















")







")













Wнч (s)→Wпнч (z) = z{Wфэ(s)Wнч(s)} → →W(jλ) ЧХ разомкнутой импульсной АСУ для области низких частот: и для области")















 в ряд Лорана")








 electronics
electronicsSimilar presentations:

. Основные понятия")
")


")




Дискретные системы
1. Дискретные системы
Дискретные АСУ - системы, в составкоторых, помимо типовых динамических
звеньев, входят одно или несколько звеньев,
производящих квантование непрерывного
сигнала в дискретный.
Дискретные АСУ делятся на:
импульсные,
релейные
цифровые.
Квантование сигнала осуществляется в
импульсных АСУ - по времени,
в
релейных -по уровню,
в цифровых -по времени и по уровню.
2. Структура и классификация импульсных систем
Квантованные по времени величины припомощи импульсной модуляции преобразуются в последовательность импульсов, которые
воздействуют на непрерывную часть системы.
Процесс квантования и импульсной модуляции осуществляется импульсным элементом.
Импульсная АСУ состоит из импульсного
элемента (ИЭ) и непрерывной части (НЧ),
составленной из типовых динамических
звеньев.
3.
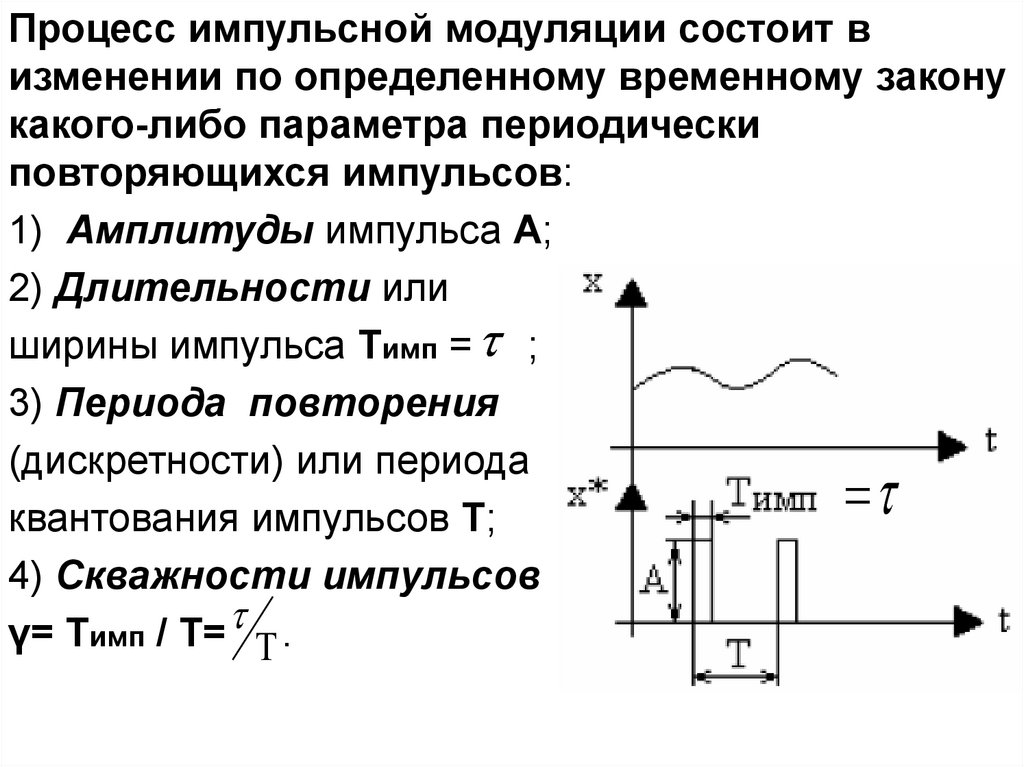
Процесс импульсной модуляции состоит визменении по определенному временному закону
какого-либо параметра периодически
повторяющихся импульсов:
1) Амплитуды импульса А;
2) Длительности или
ширины импульса Тимп = ;
3) Периода повторения
(дискретности) или периода
квантования импульсов Т;
4) Скважности импульсов
γ= Тимп / Т= .
4. Виды импульсной модуляции
1) амплитудно-импульсная модуляция - АИМ (амплитудаимпульса пропорциональна входному сигналу: A = f(x) при
T = const, Тимп = const);
2) широтно-импульсная модуляция - ШИМ (длительность
импульса пропорциональна входному сигналу: Тимп = f(x)
при A = const, T = const);
3) временная импульсная модуляция - ВИМ, включающая в
себя:
• фазо-импульсную модуляцию - ФИМ (фаза, т.е.
временной сдвиг импульса относительно начала периода
дискретности T, пропорциональна входному сигналу:
ϕ = f(x) при A = const, T = const, Тимп = const);
• частотно-импульсную модуляцию -ЧИМ (частота
дискретности пропорциональна входному сигналу:
ω0 = f(x) при A = const, Тимп = const).
Величина, определяющая закон модуляции, называется
модулирующей величиной.
5. Квантование по времени
x(t)АИМ
= nT
0
1T 2T 3T
nT
n - номер такта (периода) квантования
Если в системе есть только квантование по
времени, то она линейная.
6. Квантование по уровню
X(t)5
4
3
2
1
0
0 1T 2T 3T 4T 5T 6T 7T 8T 9T 10T 11T
t =nT
АСУ с квантованием по уровню - нелинейные
7. Квантование смешанное: по времени и уровню
Такое квантование используется вцифровых системах ЭВМ
X(t)
4∆x
3∆x
2∆x
∆x
0 1T
2T
3T 4T 5T 6T 7T
8T 9T 10T 11T 12T 13T
nT
8. Пример квантования сигнала
X(t)5
4
3
2
1
0
0
1T
2T
Квантование по уровню
по времени
смешанное
3T
4T
5T
6T
7T
nT
9. Достоинства импульсных АСУ
• Возможность управления большимимощностями с высокой точностью;
• Возможность разделения во времени
информационных сигналов при
многоканальной передаче (ТП);
• Обеспечение согласованной работы
непрерывных устройств с ЦВМ;
• Повышенная помехозащищенность.
10. Математическое описание дискретных систем
Дискретные АСУ удобно описывать функциейдискретной переменной, когда все величины
рассматриваются в дискретные равноотстоящие
моменты времени - решетчатой функцией (РФ) и
разностным уравнением.
Решетчатая функция времени x[nT], или в сокращенной записи x[n] - это математическая функция,
значения которой определены в дискретные равноотстоящие друг от друга моменты времени t = nT,
где n -целое положительное число 0, 1, 2 ...;
Т - период дискретности (квантования).
11.
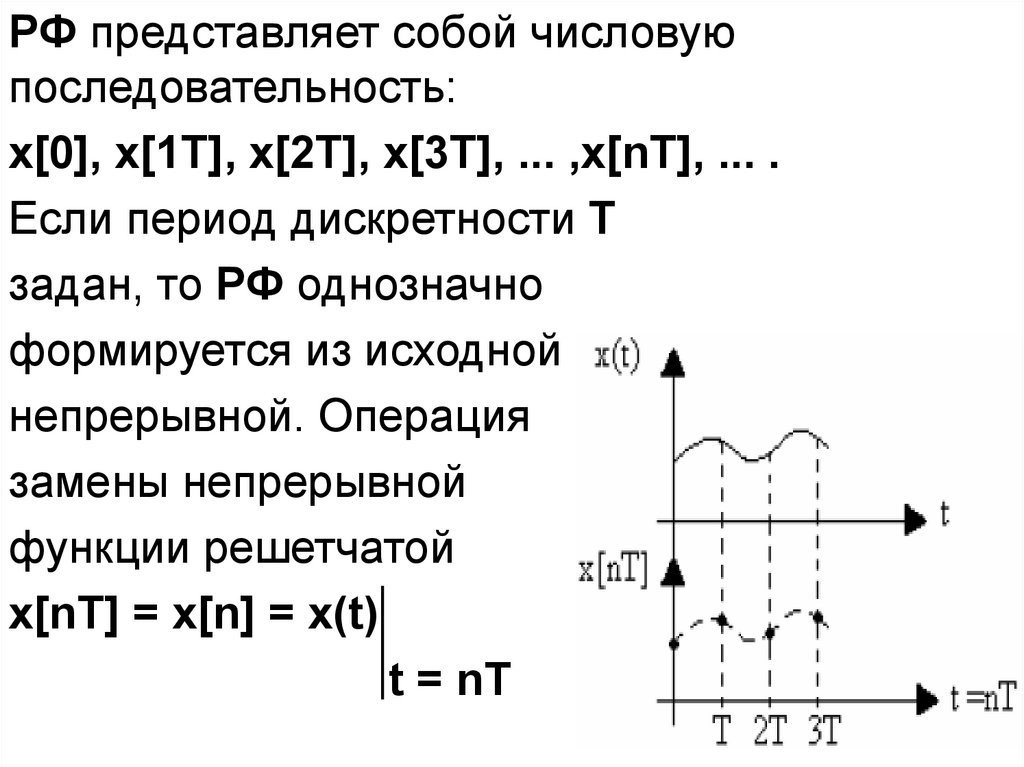
РФ представляет собой числовуюпоследовательность:
x[0], x[1T], x[2T], x[3T], ... ,x[nT], ... .
Если период дискретности T
задан, то РФ однозначно
формируется из исходной
непрерывной. Операция
замены непрерывной
функции решетчатой
x[nT] = x[n] = x(t)
t = nT
12. Конечные разности решетчатых функций
Дискретными аналогами производных иинтегралов непрерывных функций для РФ
являются конечные разности (КР):
•прямые (упреждающие)
•обратные (отстающие).
∇x[2]
Первая прямая разность:
Δ x[n] = x[n+1]−x[n]
Δx[2]
Первая обратная разность:
∇x[n] = x[n]−x[n-1].
13.
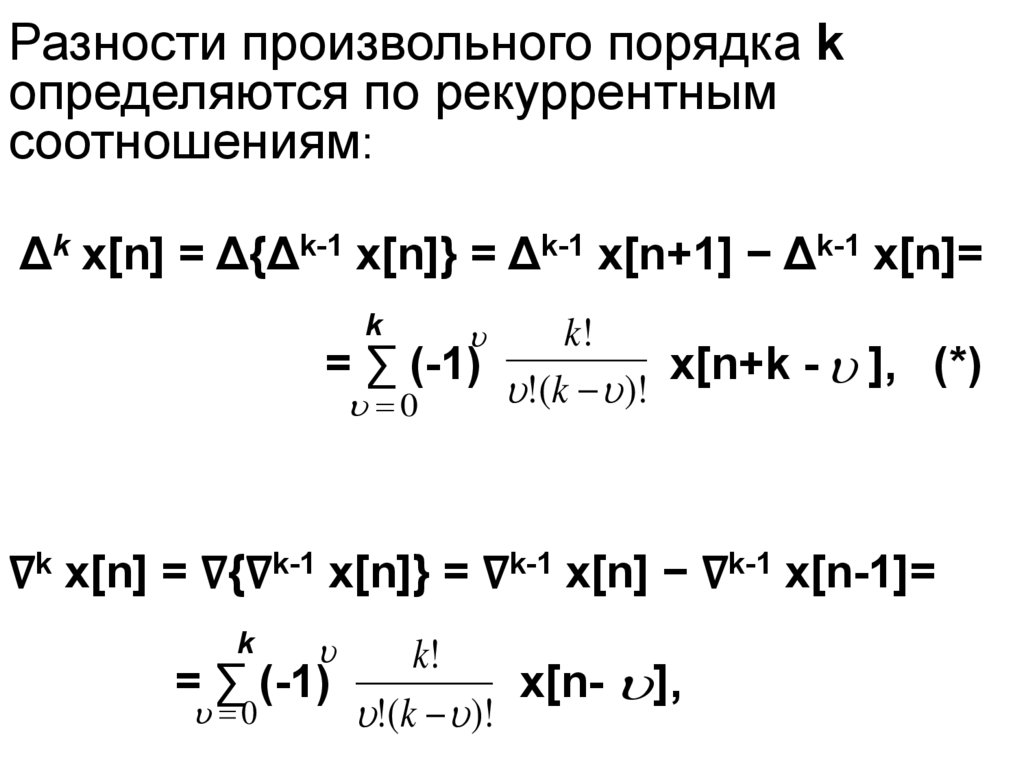
Разности произвольного порядка kопределяются по рекуррентным
соотношениям:
Δk x[n] = Δ{Δk-1 x[n]} = Δk-1 x[n+1] − Δk-1 x[n]=
k
k!
= ∑ (-1)
x[n+k - ], (*)
!(k )!
0
∇k x[n] = ∇{∇k-1 x[n]} = ∇k-1 x[n] − ∇k-1 x[n-1]=
k
k!
= ∑ (-1)
x[n- ],
0
!(k )!
14.
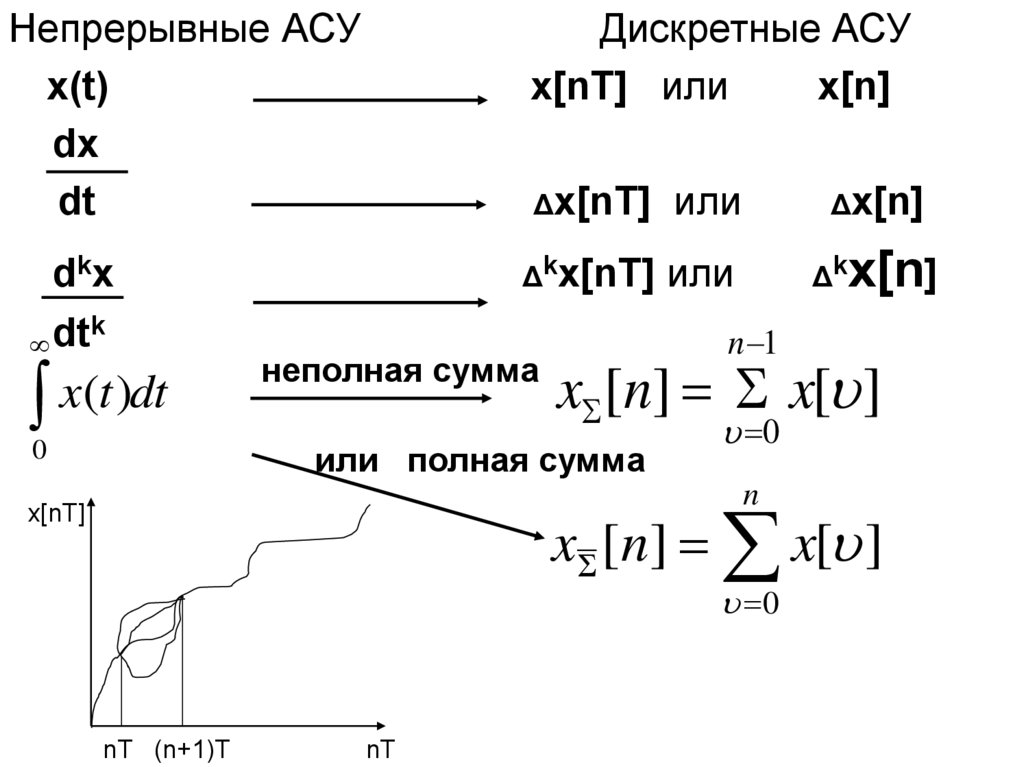
Непрерывные АСУx(t)
dx
dt
Дискретные АСУ
x[nT] или
x[n]
dkx
k
dt
x(t )dt
0
Δx[nT]
или
Δkx[nT]
или
неполная сумма
Δx[n]
Δk
x[n]
n 1
x [n] x[ ]
или полная сумма
0
n
x [n] x[ ]
x[nT]
0
nT (n+1)T
nT
15. Разностные уравнения
Разностные уравнения (РУ) - (уравнения вконечных разностях) связывают между собой
решетчатые функции и их конечные разности.
РУ - аналоги дифференциальных
уравнений, описывающих непрерывные АСУ.
При использовании прямых разностей
неоднородные линейные РУ m-го порядка
имеют вид:
m 1
a0 y[n] a1 y[n] ... am 1 y[n] am y[n]
m
b0 k x[n] b1 k 1 x[n] ... bk 1 x[n] bk x[n];
k m;
x входное воздействи е; у выходная величина.
16.
РУ при использовании (*) можно записать череззначения решетчатой функции:
a y[n m] a y[n m 1] ... a y[n 1] a y[n]
*
0
*
1
*
m 1
*
m
b x[n k ] b x[n k 1] ... b x[n 1] b x[n].
*
0
*
1
*
k 1
*
k
При х[n] = 0 это уравнение становится однородным
РУ, решением которого будет y[n].
Общее решение однородного РУ при некратных
корнях характеристического уравнения может быть
m
записано:
y[n] C z
i 1
n
i i
где Ci -постоянные коэффициенты;
zi -корни характеристического уравнения:
a0 z a1 z
m
m 1
... am 1 z am 0
17.
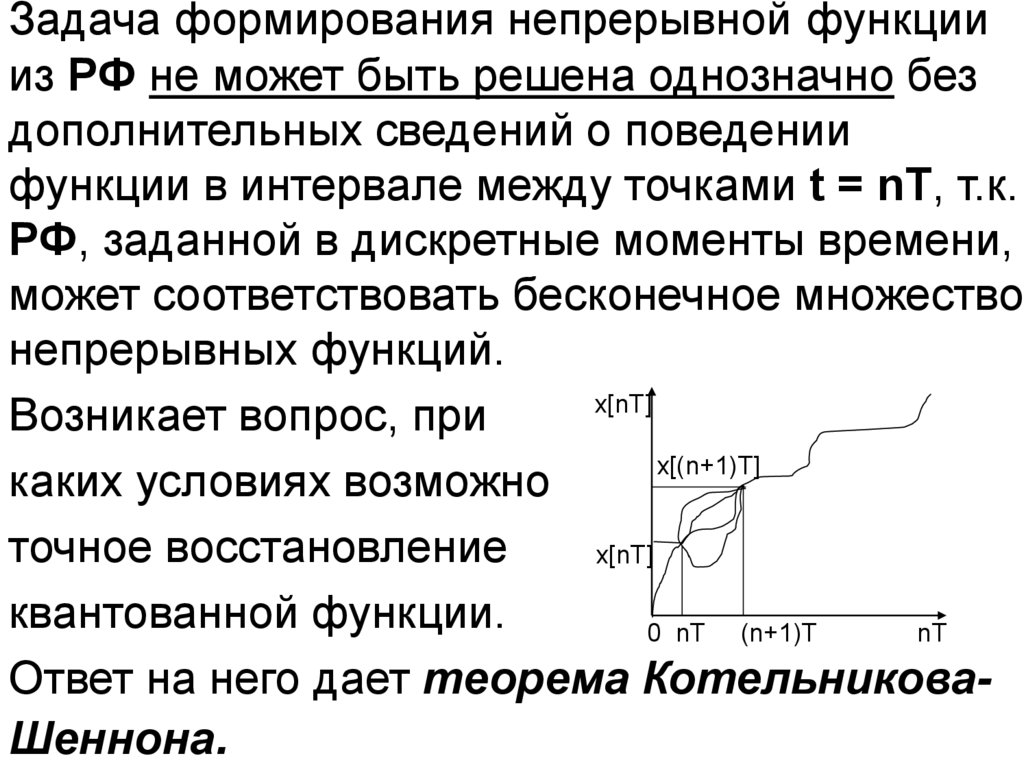
Задача формирования непрерывной функциииз РФ не может быть решена однозначно без
дополнительных сведений о поведении
функции в интервале между точками t = nT, т.к.
РФ, заданной в дискретные моменты времени,
может соответствовать бесконечное множество
непрерывных функций.
x[nT]
Возникает вопрос, при
x[(n+1)T]
каких условиях возможно
точное восстановление
x[nT]
квантованной функции.
0 nT (n+1)T
nT
Ответ на него дает теорема КотельниковаШеннона.
18. Теорема Котельникова-Шеннона:
Теорема КотельниковаШеннона:непрерывный сигнал x(t), частотный спектр
которого ограничен полосой 0 < fs< fс,
полностью определяется последовательностью своих дискретных значений, если
период квантования Т удовлетворяет условию:
Т < 1 /2fс
или Т < π /ωс ,
где fс[Гц], ωс [с-1] - частота спектра.
Частота квантования:
ω 2ωс
При
выполнении этого условия потери информации
не происходит и из квантованного сигнала
можно без потерь восстановить исходный
непрерывный сигнал.
19.
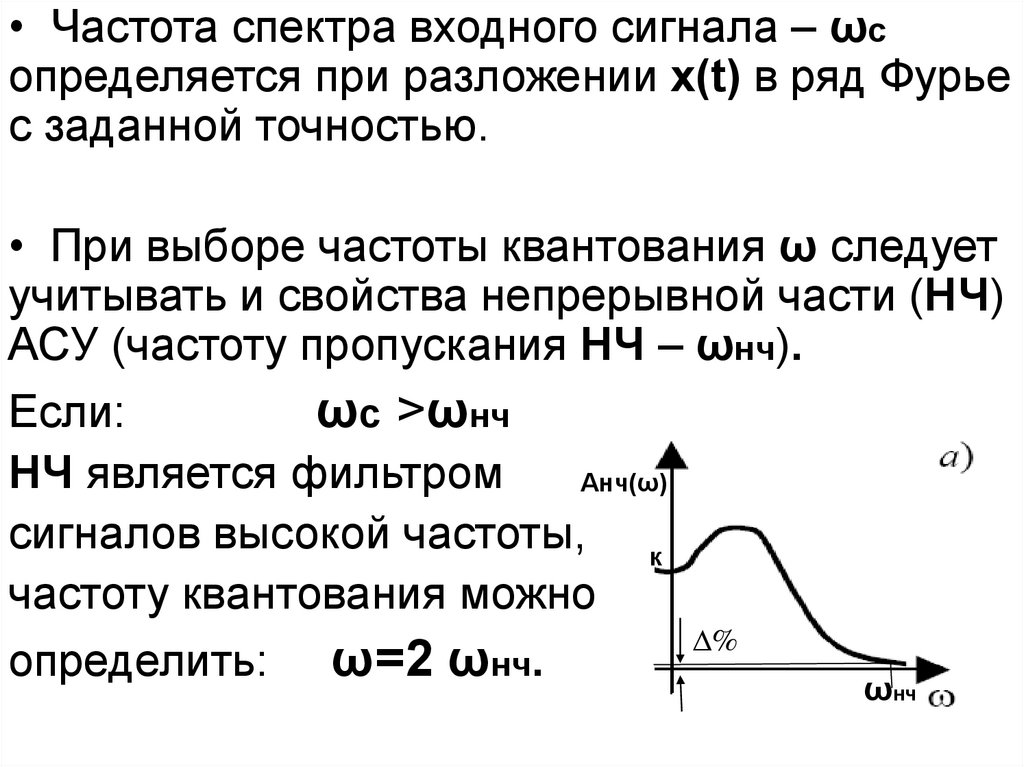
• Частота спектра входного сигнала – ωсопределяется при разложении x(t) в ряд Фурье
с заданной точностью.
• При выборе частоты квантования ω следует
учитывать и свойства непрерывной части (НЧ)
АСУ (частоту пропускания НЧ – ωнч).
Если:
ωс >ωнч
НЧ является фильтром
Анч(ω)
сигналов высокой частоты, к
частоту квантования можно
%
определить: ω=2 ωнч.
ωнч
20. Методы исследования дискретных АСУ
Для получения возможностиисследования решений РУ в общем виде
широко используются:
• дискретное преобразование Лапласа,
• z-преобразование,
• w-преобразование,
• частотные методы.
21. Z -преобразование
Z-преобразованием РФ - x[nT] называетсяфункция комплексного аргумента z - X(z) ,
определяемая выражением:
при z > R=1/ρ , где ρ -радиус сходимости ряда.
Функция x[nT] - оригинал,
а функция X(z) - изображение или
z-преобразование функции x[nT].
Z-преобразование дает возможность получить из X(z)
значение ординат РФ - x[nT] в моменты
квантования.
22. Z - преобразования функций времени
Для нахождения zизображений РФ пооригиналу и наоборот
имеются специальные
таблицы.
Преобразование, в
котором
z e
sT
введено Я.З.Цыпкиным
под названием
“дискретное
преобразование
Лапласа”.
23. Вычисление Z-преобразований
Способ 1:X(t)
(по определению)
Пример:z- изображение
X[n]
A
ступенчатой функции
x(t)=A*1(t)
t
t
x[n] A *1[n] A;
X ( z ) x[n] * z
n 0
n
A *1[n] * z
n 0
n
A z
n
n 0
A( z 0 z 1 z 2 ...) A(1 z 1 z 2 ...)
1
A
A* z
при 1
.
1
z
1 z
z 1
24. Способ 2 : (с помощью вычетов)
Если известно преобразование Лапласа X(s)исходной непрерывной функции x(t), то можно
вычислить Z -преобразование X(z):
x(t) квантование x[nT]
m
z
Z –преобра- зование
X ( z)
Re s( X ( sk ))
sk
X(s) переход к Z -преобразованию X(z)
i 1
z eT
sk – полюса (простые) преобразования
Лапласа X(s) непрерывной функции x(t).
В случае кратных корней формула
усложняется (можно найти в справочниках).
Пример: x(t) = 1(t); X(s) = 1/s. Вычисляем с
z
помощью таблиц справочника:
X ( z)
z 1
*1
25. Свойства z-преобразования
1. Свойство линейности: изображениюлинейной комбинации РФ соответствует
такая же линейная комбинация
z-изображений:
a1x1[n] a2 x2[n] a1 X1 ( z) a2 X 2 ( z)
2. Свойство смещения аргумента в
области оригинала: сдвиг аргумента [nT]
в РФ на целое число периодов kT
соответствует умножению изображения X(z)
k
на z k :
x[( n k )T ] z X ( z )
26.
3. Свойство смещения независимойпеременной в области изображения :
сдвигу аргумента в z- изображении на целое
число периодов в комплексной области
aT
соответствует умножение z на e
e
aT
x[nT ] X (e
aT
z)
4. Правило дифференцирования
изображения: умножение РФ x[nT ]на nT
соответствует дифференцированию ее
z- изображения X(z), результат которого
dX
(
z
)
умножается на (-Tz): nT x[nT ] Tz
dz
27.
5. Связь начальных и конечных значений:начальное значение оригинала РФ равно
конечному значению z- изображения :
lim ( x nT ) lim X z
n 0
z
Конечное значение РФ:
z 1
( x nT ) lim
X z
lim
n
z 1 z
6. Изображение разностей:
z x nT z 1 X z
k
k
28. Тренировочное задание
Прямая конечная разность 2-го порядка:x[n] x n 1 x[n] x[n 2] x[n 1]
2
x[n 1] x[n] x[n 2] 2 x[n 1] x[n].
x[n] ( z 1) X ( z ) ( z 2 z 1) X ( z )
2
2
x[n 2] 2 x[n 1] x[n].
2
29. Передаточная функция импульсной АСУ в z- изображении
Разностное уравнение (РУ) АСУ:a0 y[n m] a1 y[n m 1] ... am 1 y[n 1] am y[n]
b0 x[n k ] b1 x[n k 1] ... bk 1 x[n 1] bk x[n].
Выполнив z – преобразование РУ, получим
передаточную функцию АСУ в z-изображении:
k 1
Y ( z ) b0 z b1 z ... bk
W ( z)
m
.
m 1
X ( z ) a0 z a1 z ... am
k
30. Представление импульсного элемента
ИЭ часто представляют последовательнымсоединением простейшего импульсного элемента
(ПИЭ) и формирующего элемента (ФЭ).
ПИЭ преобразует непрерывный сигнал в мгновенные
импульсы в виде δ-функций, а ФЭ формирует из них
импульс заданной формы выходного импульса
реального импульсного элемента (РИЭ).
31. Передаточная функция ФЭ
На выходе ПИЭ ширина импульса : → 0;<< T;
A* 1 . Действие ПИЭ сводится к умножению
отсчётов квантуемой функции x(t) на дельтафункцию δ(t-nТ). Форма импульса РИЭ определяет
весовую функцию ФЭ - kФЭ(t). Поэтому,
передаточную функцию ФЭ определим как
изображение формы импульса по Лапласу, т.е.
WФЭ(s)=L {kФЭ(t)}.
ФЭ объединяется с непрерывной частью (НЧ) АСУ в
приведенную непрерывную часть (ПНЧ),
передаточная функция которой
WПНЧ(s) = WФЭ(s)*WНЧ(s).
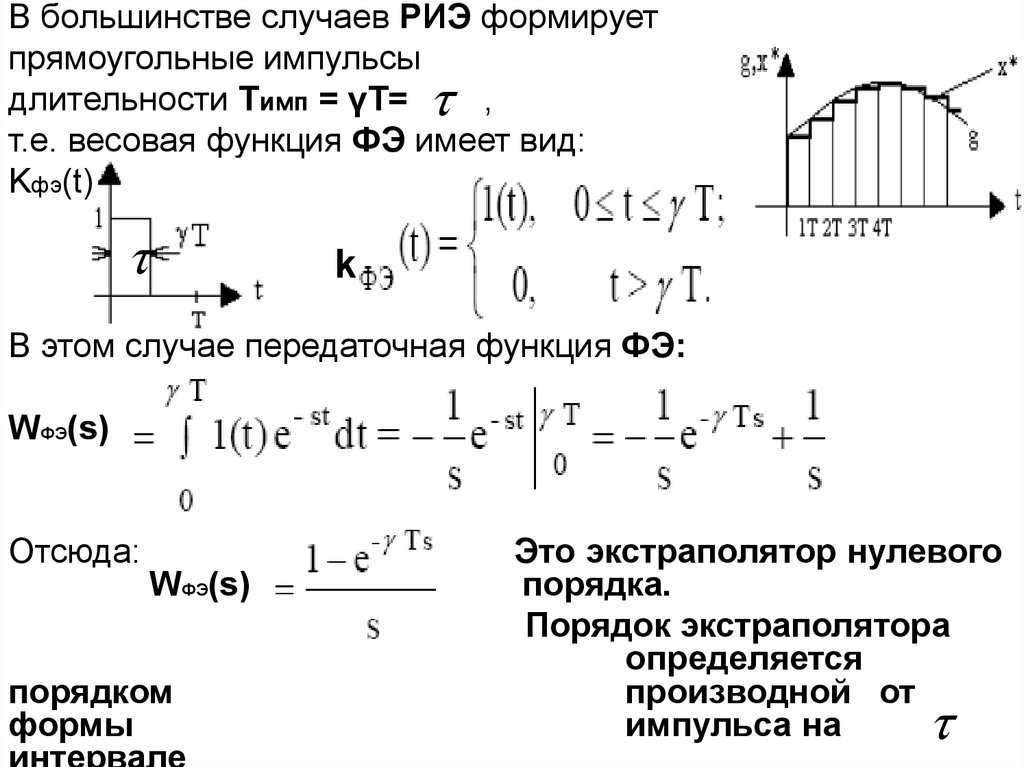
32.
В большинстве случаев РИЭ формируетпрямоугольные импульсы
длительности Tимп = γТ=
,
т.е. весовая функция ФЭ имеет вид:
Kфэ(t)
k
В этом случае передаточная функция ФЭ:
WФЭ(s)
Отсюда:
WФЭ(s)
порядком
формы
интервале
Это экстраполятор нулевого
порядка.
Порядок экстраполятора
определяется
производной от
импульса на
33. Передаточные функции типовых импульсов
• Треугольный импульсx(t)
s
2 2
(1 e )
Wфэ (s) 2 A
s2
• Синусоидальный импульс
t
T
T x(t)
(1 e s )
W фэ( s ) AT
[ s 2T 2 ( ) 2 ]
• Экспоненциальный импульс
Wфэ ( s)
T
x(t)
AT
sT
3
T
t
t
34. Определение передаточной функции Wпнч(s)
Рассмотрим при наличии формирователя прямоугольныхимпульсов:
(s)
s W
нч
Wпнч(s)= WФЭ(s)*WНЧ(s)
WНЧ(s)= (1 e )
.
s
Переходя от непрерывного преобразования Лапласа
к z-преобразованию:
Wпнч(z)=
Wнч( s )
s
Wнч ( s )
(1 z ) Z
.
s
1
Выражение
необходимо представить как сумму элементарных дробей
(например, по теореме разложения, используя метод
неопределенных коэффициентов ), а затем выполнить zпреобразование каждой из дробей (справочник).
35. Теорема разложения
R( s )W ( s)
Q( s )
i 1
r
C j Djs
Ai
Bk
2 2
i
s
k 1 Tk s 1
j 1 T j s 2 T j s 1
q
Ai , Bk , C j , D j
- коэффициенты разложения,
определяются:
• методом неопределенных коэффициентов;
• методом предельных значений;
• методом подстановки численных значений.
36. Тренировочное задание
Пример. Определить дискретнуюпередаточную функцию импульсной АСУ, у
которой ИЭ формирует прямоугольные
импульсы длительности = 1с периодом
дискретности T=1 c, а непрерывная часть
задана передаточной функцией:
37. Р е ш е н и е
РешениеДискретную передаточную функцию разомкнутой
импульсной системы находим, представляя дробь
W
нч( s ) в виде суммы элементарных дробей:
s
W
нч ( s )
=
s
k
A1 A2
B1
2
2
s (T1s 1) s s
T1s 1
( A1T1 B1 ) s ( A1 A2T1 ) s A2
s 2 (T1s 1)
0
s A2 k ,
2
s1 A1 A2T1 0,
s A1T1 B1 0.
2
A1 kT1 ,
B1 kT .
2
1
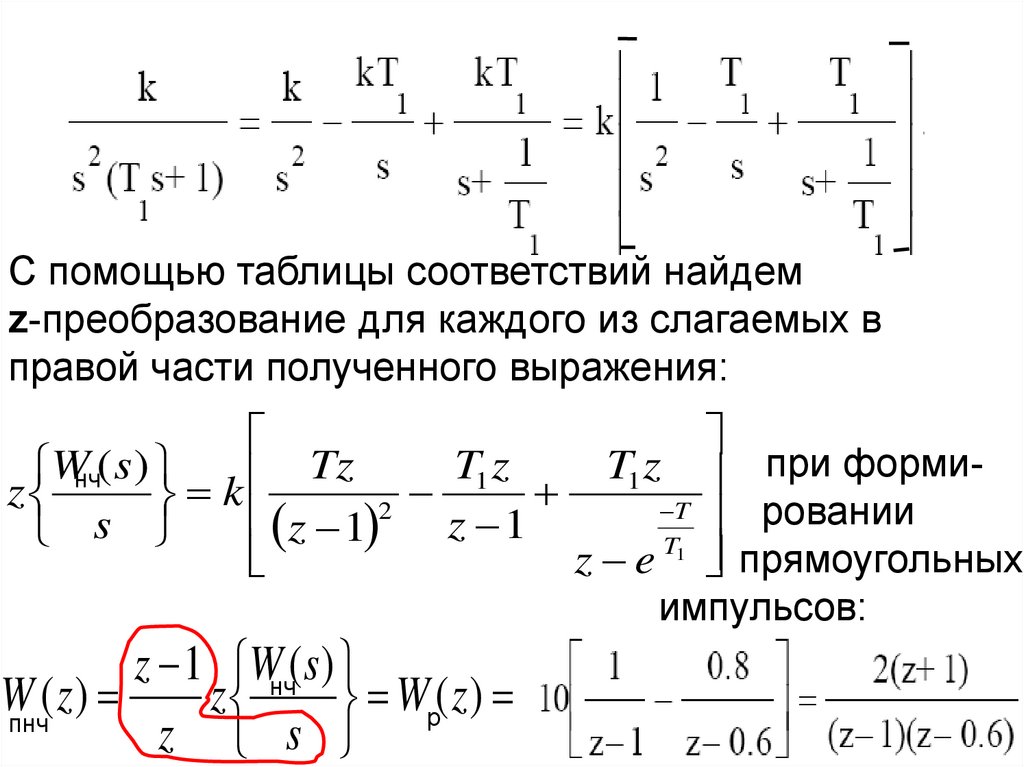
38.
С помощью таблицы соответствий найдемz-преобразование для каждого из слагаемых в
правой части полученного выражения:
Tz
T1 z
T1 z
Wнч( s )
z
k
2
T
s
z
1
z 1
z e T1
при форми ровании
прямоугольных
импульсов:
z 1 Wнч( s)
W
(
z
)
z
W
(
z
)
р
пнч
z s
39. Структурные схемы и передаточные функции замкнутых дискретных АСУ
ПНЧИзображение РФ - y[n]
Y(z) = W(z) X(z)
W(z) = Z{WФЭ(s)W1(s)W2(s)}.
Уравнение z-изображения
рассогласования:
Тогда z-изображение выходной координаты:
Y(z) = {W(z) /[1+ W(z) ]} G(z)
40. Передаточная функция замкнутой АСУ
y( z)Wпр ( z )
W фэ ( z )Wнч.пр( z )
W ( z)
x( z ) 1 W р ( z ) 1 W фэ ( z )Wнч.р( z )
z 1 Wпнч.пр( s )
Z
z
s
z 1 Wпнч.р ( s )
1
Z
z
s
41. Частотные характеристики импульсных систем
Выражения для ЧХ импульсных системполучаются из W(z) путем замены оператора
z на e j .
Т.к. частота ω входит в показатель степени,
то ЧХ являются периодическими
функциями частоты, период изменения
которых равен ±π/ ω или (2π/ ω).
e
j T
cos T j sin T
Следовательно, нельзя различить
составляющие, частоты которых кратны
частоте квантования импульсного элемента
ωо = 2π/Т.
42. ЧХ импульсных систем описываются трансцендентными выражениями:
jA(ω) = mod W( e ) - АЧХ;
j
ψ(ω) = arg W( e
) - ФЧХ;
j
U(ω) = Re W( e ) - ВЧХ;
V(ω) = Im W( e j ) - МЧХ;
j
W( e
) = W(z) - АФЧХ.
z = e j
ЧХ импульсной АСУ строятся по точкам в
интервале частот 0 ≤ ω ≤ π⁄ Т.
43. Свойства ЧХ импульсных АСУ
1. В соответствии с периодичностью АФЧХj
W( e ) полностью определяется своими
значениями в интервале −π⁄ Т ≤ ω ≤ π⁄ Т.
2. Т.к. ВЧХ является четной функцией, а МЧХ нечетной, то достаточно рассматривать интервал
частот 0 ≤ω ≤ π⁄ Т.
3. В крайних точках интервала 0 ≤ ω ≤ π⁄ Т АФЧХ
принимает вещественные значения.
4. При уменьшении периода дискретности T, т.е. при
увеличении частоты квантования ω0 = 2π/Т,
ЧХ импульсных АСУ приближаются к ЧХ
непрерывных систем, а частотный интервал
0 ≤ ω ≤ π⁄ Т растягивается на всю ось ω при T → 0.
44. Периодичность ЧХ
При гармоническом входном сигнале Аsinωt наРИЭ выходной сигнал АСУ не изменится при
изменении частоты входного сигнала ω на любую
величину, кратную частоте квантования ω0=2π/Т,
т.е. выходной сигнал будет одним и тем же при
частотах, равных ω +к ω0. При снятии ЧХ путем
неограниченного увеличения частоты входного
сигнала ω→∞, получается периодическая
характеристика:
А(ω)
ω0≥2 ωнч
ω0≤2 ωнч
А(ω)
ω0→∞
ω
ωнч
ω0
ω
45. W- преобразование
Определение ЧХ связано со сложными расчетами,поэтому на практике применяются ЧХ относительно
абсолютной псевдочастоты λ. Переход к
псевдочастоте основан на переходе от
z-преобразования к
1 w
w-преобразованию
z
1 w
с помощью подстановки:
c последующей заменой комплексной переменной w
на абсолютную псевдочастоту:
j T
Такая замена и есть
w
w –преобразование.
2
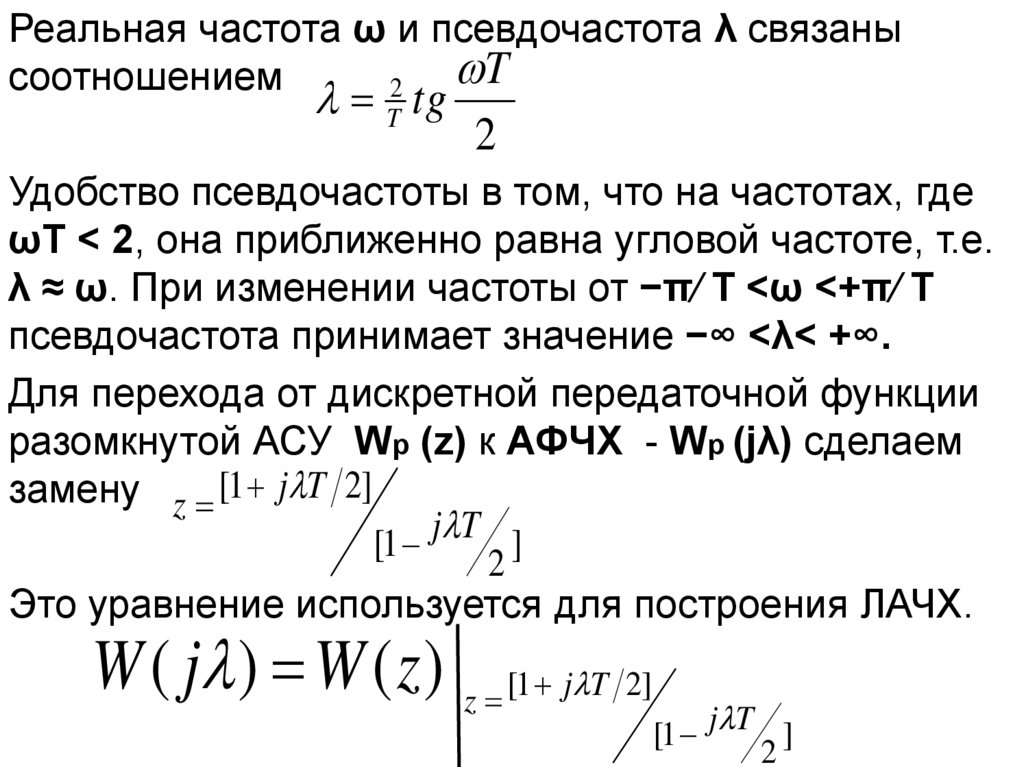
46.
Реальная частота ω и псевдочастота λ связаныT
соотношением
2
T tg
2
Удобство псевдочастоты в том, что на частотах, где
ωT < 2, она приближенно равна угловой частоте, т.е.
λ ≈ ω. При изменении частоты от −π⁄ Т <ω <+π⁄ Т
псевдочастота принимает значение −∞ <λ< +∞.
Для перехода от дискретной передаточной функции
разомкнутой АСУ Wр (z) к АФЧХ - Wр (jλ) сделаем
замену z [1 j T 2]
[1 j T ]
2
Это уравнение используется для построения ЛАЧХ.
W ( j ) W ( z ) z [1 j T 2]
[1 j T ]
2
47. Построение ЛЧХ импульсных АСУ
ЛАЧХ строятся отдельно для областей низких(НЧ) и высоких частот (ВЧ). Границей,
разделяющей частотные области, служит
частота среза ωср в предположении, что
ωср* T< 2 ,
где Т - период дискретности.
Это условие необходимо выполнять для
обеспечения запаса устойчивости и точности
работы системы, и оно согласуется с теоремой
Котельникова-Шеннона.
48. Построим ЛАЧХ АИС, с экстраполятором нулевого порядка и непрерывной частью с передаточной функцией:
mWнч ( s )
k (T j s 1)
s
j 1
n
(T s 1)
i
i 1
49. Принятые допущения:
1. Величина, обратная периоду дискретностиT, больше половины частоты среза ωср, т.е.
ωср < 2/T.
2. На частоте среза ЛАЧХ непрерывной части
имеет наклон −20 дБ/дек.
3. Постоянным времени Тj (j = 1, 2, ..., m)
соответствуют частоты сопряжения
меньшие, чем частота среза ωсj < ωср.
4. Имеется l(l< n) постоянных времени Ti (i = 1,
2,..., l), которым соответствуют сопрягающие
частоты меньшие, чем частота среза.
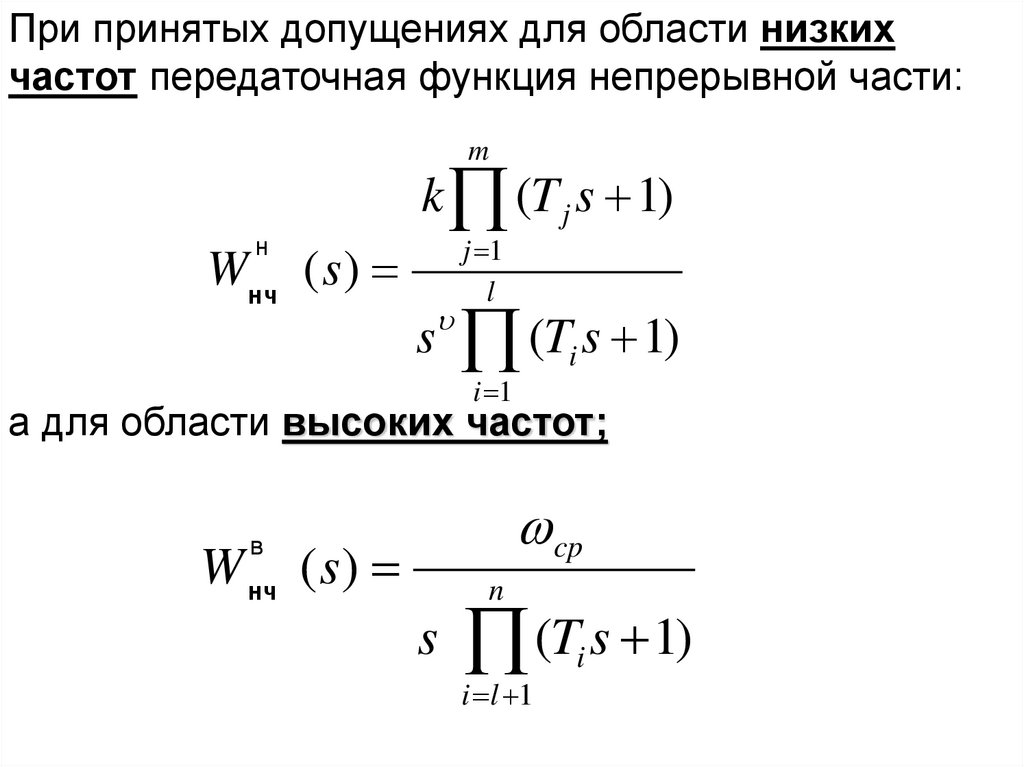
50.
При принятых допущениях для области низкихчастот передаточная функция непрерывной части:
m
н
Wнч ( s )
k (T j s 1)
s
j 1
l
(T s 1)
i
i 1
а для области высоких частот;
cp
W нч ( s)
в
n
s
(T s 1)
i
i l 1
51. Wфэ(s)Wнч (s)→Wпнч (z) = z{Wфэ(s)Wнч(s)} → →W(jλ) ЧХ разомкнутой импульсной АСУ для области низких частот: и для области
Wфэ(s)Wнч (s)→Wпнч (z) = z{Wфэ(s)Wнч(s)} →→W(jλ)
ЧХ разомкнутой импульсной АСУ для области
m
низких частот:
k
(1 j T )
j
T
j 1
W ( j ) (1
)
2 ( j ) r l (1 j Ti )
н
i 1
и для области высоких частот:
T T )
(
1
j
(
cp
j
T
в
2
W ( j ) (1
)
2
j
T
( j )(1
)
2
j
52. Выводы:
В НЧ области АФЧХ импульсной АСУ получимиз Wнч (s) подстановкой s = jλ и умножением
на множитель (1 − jλT/2). В этой области λ ≈ω.
Влиянием дополнительного множителя в НЧ
области можно пренебречь, т.к. ωср < 2/T.
В области низких частот ЧХ импульсной
АСУ совпадают с ЧХ ее непрерывной
части.
Начало ЛАЧХ в ВЧ области совпадает с
концом ЛАЧХ, построенной в НЧ области.
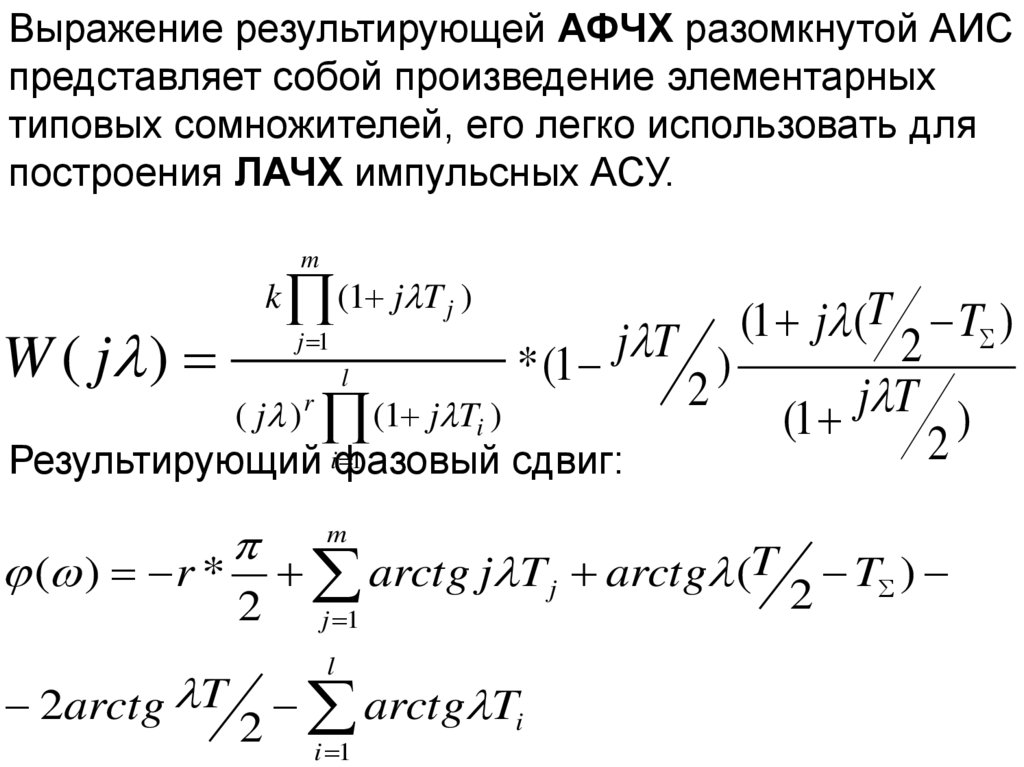
53.
Выражение результирующей АФЧХ разомкнутой АИСпредставляет собой произведение элементарных
типовых сомножителей, его легко использовать для
построения ЛАЧХ импульсных АСУ.
m
k
(1 j T j )
T T )
(
1
j
(
j 1
j
T
2
W ( j )
* (1
)
l
2
j
T
( j ) r (1 j Ti )
(1
)
2
1
Результирующий iфазовый
сдвиг:
( ) r *
2arctg T
2
m
arctg j T j arctg (T
j 1
l
2
arctg Ti
i 1
2
T )
54. Пример. Построить ЛАЧХ АИС с экстраполятором нулевого порядка и периодом дискретности ИЭ T = 4 с, передаточная функция
непрерывной части:55. Р е ш е н и е
РешениеВыбираем частоту среза ωcр < 2/T < 0.5 c-1. В
соответствии с заданными постоянными времени
определяем сопрягающие частоты:
ωc1=1/25=0.04 c-1 – НЧ диапазон;
ωc2=1/0.5=2 c-1 - ВЧ диапазон;
ωc3=1/0.3=3.33 c-1 – ВЧ диапазон.
Следовательно, получаем:
56. Асимптотические ЛАЧХ и ЛФХ, соответствующие полученным выражениям :
λс1=1/25=0.04;λс2=1/2=0.5;
λс3=1/1.2=0.8 .
Наклон
последней
асимптоты
0 дБ/дек
57. Устойчивость импульсных АСУ
Линейная импульсная АСУ устойчива, еслисвободная составляющая переходного процесса
yп[n] затухает с течением времени: lim yп[n] 0.
Она определяется решением однородного РУ
замкнутой импульсной АСУ
n
a0y[n] + a1y[n−1] + ... + amy[n−m] = 0,
где m - порядок системы.
При некратных корнях характеристического
m
уравнения:
n
yп [n] Ci z i
i 1
где zi - корни характеристического уравнения
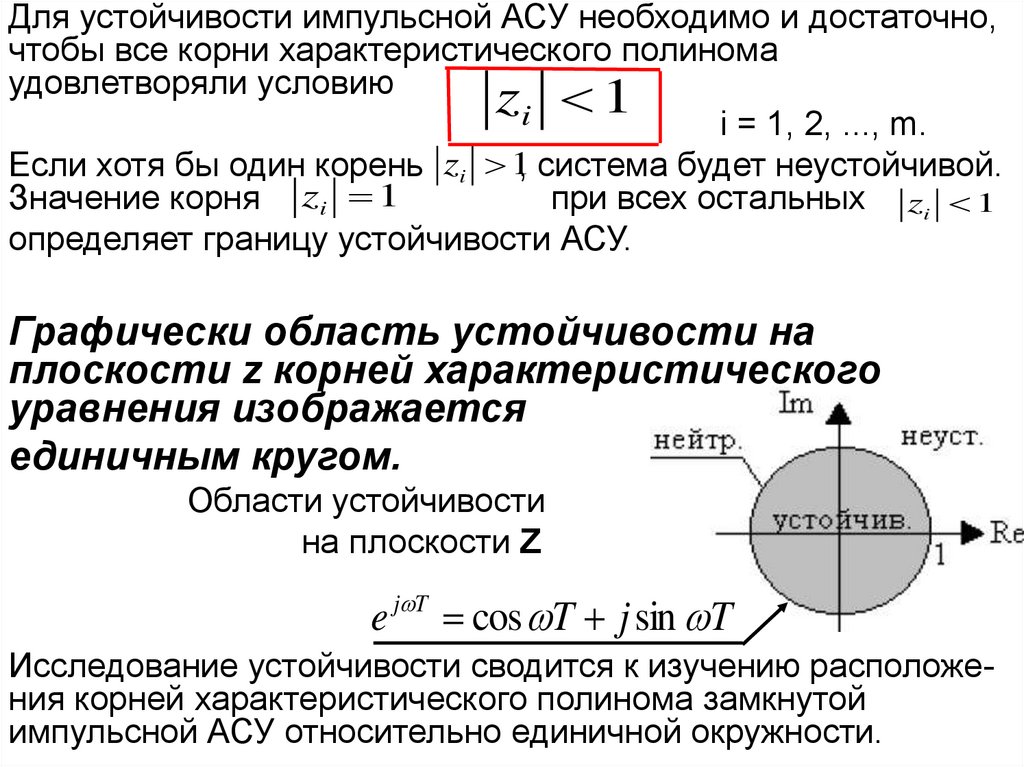
58.
Для устойчивости импульсной АСУ необходимо и достаточно,чтобы все корни характеристического полинома
удовлетворяли условию
zi 1
i = 1, 2, ..., m.
Если хотя бы один корень zi 1, система будет неустойчивой.
Значение корня zi 1
при всех остальных zi 1
определяет границу устойчивости АСУ.
Графически область устойчивости на
плоскости z корней характеристического
уравнения изображается
единичным кругом.
Области устойчивости
на плоскости Z
e j T cos T j sin T
Исследование устойчивости сводится к изучению расположения корней характеристического полинома замкнутой
импульсной АСУ относительно единичной окружности.
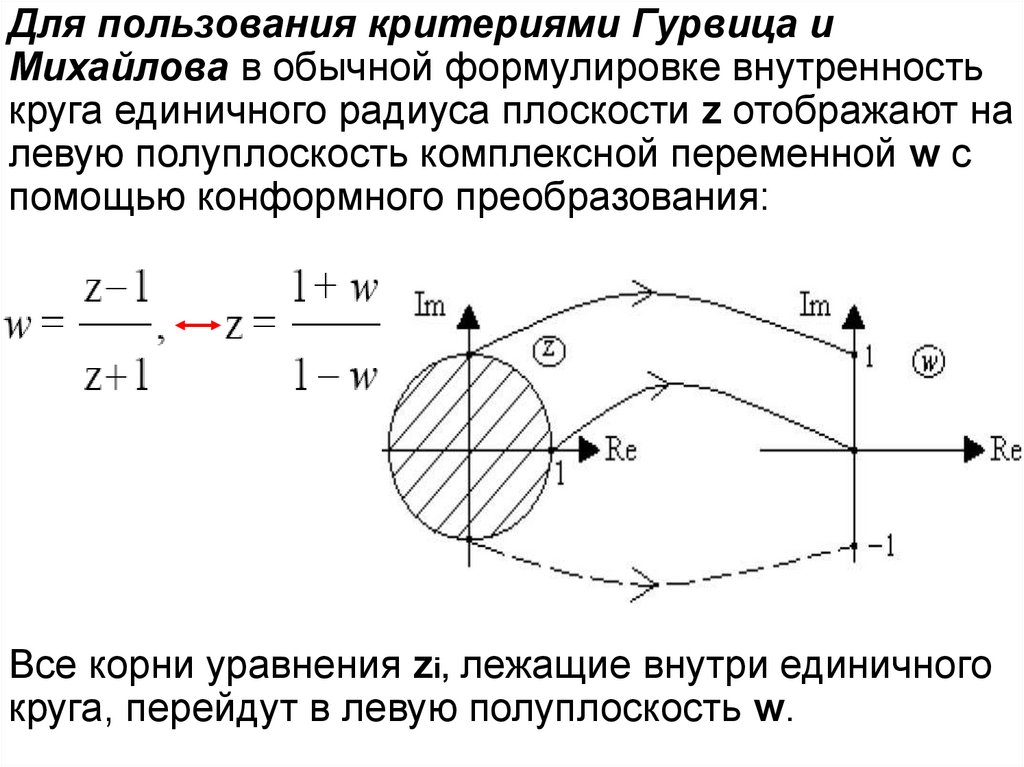
59.
Для пользования критериями Гурвица иМихайлова в обычной формулировке внутренность
круга единичного радиуса плоскости z отображают на
левую полуплоскость комплексной переменной w с
помощью конформного преобразования:
Все корни уравнения zi, лежащие внутри единичного
круга, перейдут в левую полуплоскость w.
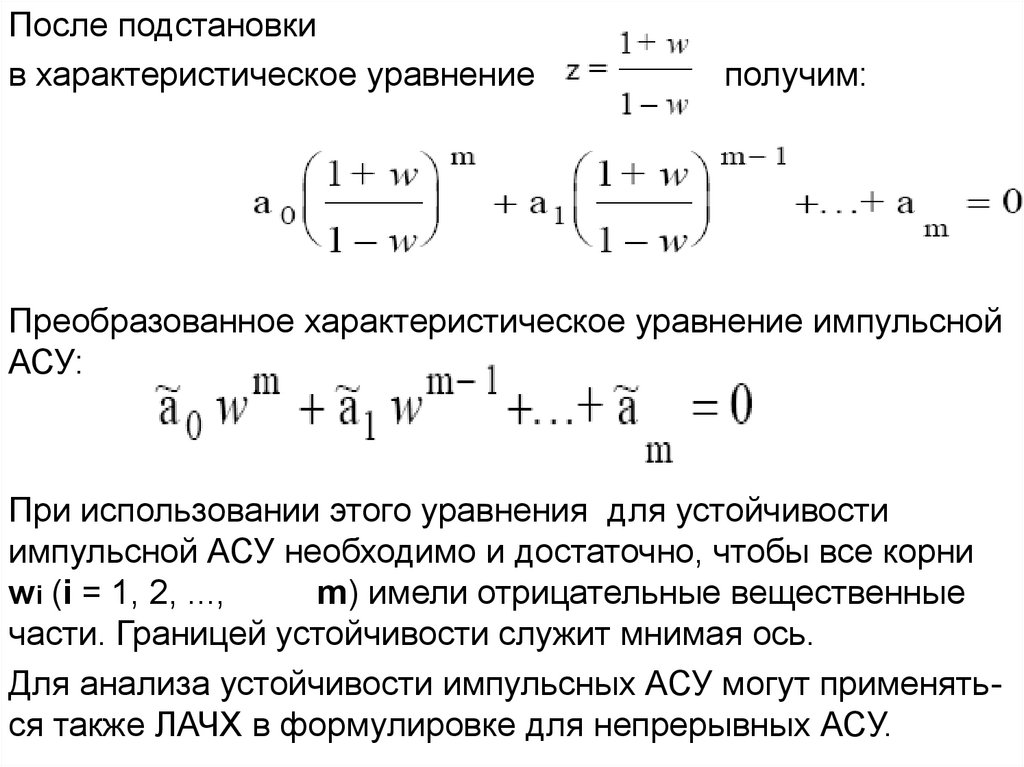
60.
После подстановкив характеристическое уравнение
получим:
Преобразованное характеристическое уравнение импульсной
АСУ:
При использовании этого уравнения для устойчивости
импульсной АСУ необходимо и достаточно, чтобы все корни
wi (i = 1, 2, ...,
m) имели отрицательные вещественные
части. Границей устойчивости служит мнимая ось.
Для анализа устойчивости импульсных АСУ могут применяться также ЛАЧХ в формулировке для непрерывных АСУ.
61. Критерии устойчивости
используются для исследования устойчивостиимпульсных АСУ без нахождения корней
характеристического уравнения.
Аналог критерия Рауса-Гурвица. Wз (z)→Wз (w)
Степень характеристического уравнения
Условия устойчивости
Используется
характеристический
полином,
полученный
после
W-преобразования Wз (w)
62. Аналог критерия Михайлова
Для устойчивости линейной импульсной АСУ m-гопорядка необходимо и достаточно, чтобы изменение
j T
аргумента функции D(e ) при изменении частоты ω
от 0 до π/T равнялось бы значению mπ , то есть
Δ arg D(e j T ) = mπ , 0 ≤ ω ≤ π/T.
j
Здесь D(e j T ) получается путем замены z на e
в
характеристическом полиноме замкнутой АСУ
j
m
m 1
D( z ) a0 z a1 z
... am 1 z am , z = e .
На рис. аналоги
кривых Михайлова для
устойчивой и неустойчивой
импульсной АСУ при m = 3.
63. Аналог критерия Найквиста
Если разомкнутая АСУ устойчива, то дляустойчивости замкнутой АСУ требуется, чтобы АФЧХ
j
разомкнутой АСУ- Wр ( e
) не охватывала точку с
координатами (−1, j0 ).
Для устойчивости замкнутой АСУ при
неустойчивой разомкнутой цепи требуется,
чтобы АФЧХ разомкнутой цепи охватывала точку (−1,
j0) на угол pπ, где p-число полюсов
разомкнутой цепи,
вне единичного
j
круга z = e
.
На рис. АФЧХ
устойчивых
импульсных АСУ.
64. Точность импульсных АСУ
Установившаяся ошибка импульсной АСУ определяется по предельному значению решетчатойфункции:
z 1
( ) lim [n] lim
E ( z ) g ( ) f ( )
z
n
z 1
z e
sT
в уст.
s 0 z 1
режиме
65. Установившиеся ошибки
( ){
установившаяся ошибка пропорциональна
величине задающего воздействия и периоду
дискретности.
66. Астатизм АСУ
Представим передаточную функцию импульснойразомкнутой АСУ
при r = 0 АСУ статическая,
при r = 1 - астатическая первого порядка и т.д., и
W(1)→ ∞.
( ) 0 от задающего воздействия, если
степень астатизма r ( ) 0, если k r ;
превышает степень
k
g
T
k
полинома k входного ( )
, если k r ;
W (1)
воздействия.
( ) , если k r.
67. Сигнал ошибки при непрерывном входном сигнале
C1 'C2 "
[nT ] C0 g[nT ]
g [nT ]
g [ nT ] ....
1!
2!
Ck ( k )
g
[
nT
]
g
(
t
)
t nT
g [ nT ],
k!
где С0 , С1 , С2 ,...Сk коэффициенты ошибок.
C0 E (1);
(k )
d E( z)
E (1)
k
dz
(k )
C1 T * E (1);
'
C2 T 2 [ E " (1) E ' (1)];
C3 T E (1) 3E (1) E (1) .
3
'"
"
'
z 1
68. Сигнал ошибки при дискретном входном сигнале
C1C2 2
[nT ] C 0 g[nT ] g[nT ] g[nT ] ....
1!
2!
Ck k
g[nT ],
k!
C
C
1
где C0 С0 ; C1
; C2 2 2 ;...
T
T
Ck
Ck
k.
T
69. Переходные процессы в импульсных АСУ
определяются с помощью :• обратного z-преобразования,
• ряда Лорана,
• решения разностного уравнения,
• частотных методов, основанных на
использовании ВЧХ или МЧХ замкнутой АСУ.
70. Обратное z-преобразование
Для расчета переходного процесса можно найтиобратное z-преобразование изображения выходной
1
величины АСУ y[n] Z Y ( z) ,используя формулу
обращения, согласно которой
k
y[ n] Re sY ( z ) z
n 1
z zi
i 1
где zi - полюсы выражения Y(z); i = 1, 2, ..., k.
Вычет в простом полюсе:
Re sY ( z ) z n 1 lim( z z )Y ( z) z n 1
i
z zi
Re sY ( z ) z
n 1
r 1
в полюсе кратности r:
1
d
r
n 1 ]
lim r 1 [( z zi ) Y ( z) z
(r 1)!
dt
z zi
71.
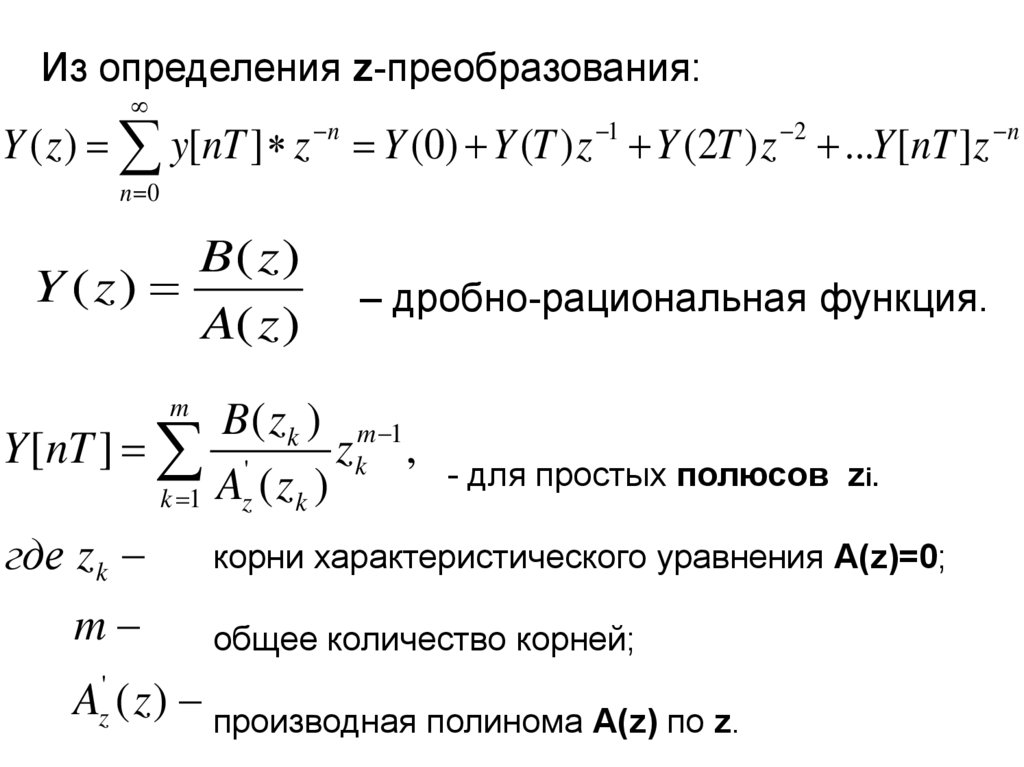
Из определения z-преобразования:Y ( z ) y[nT ] z Y (0) Y (T ) z Y (2T ) z ...Y [nT ]z
n
1
2
n 0
B( z )
Y ( z)
A( z )
– дробно-рациональная функция.
m
B( zk ) m 1
Y [nT ] '
zk ,
k 1 Az ( z k )
где zk
m
- для простых полюсов zi.
корни характеристического уравнения A(z)=0;
общее количество корней;
A ( z ) производная полинома A(z) по z.
'
z
n
72. Разложение изображения Y(z) в ряд Лорана
Дискретные значения переходного процесса можнонайти путем разложения Y(z) в ряд Лорана по
1
степеням z :
1
2
3
n
Y ( z ) Y0 Y1 z Y2 z Y3 z ... Yn z .
Коэффициенты Yi определяют выходную величину
АСУ в дискретные моменты времени t =nT.
Y(z) представляет собой отношение двух полиномов,
поэтому коэффициенты ряда Y0, Y1, Y2, ... можно
получить делением полинома числителя на полином
знаменателя.
При Т→0 ряд сходится медленно и объем
вычислительной работы значителен.
73. Вычисление коэффициентов ряда Лорана
Z- изображение выходной координаты:k 1
b0 z b1 z ... bk 1 z bk
B( z )
Y ( z)
m
m 1
A( z ) a0 z a1 z ... am 1 z am
k
пусть k m
:z
m
1
m 1
m
b0 b1 z ... bk 1 z
bk z
.
1
m 1
m
a0 a1 z ... am 1 z
am z
74. Коэффициенты разложения в ряд Лорана:
Y [ 0]b0
a0
;
b1 a1Y [0]
Y [1]
a0
;
b2 a1Y [1] a2Y [0]
Y [ 2]
a0
;
....................................................
bn a1Y [n 1] ... an 1Y [1] anY [0]
Y [ n]
n m bn an 0.
a0
.
1
75. Метод разностного уравнения
Дискретная АСУ представлена передаточнойфункцией:
k 1
R( z ) b0 z b1 z ... bk 1 z bk
W ( z)
m
m 1
Q( z ) a0 z a1 z ... am 1 z am
k
пусть k m
:z
m
1
m 1
m
b0 b1 z ... bk 1 z bk z
Y ( z)
.
1
m 1
m
a0 a1 z ... am 1 z am z
g ( z)
76. Разностное уравнение в этом случае:
a0 y[n] a1 y[n 1] ... am 1 y[n m 1] am y[n m]b0 g[n] b1 g[n 1] ... bm 1 g[n m 1] bm g[n m]
при
m
g[n] 1 bi .
Решение уравнения:
i 1
Y [0]
b0
a0
;
b0 b1 a1Y [0]
Y [1]
a0
;
b0 b1 b2 a1Y [1] a2Y [0]
Y [2]
a0
;......... ..........
n
bi a1Y [n 1] a2Y [n 2] ... ak Y [0]
Y [ n] i 0
2
a0
77.
Рекуррентные зависимости 1 и 2используются и для расчета
переходных процессов в
непрерывных АСУ после
дискретизации их
дифференциальных уравнений.
78. Коррекция импульсных систем
КУ обеспечивают заданные требования поточности и по качеству процесса управления,
исходя из которых составляются желаемые
характеристики АСУ.
Для коррекции импульсных АСУ имеется
большее разнообразие технических средств,
чем для непрерывных АСУ, т.к. кроме
непрерывных КУ можно вводить импульсные и
цифровые.
Находит применение:
•Непрерывная коррекция;
•Импульсная коррекция.
79. Непрерывная коррекция
В этом случае изменяют характеристикинепрерывной части АСУ введением
• последовательных или параллельных КУ,
• местной отрицательной или положительной
обратной связи.
При расчете непрерывных КУ
целесообразно перейти от желаемой
характеристики импульсной АСУ к желаемой
характеристике ее непрерывной части.
Задача синтеза решается так же, как она
решалась для обыкновенных линейных АСУ.
80. Импульсная коррекция
выполняется введением в АСУ импульсного фильтра.Он преобразует входной сигнал x(t) в k
последовательность импульсов
u[n] k k [n i ]x[i ],
i 0
сформированных путем амплитудно-импульсной
модуляции x(t) с необходимыми для коррекции АСУ
преобразованиями.
Здесь kk [n] -импульсная функция непрерывной части
импульсного фильтра.
Передаточная функция импульсного фильтра
определяется как
Wk(z) = Z{ kk [n] }.
По передаточной функции из таблиц выбирают
импульсные корректирующие цепи.
81.
Наиболее просто импульсные КУ реализуются в видеимпульсных RC-цепей.
Различают три структуры импульсных RC-цепей:
• последовательную,
•с обратной связью и
•с каскадным соединением импульсных цепей
первых двух структур.
Цифровые корректирующие фильтры
реализуются с помощью цифрового вычислителя.
Входной сигнал фильтра x(t) преобразуется в АЦП,
далее - решение разностного уравнения на
цифровом вычислителе u выводится x[n] в
непрерывную часть импульсной АСУ через ЦАП.
Широкое распространение получили цифровые
системы, в которых функцию вычислительного
устройства выполняют микропроцессоры и
компьютеры.
82. Синтез цифровых систем
сводится к включению цифрового корректирующего фильтра последовательно снепрерывной частью, включающей в себя
объект управления, регулирующий орган,
исполнительный механизм, усилитель мощности и датчик. В качестве желаемых характеристик используют аналоговые эквиваленты:
импульсные функции, переходные функции и
частотные характеристики, что обосновано
при достаточно высокой тактовой частоте
работы цифрового вычислителя и большой
разрядности преобразователей.