
u(nT) K 2 e(mT)
m 0
Для этой формулы передаточная функция цифрового И-регулятора равна:
1
z 1
или
z -1
1 - z -1
5.
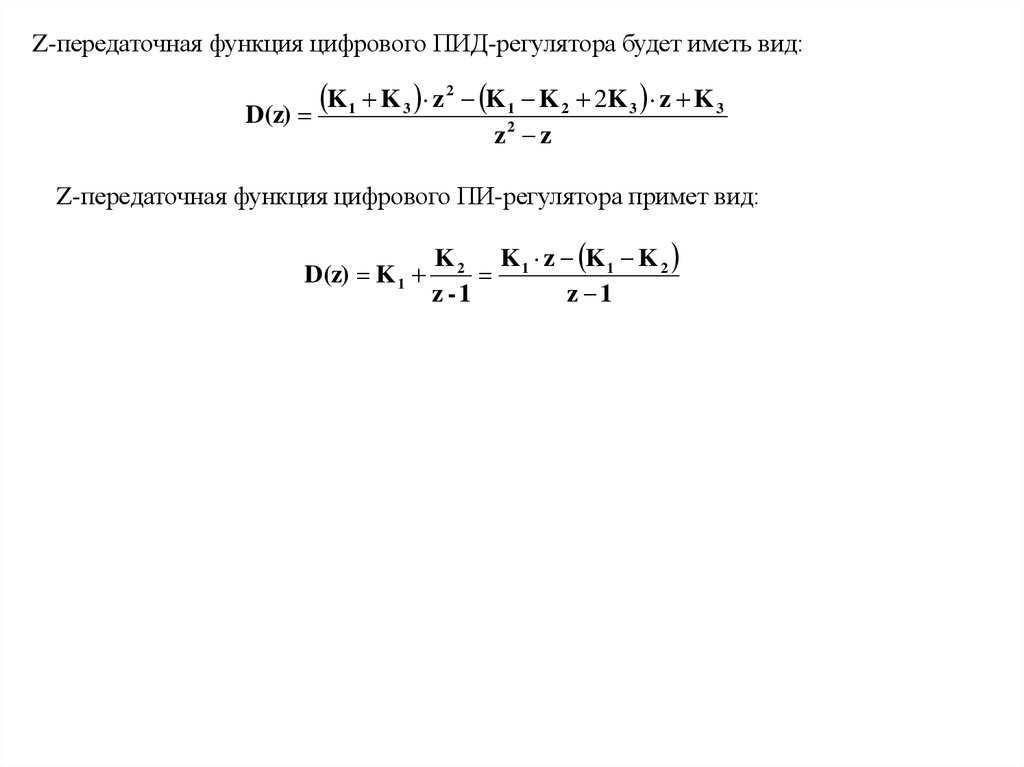
Z-передаточная функция цифрового ПИД-регулятора будет иметь вид:K 1 K 3 z 2 K 1 K 2 2K 3 z K 3
D(z)
z2 z
Z-передаточная функция цифрового ПИ-регулятора примет вид:
D(z) K 1
K 2 K 1 z K 1 K 2
z -1
z 1