





































 electronics
electronicsSimilar presentations:



")






Цифровая обработка сигналов
1.
ВОЕННО-КОСМИЧЕСКАЯ АКАДЕМИЯ имени А.Ф. МожайскогоКафедра инженерного анализа
Цифровая обработка сигналов
Санкт-Петербург
2020
2. Вопрос 1. Обобщенная схема цифровой обработки сигналов
Вцифровой
обработке
сигнала выделяют три основных
этапа:
- формирование цифрового
сигнала хц(nT) из исходного
аналогового сигнала х(t);
преобразование
цифрового сигнала хц(nT) в
цифровой сигнал yц(nT) по
заданному алгоритму;
формирование
результирующего аналогового
сигнала y(t) из цифрового
сигнала yц(nT).
В
обобщенной
схеме
цифровой обработки сигналов
этим этапам соответствуют
три
функциональных
устройства: кодер, устройство
ЦОС, декодер.
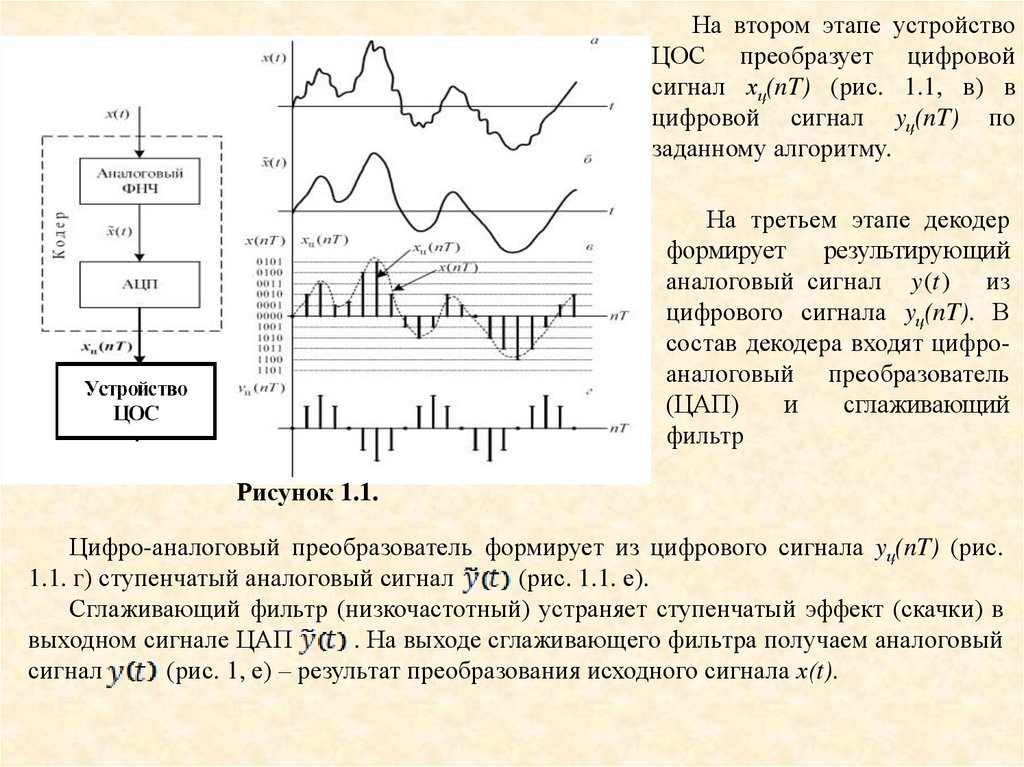
Рисунок 1.1.
На первом этапе кодер из исходного аналогового
сигнала х(t) (рис. 1.1, а) формирует цифровой сигнал
хц(nT) (рис. 1.1, в).
3.
Аналоговый фильтр нижних частот предназначен для ограничения спектраX(jω) исходного аналогового сигнала х(t).
Необходимость ограничения спектра вытекает из теоремы Котельникова, в
соответствии с которой частота дискретизации f Д выбирается из условия: f Д 2 f В , где f .В
– верхняя частота спектра сигнала.
Аналого-цифровой преобразователь формирует цифровой сигнал хц(nT) посредством
дискретизации и квантования сигнала ~
x (t ) (рис. 1.1, в).
Дискретизация по времени (дискретизация) представляет собой процедуру взятия
мгновенных значений – отсчетов – аналогового сигнала ~x (t )
с интервалом времени,
равным периоду дискретизации T. Значения отсчетов x(nT ) совпадают со значениями
сигнала ~
x (t ) в моменты времени t nT .
Совокупность отсчетов x(nT ), n 0,1,... называют дискретным сигналом.
Квантование по уровню (квантование) производится с целью представления точных
значений отсчетов x(nT ) в виде двоичных чисел конечной разрядности – квантованных
отсчетов хц(nT).
4.
На втором этапе устройствоЦОС преобразует цифровой
сигнал хц(nT) (рис. 1.1, в) в
цифровой сигнал yц(nT) по
заданному алгоритму.
На третьем этапе декодер
формирует результирующий
аналоговый сигнал y (t ) из
цифрового сигнала yц(nT). В
состав декодера входят цифроаналоговый преобразователь
(ЦАП)
и
сглаживающий
фильтр
Рисунок 1.1.
Цифро-аналоговый преобразователь формирует из цифрового сигнала yц(nT) (рис.
1.1. г) ступенчатый аналоговый сигнал
(рис. 1.1. е).
Сглаживающий фильтр (низкочастотный) устраняет ступенчатый эффект (скачки) в
выходном сигнале ЦАП
. На выходе сглаживающего фильтра получаем аналоговый
сигнал
(рис. 1, е) – результат преобразования исходного сигнала х(t).
5.
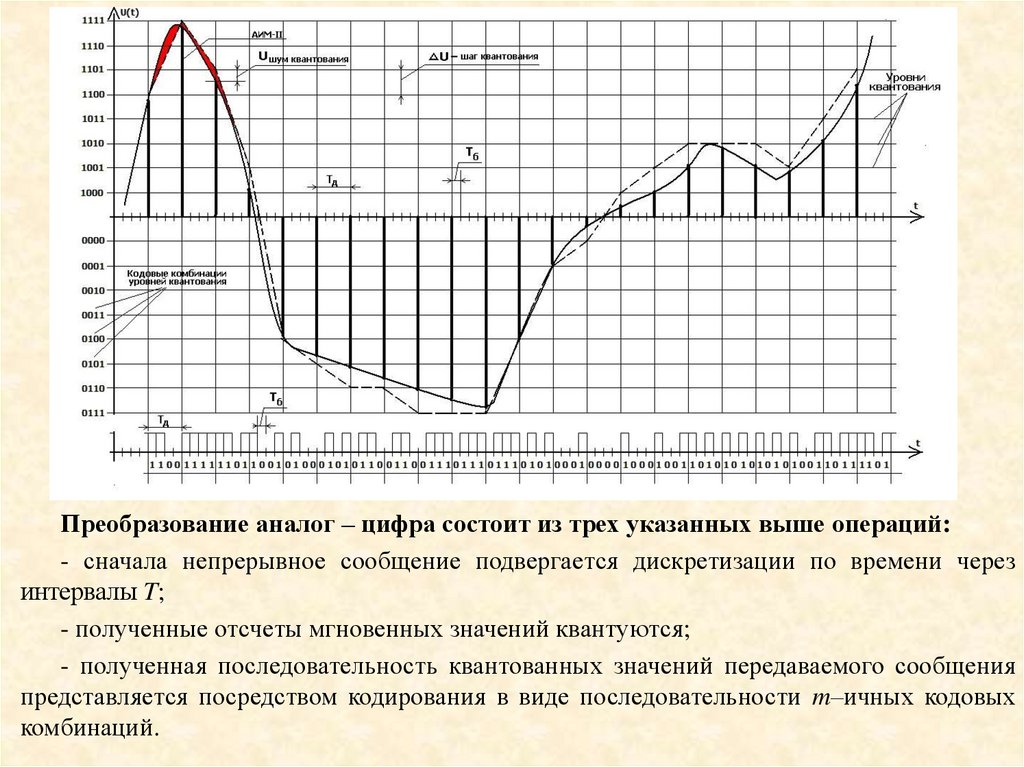
Преобразование аналог – цифра состоит из трех указанных выше операций:- сначала непрерывное сообщение подвергается дискретизации по времени через
интервалы T;
- полученные отсчеты мгновенных значений квантуются;
- полученная последовательность квантованных значений передаваемого сообщения
представляется посредством кодирования в виде последовательности m–ичных кодовых
комбинаций.
6.
Вопрос 2.Основные типы сигналов и их математическое
описание. Нормирование времени.
Сигналом называют физический процесс, несущий в себе информацию.
Математически сигналы описываются функциями времени, тип которых зависит от типа
сигнала. К основным типам сигналов относят: аналоговый, дискретный и цифровой.
Аналоговым называют сигнал, непрерывный по
времени и состоянию (рис. 2.1, а). Такой сигнал
описывается непрерывной или кусочно-непрерывной
функцией х(t), при этом и аргумент, и функция могут
принимать любые значения из некоторых интервалов
.
соответственно
Рисунок 2.1.
Дискретным называют сигнал, дискретный по
времени и непрерывный по состоянию (рис. 2.1, б).
Такой сигнал описывается решетчатой функцией
(последовательностью) x(nT), n=0,1,… которая
определена только в дискретные' моменты времени
nT и может принимать любые значения из некоторого
интервала
.
Интервал Т называют периодом дискретизации, а обратную величину – частотой
1
дискретизации f Д .
Т
7.
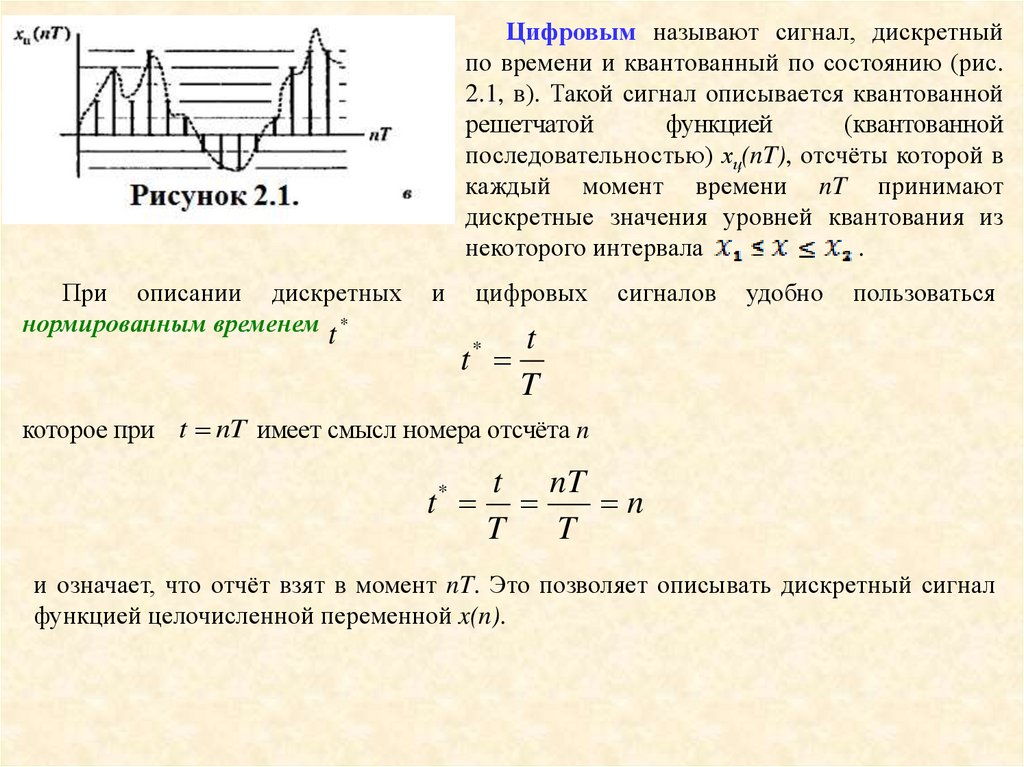
Цифровым называют сигнал, дискретныйпо времени и квантованный по состоянию (рис.
2.1, в). Такой сигнал описывается квантованной
решетчатой
функцией
(квантованной
последовательностью) хц(nT), отсчёты которой в
каждый момент времени nT принимают
дискретные значения уровней квантования из
некоторого интервала
.
При описании дискретных
нормированным временем t *
и
цифровых
сигналов
удобно
пользоваться
t
t
T
*
которое при t nT имеет смысл номера отсчёта n
t nT
t
n
T
T
*
и означает, что отчёт взят в момент nT. Это позволяет описывать дискретный сигнал
функцией целочисленной переменной x(n).
8. Вопрос 3. Типовые дискретные сигналы
1 Цифровой единичный импульс, описываемыйпоследовательностью
1, n 0
(3.1)
u 0 ( n)
,
0, n 0
т. е. этот сигнал равен единице при n=0 и нулю при всех
остальных значениях п (рис. 3.1, а).
Задержанный цифровой единичный импульс
описывается последовательностью
1, n т
u 0 ( n т)
,
0
,
n
т
Рисунок 3.1.
(3.2)
т. е. этот сигнал равен единице при n=m и нулю при всех
остальных значениях п (рис. 3.1, б).
Из определения задержанного цифрового единичного
импульса вытекает соотношение
x(n) x(m)u0 (n m).
m 0
(3.3)
9.
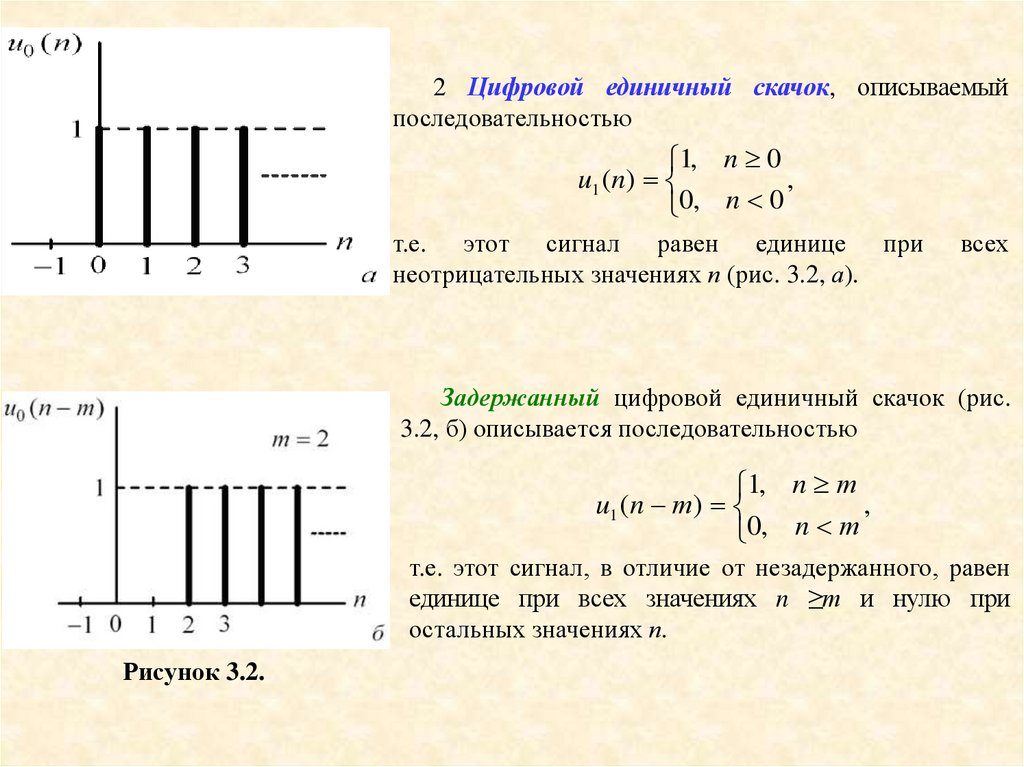
2 Цифровой единичный скачок, описываемыйпоследовательностью
1, n 0
u1 (n)
,
0
,
n
0
т.е. этот сигнал равен единице при
неотрицательных значениях п (рис. 3.2, а).
всех
Задержанный цифровой единичный скачок (рис.
3.2, б) описывается последовательностью
1, n т
u1 (n т)
,
0
,
n
т
т.е. этот сигнал, в отличие от незадержанного, равен
единице при всех значениях n ≥т и нулю при
остальных значениях п.
Рисунок 3.2.
10.
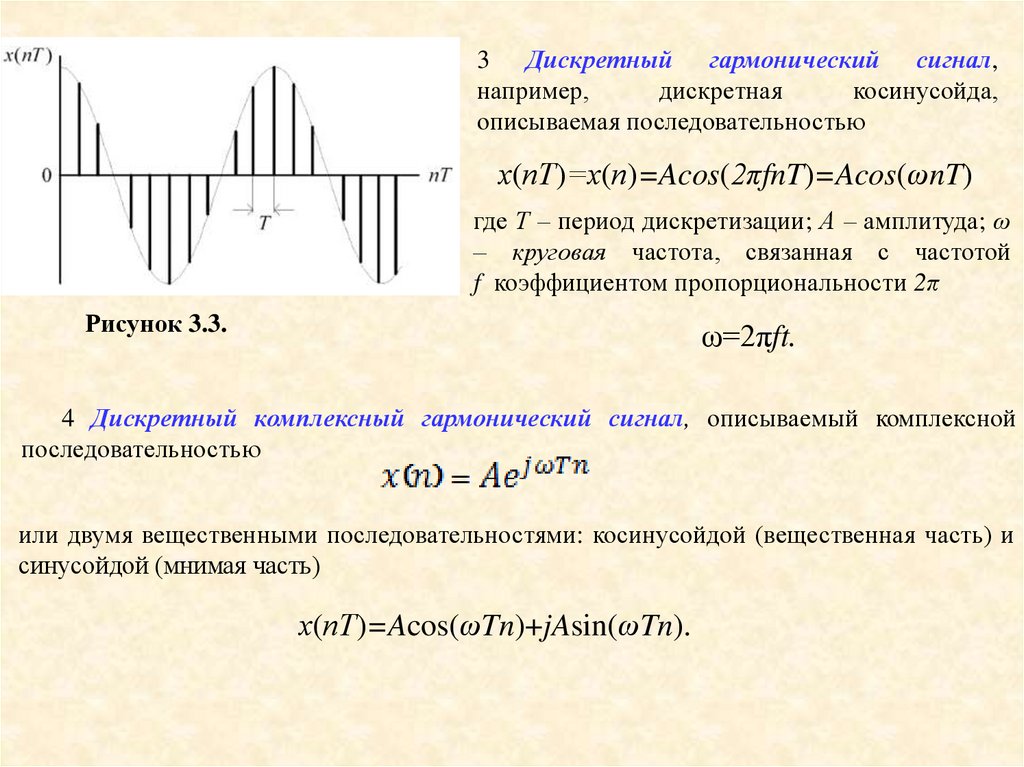
3 Дискретный гармонический сигнал,например,
дискретная
косинусойда,
описываемая последовательностью
х(пТ)=х(п)=Acos(2πfnT)=Acos(ωnT)
где Т – период дискретизации; А – амплитуда; ω
– круговая частота, связанная с частотой
f коэффициентом пропорциональности 2π
Рисунок 3.3.
ω=2πft.
4 Дискретный комплексный гармонический сигнал, описываемый комплексной
последовательностью
или двумя вещественными последовательностями: косинусойдой (вещественная часть) и
синусойдой (мнимая часть)
х(пТ)=Acos(ωTn)+jAsin(ωTn).
11.
5. Дискретная экспонента, описываемая последовательностьюa n , n 0
xn
,
0, n 0
где а – вещественная константа. В зависимости от величины и знака а дискретная
экспонента будет:
- a 1 и a 0 – убывающей знакопостоянной (рис. 3.4 а);
- a 1 и a 0 – убывающей знакопеременной (рис. 3.4 б);
- a 1 – возрастающей;
- a 1 и a 0 – цифровым единичным скачком;
- a 1 и a 0 – знакопеременной последовательностью единиц.
Рисунок 3.4
12. Вопрос 4. Основная полоса частот. Нормирование частоты
Согласно теореме Котельникова, верхняя частота f В аналогового сигнала не должнаfД
превышать половины частоты дискретизации
этого сигнала. Следовательно
f
дискретные сигналы целесообразно рассматривать в области 0; Д , которая называется
2
основной полосой частот или основным диапазоном частот.
Это позволяет ввести понятие нормированных частот:
f – отношение текущей частоты f к частоте дискретизации f Д
f
f
fТ ;
fД
– отношение текущей частоты к ω частоте дискретизации f Д
fД
Т .
13.
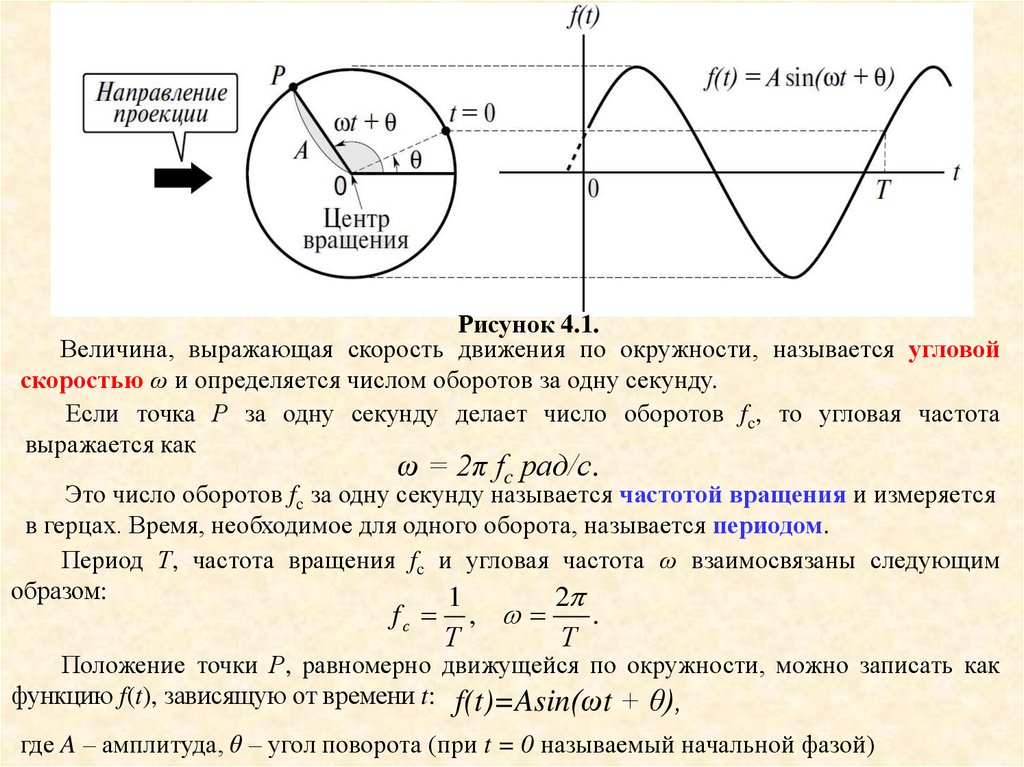
Рисунок 4.1.Величина, выражающая скорость движения по окружности, называется угловой
скоростью ω и определяется числом оборотов за одну секунду.
Если точка Р за одну секунду делает число оборотов fc, то угловая частота
выражается как
ω = 2π fc рад/с.
Это число оборотов fc за одну секунду называется частотой вращения и измеряется
в герцах. Время, необходимое для одного оборота, называется периодом.
Период Т, частота вращения fc и угловая частота ω взаимосвязаны следующим
образом:
1
2
fс
Т
,
Т
.
Положение точки Р, равномерно движущейся по окружности, можно записать как
функцию f(t), зависящую от времени t: f(t)=Asin(ωt + θ),
где A – амплитуда, θ – угол поворота (при t = 0 называемый начальной фазой)
14. Вопрос 5. Математическое описание аналоговых сигналов и линейных систем в p- области и частотной области
Преобразование ЛапласаМатематическое описание аналоговых сигналов и линейных систем в p-области (на комплексной
p-плоскости) и в частотной области основано соответственно на преобразованиях Лапласа и Фурье
функции времени x(t ), для которого выполняется условие
x(t ) t 0 0.
(5.1)
Преобразование Лапласа функции x(t ) называется следующая пара взаимно однозначных
преобразований:
- прямое преобразование
X ( p) L x(t ) x(t )e
pt
- обратное преобразование
j
dt;
0
(5.2)
1 0
pt
x(t ) L X ( p)
X
(
p
)
e
dp, (5.3)
2 j 0 j
1
L x(t ) , L 1 X ( p) – символическое обозначение прямого и обратного преобразования Лапласа.
x(t ) – оригинал – вещественная или комплексная функция (5.1), непрерывная или кусочнонепрерывная, однозначная на любом конечном интервале в области определения, имеющая
экспоненциальный порядок и ограниченную возможность возрастания.
р – оператор Лапласа
р j ;
X ( p ) – L-изображение (L-образ) функции x(t ), результата преобразования Лапласа.
0 – абсцисса абсолютной сходимости интеграла (5.2).
15.
ПреобразованиеФурье
- прямое преобразование X ( j ) x(t )e j t dt;
(5.3)
0
- обратное преобразование
1
x(t )
2
X ( j ) e
j t
d ,
(5.4)
Связь преобразования Фурье с преобразованием Лапласа
Условие: абсолютная сходимость соответствующих интегралов фурье-изображения
X ( j ) функции
x(t ) с её L-изображением X ( p ), если область
значений переменной р на комплексной р-плоскости ограничена
точками на оси частот j : X ( j ) X ( р) р j .
Ряд Фурье.
Непрерывная периодическая функция времени x(t ) с периодом Тs, удовлетворяющая в
пределах периода условиям Дирихле, может быть представлена в виде ряда Фурье
x(t )
X ( k )e
k
– период дискретизации по частоте
jk t
,
2
Тs
X (k ) – коэффициент Фурье (комплексные числа): X ( k )
k – номер коэффициента Фурье, соответствующего частоте
1
Ts
Ts
2
jk t
x
(
t
)
e
dt ;
Ts
2
k .
16.
Вопрос 6.Математическое описание дискретных сигналов
и линейных систем в z-области и частотной области.
Математическое описание дискретных сигналов и линейных систем в z-области (на
комплексной z-плоскости) и в частотной области основано соответственно на Zx (nТ ) , для которого
преобразовании и преобразовании Фурье последовательности
выполняется условие
(6.1)
x(nt ) n 0 0.
В результате перехода от непрерывного времени к дискретному t nT и замены
непрерывной функции последовательностью x(t ) x(nT ) интеграл в (1.2) заменяется
суммой.
Соответственно, дискретным преобразованием Лапласа называется следующий ряд
X (e ) D x(nT ) x(nT )e pnT ,
pT
(6.2)
n 0
D x(nT ) – символическое обозначение дискретного преобразования Лапласа;
x (nТ ) – оригинал – вещественная или комплексная последовательность (6.1) ;
X (e pT ) – D-изображение (D-образ) последовательности
преобразования Лапласа.
x (nТ ) результат дискретного
17.
Z-преобразование.z e pT .
(6.4)
Z-преобразованием последовательности x (nТ ) (6.1) называется следующий ряд:
X ( z ) Z x(nT ) x(nT ) z n ,
(6.5)
n 0
Z x(nT )
– символическое обозначение Z-преобразования;
x (nТ ) – оригинал – вещественная или комплексная последовательность (6.1) ;
X (z ) – z-изображение (z-образ) последовательности
x (nТ ) , результат дискретного z-
преобразования.
Связь Z-преобразования с дискретным преобразованием Лапласа
Сравнивая дискретное преобразование Лапласа (6.2) и Z-преобразование (6.5)
X ( z)
z e
pT
X (e pT ).
При исследовании дискретных сигналов и линейных систем используют Z-преобразование, а не Dпреобразование. Так как, подобно преобразованию Лапласа непрерывных функций, Z-преобразование
последовательности позволяет получить алгебраические соотношения, в то время как D-преобразование
приводит к весьма неудобным для анализа трансцендентным соотношениям.
Связь преобразование Фурье с Z-преобразованием
Условие: абсолютная сходимость соответствующих рядов фурье-изображения X (e j T )
последовательности x(nТ ) совпадает с её z-изображением X (z ) ,
если область значений переменной z на комплексной z-плоскости
ограничена точками на единичной окружности e j T :X (e j T ) X ( z ) j T
z e
18. Вопрос 7. Z-преобразование
Z-преобразованием последовательности x (nТ ) называется следующий ряд:X ( z ) Z x(nT ) x(nT ) z n ,
n 0
Z x(nT )
(7.1)
– символическое обозначение Z-преобразования;
x (nТ ) – оригинал – последовательность вещественная или комплексная
последовательность для которой выполняется условие
x(nt ) n 0 0.
X (z ) – Z-изображение (Z-образ) последовательности
(7.2)
x (nТ ) , результат дискретного Z-
преобразования.
Z-преобразование получено на основе дискретного преобразования Лапласа в
результате замены переменных
р – оператор Лапласа
z e pT
р j .
(7.3)
(7.4)
Комплексная переменная Z может быть представлена в двух формах:
- в алгебраической форме z j ;
- в показательной форме
z re j ,
где: радиус r является модулем, а угол – аргумент переменной z (1.5):
r z ;
2
2
(1.7)
arg( z ) arctg .
(7.5)
(7.6)
(1.8)
19.
Рисунок 1.1. – Область сходимости z-изображения20.
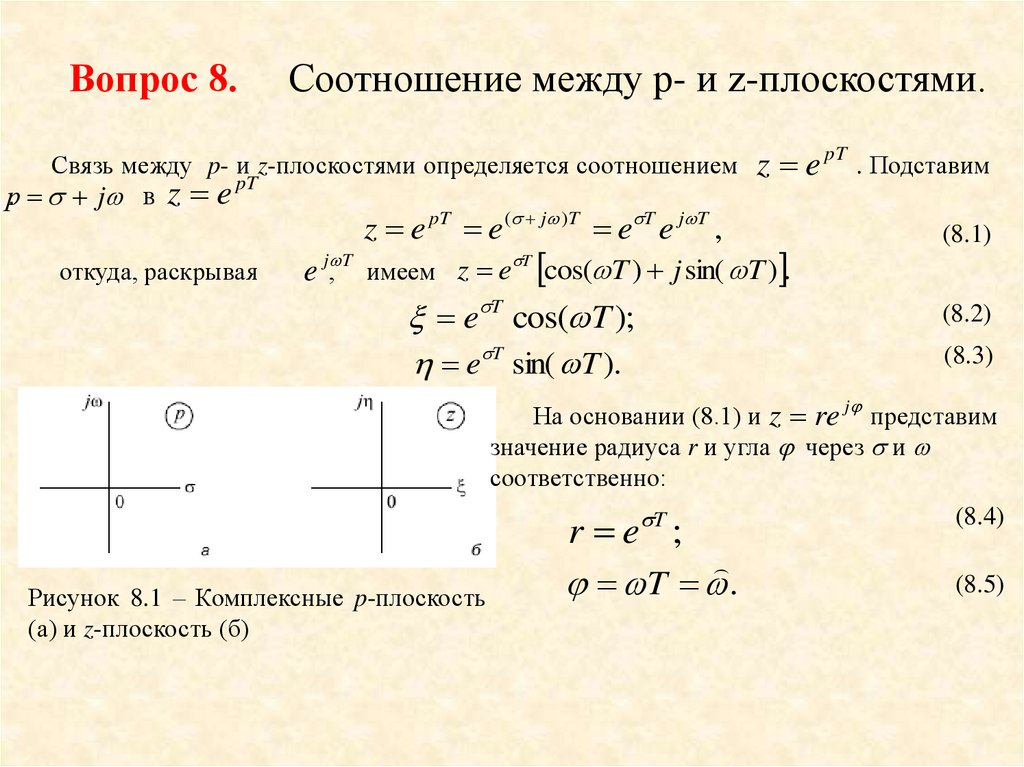
Вопрос 8.Соотношение между p- и z-плоскостями.
Связь между p- и z-плоскостями определяется соотношением
pT
р. j в z e
z e pT e ( j )T e T e j T ,
откуда, раскрывая
z e pT . Подставим
e j, T имеем z e T cos( T ) j sin( T ) .
(8.1)
e T cos( T );
(8.2)
e T sin( T ).
(8.3)
На основании (8.1) и z re j представим
значение радиуса r и угла через и
соответственно:
(8.4)
T
Рисунок 8.1 – Комплексные p-плоскость
(а) и z-плоскость (б)
r e ;
T .
(8.5)
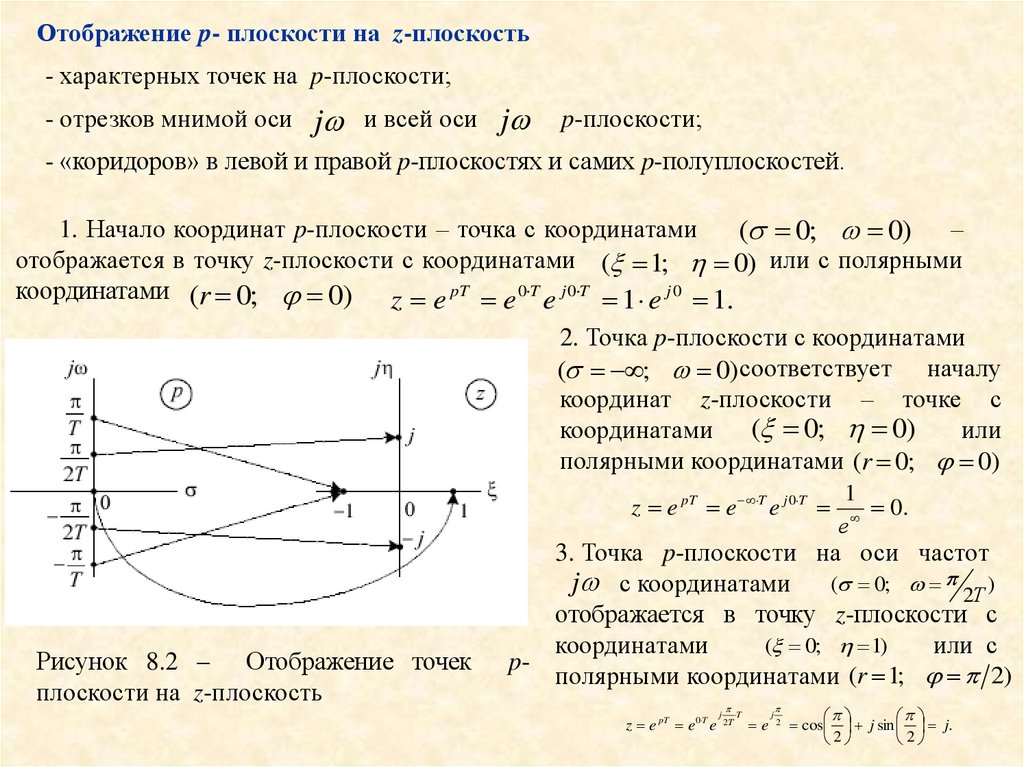
21.
Отображение p- плоскости на z-плоскость- характерных точек на p-плоскости;
- отрезков мнимой оси
j и всей оси j p-плоскости;
- «коридоров» в левой и правой p-плоскостях и самих p-полуплоскостей.
1. Начало координат p-плоскости – точка с координатами
( 0; 0) –
отображается в точку z-плоскости с координатами ( 1; 0) или с полярными
координатами (r 0; 0) z e pT e 0 T e j 0 T 1 e j 0 1.
2. Точка p-плоскости с координатами
( ; 0) соответствует началу
координат z-плоскости – точке с
координатами ( 0; 0)
или
полярными координатами (r 0; 0)
z e pT e T e j 0 T
Рисунок 8.2 – Отображение точек
плоскости на z-плоскость
1
0.
е
3. Точка p-плоскости на оси частот
j с координатами ( 0; 2Т )
отображается в точку z-плоскости с
( 0; 1)
координатами
или с
pполярными координатами (r 1; 2)
z e pT e 0 T e
j
2Т
T
e
j
2
cos j sin j.
2
2
22.
( 0; )4. Точка p-плоскости на оси частот
j с координатами
2Т
отображается в точку z-плоскости с координатами ( 0; 1) или с полярными
координатами (r 1; 2) z e e e e cos j sin j.
2
2
5. Две точки p-плоскости на оси частот j с координатами ( 0; Т ) отображается
в одну точку z-плоскости с координатами ( 1; 0) или с полярными координатами
j T
pT
0 T
(r 1; )
z e e e Т e j cos j sin 1.
0 T
pT
6. Отрезок оси частот
j p-плоскости
j
2Т
T
j
2
0;
Т
T
2
Д
T
отображается на z-плоскости в окружность единичного радиуса (единичная
окружность)
z e pT e 0 T e j T e j Т е j ;
r 1; 2 .
7. «Коридор» в левой p-полуплоскости
0;
Т
T
2
Д
T
отображается на z-плоскости в круг единичного
радиуса (единичный круг) z e pT e T e j ;
Рисунок 8.4 – Отображение «коридора» в
r 1; 2 . левой p-полуплоскости на z-плоскость
8. «Коридор» в правой p-полуплоскости
0;
Т
T
2
Д
T
отображается на z-плоскости в области вне
единичного круга
z e pT e T e j ;
r 1; 2 .
Рисунок 8.5 – Отображение «коридора»
в правой
p-полуплоскости на zплоскость
23.
Вопрос 9.Основные свойства z-преобразования.
Z-преобразованием последовательности x (nТ ) называется следующий ряд:
X ( z ) Z x(nT ) x(nT ) z n ,
n 0
Одним из важнейших свойств z-преобразования является свойство его единственности,
в соответствии с которым последовательность x (nТ ) x(nt ) n 0 0 однозначно определяется
z-изображением X (z ) в области его сходимости и наоборот, z-изображение однозначно
определяет последовательность X (z )
1. Линейность.
Если последовательность x (nТ ) (1.2) равна линейной комбинации последовательности
x(nТ ) а1 х1 (nТ ) а2 х2 (nТ ) ....,
то её z-изображение равно линейной комбинации z-изображений данных
Z x(nT ) X ( z) a1 X 1 ( z) a2 X 2 ( z) ...
последовательностей:
2. Z-преобразование задержанной последовательности (теорема о задержке).
Z-преобразование последовательности x (n m)Т , задержанный на m (m 0) отсчетов,
равно z-изображению незадержанной последовательности x(nТ ) (1.2), умноженной на z m
Z x(nT ) X ( z);
Z x (n m)T X ( z ) z m
3. Z-преобразование свертки последовательностей (теорема о свертке)
Сверткой последовательности x1 (nТ ) и x2 (nТ ) называется последовательность
x(nТ ), определяемая соотношением:
Z x(nT ) X ( z) X 1 ( z) X 2 ( z).
24.
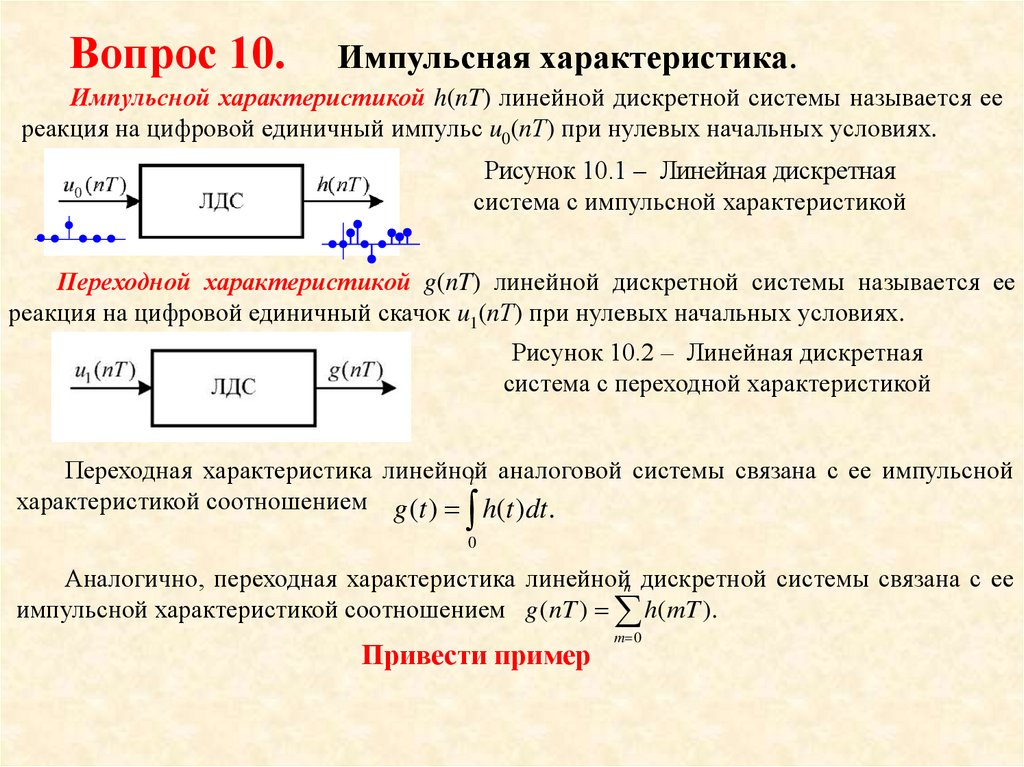
Вопрос 10.Импульсная характеристика.
Импульсной характеристикой h(nT) линейной дискретной системы называется ее
реакция на цифровой единичный импульс u0(nТ) при нулевых начальных условиях.
Рисунок 10.1 – Линейная дискретная
система с импульсной характеристикой
Переходной характеристикой g(nT) линейной дискретной системы называется ее
реакция на цифровой единичный скачок u1(nТ) при нулевых начальных условиях.
Рисунок 10.2 – Линейная дискретная
система с переходной характеристикой
Переходная характеристика линейной
t аналоговой системы связана с ее импульсной
характеристикой соотношением g (t ) h(t ) dt.
0
Аналогично, переходная характеристика линейнойn дискретной системы связана с ее
импульсной характеристикой соотношением g ( nT ) h( mT ).
Привести пример
m 0
25.
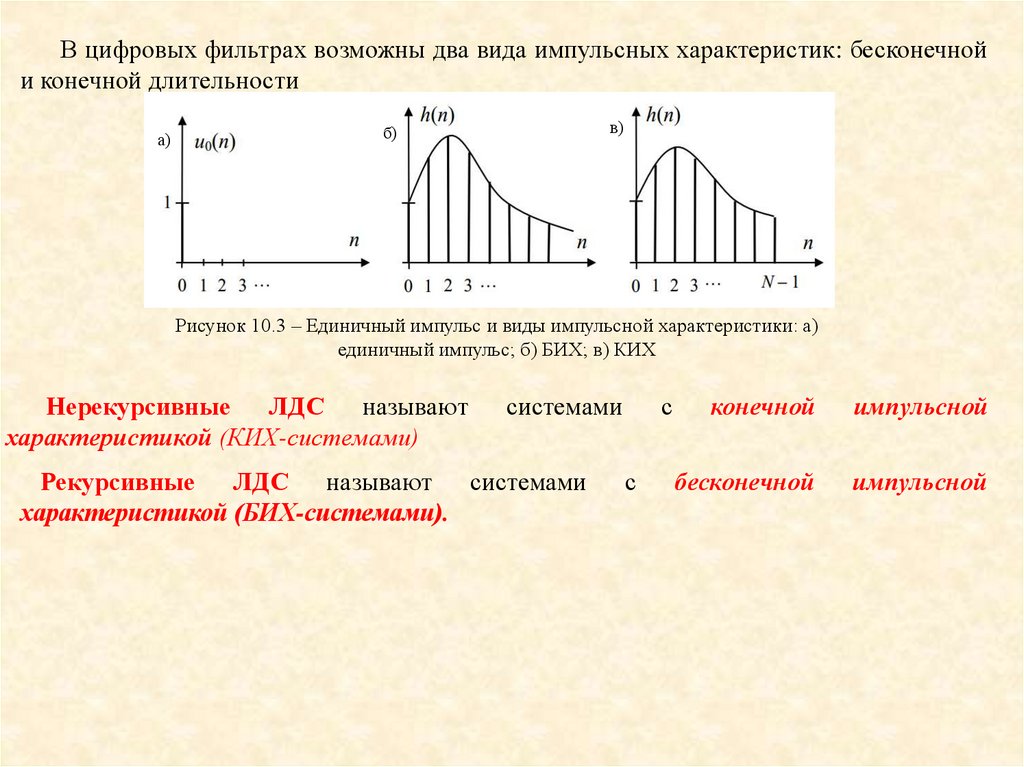
В цифровых фильтрах возможны два вида импульсных характеристик: бесконечнойи конечной длительности
а)
в)
б)
Рисунок 10.3 – Единичный импульс и виды импульсной характеристики: а)
единичный импульс; б) БИХ; в) КИХ
Нерекурсивные ЛДС называют
характеристикой (КИХ-системами)
системами
Рекурсивные ЛДС называют системами
характеристикой (БИХ-системами).
с
с
конечной
импульсной
бесконечной
импульсной
26. Вопрос 11. Соотношение вход/выход линейной дискретной системы.
По определению, воздействию в виде цифрового единичного импульса соответствует реакция,называемая импульсной характеристикой u0 (nT ) h(nT );
На основании свойства инвариантности во времени для ЛДС u0 (n m)T h (n m)T ;
На основании свойства однородности линейных систем
u0 (n m)T x(mT ) h (n m)T x(mT );
На основании свойства аддитивности линейных систем
u0 (n m)T x(mT )
Для физически реализуемых систем
m
h (n m)T x(mT );
m
u (n m)T x(mT ) h (n m)T x(mT );
0
Слева имеем воздействие в виде
Справа - реакцию
m 0
m 0
x( nT ) u0 ( n m)T x ( mT ),
m 0
y ( nT ) h ( n m)T x( mT ),
m 0
(11.1)
где h[(n-m)T] – импульсная характеристика, задержанная на т периодов дискретизации
Линейное уравнение (11.1) называют формулой свертки (сверткой): реакция у(пТ)
вычисляется как дискретная свертка воздействия х(пТ) и импульсной характеристики
h(nT).
y (nT ) h(mT ) x[( n m)T ].
(11.2)
m 0
27.
Для нормированногосоответственно
времени
формулы
(11.1)
и
(11.2)
принимают
вид
y ( n) h(n m) x( m).
m 0
y ( n) h( m) x( n m).
m 0
Наряду с формулой свертки взаимосвязь между воздействием х(nТ) и реакцией у(nТ)
– соотношение вход/выход – может описываться линейным разностным уравнением
N 1
M 1
порядка N c постоянными параметрами
(11.3)
y (nT ) b x[( n i )T ] a y[( n k )T ],
i 0
i
k 1
k
где bi, ak – коэффициенты (вещественные константы);
х(пТ), у(пТ) – воздействие и реакция (вещественные или комплексные);
i, k – значения задержек для воздействия и реакции соответственно;
N, М – константы;
x[(n-i)T], y[(n-k)T] – воздействие и реакция, задержанные на i и k периодов
дискретизации соответственно.
Коэффициенты bi, и аk называют внутренними параметрами ЛДС. Для
нормированного времени разностное уравнение (11.3) принимает вид
N 1
M 1
y ( n) bi x(n i ) ak y (n k ).
i 0
(11.4)
k 1
Линейная дискретная система называется рекурсивной, если хотя бы один из
коэффициентов аk, k =1, 2,..., М -1 разностного уравнения (11.4) не равен нулю.
Линейная дискретная система называется нерекурсивной, если все коэффициенты аk
разностного уравнения (1.2) равны нулю.
28. Вопрос 12. Свойства линейных дискретных систем.
Система называется линейной, если она отвечает двум условиям:- реакция на сумму воздействий равна сумме реакций на каждое из воздействий
(свойство аддитивности или принцип суперпозиции)
F(x1 + х2 + ...) = F(x1) + F(х2)+...;
(12.3)
- умножению воздействия на весовой коэффициент соответствует реакция,
умноженная на тот же коэффициент (свойство однородности)
F(ax) = aF(x).
(12.4)
Дискретная система называется стационарной, если ее реакция инвариантна по
отношению к началу отсчета времени (свойство инвариантности во времени), т. е. для
реакций у(nТ) и у1(nТ) = у[(n - m)T] при любом целом m справедливо равенство
у(nТ) = у1[(n + m)Т].
В стационарной системе задержка воздействия на время mT (m > 0) приводит к
задержке реакции на то же время
x n m T y1 n m T .
29.
Свойство памяти линейных дискретных систем.Свойство памяти системы подразумевает ее способность "помнить предысторию"
(предшествующие отсчеты воздействия) при вычислении реакции в текущий момент
времени. Длительность предыстории (количество предшествующих отсчетов
воздействия) определяет длительность памяти.
Согласно разностному уравнению нерекурсивной ЛДС, при вычислении реакции
у(n) в текущий n-й момент времени система "помнит" (N - 1) предшествующих отсчетов
воздействия. Следовательно, нерекурсивная ЛДС обладает свойством памяти, ее
длительность конечна и равна (N -1).
Согласно разностному уравнению рекурсивной ЛДС, каждый текущий отсчет
реакции у(n) можно выразить через предшествующие отсчеты воздействия.
Устойчивость линейных дискретных систем.
ЛДС называется устойчивой, если при ограниченном воздействии max x( n) Rx ,
n
где Rx – любое сколь угодно большое положительное число, не равное бесконечности, и
произвольных, но ограниченных начальных условиях реакция будет также ограниченной
max y ( n) R y ,
n
где Ry – любое сколь угодно большое положительное число, не равное бесконечности.
Существуют два критерия устойчивости ЛДС. Один из них позволяет оценить
устойчивость ЛДС по ее характеристике во временной области, другой – по zизображению этой характеристики в z-области.
30. Вопрос 13. Передаточная функция.
Передаточной функцией H(z) линейной дискретной системы называетсяY ( z)
H ( z)
отношение z-изображения реакции к z-изображению воздействия при нулевых
X ( z ) начальных условиях.
N 1
M 1
y (n) bi x(n i ) ak y (n k )
Разностному уравнению
i 0
k 1
в z-области при нулевых начальных условиях соответствует уравнение, которое можно получить,
выполнив z-преобразование левой и правой частей разностного уравнения, Z{ y(n)} Z b x(n i) a y(n k ) .
N 1
Воспользуемся свойством линейности z-преобразования и теоремой о задержке:
i 0
M 1
i
k 1
k
N 1
M 1
i 0
k 1
Y ( z ) X ( z ) bi z i Y ( z ) ak z k ,
приведем подобные члены и получим соотношение вход/выход в z-области в виде алгебраического
N 1
уравнения:
b z i
Y ( z)
i 0
M 1
i
1 ak z
X ( z ).
k
k 1
Разделив обе части на X(z), получим передаточная функция, не зависящая ни от воздействия, ни
от реакции и выраженную через внутренние параметры ЛДС (коэффициенты разностного
N 1
уравнения)
(13.1)
bi z i
H ( z)
Порядок передаточной функции равен max{(М-1), (N-1)}.
Как любая дробно-рациональная функция, передаточная функция
особыми точками полюсами и нулями.
i 0
M 1
1 ak z
.
k
k 1
характеризуется своими
Нулями называют значения z, при которых передаточная функция (13.1) равна нулю.
Полюсами называют значения z, при которых знаменатель передаточной функции (13.1) равен
нулю.
31.
Взаимосвязь между передаточной функцией и разностным уравнениемИз сопоставления передаточной функции общего вида (13.1) и разностного уравнения
понятна их взаимосвязь при нулевых начальных условиях:
а) числитель передаточной функции связан с отсчетами воздействия
bix(n-i) разностного уравнении;
- задержка отсчета x(n - i) отображается в передаточной функции степенью z-i;
- коэффициент bi сохраняется.
Символически это можно записать следующим образом: bix(n-i) <=> biz-i;
б) знаменатель передаточной функции связан с отсчетами реакции у(п) и aky(n-k)
разностного уравнении:
- свободный член знаменателя всегда равен 1 (а0 = 1), в разностном уравнении он
соответствует реакции у(п);
- задержка отсчета y(n-k) отображается в передаточной функции степенью z-k ;
- у коэффициента ак изменяется знак.
Символически это можно записать следующим образом: aky(n - k)<=> - akz-k .
Простейшие ЛДС, описываемые передаточными функциями 1-го и 2-го порядков,
называют звеньями 1-го и 2-го порядков (Привести примеры).
Частотная характеристика дискретной системы, определяемая отношением Фурье образов выходного и входного сигналов,
с учетом связи между z- и Фурье
j T
преобразованиями
X ( z ) z e
X ( j ) x ( n ) e
.
Д
j T Д
n 0
находится по передаточной функции системы H(z) простой заменой z на e
Н ( j ) Y( j ) X ( j ) Н ( z ) z e j T Д .
j T Д
:
32.
Вопрос 14. Разновидности передаточных функций.Разновидности передаточных
функций, обусловленные различным математическим
N 1
i
bi z
представлением
i 0
H ( z)
M 1
1 ak z k
N 1
k 1
- в виде произведения простейших множителей
H ( z)
b0 (1 i z 1 )
i 1
M 1
(1 ak z )
1
,
(13.1)
k 1
где βi = z0i и αк = z*k – i-й нуль и k-й полюс передаточной функции. В общем случае, как
нули, так и полюсы – попарно комплексно-сопряженные числа.
Если N = М, то
(1 k z 1 )
;
H ( z ) b0 H k ( z ) b0
1
(
1
a
z
)
k 1
k 1
k
M 1
M 1
(13.2)
вещественными
- в виде произведения множителей второго порядка с
коэффициентами.
Для перехода к передаточной функции с вещественными коэффициентами в (2.1)
попарно умножают простейшие множители с комплексно сопряженными нулями (в
числителе) и комплексно-сопряженными полюсами (в знаменателе) (1 – akz-l)(1- ak+lz-1),
где ak, ak+1 – комплексно-сопряженные полюсы. Представим их в алгебраической форме
ak = ξk + jηk; ak+1 = ξk – jηk
Получаем множитель второго порядка с вещественными
коэффициентами a1k = -2ξk и a2 k ( k2 k2 ).
33.
- в виде суммы простых дробей.Если у передаточной функции общего вида (13.1) порядок многочлена числителя
меньше порядка многочлена знаменателя и все полюсы простые (не кратные), она может
быть представлена в виде суммы простых дробей
где: ак =z*k – простой k - и полюс передаточной
функции. В общем случае полюсы попарно
комплексно-сопряженные числа;
Ак – коэффициент разложения при k - м полюсе.
(М-1) – количество полюсов ак (и констант Ак ).
Разновидности передаточных функций, обусловленные типом ЛДС
1. Рекурсивные ЛДС описываются передаточной функцией общего вида и могут
иметь любое математическое представление.
Среди передаточных функций выделяют передаточная функция
полюсного вида, у которой числитель – многочлен нулевой степени
Передаточная функция имеет (М-1) полюсов и (М-1) кратных нулей, равных 0. Она
может иметь математическое представление:
- в виде произведения простейших множителей
- в виде произведения множителей второго порядка с
вещественными коэффициентами
Звено называют базовым, если числитель его
передаточной функции Н(z) равен 1.
34.
2. Нерекурсивные ЛДС описываются передаточной функцией, которая можетрассматриваться как частный случай H(z) общего вида (1.6) при ak = 0, к =1, 2,..., М -1. При
этом знаменатель H(z) оказывается равным единице, и передаточная функция имеет вид
рациональной функции
или, с учетом предыдущей формулы,
Передаточная функция может быть представлена:
- в виде произведения простейших множителей
- в виде произведения
коэффициентами
где (N-1) – четное число.
множителей
второго
порядка
с
вещественными
35. Вопрос 15. Частотная характеристика ЛДС.
В частотной области основной характеристикой ЛДС является Фурье-изображениеимпульсной характеристики h(nT), которое определяется с помощью преобразования
Фурье:
j T
H (e ) h(nT )e j Tn
(15.1)
n 0
j n
для нормированного времени и частоты H (e ) h(n)e
j
(15.2)
n 0
и называется комплексной частотной характеристикой (КЧХ) или частотной
характеристикой.
H (e j T ) описывает функциональную зависимость изменения комплексной амплитуды
входного сигнала от частоты .
Комплексную функцию H (e j T ) можно выразить через ее модуль и аргумент:
(15.3)
H (e j ) H (e j ) e j arg{H (e )} A( )e j ( ) .
Модуль и аргумент частотной характеристики (15.3) отображают изменения
амплитуды и фазы гармонической реакции относительно гармонического воздействия,
которые зависят от частоты воздействия
Модуль частотной характеристики
называют амплитудно-частотной
H (e j T )
характеристикой (АЧХ):
j
j
A( ) H (e ) ,
а аргумент – фазочастотной характеристикой (ФЧХ) ЛДС: ( ) arg{ H (e
j
)}.
36.
jНа основании y(n) x(n) H (e ) частотную характеристику можно представить как
отношение гармонических сигналов – воздействия и реакции и определить следующим
образом
C y j[ y ( ) x ( )]
y ( n)
j
H (e )
e
x(n) x ( n ) Cxe j n C x
j T
Частотной характеристикой H (e ) линейной дискретной системы называется
частотная зависимость отношения реакции к дискретному гармоническому воздействию в
установившемся режиме
Амплитудно-частотной характеристикой А(ω) линейной дискретной системы
называется частотная зависимость отношения амплитуды реакции к амплитуде
дискретного гармонического воздействия в установившемся режиме:
Y (e j ) C y С x A( )
A
(
).
j
X (e )
Сx
Cx
Фазочастотной характеристикой ( ) линейной дискретной системы называется
частотная зависимость разности фаз реакции и дискретного гармонического воздействия в
установившемся режиме: ( ) ( ) [ ( ) ( )] ( ) ( ).
y
x
x
x
По определению, АЧХ является безразмерной, а ФЧХ измеряется в радианах.
37.
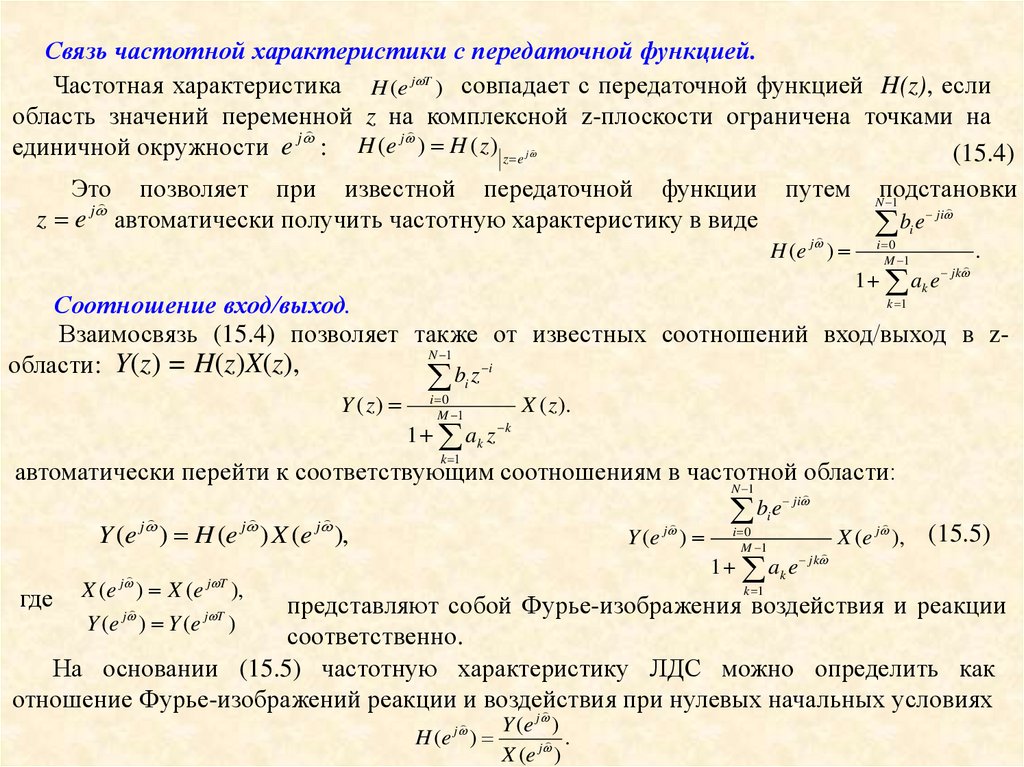
Связь частотной характеристики с передаточной функцией.Частотная характеристика H (e j T ) совпадает с передаточной функцией H(z), если
область значений переменной
z на комплексной z-плоскости ограничена точками на
j
единичной окружности e : H (e j ) H ( z ) z e
(15.4)
Это
позволяет при известной передаточной функции путем Nподстановки
1
j
ji
z e автоматически получить частотную характеристику в виде
b
e
i
j
H ( e j )
i 0
M 1
1 ak e
jk
.
k 1
Соотношение вход/выход.
Взаимосвязь (15.4) позволяет также от известных соотношений вход/выход в zN 1
области: Y(z) = H(z)X(z),
b z i
Y ( z)
i 0
M 1
i
1 ak z
X ( z ).
k
k 1
автоматически перейти к соответствующим соотношениям в частотной области:
N 1
j
j
j
Y (e ) H (e ) X (e ),
Y ( e j )
где
X (e j ) X (e j T ),
bi e ji
i 0
M 1
1 ak e jk
k 1
X (e j ),
(15.5)
представляют собой Фурье-изображения воздействия и реакции
Y (e j ) Y (e j T )
соответственно.
На основании (15.5) частотную характеристику ЛДС можно определить как
отношение Фурье-изображений реакции и воздействия
при нулевых начальных условиях
Y (e j )
.
H (e )
X (e j )
j
38.
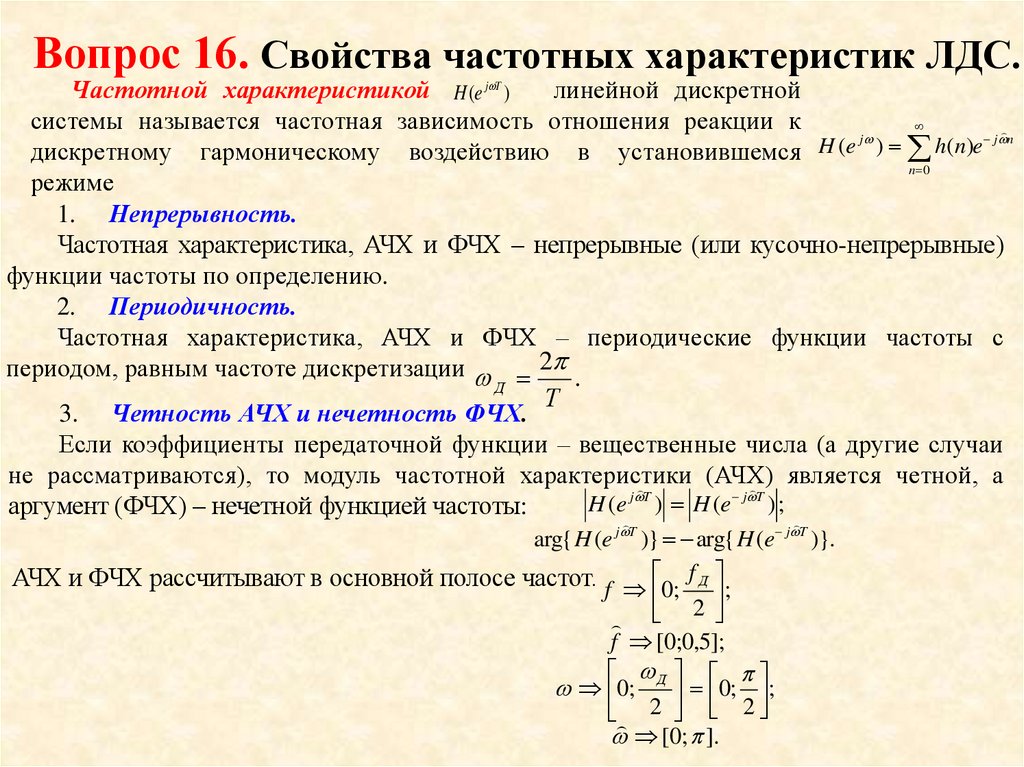
Вопрос 16. Свойства частотных характеристик ЛДС.Частотной характеристикой H (e j T )
линейной дискретной
системы называется частотная зависимость отношения реакции к
j
j n
H
(
e
)
h
(
n
)
e
дискретному гармоническому воздействию в установившемся
n 0
режиме
1. Непрерывность.
Частотная характеристика, АЧХ и ФЧХ – непрерывные (или кусочно-непрерывные)
функции частоты по определению.
2. Периодичность.
Частотная характеристика, АЧХ и ФЧХ – периодические функции частоты с
периодом, равным частоте дискретизации 2 .
Д
Т
3. Четность АЧХ и нечетность ФЧХ.
Если коэффициенты передаточной функции – вещественные числа (а другие случаи
не рассматриваются), то модуль частотной характеристики
(АЧХ)
является четной, а
H (e j T ) H (e j T ) ;
аргумент (ФЧХ) – нечетной функцией частоты:
j T
)} arg{ H (e
АЧХ и ФЧХ рассчитывают в основной полосе частот. f 0; f Д ;
2
f [0;0,5];
0; Д 0; ;
2 2
[0; ].
arg{ H (e
j T
)}.
39. Вопрос 17. Структуры рекурсивных ЛДС.
Рекурсивным ЛДС соответствуют три основных вида математического представленияпередаточной функции H(z):
а) дробно-рациональный;
б) произведение множителей второго порядка;
в) сумма дробей второго порядка, которые определяют три основные структуры:
- прямую;
- каскадную;
- параллельную.
Прямая структура определяется передаточной функцией H(z), представленной в
N 1
дробно-рациональном виде (в общем виде)
bi z i
H ( z)
и отображает разностное уравнение
i 0
M 1
1 ak z
,
k
k 1
N 1
M 1
i 0
k 1
y (nT ) bi x[( n i )T ] ak y[( n k )T ],
Структура называется канонической, если число элементов задержки в ней
минимально и равно порядку передаточной функции – max{(M-1), (N-1)}.
40.
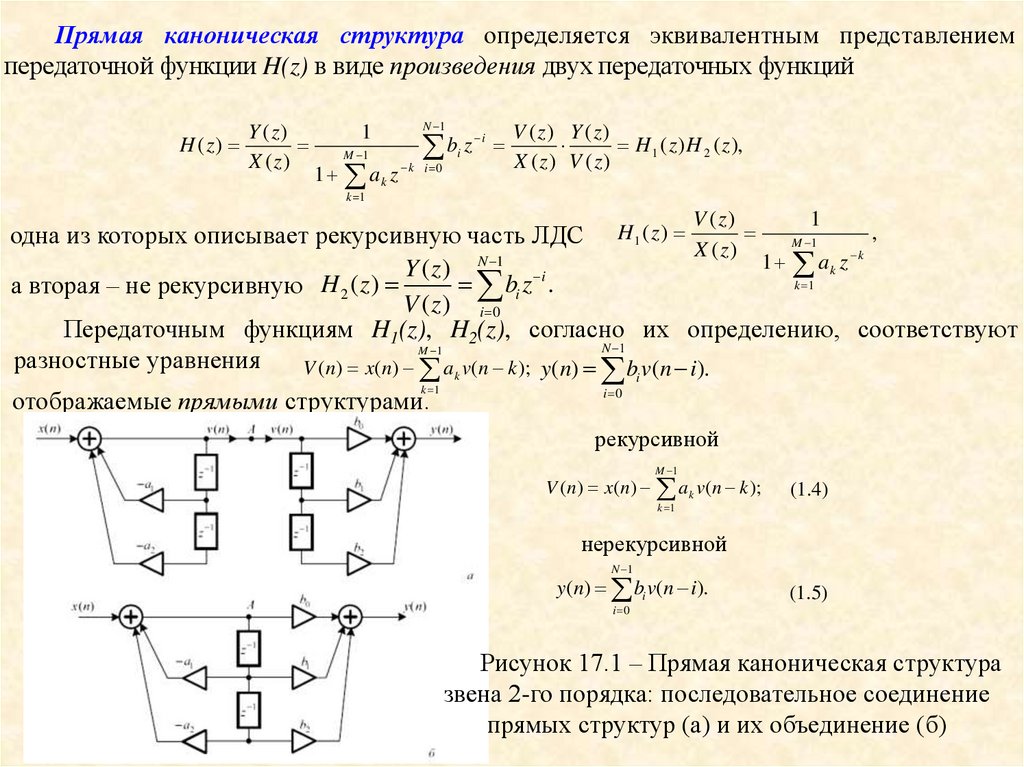
Прямая каноническая структура определяется эквивалентным представлениемпередаточной функции H(z) в виде произведения двух передаточных функций
H ( z)
Y ( z)
X ( z)
1
M 1
1 a k z k
N 1
b z
i 0
i
i
V ( z) Y ( z)
H 1 ( z ) H 2 ( z ),
X ( z) V ( z)
k 1
V ( z)
1
,
одна из которых описывает рекурсивную часть ЛДС H 1 ( z ) X ( z ) M 1
k
1 ak z
Y ( z) N 1 i
k 1
bi z .
а вторая – не рекурсивную H 2 ( z)
V ( z ) i 0
Передаточным функциям H1(z), H2(z), согласно их определению, соответствуют
N 1
M 1
разностные уравнения
V (n) x(n) a k v(n k ); y(n)
b v(n i).
k 1
отображаемые прямыми структурами.
i
i 0
рекурсивной
M 1
V (n) x(n) a k v(n k );
(1.4)
k 1
нерекурсивной
N 1
y(n) bi v(n i).
i 0
(1.5)
Рисунок 17.1 – Прямая каноническая структура
звена 2-го порядка: последовательное соединение
прямых структур (а) и их объединение (б)
41.
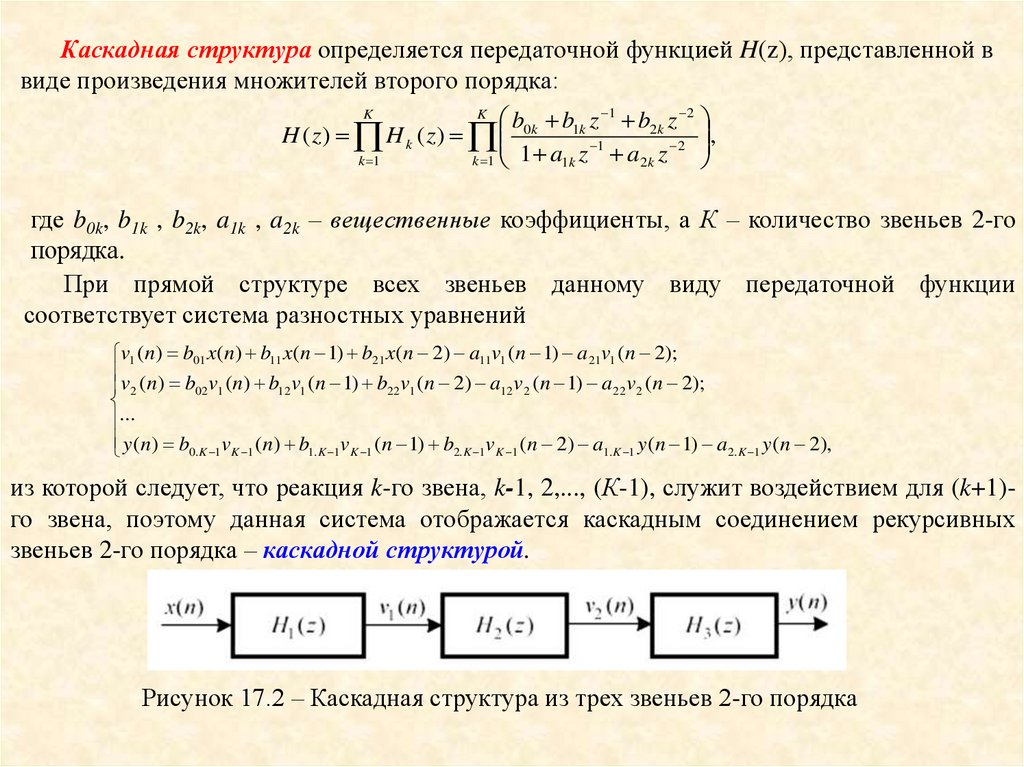
Каскадная структура определяется передаточной функцией H(z), представленной ввиде произведения множителей второго порядка:
b0 k b1k z 1 b2 k z 2
,
H ( z ) H k ( z )
1
2
1
a
z
a
z
k 1
k 1
1k
2k
K
K
где b0k, b1k , b2k, a1k , a2k – вещественные коэффициенты, а К – количество звеньев 2-го
порядка.
При прямой структуре всех звеньев данному виду передаточной функции
соответствует система разностных уравнений
v1 (n) b01 x(n) b11 x(n 1) b21 x(n 2) a11v1 (n 1) a 21v1 (n 2);
v (n) b v (n) b v (n 1) b v (n 2) a v (n 1) a v (n 2);
2
02 1
12 1
22 1
12 2
22 2
...
y (n) b0. K 1v K 1 (n) b1. K 1v K 1 (n 1) b2. K 1v K 1 (n 2) a1. K 1 y (n 1) a 2. K 1 y (n 2),
из которой следует, что реакция k-го звена, k-1, 2,..., (К-1), служит воздействием для (k+1)го звена, поэтому данная система отображается каскадным соединением рекурсивных
звеньев 2-го порядка – каскадной структурой.
Рисунок 17.2 – Каскадная структура из трех звеньев 2-го порядка
42.
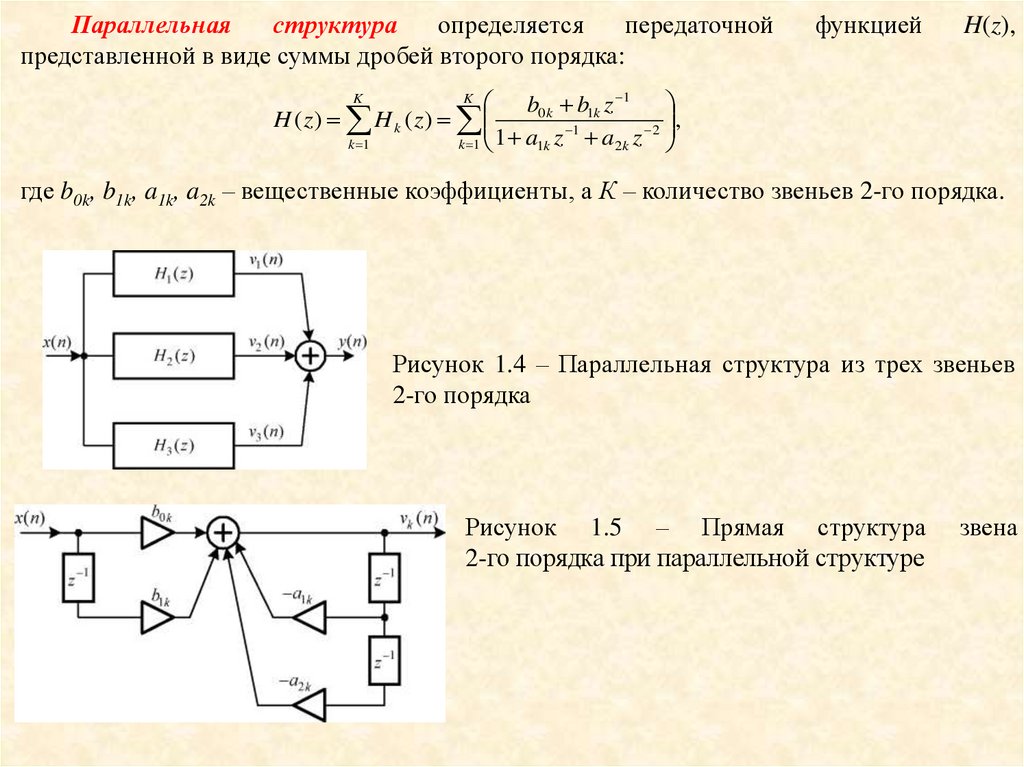
Параллельнаяструктура
определяется
передаточной
представленной в виде суммы дробей второго порядка:
функцией
H(z),
b0 k b1k z 1
,
H ( z ) H k ( z )
1
2
1
a
z
a
z
k 1
k 1
1k
2k
K
K
где b0k, b1k, a1k, a2k – вещественные коэффициенты, а К – количество звеньев 2-го порядка.
Рисунок 1.4 – Параллельная структура из трех звеньев
2-го порядка
Рисунок 1.5 – Прямая структура
2-го порядка при параллельной структуре
звена
43.
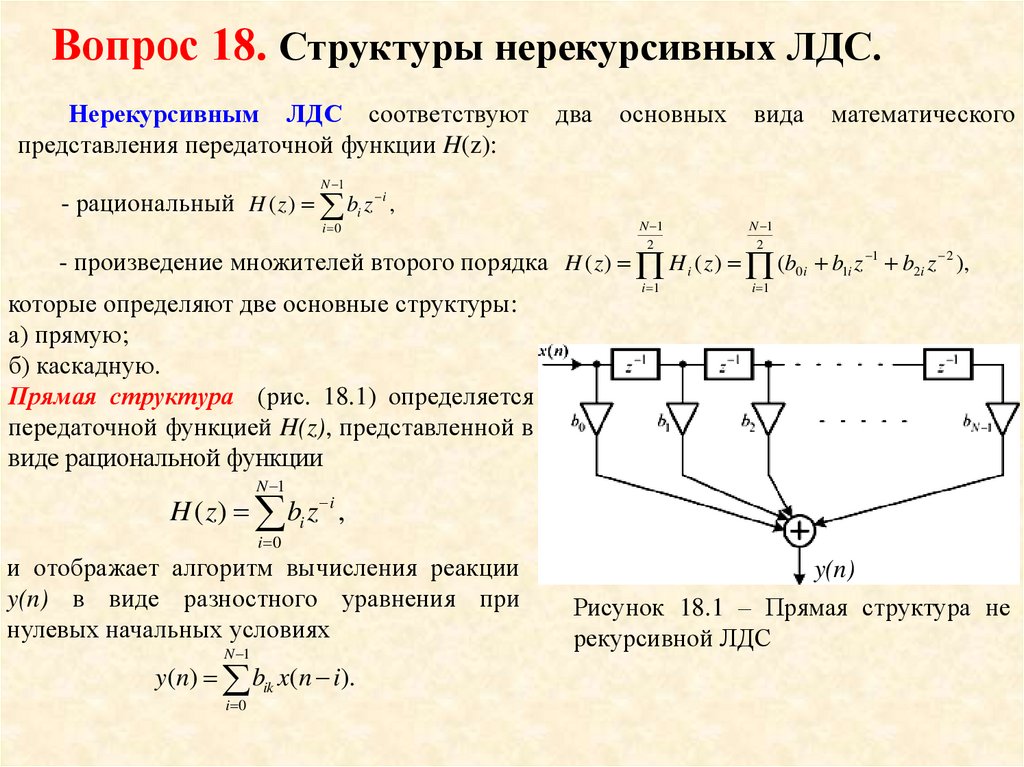
Вопрос 18. Структуры нерекурсивных ЛДС.Нерекурсивным ЛДС соответствуют
представления передаточной функции H(z):
два
основных
вида
математического
N 1
- рациональный H ( z ) bi z i ,
i 0
N 1
2
N 1
2
i 1
i 1
- произведение множителей второго порядка H ( z ) H i ( z ) (b0i b1i z 1 b2i z 2 ),
которые определяют две основные структуры:
а) прямую;
б) каскадную.
Прямая структура (рис. 18.1) определяется
передаточной функцией H(z), представленной в
виде рациональной функции
N 1
H ( z) bi z i ,
i 0
и отображает алгоритм вычисления реакции
y(n) в виде разностного уравнения при
нулевых начальных условиях
N 1
y(n) bik x(n i).
i 0
y(n)
Рисунок 18.1 – Прямая структура не
рекурсивной ЛДС
44.
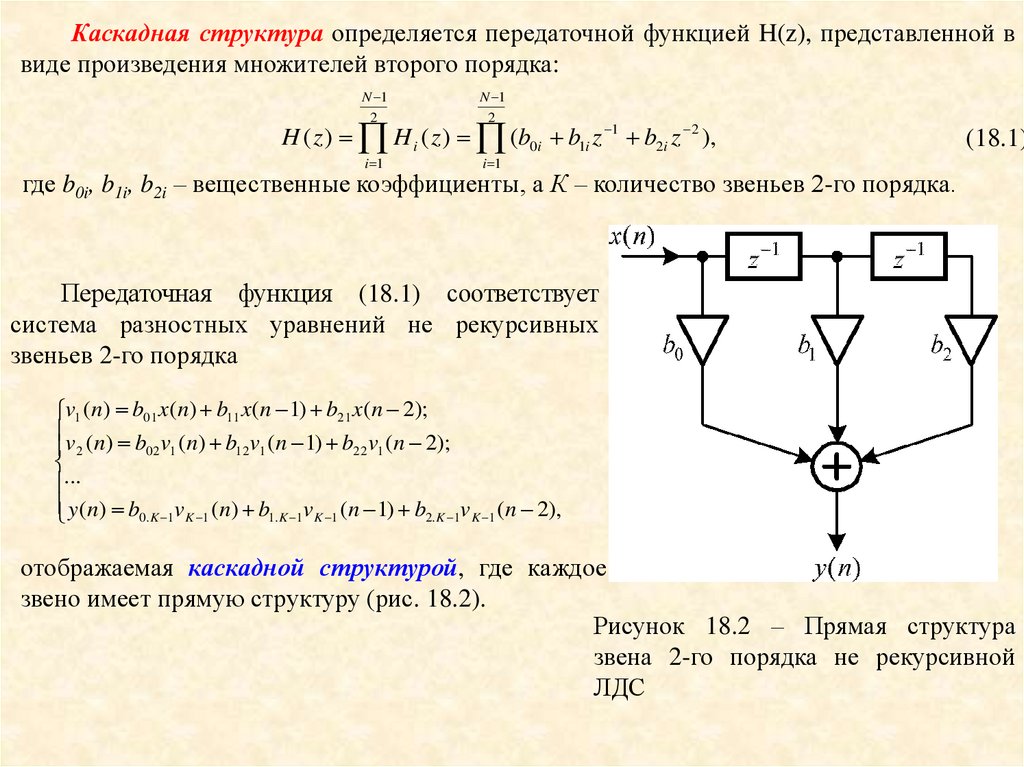
Каскадная структура определяется передаточной функцией H(z), представленной ввиде произведения множителей второго порядка:
N 1
2
N 1
2
H ( z ) H i ( z ) (b0i b1i z 1 b2i z 2 ),
i 1
(18.1)
i 1
где b0i, b1i, b2i – вещественные коэффициенты, а К – количество звеньев 2-го порядка.
Передаточная функция (18.1) соответствует
система разностных уравнений не рекурсивных
звеньев 2-го порядка
v1 (n) b01 x(n) b11 x( n 1) b21 x(n 2);
v (n) b v (n) b v (n 1) b v (n 2);
2
02 1
12 1
22 1
...
y (n) b0. K 1v K 1 (n) b1. K 1v K 1 (n 1) b2. K 1v K 1 (n 2),
отображаемая каскадной структурой, где каждое
звено имеет прямую структуру (рис. 18.2).
Рисунок 18.2 – Прямая структура
звена 2-го порядка не рекурсивной
ЛДС
45.
Вопрос 19. Понятие состояния ЛДС.Состояние системы – это есть некоторая (внутренняя) характеристика системы
, значение которой в
настоящий момент времени определяет текущее значение реакции
и оказывает влияние на её будущее.
q (n 1) F q (n), x(n) ;
y(n) G q (n), x(n) .
46.
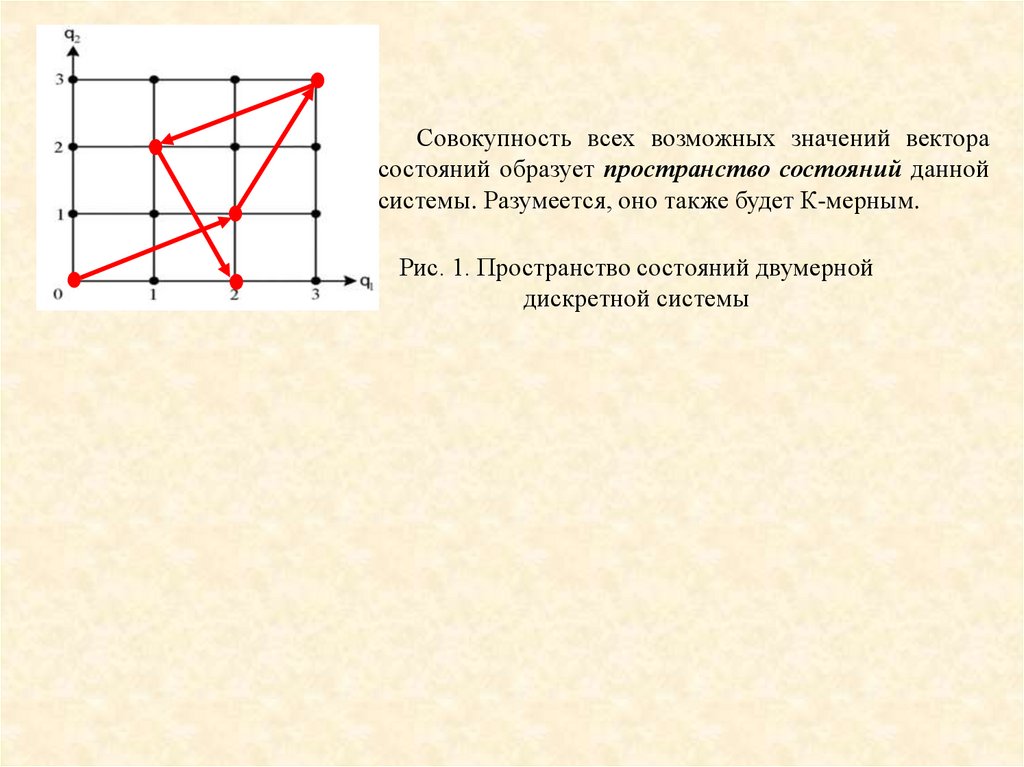
Совокупность всех возможных значений векторасостояний образует пространство состояний данной
системы. Разумеется, оно также будет К-мерным.
Рис. 1. Пространство состояний двумерной
дискретной системы
47.
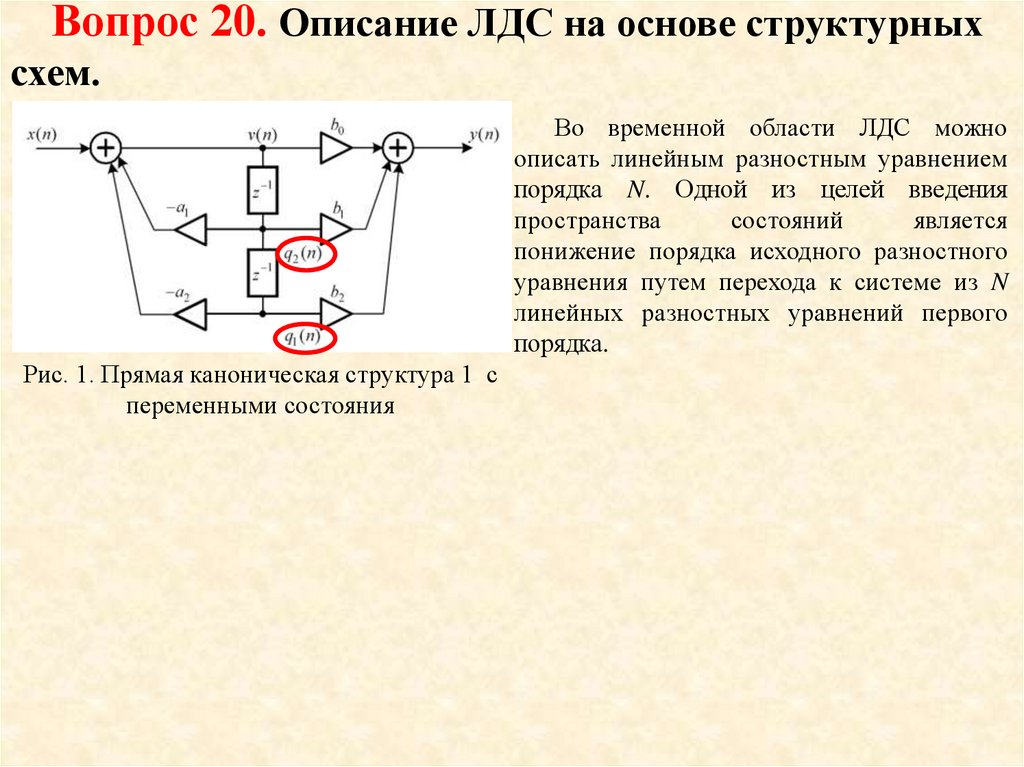
Вопрос 20. Описание ЛДС на основе структурныхсхем.
Во временной области ЛДС можно
описать линейным разностным уравнением
порядка N. Одной из целей введения
пространства
состояний
является
понижение порядка исходного разностного
уравнения путем перехода к системе из N
линейных разностных уравнений первого
порядка.
Рис. 1. Прямая каноническая структура 1 с
переменными состояния
48.
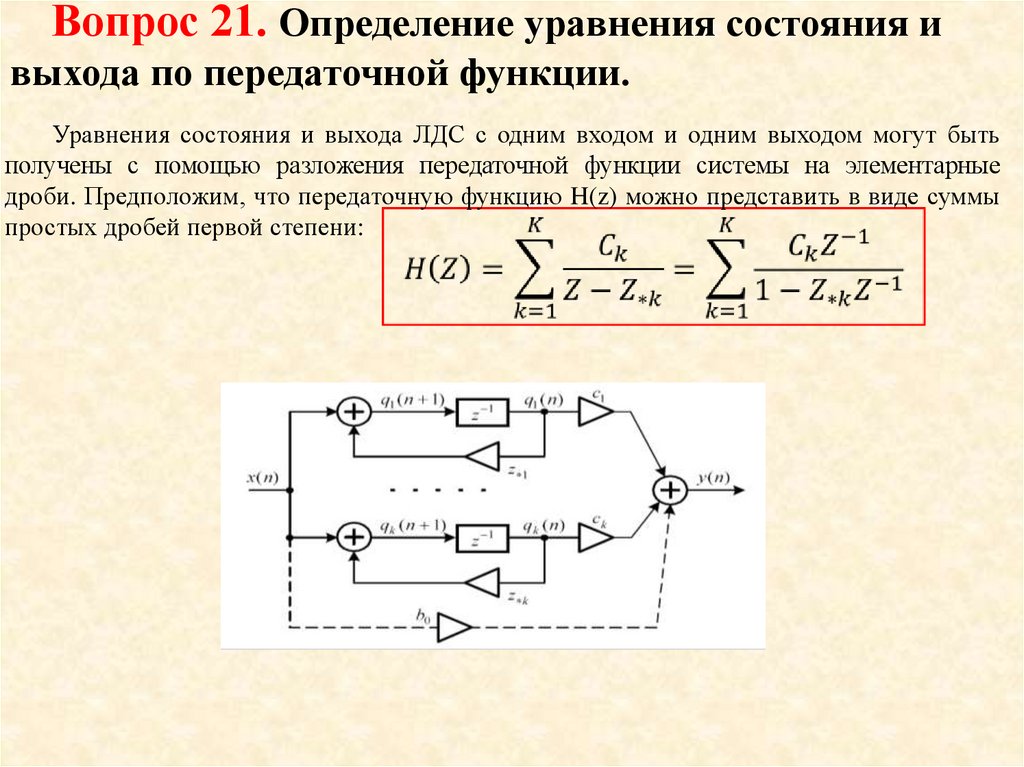
Вопрос 21. Определение уравнения состояния ивыхода по передаточной функции.
Уравнения состояния и выхода ЛДС с одним входом и одним выходом могут быть
получены с помощью разложения передаточной функции системы на элементарные
дроби. Предположим, что передаточную функцию H(z) можно представить в виде суммы
простых дробей первой степени:
49. Вопрос 22. Дискретное преобразование Фурье периодической последовательности.
Дискретным преобразованием Фурье (ДПФ) называется пара связанных взаимнооднозначно преобразований, которую принято записывать в видеN 1
- прямое ДПФ
(22.1)
X (k ) x(n)WNnk , k 0,1,..., ( N 1);
n 0
- обратное ДПФ
1
x ( n)
N
N 1
X (k )W
k 0
nk
N
, n 0,1,..., ( N 1);
(22.2)
где: n – дискретное нормированное время n=nT/T;
k – дискретная нормированная частота k=k / ;
N – одинаковые периоды последовательностей x(n) и X(k);
x(n), k=0, 1, …, (N-1 )– периодическая последовательность на периоде, которую
называют N-точечной последовательностью;
W
nk
N
e
j
2
nk
N
– поворачивающий множитель;
X (k )WN nk X (k )e
j
2
nk
N
– k-я дискретная гармоника.
Для периодической последовательности x(n) с периодом N ДПФ X(k) (22.1) совпадает
с ее спектром Xp(k) с точностью до множителя 1/N:
1
X p (k )
N
N 1
x
n 0
p
( n)e
j
2
nk
N
1
X (k ).
N
(22.3)
50.
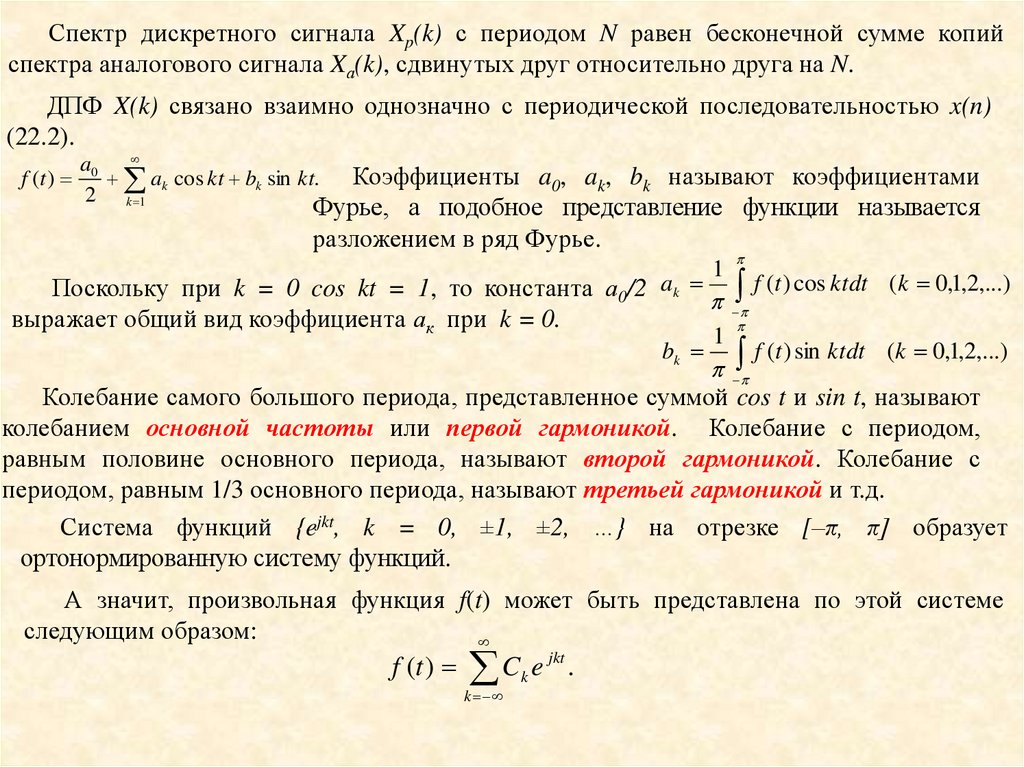
Спектр дискретного сигнала Xp(k) с периодом N равен бесконечной сумме копийспектра аналогового сигнала Xа(k), сдвинутых друг относительно друга на N.
ДПФ X(k) связано взаимно однозначно с периодической последовательностью x(n)
(22.2).
a0
f (t )
ak cos kt bk sin kt.
2 k 1
Коэффициенты a0, ak, bk называют коэффициентами
Фурье, а подобное представление функции называется
разложением в ряд Фурье.
1
Поскольку при k = 0 cos kt = 1, то константа а0/2 ak
выражает общий вид коэффициента ак при k = 0.
1
f (t ) cos ktdt
(k 0,1,2,...)
Колебание самого большого периода, представленное суммой cos t и sin t, называют
колебанием основной частоты или первой гармоникой. Колебание с периодом,
равным половине основного периода, называют второй гармоникой. Колебание с
периодом, равным 1/3 основного периода, называют третьей гармоникой и т.д.
Система функций {ejkt, k = 0, ±1, ±2, …} на отрезке [–π, π] образует
ортонормированную систему функций.
bk
f (t ) sin ktdt (k 0,1,2,...)
А значит, произвольная функция f(t) может быть представлена по этой системе
следующим образом:
f (t )
C e
k
k
jkt
.
51.
Это и есть разложение в комплексный ряд Фурье. Коэффициенты Сk называютсякомплексными коэффициентами Фурье и, подобно действительным коэффициентам
Фурье, вычисляются как скалярное произведение f(t) и ejkt. То есть
1
Ck
2
f (t )e
jkt
dt.
Множество абсолютных величин коэффициентов Сk (k = 0, ±1,±2, …) Ck
ak2 bk2
bk 2
называют спектром амплитуд, а совокупность аргументов Сk arg Ck arctg
ak
– спектром фаз. Множество величин |Сk|2 называют спектром мощности.
Спектр амплитуд показывает, как велика составляющая каждой гармоники внутри
сигнала.
ДПФ (22.1) и (22.2) справедливо как для периодической, так и для конечной последовательности,
причем результат вычислений в обоих случаях будет одинаковым, однако его трактовка – различной, а
именно:
а) в случае периодической последовательности:
- N-точечная последовательность x(n) – это один период данной последовательности;
- N-точечная последовательность X(k) – это N комплексных гармоник периодического спектра на
периоде;
б) в случае конечной последовательности:
- N-точечная последовательность x(n) – конечная последовательность длины N;
- N-точечная последовательность X(k) – N равноотстоящих отсчетов непрерывного
периодического спектра X (e jk T ) на периоде Д.
52.
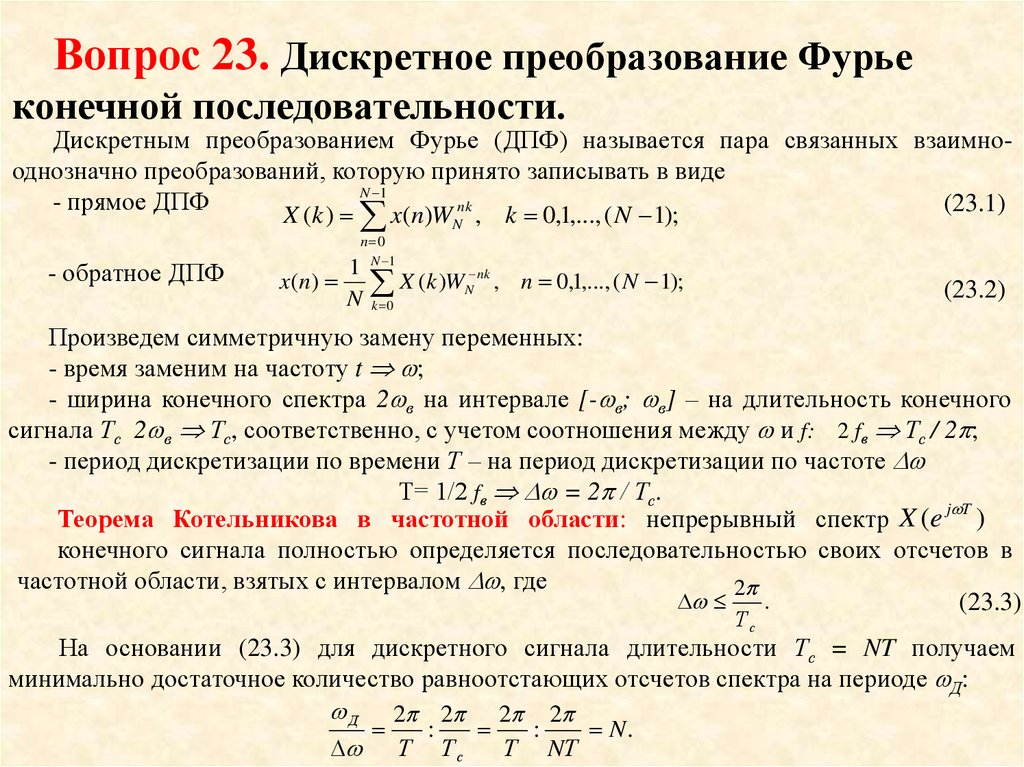
Вопрос 23. Дискретное преобразование Фурьеконечной последовательности.
Дискретным преобразованием Фурье (ДПФ) называется пара связанных взаимнооднозначно преобразований, которую принято записывать в виде
N 1
- прямое ДПФ
(23.1)
X (k ) x(n)WNnk , k 0,1,..., ( N 1);
n 0
- обратное ДПФ
1
x ( n)
N
N 1
X (k )W
k 0
nk
N
, n 0,1,..., ( N 1);
(23.2)
Произведем симметричную замену переменных:
- время заменим на частоту t ;
- ширина конечного спектра 2 в на интервале [- в; в] – на длительность конечного
сигнала Тс 2 в Тс, соответственно, с учетом соотношения между и f: 2 fв Тс / 2 ;
- период дискретизации по времени Т – на период дискретизации по частоте
Т= 1/2 fв = 2 / Тс.
Теорема Котельникова в частотной области: непрерывный спектр X (e j T )
конечного сигнала полностью определяется последовательностью своих отсчетов в
частотной области, взятых с интервалом , где
2
.
(23.3)
Тс
На основании (23.3) для дискретного сигнала длительности Тс = NT получаем
минимально достаточное количество равноотстающих отсчетов спектра на периоде Д:
Д 2 2 2 2
:
:
N.
Т Т с
Т NТ
53.
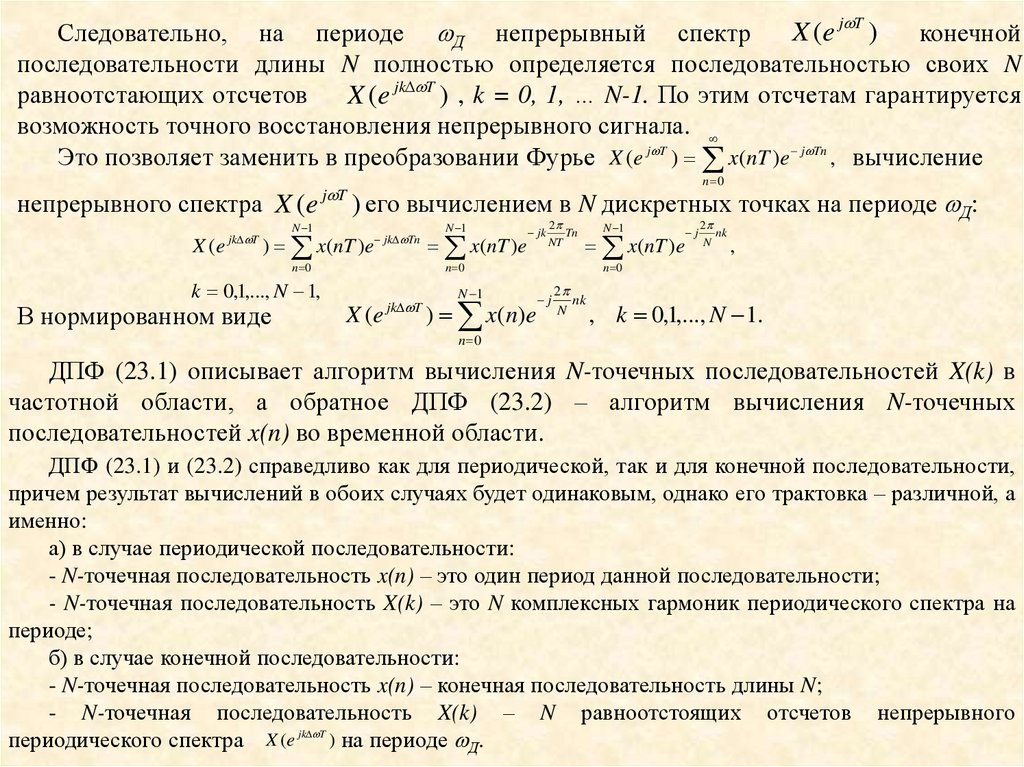
X (e j T )Следовательно, на периоде Д непрерывный спектр
конечной
последовательности длины N полностью определяется последовательностью своих N
равноотстающих отсчетов
X (e jk T ) , k = 0, 1, … N-1. По этим отсчетам гарантируется
возможность точного восстановления непрерывного сигнала.
Это позволяет заменить в преобразовании Фурье X (e j T ) x(nT )e j Tn , вычисление
непрерывного спектра X (e
X (e
jk T
N 1
j T
n 0
) его вычислением в N дискретных точках на периоде Д:
) x(nT )e
jk Tn
n 0
k 0,1,..., N 1,
В нормированном виде
X (e
N 1
x(nT )e
jk
2
Tn
NT
n 0
jk T
N 1
) x(n)e
N 1
x(nT )e
j
2
nk
N
,
n 0
j
2
nk
N
, k 0,1,..., N 1.
n 0
ДПФ (23.1) описывает алгоритм вычисления N-точечных последовательностей X(k) в
частотной области, а обратное ДПФ (23.2) – алгоритм вычисления N-точечных
последовательностей x(n) во временной области.
ДПФ (23.1) и (23.2) справедливо как для периодической, так и для конечной последовательности,
причем результат вычислений в обоих случаях будет одинаковым, однако его трактовка – различной, а
именно:
а) в случае периодической последовательности:
- N-точечная последовательность x(n) – это один период данной последовательности;
- N-точечная последовательность X(k) – это N комплексных гармоник периодического спектра на
периоде;
б) в случае конечной последовательности:
- N-точечная последовательность x(n) – конечная последовательность длины N;
- N-точечная последовательность X(k) – N равноотстоящих отсчетов непрерывного
периодического спектра X (e jk T ) на периоде Д.
54.
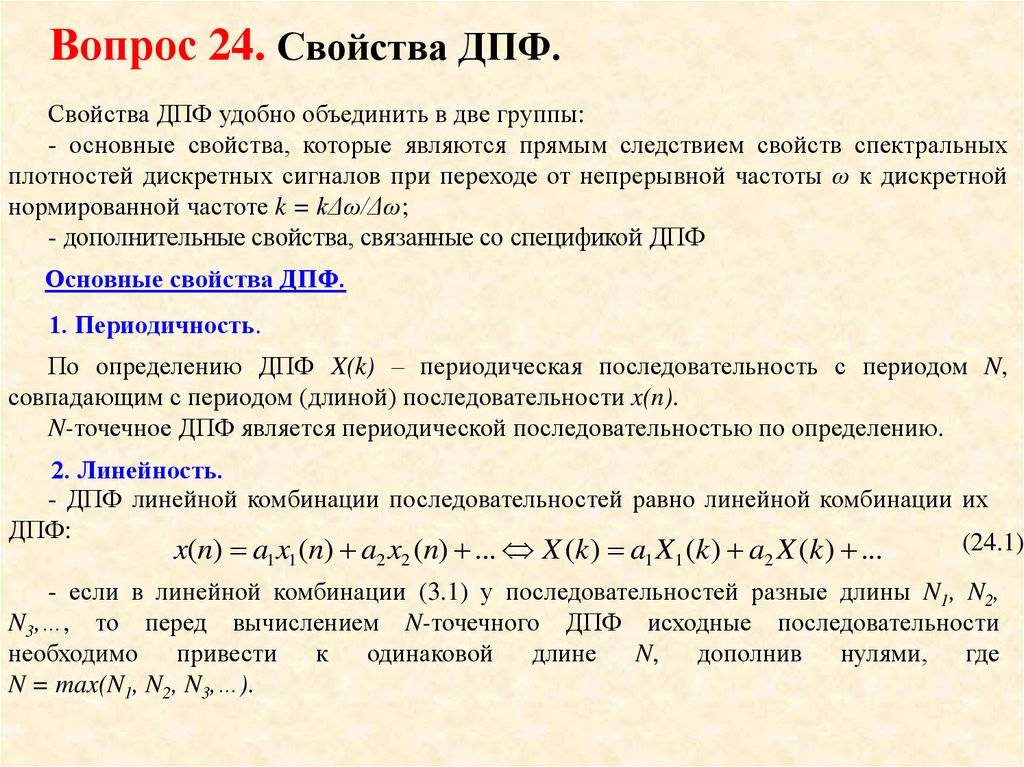
Вопрос 24. Свойства ДПФ.Свойства ДПФ удобно объединить в две группы:
- основные свойства, которые являются прямым следствием свойств спектральных
плотностей дискретных сигналов при переходе от непрерывной частоты ω к дискретной
нормированной частоте k = kΔω/Δω;
- дополнительные свойства, связанные со спецификой ДПФ
Основные свойства ДПФ.
1. Периодичность.
По определению ДПФ X(k) – периодическая последовательность с периодом N,
совпадающим с периодом (длиной) последовательности x(n).
N-точечное ДПФ является периодической последовательностью по определению.
2. Линейность.
- ДПФ линейной комбинации последовательностей равно линейной комбинации их
ДПФ:
(24.1)
x(n) a x (n) a x (n) ... X (k ) a X (k ) a X (k ) ...
1 1
2 2
1
1
2
- если в линейной комбинации (3.1) у последовательностей разные длины N1, N2,
N3,…, то перед вычислением N-точечного ДПФ исходные последовательности
необходимо
привести
к одинаковой длине
N, дополнив
нулями, где
N = max(N1, N2, N3,…).
55.
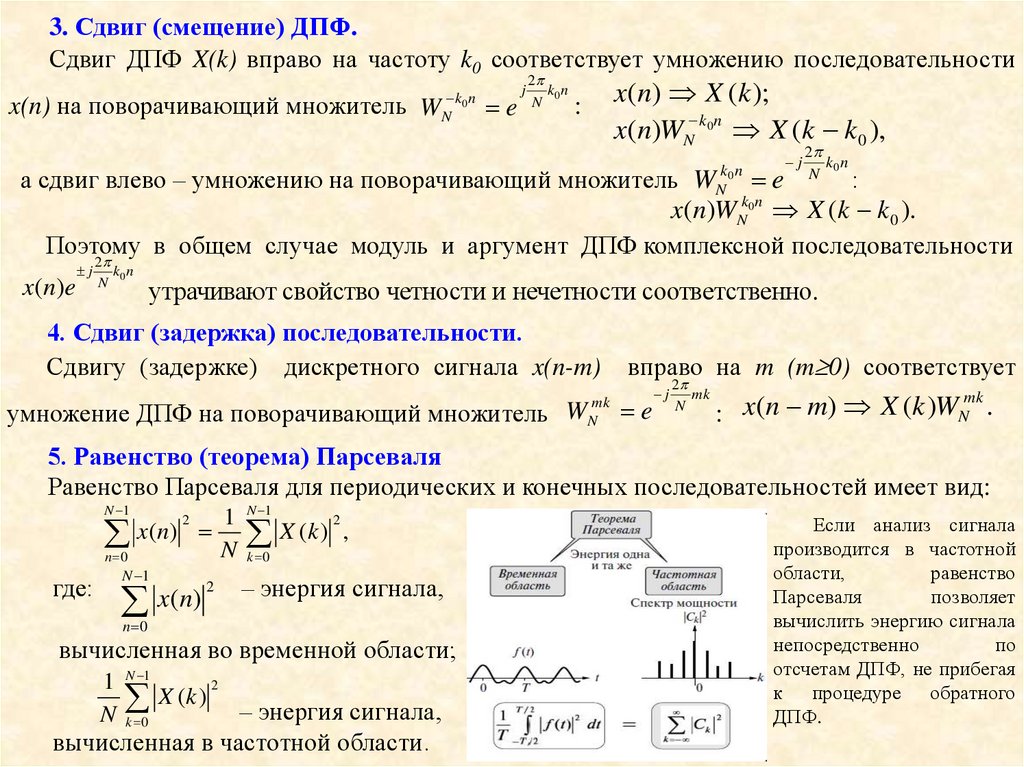
3. Сдвиг (смещение) ДПФ.Сдвиг ДПФ X(k) вправо на частоту k0 соответствует умножению последовательности
x(n) на поворачивающий множитель W
k0 n
N
e
j
2
k0 n
N
x(n) X (k );
x(n)WN k0n X (k k 0 ),
:
j
2
k0 n
N
а сдвиг влево – умножению на поворачивающий множитель WNk0 n e
:
k0 n
x(n)WN X (k k 0 ).
Поэтому в общем случае модуль и аргумент ДПФ комплексной последовательности
x ( n )e
j
2
k0 n
N
утрачивают свойство четности и нечетности соответственно.
4. Сдвиг (задержка) последовательности.
Сдвигу (задержке) дискретного сигнала x(n-m)
умножение ДПФ на поворачивающий множитель W
mk
N
вправо на m (m 0) соответствует
e
j
2
mk
N
mk
x
(
n
m
)
X
(
k
)
W
:
N .
5. Равенство (теорема) Парсеваля
Равенство Парсеваля для периодических и конечных последовательностей имеет вид:
N 1
n 0
1
x ( n)
N
2
N 1
где:
x ( n)
2
N 1
X (k )
2
,
k 0
– энергия сигнала,
n 0
вычисленная во временной области;
1
N
N 1
X (k )
2
– энергия сигнала,
вычисленная в частотной области.
k 0
Если анализ сигнала
производится в частотной
области,
равенство
Парсеваля
позволяет
вычислить энергию сигнала
непосредственно
по
отсчетам ДПФ, не прибегая
к процедуре обратного
ДПФ.
56.
6. Свойство симметрии (четность модуля и нечетность аргумента).а) Для вещественной последовательности x(n) модуль ДПФ |X(k)| – четная, а аргумент
arg{X(k)} – нечетная функция частоты k, следовательно: X (k ) X ( N k ) ;
arg{ X (k )} arg{ X ( N k )},
Это означает, что для модуля и аргумента будут соблюдаться соответственно условия
симметрии и антисимметрии.
ДПФ вещественной последовательности достаточно определить в основной полосе
частот [0;N/2].
б) Если N-точечная последовательность x(n) вещественная и для неё выполняется
условие симметрии x(n) x( N n), то её N-точечное ДПФ будет также вещественным.
Дополнительные свойства, присущие исключительно ДПФ.
1. Круговая (периодическая, циклическая) свертка: вычисление с помощью ДПФ.
Понятие круговой свертки используется
только
для периодических
последовательностей.
Круговой
сверткой
двух
периодических
N-точечных
последовательностей x1(n), x2(n) называется периодическая N-точечная последовательность
N 1
N 1
m 0
m 0
y (n) x1 (m) x2 (n m) x1 (n m) x2 (m).
ДПФ
круговой
последовательностей.
свертки
равно
произведению
ДПФ
сворачиваемых
57.
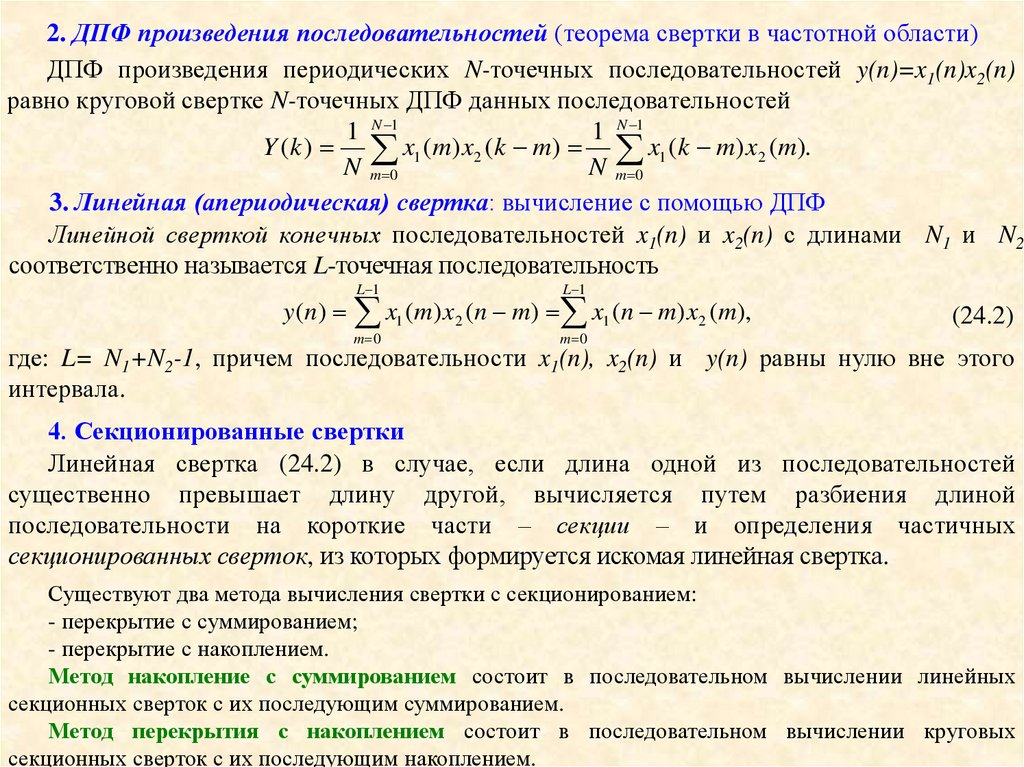
2. ДПФ произведения последовательностей (теорема свертки в частотной области)ДПФ произведения периодических N-точечных последовательностей y(n)=x1(n)x2(n)
равно круговой свертке N-точечных ДПФ данных последовательностей
1 N 1
1 N 1
Y (k ) x1 (m) x2 (k m) x1 (k m) x2 (m).
N m 0
N m 0
3. Линейная (апериодическая) свертка: вычисление с помощью ДПФ
Линейной сверткой конечных последовательностей x1(n) и x2(n) с длинами N1 и N2
соответственно называется L-точечная последовательность
L 1
L 1
y (n) x1 (m) x2 (n m) x1 (n m) x2 (m),
m 0
m 0
(24.2)
где: L= N1+N2-1, причем последовательности x1(n), x2(n) и y(n) равны нулю вне этого
интервала.
4. Секционированные свертки
Линейная свертка (24.2) в случае, если длина одной из последовательностей
существенно превышает длину другой, вычисляется путем разбиения длиной
последовательности на короткие части – секции – и определения частичных
секционированных сверток, из которых формируется искомая линейная свертка.
Существуют два метода вычисления свертки с секционированием:
- перекрытие с суммированием;
- перекрытие с накоплением.
Метод накопление с суммированием состоит в последовательном вычислении линейных
секционных сверток с их последующим суммированием.
Метод перекрытия с накоплением состоит в последовательном вычислении круговых
секционных сверток с их последующим накоплением.
58. Вопрос 25. Алгоритм БПФ с прореживанием во времени.
Математической основой спектрального анализа является ДПФ:N 1
X (k ) x(n)WNnk , k 0,1,..., ( N 1),
(25.1)
n 0
При фиксированном значении k для вычисления суммы потребуется N операций сложения и
(N−1)≈N
операций
умножения,
всего
2N
операций.
В
целом,
при
k =0,1, ..., (N − 1) потребуется 2N2 арифметических операций с комплексными числами.
Порядок
вычислительной
сложности
ДПФ
относительно
длины
N
исходной
последовательности равен О(N2).
Быстрым преобразованием Фурье (БПФ − Fast Fourier Transform, FFT) называют
набор алгоритмов, предназначенных для быстрого вычисления ДПФ, поэтому после
аббревиатуры БПФ ставят уточнение: алгоритм БПФ с основанием 2, 4, 8, 16, с
взаимно-простыми делителями и др.
Существуют два эквивалентных по эффективности алгоритма БПФ с основанием 2: с
прореживанием по времени и прореживанием по частоте.
Идея алгоритма БПФ с прореживанием по времени заключается в поэтапном
вычислении N-точечного ДПФ на ν этапах, на каждом из которых текущее ДПФ
вычисляется через ДПФ вдвое меньшей размерности.
59.
Начальные условия одноэтапного алгоритма БПФ формируются в результатеразбиения исходной N-точечной последовательности на две N/2-точечные:
- четных отсчетов: x(0), x(2), ..., x(N − 2);
(25.2)
- нечетных отсчетов: x(1), x(3), ... , x(N − 1).
(25.3)
Начальная расстановка отсчетов производиться по правилу:
N/2 четных отсчетов; N/2 нечетных отсчетов
x(0), x(2), ..., x(N − 2); x(1), x(3), ... , x(N − 1).
Это позволяет разбить сумму в ДПФ (25.1) на две:
N
1
2
N
1
2
n 0
n 0
X (k ) x(2n)WN2 nk x(2n 1)WN( 2 n 1) k
N
1
2
N
1
2
n 0
n 0
x(2n)WN2 nk WNk x(2n 1)WN2 nk
(25.4)
k 0,1,..., ( N 1),
где x(2n) и x(2n +1) – 2N-точечные
последовательности четных (25.2) и нечетных
(25.3) отсчетов соответственно.
60.
Начальные условия ν-этапного алгоритма БПФ формируются в результате ν-кратногоразбиения исходной последовательности до тех пор, пока не будет получено 2/N групп 2точечных последовательностей, каждая из которых содержит один четный и один нечетный
отсчет.
Полученную последовательность называют прореженной, и отсюда название
алгоритма БПФ – с прореживанием по времени.
На каждом этапе (кроме первого) ДПФ вычисляется через ДПФ вдвое меньшей
размерности (рис. 25.1) по формуле, подобной (25.4):
X mi (k ) X 2i m1 (k ) WLk X 2i m1 1 (k );
i
X (k L 2) X 2i m1 (k ) WLk X 2i m1 1 (k );
m
m 0,1,..., ( M 1);
k 0,1,..., L 1.
2
где i =1, 2, …, ν – номер этапа БПФ;
M – количество L-точечных ДПФ на i-м этапе: M 2v i ;
L – размерность ДПФ на i-м этапе:
L 2i ;
m – номера L-точечных ДПФ на i-м этапе;
k – номера отсчета ДПФ;
2m и (2m+1) – номера L/2-точечных ДПФ на (i − 1)-м этапе.
(25.5)
(25.6)
(25.7)
61.
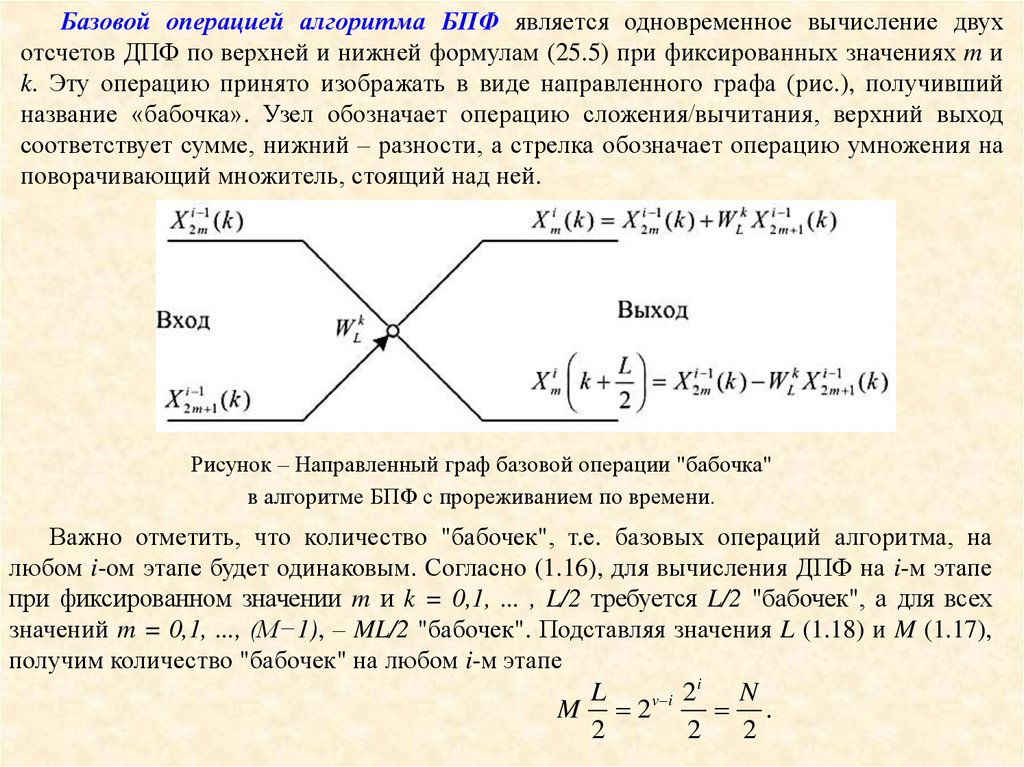
Базовой операцией алгоритма БПФ является одновременное вычисление двухотсчетов ДПФ по верхней и нижней формулам (25.5) при фиксированных значениях m и
k. Эту операцию принято изображать в виде направленного графа (рис.), получивший
название «бабочка». Узел обозначает операцию сложения/вычитания, верхний выход
соответствует сумме, нижний – разности, а стрелка обозначает операцию умножения на
поворачивающий множитель, стоящий над ней.
Рисунок – Направленный граф базовой операции "бабочка"
в алгоритме БПФ с прореживанием по времени.
Важно отметить, что количество "бабочек", т.е. базовых операций алгоритма, на
любом i-ом этапе будет одинаковым. Согласно (1.16), для вычисления ДПФ на i-м этапе
при фиксированном значении m и k = 0,1, ... , L/2 требуется L/2 "бабочек", а для всех
значений m = 0,1, ..., (M−1), – ML/2 "бабочек". Подставляя значения L (1.18) и M (1.17),
получим количество "бабочек" на любом i-м этапе
i
L
N
v i 2
M 2
.
2
2
2
62. Вопрос 26. Основные определения и классификация цифровых фильтров.
ВопросОсновные
определения
классификация цифровых фильтров.
26.
и
Под цифровым фильтром (ЦФ) в широком смысле понимают любую цифровую
систему (цепь), которая согласно заданному оператору (рис. 26.1) y(n) F{~
x (n)}
осуществляет преобразование действующей на ее входе аддитивной смеси ~x (n) x(n) (n)
цифрового сигнала х(п) либо его параметров с помехой (n).
Структура ЦФ (структура ЛДС)
определяется
видом
(математическим
представлением) передаточной функции
H(z) и отображает алгоритм вычисления
реакции y(nT), описываемый в виде
линейного разностного уравнения или
системы таких уравнений.
Рисунок 26.1 – Цифровой фильтр до реализации
(линейная дискретная система)
Цифровой фильтр в узком смысле – это частотно-избирательная цепь, которая
обеспечивает селекцию цифровых сигналов по частоте.
Частотно-избирательные цифровые фильтры предназначены для селекции
спектральных составляющих входной последовательности: их выделения в полосе
пропускания и подавления в полосе задерживания, причем эти полосы частот заранее
известны и разнесены.
63.
Выделяют четыре основных типа избирательности ЦФ:- фильтры нижних частот (ФНЧ);
- фильтры верхних частот (ФВЧ);
- полосовые фильтры (ПФ);
- режекторные фильтры (РФ).
Частотно-избирательный фильтр может быть реализован на базе КИХ и БИХфильтра. Как и все цифровые системы, цифровые фильтры делятся на два обширных
класса:
- нерекурсивные (КИХ-фильтр);
- рекурсивные (БИХ-фильтр).
В свою очередь, в каждом из этих классов выделяют линейные и нелинейные
фильтры.
Рассматриваемые фильтры являются линейными, т.е. оператор F x (n) отвечает
свойствам линейности:
F a1~
x1 (n) a2 ~
x2 (n) a1F ~
x1 (n) a2 F ~
x2 (n) .
Формой представления линейного оператора F, в частности, является разностное
уравнение.
N 1
H ( z ) bi z i
КИХ-фильтры с рациональной передаточной функцией
не имеют
i 0
аналоговых прототипов и обладают возможностью обеспечить строго линейную ФЧХ,
N 1
исключающую фазовые искажения реакции.
bi z i
БИХ-фильтры с дробно-рациональной передаточной функцией H ( z ) i M 0 1
имеют
1
a k z k
k 1
аналоговые прототипы, и это позволило применить хорошо
математический аппарат при переходе к адекватному БИХ-фильтру.
развитый
64. Вопрос 27. Синтез цифровых фильтров.
Синтез ЦФ в общем случае включает синтез передаточной функции и структурыфильтра по заданной его частотной или импульсной характеристике и оценку требуемой
разрядности чисел для коэффициентов фильтра и отсчетов входного, выходного и
внутренних сигналов.
Синтез передаточной функции ЦФ H(z) по заданной частотной характеристике Hd(jw)
заключается в ее аппроксимации и определении коэффициентов передаточной функции.
Под заданной (аппроксимируемой) частотной характеристикой ЦФ Hd(jw) подразумевается,
как правило, его амплитудно-частотная характеристика |Hd(jw)|. Возможен также синтез
ЦФ и по заданной фазочастотной характеристике.
Используемые методы синтеза разделяются на аналитические, итерационные и
численные.
Аналитические методы обеспечивают решение задачи аппроксимации в замкнутой
аналитической форме. К ним относятся методы синтеза рекурсивных фильтров (РФ) по
данным аналогового фильтра-прототипа и в первую очередь метод билинейного
преобразования.
Итерационные методы, сочетая аналитический и численный подходы, не дают
однозначного соответствия параметров расчетных и заданных характеристик и требуют,
как правило, ряда уточняющих процедур. Итерационными являются методы весовых
функций и частотной выборки, используемые для синтеза нерекурсивных фильтров (НФ).
Численные методы основываются на непосредственной аппроксимации заданной
частотной характеристики с минимальной погрешностью в соответствии с определенными
критериями оптимальности.
65.
Требования к фильтрам могут формулироваться как во временной (рис. 27.1, а),так и в частотной областях (рис. 27.1, б), что определяется назначением фильтра и
областью его описания.
Во временной области (рис. 27.1, а) требования
могут задаваться к импульсной h(n) или
переходной g(n) характеристике при широких
допусках к частотным свойствам фильтра.
Рисунок 2.1 – Описание фильтра во временной (а)
и в частотной (б) областях
В частотной области (рис. 27.1, б) обычно синтезируются избирательные
фильтры. При этом требования могут предъявляться:
- только к АЧХ или к характеристике ослабления (затухания) без каких-либо
ограничений на ФЧХ;
- только к ФЧХ, когда важно сохранение фазовых, а потому и временных
соотношений между гармоническими составляющими принимаемого сигнала. Это
фазовые корректоры, у которых АЧХ не зависит от частоты, т. е. A( ~) const на всем
интервале частот 0 ~ ;
- одновременно и к АЧХ, и к ФЧХ.
Требования к фильтрам включают в себя: (перечислить, показать на примере
ФНЧ, ФВЧ, ПЧ либо РФ)
66. Вопрос 28. Условия безискажённой передачи сигналов.
Условия безискажённой передачи сигналов рассматриваются как во временной, таки частотных областях.
Во временной области безискажённая передачи сигнала означает, что реакция
системы y(nT) представляет собой копию воздействия х(nT). Отсюда очевидно
требование: значение y(nT) должно быть пропорциональны значениям х(nT) с точностью
до вещественной постоянной k, чему соответствует свойство линейной системы.
Из выше сказанного следуют два условия безискажённой передачи сигнала во
временной области:
- значение реакции системы должно быть пропорциональны значениям воздействия
y (nT ) kx(nT )
- время задержки сигнала должно быть постоянным ГВЗ n0Т
На этих основаниях формальное выражение условий безискаённой передачи сигнала
(28.1)
х(nT) во временной области определяется соотношением y(nT ) kx[(n n0 )T ],
Условия безискажённой передачи в частотной области возможно получить из
выражения (28.1), если воспользоваться свойствами задержки и линейности
преобразования Фурье дискретного сигнала.
Рассмотреть более подробно
67. Вопрос 29. Структурные схемы КИХ-фильтров с линейной ФЧХ.
КИХ-фильтр описывается передаточной функциейN 1
H ( z ) h( n) z
n 0
n
R
h( n) z n .
n 0
Длину N импульсной характеристики и порядок R передаточной функции называют,
соответственно длиной и порядком КИХ-фильтра.
КИХ-фильтр обладает строго линейной ФЧХ (с точностью до скачков на π), если для
его импульсной характеристики выполняется одно из двух условий:
- симметрии: h(n) = h(N-1-n) ;
- антисимметрии: h(n) = - h (N-1-n).
Этим условиям отвечают четыре вида
импульсных характеристик (рис. 29.1):
1) симметричная:
- нечетной длины N (порядок R
б)
а)
четный) – рис. 29.1, а;
- четной длины N (порядок R
нечетный) – рис. 29.1, б;
2) антисимметричная:
- нечетной длины N (порядок R
г)
в)
четный) – рис. 29.1, в;
Рисунок 29.1 – Импульсные характеристики КИХфильтров с линейной ФЧХ: симметричная
- четной длины N (порядок R
нечетной
(а)
и
четной
(б)
длины,
нечетный) – рис. 29.1, г.
антисимметричная нечетной (в) и четной (г) длины
68.
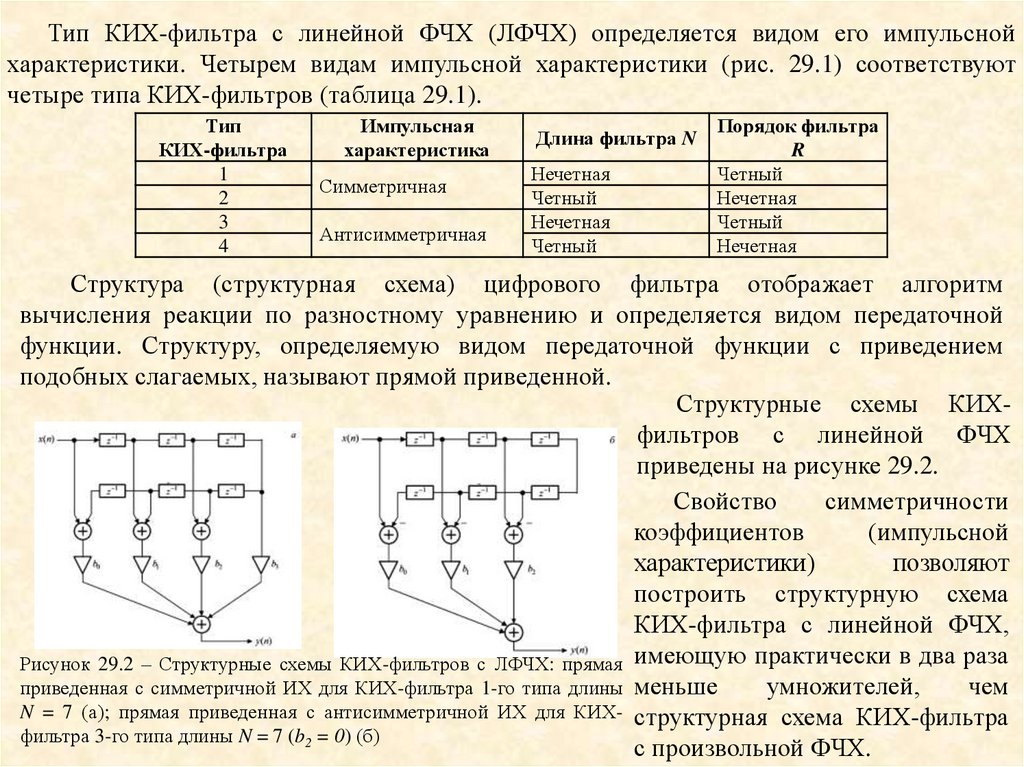
Тип КИХ-фильтра с линейной ФЧХ (ЛФЧХ) определяется видом его импульснойхарактеристики. Четырем видам импульсной характеристики (рис. 29.1) соответствуют
четыре типа КИХ-фильтров (таблица 29.1).
Тип
КИХ-фильтра
1
2
3
4
Импульсная
характеристика
Симметричная
Антисимметричная
Длина фильтра N
Нечетная
Четный
Нечетная
Четный
Порядок фильтра
R
Четный
Нечетная
Четный
Нечетная
Структура (структурная схема) цифрового фильтра отображает алгоритм
вычисления реакции по разностному уравнению и определяется видом передаточной
функции. Структуру, определяемую видом передаточной функции с приведением
подобных слагаемых, называют прямой приведенной.
Структурные схемы КИХфильтров с линейной ФЧХ
приведены на рисунке 29.2.
Свойство
симметричности
коэффициентов
(импульсной
характеристики)
позволяют
построить структурную схема
КИХ-фильтра с линейной ФЧХ,
Рисунок 29.2 – Структурные схемы КИХ-фильтров с ЛФЧХ: прямая имеющую практически в два раза
приведенная с симметричной ИХ для КИХ-фильтра 1-го типа длины меньше
умножителей,
чем
N = 7 (а); прямая приведенная с антисимметричной ИХ для КИХ- структурная схема КИХ-фильтра
фильтра 3-го типа длины N = 7 (b2 = 0) (б)
с произвольной ФЧХ.
69. Вопрос 30. Частотные характеристики КИХ фильтров.
ТипКИХ-фильтра
1
2
3
4
Импульсная
характеристика
Симметричная
Антисимметричная
Длина фильтра N
Нечетная
Четный
Нечетная
Четный
Комплексная частотная характеристика в общем виде
j
Порядок фильтра
R
Четный
Нечетная
Четный
Нечетная
j
H (e ) B (e )e
N 1
j
m
2
2
B( )e
N 1
j
m
2
2
Из этого следует важное соотношение меду АЧХ и амплитудной функцией:
A( ) H (e j ) B( ) ,
Комплексные передаточные функции КИХ-фильтров типа 1 и 3 имеют нечетную
длину N (четный порядок R), но разную симметрию импульсной характеристики:
Для КИХ-фильтров типа 1 обладают симметричной импульсной характеристикой
R
R
2b0 cos 2b1 cos 1 ... b R
2
2
2
R
2
R
B1 (e j ) ak cos k ,
- амплитудная функция
k 0
2
R
2
R
j
A
(
)
B
(
e
)
ak cos k ,
- амплитудно-частотная характеристика 1
1
k 0
2
R
(
)
- фазочастотная характеристика
1
2
d 1 ( T ) R
- групповое время задержки 1ГВЗ d 2 T ,
(симметричными коэффициентами bi = bN-1-i)
j
H 1 (e ) e
R
j
2
70.
Комплексные передаточные функции КИХ-фильтров типа 2 и 4 имеют четную длинуN (четный порядок R), но разную симметрию импульсной характеристики:
- фильтры типа 2 обладают симметричной импульсной характеристикой
(симметричными коэффициентами bi = bN-1-i);
j
H (e ) b0 b1e
j
... b R 1 e
j
R 1
2
b R 1 e
2
-
R 1
2
R 1
2
R 1
2
a
k 0
k
R
cos k ,
2
R
R 1 1
- фазочастотная характеристика 2 ( ) 2 2 2
- групповое время задержки 2 ГВЗ
... b1e j ( R 1) b0 e jR .
2
R
B2 ( ) ak cos k ,
k 0
2
амплитудно-частотная характеристика A2 ( ) B2 ( )
- амплитудная функция
j
d 2 ( T ) R
N 1
N
Т
T
Т Т ,
d
2
2
2
2
71. Вопрос 31. БИХ-фильтры.
Синтез БИХ-фильтра заключается в расчете его передаточной функцииN 1
H ( z)
bi z i
i 0
M 1
1
a k z k
k 1
Порядком БИХ-фильтра называют порядок рациональной функции знаменателя R =
(M-1) при (N-1) (M-1) (по умолчанию).
БИХ-фильтры характеризуются следующими особенностями:
- нелинейной ФЧХ;
- необходимости проверки на устойчивость.
Оптимальным называют БИХ-фильтр минимального порядка R при заданных
требованиях к АЧХ.
Методика синтеза частотно-изберательных БИХ-фильтров (НЧ, ВЧ, ПФ, РФ)
базируется на хорошо развитом аппарате расчета аналоговых фильтров и преобразовании
передаточной функции аналогового фильтра в передаточную функцию цифрового
фильтра. Характер преобразования определяется методом отображения р-области в zобласти.
Процедура синтеза БИХ-фильтров на основе АФП включает в себя:
1. Задание требований к АЧХ БИХ-фильтра (задание требований к цифровому
фильтру).
2. Выбор метода синтеза БИХ-фильтра.
3. Выбор типа аналогового фильтра-прототипа.
72.
Четырем разновидностям аппроксимирующих функций соответствуют четыре типаАФП: фильтр Баттерворта, фильтр Чебышева I рода, фильтр Чебышева II рода, фильтр
Золотарева–Кауэра (эллиптический).
4. Формирование требований к АЧХ АФП.
5. Расчет передаточной функции АФП Hа(p).
6. Расчет передаточной функции БИХ-фильтра H(z) на основе Hа(p).
7. Выбор структуры БИХ-фильтра.
Среди методов синтеза БИХ-фильтров на основе АФП имеются два следующих
метода:
- метод инвариантности импульсной характеристики (метод стандартного zпреобразования);
- метод билинейного Z-преобразования.
Синтез БИХ-фильтров методом инвариантности ИХ
Метод позволяет получить такой цифровой фильтр, импульсная характеристика
которого
h(n) хорошо моделирует непрерывную импульсную характеристику g(t)
аналогового фильтра-прототипа.
Основу разработки метода составляют две идеи.
Первая из них – получить передаточную функцию БИХ-фильтра H(z) в результате
стандартного z-преобразования его импульсной характеристики h(nT): H ( z ) h(nT ) z n .
n 0
Отсюда название – метод стандартного z-преобразования.
73.
Вторая идея заключается в том, чтобы получить аналитическое представление h(nT)на основе известной передаточной функции АФП Hа(p), импульсная характеристика
которого hа(t) совпадает с импульсной характеристикой БИХ-фильтра h(nT) в дискретных
точках t =nT: h(nT ) ha (t ) t nT
Отсюда название – метод инвариантности импульсной характеристики
Под инвариантностью импульсной характеристики понимается равенство
отсчетов импульсной характеристики цифрового фильтра h(n) значениями отсчетов
импульсной характеристики аналогового фильтра g(t), взятым с периодом дискретизации
Т.
Искомая передаточная функция БИХ-фильтра, импульсная характеристика которого
инвариантна импульсной характеристики аналогового прототипа M / 2
M /2
b b z 1
H ( z)
H ( z) 1 a
i 1
i
i 1
0i
1i
1
a2i z 2
1i z
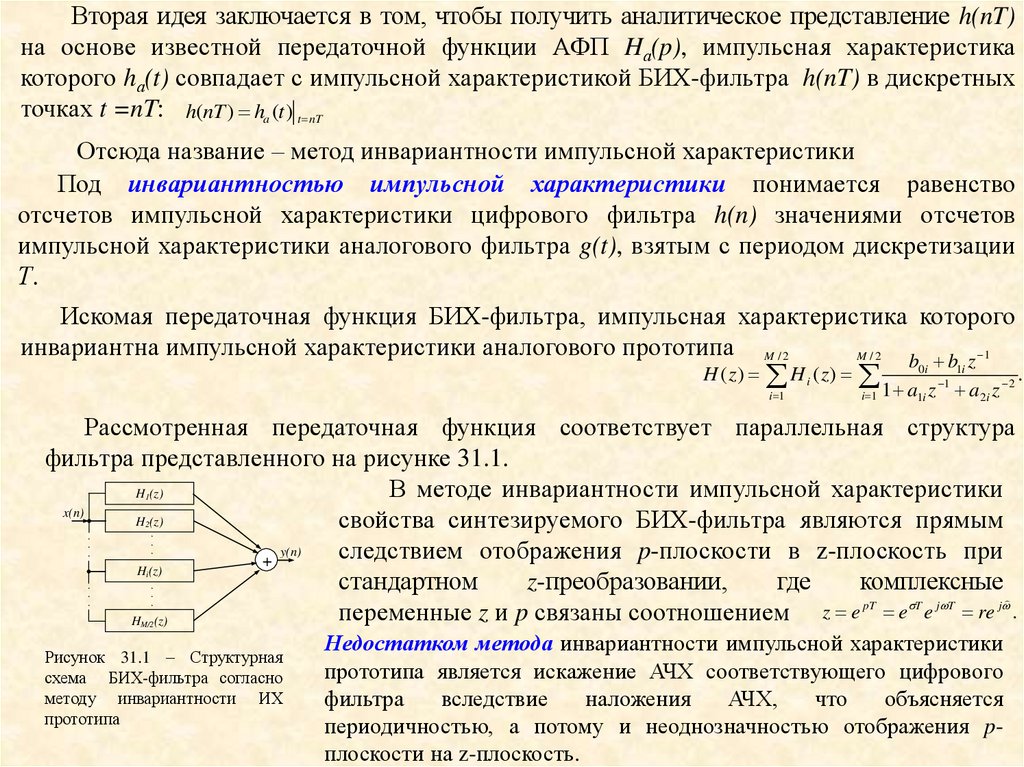
Рассмотренная передаточная функция соответствует параллельная структура
фильтра представленного на рисунке 31.1.
В методе инвариантности импульсной характеристики
H (z)
x(n)
H (z)
свойства синтезируемого БИХ-фильтра являются прямым
y(n)
следствием отображения p-плоскости в z-плоскость при
+
H (z)
стандартном
z-преобразовании,
где
комплексные
переменные z и p связаны соотношением z e pT e T e j T re j .
H (z)
1
2
.
.
.
.
.
.
i
.
.
.
.
.
.
M/2
Рисунок 31.1 – Структурная
схема БИХ-фильтра согласно
методу инвариантности ИХ
прототипа
Недостатком метода инвариантности импульсной характеристики
прототипа является искажение АЧХ соответствующего цифрового
фильтра
вследствие
наложения
АЧХ,
что
объясняется
периодичностью, а потому и неоднозначностью отображения pплоскости на z-плоскость.
.
74.
Метод билинейного z-преобразованияИдея
метода
сформулирована
в
его
названии:
при
отображении
p-плоскости в z-плоскость вместо стандартного z-преобразования применяют билинейное
z-преобразование.
Соотношения, связывающие комплексные переменные p и z при билинейном zпреобразовании,
на
основании
их
связи
в
стандартном
1
z-преобразовании следующие:
p ln z.
z e pT ,
Путем преобразования ряда Тейлора
p
1 z 1
1 z
.
1
T
Обратная зависимость имеет вид: z
p
.
p
В этом случае, для того чтобы от известной дробно-рациональной передаточной
функции АФП Hа(р) перейти к дробно-рациональной передаточной функции БИХфильтра H(z), достаточно выполнить замену переменных
H ( z ) H a ( p)
p
1 z 1
.
1 z 1
Данное преобразование называют билинейным z-преобразованием. Методика расчета
передаточной функции АФП Hа(р) заключается в определении ее нулей и полюсов. В
методе билинейного z-преобразования это позволяет автоматически перевести их в z p
область, применив формулу z p , и представить передаточную функцию БИХфильтра H(z) в виде произведения простейших множителей
M 1
1 k z 1
H ( z ) b0
1
k 1 1 k z
, от которого
L
1 b1k z 1 b2k z 2
H ( z ) b0k
1 z 1 z 2
k 1
1k
2k
далее переходят к произведению множителей второго порядка
с
вещественными коэффициентами. Такому представлению H(z) соответствует каскадная
структура БИХ-фильтра.
К недостатку метода можно отнести нелинейную зависимость между частотами БИХ-фильтра
и АФП, что обязывает к пересчету граничных частот ПП и ПЗ в требованиях к АЧХ АФП.
75. Вопрос 32. Адаптивная фильтрация.
Под термином адаптация приментиельно к системе цифровой обработки сигналов(ЦОС) понимают изменение их параметров и, возможно, структуры с целью достижения
заданного эффекта в результате приспособления к неизвестным заранее внешним
условиям. Главным свойством адаптивной системы можно считать изменяющееся во
времени функционирование с саморегуляцией.
Адаптивные системы классифицируются по наличию или отсуствию обратной связи.
Процесс адаптации без обратной связи состоит из измерений характеристик входных
воздействий (сигналов и шумов), введения этой информации в алгоритм ЦОС и
использования результатов для целенаправленного регулирования. При адаптации с
обратной связью, кроме того, автоматически оценивается влияние параметров
регулирования на выходной сигнал.
Входной
сигнал
Устройство
ЦОС
Выходной
сигнал
Входной
сигнал
Устройство
ЦОС
Выходной
сигнал
Алгоритм
адаптации
Параметры
среды
Алгоритм
адаптации
а)
Параметры
среды
Вычислитель
параметров
б)
Рисунок 32.1 – Структурные схемы адаптивных систем:
без обратной связи (а), с обратной связью (б)
Под
обратной
связью
в
адаптивном фильтре понимают связь
алгоритма адаптации с сигналом ошибки
e(n), благодаря которой обеспечивается
подстройка
(расчет)
параметров
адаптивного фильтра.
76.
Главным достоинством адаптивных систем с обратной связью является ихвысокая работоспособность во многих прикладных задачах, где аналитические
методы синтеза трудноприменимы либо отсуствуют. Например, существенная
нелинейность структуры или нестационарносить входных сигналов открывают
широкие возможности по введению обратной связи в процесс адаптации.
Недостатком системы с обратной связью является неустойчивость
(расходимость) процесса адаптации.
Процесс адаптивной фильтрации включает два этапа проведения оценивания:
- оценивание искомого выходного сигнала фильтра;
- оценивание коэффициентов фильтра (отсчетов импульсной характеристики),
необходимых для достижения поставленной цели.
Второй этап необходим из-за априорной неопределенности входного сигнала,
подвергшегося воздействию шумовой помехи.
Синтез устройства оценки на базе адаптивного КИХ-фильтра существенно зависит от
определения стоимостной функции, в соответствии с которым качество оценивания
характеризуется разностью между выходным сигналом устройства оценки и истинным
значением, подлежащим оцениванию: e(n) y (n) ~y (n),
где e(n) – ошибка оценивания;
у(n) – оцениваемый случайный сигнал; ~
y ( n ) – его
статистическая оценка.
y (n)
Наиболее часто используемым при проведении оптимального оценивания ~
является метод наименьших квадратов (МНК). При этом среднеквадратичная ошибка
определяется как
2
2
~
E e ( n) E y ( n) y ( n) .
77.
Среди алгоритмов рекуррентного вычисления параметров адаптивного фильтраполучили распространение следующие алгоритмы:
- калмановское оценивание случайного сигнала;
- алгоритм LMS (Least Mean Squares) и его модификация NLMS (Normalized LMS). В
литературе они также известны как метод наименьших квадратов (МНК) и
нормированный метод наименьших квадратов (НМНК);
- алгоритм RLS (Recursive Least Squares). В литературе он также известен как
рекуррентный метод наименьших квадратов (РНК);
- итерационные алгоритмы адаптации.
- градиентные методы адаптации.
Калмановское оценивание случайного сигнала. Калмановское оценивание
реализует рекурсивную процедуру адаптации, основанную на авторегрессионной модели
процесса генерирования сигнала. Если входной сигнал x(n) является случайным и
марковским, то его можно представить в виде выхода ЛДС первого порядка, возбуждаемой
белым шумом w(n) с нулевым средним и дисперсией w2 .
Алгоритм LMS. В алгоритме LMS реализовано рекуррентное вычисление оценок
~
параметров адаптивного фильтра h (n)
В качестве критерия наилучшего приближения выходного сигнала y(n) к образцовому
сигналу d(n) выбран минимум квадрата сигнала ошибки e(n).
2
N 1
e (n) d (n) hi x(n i) min .
h
i 0
2
78.
Алгоритм RLS. В алгоритме RLS реализовано рекуррентное вычисление оптимальныхпараметров адаптивного фильтра h(n) (в установившемся режиме).
В качестве критерия наилучшего приближения выходного сигнала y(n) к образцовому
сигналу d(n) выбран минимум суммы квадратов сигнала ошибки е(n):
2
N 1
2
e (n) d (n) hi x(n i) min ,
h
n 0
n 0
i 0
L 1
L 1
Итерационные алгоритмы адаптации. Синтез итерационных алгоритмов адаптации
основывается на результатах математической теории оптимизации как без ограничений,
так и с ограничением.
Градиентные методы адаптации. Градиентным называется метод, при котором
каждый последующий вектор H(n+1) выбирается в направлении – F[H(n)], где F[H(n)]
– вектор-столбец частных производных функционала качества, называемый градиентом:
dF
Таким образом, математическое выражение алгоритма адаптации
dh
0
H (n 1) H (n) F [ H (n)].
принимает вид
dF
dh1
F [ H (n)] . .
.
.
dF
dhN 1